MEDIATE: Mutually Endorsed Distributed Incentive
Acknowledgment Token Exchange
Philipp Altmann
1
, Katharina Winter
2
, Michael K
¨
olle
1
, Maximilian Zorn
1
and Claudia Linnhoff-Popien
1
1
LMU Munich, Germany
2
Munich University of Applied Sciences, Munich, Germany
Keywords:
Multi-Agent Systems, Reinforcement Learning, Peer Incentivization, Consensus, Emergent Cooperation.
Abstract:
Recent advances in multi-agent systems (MAS) have shown that incorporating peer incentivization (PI) mecha-
nisms vastly improves cooperation. Especially in social dilemmas, communication between the agents helps to
overcome sub-optimal Nash equilibria. However, incentivization tokens need to be carefully selected. Further-
more, real-world applications might yield increased privacy requirements and limited exchange. Therefore,
we extend the PI protocol for mutual acknowledgment token exchange (MATE) and provide additional analysis
on the impact of the chosen tokens. Building upon those insights, we propose mutually endorsed distributed
incentive acknowledgment token exchange (MEDIATE), an extended PI architecture employing automatic to-
ken derivation via decentralized consensus. Empirical results show the stable agreement on appropriate tokens
yielding superior performance compared to static tokens and state-of-the-art approaches in different social
dilemma environments with various reward distributions.
1 INTRODUCTION
Recent advances in using reinforcement learning (RL)
in multi-agent systems (MAS) demonstrated their
feasibility for real-world multi-agent reinforcement
learning (MARL) applications. Those applications
range from smart grids (Omitaomu and Niu, 2021)
and factories (Kim et al., 2020) to intelligent trans-
portation systems (Qureshi and Abdullah, 2013). To
assess the agents’ cooperation capabilities, social
dilemmas producing tensions between the individual
and collective reward maximization (social welfare)
are often used (Dawes, 1980). Yet, the availability of
communication and exchange is vital to fostering co-
operation between self-interested individuals. How-
ever, besides the autonomous interaction within an
environment, increased privacy requirements might
require instances to conceal information regarding
their current state (Tawalbeh et al., 2020). Peer in-
centivization (PI) is a recent branch of research of-
fering a distinct solution for emergent cooperation
between agents. At its core, PI enables agents to
shape each other’s behavior by exchanging reward to-
kens in addition to the environmental reward (Phan
et al., 2022; Lupu and Precup, 2020). However, for
proper integration and effective incentivization, those
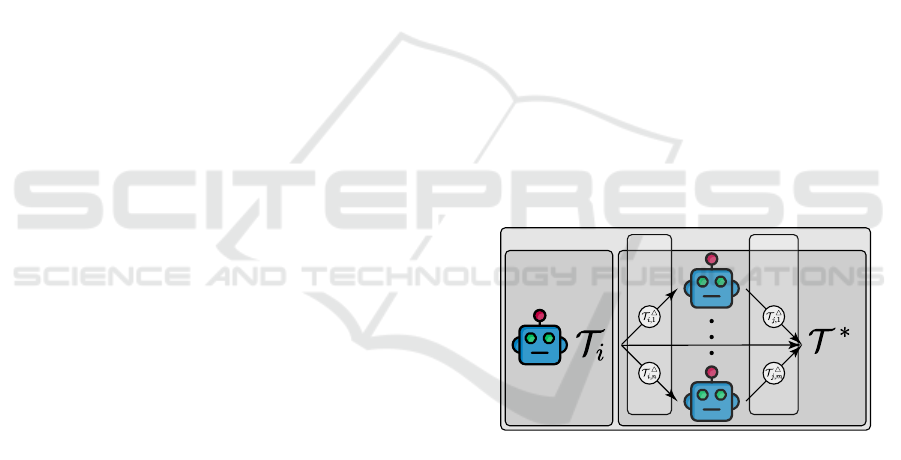
MEDIATE
Token Derivation
Consensus
Request
Response
Figure 1: MEDIATE Architecture deriving a consensual PI
token T
∗
through reciprocal decentralized communication.
exchanged tokens need to be carefully considered, re-
gardless of whether their value is set dynamic or as
a hyperparameter. For the robust and scalable appli-
cability of PI mechanisms in decentralized learning
scenarios, adaptive incentivization tokens and mech-
anisms to agree upon common token values are re-
quired. Yet, current approaches are missing said co-
ordinated adaptability. To overcome these shortcom-
ings, we provide the following contributions:
• We evaluate the effect of different centralized
(common) and decentralized (varying) values for
the incentivization token.
• We propose mutually endorsed distributed incen-
tive acknowledgment token exchange (MEDIATE,
Altmann, P., Winter, K., Kölle, M., Zorn, M. and Linnhoff-Popien, C.
MEDIATE: Mutually Endorsed Distributed Incentive Acknowledgment Token Exchange.
DOI: 10.5220/0013091900003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 1, pages 33-44
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
33

cf. Fig. 1), an automatic token derivation mecha-
nism based on the agents’ value estimate, and a
consensus mechanism to mediate a global token
maintaining local privacy.
• We provide ablation studies of the introduced to-
ken derivation and the consensus mechanism over
a static token. Benchmark comparisons to state-
of-the-art PI approaches show that MEDIATE can
negotiate appropriate tokens that yield improved
cooperation and social welfare in various social
dilemmas with different reward landscapes.
2 PRELIMINARIES
Social Dilemmas. Game Theory analyzes behavior
among rational agents in cooperative and competi-
tive situations (Russell, 2010; Littman, 2001). So-
cial dilemmas are Markov games that inhibit a spe-
cific reward structure, which creates tension between
individual and collective reward maximization. Se-
quential social dilemmas (SSD) are temporally ex-
tended social dilemmas, in which the game repeats
over several time steps (Leibo et al., 2017). The
Nash equilibrium is a situation where no agent can
increase its individual reward by changing its strat-
egy if all other agents maintain their current strategy
(Littman, 2001; Sandholm and Crites, 1996). MARL
utilizes SSDs to analyze and experiment with the so-
cial behavior of different learning strategies (Leibo
et al., 2017). To assess the emergence of cooperation,
we employ the Iterated Prisoner’s Dilemma (IPD),
where mutual defection constitutes a Nash equilib-
rium (Axelrod, 1980; Sandholm and Crites, 1996).
To evaluate the scalability of our approach, we use
the Coin Game with two, four, and six agents (Lerer
and Peysakhovich, 2017). Additionally, we use the
Rescaled Coin Game with two agents to assess the ro-
bustness w.r.t. varying reward landscapes. The rate of
own coins versus total coins collected reflects over-
all cooperation. For insights on long-term coopera-
tion, we use Harvest, posing a risk of the tragedy of
the commons to self-interested agents (Perolat et al.,
2017; Phan et al., 2022). For further details about the
environments used, please refer to the Appendix.
Peer Incentivization. In MAS, cooperation con-
notes the joining of individual problem-solving strate-
gies of autonomous agents into a combined strategy
(Crainic and Toulouse, 2007). The emergent coop-
eration of learning agents necessitates coordination
(No
¨
e, 2006), which poses a vital challenge to current
communication protocols in decentralized MARL
scenarios (Jaques et al., 2019; K
¨
olle et al., 2023; Alt-
mann et al., 2024b). PI is a recent branch of research,
focussing on agents learning to actively shape the be-
havior of others by sending rewards or penalties (Phan
et al., 2022; Yang et al., 2020). These peer rewards
are processed like environment rewards, enabling the
emergence of cooperation. However, new dynamics
arise through the increased inter-dependency, which
comes with new challenges. Carefully designing this
reward mechanism is essential to achieving a good
outcome (Lupu and Precup, 2020).
Consensus in Multi-Agent Systems. Distributed
systems use consensus algorithms to deduct a global
average of local information (Schenato and Gamba,
2007). For MAS, consensus describes the con-
vergence of agents on a mutual value via commu-
nication (Li and Tan, 2019). A consensus algo-
rithm specifies the execution steps to reach consen-
sus (Han et al., 2013). Bee swarms, bird flocks, and
other group-coordinated species show natural behav-
ior (Amirkhani and Barshooi, 2022) that inspires fur-
ther underlying concepts like leadership, voting, or
decision-making (Conradt and Roper, 2005). Two
main application areas for consensus algorithms are
sensor networks (Yu et al., 2009) and blockchain tech-
nology (Monrat et al., 2019), which has played an in-
tegral role in cryptocurrencies and provides promising
solutions for IoT applications. Consensus in sensor
networks mainly deals with the fusion of distributed
data, especially for time-critical data (Schenato and
Gamba, 2007) and uncertainty in large-scale net-
works (Olfati-Saber and Shamma, 2005). Research
in cryptocurrency and IoT focuses on synchronization
(Cao et al., 2019), agreement (Salimitari and Chatter-
jee, 2018), and verification of actions (Lashkari and
Musilek, 2021) between entities in distributed sys-
tems. The number of sophisticated consensus algo-
rithms is growing through the rising importance of de-
centralized coordination mechanisms (Lashkari and
Musilek, 2021) in an increasingly digitally connected
world. Our approach utilizes the cryptographic tech-
nique of additive secret sharing, solving the average
consensus problem for privacy-critical tasks (Li et al.,
2019). MARL research on consensus algorithms has
been increasing recently, intending to reach an opti-
mal joint policy in a decentralized system that is ro-
bust to unreliable agents or adversarial attacks (Figura
et al., 2021). To our knowledge, no research exists
concerning consensus algorithms, PI and RL.
Problem Formulation. We formulate our prob-
lem of a MAS as a stochastic game M =
⟨D, S, Z, A, P, R⟩, with the set of all agents D =
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
34

{1, . . . , N }, a set S of states s
t
at time step t, a set
A = ⟨A
1
, . . . , A
N
⟩ of joint actions a
t
= ⟨a
t,i
⟩
i∈D
,
the transition probability P(s
t+1
| s
t
, a
t
), and the
joint reward R(s
t
, a
t
) = ⟨r
t,i
⟩
i∈D
∈ R. Further-
more, we assume each agent i to have a neighbor-
hood N
t,i
⊆ D \ {i}, bounding its set of local ob-
servations z
t+1
= ⟨z
t+1,i
⟩
i∈D
∈ Z
N
, and the agents’
experience tuple ⟨τ
t,i
, a
t,i
, r
t,i
, z
t+1,i
⟩, where τ
t,i
∈
(Z × A
i
)
t
is the agent’s history. Agent i selects the
next action based on a stochastic policy π
i
(a
t,i
|τ
t,i
).
Simultaneously learning agents cause non-stationary,
i.e., varying transition probabilities over time. The
goal of each self-interested agent i is to find a best
response π
∗
i
that maximizes the expected individual
discounted return:
G
t,i
=
∞
X
k=0
γ
k
r
i,t+k
, (1)
with a discount factor γ ∈ [0, 1). From the perspec-
tive of an agent, other agents are part of its environ-
ment, and policy updates by other agents affect the
performance of an agent’s own policy (Laurent et al.,
2011). The performance of π
i
is evaluated using a
value function V
i
(s
t
) = E
π
[G
t,i
|s
t
] for all s
t
∈ S,
with the joint policy π = ⟨π
j
⟩
j∈D
(Bus¸oniu et al.,
2010). Both the policies π and the value functions
V are approximated by independent neural networks
parameterized by θ and ω, respectively. For sim-
plicity, we omit those for the following and use the
abbreviated forms V
i
= V
ω
i
(τ
t,i
) ≈ V
π
i
(s
t
) and
π
i
= π
θ
i
respectively. To measure efficiency U of the
whole MAS, we furthermore consider the social wel-
fare (Sandholm and Crites, 1996), measured by the
sum of undiscounted returns over all agents within an
episode until time step T :
U =
X
i∈D
T −1
X
t=0
r
t,i
(2)
Furthermore, we use the fraction of own coins to mea-
sure cooperation based on the coins collected by each
agent:
own coins =
# own coins collected
# total coins collected
(3)
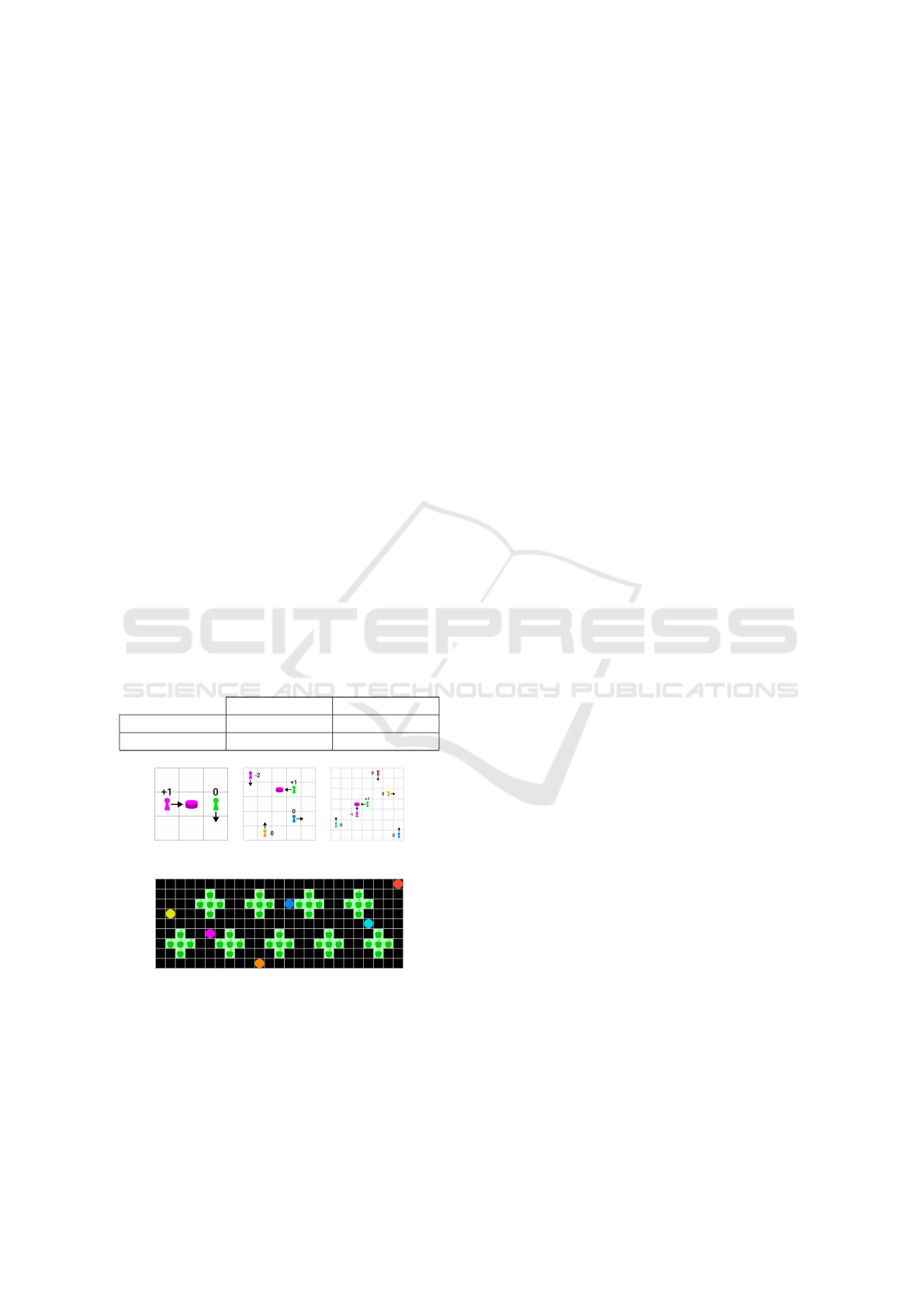
Mutual Acknowledgment Token Exchange
(MATE). MATE is a reciprocal approach to PI
based on a two-phase communication protocol,
as shown in Fig. 2, to exchange acknowledgment
tokens T ≥ 0 for individual reward shaping of r
t,i
,
depending on a monotonic improvement measure
MI
i
. MI
i
(r
t,i
) is defined by the temporal difference
Agent 1
Agent 2
Agent 3
(a) Request phase
Agent 1
Agent 2
Agent 3
(b) Response phase
Figure 2: MATE protocol example. (a) If agent 1 estimates
a monotonic improvement MI
1
(r
t,1
) ≥ 0 of its situation, it
“thanks” its neighbor agents 2 and 3 by sending an acknowl-
edgment request T as reward. (b) Agent 2 and 3 check if
the request T monotonically improves their own situation
along with their own respective reward. If so, a positive re-
ward T is sent back as a response. If not, a negative reward
−T is sent back.
residual of
ˆ
V
i
w.r.t. some arbitrary reward r
t,i
as
proposed in (Phan et al., 2022, 2024):
MI
i
(r
t,i
) = r
t,i
+ γ
ˆ
V
i
(τ
t+1,i
) −
ˆ
V
i
(τ
t,i
) (4)
In the request phase (Fig. 2a), each agent i checks its
current situation via MI
i
. If MI
i
(r
t,i
) ≥ 0, the agent
sends a token x
i
= T as an acknowledgment request
to all other agents j ∈ N
t,i
as a reward. In the re-
sponse phase (Fig. 2b), all request-receiving agents
j ∈ N
t,i
check if the request token x
i
would improve
their situation along with their own respective reward
r
t,j
. If MI
j
(r
t,j
+ x
i
) ≥ 0, then agent j accepts the
request with a positive response token y
j
= T . How-
ever if MI
j
(r
t,j
+ x
i
) < 0, then agent j rejects the
request with a negative response token y
j
= −T . Af-
ter the request and response phase, the shaped MATE
reward is computed for each agent i as follows:
ˆr
t,i
= r
t,i
+ max{⟨x
j
⟩
j∈N
t,i
} + min{⟨y
j
⟩
j∈N
t,i
}
(5)
In the following, we will use the MATE protocol (Fig.
2) and reward (Eq. 5) without any change and explain
our contributions on top of it.
MEDIATE: Mutually Endorsed Distributed Incentive Acknowledgment Token Exchange
35
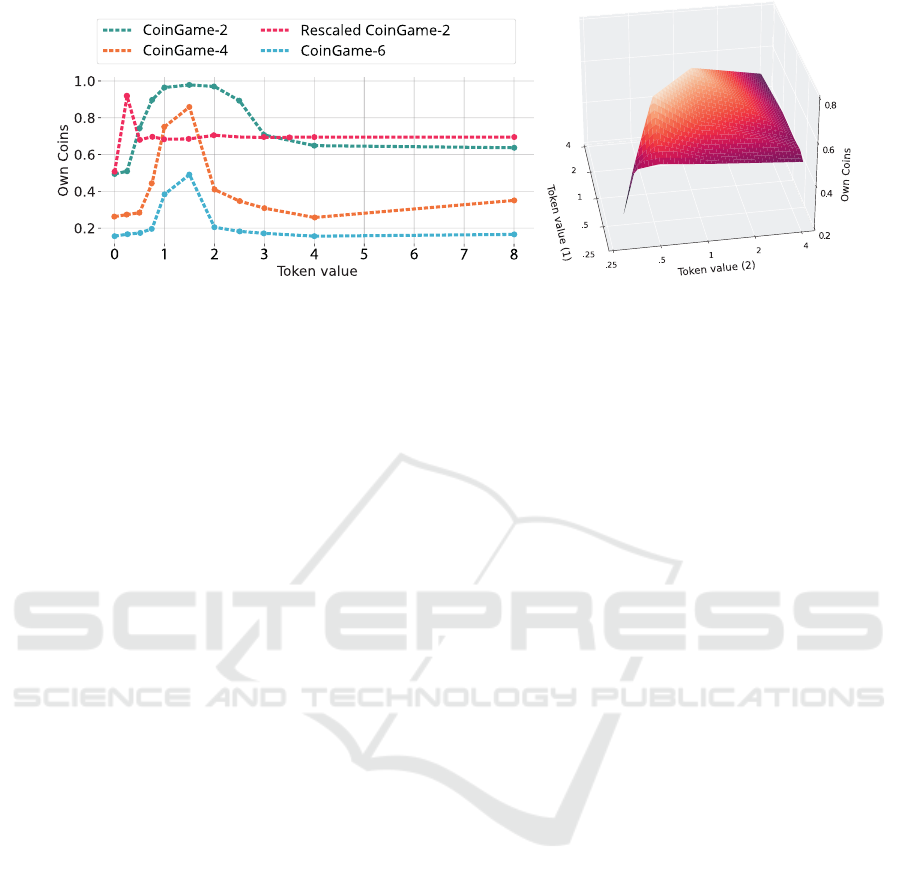
(a) Central token values for CoinGame-2, -4, and -6 (b) Decentralized Token Values for CG-2
Figure 3: Rate of own coins for different tokens when determined centralized (3a) and decentralized (3b).
3 IMPACT OF
INCENTIVIZATION TOKENS
As MATE was previously only evaluated with token
values of 1, we first aim to provide additional insights
into the impact of the incentivization token, supply-
ing an extensive hyperparameter analysis, both per-
agent (decentralized, i.e., x
i
and y
j
may differ) and
globally (centralized, i.e., x
i
= y
j
= T ). Fig. 3a
displays the level of cooperation measured by the
rate of own coins collected for different token val-
ues T ∈ [0, 0.25, 0.5, 0.75, 1, 1.5, 2, 2.5, 3, 4, 8] in
the Coin Game with two, four, and six agents, as
well as the two-agent Coin Game with scaled re-
wards. We averaged all results over five random
seeds. The graphs display high average levels of co-
operation for value 1 in all settings, except for the
down-scaled Coin Game, where token 1 fails. This in-
dicates that the token value is highly dependent on the
reward landscape. Insufficient (inferior) token values
fail to achieve the collective objective, causing self-
interested behavior. Conversely, over-exploitative (in-
temperate) token values likewise fail to yield cooper-
ative behavior. As the number of agents increases,
a value of 1.5 appears optimal within the presented
range, but the required precision for successful coop-
eration varies. Also, the range of token values that
yield high cooperation narrows, retaining its relative
position but exhibiting an increased sensitivity to the
boundaries of that range. The discrepancy between
the optimal token value of 1.5 and the value of 1 in-
creases in the six-agent Coin Game.
The analysis implies that factors like the domain,
the reward landscape, and the number of agents influ-
ence incentive rewards. The range of tokens with dis-
tinctively high cooperation is solely a function of the
environment rewards but depends on the specific dy-
namics of the game, making it challenging to predict.
A fixed token value lacks the adaptability required for
diverse settings, making a priori prediction based on
parameter settings a complex task. It becomes evident
that reward structures are not the sole determinants for
selecting appropriate token weights and may not even
be reliably indicative across all scenarios.
To provide further insights into the dynamics in-
troduced by the choice of incentivization token value,
we modified the protocol to allow the agents to ex-
change disparate tokens. We refer to this mode as de-
centralized. Note that using automated token deriva-
tion in a decentralized setting without a mechanism
for coordination or consensus might result in such
varying token values. Fig. 3b maps the interpolated
cooperation levels in the two-agent Coin Game with
the tokens T ∈ [0.25, 0.5, 1, 2, 4], as values between
1 and 2 have previously shown to be sufficient cen-
tral tokens, employed by both agents, measured by
the rate of own coins. The results reveal that the to-
ken combinations (1, 1) and (2, 2) yield the highest
cooperation rates. Both token values are positioned
in the appropriate token range in the centralized com-
parison (cf. Fig. 3a), and the combinations contain
equal values, which appears to be a significant crite-
rion in this context. Although the combination (1, 2)
includes two appropriate values, the cooperation is
decreased compared to the equal-valued exchange.
With increasing discrepancy between the token val-
ues, cooperation further decreases, suggesting a cor-
relation between the degree of value equality and co-
operation. Agents with over-exploitative token values
can greatly impact other agents, especially those with
limited social influence due to smaller tokens, leading
to a manipulative form of cooperation. Equal but in-
appropriate token values exhibit low performance and
cooperation, which minimizes for (0.25,0.25).
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
36

Overall, this evaluation suggests that the exchange
of decentralized token values must be appropriate and
equal to provide fairness and induce equal coopera-
tion. Nevertheless, the rate of own coins collected
for all tested tokens excels the performance of na
¨
ıve
learning, reflected by token value 0. Conceptually,
these prospects of MATE arise from enabling agents
to share their success, provided the benefits are mu-
tual. As shown before, however, exchanging tokens of
value T = 1 might not always be a sufficient choice
for any given environment.
4 MEDIATE
To elevate PI token values from static hyperparame-
ters to dynamically adaptable domain-specific quanti-
ties, we propose mutually endorsed distributed incen-
tive acknowledgment token exchange (MEDIATE),
combining two progressions (cf. Fig. 1): First, we
provide an automated mechanism to derive dynamic
agent-based incentivization tokens T
i
. To ensure
global convergence of said tokens, we secondly pro-
vide a consensus mechanism that ensures the privacy
of the agents’ local information.
Generally, we intend to improve cooperation by
introducing reciprocal participation (via a positive re-
ward or incentive) if agents experience monotonic im-
provement, i.e., their experienced situation is better
than approximated by their local value estimate, caus-
ing a positive temporal difference. By requiring mu-
tual acknowledgment of this improvement, conver-
gence towards a strategy maximizing efficiency or so-
cial welfare is attained. Thus, mutual PI acts similarly
to a global value function regularizing policy updates.
To further support this effect, we retrieve the dynamic
token values based on the agents’ local value V
i
. This
allows us to provide a lightweight extension, not rely-
ing on additional models to be learned (in contrast to
previous automatic incentivization approaches). ME-
DIATE operates decentralized, individually calculat-
ing a token value for each agent based on their re-
spective value functions. As these token values are
directly used to shape the agents’ reward (c.f. Eq. 5),
incentivization is relative to the agents’ value, push-
ing their strategies towards global cooperation (sim-
ilar to the monotonic improvement) while maintain-
ing value privacy (i.e., an agent does not know the
value function of other agents). This assumption en-
sures both independence and decentralization by en-
abling an agent to operate solely based on its domain-
specific metrics and variables. Alg. 1 depicts the pro-
posed mechanism for deriving and updating individ-
ual tokens.
Algorithm 1: Agent-wise Token Derivation with MEDI-
ATE.
Setup for Agent i ∈ D: T
i
← 0.1; r
min
i
← ∞;
e
V
i
← 0
for Epoch ϵ in Epochs; Agent i ∈ D do
V
i
← {} ▷ Initialize mean values for epoch
for Rollout ⟨τ
0,i
, a
0,i
, r
0,i
, . . . , τ
T,i
, a
T,i
, r
T,i
⟩ in ϵ
do
r
min
i
← min(r
min
i
, ⟨r
0...T,i
⟩)
V
i
← V
i
∪
¯
V
i
(τ ) ▷ Calculate mean value (6)
end for
T
i
← max(T
(∗)
(i)
+ ∇
T
i
, 0) ▷ Update local token
(7)
e
V
i
← median(V
i
)
end for
All agents initially set their token to a small but
non-zero value of 0.1 to differentiate it from a zero-
valued token that would equate to na
¨
ıve learning.
This initialization allows for the immediate incorpo-
ration of the PI mechanism. To ensure an appropriate
acceptance-rejection-ratio and thus an appropriate im-
pact on the behavior of other agents, the token value
must be proportional to the value function. Thus, we
suggest incrementing tokens by the relative difference
between the mean state value estimates across consec-
utive epochs. By doing so, MEDIATE tailors tokens
to the unique dynamics of each domain, thereby fos-
tering equal cooperation across diverse settings. As
a measure of the profit, we derive the mean accumu-
lated value
¯
V of an episode τ of length T similar to
the undiscounted return (cf. Eq. (1)):
¯
V
i
(τ) =
P
T
t=0
V
i
(τ
t,i
)
T
(6)
V
i
refers to the current value approximation of agent
i. Furthermore, we use the median of the mean val-
ues
¯
V over an epoch of episodes to improve stability.
The local tokens T
i
are adjusted every epoch based on
the difference (∆) between the current median of the
mean values (median(V
i
)) and the previous median
of the mean value
e
V
i
:
∇
T
i
= α ·
∆(
e
V
i
, median(V
i
))
e
V
i
· |r
min
i
|, (7)
with α = 0.1 as a constant comparable to a learning
rate and the absolute value of the lowest encountered
environmental reward r
min
i
(cf. Alg. 1) as a scaling
factor. Furthermore, we use the previous median of
the mean value
e
V
i
for normalization. Consequently,
sufficiently large negative state value estimates can
cause positive tokens, which rise when the value fur-
ther decreases. For negative values, the token thus re-
mains proportionate to the absolute magnitude of the
MEDIATE: Mutually Endorsed Distributed Incentive Acknowledgment Token Exchange
37

value function. Furthermore, the resulting token value
is clamped to positive values using the max operation
(cf. Alg. 1), sending a zero token otherwise. Resem-
bling the use of a ReLU activation function (Agarap,
2018), this forces the agent to send no incentive when
unable to send a positive. By this, agents adhere to
the principle of Niceness, which is a core principle for
the reciprocal strategy of MATE, implying no intent
of defection in the request (Phan et al., 2022).
However, besides using appropriate tokens, find-
ings from the analysis of decentralized tokens also
demonstrated the need for equal token values in the
mutual exchange. Therefore, we extend MEDIATE
with a consensus mechanism to reach an agreement
on a mutual token, increasing equality and reducing
the impact of outliers while preserving the privacy of
the agents’ confidential information using additive se-
cret sharing. All agents set up the consensus exchange
by dividing their token values into shares for all
agents in their neighborhood N , reserving one share
for privacy reasons. The token is only reconstructable
when accounting for all shares, which provides secu-
rity against privacy defectors. In the request phase, all
agents i send the corresponding shares [T
△
i,1
, . . . , T
△
i,n
]
to all n neighbors. Each receiving agent j accumu-
lates its received shares [T
△
j,1
, . . . , T
△
j,m+1
] from its m
neighbors, including its reserved share. In the re-
sponse phase, each agent j sends the accumulated
shares to all its neighbors. Each receiving agent i
obtains the accumulated shares from all neighbors,
which it averages over the number of shares, i.e., the
number of agents N , to obtain the reconstructed con-
sensus token T
∗
:
T
∗
=
P
i∈N
P
j∈N
T
△
i,j
N
(8)
In domains like Harvest, with only partially con-
nected agents and changing topologies, the consen-
sus protocol includes a multi-iteration response phase.
Each summed share is tagged with an ID, sent to all
neighbors, and forwarded over multiple time steps
to ensure network-wide information dissemination.
To integrate the reconstructed token into the token
derivation mechanism, we propose two different up-
date mechanisms: Isolated updates the local token T
i
based on the previous local token, which is shared in-
dependently via the consensus protocol: max(T
i
+
∇
T
i
, 0). In contrast, synchronized replaces the local
token with the reconstructed token T
∗
after the con-
sensus phase: max(T
∗
+∇
T
i
, 0). Consequently, only
the token update (cf. Alg. 1) is affected, either syn-
chronized with the consensus token T
∗
or drifting in-
dependently. We will refer to the resulting variants as
MEDIATE-I and MEDIATE-S.
5 RELATED WORK
Various concepts help achieve emergent cooperation
in MAS. Learning with opponent-learning awareness
(LOLA) (Foerster et al., 2018) and stable opponent
shaping (SOS) (Letcher et al., 2019) consider the
learning process of other agents and shape the pol-
icy updates of opponents. Nature and human social
behavior also inspired many concepts. Wang et al.
(2019) developed an evolutionary approach to cre-
ate agents with social behavior by natural selection.
Other work focuses on prosocial agents and intrin-
sic motivation thriving for the manifestation of social
norms (Jaques et al., 2019). Eccles et al. (2019) di-
vided agents into innovators, learning a policy, and
imitators, which reciprocate innovators. Baumann
et al. (2020) insert an external planning agent into the
environment, which can observe all agents and dis-
tribute rewards. Overall, we divide approaches fos-
tering emergent cooperation into constructed artificial
social assemblies, added intrinsic motivation, and ex-
ternal optimization techniques. Our approach com-
bines those concepts, using socially inspired mutual
acknowledgment to shape the environmental rewards.
A large corpus in PI research focuses on similar
approaches to learning incentives integrated into the
model. Gifting integrates the reward-gifting capabil-
ity into agents’ policies as an additional action. Dif-
ferent reward mechanisms can build upon this con-
cept. In zero-sum gifting, agents receive a penalty
for each sent reward to balance the total sum of re-
wards. Gifting can also be only allowed up to a
fixed budget per episode as an alternative to penal-
ization. With a replenishable budget, the reception of
environment rewards can recharge this budget (Lupu
and Precup, 2020). Learning to incentivize other
learning agents (LIO) is another approach that uses
an incentive function to learn appropriate peer re-
wards. Selecting a reward is not part of the action
space but is learned separately by a second model
(Yang et al., 2020). Like LIO, MEDIATE derives
incentives from the agents’ expected environmental
return. However, in contrast to MEDIATE, LIO re-
quires an additional model to be learned to predict
this value, which causes additional overhead. Learn-
ing to share (LToS) also implements two policies,
one for local objectives set by a high-level policy
(Yi et al., 2021). Peer-evaluation-based dual-DQN
(PED-DQN) lets agents evaluate their received peer
signals w.r.t. their environment rewards with an addi-
tional DQN network (Hostallero et al., 2020). Learn-
ing to influence through evaluative feedback (LIEF)
learns to reconstruct the reward function of peers via
feedback. The authors call for an investigation be-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
38

tween a manual, systematic, and learned construction
of rewards (Merhej and Chetouani, 2021). Fayad and
Ibrahim (2021) use counterfactual simulations to de-
rive influential actions. The above concepts modify
the agent models or the action space to derive the in-
trinsic rewards. Rather than altering the agents them-
selves, we utilize an additional protocol layer, which
serves as a tool for agents and yields increased flexi-
bility.
Building upon mutual acknowledgment token ex-
change (MATE) (Phan et al., 2022, 2024), we control
the exchange of incentives via a two-phase commu-
nication protocol (c.f. Fig. 2). In the request phase
of each time step, all agents evaluate their mono-
tonic improvement (MI), c.f. Eq. (4), and potentially
send acknowledgment tokens to all neighbors. In the
response phase, agents evaluate their MI w.r.t. the
sum of environment rewards and the received token,
and respond with a positive or negative token. This
two-way handshake allows agents to give feedback
to other agents when incentives are received, which
fosters cooperation and has been shown to outper-
form na
¨
ıve learning and other PI approaches, like LIO
and Gifting, in various benchmarks regarding effi-
ciency and equality metrics (Phan et al., 2022, 2024).
MATE uses a communication layer and thus provides
a lightweight solution with minimal interference with
the agent model. Due to this flexible and privacy-
conserving design, we evaluate our approach as an ex-
tension of MATE. However, note that other protocol
PI solutions can also utilize MEDIATE.
Overall, we aim to eliminate the need to set the ex-
change token beforehand, which is a central limitation
of MATE. Given their direct combination with the ex-
ternal reward, we argue that incentivization tokens
are sensitive parameters to be carefully considered.
Kuhnle et al. (2023) analyze the Harsanyi-Shapley
value to determine the weight of a side payment based
on the strategic strength of a player in two-player
scenarios. Value decomposition networks (Sunehag
et al., 2018), VAST (Phan et al., 2021), and QMIX
(Rashid et al., 2020) decompose the joint action-value
function into agent-based value functions to achieve
cooperation and maximize social welfare. These ap-
proaches are based on a centralized value function,
whereas our work focuses on independent learners in
a fully decentralized setting. MEDIATE also uses the
value function to automatically derive token values
to be mixed with the environmental reward, posing
a lightweight and efficient solution.
6 EXPERIMENTAL RESULTS
To assess the effect of the introduced token deriva-
tion mechanism and the proposed consensus architec-
ture, we ran evaluations comparing isolated and syn-
chronized MEDIATE in the IPD, CoinGame-2, and
CoinGame-4. As an additional ablation, we use a re-
duced version with only the automated decentralized
token derivation (cf. Alg. 1) without any consensus
mechanism, which we refer to as AutoMATE. Addi-
tionally, we compare the above to na
¨
ıve learning and
MATE with a fixed token of 1. We measure coop-
eration in all Coin Game environments by the ratio
between own coins collected (occ) and total coins
collected (tcc): own coins =
|occ|
|tcc|
. We compare
the performance in the IPD and Harvest by the ap-
proaches’ efficiency (cf. Eq. (2)) as a metric for social
welfare. Additionally, we compare all MEDIATE ab-
lations w.r.t. the convergence of their token value. To
test the scalability of MEDIATE and its robustness to
varying reward distributions, we provide further eval-
uations in the Rescaled Coin Game-2, CoinGame-
6, and Harvest, including benchmark comparisons to
zero-sum- and budget-gifting and LIO.
Training is conducted for 5000 epochs, compris-
ing ten episodes each. We averaged all of the fol-
lowing results over eight random seeds. If not stated
otherwise, all implementations use their default hy-
perparameters from the corresponding source. Please
refer to the appendix for further environment- and im-
plementation details
1
.
6.1 Evaluation of MEDIATE
Fig. 4 shows the evaluation results. The graphs indi-
cate that either synchronized or isolated MEDIATE
updates consistently achieve efficiency and cooper-
ation levels comparable or superior to MATE in all
experimental settings, which legitimates their further
investigation. As expected, na
¨
ıve learning fails to
reach emergent cooperation, again showcasing the
compared environments’ intricacy.
In general, MEDIATE enhances the performance
of AutoMATE across all settings, except for the two-
agent Coin Game scenario, where isolated updates
neither improve nor deteriorate cooperation. The re-
sults imply that the combined automatic and decen-
tralized mechanism - introduced by MEDIATE - pro-
vides sufficient tokens to replace the original MATE
token value of 1. Furthermore, Figs. 4d-4f show that
all automatically derived tokens converge within the
initial 1000 epochs, indicating the purposeful nature
1
All required implementations are available at https://
github.com/philippaltmann/MEDIATE.
MEDIATE: Mutually Endorsed Distributed Incentive Acknowledgment Token Exchange
39
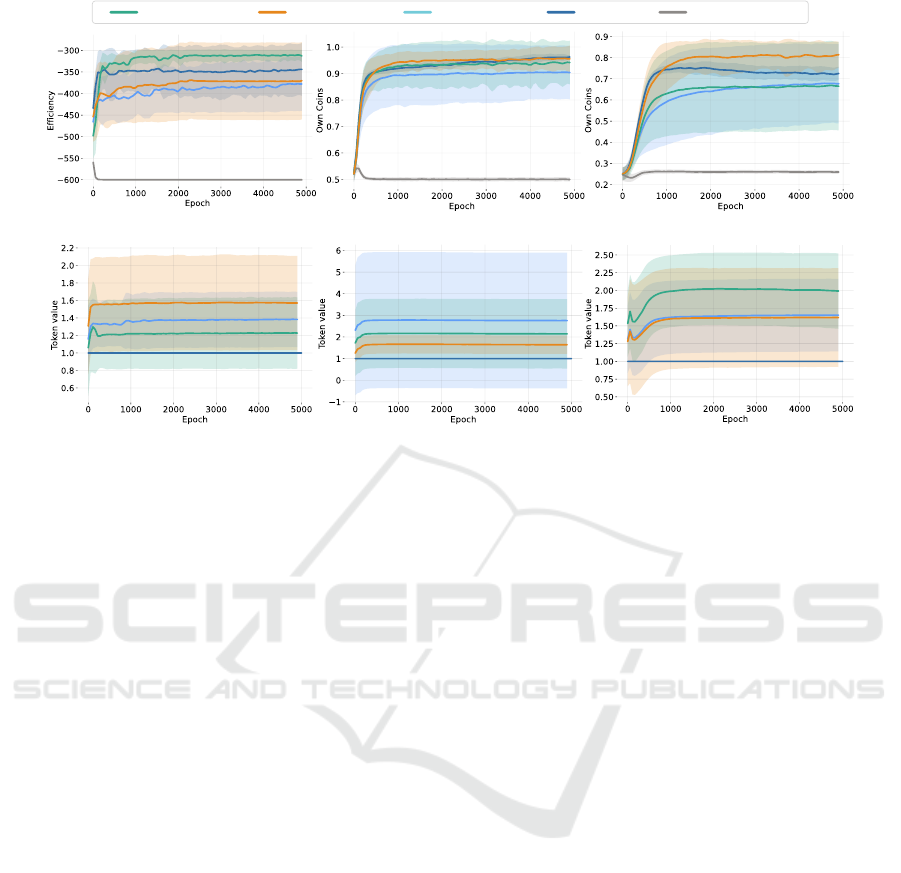
Naive Learning
MATEAutoMATE
MEDIATE-IMEDIATE-S
(a) IPD | Efficiency (b) CoinGame-2 | Own Coins (c) CoinGame-4 | Own Coins
(d) IPD | Token Values (e) CoinGame-2 | Token Values (f) CoinGame-4 | Token Values
Figure 4: MEDIATE Evaluation: Comparing the mean Efficiency (Fig. 4a) and rate of Own Coins (Fig. 4b, 4c) of Na
¨
ıve
Learning (grey), MATE (blue), AutoMATE (light blue), MEDIATE-I (orange), and MEDIATE-S (green), and the Mean
Token Value (Fig. 4d, 4e, 4f) in the IPD (Fig. 4a, 4d), 2-agent CoinGame (Fig. 4b, 4e), and 4-agent CoinGame (Fig. 4c, 4f).
The shaded areas mark the 95% confidence intervals. Overall, MEDIATE outperforms the compared approaches. Isolated
consensus shows improved adaptability to increasing numbers of agents, while Synchronized consensus shows improved
robustness in the negative-valued IPD.
of the proposed architecture. In comparison, the cor-
responding tokens of AutoMATE and MEDIATE all
converge to higher token values than MATE, which,
according to our preliminary studies, are more op-
timal tokens. Wider confidence intervals in token
convergence are generally associated with reduced
efficiency and cooperation, but in the CoinGame-4,
AutoMATE tokens converge to equivalent values as
those with isolated updates. However, although its
confidence interval is narrower, AutoMATE’s perfor-
mance is inferior due to the missing token coordina-
tion between the agents. Comparing the two MEDI-
ATE variants, isolated updates perform better in both
CoinGame settings.
In the negative-valued IPD domain, synchronized
updates show advantages. Overall, in combination
with the token plots, the results show that the update
variant converging to a smaller value, i.e., the respec-
tively less optimistic variant, provides superior tokens
and thus yields improved efficiency and cooperation.
Given the absence of a definitive superior option be-
tween the two MEDIATE variants, we include both in
the benchmark comparisons.
6.2 Benchmark Comparisons
Fig. 5 shows the benchmark results. Table 1 summa-
rizes the final performance metrics. The two-agent
Coin Game features down-scaled rewards (RCG-2),
requiring agents to learn cooperation under minimal
positive and negative environment rewards. In con-
trast to the compared approaches, both MEDIATE
variants achieve significantly higher rewards and mas-
ter the task. Yet, isolated updates exhibit a slight
performance advantage over synchronized updates.
MATE demonstrates moderate cooperation, slightly
improving upon LIO. In contrast, the gifting methods
and na
¨
ıve learning only show marginal cooperation,
although Gifting-Budget performs comparably better.
These results again highlight the superior adaptability
of MEDIATE to unconventional, potentially challeng-
ing reward scenarios that yield improved applicability
to varying tasks.
In the six-agent Coin Game (CG-6), na
¨
ıve learn-
ing performs worst alongside Gifting-Zerosum and
Gifting-Budget. While LIO shows a marginal
improvement, it still lacks significantly behind
MATE and MEDIATE regarding strategic cooper-
ation. MEDIATE-I performs similarly to MATE,
which potentially can be attributed to the limited ca-
pability of isolated updates to manage negative re-
turns. MATE initially demonstrates an optimal learn-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
40
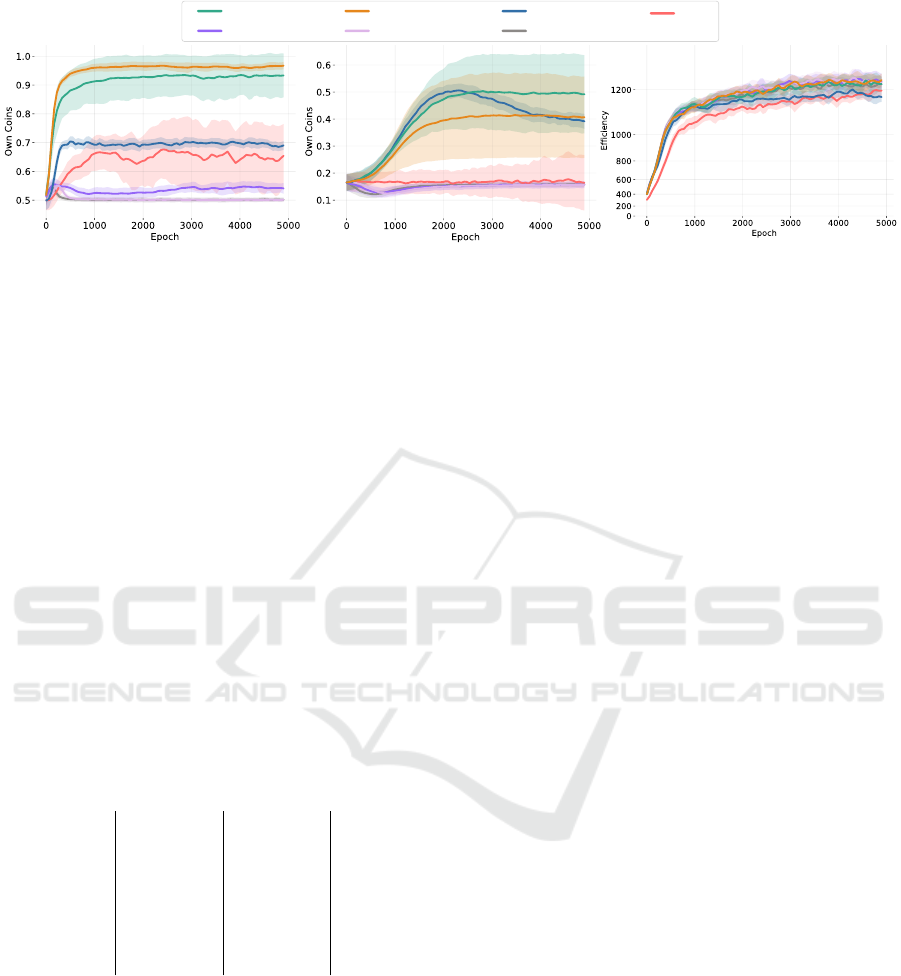
Naive Learning
MATE
MEDIATE-IMEDIATE-S
Gifting-Budget
LIO
Gifting-Zerosum
(a) RCG-2 — Own Coins (b) CG-6 — Own Coins (c) Harvest (6 Agents) — Efficiency
Figure 5: Benchmark Comparison: Mean rate of Own Coins (Fig. 5a, 5b) and Efficiency (Fig. 5c) of MEDIATE-S (green),
MEDIATE-I (orange), MATE (blue), LIO (red), Budget-Gifting (purple), Zerosum-Gifting (pink) and Na
¨
ıve Learning (grey)
in the Rescaled CoinGame-2 (RCG-2) (Fig. 5a), CoinGame-6 (CG-6) (Fig. 5b), and Harvest (Fig. 5c). The shaded areas
mark the 95% confidence intervals. Across all scenarios, MEDIATE shows superior performance. Generally, using Isolated
consensus shows increased adaptability to the intricate reward landscapes specifically considered here.
ing curve but deteriorates in performance afterward.
In terms of cooperation, MEDIATE with synchro-
nized updates emerges as performing best.
Harvest demonstrates the ability of MEDIATE to
benefit in partially connected topologies. Here, ME-
DIATE ranks among the top-performing approaches
and enhances the performance of MATE by providing
an appropriate incentivization token. It thus demon-
strates its efficacy in functioning even within unreli-
able environments while preserving privacy over the
agents’ local value information.
Table 1: Final average of the rate of Own Coins in the
Rescaled CoinGame-2 (RCG-2) and CoinGame-6 (CG-6),
and the Efficiency in Harvest for synchronized and iso-
lated MEDIATE (MEDIATE-S, MEDIATE-I), AutoMATE,
MATE, LIO, Budget- and Zerosum Gifting (Budget-G,
Zerosum-G), and Na
¨
ıve Learning.
RCG-2 CG-6 Harvest
MEDIATE-S 0.93 ± 0.08 0.50 ± 0.16 1212 ± 20
MEDIATE-I 0.97 ± 0.02 0.41 ± 0.16 1232 ± 17
AutoMATE 0.86 ± 0.08 0.18 ± 0.09 1204 ± 35
MATE 0.69 ± 0.01 0.39 ± 0.03 1177 ± 20
LIO 0.69 ± 0.10 0.17 ± 0.11 1192 ± 20
Budget-G 0.54 ± 0.03 0.16 ± 0.02 1232 ± 23
Zerosum-G 0.50 ± 0.01 0.16 ± 0.01 1230 ± 20
Na
¨
ıve L. 0.50 ± 0.01 0.16 ± 0.01 1220 ± 25
Overall, the evaluations demonstrated that emer-
gent cooperation between agents fosters optimal so-
cial welfare. Appropriate reward weights can boost
equal cooperation in social dilemmas, but such
weights’ appropriateness depends on the domain, the
number of agents, the reward structure, or other fac-
tors. Involving a higher number of agents within a
domain increases the required precision. Our exper-
iments show that a token value of 1 - as proposed
for MATE - is not universally appropriate in all do-
mains or settings. In the down-scaled two-agent Coin
Game, token value 1 is inappropriate, and in the six-
agent Coin Game, it does not achieve optimal coop-
eration. Yet across all domains, MEDIATE exhibits
strong adaptability while consistently delivering su-
perior performance, even in challenging cooperative
tasks such as the six-agent Coin Game, scenarios with
complex reward landscapes, or unreliable environ-
ments with partially connected neighborhoods, like
Harvest.
7 CONCLUSION
In this work, we proposed mutually endorsed dis-
tributed incentive acknowledgment token exchange
(MEDIATE). MEDIATE introduces automated PI to-
kens in decentralized MAS with a consensus architec-
ture and two agent-individual update mechanisms.
Token decentralization allows agents to use dif-
ferent tokens in the exchange. Experiments on the
impact of different tokens in social dilemmas sug-
gest that equal and appropriate token values foster
improved social welfare. MEDIATE integrates the
gradient of the agents’ local value function approxi-
mation to derive appropriate tokens matching the ex-
ternal rewards. To achieve consensus on equal to-
kens, we propose extending the MATE protocol based
on additive secret sharing, enabling the identifica-
tion of the token average through the token exchange
while adhering to privacy requirements. The consen-
sus protocol is independent of the underlying algo-
rithm for token derivation. We furthermore evaluate
two token-update variations: A synchronized mecha-
nism based on the reconstructed global token and an
isolated mechanism using the previous local token.
Benchmark evaluations showed that MEDIATE
MEDIATE: Mutually Endorsed Distributed Incentive Acknowledgment Token Exchange
41

achieves high social welfare in all tested domains. In
all evaluated settings, MEDIATE improves the per-
formance of MATE and even outperforms or matches
the best-performing baselines. It represents a robust
and adaptive solution capable of finding appropriate
tokens. Computationally, MEDIATE is comparable
to MATE while overcoming its central limitation of
static token values. The only addition of deriving con-
sented tokens at each update is a sum of constant val-
ues with linear complexity. Furthermore, the token
extends on the value approximation. Thus, compared
to LIO, no additional model needs to be learned.
Yet, even though not apparent in the evaluated
social dilemma environments, this dependence on a
robust value estimate also depicts a central limita-
tion of MEDIATE. Therefore, integrating surrogate
reward metrics like (Altmann et al., 2024a) might im-
prove the overall robustness. Furthermore, the evalu-
ated update mechanisms showed potentially unstable
and prone to outliers. Thus, future work should fo-
cus on producing more accurate tokens, especially for
an increased number of agents, making the overall al-
gorithm more reliable in precision-requiring domains
like the Rescaled CoinGame. Also, while MEDIATE
has been shown to be robust to scaled reward land-
scapes, increasing numbers of agents, and long-term
cooperation scenarios like Harvest, it should be tested
for unreliable connections or defective scenarios.
Overall, MEDIATE provides a lightweight and ro-
bust framework to assess communication consensus
mechanisms with automated peer incentives for emer-
gent cooperation in various scenarios of social dilem-
mas.
ACKNOWLEDGEMENTS
This work is part of the Munich Quantum Valley,
which is supported by the Bavarian state government
with funds from the Hightech Agenda Bayern Plus.
REFERENCES
Agarap, A. F. (2018). Deep learning using rectified linear
units (relu). arXiv preprint arXiv:1803.08375.
Altmann, P., Ritz, F., Zorn, M., K
¨
olle, M., Phan, T., Gabor,
T., and Linnhoff-Popien, C. (2024a). Discriminative
reward co-training. Neural Computing and Applica-
tions, pages 1–17.
Altmann, P., Sch
¨
onberger, J., Illium, S., Zorn, M., Ritz, F.,
Haider, T., Burton, S., and Gabor, T. (2024b). Emer-
gence in multi-agent systems: A safety perspective.
In Leveraging Applications of Formal Methods, Veri-
fication and Validation. Rigorous Engineering of Col-
lective Adaptive Systems, ISoLA ’24, pages 104–120.
Springer Nature.
Amirkhani, A. and Barshooi, A. H. (2022). Consensus in
multi-agent systems: a review. Artificial Intelligence
Review, 55(5):3897–3935.
Axelrod, R. (1980). Effective choice in the prisoner’s
dilemma. Journal of conflict resolution, 24(1):3–25.
Baumann, T., Graepel, T., and Shawe-Taylor, J. (2020).
Adaptive mechanism design: Learning to promote co-
operation. In 2020 International Joint Conference on
Neural Networks (IJCNN), pages 1–7. IEEE.
Bus¸oniu, L., Babu
ˇ
ska, R., and De Schutter, B. (2010).
Multi-agent reinforcement learning: An overview. In-
novations in multi-agent systems and applications-1,
pages 183–221.
Cao, B., Li, Y., Zhang, L., Zhang, L., Mumtaz, S., Zhou,
Z., and Peng, M. (2019). When internet of things
meets blockchain: Challenges in distributed consen-
sus. IEEE Network, 33(6):133–139.
Conradt, L. and Roper, T. J. (2005). Consensus decision
making in animals. Trends in ecology & evolution,
20(8):449–456.
Crainic, T. G. and Toulouse, M. (2007). Explicit and emer-
gent cooperation schemes for search algorithms. In
International Conference on Learning and Intelligent
Optimization, pages 95–109. Springer.
Dawes, R. M. (1980). Social dilemmas. Annual review of
psychology, 31(1):169–193.
Eccles, T., Hughes, E., Kram
´
ar, J., Wheelwright, S., and
Leibo, J. Z. (2019). Learning reciprocity in com-
plex sequential social dilemmas. arXiv preprint
arXiv:1903.08082.
Fayad, A. and Ibrahim, M. (2021). Influence-based rein-
forcement learning for intrinsically-motivated agents.
arXiv preprint arXiv:2108.12581.
Figura, M., Kosaraju, K. C., and Gupta, V. (2021). Ad-
versarial attacks in consensus-based multi-agent rein-
forcement learning. In 2021 American Control Con-
ference (ACC), pages 3050–3055. IEEE.
Foerster, J., Chen, R. Y., Al-Shedivat, M., Whiteson, S.,
Abbeel, P., and Mordatch, I. (2018). Learning with
opponent-learning awareness. In Proceedings of the
17th International Conference on Autonomous Agents
and MultiAgent Systems, page 122–130.
Han, Y., Lu, W., and Chen, T. (2013). Cluster consensus
in discrete-time networks of multiagents with inter-
cluster nonidentical inputs. IEEE Transactions on
Neural Networks and Learning Systems, 24(4):566–
578.
Hostallero, D. E., Kim, D., Moon, S., Son, K., Kang, W. J.,
and Yi, Y. (2020). Inducing cooperation through re-
ward reshaping based on peer evaluations in deep
multi-agent reinforcement learning. In Proceedings
of the 19th International Conference on Autonomous
Agents and MultiAgent Systems, pages 520–528.
Jaques, N., Lazaridou, A., Hughes, E., Gulcehre, C., Or-
tega, P., Strouse, D., Leibo, J. Z., and De Freitas, N.
(2019). Social influence as intrinsic motivation for
multi-agent deep reinforcement learning. In Interna-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
42

tional conference on machine learning, pages 3040–
3049. PMLR.
Kim, Y. G., Lee, S., Son, J., Bae, H., and Do Chung, B.
(2020). Multi-agent system and reinforcement learn-
ing approach for distributed intelligence in a flexible
smart manufacturing system. Journal of Manufactur-
ing Systems, 57:440–450.
K
¨
olle, M., Matheis, T., Altmann, P., and Schmid, K. (2023).
Learning to participate through trading of reward
shares. In Proceedings of the 15th International Con-
ference on Agents and Artificial Intelligence, ICAART
’23, pages 355–362. SciTePress.
Kuhnle, A., Richley, J., and Perez-Lavin, D. (2023).
Learning strategic value and cooperation in multi-
player stochastic games through side payments. arXiv
preprint arXiv:2303.05307.
Lashkari, B. and Musilek, P. (2021). A comprehensive re-
view of blockchain consensus mechanisms. IEEE Ac-
cess, 9:43620–43652.
Laurent, G. J., Matignon, L., Fort-Piat, L., et al. (2011). The
world of independent learners is not markovian. Inter-
national Journal of Knowledge-based and Intelligent
Engineering Systems, 15(1):55–64.
Leibo, J. Z., Zambaldi, V., Lanctot, M., Marecki, J., and
Graepel, T. (2017). Multi-agent reinforcement learn-
ing in sequential social dilemmas. In Proceedings of
the 16th Conference on Autonomous Agents and Mul-
tiAgent Systems, pages 464–473.
Lerer, A. and Peysakhovich, A. (2017). Maintaining coop-
eration in complex social dilemmas using deep rein-
forcement learning. arXiv preprint arXiv:1707.01068.
Letcher, A., Foerster, J., Balduzzi, D., Rockt
¨
aschel, T., and
Whiteson, S. (2019). Stable opponent shaping in dif-
ferentiable games. In International Conference on
Learning Representations.
Li, Q., Cascudo, I., and Christensen, M. G. (2019). Privacy-
preserving distributed average consensus based on ad-
ditive secret sharing. In 2019 27th European Signal
Processing Conference (EUSIPCO), pages 1–5. IEEE.
Li, Y. and Tan, C. (2019). A survey of the consensus for
multi-agent systems. Systems Science & Control En-
gineering, 7:468 – 482.
Littman, M. L. (2001). Value-function reinforcement learn-
ing in markov games. Cognitive systems research,
2(1):55–66.
Lupu, A. and Precup, D. (2020). Gifting in multi-agent
reinforcement learning. In Proceedings of the 19th
International Conference on autonomous agents and
multiagent systems, pages 789–797.
Merhej, R. and Chetouani, M. (2021). Lief: Learning to in-
fluence through evaluative feedback. In Adaptive and
Learning Agents Workshop (AAMAS 2021).
Monrat, A. A., Schel
´
en, O., and Andersson, K. (2019). A
survey of blockchain from the perspectives of appli-
cations, challenges, and opportunities. IEEE Access,
7:117134–117151.
No
¨
e, R. (2006). Cooperation experiments: coordination
through communication versus acting apart together.
Animal behaviour, 71(1):1–18.
Olfati-Saber, R. and Shamma, J. S. (2005). Consensus fil-
ters for sensor networks and distributed sensor fusion.
In Proceedings of the 44th IEEE Conference on Deci-
sion and Control, pages 6698–6703. IEEE.
Omitaomu, O. A. and Niu, H. (2021). Artificial intelligence
techniques in smart grid: A survey. Smart Cities,
4(2):548–568.
Perolat, J., Leibo, J. Z., Zambaldi, V., Beattie, C., Tuyls, K.,
and Graepel, T. (2017). A multi-agent reinforcement
learning model of common-pool resource appropria-
tion.
Phan, T., Ritz, F., Belzner, L., Altmann, P., Gabor, T., and
Linnhoff-Popien, C. (2021). Vast: Value function fac-
torization with variable agent sub-teams. In Advances
in Neural Information Processing Systems, NeurIPS
’21, pages 24018–24032. Curran Associates, Inc.
Phan, T., Sommer, F., Altmann, P., Ritz, F., Belzner, L.,
and Linnhoff-Popien, C. (2022). Emergent coop-
eration from mutual acknowledgment exchange. In
Proceedings of the 21st International Conference on
Autonomous Agents and Multiagent Systems, pages
1047–1055.
Phan, T., Sommer, F., Ritz, F., Altmann, P., N
¨
ußlein,
J., K
¨
olle, M., Belzner, L., and Linnhoff-Popien, C.
(2024). Emergent cooperation from mutual acknowl-
edgment exchange in multi-agent reinforcement learn-
ing. Autonomous Agents and Multi-Agent Systems,
38(34).
Qureshi, K. N. and Abdullah, A. H. (2013). A survey on in-
telligent transportation systems. Middle-East Journal
of Scientific Research, 15(5):629–642.
Rashid, T., Samvelyan, M., De Witt, C. S., Farquhar, G., Fo-
erster, J., and Whiteson, S. (2020). Monotonic value
function factorisation for deep multi-agent reinforce-
ment learning. The Journal of Machine Learning Re-
search, 21(1):7234–7284.
Russell, S. J. (2010). Artificial intelligence a modern ap-
proach. Pearson Education, Inc.
Salimitari, M. and Chatterjee, M. (2018). A survey on con-
sensus protocols in blockchain for iot networks. arXiv
preprint arXiv:1809.05613.
Sandholm, T. W. and Crites, R. H. (1996). Multiagent rein-
forcement learning in the iterated prisoner’s dilemma.
Biosystems, 37(1-2):147–166.
Schenato, L. and Gamba, G. (2007). A distributed consen-
sus protocol for clock synchronization in wireless sen-
sor network. In 2007 46th ieee conference on decision
and control, pages 2289–2294. IEEE.
Sunehag, P., Lever, G., Gruslys, A., Czarnecki, W. M.,
Zambaldi, V., Jaderberg, M., Lanctot, M., Sonnerat,
N., Leibo, J. Z., Tuyls, K., and Graepel, T. (2018).
Value-decomposition networks for cooperative multi-
agent learning based on team reward. In Proceedings
of the 17th International Conference on Autonomous
Agents and MultiAgent Systems, page 2085–2087.
Tawalbeh, L., Muheidat, F., Tawalbeh, M., and Quwaider,
M. (2020). Iot privacy and security: Challenges and
solutions. Applied Sciences, 10(12):4102.
Wang, J. X., Hughes, E., Fernando, C., Czarnecki, W. M.,
Du
´
e
˜
nez Guzm
´
an, E. A., and Leibo, J. Z. (2019).
MEDIATE: Mutually Endorsed Distributed Incentive Acknowledgment Token Exchange
43
Evolving intrinsic motivations for altruistic behavior.
In Proceedings of the 18th International Conference
on Autonomous Agents and MultiAgent Systems, page
683–692.
Yang, J., Li, A., Farajtabar, M., Sunehag, P., Hughes, E.,
and Zha, H. (2020). Learning to incentivize other
learning agents. Advances in Neural Information Pro-
cessing Systems, 33:15208–15219.
Yi, Y., Li, G., Wang, Y., and Lu, Z. (2021). Learning to
share in multi-agent reinforcement learning. arXiv
preprint arXiv:2112.08702.
Yu, W., Chen, G., Wang, Z., and Yang, W. (2009). Dis-
tributed consensus filtering in sensor networks. IEEE
Transactions on Systems, Man, and Cybernetics, Part
B (Cybernetics), 39(6):1568–1577.
APPENDIX
Iterated Prisoner’s Dilemma. The Iterated Pris-
oner’s Dilemma (IPD) is the repeated game of the Pris-
oner’s Dilemma, depicted in Table 2. At each time step, the
two players must choose between cooperation and defection
to maximize their payoff (Axelrod, 1980; Hostallero et al.,
2020). Mutual defection constitutes a Nash equilibrium. If
both agents defect, no agent is incentivized to change its
strategy to cooperation in the next step if the other agent re-
mains a defector. If both agents switched their strategy to
cooperate, both would receive a lower penalty.
Table 2: Prisoner’s Dilemma reward allocation. Each cell
contains the respective payoffs for each of the two players
based on their choice of cooperation or defection.
Cooperate Defect
Cooperate (-1,-1) (-3,0)
Defect (0,-3) (-2,-2)
(a) CG-2 (b) CG-4 (c) CG-6
(d) Harvest (6 agents)
Figure 6: Evaluation Environments
Coin Game. Coins or Coin Game is an SSD conceptual-
ized by Lerer and Peysakhovich (2017). The CoinGame-N
comprises N ∈ {2, 4, 6} agents on a 3x3, 5x5, and 7x7
grid respectively (cf. Figs. 6a-6b). A distinct color iden-
tifies each agent. Initially, all N agents and one random-
colored coin spawn at random positions. The color of the
coin matches one of the agents. An agent can distinguish
whether the coin matches its own color or not. The action
space of each agent comprises four directions of movement
A ∈ {left, right, up, down}. A coin is collected when
an agent moves to its position. The environment discards
actions violating its bounds. If an agent collects any coin,
it receives a reward of +1. If the color matches a different
agent, that agent is penalized with −2. If multiple agents
collect a coin simultaneously, the matching agent receives a
penalty of −1. Once a coin is collected, a new coin spawns.
To evaluate varying reward scales, we added the Rescaled
Coin Game-2 variation with downsized rewards (i.e., scaled
by 0.1), such that the positive reward becomes +0.1 and
the penalty weighs −0.2. The ratio between reward and
penalty remains unchanged. Self-interested agents will col-
lect all coins regardless of color since this strategy imposes
only positive rewards on themselves. The Nash equilibrium
is reached if all agents follow this strategy since refraining
from collecting other agents’ coins only reduces an agent’s
own rewards without mitigating the penalties incurred from
the actions of other agents. However, if all agents collect
their own coins, each agent profits from the reduced penal-
ties, and social welfare can be maximized. To measure the
level of strategic cooperation in this domain, we evaluate
the rate of own coins w.r.t. to the total of collected coins.
Harvest. The Commons game is conceptualized by Per-
olat et al. (2017) and adapted by Phan et al. (2022), where
it is named Harvest. In Harvest, agents move on a 25x9-
sized grid to collect apples. The Harvest grid, including the
fixed positioning of the apples, is displayed in Fig. 6d. Ap-
ples have a regrowth rate, which depends on the number of
existing apples in the local area. More apples in the area
cause a higher regrowth rate of collected apples. If no ap-
ples remain in the area, no apples regrow. Self-interested
agents maximize their own apple harvest, but in a MAS,
agents have to refrain from simultaneous apple collection
to avoid the ultimate depletion of resources (the tragedy of
the commons). This requirement is the Nash equilibrium
of Harvest, as a single agent can not improve its rewards
by refraining from apple collection when other agents will
continue to diminish the resources. Only if all agents co-
operate they can maximize their long-term rewards. Agents
can tag other agents to remove them from the game for 25
time steps. (Perolat et al., 2017). In addition to a positive
reward of +1 for an apple harvest, each time step poses a
time penalty of −0.1. Furthermore, agents only have access
to a partial observation surrounding their position. Agents
can only communicate with agents in their neighborhood
in an area of 7x7 tiles. In addition to moving in four di-
rections (as for the coin game), the action space comprises
four actions to tag all neighbor agents in the four directions.
Moving toward a boundary results in no movement. Only
one agent can harvest an apple or tag another agent at a time.
The order of actions at each time step is random.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
44
