
PrIcosa: High-Precision 3D Camera Calibration with Non-Overlapping
Field of Views
Oguz Kedilioglu
1,∗ a
, Tasnim Tabassum Nova
1,∗ b
, Martin Landesberger
2 c
, Lijiu Wang
3 d
,
Michael Hofmann
3 e
, Jörg Franke
1 f
and Sebastian Reitelshöfer
1 g
1
Institute for Factory Automation and Production Systems (FAPS),
Friedrich-Alexander-Universität Erlangen-Nürnberg (FAU), 91058 Erlangen, Germany
2
Technische Hochschule Ingolstadt, Ingolstadt, 85049, Germany
3
Heinz Maier-Leibnitz Zentrum (MLZ), Technical University of Munich, Garching, 85748, Germany
Keywords:
3D Camera Calibration, Non-Overlapping Field of Views, Icosahedron, Probabilistic.
Abstract:
Multi-camera systems are being used more and more frequently, from autonomous mobile robots to intelligent
visual servoing cells. Determining the pose of the cameras to each other very accurately is essential for many
applications. However, choosing the most suitable calibration object geometry and utilizing it as effectively
as possible still remains challenging. Disadvantageous geometries provide only subpar datasets, increasing
the need for a larger dataset and decreasing the accuracy of the calibration results. Moreover, an unrefined
calibration method can lead to worse accuracies even with a good dataset. Here, we introduce a probabilistic
method to increase the accuracy of 3D camera calibration. Furthermore, we analyze the effects of the calibra-
tion object geometry on the data properties and the resulting calibration accuracy for the geometries cube and
icosahedron. The source code for this project is available at GitHub (Nova, 2024).
1 INTRODUCTION
Reconciling the two divergent goals of flexibility and
accuracy is becoming an increasingly important task.
As product variety and complexity increase, so do
the demands on automation. To satisfy these re-
quirements, a growing number of sensors are applied.
These sensors must be integrated accurately and ro-
bustly into a coherent system in order to realize their
full potential. That is why the calibration process is
crucial. All subsequent steps rely on its performance.
Optical sensors are one of the most widely used
sensor types for guiding flexible automation hardware
such as industrial 6-axis robot arms. For the calibra-
tion of these camera systems, often 2D calibration
a
https://orcid.org/0000-0002-3916-805X
b
https://orcid.org/0009-0002-2745-6908
c
https://orcid.org/0000-0003-1104-7114
d
https://orcid.org/0009-0005-1338-3228
e
https://orcid.org/0000-0003-4936-9960
f
https://orcid.org/0000-0003-0700-2028
g
https://orcid.org/0000-0002-4472-0208
0∗
These authors contributed equally to this work.
objects are utilized (Li et al., 2013) (D’Emilia and
Di Gasbarro, 2017), (Lv et al., 2015). However 2D
calibration objects only work when all cameras see
the same calibration pattern. If the angles between the
camera axes become too large and the field of views
of the cameras do not overlap, then 3D calibration ob-
jects must be used. They allow the calibration of cam-
eras without overlapping fields of views.
Various 3D geometries are available for the cal-
ibration objects, such as cubes (Tabb and Medeiros,
2019), (Rameau et al., 2022), (An et al., 2018), pyra-
mids (Abedi et al., 2018), or icosahedrons (Ha et al.,
2017). Usually, these objects consist of flat faces,
here called boards, which are arranged into a rigid 3D
structure. Distinct fiducial markers are placed on each
board to enable individual identification. The size and
number of these boards, and their relative pose to each
other determine the quality of the images that can be
captured by a multi-camera system for a given set of
calibration object poses. Too few boards at the cali-
bration object result in fewer detected boards by the
cameras. If the angle between the camera axis and the
board surface normal vector becomes too large, then
the detection accuracy of the boards also suffers. And
Kedilioglu, O., Nova, T. T., Landesberger, M., Wang, L., Hofmann, M., Franke, J. and Reitelshöfer, S.
PrIcosa: High-Precision 3D Camera Calibration with Non-Overlapping Field of Views.
DOI: 10.5220/0013088700003912
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 2: VISAPP, pages
801-809
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
801

if too many boards are added to a calibration object,
then the available surface area per board becomes too
small to contain enough feature points, which hurts
the detection accuracy as well. So finding the right
balance between number of boards, board size and
shape, and relative board arrangement is crucial. This
is where our first contribution comes in. We provide
a quantitative comparison of the 3D board geometries
cube and icosahedron.
Another aspect that we address concerns the cal-
ibration process itself (Figure 1; Step 5). The set of
boards representing the full calibration object and the
set of cameras that have to be calibrated together pro-
vide a combinatorial set of possible equations that
describe their relations to each other, as indicated
in Figure 2. These equations contain homogeneous
transformations between camera-to-board, the cam-
eras themselves, and the boards themselves. The
accuracy of the camera-to-board transformations de-
pends on the detection accuracy and the intrinsic
and extrinsic camera parameters. For determining
camera-to-camera transformations, hand-eye calibra-
tion is used, with its accuracy depending on the num-
ber and variety of the calibration object poses. Con-
sequently, some equations yield less accurate trans-
formations, while others produce better ones. The
quality of these equations ultimately affects the cal-
ibration results. This is where our second contribu-
tion comes in. We provide an approach for selecting
a favorable subset of all possible transformation com-
binations that improve the accuracy of the subsequent
calibration algorithm.
Several critical factors that can influence the accu-
racy of hand-eye calibration have already been iden-
tified by Tsai and Lenz (Tsai and Lenz, 1989). They
referred to each robot pose as a "station." According
to their observations, accuracy is affected by the inter-
station rotation angle, the angle between different in-
terstation rotation axes, the distance between the cam-
era and the calibration board, the number of stations,
and the rotation and translation errors at each station.
They recommended using a larger number of stations
with significant variations in rotation angles to im-
prove accuracy. Additionally, they proposed a five-
station configuration to ensure that the stations are
uniformly distributed around the image frame. They
also demonstrated that the distance between the cam-
era and the calibration board, as well as the rotation
and translation errors at each station, have a linear ef-
fect on accuracy.
To estimate rotation and translation vectors, the
OpenCV (Bradski, 2000) ArUco pose estimation al-
gorithm is commonly used. (Oš
ˇ
cádal et al., 2020) in-
troduced a benchmark to assess the accuracy of pose
estimations. During their experiments, they found
that estimating the Z-axis of the board, which looks
perpendicularly away from the board surface, was
particularly error-prone, as small changes in the po-
sition of the board could cause significant shifts in the
Z-axis (Yaw). Additionally, they noted that the accu-
racy of roll estimation depends on the view angle of
the camera.
We take these findings about the connection be-
tween view setup and the resulting calibration accu-
racy into consideration in order to improve our data
quality. But our approach goes further by improv-
ing the calibration accuracy for a given dataset. Even
if not all parts of the dataset are desirable, our ap-
proach can still extract beneficial information from
it. This is achieved, among other things, by the
fact that our probabilistic method goes beyond sim-
ple pose rules. We call our method PrIcosa, because
of its Probabilistic nature and the utilization of the
Icosahedron shape.
2 METHODOLOGY
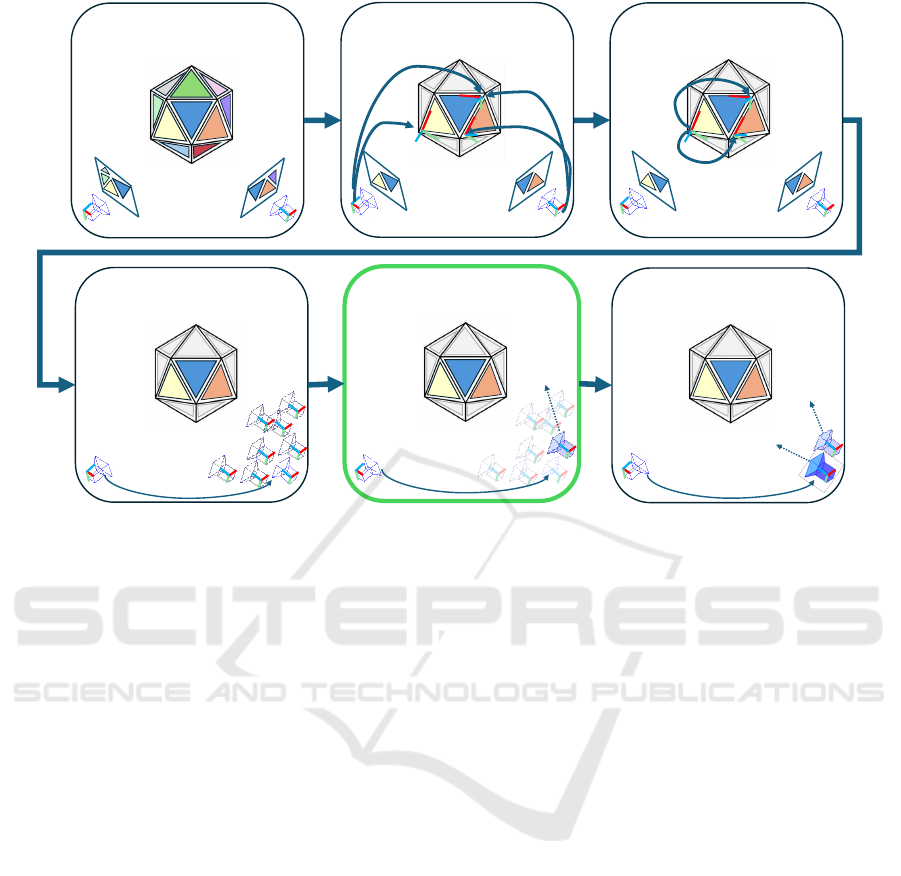
In this section, the complete pipeline (Figure 1) of
our multi-camera calibration framework PrIcosa is
described. It is a six-step process, starting with the in-
trinsic calibration and ending with bundle adjustment
for fine tuning.
2.1 Board Detection & Intrinsic
Calibration
The goal of intrinsic parameter calibration is to es-
tablish a correspondence between 3D points in the
real world and their corresponding 2D image projec-
tions. To initiate this calibration, we collect pairs of
correspondences between 3D points on the ChArUco
board pattern and their corresponding 2D image coor-
dinates from multiple images that contain these pat-
terns. These correspondences serve as the foundation
for initializing the intrinsic parameters of the camera,
represented by "K", as well as the distortion coeffi-
cient, represented by "dist". For perspective cameras,
we adopt the widely recognized calibration technique
outlined by Zhang (Zhang, 2000).
The procedure starts by selecting all available im-
ages to compute an initial estimation of the intrin-
sic parameters and distortion coefficients. However,
for certain views that exhibit significant errors due to
various factors, we introduced a filtering mechanism.
Views that display notable errors are systematically
excluded from further analysis, leaving behind a sub-
set of views that are deemed more reliable. This re-
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
802
Step 1: Board Detection
& Intrinsic Calibration
Step 3: Estimation of
Board Parameters
Step 5: Proposed Method to
Find the Best Initial Guess
Step 4: Initial Guesses for
Camera Extrinsic Parameters
Step 6: Bundle Adjustment to
Refine Extrinsic Parameters
Initial guess
Final Estimation
Initial guess
Step 2: Board Pose Estimation
& Outlier Pose Rejection
Figure 1: The complete pipeline of PrIcosa consists of 6 steps. Step 1: Each board is uniquely identified by its distinct
ChArUco markers, and intrinsic parameters are calculated after detection. Step 2: Camera-to-board projection is calculated
using intrinsic parameters and views with large re-projection error are rejected. Step 3: Transformation from master board
to slave boards are calculated. Step 4: Initial guess of master camera to slave camera
C
s
T
′
C
m
is calculated for all possible
equations. Step 5: Probabilistic method is applied to select the best initial guess of
C
s
T
′
C
m
. Step 6: Refinement of initial guess
and calculation of final estimation is performed using bundle adjustment.
fined set of views is then utilized to recalculate the
intrinsic parameters and distortion coefficients. This
process of refinement is performed iteratively, with
the recalculated parameters being obtained from the
filtered subset of images. The iterations continue un-
til the level of error reaches a predefined threshold of
improvement, essentially ensuring that the calibration
process converges to a stable solution.
2.2 Board Pose Estimation and Outlier
Rejection
Board pose estimation is the most crucial phase in
the multi-camera calibration process where the spatial
orientation and position of each camera in relation to
a calibrated reference board are determined. In this
step, we estimate the relative pose of all the cameras
for each observed board using the intrinsic parameters
that were calculated in the previous step. For esti-
mating the pose, we use the OpenCV implementation
of solvePnP iterative algorithm. In real-world scenar-
ios, noise and various factors can introduce errors in
the calibration process. To ensure the robustness and
reliability of the calibration results, we filter out the
poses that exhibit re-projection error beyond a certain
threshold of acceptance. These outlier poses are ex-
cluded from subsequent calibration steps.
2.3 Board Parameter Calculation
Our objective is to determine the relative poses be-
tween calibration boards to ultimately assemble them
into 3D objects. These 3D objects are composed of
multiple planar calibration boards. When a single im-
age captures two or more of these boards, it provides
an opportunity to estimate their relative poses, estab-
lishing pair-wise relationships. We collect measure-
ments from all images where pairs of boards are vis-
ible together and compute the average inter-board ro-
tation and translation. For this step, we followed the
procedure discussed in (Rameau et al., 2022).
2.4 Extrinsic Camera Parameter
Calculation
2.4.1 For Overlapping Cameras
When two cameras share an overlapping field of view
such that they see the same calibration pattern, then
the process of determining the transformation be-
PrIcosa: High-Precision 3D Camera Calibration with Non-Overlapping Field of Views
803
𝐵
1
a) Physical setup b) Connection graphs c) PDFs of transformations
Density
0 1
Known rigid 6DoF
transformation
Unknown rigid 6DoF
transformation
𝑐
1
(1)
(2)
(3)
(4)
(5)
(6)
𝑐
2
𝑐
1
𝑐
2
𝑐
3
𝑐
4
𝑐
5
𝑐
6
𝑐
1
𝑐
2
𝑐
1
𝐵
2
𝐵
3
𝐵
4
𝐵
5
𝐵
1
𝐵
3
𝑐
2
𝑐
2
𝑐
2
𝑐
2
𝑐
2
𝑐
1
𝑐
1
𝑐
1
𝑐
1
𝐵
1
𝐵
1
𝐵
4
𝐵
5
𝐵
2
𝐵
2
𝐵
2
𝐵
3
𝐵
4
𝐵
5
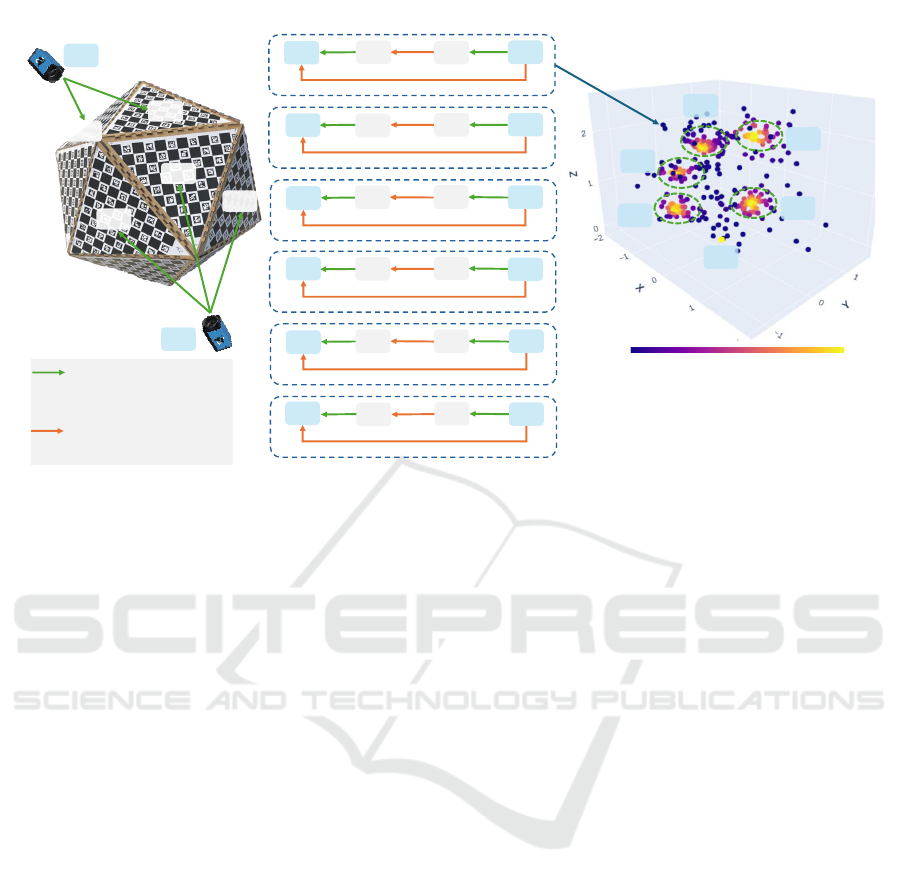
Figure 2: The physical setup of the calibration system, shown in a) with only two of the six cameras, can be represented
by connection graphs, which can be seen in b) and correspond to 6DoF rigid transformations. Most of the time, there are
multiple paths to create a closed chain of transformations between two cameras. The selection of this chain, or connection
graph, affects the quality of the camera calibration significantly. In c) every dot represents a camera position after choosing
one of the possible transformation chains. One probability density cluster for each of the six cameras is included in the
diagram. For each camera the transformation chain corresponding to the point in the cluster center is chosen to get the best
calibration results.
tween them becomes more straightforward. In this
particular phase, we have gathered all pairs of cam-
eras that possess a common field of view, and subse-
quently, we have employed the OpenCV stereoCali-
brate method to compute their spatial relationship.
2.4.2 For Non-Overlapping Cameras
When cameras do not have overlapping fields of view,
meaning they are not capturing the same scene si-
multaneously, then more sophisticated approaches are
necessary. In such cases, traditional calibration meth-
ods that rely on shared scene points between cam-
eras are not directly applicable. To address this chal-
lenge, we employ a hand-eye calibration approach.
We designate one camera as the master (reference)
camera and the others as slave cameras. The calibra-
tion boards viewed by the master camera are termed
master boards, while those captured by slave cam-
eras are called slave boards. In Figure 2, we illustrate
a situation where the camera C
1
captures boards B
1
and B
2
, and another camera C
2
captures the boards
B
3
, B
4
, and B
5
. In this setup, C
1
serves as the mas-
ter camera with B
1
and B
2
as master boards, while
C
2
is a slave camera with B
3
, B
4
, and B
5
as its slave
boards. Each calibration group follows the sequence:
slave_camera → slave_board → master_board →
master_camera. This configuration can be mathemat-
ically modeled using the equation AX = ZB, which
can be effectively solved using the hand-eye calibra-
tion method proposed by Tsai et al. (Tsai and Lenz,
1989).
However, it’s important to note that not all hand-
eye calibration groups have a diverse range of images
needed for accurate calibration. To address this limi-
tation, we have introduced an additional filtering tech-
nique to exclude irrelevant poses from these groups.
Initially, we gather all possible one-to-one pose com-
binations for hand-eye calibration. Then, we analyze
the rotation vectors associated with these poses. If
there is any pose angle that significantly deviates from
the others, the hand-eye calibration algorithm can en-
counter issues related to rotation normalization. To
address this issue, we have introduced a precaution-
ary measure to filter out problematic poses before
initiating the hand-eye calibration algorithm. In this
regard, we have employed the mean-shift clustering
algorithm (Carreira-Perpinán, 2015) to group similar
poses together. If any resulting cluster contains only
one pose element, we automatically discard that clus-
ter. Subsequently, we proceed to compute the hand-
eye calibration for the cameras with the remaining
poses.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
804
2.4.3 Probabilistic Method for Outlier Rejection
When dealing with multiple planar calibration ob-
jects, a single camera can capture different boards in
various frames, which introduces complexity to the
calibration system.
For the particular situation observed in Figure 2,
we observe six calibration groups and derive the fol-
lowing six equations (1)-(6) to compute the transfor-
mation from the camera C
2
to the camera C
1
(
C
1
T
C
2
).
These equations result in six different
C
1
T
′
C
2
transfor-
mations. In an ideal setting, all six of these transfor-
mations would align perfectly. However, in practical
scenarios, this is not the case.
B
1
T
C
1
C
1
T
′
C
2
=
B
1
T
B
3
B
3
T
C
2
(1)
B
1
T
C
1
C
1
T
′
C
2
=
B
1
T
B
4
B
4
T
C
2
(2)
B
1
T
C
1
C
1
T
′
C
2
=
B
1
T
B
5
B
5
T
C
2
(3)
B
2
T
C
1
C
1
T
′
C
2
=
B
2
T
B
3
B
3
T
C
2
(4)
B
2
T
C
1
C
1
T
′
C
2
=
B
2
T
B
4
B
4
T
C
2
(5)
B
2
T
C
1
C
1
T
′
C
2
=
B
2
T
B
5
B
5
T
C
2
(6)
In the next step, we calculate the probability den-
sity function (PDF) of these six
C
1
T
′
C
2
transforma-
tions. Among these possibilities, we select the trans-
formation that exhibits the highest probability as our
initial estimate. For calculating PDF, we use the
Gaussian Kernel Density Estimation method (W˛eglar-
czyk, 2018). The process is explained in Algorithm
1. It is important to note that this step applies to both
non-overlapping and overlapping scenarios.
2.5 Bundle Adjustment
In this phase, we refine all camera-to-camera and
board-to-board transformations to minimize the over-
all re-projection error using bundle adjustment. For
clarity, we denote the master camera as C
m
and slave
cameras as C
s
. The sets of master and slave boards
are represented as B
m
and B
s
, respectively.
We calculate the re-projection error for each of the
observed images. For instance, for pose ’p’ camera
C
s
observes board B
s
. For the same pose ’p’ master
camera C
m
observes board B
m
. Then we can calculate
the camera C
s
to board B
s
transformation as follows:
B
s
T
C
s
=
B
s
T
B
m
B
m
T
C
m
C
m
T
C
s
(7)
If camera C
s
(with intrinsic parameters K
s
) detects
N image points (x) on board B
s
at pose ’p’ and their
corresponding 3D points are X, the re-projection error
for that pose is:
Algorithm 1:
C
1
T
C
2
Calibration.
Input: Camera Intrinsics(2.1), Board Poses(2.2)
Output:
C
1
T
C
2
Total_Cameras ← C
1
, C
2
;
Total_Boards ← B
1
, B
2
, B
3
, B
4
, B
5
;
Master_Camera ← C
1
;
Master_Boards ← B
1
, B
2
;
Slave_Boards ← B
3
, B
4
, B
5
;
for B
m
in Master_Boards do
for B
s
in Slave_Boards do
C
1
T
C
2
,
B
m
T
B
s
←
cv2.calibrateRobotWorldHandEye(
B
m
T
C
1
,
B
s
T
C
2
);
rtmatrix ← Collect
C
1
T
C
2
;
tvecs ← Collect translation vectors from
C
1
T
C
2
;
end
end
density ← scipy.stats.gaussian_kde(tvecs);
max_idx ← argmax(density);
f inal
C
1
T
C
2
← rtmatrix[max _idx];
Re
p
=
s
1
N
N
∑
i=1
x
i
− K
s
C
s
T
B
s
X
i
2
(8)
Similarly, we calculate the re-projection errors for
all the images of all the cameras and take the average
to calculate the overall re-projection error.
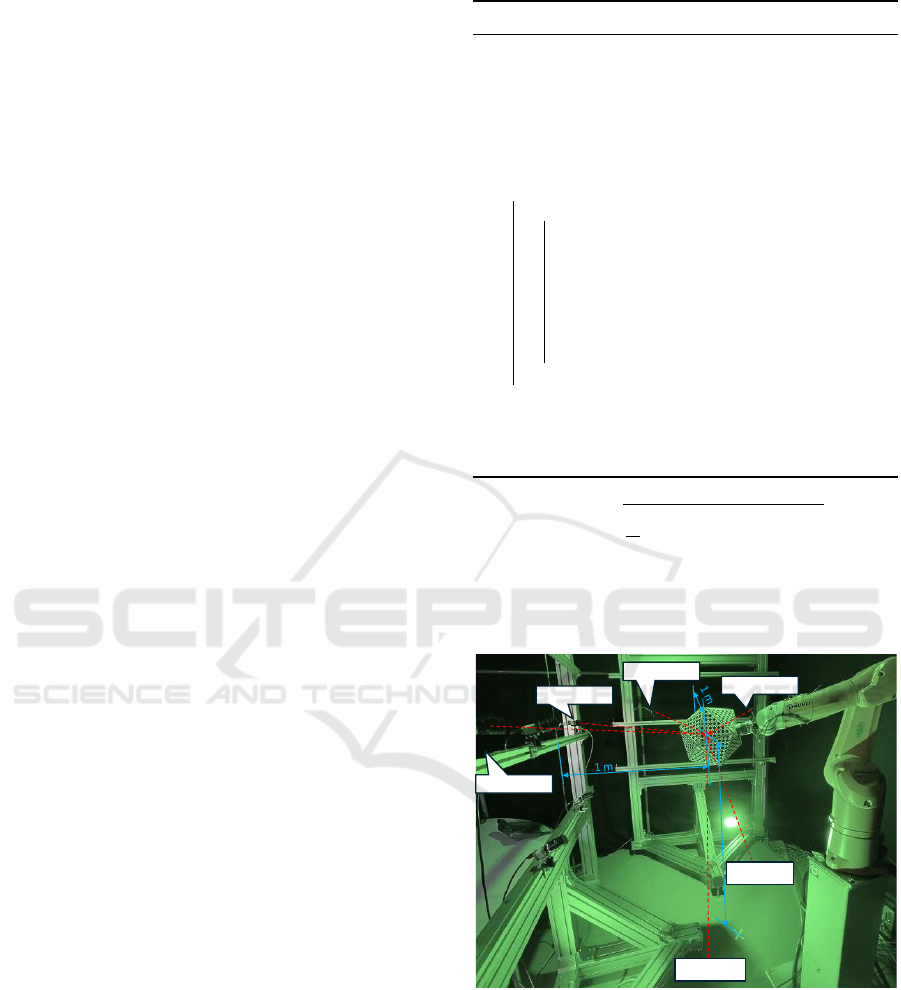
Cam-02
Cam-05
Cam-03
Cam-06
Cam-04
Cam-01
1 m
Figure 3: In our use case we have 6 cameras. The distance
between each consecutive camera is around 1 meter and the
distance between each camera pair baseline to the calibra-
tion object is also around 1 meter.
3 EVALUATION
We evaluate our results using two calibration objects:
an icosahedron and a cube. For both of the objects, we
use the same camera setup and robot gripper move-
PrIcosa: High-Precision 3D Camera Calibration with Non-Overlapping Field of Views
805

Figure 4: View angle variation for each camera. View angle is calculated from the camera to board projection matrix which
is derived from solvePnP algorithm. Then Euler angles (Roll, Pitch and Yaw) are calculated from that matrix. View angle =
∥Roll
2
+ Pitch
2
∥.
ments for image acquisition. In the following subsec-
tions, we compare the outcomes obtained from these
two calibration objects. We compare their differences
in the variation of the views, the coverage in the im-
age planes, and the resulting re-projection errors.
3.1 Experimental Setup
We utilize six 20MP monochrome industrial cam-
eras (DMK 33GX183 33G-Series from ’The Imaging
Source’) with 50 mm focal length. Each camera is
placed approximately 1 m away from the motion cen-
ter of the calibration object. The cameras are arranged
as stereo pairs with a baseline of 1 m. The camera
pairs each look at the calibration object from three
perpendicular directions, as shown in Figure 3.
The icosahedron is composed of equilateral trian-
gles with sides of 17 cm, and the cube has square faces
with sides of 220 cm. Both have the same ArUco
6x6_1000 pattern, where each square size is 13 mm.
To automatically move the calibration object to
different poses, we employ a Staubli TX2-60L robot.
The calibration object was mounted on the robot
gripper, and we used ROS1 Noetic (Open Source
Robotics Foundation, 2007) to control the robot and
MoveIt (Coleman et al., 2014) to plan the motions for
reaching the desired target poses with the calibration
object.
To move the object with the robot hand, we fol-
lowed a very simple motion plan. We moved the ob-
ject around the Z axis of the gripper by an Euler angle
of −280
◦
to 280
◦
. The dataset is available at (Nova
and Kedilioglu, 2024).
We adopted the "multical" (Batchelor, 2024)
GitHub repository as a baseline for our multi-camera
calibration system and implemented necessary mod-
ifications to address the specific challenges of non-
overlapping camera setups.
3.2 View Variation
To achieve robust intrinsic parameter calibration, it
is essential to ensure a wide variety of views for all
the cameras. Optimal performance appears to be ob-
tained when the angle between the image plane and
the pattern plane is around 45° (Zhang, 1999). Re-
garding camera extrinsic parameter calibration, par-
ticularly with the hand-eye calibration method, it is
equally important to gather a large number of views
with significant variation (Tsai and Lenz, 1989).
To calculate the angle between the image plane
and the pattern plane, we utilized the solvePnP algo-
rithm, which provides the transformation between the
camera and the board coordinates. This transforma-
tion results in a homogeneous matrix that we convert
into Euler form. This conversion yields three rota-
tion vectors: Roll, Pitch, and Yaw. Since the rotation
around the Z-axis (Yaw) shows limited variation in
pose, we exclude the yaw angle and instead focus on
the absolute values of the Roll and Pitch angles, which
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
806

Object Cam-1 Cam-2 Cam-3 Cam-4 Cam-5 Cam-6
Cube
Icosahedron
Figure 5: Image plane re-projection error after Bundle adjustment. It shows the average point error on a specific area of the
image plane.
we define as the ’view angle’. For other computer vi-
sion tasks the rotation around the optical axis (= Yaw)
is also not considered relevant (Mavrinac, 2012).
View angle = ∥Roll
2
+ Pitch
2
∥ (9)
The comparison between the two calibration ob-
jects concerning view angle variation is illustrated in
(Figure 4). Each bar in the plot represents the number
of views within a specific view angle range. The plot
clearly shows that images captured from the icosa-
hedron object exhibit greater pose variety than those
from the cube object. Additionally, it is noted that
camera-6 did not detect any points for the cube cali-
bration object, despite identical conditions for image
acquisition being maintained for both objects.
3.3 Coverage in Image Plane
Distortion mostly affects near the edges of the im-
age plane, so placing the calibration pattern near these
edges is crucial. Ensuring a wider coverage area al-
lows a more robust estimation of distortion parame-
ters.
Figure 5 shows a heat map of the re-projection er-
ror for all of the points present on the image plane
of each camera. This representation offers us a com-
prehensive insight into the extent of coverage of the
image plane.
The image clearly shows that the icosahedron ob-
ject achieves a larger coverage area with lower re-
projection error compared to the cube object.
3.4 Per View Re-Projection Error
Figure 6 displays the final re-projection error re-
sults. In this experiment, 20 images from each cam-
era were captured using the same robot motion and
camera setup. Each bar in the graph represents the
re-projection error for an individual image. The re-
sults clearly indicate that for all cameras, the overall
re-projection error when using the icosahedron ob-
ject is consistently below 1 pixel. In contrast, the
cube calibration object results in significantly higher
re-projection errors. This demonstrates the superior
accuracy and effectiveness of the icosahedron in cali-
brating the cameras.
3.5 Discussion
Throughout the experiments, we have highlighted the
importance of maintaining large variability in cam-
era poses for good-quality calibration. Figure 4 and
5 illustrate the superior coverage and view variation
achieved using the icosahedron compared to the cube,
and Figure 6 presents the resulting calibration results.
Despite the complexity of our camera setup, the
distinctive shape of the icosahedron enabled us to at-
tain the necessary view variety with minimal robot
motion. While it might be possible to replicate simi-
lar results with a cube, it would require more intricate
robot motions, which would need to be adjusted for
different camera setups. In industrial settings with an
increasing number of cameras, such adjustments be-
come increasingly challenging and time-consuming.
The icosahedron, therefore, offers an elegant and effi-
cient solution, streamlining the calibration process in
complex, multi-camera environments.
Even after meeting all calibration criteria, it is
possible that sometimes the final re-projection error
may still be high. This could occur if the bundle ad-
justment process converges at a local minimum. A
good initial guess can help prevent this issue, and
our probabilistic algorithm assists in selecting opti-
mal initial guesses. During the extrinsic parameter
PrIcosa: High-Precision 3D Camera Calibration with Non-Overlapping Field of Views
807
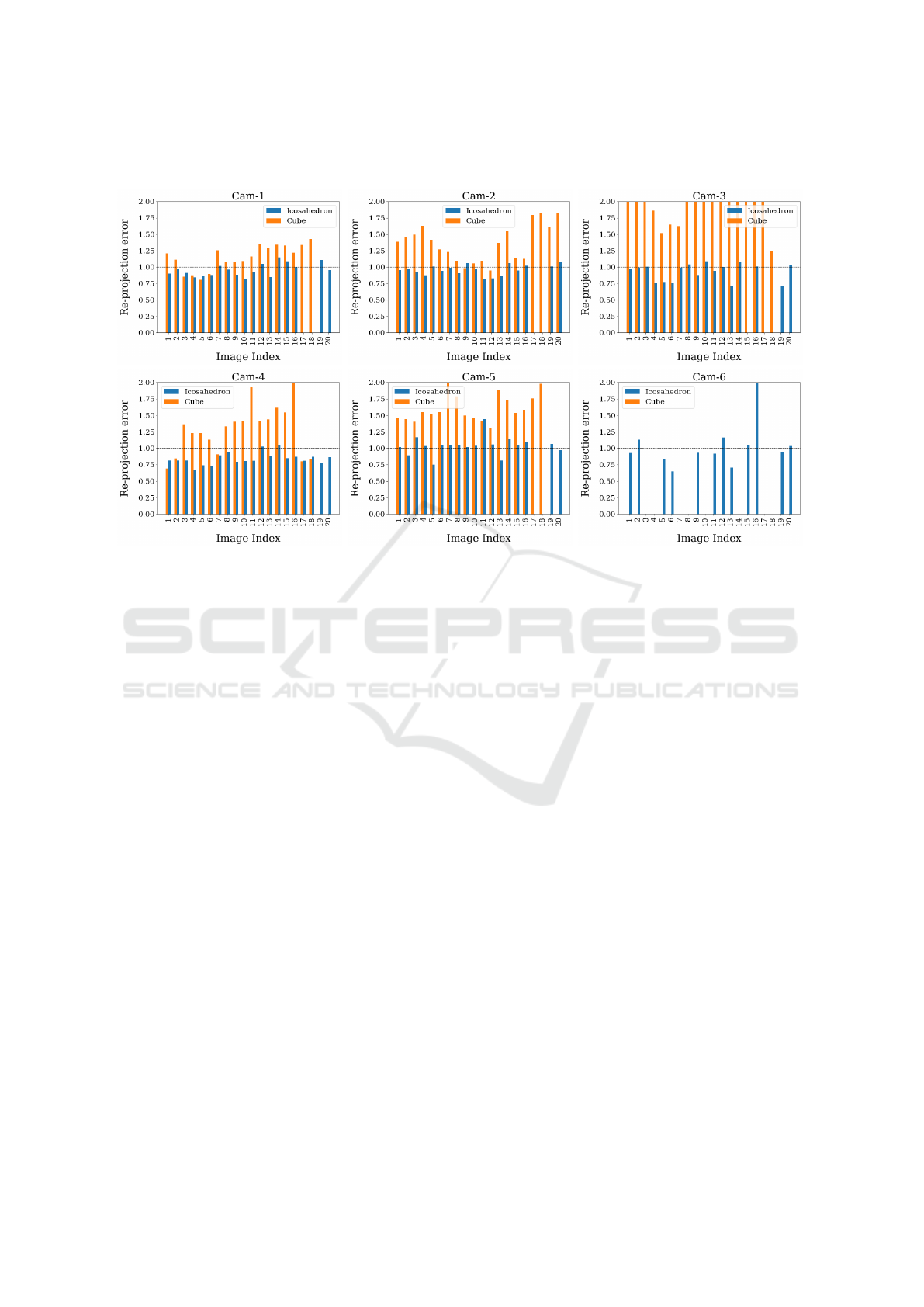
Figure 6: Per image re-projection error after bundle adjustment. One image consists of multiple views. Image re-projection
error is the average error of all views.
calibration, we observed that some calibration groups
were highly scattered. This scattering tends to occur
when a group has fewer images, limited variety, or
incorrect pose estimations. When using a calibration
object with a large number of boards, it becomes pos-
sible to create a large number of calibration groups,
which facilitates a more robust initial guess. For in-
stance, with the icosahedron object, we have around
100 groups for each camera pair. While some groups
are outliers, the inlier groups tend to cluster densely
around the center (Figure 2(c)), aiding in the selection
of initial parameters. In contrast, using the cube ob-
ject results in an average of only 4 groups per camera,
making it challenging to estimate a robust solution.
The structural advantage of the icosahedron, com-
bined with the probabilistic approach of our PrIcosa
framework, enables it to identify the optimal calibra-
tion group even from subpar datasets. For instance,
when analyzing the icosahedron datasets from cam-
eras 5 and 6, we observe that these cameras have lim-
ited view variation and image plane coverage (Figure
4 and 5). Despite these shortcomings, our framework
still manages to find the best solution within the poor
dataset (Figure 6).
4 CONCLUSIONS
We have shown that an icosahedron-shaped calibra-
tion object leads to considerably better calibration re-
sults than a cube-shaped calibration object for the
same set of views and calibration object poses. The
icosahedron represents a better balance between the
quantity and size of the boards. It provides signif-
icantly more variety in the dataset and better cover-
age of the image planes with useful patterns. This en-
ables smaller re-projection error values and improves
the calibration accuracy.
To get the most out of the acquired dataset, we
developed and evaluated a probabilistic method that
uses an optimized subset of possible input equations
for the optimization algorithms that are used to cal-
ibrate the cameras. By taking the cluster center of
all possible camera positions generated by the prob-
ability density function, we can minimize the re-
projection error in the calibration process.
Further research could consist of the exploration
of different calibration patterns. The localization of
the features of these patterns should be accurate and
robust. The patterns should also work in the case of
partial overlap. They should have a unique ID such
that each board can be identified in the images. Their
geometry should be able to handle sharp angles and
still be accurate enough. This would allow to increase
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
808

the pose variety in the dataset.
Another aspect that deserves further investigation
is the selection of the reference camera. Our cur-
rent implementation is time-consuming, mainly in the
bundle adjustment phase. This process involves se-
lecting each camera as the reference camera in turn
and performing the bundle adjustment repeatedly, re-
sulting in increased time requirements as the number
of cameras grows. A potential modification to address
this issue involves dynamically selecting the best ref-
erence camera by analyzing the observed views of
each camera. Our evaluation in the previous sec-
tion demonstrated that cameras with a substantial de-
gree of pose variability yield better results. There-
fore, automatically determining the reference camera
based on observed view characteristics could opti-
mize the calibration process, especially in scenarios
with a large number of cameras.
ACKNOWLEDGEMENTS
The project received funding from the German Fed-
eral Ministry of Education and Research under grant
agreement 05K22WEA / 05K22WO1 (AutoTron).
REFERENCES
Abedi, F., Yang, Y., and Liu, Q. (2018). Group geometric
calibration and rectification for circular multi-camera
imaging system. Opt. Express, 26(23):30596–30613.
An, G. H., Lee, S., Seo, M.-W., Yun, K., Cheong, W.-S., and
Kang, S.-J. (2018). Charuco board-based omnidirec-
tional camera calibration method. Electronics, 7(12).
Batchelor, O. (2024). multical. https://github.com/
oliver-batchelor/multical. GitHub repository.
Bradski, G. (2000). The opencv library. Dr. Dobb’s Jour-
nal: Software Tools for the Professional Programmer,
25(11):120–123.
Carreira-Perpinán, M. A. (2015). A review of mean-
shift algorithms for clustering. arXiv preprint
arXiv:1503.00687.
Coleman, D., Sucan, I., Chitta, S., and Correll, N. (2014).
Reducing the barrier to entry of complex robotic
software: a moveit! case study. arXiv preprint
arXiv:1404.3785.
D’Emilia, G. and Di Gasbarro, D. (2017). Review of tech-
niques for 2d camera calibration suitable for industrial
vision systems. In Journal of Physics: Conference Se-
ries, volume 841, page 012030. IOP Publishing.
Ha, H., Perdoch, M., Alismail, H., Kweon, I. S., and
Sheikh, Y. (2017). Deltille grids for geometric camera
calibration. In 2017 IEEE International Conference
on Computer Vision (ICCV), pages 5354–5362.
Li, B., Heng, L., Koser, K., and Pollefeys, M. (2013).
A multiple-camera system calibration toolbox using
a feature descriptor-based calibration pattern. In
2013 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems, pages 1301–1307.
Lv, Y., Feng, J., Li, Z., Liu, W., and Cao, J. (2015). A new
robust 2d camera calibration method using ransac.
Optik, 126(24):4910–4915.
Mavrinac, A. (2012). Modeling and optimizing the cover-
age of multi-camera systems.
Nova, T. T. (2024). Pricosa: High-precision 3d
camera calibration with non-overlapping field of
views. https://github.com/TabassumNova/Multi_
Camera_Calibration. GitHub repository.
Nova, T. T. and Kedilioglu, O. (2024). Non-Overlapping
Multi-Camera Calibration Dataset using Icosahedron
and Cube Calibration Object. https://doi.org/10.5281/
zenodo.13294455.
Open Source Robotics Foundation (2007). Robot operating
system (ros). https://www.ros.org. https://www.ros.
org.
Oš
ˇ
cádal, P., Heczko, D., Vysocký, A., Mlotek, J., Novák,
P., Virgala, I., Sukop, M., and Bobovský, Z. (2020).
Improved pose estimation of aruco tags using a novel
3d placement strategy. Sensors, 20(17).
Rameau, F., Park, J., Bailo, O., and Kweon, I. S. (2022).
Mc-calib: A generic and robust calibration toolbox for
multi-camera systems. Computer Vision and Image
Understanding, 217:103353.
Tabb, A. and Medeiros, H. (2019). Calibration of asyn-
chronous camera networks for object reconstruction
tasks. CoRR, abs/1903.06811.
Tsai, R. and Lenz, R. (1989). A new technique for fully au-
tonomous and efficient 3d robotics hand/eye calibra-
tion. IEEE Transactions on Robotics and Automation,
5(3):345–358.
W˛eglarczyk, S. (2018). Kernel density estimation and its
application. In ITM web of conferences, volume 23,
page 00037. EDP Sciences.
Zhang, Z. (1999). Flexible camera calibration by viewing a
plane from unknown orientations. In Proceedings of
the Seventh IEEE International Conference on Com-
puter Vision, volume 1, pages 666–673 vol.1.
Zhang, Z. (2000). A flexible new technique for camera cal-
ibration. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 22(11):1330–1334.
PrIcosa: High-Precision 3D Camera Calibration with Non-Overlapping Field of Views
809
