
D-LaMa: Depth Inpainting of Perspective-Occluded Environments
Simone M
¨
uller
1
, Willyam Sentosa
2
, Daniel Kolb
1
, Matthias M
¨
uller
3
and Dieter Kranzlm
¨
uller
2
1
Leibniz Supercomputing Centre, Garching near Munich, Germany
2
Ludwig-Maximilians-Universit
¨
at (LMU), M
¨
unchen, Germany
3
German Aerospace Center, Augsburg, Germany
Keywords:
D-LaMa, Depth Inpainting, Occlusion Problem.
Abstract:
Occlusion is a common problem in computer vision where backgrounds or objects are occluded by other ob-
jects in the foreground. Occlusion affects object recognition or tracking and influences scene understanding
with the associated depth estimation and spatial perception. To solve the associated problems and improve the
detection of areas, we propose a pre-trained image distortion model that allows us to incorporate new perspec-
tives within previously rendered point clouds. We investigate approaches in synthetically generated use cases:
Masking previously generated virtual images and depth images, removing and painting over a provided mask,
and the removal of objects from the scene. Our experimental results allow us to gain valuable insights into
fundamental problems of occlusion configurations and confirm the effectiveness of our approaches. Our re-
search findings serve as a guide to applying our model to real-life scenarios and ultimately solve the occlusion
problem.
1 INTRODUCTION
In numerous application fields, such as 3D model-
ing, mixed reality, autonomous vehicle systems, and
robotics, depth perception and the associated spatial
perception are essential for localization, navigation,
obstacle avoidance, and 3D mapping. For example, a
moving robot needs to understand the full geometry
of surrounding objects and scenes to make accurate
predictions and decisions. The ability to navigate and
interact in an environment requires depth perception
that considers occlusion, relative height, relative size,
perspective convergence, texture, and shadow gradi-
ents. Retrieving depth or geometry information from
a single image is a challenge owing to the loss of
depth that occurs when a 3D scene is projected onto a
2D image (Aharchi and Ait Kbir, 2020).
The problem of occlusion occurs when objects or
parts of objects are obscured from the view of cam-
eras or sensors by other elements in a scene (see
Fig. 1). This challenge affects numerous computer
vision tasks, including object recognition and detec-
tion, object tracking, scene understanding, and depth
estimation. The respective occlusions impede under-
standing the scene by preventing the accurate percep-
tion of spatial relationships between objects.
Original PCL I-PCL Back I-PCL
Figure 1: Rendered Point Cloud of 3D Scene with Occlu-
sion, Non-Occlusion and Reconstructed Background:
The original point cloud (PCL), on the left, contains white
areas which convey the occlusion problem. The center illus-
trates the result of the inpainted point cloud (I-PCL) recon-
structed using our D-LaMa model. The sofa can be hidden
by combining PCL and I-PCL. The reconstructed backside
is demonstrated on the right.
Considerable efforts have been made to solve the
occlusion problem and the resulting limitations in
computer vision. On account of their precision and
efficiency, neural networks such as Neural Rendering
Field (NeRF) are a popular approach. For example,
Müller, S., Sentosa, W., Kolb, D., Müller, M. and Kranzlmüller, D.
D-LaMa: Depth Inpainting of Perspective-Occluded Environments.
DOI: 10.5220/0013090000003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 3: VISAPP, pages
255-266
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
255

the NeRF model can be trained to learn the radiance
(color and opacity) at each point of a 3D scene. De-
spite the considerable success of this method, mul-
tiple images from different viewpoints are often re-
quired, and the model must be retrained for each new
presented scene. Additionally, the required training
process is regularly lengthy and complex (Mildenhall
et al., 2020; Munkberg et al., 2023).
An alternative approach utilizes neural-based gen-
eration of semantic segmented 3D scenes using the
image or depth map as input (Song et al., 2017). How-
ever, the color information is neglected since only the
geometry and segmentation class of the scene are used
for the rendering of the final 3D reconstruction. Sim-
ilar approaches have been proposed to complete the
3D scene without the segmentation class information.
But until now, these likewise do not consider the color
information (Firman et al., 2016).
A straightforward but also promising method for
the occlusion problem is image inpainting, where the
missing information within the image is masked and
filled in (Yu et al., 2019; Nazeri et al., 2019; Yan et al.,
2018). The mask content itself can be created from
the visual context of hidden regions by deriving the
color information from surrounding counterparts.
Fusing photogrammetry techniques, depth cam-
eras, and neural network models can lead to promis-
ing approaches for the reconstruction of hidden ge-
ometries within an image scene. Particularly the po-
tential of neural networks lends itself to the solution
of occlusions. The specific requirements for such
a model and related methods have yet to be deter-
mined. Therefore, our paper provides foundational
insight into the associated requirements, limitations,
and challenges to guide future research by providing
a workable strategy to solve the problem of complet-
ing occlusions by image inpainting using a neural net-
work model.
Our evaluation reveals the feasibility and transfer-
ability of our novel D-LaMa Model for reconstruct-
ing perspective-occluded environments, where a pre-
trained deep learning-based image inpainting model
is utilized. Our findings extend research on the bene-
fits of depth inpainting and contain the following ma-
jor contributions:
• D-LaMa model for the completion of occluded
surfaces and object-hidded backgrounds in point
clouds
• Evaluation of depth image similarity by metrics of
SSIM, LPIPS, and MSE for
– Removal Virtual Projected Inpainting (VPI)
– Object Removal Inpainting (ORI)
– Stereoscopic Image Inpainting (SII)
Our results show the effectiveness of the D-LaMa
model on the occlusion problem through practical ap-
plications. In VPI, we reveal problems caused by the
properties of point clouds and lack of real-world at-
tributes, such as reflections. In ORI, we refer to the
effects on model results due to mask expansion during
the inpainting process. Adverse artifacts occurred es-
pecially when the mask did not completely cover the
object. The SII demonstrates remarkable proficiency
in inpainting 3D point clouds within a stereoscopic
setup. We identified an incoherence of the estimated
depth image caused by the separate inpainting of the
left and right images.
Our empirical examination is based on syntheti-
cally generated data from Unreal Engine. By opt-
ing for synthetic over real-world data, a better un-
derstanding of the challenges and influencing factors
of our approaches in a controlled environment is en-
sured.
2 OCCLUSION HANDLING IN
COMPUTER VISION
Over the last decade, significant research has been
conducted in the field of computer vision to construct
and render increasingly detailed 3D scenes. The chal-
lenges for reconstructing individual objects and over-
coming data gaps are caused not only by occlusion
but also by sensor and hardware limitations as well as
the resulting noise (M
¨
uller, S., and Kranzlm
¨
uller, D.,
2021; M
¨
uller, S., and Kranzlm
¨
uller, D., 2022).
The completion of object shapes in 3D reconstruc-
tion research has evolved from early interpolation
(Edelsbrunner and M
¨
ucke, 1994; Bajaj et al., 1995;
Chen and Medioni, 1995; Curless and Levoy, 1996;
Amenta et al., 1998; Bernardini et al., 1999; Davis
et al., 2002) and energy minimization (Sorkine and
Cohen-Or, 2004; Kazhdan et al., 2006; Nealen et al.,
2006) techniques to data-driven approaches leverag-
ing symmetry (Pauly et al., 2008; Sipiran et al., 2014;
Sung et al., 2015) and databases for geometric priors
(Pauly et al., 2005; Shen et al., 2012; Li et al., 2015;
Rock et al., 2015; Li et al., 2016).
With the advancement of neural networks, vari-
ous 3D data representations such as voxels (Yan et al.,
2016; Girdhar et al., 2016; Tatarchenko et al., 2017;
Wu et al., 2016; Brock et al., 2016), point clouds (Fan
et al., 2017; Yang et al., 2018; Lin et al., 2018; In-
safutdinov and Dosovitskiy, 2018; Achlioptas et al.,
2018), meshes (Groueix et al., 2018; Wang et al.,
2018a; Chen and Zhang, 2019), implicit function
representation (Park et al., 2019; Chen and Zhang,
2019; Mescheder et al., 2019; Peng et al., 2020), and
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
256

structure-based representation (Zou et al., 2017; Li
et al., 2017; Wu et al., 2020) have been explored to
handle the object completion task.
Despite the promising results, challenges, such as
low resolution of voxels, lack of geometric details
in structure-based representations, complex learning
processes for neural networks in point clouds and
mesh topology, as well as additional post-processing
stages for implicit representations still remain. Their
applicability for dealing with occlusions within a 3D
scene is limited, as additional processes are required
to identify and generate the complete geometry for
each object, resulting in a high computational cost.
Multiple studies recognized missing regions in a
3D scene as part of the task of scene completion. The
proposed methods behind these studies use neural net-
works to learn the complete scene geometry through
voxel data representation (Song et al., 2017; Chen
et al., 2019; Firman et al., 2016; Dai et al., 2018).
However, the inclusion of color information is often
neglected, resulting in a lack of visual fidelity. To
overcome this limitation, further research has been
conducted that utilizes the image inpainting approach
by considering color and depth information for an
effective scene completion with stereoscopic setup
characteristics (Wang et al., 2008; Hervieu et al.,
2010). A single view (He et al., 2011; Doria and
Radke, 2012) is used to remove or inpaint occluding
objects and to complete the occluded background re-
gion. Since these approaches rely on traditional in-
painting methods with explicit mathematical opera-
tions and do not incorporate neural networks, they are
computationally expensive and often exhibit an infe-
rior quality.
In the field of novel view synthesis, research
has been conducted to generate or render images
from new perspectives. One popular approach uti-
lizes NeRF to achieve realistic renderings of complex
scenes (Mildenhall et al., 2021; Reiser et al., 2021;
M
¨
uller et al., 2022; Rosinol et al., 2023). However,
this method requires sophisticated hardware and re-
quires complex post-processing steps to retrieve the
final scene as a 3D model. Other alternatives, such as
3D warping methods acknowledging the above limi-
tations offer straightforward options that are easier to
implement. For instance, depth information can be
used to render novel view images from a new view-
point (Mark et al., 1997; Li et al., 2013; Li et al.,
2018; Mori et al., 2009; Yao et al., 2019; Huang and
Huang, 2020). Moreover, the concept of 3D warp-
ing combined with traditional image inpainting can
be employed to fill in the holes in the novel view
(Mori et al., 2009; Huang and Huang, 2020; Yao
et al., 2019). Despite its promising conceptualiza-
tion, the utilization of multiple initial viewpoints from
the same scene limits the applicability of a generated
scene, where only a single viewpoint is used.
Traditional methods of completing missing re-
gions in 3D scenes are computationally expensive and
often yield suboptimal results. The inclusion of neu-
ral networks shows promising results, but is often lim-
ited by neglected color information, leading to unre-
alistic 3D reconstructions. This behavior is noticeable
in the novel view synthesis task, where the learning-
based approach excels in quality but is complex. The
utilization of multiple initial viewpoints is required to
solve the novel view synthesis task in general. De-
spite this, the use of inpainting emerges as a promis-
ing solution to bridge this gap.
By applying the inpainting process to both color
and depth images, we can effectively address the oc-
clusion problem. However, relying solely on tra-
ditional inpainting methods without neural networks
will result in inferior performance. In contrast to the
previous approaches, our approach utilizes the sim-
plicity of inpainting methods as well as the capability
of neural network models to solve the problem of oc-
clusion completeness.
3 DEPTH BASED
LaMa-Architecture
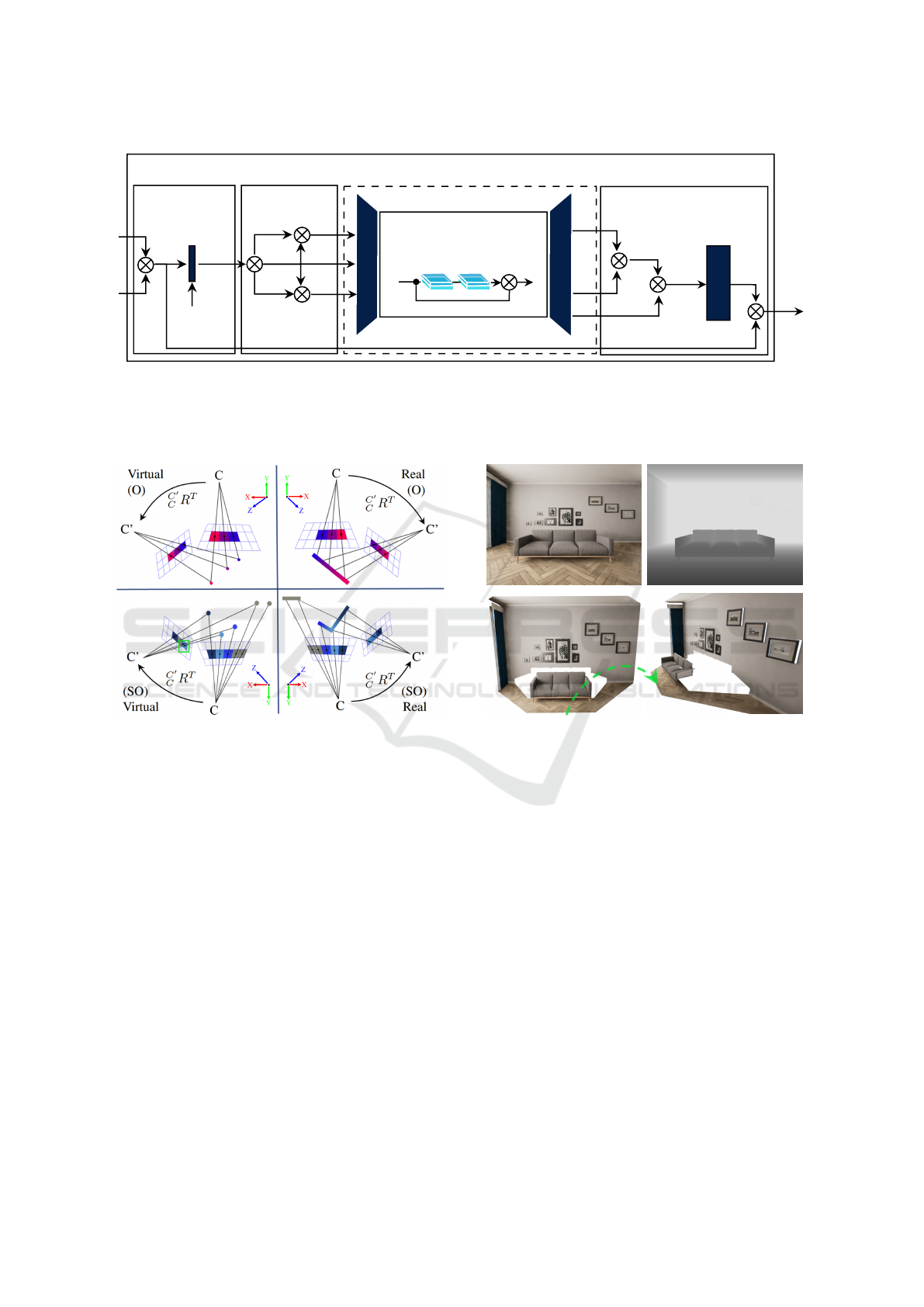
Our concept (see Fig. 2) centers on the LaMa in-
painting model (Suvorov et al., 2022), which uses ad-
vanced algorithms and neural network architectures
to fill in missing or damaged parts in images.
3.1 Virtual Repositioning of Point
Cloud
The first step of our Depth-based Large Mask Inpaint-
ing Architecture (D-LaMa) is the repositioning of ren-
dered point clouds ∇p to identify spatially occluded
surfaces. We achieve a virtually repositioned point
cloud ∇p
′
by changing the perspective view of the
original point cloud ∇p, as shown in Fig. 3.
The four areas in Fig. 3 describe the optimal (O)
and suboptimal (SO) cases of environmental projec-
tion. The structures of the physical scenes (top and
bottom right) can be assigned explicitly to each pixel.
In contrast, virtual projections of point clouds can
contain pixels that are assigned to several environ-
mental points in a suboptimal case. This single-point
cloud indicates properties that favor the occlusion
problem. By repositioning the point cloud, we obtain
further information about existing occlusions, over-
D-LaMa: Depth Inpainting of Perspective-Occluded Environments
257
M
Depth-based Large Mask Inpainting (D-LaMa)
Inpainting Network f
θ
3×
9×
Fast Fourier Convolution
Residual Block
FFC
FFC
3×
∇p
i
λ
i
I
i
λ
I
n
n+1
∇p
(R|T )
∇p
′
I
′
λ
′
λ
′′
I
′′
∇p
′
i
-
M
Re-Shift
Reconstruction
λ-Masking
Repositioning
∇p
∇p
′′
i
∇p
c
Figure 2: Pipeline of Depth based LaMa-Architecture (D-LaMa): The architecture consists of 4 components: In Reposi-
tioning, a new virtual point cloud is reprojected from a different perspective. λ-Masking generates a virtual projected mask by
positional change of perspective. The network inpaints the masked disparity map and image in order to derive the occluded
surface. By reconstructing the position and combining the inpainted point cloud (I-PCL) with the previous point cloud (PCL),
a complete scene without occlusion can be reconstructed.
Figure 3: Virtual and Real Projected Cases: Optimal case
(O): a virtual projection determines the same depth dis-
tances as a real, positionally unchanged projection. Sub-
optimal case (SO): several 3D points are contained in one
pixel as depth information.
lapping textures, and colors. The positional change of
∇p from C to C
′
, described by Eq. 1, helps to achieve
an unambiguous assignment.
∇p
′
(I
′
,λ
′
)
:= ∇p
(I,λ)
· (
C
′
C
R
T
T ) (1)
The image [I]
n
n+1
and disparity map λ form a 4-
channel configuration which can be used to extract a
point cloud P(∇p) := P(I, λ). Thereby, the Image no-
tation [I]
n
n+1
is utilized to generalize the scene recon-
struction process, typically involving multiple images
for depth estimation. We generate a virtual replica-
tion ∇p
′
of ∇p from a new perspective (see Fig. 3 and
Fig. 4).
The expected results of point cloud repositioning
are shown in Fig. 4. We employ (R | T ) as a param-
eter for the intrinsic camera pose matrix in order to
transform the position of the original camera C to the
(R|T )
[I]
n
n+1
λ
∇p
′
∇p
Figure 4: Point Cloud Repositioning: The point cloud ∇p
can be extracted from the original image [I]
n
n+1
and dispar-
ity map λ. A new perspective virtual point cloud ∇p
′
can be
generated by translational and rotational shift (R|T ) of ∇p.
virtual camera C
′
position.
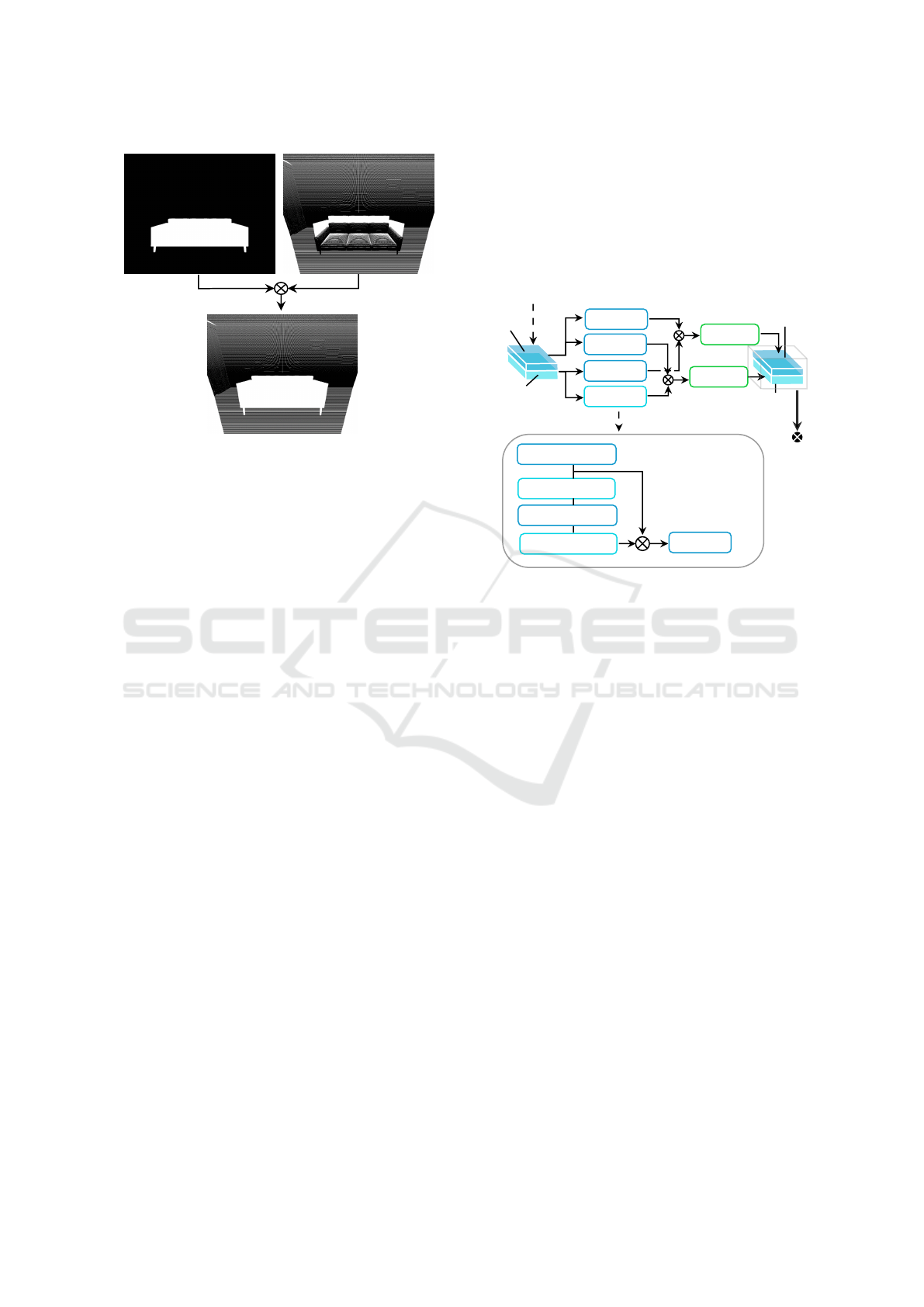
3.2 λ-Masking
The inpainting mask M plays a pivotal role in image
processing, particularly in the inpainting domain. We
construct a binary or greyscale image from the areas
of the original image. While the pixels to be painted
over are assigned the value 1, the value 0 represents
untouched areas. A mask, as illustrated in Fig. 5,
serves as a guide and instructs the inpainting algo-
rithms to selectively focus their efforts and ensure pre-
cise application of the inpainting process.
The mask M
0
, if provided e.g. by user input or
object recognition and segmentation, enables the re-
moval of objects by the inpainting process. This mask
forms a general case with no positional change where
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
258
M
λ
M
0
M
τ
M
λ
Figure 5: Mask Generation: M
0
illustrates a mask derived
from the original image position. M
τ
shows a virtual pro-
jected mask by positional change of perspective. M
λ
results
by combining M
0
and M
τ
.
the image pixel will be inpainted and assigned to the
value 1. We apply the positionally changed point
cloud ∇p
′
in a 3D to 2D projection-based function:
P(∇p
′
) := P
′
(I
′
, λ
′
, M
τ
) (2)
We can derive positionally changed image I
′
, dispar-
ity map λ
′
and the corresponding virtual projected
mask M
τ
. In the case of M
0
being provided, we can
readily derive M
λ
, where the object of interest is in-
painted over by applying the following function:
P(I
′
λ
, λ
′
λ
, M
λ
) := (∇p
′
(I
′
,λ
′
)
∧ M
0
) (3)
P(M
λ
) := (M
τ
∧ M
0
) (4)
Due to imperfect masking, where the mask does not
cover the object or occlusion region completely, the
integration of morphological operations, especially
dilation and erosion, into image processing can re-
duce the degree of incomplete coverage. These oper-
ations, commonly used in tandem, dynamically alter
the shape and size of the missing area. Dilation, serv-
ing as an expansive force, collaborates with a speci-
fied kernel to augment disjointed regions within the
mask, facilitating a seamless transition between in-
painted and non-inpainted areas. Conversely, erosion,
functioning as a refining force, contracts the bound-
aries of the mask, confining the region designated for
inpainting. The D-LaMa model exploits the synergy
between dilation and erosion within morphological
processing, which refines the inpainting mask.
3.3 Inpainting Network
Our concept employs the receptive field of a three-
layer 2D convolutional network. The receptive field
itself influences specific neurons of a network unit to
produce specific features. As data traverses the net-
work layers, the receptive field of neurons in deeper
layers expands, encompassing information from a
broader input data region. In Fig. 6 we illustrate the
inpainting network of D-LaMa based on Fast Fourier
Convolution (FFC).
Global
Local
Fast Fourier Convolution (FFC)
Conv 3×3
Conv 3×3
Conv 3×3
ST
Conv-BN-ReLU
Spectral Transform
(ST)
Real FFT2d
Conv-BN-ReLU
Inv Real FFT2d
Conv 1×1
BN-ReLU
BN-ReLU
Global
Local
Figure 6: Architecture of Fast Fourier Convolution
(FFC) and Spectral Transform (ST) (Suvorov et al.,
2022): The architecture contains local and global parts con-
sisting of 3×3 convolution kernel and spectral transform.
FFC (Heusel et al., 2017; Suvorov et al., 2022)
uses channel-wise Fast Fourier Transformation in a
comprehensive image-wide receptive field consisting
of global and local convolution kernels. By integrat-
ing the global context, the inadequacies of smaller
convolution kernels (3×3) can be compensated. The
D-LaMa model processes an input image and a mask
as a combined 4-channel tensor and generates the fi-
nal 3-channel RGB image through a fully convoluted
approach.
Loss Function. Deliberate and systematic strategies
are used to integrate a range of loss functions. Each
loss function has a specific role in improving the over-
all performance of the model.
High Receptive Field Perceptual Loss. The D-
LaMa model incorporates the so-called High Recep-
tive Field Perceptual Loss (HRF PL), which utilizes a
base model φ
HRF
(·). The HRF PL between the input
image x and the resulting inpainted image ˆx is formu-
lated as follows:
L
HRFPL
(x, ˆx) = M ([φ
HRF
(x) − φ
HRF
ˆx]
2
) (5)
Eq. 5 signifies an element-wise operation with M as a
sequential two-stage mean operation (interlayer mean
of intra-layer means). φ
HRF
(x) can be implemented
using Fourier or Dilated convolutions.
D-LaMa: Depth Inpainting of Perspective-Occluded Environments
259

Adversarial Loss. The adversarial loss ensures that
the LaMa model f
θ
(x
′
) generates local details that ap-
pear natural. A discriminator D
ξ
(·) operates at a local
patch level (Isola et al., 2017), distinguishing between
“real” and “fake” patches. The non-saturating adver-
sarial loss is defined as:
L
D
= −E
x
[logD
ξ
(x)] − E
x,m
[logD
ξ
( ˆx) ⊙ m]
−E
x,m
[log(1 − D
ξ
( ˆx)) ⊙ (1 − m)] (6)
L
G
= −E
x,m
[logD
ξ
( ˆx)] (7)
L
Adv
= sg
θ
(L
D
) + sg
ξ
(L
G
) → min
θ,ξ
(8)
x represents a sample from a dataset, m is a syntheti-
cally generated mask, ˆx = f
θ
(x
′
) is the inpainting re-
sult for x
′
= stack(x ⊙ m, m), the stops gradients oper-
ator sg
var
with respect to the variable var, and L
Adv
,
which stands for the combined loss used for optimiza-
tion.
Final Loss Function. The LaMa model additionally
utilizes loss functions by R
1
= E
x
∥∇D
ξ
(x)∥
2
for gra-
dient penalty as proposed by (Mescheder et al., 2018;
Ross and Doshi-Velez, 2018; Esser et al., 2021), and a
discriminator-based perceptual loss, or feature match-
ing loss, denoted as L
DiscPL
(Wang et al., 2018b).
L
DiscPL
stabilizes training and occasionally improves
performance slightly. The final loss function L
f inal
for the LaMa inpainting model can therefore be de-
noted as the weighted sum of the previously men-
tioned losses.
L
f inal
= κL
Adv
+ αL
HRFPL
+ βL
DiscPL
+ γR
1
(9)
L
Adv
and L
DiscPL
contribute to the generation of nat-
urally looking local details, while L
HRFPL
ensures
the supervised signal and consistency of the global
structure. In our experiments, the hyperparameters
(κ, α, β, γ) are determined via the coordinate-wise
beam-search strategy, resulting in the weight values
κ = 10, α = 30, β = 100, and γ = 0.001 (Suvorov
et al., 2022).
Previous work evaluated LaMa variants contain-
ing a ResNet-like architecture (He et al., 2016), con-
sisting of three downsampling blocks, 6-18 residual
blocks with integrated FFC, and three upsampling
blocks. We use a “Big LaMa” variant, which em-
ploys eight residual blocks and is trained exclusively
on low-resolution 256 × 256 crops extracted from ap-
proximately 512 × 512 images. The used variant of
this paper is trained on eight NVIDIA V100 GPUs for
approximately 240 hours (Suvorov et al., 2022).
3.4 Reconstruction
The reconstruction defines the part of the D-LaMa
model in which the point cloud is perspectively re-
built and re-occluded to complete scenes with objects
or to hide objects and reconstruct backgrounds. Fig. 7
illustrates the different variants of the scene that can
be reconstructed by combining I-PCL and PCL.
∇p
c−
∇p
mb
∇p
′′
i
= p
′
i
· (
C
′
C
R
T
T )
T
∇p
c+
Figure 7: Reconstruction of Inpainted Point Cloud (I-
PCL): Top left shows the re-occluded background of the
inpainted point cloud ∇p
′′
i
generated by the D-LaMa model.
The point cloud of the entire scene ∇p
′′
i
can be recon-
structed as an occlusion-free point cloud ∇p
c+
or an
occlusion-free point cloud with hidden object ∇p
c−
.
As a result of D-LaMa, we receive the re-occluded
mask of point cloud ∇p
′′
i
. By adding ∇p
′′
i
to the orig-
inal point cloud ∇p, we can isolate the inpainted re-
gions and reconstruct the complete point cloud ∇p
c+
.
∇p
c+
= ∇p
(I,λ)
+ ∇p
′′
(I
′′
,λ
′′
)
(10)
∇p
c−
= (∇p
(I,λ)
∧ M
0
) + ∇p
′′
(I
′′
,λ
′′
)
(11)
In turn, we can hide the object and fill the occluded
background area by subtracting ∇p
′′
i
from ∇p.
4 EXPERIMENTAL DESIGN
Data and Metrics. In our experiments, we use syn-
thetically generated data from Unreal Engine 4.27
1
to simulate a real-world outdoor environment. The
dataset includes images and object masks in .png and
depth information in .exr format with 512x512 px res-
olution, generated with the easySynth library (Ydrive,
2022). We used the Downtown West Modular Pack
example project by Pure Polygons (Polygons, 2020)
to replicate a natural outdoor environment scene. Two
distinct datasets were generated from the scenes: One
where the object of interest is present and one with
the object removed.
We conducted a thorough data selection and post-
processing phase to ensure both a diverse environ-
1
https://www.unrealengine.com
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
260

10° 20° 30° 40° 50° 60°
GT
∇p
′
∇p
c
10°
Figure 8: Results of a Rotated Virtual Projection: Based on the colored image at top left, the image and the corresponding
point cloud are rotated by 10 degrees each. At the top is the ground truth (GT). In the middle is the virtual point cloud ∇p
′
with occlusion (visible as a white shadow). Below is the complete scene with fixed occlusion as a ∇p
c
.
ment as well as compliance with the experiment re-
quirements. These include depth image conversion,
where the depth information is converted to a depth
image (by normalizing and limiting the depth to ten
meters), and mask enhancement, where the object
mask is represented as black-and-white image com-
posite without unwanted artifacts and noise. We used
the Python libraries OpenCV (Bradski, 2000), Ten-
sorFlow (Developers, 2023), PyTorch (Paszke et al.,
2019), and TensorLightning (AI, 2015) for the in-
painting process, and Open3D (Zhou et al., 2018) to
facilitate visualizing the results.
To assess our empirical experiment, we follow the
established practice in image2image literature by us-
ing the image similarity metrics Structural Similar-
ity Index (SSIM) (Wang et al., 2003; Wang et al.,
2004), Learned Perceptual Image Patch Similarity
(LPIPS) (Zhang et al., 2018), and Mean Squared Er-
ror (MSE). The values of SSIM and LPIPS range from
0 to 1. A higher SSIM score implies a higher simi-
larity between two images, while higher LPIPS and
MSE scores signify greater differences. Python li-
braries, such as scikit-image (scikit image.org, 2022)
are used to assess the SSIM and MSE metrics, while
the LPIPS metric is assessed using the library pro-
vided by (Zhang et al., 2018).
Evaluation. Our approach involves creating a point
cloud from the original viewpoint and projecting it
back from a new perspective. However, due to the
discrete nature of point clouds and the lack of phys-
ical properties in the point clouds, the resulting pro-
jection may deviate from the actual 3D scene. Conse-
quently, projecting the original point cloud onto new
viewpoints may result in different virtual image pro-
jections, where the occluded region is exposed and
represented as a void in the new virtual image. Ac-
knowledging this limitation, we evaluate the missing
region ratio and the inpainted results on positionally
changed image I
′
, the depth image λ
′
on the cor-
responding virtual projected mask M
τ
via rotational
transformation by comparing them with the ground
truth images taken from the actual viewpoints. In this
case, we consider the general case of our approach,
where the object mask is not yet used.
The rotational values defined in the experiment are
10, 20, 30, 40, 50, and 60 degrees to the left and right
(±), where we transform our initial point cloud by ro-
tating it about the Y-axis (Yaw) with a defined cen-
troid 250 cm from the camera center along the Z-axis.
In addition to the evaluation of inpainted results in
general case, we evaluate the effect of object mask
M
τ
in the process.
5 RESULTS
Larger rotation values result in larger missing or oc-
cluded areas in the virtual image and depth image,
which are treated as the inpainting mask. By rotating
the point cloud and projecting it with a larger rotation
value, we further expose missing fields of view, re-
sulting in larger missing areas on each side of the vir-
tual image and depth image. Additionally, the miss-
ing areas are compounded by the missing pixel values
caused by the occlusion of the foreground object as
well as by rounding errors (around 1 px in size) dur-
ing the point cloud re-projection process.
By comparing the inpainting result on the virtual
image and depth image (see Tables 1 and 2) we dis-
cover that the D-LaMa inpainting model performance
degrades as the mask area to be inpainted increases.
D-LaMa: Depth Inpainting of Perspective-Occluded Environments
261

Table 1: Inpainting Result of Virtual Image for Select
Rotations: The results refer to Fig. 8 and compares the im-
ages by different similarity metrics.
Rot. Mask Ratio SSIM LPIPS MSE
±60 68.96 0.4559 0.5651 3284.25
±50 64.87 0.4873 0.5221 2871.92
±40 59.49 0.5292 0.4752 2337.43
±30 52.42 0.5839 0.4035 1657.52
±20 42.37 0.6593 0.3134 1065.91
±10 27.19 0.7617 0.1859 522.05
In most cases, the suboptimal inpainting result
is caused by the incapability of the D-Lama model to
correctly inpaint the area if multiple distinct objects
are present around the missing area. In this case,
the D-LaMa model attempts to inpaint the missing
area by blending the surrounding objects, resulting in
erroneous color and depth information. Additionally,
due to anti-aliasing, the resulting virtual image may
also be erroneous, particularly around the object
edges, since this area contains wrong depth informa-
tion. This frequently happens in real-world scenarios
if the depth information is widely erroneous. Since
a straightforward method is used to project the
point cloud into the virtual image plane, incorrect
pixel values may be assigned to the resulting virtual
image and depth image if points that should be
obscured from a new viewpoint are exposed. This
can contribute to non-optimal inpainting results.
Based on these findings, we conducted a further
experiment where an object mask filters the point
cloud so that the resulting virtual image and depth
image exclude the occlusion directly. This leads to
significantly improved inpainting performance if the
foreground object is completely removed from the
virtual image and depth image. By slightly dilating
the mask (e.g., by 3px) proper coverage of the oc-
clusion area can be ensured. To address the round-
ing error during the point cloud re-projection process
and incorrect pixel value assignment in occluded ar-
eas, one can, for example, include a translation pa-
rameter to zoom out the projection result. A denser
point cloud projection can eliminate undefined pixel
values or determine and correct missing or incorrect
pixel values based on their neighboring pixel value
information.
As the number of input and output channels of the
D-LaMa model is limited to three (RGB), the inpaint-
ing processes of the virtual image and depth image
need to be performed separately. This may result in
offsets between the virtual and depth image inpainting
results. Moreover, the inpainting results of the virtual
depth images may deviate slightly along their chan-
nels. However, due to the small size of the deviation,
Table 2: Inpainting Result of Virtual Depth Image for
Select Rotations: The results refer to Fig. 8 and compare
the depth maps by different similarity metrics.
Rot. Mask Ratio SSIM LPIPS MSE
±60 68.96 0.8506 0.3091 1452.72
±50 64.87 0.8648 0.2727 1074.61
±40 59.49 0.8680 0.2640 868.91
±30 52.42 0.8712 0.2523 657.17
±20 42.37 0.8847 0.2195 393.29
±10 27.19 0.9016 0.1850 186.54
this outcome can readily be improved by converting
the inpainted depth image into a grayscale image.
6 DISCUSSION
Virtual Projected Inpainting. The use of virtual
camera projections for inpainting reveals problems
caused by the properties of point clouds and their
omission of real-world attributes, such as reflections.
Consequently, scenes with complicated geometry and
reflective objects as well as strict point cloud trans-
formations can degrade the results. Inpainting mod-
els with a fixed input and output size can lead to ad-
ditional limitations. For real-world applications with
pixel-by-pixel misalignment, our results highlight the
importance of extending the mask to ensure precise
coverage of the occlusal region. This provides valu-
able insight to improve occlusion completion in com-
plex scenarios with misaligned depth and color im-
ages.
Object Removal Inpainting. The final result for
color and depth inpainting for a given object mask
is significantly impacted if the mask does not cover
the entire object. Our results reveal that the extraction
of occluding objects and subsequent 3D scene recon-
struction leads to artifacts related to real-world fea-
tures such as cast shadows. The persistent shadow of
an object that has already been removed can affect re-
alism. Therefore, it could be necessary to reconstruct
cast shadows to improve the result.
Stereoscopic Image Inpainting. Complementing the
results of virtual projection and object removal, our
model shows promising performance when inpainting
images in a stereoscopic environment where depth is
not explicitly available. Inpainting the left and right
halves of stereo images separately leads to potentially
disjointed results in the inpainted region, particularly
if there are distinct differences in the global and local
characteristics between the two images. This inco-
herence may have detrimental effects on the resulting
depth image and prevent perfect pixel matching. In
addition, noise and imperfections in the depth image
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
262

generated by the stereo depth estimation process af-
fect the quality of the resulting point cloud. Alterna-
tively, the stereo image and the object mask for in-
painting can be used for object removal during scene
reconstruction to improve the overall performance of
the model in real-world applications.
7 CONCLUSION
Occlusion is a significant problem that complicates
the understanding of a scene as it prevents the accu-
rate perception of spatial relationships between ob-
jects. It impairs depth estimation and leads to inac-
curacies in estimating distances of occluded objects.
Consequently, mitigating the effects of occlusions is
crucial for strengthening the robustness and reliability
of computer vision systems.
We demonstrate the effectiveness of the D-LaMa
model on the occlusion problem through practical
applications. Our proposed methodology proves
promising but depends on the use of a robust, pre-
trained artificial intelligence model for image inpaint-
ing tasks. This enables seamless integration and near
real-time applicability and allows computational chal-
lenges to be met efficiently, while comparable tradi-
tional approaches often remain computationally in-
tensive. Our decision to use synthetic data instead
of real data for evaluation ensures a thorough under-
standing of the challenges and influencing factors and
establishes our approach as a cutting-edge solution in
occlusion completion.
Future Work. In the pursuit of enhancing the robust-
ness and practical applicability of our approach, we
outline our future research, encompassing the tran-
sition to real-world data and the development of a
dedicated model through transfer learning. The train-
ing time can be reduced by using existing knowledge.
In addition, machine learning models, such as object
recognition or segmentation, can be used to generate
accurate object masks. While synthetic data provides
controlled scenarios, incorporating the refinements of
real-world data is critical. Future work could incorpo-
rate real data sets to cover the variety and complexity
of real environmental conditions, lighting variations,
and unforeseen scenarios, providing a more thorough
assessment of the D-LaMa performance in practical
applications.
Furthermore, investigating the pre-conversion of
point clouds into meshes or voxels reprojection can
mitigate occlusion-related problems. To overcome
the limitations in the size of input and output chan-
nels, the implementation of a dedicated inpainting
model can be extended with a 5-channel configura-
tion: Three RGB channels, one grayscale channel for
masks, and one channel for depth. This improvement
intends to inpaint texture and spatial information si-
multaneously. For stereoscopic input, we suggest a
7-channel setup which aims to produce coherent re-
sults for both the left and right images.
ACKNOWLEDGEMENTS
We thank Thomas Odaker and Elisabeth Mayer, who
supported this work with helpful discussions and
feedback.
REFERENCES
Achlioptas, P., Diamanti, O., Mitliagkas, I., and Guibas, L.
(2018). Learning representations and generative mod-
els for 3d point clouds. In International conference on
machine learning, pages 40–49. PMLR.
Aharchi, M. and Ait Kbir, M. (2020). A review on 3d recon-
struction techniques from 2d images. In Ben Ahmed,
M., Boudhir, A. A., Santos, D., El Aroussi, M., and
Karas,
˙
I. R., editors, Innovations in Smart Cities Ap-
plications Edition 3, pages 510–522, Cham. Springer
International Publishing.
AI, L. (2015). Pytorch lightning. accessed on 01. August
2023.
Amenta, N., Bern, M., and Kamvysselis, M. (1998). A new
voronoi-based surface reconstruction algorithm. In
Proceedings of the 25th annual conference on Com-
puter graphics and interactive techniques, pages 415–
421.
Bajaj, C. L., Bernardini, F., and Xu, G. (1995). Auto-
matic reconstruction of surfaces and scalar fields from
3d scans. In Proceedings of the 22nd annual con-
ference on Computer graphics and interactive tech-
niques, pages 109–118.
Bernardini, F., Mittleman, J., Rushmeier, H., Silva, C., and
Taubin, G. (1999). The ball-pivoting algorithm for
surface reconstruction. IEEE transactions on visual-
ization and computer graphics, 5(4):349–359.
Bradski, G. (2000). The OpenCV Library. Dr. Dobb’s Jour-
nal of Software Tools.
Brock, A., Lim, T., Ritchie, J. M., and Weston, N.
(2016). Generative and discriminative voxel modeling
with convolutional neural networks. arXiv preprint
arXiv:1608.04236.
Chen, Y. and Medioni, G. (1995). Description of complex
objects from multiple range images using an inflating
balloon model. Computer Vision and Image Under-
standing, 61(3):325–334.
Chen, Y.-T., Garbade, M., and Gall, J. (2019). 3d seman-
tic scene completion from a single depth image using
adversarial training.
Chen, Z. and Zhang, H. (2019). Learning implicit fields
for generative shape modeling. In Proceedings of the
D-LaMa: Depth Inpainting of Perspective-Occluded Environments
263

IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 5939–5948.
Curless, B. and Levoy, M. (1996). A volumetric method for
building complex models from range images. In Pro-
ceedings of the 23rd annual conference on Computer
graphics and interactive techniques, pages 303–312.
Dai, A., Ritchie, D., Bokeloh, M., Reed, S., Sturm, J., and
Nießner, M. (2018). Scancomplete: Large-scale scene
completion and semantic segmentation for 3d scans.
Davis, J., Marschner, S. R., Garr, M., and Levoy, M. (2002).
Filling holes in complex surfaces using volumetric
diffusion. In Proceedings. First international sympo-
sium on 3d data processing visualization and trans-
mission, pages 428–441. IEEE.
Developers, T. (2023). Tensorflow.
Doria, D. and Radke, R. J. (2012). Filling large holes
in lidar data by inpainting depth gradients. In 2012
IEEE Computer Society Conference on Computer Vi-
sion and Pattern Recognition Workshops, pages 65–
72. IEEE.
Edelsbrunner, H. and M
¨
ucke, E. P. (1994). Three-
dimensional alpha shapes. ACM Transactions On
Graphics (TOG), 13(1):43–72.
Esser, P., Rombach, R., and Ommer, B. (2021). Tam-
ing transformers for high-resolution image synthesis.
In Proceedings of the IEEE/CVF conference on com-
puter vision and pattern recognition, pages 12873–
12883.
Fan, H., Su, H., and Guibas, L. J. (2017). A point set gener-
ation network for 3d object reconstruction from a sin-
gle image. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 605–
613.
Firman, M., Mac Aodha, O., Julier, S., and Brostow, G. J.
(2016). Structured prediction of unobserved voxels
from a single depth image. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion, pages 5431–5440.
Girdhar, R., Fouhey, D. F., Rodriguez, M., and Gupta, A.
(2016). Learning a predictable and generative vec-
tor representation for objects. In Computer Vision–
ECCV 2016: 14th European Conference, Amsterdam,
The Netherlands, October 11-14, 2016, Proceedings,
Part VI 14, pages 484–499. Springer.
Groueix, T., Fisher, M., Kim, V. G., Russell, B. C., and
Aubry, M. (2018). A papier-m
ˆ
ach
´
e approach to learn-
ing 3d surface generation. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 216–224.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
He, L., Bleyer, M., and Gelautz, M. (2011). Object removal
by depth-guided inpainting. In Proc. AAPR Workshop,
pages 1–8. Citeseer.
Hervieu, A., Papadakis, N., Bugeau, A., Gargallo, P., and
Caselles, V. (2010). Stereoscopic image inpainting:
distinct depth maps and images inpainting. In 2010
20th international conference on pattern recognition,
pages 4101–4104. IEEE.
Heusel, M., Ramsauer, H., Unterthiner, T., Nessler, B., and
Hochreiter, S. (2017). Gans trained by a two time-
scale update rule converge to a local nash equilibrium.
Advances in neural information processing systems,
30.
Huang, H.-Y. and Huang, S.-Y. (2020). Fast hole filling for
view synthesis in free viewpoint video. Electronics,
9(6):906.
Insafutdinov, E. and Dosovitskiy, A. (2018). Unsupervised
learning of shape and pose with differentiable point
clouds. Advances in neural information processing
systems, 31.
Isola, P., Zhu, J.-Y., Zhou, T., and Efros, A. A. (2017).
Image-to-image translation with conditional adversar-
ial networks. In Proceedings of the IEEE conference
on computer vision and pattern recognition, pages
1125–1134.
Kazhdan, M., Bolitho, M., and Hoppe, H. (2006). Pois-
son surface reconstruction. In Proceedings of the
fourth Eurographics symposium on Geometry pro-
cessing, volume 7, page 0.
Li, D., Shao, T., Wu, H., and Zhou, K. (2016). Shape com-
pletion from a single rgbd image. IEEE transactions
on visualization and computer graphics, 23(7):1809–
1822.
Li, D.-H., Hang, H.-M., and Liu, Y.-L. (2013). Virtual view
synthesis using backward depth warping algorithm. In
2013 Picture Coding Symposium (PCS), pages 205–
208. IEEE.
Li, J., Xu, K., Chaudhuri, S., Yumer, E., Zhang, H., and
Guibas, L. (2017). Grass: Generative recursive au-
toencoders for shape structures. ACM Transactions
on Graphics (TOG), 36(4):1–14.
Li, S., Zhu, C., and Sun, M.-T. (2018). Hole filling with
multiple reference views in dibr view synthesis. IEEE
Transactions on Multimedia, 20(8):1948–1959.
Li, Y., Dai, A., Guibas, L., and Nießner, M. (2015).
Database-assisted object retrieval for real-time 3d re-
construction. In Computer graphics forum, vol-
ume 34, pages 435–446. Wiley Online Library.
Lin, C.-H., Kong, C., and Lucey, S. (2018). Learning ef-
ficient point cloud generation for dense 3d object re-
construction. In proceedings of the AAAI Conference
on Artificial Intelligence, volume 32, pages 7114—-
7121.
Mark, W. R., McMillan, L., and Bishop, G. (1997). Post-
rendering 3d warping. In Proceedings of the 1997
symposium on Interactive 3D graphics, pages 7–ff.
Mescheder, L., Geiger, A., and Nowozin, S. (2018). Which
training methods for gans do actually converge? In
International conference on machine learning, pages
3481–3490. PMLR.
Mescheder, L., Oechsle, M., Niemeyer, M., Nowozin, S.,
and Geiger, A. (2019). Occupancy networks: Learn-
ing 3d reconstruction in function space. In Proceed-
ings of the IEEE/CVF conference on computer vision
and pattern recognition, pages 4460–4470.
Mildenhall, B., Srinivasan, P. P., Tancik, M., Barron, J. T.,
Ramamoorthi, R., and Ng, R. (2020). Nerf: Repre-
senting scenes as neural radiance fields for view syn-
thesis.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
264

Mildenhall, B., Srinivasan, P. P., Tancik, M., Barron, J. T.,
Ramamoorthi, R., and Ng, R. (2021). Nerf: Repre-
senting scenes as neural radiance fields for view syn-
thesis. Communications of the ACM, 65(1):99–106.
Mori, Y., Fukushima, N., Yendo, T., Fujii, T., and Tanimoto,
M. (2009). View generation with 3d warping using
depth information for ftv. Signal Processing: Image
Communication, 24(1-2):65–72.
M
¨
uller, T., Evans, A., Schied, C., and Keller, A. (2022).
Instant neural graphics primitives with a multiresolu-
tion hash encoding. ACM Transactions on Graphics
(ToG), 41(4):1–15.
M
¨
uller, S., and Kranzlm
¨
uller, D. (2021). Dynamic Sensor
Matching for Parallel Point Cloud Data Acquisition.
In 29. International Conference in Central Europe on
Computer Graphics (WSCG), pages 21–30.
M
¨
uller, S., and Kranzlm
¨
uller, D. (2022). Dynamic Sensor
Matching based on Geomagnetic Inertial Navigation.
In 30. International Conference in Central Europe on
Computer Graphics (WSCG).
Munkberg, J., Hasselgren, J., Shen, T., Gao, J., Chen, W.,
Evans, A., M
¨
uller, T., and Fidler, S. (2023). Extract-
ing triangular 3d models, materials, and lighting from
images.
Nazeri, K., Ng, E., Joseph, T., Qureshi, F. Z., and Ebrahimi,
M. (2019). Edgeconnect: Generative image inpainting
with adversarial edge learning.
Nealen, A., Igarashi, T., Sorkine, O., and Alexa, M. (2006).
Laplacian mesh optimization. In Proceedings of the
4th international conference on Computer graphics
and interactive techniques in Australasia and South-
east Asia, pages 381–389.
Park, J. J., Florence, P., Straub, J., Newcombe, R., and
Lovegrove, S. (2019). Deepsdf: Learning continu-
ous signed distance functions for shape representa-
tion. In Proceedings of the IEEE/CVF conference on
computer vision and pattern recognition, pages 165–
174.
Paszke, A., Gross, S., Massa, F., Lerer, A., Bradbury, J.,
Chanan, G., Killeen, T., Lin, Z., Gimelshein, N.,
Antiga, L., et al. (2019). Pytorch: An imperative style,
high-performance deep learning library. Advances in
neural information processing systems, 32.
Pauly, M., Mitra, N., Wallner, J., Pottmann, H., and Guibas,
L. (2008). Discovering structural regularity in 3d ge-
ometry. ACM transactions on graphics, 27.
Pauly, M., Mitra, N. J., Giesen, J., Gross, M. H., and
Guibas, L. J. (2005). Example-based 3d scan comple-
tion. In Symposium on geometry processing, number
CONF, pages 23–32.
Peng, S., Niemeyer, M., Mescheder, L., Pollefeys, M.,
and Geiger, A. (2020). Convolutional occupancy net-
works. In Computer Vision–ECCV 2020: 16th Euro-
pean Conference, Glasgow, UK, August 23–28, 2020,
Proceedings, Part III 16, pages 523–540. Springer.
Polygons, P. (2020). Downtown west modular pack.
https://www.unrealengine.com/marketplace/en-
US/product/6bb93c7515e148a1a0a0ec263db67d5b.
Reiser, C., Peng, S., Liao, Y., and Geiger, A. (2021). Kilo-
nerf: Speeding up neural radiance fields with thou-
sands of tiny mlps. In Proceedings of the IEEE/CVF
International Conference on Computer Vision, pages
14335–14345.
Rock, J., Gupta, T., Thorsen, J., Gwak, J., Shin, D., and
Hoiem, D. (2015). Completing 3d object shape from
one depth image. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 2484–2493.
Rosinol, A., Leonard, J. J., and Carlone, L. (2023). Nerf-
slam: Real-time dense monocular slam with neural ra-
diance fields. In 2023 IEEE/RSJ International Confer-
ence on Intelligent Robots and Systems (IROS), pages
3437–3444. IEEE.
Ross, A. and Doshi-Velez, F. (2018). Improving the ad-
versarial robustness and interpretability of deep neu-
ral networks by regularizing their input gradients. In
Proceedings of the AAAI conference on artificial intel-
ligence, volume 32, pages 1660–1669.
scikit image.org (2022). scikit-image.image processing in
python. https://scikit-image.org/.
Shen, C.-H., Fu, H., Chen, K., and Hu, S.-M. (2012). Struc-
ture recovery by part assembly. ACM Transactions on
Graphics (TOG), 31(6):1–11.
Sipiran, I., Gregor, R., and Schreck, T. (2014). Approximate
symmetry detection in partial 3d meshes. In Computer
Graphics Forum, volume 33, pages 131–140. Wiley
Online Library.
Song, S., Yu, F., Zeng, A., Chang, A. X., Savva, M., and
Funkhouser, T. (2017). Semantic scene completion
from a single depth image. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 1746–1754.
Sorkine, O. and Cohen-Or, D. (2004). Least-squares
meshes. In Proceedings Shape Modeling Applica-
tions, 2004., pages 191–199. IEEE.
Sung, M., Kim, V. G., Angst, R., and Guibas, L. (2015).
Data-driven structural priors for shape completion.
ACM Transactions on Graphics (TOG), 34(6):1–11.
Suvorov, R., Logacheva, E., Mashikhin, A., Remizova, A.,
Ashukha, A., Silvestrov, A., Kong, N., Goka, H., Park,
K., and Lempitsky, V. (2022). Resolution-robust large
mask inpainting with fourier convolutions. In Pro-
ceedings of the IEEE/CVF winter conference on ap-
plications of computer vision, pages 2149–2159.
Tatarchenko, M., Dosovitskiy, A., and Brox, T. (2017). Oc-
tree generating networks: Efficient convolutional ar-
chitectures for high-resolution 3d outputs. In Proceed-
ings of the IEEE international conference on com-
puter vision, pages 2088–2096.
Wang, L., Jin, H., Yang, R., and Gong, M. (2008). Stereo-
scopic inpainting: Joint color and depth completion
from stereo images. In 2008 IEEE Conference on
Computer Vision and Pattern Recognition, pages 1–8.
IEEE.
Wang, N., Zhang, Y., Li, Z., Fu, Y., Liu, W., and Jiang, Y.-
G. (2018a). Pixel2mesh: Generating 3d mesh models
from single rgb images. In Proceedings of the Euro-
pean conference on computer vision (ECCV), pages
52–67.
Wang, T.-C., Liu, M.-Y., Zhu, J.-Y., Tao, A., Kautz, J., and
Catanzaro, B. (2018b). High-resolution image synthe-
sis and semantic manipulation with conditional gans.
D-LaMa: Depth Inpainting of Perspective-Occluded Environments
265

In Proceedings of the IEEE conference on computer
vision and pattern recognition, pages 8798–8807.
Wang, Z., Bovik, A. C., Sheikh, H. R., and Simoncelli, E. P.
(2004). Image quality assessment: from error visi-
bility to structural similarity. IEEE transactions on
image processing, 13(4):600–612.
Wang, Z., Simoncelli, E. P., and Bovik, A. C. (2003). Mul-
tiscale structural similarity for image quality assess-
ment. In The Thrity-Seventh Asilomar Conference on
Signals, Systems & Computers, 2003, volume 2, pages
1398–1402. Ieee.
Wu, J., Zhang, C., Xue, T., Freeman, B., and Tenenbaum, J.
(2016). Learning a probabilistic latent space of object
shapes via 3d generative-adversarial modeling. Ad-
vances in neural information processing systems, 29.
Wu, R., Zhuang, Y., Xu, K., Zhang, H., and Chen, B.
(2020). Pq-net: A generative part seq2seq network
for 3d shapes. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition,
pages 829–838.
Yan, X., Yang, J., Yumer, E., Guo, Y., and Lee, H. (2016).
Perspective transformer nets: Learning single-view
3d object reconstruction without 3d supervision. Ad-
vances in neural information processing systems, 29.
Yan, Z., Li, X., Li, M., Zuo, W., and Shan, S. (2018). Shift-
net: Image inpainting via deep feature rearrangement.
Yang, Y., Feng, C., Shen, Y., and Tian, D. (2018). Fold-
ingnet: Point cloud auto-encoder via deep grid defor-
mation. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 206–
215.
Yao, L., Han, Y., and Li, X. (2019). Fast and high-
quality virtual view synthesis from multi-view plus
depth videos. Multimedia Tools and Applications,
78:19325–19340.
Ydrive (2022). Easysynth.
https://www.unrealengine.com/marketplace/en-
US/product/easysynth.
Yu, J., Lin, Z., Yang, J., Shen, X., Lu, X., and Huang, T.
(2019). Free-form image inpainting with gated con-
volution.
Zhang, R., Isola, P., Efros, A. A., Shechtman, E., and Wang,
O. (2018). The unreasonable effectiveness of deep
features as a perceptual metric. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 586–595.
Zhou, Q.-Y., Park, J., and Koltun, V. (2018). Open3d: A
modern library for 3d data processing.
Zou, C., Yumer, E., Yang, J., Ceylan, D., and Hoiem, D.
(2017). 3d-prnn: Generating shape primitives with
recurrent neural networks. In Proceedings of the IEEE
International Conference on Computer Vision, pages
900–909.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
266
