
Safe Behavior Model Synthesis:
From STPA to LTL to SCCharts
Jette Petzold
a
and Reinhard von Hanxleden
b
Department of Computer Science, Kiel University, Kiel, Germany
Keywords:
STPA, LTL, Behavior Model, Model Synthesis.
Abstract:
In Model-Driven Engineering developers create a model of the system. Typically, such a model is verified to be
safe by using model checking. For this, the developers need to create Linear Temporal Logic (LTL) formulas.
Determining these formulas and modeling the system in the first place is time consuming and error-prone. We
propose to automatically create the LTL formulas based on a risk analysis that has to be done anyway. This
reduces errors and the time needed to create the formulas. Furthermore, we use these formulas to automatically
synthesize a behavior model of the analyzed system that is safe by construction. The presented approach is
implemented in the open-source tool PASTA. A case study with a simplified Adaptive Cruise Control system
shows the applicability of the Safe Behavior Model synthesis.
1 INTRODUCTION
Model-Driven Engineering (MDE) is widely used in
system development. The developer creates a behav-
ior model of the system, which is used as a basis for
implementing the system. The safety of the result-
ing system must be verified e. g. with model check-
ing (Clarke, 1997). When using model checking, the
system specifications are translated into formulas us-
ing e. g. Linear Temporal Logic (LTL) or Signal Tem-
poral Logic (STL) and a model checker determines
whether the model fulfills them. We focus on LTL.
Creating LTL formulas and modeling a system in
the first place are non-trivial. System modeling is
very time-consuming, which is why techniques exist
to generate them automatically (Uchitel et al., 2001).
However, with this approach the necessity of creat-
ing LTL formulas and verifying the model, still ex-
ists. Generating the LTL formulas automatically can
reduce the time effort and the risk of mistakes.
To generate the LTL formulas automatically, the
safety properties of a system must be determined.
This can be done by performing a risk analysis, which
is mandatory for safety-critical systems. System-
Theoretic Process Analysis (STPA) is a risk analysis
technique that identifies more risks than traditional
hazard analysis techniques (Leveson, 2016).
a
https://orcid.org/0000-0002-5559-7073
b
https://orcid.org/0000-0001-5691-1215
LTL formulas can be used to verify a model for
the system. However, such a verification is time-
consuming. Using the formulas to create a safe by
construction model, reduces this time-effort.
This is the reason, we want to use STPA to au-
tomatically create LTL formulas and these formulas
to automatically synthesize a behavior model that is
safe by construction. For that, we propose rules to
automatically translate the resulting safety properties
of STPA to LTL formulas ensuring that no property
is forgotten and reducing the time effort for creat-
ing the formulas. Based on these formulas, we pro-
pose a synthesis of a Safe Behavior Model (SBM)
core as a statechart. This way, the resulting model is
safe by construction in respect to the safety properties
identified. The presented approach is implemented
in the open-source Pragmatic Automated System-
Theoretic Process Analysis (PASTA) tool
1
(Petzold
et al., 2023) using Sequentially Constructive State-
charts (SCCharts) (von Hanxleden et al., 2014).
Contributions & Outline. section 2 reviews STPA,
Statecharts, and LTL formulas. We introduce a run-
ning example in section 3. Our main contributions
are as follows:
• We propose a translation of the STPA results to
LTL formulas (section 4).
1
https://github.com/kieler/stpa
Petzold, J. and von Hanxleden, R.
Safe Behavior Model Synthesis: From STPA to LTL to SCCharts.
DOI: 10.5220/0013091600003896
In Proceedings of the 13th International Conference on Model-Based Software and Systems Engineering (MODELSWARD 2025), pages 133-140
ISBN: 978-989-758-729-0; ISSN: 2184-4348
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
133

• We present an approach to create an SBM core
based on these formulas (section 5).
• We extend STPA with Desired Control Actions
(DCAs) to cover system goals (section 6).
We present the results of the application of our ap-
proach to the running example in section 7 and sec-
tion 8 discusses the approach. section 9 reviews re-
lated work and section 10 concludes the paper.
2 BACKGROUND
We give a short introduction of STPA, followed by the
used statechart definition and LTL operators.
System-Theoretic Process Analysis. STPA is
a hazard analysis technique consisting of four
steps (Leveson and Thomas, 2018).
The control structure modeled in Step 2 consists
of controllers and controlled processes. A controller
sends control actions and consists of a process model
that consists of process model variables containing in-
formation about the system.
In Step 3, the analyst defines Unsafe Control Ac-
tions (UCAs) by determining in which contexts a con-
trol action is hazardous. The context can be stated
formally by using context tables (Thomas, 2013). The
context is defined by assigning values to the process
model variables. For each context the analyst deter-
mines whether a control action is hazardous for any
UCA type. A UCA can have one of six types. The ba-
sic ones are PROVIDED and NOT-PROVIDED. They
state that (not) providing the control action is haz-
ardous. Further types are: TOO-LATE, TOO-EARLY,
APPLIED-TOO-LONG, and STOPPED-TOO-SOON.
Statecharts. Statecharts are Extended FSMs
(EFSMs) that are extended with hierarchy and
concurrency (Harel, 1987).
An execution trace is a sequence of states, and in-
and outputs: ((x
0
, s
0
, y
0
), (x
1
, s
1
, y
1
), . . . ) with s
i
state,
x
i
input, and y
i
output in reaction i.
Linear Temporal Logic. We use LTL formulas for
EFSM traces as defined by Lee and Seshia (Lee and
Seshia, 2017), especially the following operators: G,
F , X, U, and R .
3 ADAPTIVE CRUISE CONTROL
EXAMPLE
To demonstrate our approach, we use a simplified
Adaptive Cruise Control (ACC) (Venhovens et al.,
2000). The vehicle with the ACC follows another
one and should accelerate when the distance is above
some safe distance, should decelerate when the dis-
tance is below the safe distance, and should fully stop
when it is below a minimal distance.
We performed STPA on this system. The control
structure consists of a software controller with accel-
erate, decelerate, and stop as control actions. In the
process model of the controller, the variable dist is de-
fined with the values it can take: stopDist, brakeDist,
safeDist, and accDist.
We will use the following selected UCAs of the
ACC to explain our approach.
UCA1. Accelerate is provided when the distance is
the breaking distance.
UCA2. Accelerate is applied too long when the dis-
tance is above the safe distance.
UCA3. Decelerate is not provided when the distance
is the breaking distance.
UCA4. Decelerate is stopped too soon when the dis-
tance is the breaking distance.
UCA5 Decelerate is provided too late when the dis-
tance is the breaking distance.
The context for UCA2 is dist=accDist and for the
other UCAs it is dist=brakeDist
4 FROM STPA TO LTL
To create a model that is safe by construction, first
the safety properties must be determined. We use
the result of the risk analysis that is done beforehand
to automatically generate LTL formulas representing
the safety properties. This reduces the time to create
such formulas. In STPA the safety properties are the
negation of the UCAs. Hence, we use the UCAs for
the generation of the LTL formulas. To automatically
translate the UCAs, they have to be defined with con-
text tables. Otherwise, the context is stated too infor-
mal to automate the process. Furthermore, we need to
formalize the meaning of the UCA types. No official
interpretation of these types exist. Hence, in this pa-
per we use our interpretations to create corresponding
LTL formulas. Abdulkhaleq et al. (Abdulkhaleq and
Wagner, 2016) also propose LTL formulas for UCAs,
however we disagree with most of their formulas. We
discuss this further in section 9.
MODELSWARD 2025 - 13th International Conference on Model-Based Software and Systems Engineering
134

In the following we use an arbitrary UCA with
control action A and context C. We define subfor-
mulas for the context variables v, representing that C
is present, and control action a, meaning A is sent.
Hence, for UCA1, we set a := accelerate is sent and
v := dist = brakeDist. We will use a short form of the
trace definition: We use (v, a) or (¬v, ¬a), meaning
the input and internal variables are set according to v
or ¬v, respectively. The variables that do not occur
in v can have any value, the state s can be any state,
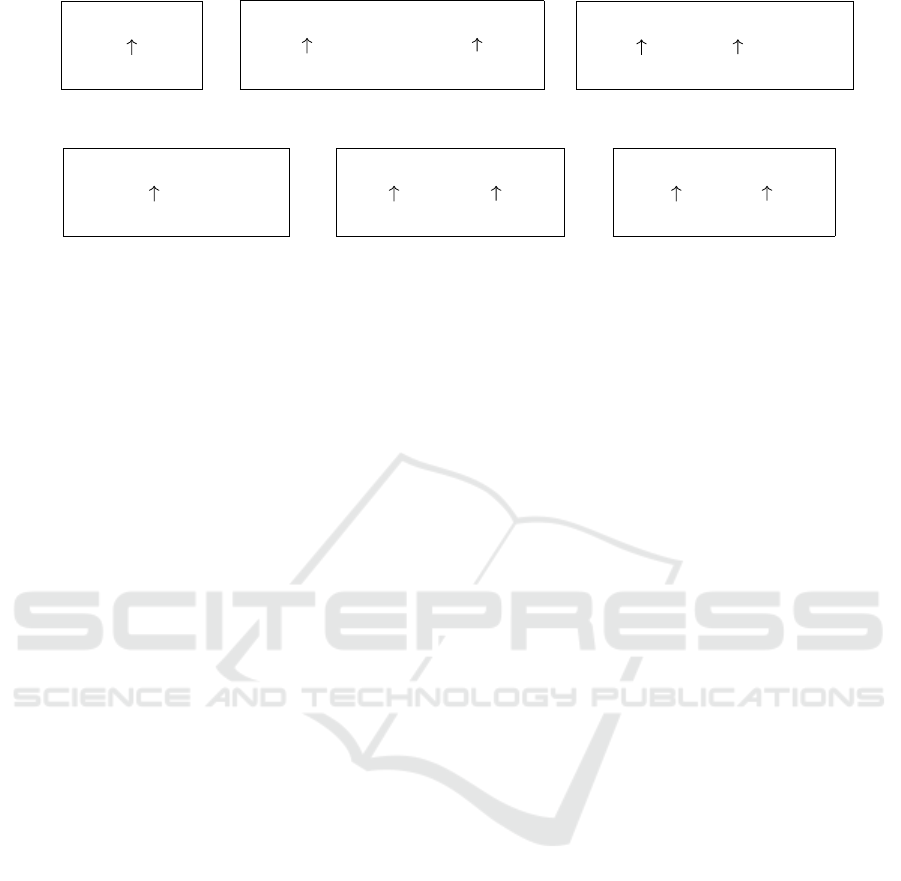
and the output must (not) contain A. Figure 1 gives an
overview of the traces we reject as unsafe.
Provided Formula. For PROVIDED UCAs we use
the formula proposed by Abdulkhaleq et al.:
G(v → ¬a) (1)
It states that every time the context holds, the con-
trol action is not sent. For UCA1 this ensures that
accelerate is not sent when the distance is the break-
ing distance. Traces leading to the UCA as seen in
Figure 1a violate the formula.
Not-Provided Formula. UCAs of type NOT-
PROVIDED can be interpreted in two ways. Either in
every reaction where the context holds the control
action must be sent or during the timespan where the
context holds continuously, the control action must
be sent at least once. Since the first interpretation
also covers the types TOO-LATE and STOPPED-
TOO-SOON, we propose a formula for the second
interpretation.
For UCA3 the formula must ensure that decelerate
is sent at least once when the distance is the breaking
distance. A trace as shown in Figure 1b where the
context changes to false although the control action
was not yet sent should evaluate to false. Let
ψ := v → (aR v ∧ F a),
χ := G((¬v ∧ X v) → X(aR v ∧ F a))
then we translate a UCA of type NOT-PROVIDED to
the following formula:
ψ ∧ χ (2)
In χ the implicant ¬v ∧ X v holds in the reactions
directly before v changes from false to true. This
means the next reaction is the first time where the con-
text holds, and in this reaction ((aR v) ∧ F a) should
hold. (aR v) ensures that when v changes to false, the
control action has to have been sent before.
Since (aR v) evaluates also to true when the con-
trol action is not sent as long as the context holds in-
definitely, we ensure with F a that eventually the con-
trol action will be sent. ψ ensures that the UCA does
not occur in the first reaction.
Too-Late Formula. For TOO-LATE UCAs we only
have to consider the first moment in which the con-
trol action should be provided. For UCA5 we want
to provide decelerate immediately when the distance
changes to the break distance. This leads to the fol-
lowing formula:
(v → a) ∧ G(¬v → X(v → a)) (3)
The second conjunct ensures that traces such as
shown in Figure 1c do not occur. The moment the
control action should be applied is when the context
currently holds and did not hold in the previous reac-
tion. In the formula we capture this in the following
way: The control action should be applied in the next
reaction if the context currently does not hold and in
the next reaction does hold. The first conjunct of (3),
namely v → a, ensures that the UCA does not occur in
the first reaction.
Too-Early Formula. We use the following formula
for TOO-EARLY UCAs:
G((¬v ∧ X v) → ¬a) (4)
The reaction where the context holds but did not
hold in the previous reaction is the first one where
the control action is allowed to be sent. Hence, we
must ensure that before this reaction the control action
is not sent (see Figure 1d). The implicant, namely
¬v ∧ X v, is true if the current reaction is the last one
in which v is false before it switches to true. In such
a reaction the control action is not allowed to be sent,
which is guaranteed by the implication.
Applied-Too-Long Formula. For UCAs of type
APPLIED-TOO-LONG we use the following formula:
G((v ∧ a) → X(¬v → ¬a)) (5)
To ensure an action is not applied too long, we
have to inspect the reactions where the control action
is already applied while the context holds (v ∧ a). In
these reactions, we must ensure that the control action
is not sent anymore when the context does not hold
any longer. Hence, we must check whether the con-
text still holds in the next reaction (X(. . .)). If it does
not, the control action must not be sent. Hence, traces
such as shown in Figure 1e violate the formula. For
UCA2 this ensures that we immediately stop sending
accelerate when the distance value is no longer equal
to the accelerate distance.
Stopped-Too-Soon Formula. To guarantee that a
control action is not stopped too soon, we must ensure
that after it is sent the first time it is continuously sent
Safe Behavior Model Synthesis: From STPA to LTL to SCCharts
135
··· , (v, a), ···
v ✓
¬a
(a) PROVIDED
G(v → ¬a)
··· , (¬v, ¬a), (v, ¬a), (¬v, ¬a), ···
¬v ∧ Xv ✓
aR v
(b) NOT-PROVIDED
G((¬v ∧ Xv) → X(aR v ∧ F a))
··· , (¬v, ¬a), (v, ¬a), (v, a), ···
¬v✓
v → a
(c) TOO-LATE
G(¬v → X(v → a))
··· , (¬v, a), (v, a), ·· ·
¬v ∧ Xv ✓
¬a
(d) TOO-EARLY
G((¬v ∧ Xv) → ¬a)
··· , (v, a), (¬v, a), ···
v ∧ a✓
¬v → ¬a
(e) APPLIED-TOO-LONG
G((v ∧ a) → X(¬v → ¬a))
··· , (v, a), (v, ¬a), ···
v ∧ a✓
¬a → ¬v
(f) STOPPED-TOO-SOON
G((v ∧ a) → X(¬a → ¬v))
Figure 1: Traces for the different UCA types that are prevented by the presented formulas. Here, we do not consider the first
reaction of a trace.
until the context does not longer hold. This means for
UCA4 that when we sent decelerate in the given con-
text, we must do this until the context changes. We
propose a similar formula as for the type APPLIED-
TOO-LONG:
G((v ∧ a) → X(¬a → ¬v)) (6)
Again, we are interested in the reactions where the
context already holds and the control action is applied
(v ∧ a). In such reactions, the formula ensures that
if the control action is not sent in the next reaction,
then the context does not hold either. This prevents
traces as shown in Figure 1f where the control action
is stopped too soon.
5 FROM STPA TO SBM
The generated LTL formulas can be used to perform
model checking on the behavior model of the system.
These behavior models are usually created manually
with the help of supporting tools. However, creating
a model tends to be time-consuming and error-prone.
When performing STPA before modeling the system,
we can use the generated LTL formulas to create the
core for a Safe Behavior Models (SBMs) that respects
the safety requirements by construction. It is not pos-
sible to generate a complete SBM since STPA does not
contain all relevant information. Business logic not
specified in STPA needs to be added manually, which
is further discussed in section 8.
We propose an approach for the automatic gener-
ation of deterministic SBM cores based on the gener-
ated LTL formulas. We assume that no contradicting
UCAs exist, which would lead to contradictory LTL
formulas. STPA tools such as PASTA help to identify
and resolve contradicting UCAs. Additionally, we as-
sume for simplicity that only one control action is sent
at a time and that we have a boot-up step to set up the
system.
In the following we present a translation for each
UCA type. For each translation we use the model re-
sulting from the previous translations as starting point
to produce a more compact SBM.
Basic Structure. We start with states that represent
a control action each and an initial state representing
that no control action is sent. For our ACC example
this results in four states: s
acc
, s
dec
, s
stop
, and s
0
.
The input variables consists of the process model
variables and the actual variables used for their val-
ues. In our example we only have the process
model variable dist with values minDist and safeDist.
Hence, our input variables are dist, minDist, and
safeDist. We track the control action that is sent in an
output variable named controlAction. Each state de-
fines an entry action setting controlAction to the rep-
resented value.
Not-Provided Transitions. The translation of LTL
formulas for NOT-PROVIDED UCAs can be seen in
Figure 2. We cannot automatically determine at
which moment the control action should be sent.
Thus, we set this moment to the first reaction where v
holds, which also covers the TOO-LATE type. Hence,
we must ensure that if the context holds, we go to the
state representing the control action. For each formula
we add transitions from the states not representing a
to the one representing it with trigger v. Thus, for
UCA3 we add transitions from every state to s
dec
.
Too-Late Transitions. Since we have a boot-up
step, we only consider the second conjunct of the
TOO-LATE formula (see (3)). We must ensure that
we are in s
a
when v is true. Thus, we add transitions
MODELSWARD 2025 - 13th International Conference on Model-Based Software and Systems Engineering
136

A
s
a
v
v
.
.
.
Figure 2: Translation of UCA type NOT-PROVIDED. A rep-
resents the set of states without the state s
a
.
s
a
s
0
v
Figure 3: Translation of UCA type PROVIDED.
from states not representing a to s
a
with trigger v as
done for NOT-PROVIDED UCAs.
Provided Transitions. The translation of PRO-
VIDED UCAs is depicted in Figure 3. We must en-
sure that if the context holds, the control action is not
sent. Hence, we add a transition from s
a
to s
0
with
the context as trigger. For UCA1 we add a transition
from s
acc
to s
0
with trigger dist > minDist ∧ dist <
sa f eDist. For the same context or a context contain-
ing v a UCA of type NOT-PROVIDED or TOO-LATE
may have been defined. In the first case, we already
have a transition that leaves s
a
when v holds. In the
second case, we have to ensure that the trigger does
not evaluate to true if another transition is true.
Too-Early Transitions. TOO-EARLY LTL formulas
(see (4)) cannot be translated. We cannot create a
transition that triggers depending on values in the next
reaction. However, this is not problematic. The pre-
sented translation rules ensure that control actions are
not sent too-early.
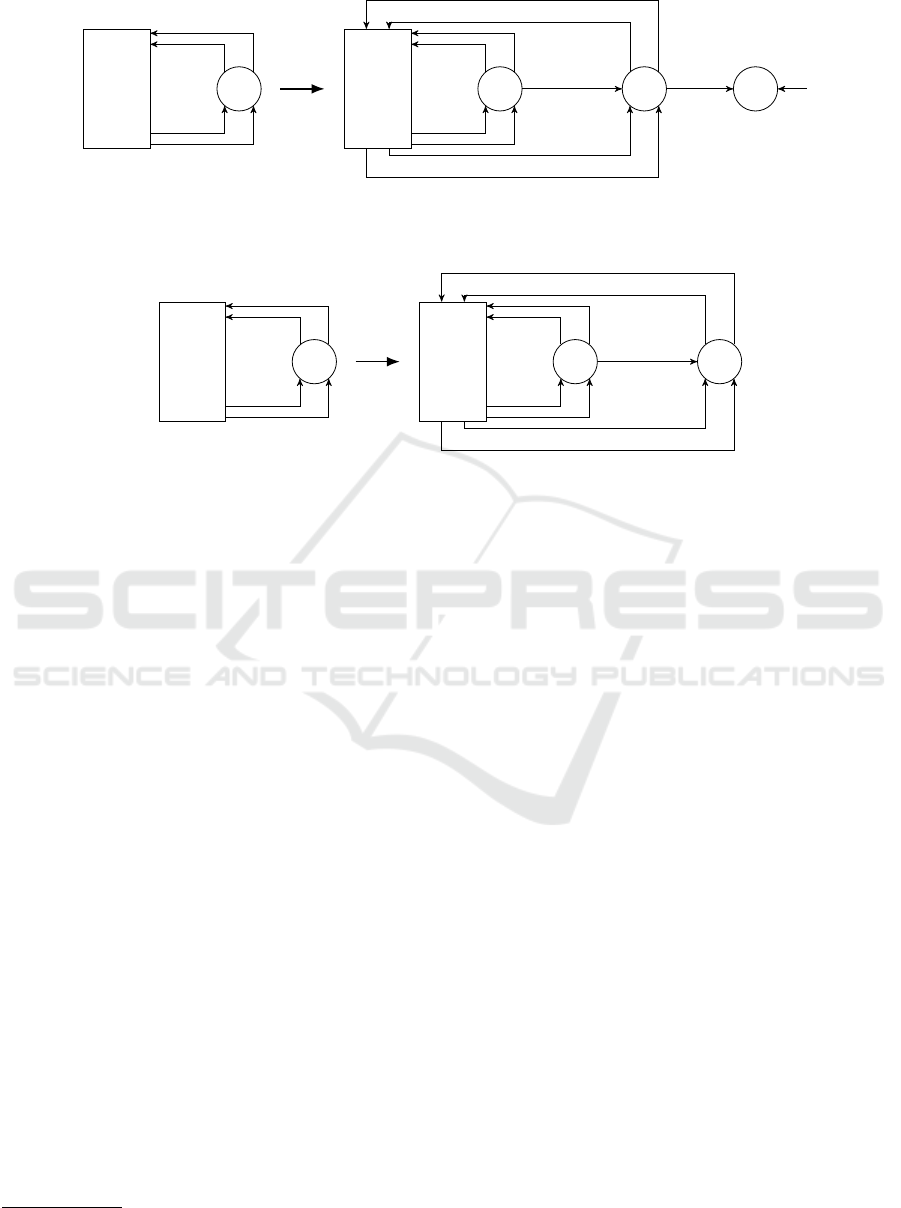
Applied-Too-Long Transitions. If an outgoing
transition of s
a
is triggered for every context c ̸= v,
the APPLIED-TOO-LONG formula (see (5)) is already
fulfilled. Otherwise, we need to split s
a
into two
states by adding s
a_v
. For UCA2 we add the state
s
acc_dist>sa f eDist
.
The result of the translation can be seen in Fig-
ure 4. The triggers of the original transitions to s
a
are
updated to only trigger when v does not hold. Ad-
ditionally, we copy all outgoing transitions of s
a
to
s
a_v
except the ones going to other duplicate states
and add a transition between the two states with trig-
ger v. Now, s
a_v
represents that v holds and the control
action a is sent.
To ensure that the control action is not sent any-
more when the context changes, we add another tran-
sition from s
a_v
to s
0
with trigger !v. To avoid non-
determinism the trigger may have to be adjusted such
that it only evaluates to true when the other transition
triggers are false.
Stopped-Too-Soon Transitions. LTL formulas for
UCAs of type STOPPED-TOO-SOON (see (6)) are
translated in a similar way (Figure 5). If in s
a
no
transition is triggered for v, the formula is already ful-
filled. Otherwise, we need to split s
a
the same way as
done for APPLIED-TOO-LONG.
We modify the outgoing transitions of s
a_v
such
that they trigger when v does not hold. This way, the
control action is not stopped too soon. Here, we are
interested in the transitions from s
a
to duplicates of
this state. After all necessary duplicate states are cre-
ated, these transitions are also copied and modified
for the states created during the STOPPED-TOO-SOON
translation.
6 DESIRED BEHAVIOR
The generated behavior model fulfills the LTL for-
mulas and hence is safe. However, a system should
also fulfill its system goals, which is typically not im-
plied by the safety properties and thus not part of the
presented model generation. However, we can use
the machinery presented so far to achieve that aim as
well.
We extend STPA with Desired Control Actions
(DCAs). A DCA determines in which context a con-
trol action should (not) be sent to fulfill the system
goal. DCAs have two types: PROVIDED and NOT-
PROVIDED. During that identification of UCAs, the
analysts can declare DCAs as well.
These DCAs can be automatically translated to
LTL formulas as done for the UCAs, resulting in a safe
model that also fulfills the system goals.
7 COMPLETE ACC
We implemented the SBM core generation in the open
source tool PASTA. PASTA provides an STPA DSL and
allows the user to select a controller for which the
SBM should be generated. The SBM core is gener-
ated as an SCChart and contains states and variables as
presented in section 5. The UCAs and DCAs are trans-
lated to LTL formulas as described in section 5 and
are added as LTL Annotations to the SCChart, which
enables model checking. In each state an entry action
is defined to set controlAction to the correct value.
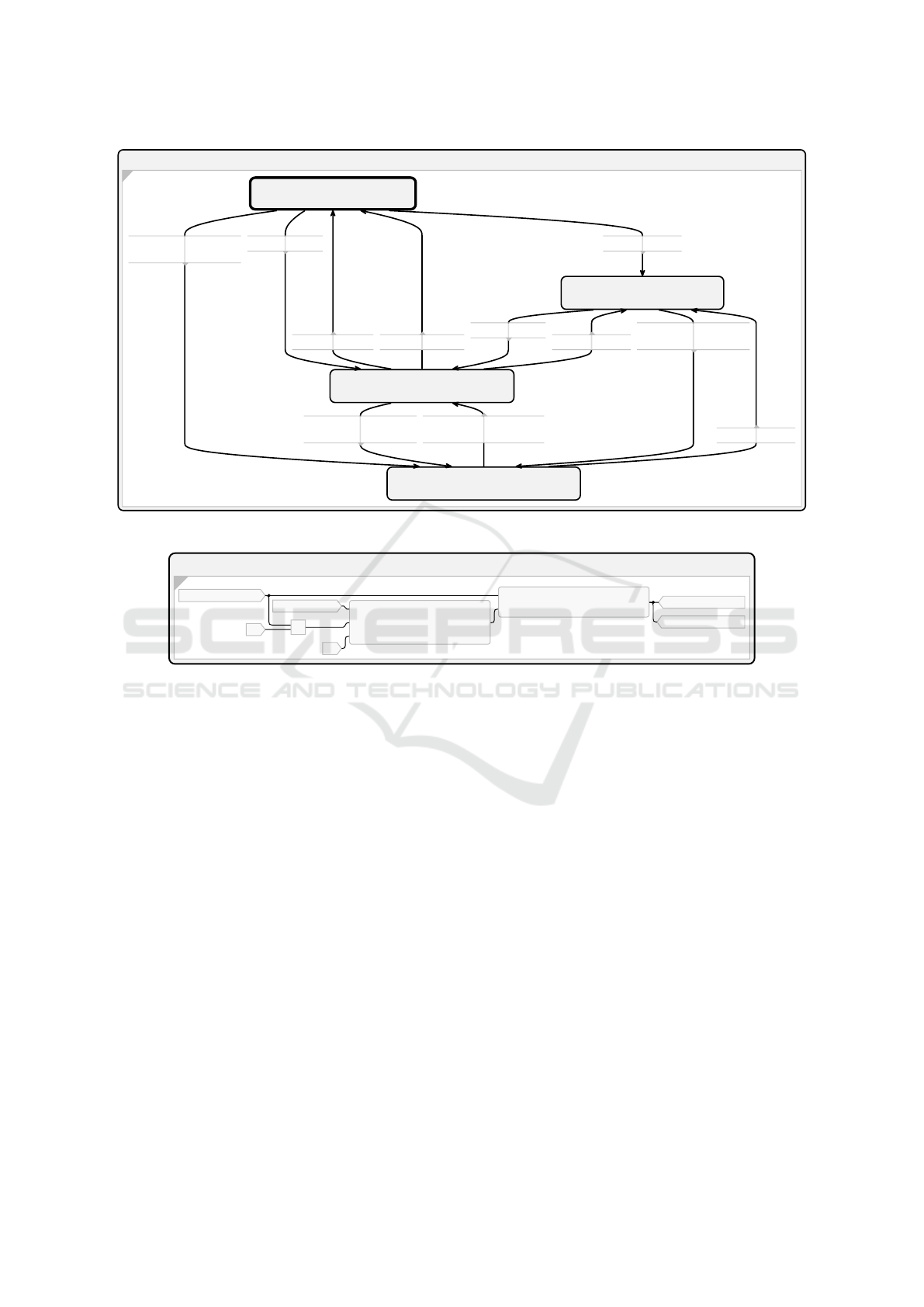
For the ACC example the resulting SBM is shown
in Figure 6. It contains four states: one for each con-
trol action and an initial state.
We used LEGO
®
Mindstorm
®2
robots to test the
2
https://lego.com
Safe Behavior Model Synthesis: From STPA to LTL to SCCharts
137
A
s
a
j
1
j
n
·· ·
k
1
k
m
·· ·
A
s
a
s
a_v
s
0
j
1
∧ ¬v j
n
∧ ¬v
·· ·
j
1
∧ v
j
n
∧ v
.
.
.
k
1
k
m
·· ·
v ¬v
k
1
k
m
.
.
.
Figure 4: Translation of UCA type APPLIED-TOO-LONG. A represents the set of states without the state s
a
.
A
s
a
j
1
j
n
·· ·
k
1
k
m
·· ·
A
s
a
s
a_v
j
1
∧ ¬v j
n
∧ ¬v
·· ·
j
1
∧ v
j
n
∧ v
.
.
.
k
1
k
m
·· ·
v
k
1
∧ ¬v
k
m
∧ ¬v
.
.
.
Figure 5: Translation of UCA type STOPPED-TOO-SOON. A represents the set of states without the state s
a
.
generated controller
3
. For that, we constructed two
robots with wheels and a ultrasonic sensor to resem-
ble two cars. One of them was programmed to drive
ahead and change its speed several times. For the
other one we performed STPA and used the SBM re-
sulting from our approach as presented before. We
added the business logic unspecified in STPA result-
ing in the SCChart shown in Figure 7. First the values
of the sensors are read and safeDist is calculated.
The controller state is the one generated automati-
cally based on the safety analysis. After the controller
determines the control action, the new speed is calcu-
lated in newSpeed and finally the speed is set to the
motor. Deploying the software on the Mindstorm
®
has shown that the controller works as intended.
8 DISCUSSION
We formalized the UCA types since no official inter-
pretation exists. This enables us to automate the gen-
eration of the LTL formulas and SBM core. However,
other interpretations of the types are possible as well.
Whether our interpretation is accepted by the STPA
community has to be evaluated in the future.
The resulting SBM core for the ACC example ful-
fills all generated LTL formulas. Hence, safety proper-
ties as well as the system goals are fulfilled. However,
the presented synthesis only generates the core of the
3
https://doi.org/10.6084/m9.figshare.27095914.v1
SBM. Reading sensor values and determining values
such as safeDist cannot be automatically inferred.
The user has to specify this missing information, but
the generated SCChart can directly be used for the be-
havior of the system. When the missing business logic
is added, the model depicts the desired and safe be-
havior since the determination of the control action is
not changed by the added information.
We evaluated the approach with further use cases
using the LEGO
®
Mindstorms
®
. One use case is an
ACC that respects a specified desired speed. Another
stems from research in the railway domain, where two
trains meet on a single track line. They drive towards
each other, dock on each other such that passengers
can switch the trains, and undock and drive into the
opposite direction than before. We performed STPA
for these cases and used our approach to generate the
SBM. In the second case the SBM consists of eleven
states. We added necessary hardware interaction and
used the generated SBM for the behavior logic as is.
We simulated several scenarios with the Mindstorms
®
revealing safe behavior.
In conclusion, the generated SCChart core fulfills
the LTL formulas used for the generation. The core is
a solid foundation for an SBM to which hardware in-
teraction can be added directly, and since risk analysis
has to be done either way, the synthesis saves time.
Generating the safety properties directly based on a
safety analysis can also reduce incorrect or missing
formulas.
MODELSWARD 2025 - 13th International Conference on Model-Based Software and Systems Engineering
138
SBM_Controller
NoAction
entry
/ controlAction = Controller.NULL
stop
entry
/ controlAction = Controller.stop
accelerate (dist>safeDist)
entry
/ controlAction = Controller.accelerate
decelerate (dist>minDist && dist<safeDist)
entry
/ controlAction = Controller.decelerate
1: dist > minDist && dist <
safeDist
2: dist > safeDist
3: dist <= minDist
1: dist > minDist && dist <
safeDist
2: dist > safeDist
1: dist > minDist && dist <
safeDist
2: dist <= minDist
3: dist == safeDist
4: !(dist > safeDist)
1: dist > safeDist && !(dist >
minDist && dist < safeDist)
2: dist <= minDist
-
Figure 6: Automatically generated SCChart for the ACC example.
Adaptive_Cruise_Control
readDistance()
motorL.getSpeed()
5
/
minDist
safeDist
dist
controlAction
controller
10
controlAction
currentSpeed
newSpeed
newSpeed
motorL.setSpeed()
motorR.setSpeed()
-
Figure 7: Completed SCChart for the ACC example.
9 RELATED WORK
Abdulkhaleq et al. proposed an approach for creat-
ing LTL formulas based on the UCAs of STPA (Ab-
dulkhaleq and Wagner, 2016). We use the same for-
mula they stated for the UCA type PROVIDED. For the
NOT-PROVIDED type Abdulkhaleq et al. proposed a
formula stating that in every reaction where the con-
text holds the control action must be sent. This in-
terpretation already covers other UCA types, which is
why we used our interpretation.
Their formula for type TOO-LATE evaluates to
false for some traces in which the control action is not
provided too late. Their formula for TOO-EARLY has
the same problem. For some traces, where the control
action is not sent too early, the formula evaluates to
false. The types APPLIED-TOO-LONG and STOPPED-
TOO-SOON were not considered in their solution.
Synthesis of behavior models are for example
based on Fluent LTL (FLTL) (Giannakopoulou and
Magee, 2003) or scenario specifications. Scenar-
ios can be specified with Message Sequence Charts
(MSCs), which can be used to synthesize Labelled
Transitions Systems (LTS) (Uchitel et al., 2001). We
use STPA instead of MSCs. This has the advantage
that the results of a risk analysis that must be done
anyway can be used. Additionally, this eliminates the
problem of combining scenarios in unexpected ways
resulting in unexpected system behavior.
When verifying a model according to an LTL for-
mula, the negated formula is translated to a Büchi au-
tomaton, the product automaton of the Büchi automa-
ton and the behavior model is built, and the result-
ing automaton is checked for emptiness (Gerth et al.,
1995). In contrast to this procedure, we do not ver-
ify or construct a model that fulfills one formula. In-
stead, we synthesize the behavior model that fulfills
all given formulas and can further be used to synthe-
size the code for software controllers.
Safe Behavior Model Synthesis: From STPA to LTL to SCCharts
139

10 CONCLUSION
We presented a synthesis of an SBM core from STPA.
First we translate the UCAs from STPA to LTL for-
mulas. Then an SBM core is generated by translating
each control action to a state and the LTL formulas to
transitions. We extended STPA by DCAs to model the
desired behavior as well. They can be translated in
the same way as UCAs.
The synthesis is implemented in PASTA and cre-
ates an SCChart as the SBM. As an example, we
performed a safety analysis of a simplified ACC sys-
tem and deployed the resulting SCChart on LEGO
®
Mindstorms
®
showing the intended behavior. Mini-
mal effort is required to specify the interaction with
the hardware.
In the future we want to evaluate our approach
with complex use cases and whether the DCAs fit
within the scope of a safety analyst’s work.
ACKNOWLEDGEMENTS
This research has been partly funded by the Federal
Ministry for Digital and Transport (BMDV) within the
project “CAPTN Förde 5G”.
REFERENCES
Abdulkhaleq, A. and Wagner, S. (2016). A Systematic and
Semi-Automatic Safety-Based Test Case Generation
Approach Based on Systems-Theoretic Process Anal-
ysis. arXiv preprint arXiv:1612.03103.
Clarke, E. M. (1997). Model checking. In Foundations of
Software Technology and Theoretical Computer Sci-
ence: 17th Conference Kharagpur, India, December
18–20, 1997 Proceedings 17, pages 54–56. Springer.
Gerth, R., Peled, D., Vardi, M. Y., and Wolper, P. (1995).
Simple On-the-fly Automatic Verification of Linear
Temporal Logic. In International Conference on Pro-
tocol Specification, Testing and Verification, pages 3–
18. Springer.
Giannakopoulou, D. and Magee, J. (2003). Fluent Model
Checking for Event-based Systems. In Proceedings
of the 9th European software engineering conference
held jointly with 11th ACM SIGSOFT international
symposium on Foundations of software engineering,
pages 257–266.
Harel, D. (1987). Statecharts: A visual formalism for com-
plex systems. Science of Computer Programming,
8(3):231–274.
Lee, E. A. and Seshia, S. A. (2017). Introduction to Em-
bedded Systems, A Cyber-Physical Systems Approach,
Second Edition. MIT Press.
Leveson, N. and Thomas, J. P. (2018). STPA Handbook.
MIT Partnership for Systems Approaches to Safety
and Security (PSASS).
Leveson, N. G. (2016). Engineering a Safer World: Systems
Thinking Applied to Safety. MIT Press.
Petzold, J., Kreiß, J., and von Hanxleden, R. (2023).
PASTA: Pragmatic Automated System-Theoretic Pro-
cess Analysis. In 53rd Annual IEEE/IFIP Interna-
tional Conference on Dependable Systems and Net-
work, DSN 2023, Porto, Portugal, June 27-30, 2023,
pages 559–567. IEEE.
Thomas, J. P. (2013). Extending and Automating a Systems-
Theoretic Hazard Analysis for Requirements Genera-
tion and Analysis. PhD thesis, MIT.
Uchitel, S., Kramer, J., and Magee, J. (2001). Detecting Im-
plied Scenarios in Message Sequence Chart Specifi-
cations. ACM SIGSOFT Software Engineering Notes,
26(5):74–82.
Venhovens, P., Naab, K., and Adiprasito, B. (2000). Stop
and Go Cruise Control. Technical report, SAE.
von Hanxleden, R., Duderstadt, B., Motika, C., Smyth, S.,
Mendler, M., Aguado, J., Mercer, S., and O’Brien,
O. (2014). SCCharts: Sequentially Constructive
Statecharts for safety-critical applications. In Proc.
ACM SIGPLAN Conference on Programming Lan-
guage Design and Implementation (PLDI ’14), pages
372–383, Edinburgh, UK. ACM.
MODELSWARD 2025 - 13th International Conference on Model-Based Software and Systems Engineering
140
