
Robust Autocorrelation for Period Detection in Time Series
Zhi Yang, Likun Hou and Xing Zhao
SAP HANA, SAP Labs China, 1001 Chenghui Road, Shanghai, China
Keywords:
Robust Autocorrelation, MAD Filter, Period Detection, Time Series, Outlier.
Abstract:
Autocorrelation is a key tool in time series period detection, but its sensitivity to outliers is a significant
limitation. This paper introduces a robust autocorrelation method for period detection that minimizes the
influence of outliers. By incorporating a moving average and applying a Median Absolute Deviation (MAD)
filter to each cycle-subseries, we significantly enhance the robustness of the autocorrelation to outliers. The
MAD filter identifies and corrects outliers in the cycle-subseries, based on the assumption that the cycle-
subseries consists of a constant plus Gaussian noise. This innovative robust autocorrelation can effectively
replace traditional autocorrelation in existing period detection algorithms. Additionally, we propose a new
algorithm that leverages our robust autocorrelation. Both theoretical analysis and empirical tests on real-world
and synthetic datasets indicate that period detection algorithms using our proposed robust autocorrelation
outperform those using traditional autocorrelation. Furthermore, our proposed algorithm surpasses all other
existing algorithms in comparison.
1 INTRODUCTION
A time series is considered periodic if a certain pattern
repeats at regular intervals of time. Periodicity can
occur due to natural phenomena, such as changes in
temperature or seasonal fluctuations in product sales,
or due to human activities, such as electricity usage
or traffic flows. The causes of periodicity are often
clear, and the periods are typically daily, weekly or
yearly. However, there are also many time series that
are related to other phenomena, and detecting peri-
odicity can be challenging, particularly when there is
limited information available. Nevertheless, the abil-
ity to identify the period of a time series is essential
for data analysis and forecasting.
In real-world datasets, outliers are a common oc-
currence. In time series data, an outlier is a data point
that deviates significantly from the general behavior
of the remaining data points. Outliers can have var-
ious causes, including data entry errors, experimen-
tal errors, sampling errors, and natural outliers. They
can significantly impact the results of data analysis
and forecasting, such as period detection. Outliers
can affect traditional autocorrelation and, therefore,
influence the detection of periods. Inaccurate period
detection of time series can result from outliers.
The existing period detection algorithms of time
series can be classified into three groups:1) frequency
domain methods that rely on the periodogram af-
ter Fourier transform, such as Hyndman’s findfre-
quency (Hyndman, 2023), Fisher’s test (Fisher, 1929;
Wichert et al., 2004) and Lomb-Scargle (Hu et al.,
2014; Glynn et al., 2006; Lomb, 1976); 2) time do-
main methods that rely on autocorrelation function
(ACF), such as seasonality test in Predictive Analy-
sis Library (PAL) of SAP HANA (SAP, 2024), me-
dian distance of autocorrelation function peaks (ACF-
Med) as well as methods proposed in (Wang et al.,
2005; Breitenbach et al., 2023); 3) methods that com-
bine periodogram and autocorrelation, such as AU-
TOPERIOD (Vlachos et al., 2005; Puech et al., 2020),
SAZED (Toller et al., 2019) and methods proposed
in (Parthasarathy et al., 2006; Wen et al., 2023; Wen
et al., 2021). However, most of these algorithms are
not robust to outliers. The algorithms presented in
(Wen et al., 2023; Wen et al., 2021) claim to be ro-
bust to outliers, and we will include their results in
the comparison.
In this work, we propose a novel autocorrelation
method that demonstrates high robustness to outliers,
thereby enhancing the reliability of period detection
algorithms. For every lag h, we detrend the time series
using a moving avarage with window size h, followed
by the application of a Median Absolute Deviation
(MAD) filter on each cycle-subseries to identify and
correct outliers. The MAD filter, a non-local filter,
36
Yang, Z., Hou, L. and Zhao, X.
Robust Autocorrelation for Period Detection in Time Series.
DOI: 10.5220/0013092500003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 2, pages 36-44
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
detects and adjusts datapoints in the cycle-subseries
that fall outside the range of 3 MAD. Our proposed
autocorrelation method can effectively replace tradi-
tional autocorrelation techniques used in period de-
tection algorithms, significantly enhancing their re-
silience to outliers. This improvement benefits algo-
rithms such as ACF-Med, AUTOPERIOD, SAZED,
and PAL’s seasonality test. Furthermore, we present
a novel algorithm that utilizes the proposed autocor-
relation, showcasing superior performance compared
to the aforementioned algorithms. Our approach in-
volves performing peak analysis on the proposed au-
tocorrelation. Although the source code for the algo-
rithms introduced in (Wen et al., 2023; Wen et al.,
2021) is not publicly available, our new algorithm
achieves better results than those reported in (Wen
et al., 2023; Wen et al., 2021) when evaluated on the
CRAN dataset (Hyndman and Killick, 2023), despite
the previous algorithms also claiming robustness to
outliers.
Robust period detection plays a vital role in many
real-world applications. One such application is the
decomposition of time series with unknown peri-
ods using robust methods like STL (Cleveland et al.,
1990), where robust period detection is essential. Ad-
ditionally, in the context of time series outlier detec-
tion discussed in (Gao et al., 2020), robust period de-
tection serves as an indispensable step. Numerous
other applications that involve robust period detection
can be found in (Tolas et al., 2021; Zhang et al., 2022;
Wang et al., 2006; Vlachos et al., 2004).
The remainder of this paper is organized as fol-
lows: Section 2 delves into a detailed discussion of
the proposed autocorrelation and provides an illustra-
tive example. In Section 3, we present the experimen-
tal results obtained from public algorithms, where tra-
ditional autocorrelation has been substituted with pro-
posed autocorrelation. Section 4 introduces our novel
period detection algorithm and discusses the corre-
sponding experiments and ablation studies. Finally,
our conclusions are presented in Section 5.
To facilitate readers of interest, we summarize a
list of abbreviations which are frequently used in this
paper in Table 1.
2 PROPOSED
AUTOCORRELATION
2.1 Proposed ACF Formula
Autocorrelation is a fundamental tool used to de-
tect the period of a time series. Given a time series
x
x
x = {x
i
|i = 0,1,··· ,N − 1} with N data points, the
Table 1: List of Abbreviations.
Abbreviation Description
M-MA ACF
ACF of time series detrended by moving average and fil-
tered by MAD filter on every cycle-subseries.
MA ACF ACF of time series detrended by moving average
M-RAW ACF ACF of original time series filtered by MAD filter on every
cycle-subseries.
RAW ACF ACF of original time series
LPA left peak analysis
ACF-LPA left peak analysis on ACF
X ACF-LPA left peak analysis on X ACF. X can be M-MA, MA, M-
RAW and RAW.
autocorrelation function (ACF) of lag h is defined as:
γ
h
= c
h
/c
0
, (1)
where c
h
is the autocovariance function at lag h. The
definition of c
h
is
c
h
=
1
N
N−h−1
∑
t=0
(x
t
− ¯x)(x
t+h
− ¯x), (2)
where ¯x is the mean of the time series. The value of γ
h
is in the range of -1 to 1, with a larger value indicating
more relevance. For a time series with N elements, γ
h
is defined with h = 0, 1, · · · ,N − 1.
To address the limitation of the above traditional
ACF’s sensitivity to outliers, we propose a robust
ACF, as illustrated in Figure 1.
Figure 1: The process for computing proposed ACF.
The first step involves obtaining the detrended
time series through a moving average. Similar to
the weighted moving average discussed in (Hyndman,
2018) and the moving average used in PAL’s seasonal-
ity test (SAP, 2024), the trend time series m
m
m
h
h
h
is deter-
mined by taking the moving average of window size
h for a given time series x
x
x and lag h, as shown in (3)
and (4),
m
h
i
=
1
2q + 1
q
∑
j=−q
x
i+ j
, h = 2q + 1
1
2q
X
i
, h = 2q
(3)
X
i
= 0.5x
i−q
+
q−1
∑
j=−q+1
x
i+ j
+ 0.5x
i+q
(4)
where i = 0,1,··· ,N −1. In (3) and (4), if i−q < 0 or
i + j < 0, x
i−q
or x
i+ j
is replaced by x
0
. Conversely, if
i + q > N −1 or i+ j > N −1, x
i+q
or x
i+ j
is replaced
by x
N−1
. This ensures the trend time series m
m
m
h
h
h
retains
the length N. The detrended time series y
y
y
h
h
h
is then
obtained by y
y
y
h
h
h
= x
x
x − m
m
m
h
h
h
.
Robust Autocorrelation for Period Detection in Time Series
37

It is important to note that the window size must
be the same as the lag at this step. When the actual
period is the same as the lag h in this case, the pe-
riodicity is reinforced after removing the trend using
the moving average. However, if h is smaller than the
actual period, the periodicity of the detrended time
series is reduced, resulting in a low ACF for lag h.
When h is a little larger than the actual period, the
seasonal part is also emphasized in the detrended time
series. Nonetheless, the ACF for lag h is lower than
the ACF of the actual period due to the ACF formula
(1) and (2). As the lag h increases, more of the trend
component is included in the detrended time series.
The second step involves the cycle-subseries
MAD filter in the detrended time series y
y
y
h
h
h
. The MAD
filter is a non-local filter based on MAD method. It
detects and adjusts datapoints in the cycle-subseries
that fall outside the range of 3 MAD. It is inspired
by the cycle-subseries smoothing and filtering proce-
dures in STL decomposition (Cleveland et al., 1990)
and the non-local means algorithm used in image
denoising (Buades et al., 2005). For each lag h,
we generate h cycle-subseries. Given the i-th cycle-
subseries z
z
z
i,h
= {y
i+kh
|k ≥ 0, i + kh < N}, we denote
z
i,h
k
= y
i+kh
. Let
ˆz
i,h
= median(z
z
z
i,h
) (5)
d
i,h
k
= |z
i,h
k
− ˆz
i,h
|, (6)
mad
i,h
= median(d
d
d
i,h
). (7)
Then, we calculate the MAD score of each point in
z
z
z
i,h
. The MAD score is defined as follows:
s
i,h
k
= 0.67449 ·
z
i,h
k
− ˆz
i,h
mad
i,h
. (8)
The coefficient 0.67449 is used to make the MAD
score equivalent to the Z score when the data follows
a Gaussian distribution. After applying the MAD fil-
ter, the filtered cycle-subseries is as follows:
˜z
i,h
k
=
ˆz
i,h
− 3/0.67449 · mad
i,h
, s
i,h
k
< −3
z
i,h
k
, −3 ≤ s
i,h
k
≤ 3
ˆz
i,h
+ 3/0.67449 · mad
i,h
, s
i,h
k
> 3
(9)
Let us put the cycle-subseries back to the whole
time series. After applying the cycle-subseries MAD
filter to all cycle-subseries, we get the filtered whole
time series
˜
y
y
y
h
h
h
as ˜y
h
i+kh
= ˜z
i,h
k
.
This approach involves outlier detection using the
MAD score, detecting and correcting outliers accord-
ing to the 3 MAD rule. We assume that the seasonal
component satisfies S
i
= S
i+T
. When the lag h is the
actual period or the integer multiples of the actual pe-
riod, the cycle-subseries satisfy z
i,h
k
= a
i,h
+ ε
k
, where
ε
k
follows a Gaussian distribution with zero mean,
and a
i,h
is a constant. In this scenario, the MAD
filter can accurately detect outliers within the cycle-
subseries. The 3 MAD rule effectively detects and
corrects these outliers, thereby making the ACF ro-
bust to outliers.
When the lag h is neither the actual period nor
an integer multiple of the actual period, the cycle-
subseries do not satisfy z
i,h
k
= a
i,h
+ε
k
. Consequently,
the effectiveness of outlier detection and correction is
diminished compared to the previous case. This re-
sults in a smaller increase in the ACF than when the
lag h aligns with the actual period or its integer mul-
tiples.
The final step involves calculating the proposed
ACF using the time series after detrending and ap-
plying the cycle-subseries MAD filter, denoted as
˜
y
y
y
h
h
h
.
Similar to the traditional ACF, the proposed ACF at
lag h is defined as
˜
γ
h
= ˜c
h
/ ˜c
0
, where ˜c
h
is
˜c
h
=
1
N
N−h−1
∑
i=0
( ˜y
h
i
− ˜y
h
)( ˜y
h
i+h
− ˜y
h
), (10)
where ˜y
h
is the mean of the detrended time series
˜
y
y
y
h
h
h
.
The complexity of calculating the proposed ACF for
each lag is O(N), leading to a total complexity of
O(N
2
) if the number of lags for autocorrelation scales
with N. It’s worth noting that the proposed ACFs
across different lags can be computed in parallel.
2.2 An Illustrative Example
In this subsection, we will evaluate the proposed ro-
bust ACF with cycle-subseries MAD filter using a
simple case. To assess its robustness to outliers and
perform an ablation study, we construct four types of
ACFs based on the procedures outlined in Figure 1.
The proposed robust ACF depicted there is referred to
as M-MA ACF. If we omit the detrending process and
apply the cycle-subseries MAD filter on the original
time series, this version of ACF is termed M-RAW
ACF. When MAD filter is removed and the ACF is
calculated from the detrended time series, it is called
MA ACF. Finally, if both detrending and MAD filter
are removed, and the ACF is computed using the orig-
inal time series, we refer to it as RAW ACF. For our
analysis, we employ motion data from CRAN dataset
(Hyndman and Killick, 2023), which is monthly and
has a period of 12, with a total length of 192. This
data is illustrated in Figure 2a. The four ACFs of the
motion data, with lags ranging from 2 to 96, are pre-
sented in Figure 3a. It is evident that both M-MA
ACF and MA ACF exhibit a strong periodicity of 12.
M-RAW ACF and RAW ACF, however, show a de-
clining trend and reach maximum ACF at lag = 2,
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
38
rather than 12. This occurs due to the presence of
a trend in the motion data and the absence of the de-
trending process in M-RAW ACF and RAW ACF.
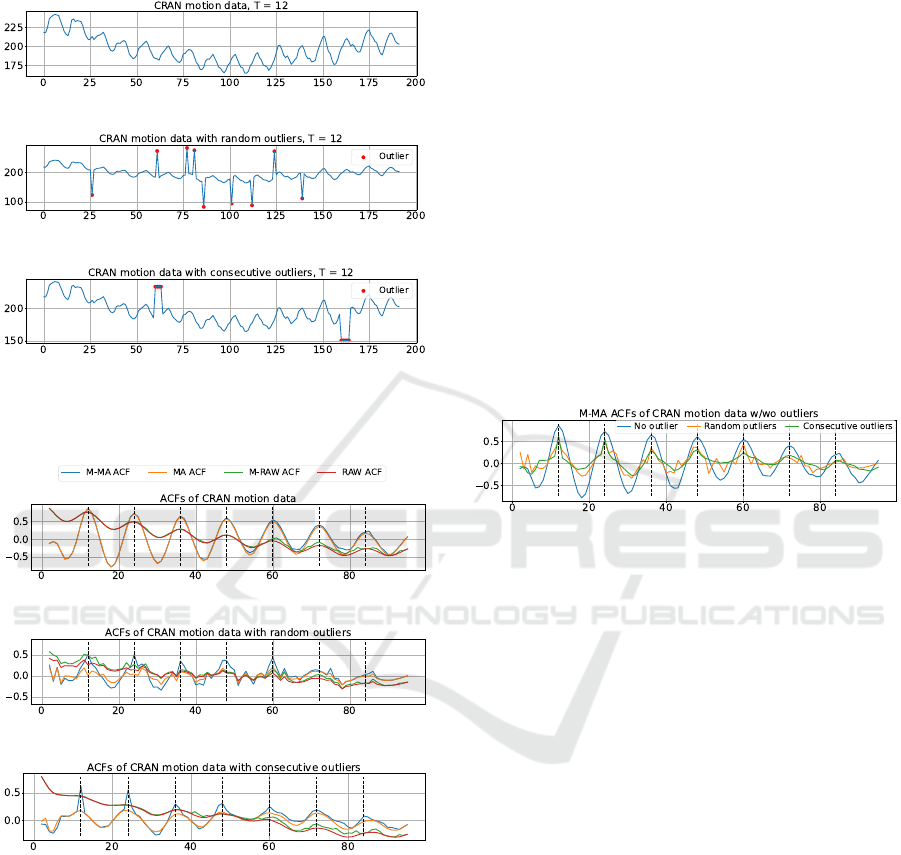
(a) CRAN motion data, T = 12
(b) CRAN motion data with 9 random outliers, T = 12
(c) CRAN motion data with 9 consecutive outliers, T = 12
Figure 2: CRAN motion data without outlier, with random
outliers and with consecutive outliers.
(a) ACFs of CRAN motion data without outlier
(b) ACFs of CRAN motion data with 9 random outliers
(c) ACFs of CRAN motion data with 9 consecutive outliers
Figure 3: ACFs of CRAN motion data without outlier, with
random outliers and with consecutive outliers.
Now let us introduce random outliers into the mo-
tion data. We insert 9 outliers with an amplitude five
times the standard deviation of the original time se-
ries. The corresponding outlier ratio is 0.05. The
outlier-infused motion data is displayed in Figure 2b.
The four ACFs of outlier-infused motion data are de-
picted in Figure 3b. It’s evident that the M-MA ACF
retains a strong periodicity of 12. For other ACFs, the
periodicity of 12 is not obvious.
One might question the apparent outliers in Figure
2b, suggesting that local smoothing or range detection
algorithms could easily identify them. Let’s now con-
sider consecutive outliers in the motion data, which
prove more challenging to detect. Figure 2c shows
motion data with these consecutive outliers, nine in
total, divided into two sections. The four ACFs of
motion data with consecutive outliers are depicted in
Figure 3c. The periodicity of 12 remains evident in
the M-MA ACF and MA ACF. However, the values
of the MA ACF are significantly reduced, peaking at
less than 0.2, with the maximum value taken at a lag
of 24 rather than 12. This periodicity of 12 becomes
less clear in the M-RAW ACF and RAW ACF.
Let’s now compare the M-MA ACFs of motion
data with and without outliers, as depicted in Figure
4. We observe that all instances exhibit a strong pe-
riodicity of 12, with comparable peak values. This
analysis demonstrates the robustness of M-MA ACFs
to outliers, including random, consecutive, and hard-
to-detect outliers.
Figure 4: M-MA ACF of CRAN motion data without out-
lier, with random outliers and with consecutive outliers.
3 EXPERIMENTS ON PUBLIC
ALGORITHMS WITH
PROPOSED ACF
3.1 Algorithms and Datasets
We explore period detection algorithms utilizing ACF,
substituting it with the four ACFs detailed in Section
2.2. These algorithms include PAL’s seasonality test,
ACF-Med, AUTOPERIOD, and SAZED. The origi-
nal ACF in SAZED is a 10-fold autocorrelation, as
outlined in (Toller et al., 2020).
PAL’s seasonality test computes the ACF from lag
= 2 up to half the series length, selecting the max-
imum ACF value. If this maximum ACF exceeds
the threshold (default is 0.2, which we use in sub-
sequent sections), the corresponding lag is consid-
ered as the period. If not, the series is deemed non-
periodic. We utilize the AUTOPERIOD implemen-
tation from (Schmidl, 2023) and the SAZED imple-
mentation from (Toller et al., 2020) in R studio.
For our datasets, we use the publicly available,
single-period time series data from CRAN, also ref-
Robust Autocorrelation for Period Detection in Time Series
39
erenced in (Toller et al., 2019). This data, sourced
from the “Time Series Data” section of “CRAN Task
View: Time Series Analysis” (Hyndman and Killick,
2023), comprises 82 time series, each labeled with its
corresponding period. Series lengths vary from 16 to
3024, with periods ranging from 2 to 52. Figure 2a
shows a time series from the CRAN dataset.
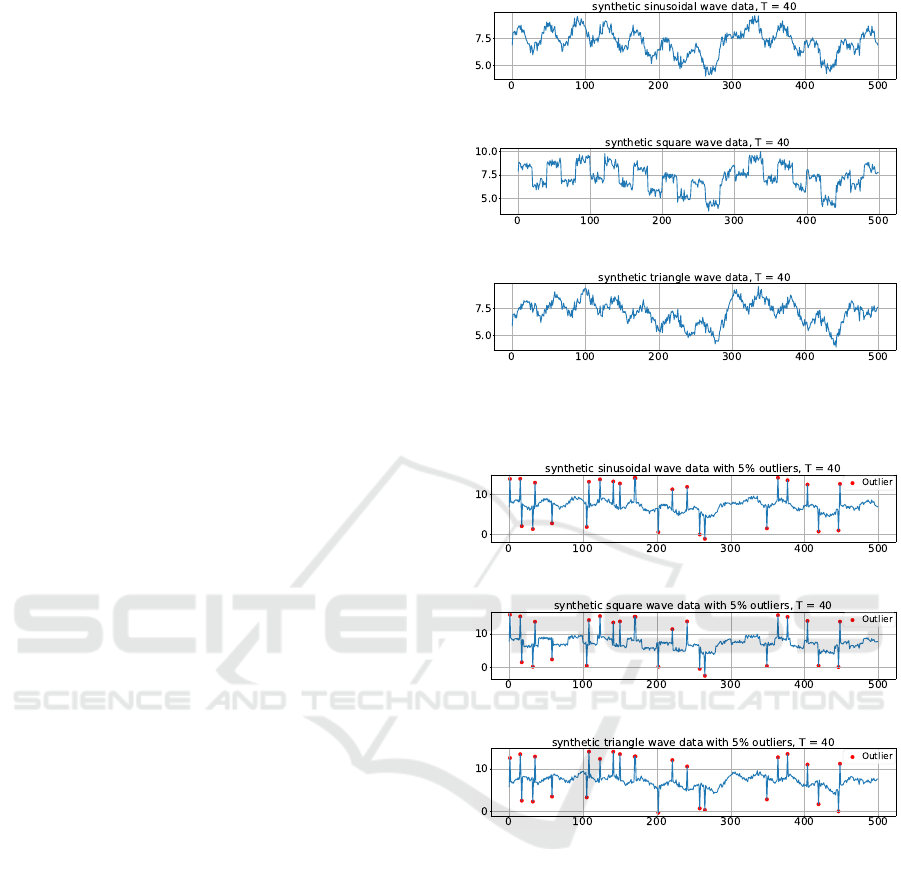
In addition, we generate 3000 synthetic time se-
ries, each of length 500, without outliers. Each se-
ries includes a piecewise linear trend, additive white
Gaussian noise (variance = 0.1), and a periodic com-
ponent with amplitude 1 and period between 10 to
50. We explore three periodic patterns: sinusoidal,
square, and triangular waves, with each pattern rep-
resented in 1000 series. Figure 5 shows examples of
sine wave data, square wave data, and triangle wave
data, all without outliers.
We also introduce outliers to both the CRAN and
synthetic datasets, with an amplitude five times the
standard deviation of the original time series. In (Wen
et al., 2023), the same outlier amplitude was also em-
ployed. For most real-world examples, an outlier that
exceeds five times the standard deviation is consid-
ered sufficiently large. Large outliers have a signifi-
cant impact on periodicity detection. We aim to evalu-
ate the performance of the proposed ACF in handling
data with large outliers, as well as normal data. We set
the outlier ratio (OR) at 0.01, 0.03, or 0.05. Like (Wen
et al., 2023), since the outlier ratio is usually small in
real world, we limit the outlier ratio to a maximum of
0.05. For instance, the motion data depicted in Figure
2b with an OR of 0.05 represents a CRAN time series
with outliers. Similarly, Figure 6 illustrates examples
of sine wave data, square wave data, and triangle wave
data, each containing 5% outliers.
3.2 Experimental Results
Similar to (Wen et al., 2023; Wen et al., 2021), the
precision of every algorithm is calculated by the ratio
of the number of time series with correctly estimated
period length to the total number of time series. Ta-
ble 2 presents results from various algorithms based
on ACFs, applied to the CRAN dataset. For the un-
modified CRAN dataset, M-MA ACF and MA ACF
demonstrate comparable performance. However, in
the presence of outliers, M-MA ACF surpasses other
ACFs in algorithms PAL’s seasonality test, ACF-Med,
and SAZED. For AUTOPERIOD, the performances
of the four ACFs are similar, due to the reliance on pe-
riod hints provided by the periodogram method. This
method, however, underperforms due to the complex
trend in the CRAN dataset.
For the synthetic datasets, the findings are out-
(a) An example of synthetic sinusoidal wave data, T = 40
(b) An example of synthetic square wave data, T = 40
(c) An example of synthetic triangle wave data, T = 40
Figure 5: Examples of synthetic wave data, from top to bot-
tom are sinusoidal wave, square wave, and triangle wave.
(a) An example of synthetic sinusoidal wave data with 5% outliers, T = 40
(b) An example of synthetic square wave data with 5% outliers, T = 40
(c) An example of synthetic triangle wave data with 5% outliers, T = 40
Figure 6: Examples of synthetic wave data with with 5%
outliers, from top to bottom are sinusoidal wave, square
wave, and triangle wave.
lined in Table 3, mirroring those from the CRAN
dataset. Without outliers, M-MA ACF and MA ACF
show similar performance. However, in the pres-
ence of outliers, M-MA ACF surpasses other ACFs
across all four algorithms, including AUTOPERIOD.
This superior performance is attributed to the piece-
wise linear trend in synthetic data, which is sim-
pler than CRAN, enabling the periodogram method
in AUTOPERIOD to perform better.
From our experiments on the CRAN and synthetic
datasets, we observed superior or equivalent perfor-
mance of M-MA ACF compared to other ACFs across
all tested algorithms. M-MA ACF significantly out-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
40

Table 2: Precision of public algorithms on CRAN dataset.
The best results among ACFs are highlighted in bold.
Algorithms ACFs OR = 0 OR = 0.01 OR = 0.03 OR = 0.05
PAL
RAW 0.415 0.390 0.402 0.232
M-RAW 0.402 0.402 0.378 0.341
MA 0.768 0.537 0.329 0.195
M-MA 0.805 0.793 0.634 0.500
ACF-Med
RAW 0.451 0.402 0.183 0.012
M-RAW 0.451 0.366 0.317 0.220
MA 0.671 0.354 0.085 0.012
M-MA 0.671 0.646 0.524 0.402
AUTOPERIOD
RAW 0.451 0.366 0.293 0.207
M-RAW 0.415 0.354 0.305 0.220
MA 0.439 0.354 0.305 0.183
M-MA 0.451 0.390 0.317 0.256
SAZED
10-fold 0.549 0.500 0.439 0.415
RAW 0.524 0.512 0.463 0.390
M-RAW 0.524 0.488 0.500 0.427
MA 0.598 0.537 0.476 0.439
M-MA 0.585 0.537 0.488 0.488
performs other ACFs in the presence of outliers, with
its advantage becoming increasingly apparent as the
number of outliers increases. M-MA ACF can en-
hance the performance of existing algorithms.
Based on our experiments, we observed that the
PAL with M-MA ACF performs exceptionally well
when the outlier ratio is either 0 or 0.01. However,
its performance degrades at outlier ratios of 0.03 or
0.05. We also noticed that the PAL with M-MA ACF
detects periods in the time series as integer multiples
of the actual period in certain instances. For instance,
a time series with a period of 12 might be identified
as having a period of 24. In the case of the CRAN
dataset, if we accept these integer multiples as correct
detections, the precision is 0.841, 0.854, 0.744, and
0.695 for outlier ratios of 0, 0.01, 0.03, and 0.05, re-
spectively. We will leverage this property to propose
a new algorithm in the following section.
4 PROPOSED PERIOD
DETECTION ALGORITHM
4.1 Algorithm Description
In PAL’s seasonality test, the period is identified as
the lag with the highest ACF. However, the lag with
the maximum ACF doesn’t always denote the period.
As discussed in Section 3.2, it could also represent
integer multiples of the period, particularly when out-
liers are present, and M-MA ACF is applied. In our
new algorithm, we locate the maximum M-MA ACF
of the time series at lag T
raw
, and conduct peak analy-
sis on ACFs with lags smaller than T
raw
. Graphically,
these ACFs are to the left of the maximum ACF. We
term this process as left peak analysis and our new
method as M-MA ACF-LPA. In the left peak analy-
sis, we consider all integer factors of T
raw
, excluding
1, and analyze them in ascending order. If an integer
factor and its multiples correspond to ACF peaks and
are greater than a certain threshold, that integer factor
is identified as the period.
The M-MA ACF-LPA procedure is detailed in Al-
gorithm 1. We compute M-MA ACFs for lags starting
from 2 and identify the maximum ACF and its corre-
sponding lag. Then, we sort all possible periods in
ascending order and validate them sequentially. Once
a possible period is validated, we deem it as the pe-
riod of the input time series and conclude the algo-
rithm. In Algorithm 1, we use 0.2 as the ACF thresh-
old to determine the presence of a periodic pattern.
This threshold value is consistent with the threshold
used in our previously discussed PAL’s seasonality
test. The higher this value, the stricter the criteria
for determining the presence of a periodic pattern. In
the left peak analysis, we use 0.7 times the maximum
ACF value as a threshold. This is because the ACF
of the true period and its integer multiples are both
peaks and are relatively large. It is reasonable to se-
lect a higher value as the threshold. If the threshold is
too low, there is a higher risk of misidentifying peri-
odicity, while a threshold that is too high may cause
us to overlook the true period. In the following ex-
periments, we utilize the threshold values specified in
Algorithm 1.
4.2 Experiments
The new algorithm, M-MA ACF-LPA, allows for in-
terchangeable ACF components, including MA ACF,
M-RAW ACF, and RAW ACF. These modifications
yield respective variants: MA ACF-LPA, M-RAW
ACF-LPA, and RAW ACF-LPA, which are collec-
tively referred to as ACF-LPA algorithms. This sub-
section presents an experimental comparison of these
four ACF-LPA variants, effectively serving as an ab-
lation study for the ACF component. By omitting
the left peak analysis, we get PAL’s seasonality test,
which serves as an ablation study for the LPA el-
ement. The performance of our algorithm will be
benchmarked against other widely used algorithms
such as Fisher’s Test, Lomb–Scargle Periodogram,
and findfrequency. For findfrequency, we use the
implementation (Hyndman, 2023) in R studio. Our
datasets include the real-world CRAN dataset and the
synthetic datasets detailed in Section 3.
The CRAN dataset results are shown in Table 4.
When juxtaposed with the results in Table 2, it’s evi-
dent that M-MA ACF-LPA matches the performance
of PAL with M-MA ACF, and surpasses all other al-
gorithms when the outlier ratio is 0 or 0.01. For out-
Robust Autocorrelation for Period Detection in Time Series
41

Table 3: Precision of public algorithms on synthetic datasets. The best results among ACFs are highlighted in bold.
Algorithms ACFs
Synthetic Sinusoidal Time Series Synthetic Square Time Series Synthetic Triangle Time Series
OR = 0 OR = 0.01 OR = 0.03 OR = 0.05 OR = 0 OR = 0.01 OR = 0.03 OR = 0.05 OR = 0 OR = 0.01 OR = 0.03 OR = 0.05
PAL
RAW 0.091 0.088 0.066 0.058 0.231 0.224 0.160 0.135 0.070 0.075 0.057 0.045
M-RAW 0.096 0.120 0.164 0.185 0.245 0.281 0.314 0.338 0.074 0.096 0.113 0.127
MA 0.778 0.263 0.091 0.048 0.978 0.715 0.268 0.126 0.714 0.222 0.064 0.029
M-MA 0.880 0.891 0.722 0.576 0.954 0.875 0.763 0.657 0.836 0.838 0.650 0.462
ACF-Med
RAW 0.378 0.159 0.031 0 0.780 0.410 0.068 0 0.318 0.104 0.022 0
M-RAW 0.338 0.164 0.151 0.168 0.719 0.428 0.317 0.315 0.269 0.126 0.111 0.130
MA 0.722 0.065 0.003 0 0.970 0.250 0.009 0 0.632 0.047 0.001 0
M-MA 0.758 0.744 0.706 0.457 0.975 0.879 0.877 0.809 0.706 0.702 0.496 0.233
AUTOPERIOD
RAW 0.273 0.239 0.148 0.094 0.792 0.668 0.373 0.245 0.236 0.188 0.104 0.065
M-RAW 0.302 0.332 0.325 0.297 0.748 0.634 0.539 0.479 0.255 0.272 0.237 0.213
MA 0.548 0.263 0.141 0.098 0.782 0.659 0.351 0.237 0.426 0.222 0.100 0.066
M-MA 0.607 0.641 0.568 0.496 0.787 0.774 0.725 0.686 0.476 0.493 0.410 0.338
SAZED
10-fold 0.273 0.239 0.148 0.094 0.792 0.668 0.373 0.245 0.236 0.188 0.104 0.065
RAW 0.353 0.319 0.249 0.253 0.440 0.393 0.331 0.306 0.303 0.261 0.217 0.212
M-RAW 0.356 0.328 0.261 0.266 0.444 0.409 0.326 0.320 0.295 0.260 0.214 0.210
MA 0.703 0.560 0.436 0.406 0.727 0.647 0.514 0.488 0.612 0.478 0.355 0.336
M-MA 0.683 0.607 0.498 0.503 0.686 0.651 0.533 0.541 0.619 0.526 0.464 0.435
Data: time series x
x
x = {x
i
|i = 0, 1, · · · ,N − 1}
Result: period
Calculate M-MA ACFs of lags from 2 to
N/2;
Take maximal ACF as acf max and its
corresponding lag as period raw;
if acf max < 0.2 then
return no period;
end
possible periods = all factors of period raw
except 1, in ascending sort. For example, if
period raw = 12, possible periods =
[2,3,4,6,12];
for pperiod in possible periods do
pperiods = all integer multiple of pperiod
and no larger than period raw. For
example, if pperiod = 3, pperiods =
[3,6,9,12];
if pperiods are all ACF peaks and their
coressponding ACFs are all larger than
0.7 · acf max then
return pperiod;
end
end
return period raw;
Algorithm 1: Process of M-MA ACF-LPA.
lier ratios of 0.03 or 0.05, M-MA ACF-LPA continues
to outperform all competitors.
We also benchmarked our results against the
methods in (Wen et al., 2023; Wen et al., 2021). How-
ever, as their source code was unavailable, we could
only compare our algorithms with the results pub-
lished in their papers. Their precision in the CRAN
dataset ranges from 0.60 to 0.63, and our precision
is 0.805. Our method significantly improves on these
figures. Regarding the CRAN dataset with outliers,
we don’t have their specific data but replicated out-
liers in the same manner. Their precision peaks at
0.62 and 0.60 for outlier ratios of 0.01 and 0.05. Our
M-MA ACF-LPA, however, achieves accuracy figures
of 0.793 and 0.622 for the same outlier ratios, outshin-
ing their results across all outlier conditions.
For the ACF component’s ablation study, we sub-
stituted M-MA ACF with MA-ACF, M-RAW ACF,
and RAW ACF. Without outliers, M-MA ACF per-
forms slightly worse than MA-ACF but remains com-
petitive. In the presence of outliers, M-MA ACF sig-
nificantly outperforms other ACFs, especially as the
outlier ratio increases. In the left peak analysis ab-
lation study, we contrasted our algorithm with PAL’s
seasonality using M-MA ACF. With outlier ratios of
0 or 0.01, our algorithm marginally underperforms
PAL, yet remains comparable. However, with outlier
ratios of 0.03 or 0.05, our algorithm clearly surpasses
PAL.
Table 4: Precision of ACF-LPA and other algorithms on
CRAN dataset. The best results are highlighted in bold.
Algorithms ACFs OR = 0 OR = 0.01 OR = 0.03 OR = 0.05
ACF-LPA
RAW 0.415 0.402 0.402 0.268
M-RAW 0.402 0.402 0.415 0.341
MA 0.768 0.561 0.354 0.195
M-MA 0.805 0.793 0.659 0.622
PAL M-MA 0.805 0.793 0.634 0.500
Fisher’s Test 0.390 0.366 0.293 0.220
Lomb–Scargle 0.549 0.537 0.488 0.402
findfrequency 0.451 0.378 0.268 0.171
The results for synthetic datasets, presented in
Table 5, mirror those of the CRAN dataset. When
the outlier ratio is zero, ACF-LPA employing M-MA
ACF yields results comparable to PAL’s seasonality
test with M-MA ACF or MA ACF, and surpasses
other algorithms. In the presence of outliers, our al-
gorithm exceeds the performance of all others.
In the ACF component ablation study, without
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
42
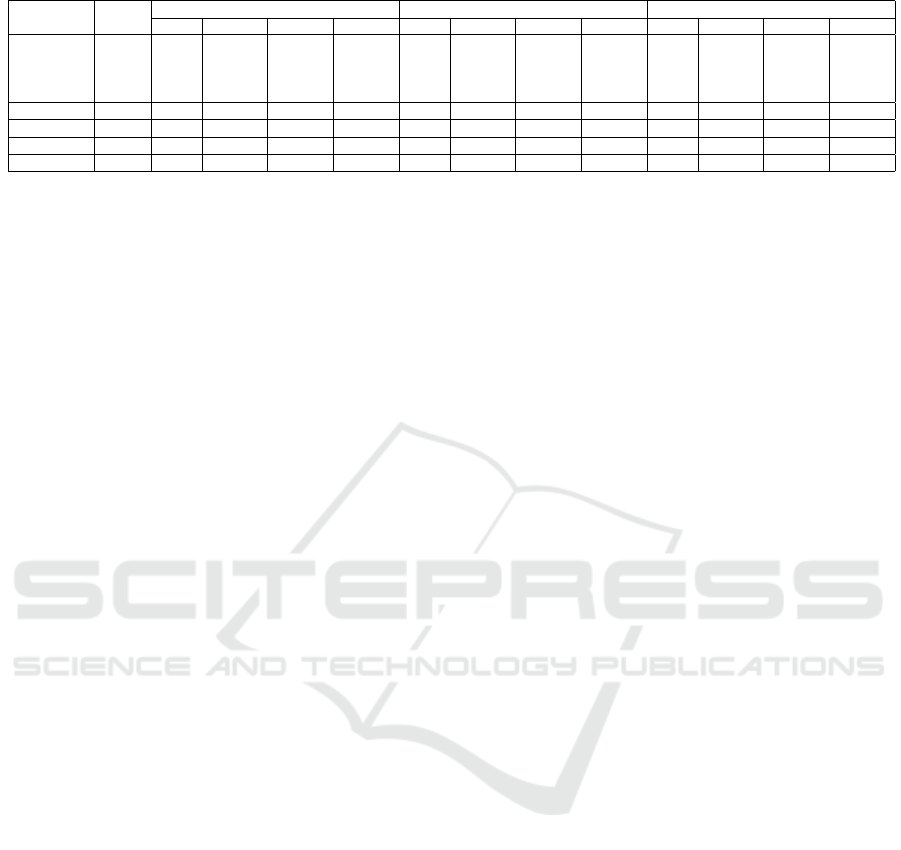
Table 5: Precision of ACF-LPA and other algorithms on synthetic datasets. The best results are highlighted in bold.
Algorithms ACFs
Synthetic Sinusoidal Time Series Synthetic Square Time Series Synthetic Triangle Time Series
OR = 0 OR = 0.01 OR = 0.03 OR = 0.05 OR = 0 OR = 0.01 OR = 0.03 OR = 0.05 OR = 0 OR = 0.01 OR = 0.03 OR = 0.05
ACF-LPA
RAW 0.091 0.090 0.068 0.062 0.235 0.233 0.178 0.153 0.071 0.077 0.059 0.047
M-RAW 0.096 0.120 0.164 0.182 0.250 0.288 0.322 0.343 0.075 0.097 0.113 0.134
MA 0.778 0.285 0.102 0.057 1.000 0.804 0.319 0.171 0.715 0.239 0.074 0.036
M-MA 0.881 0.935 0.922 0.862 0.998 0.993 0.992 0.985 0.841 0.903 0.852 0.724
PAL M-MA 0.880 0.891 0.722 0.576 0.954 0.875 0.763 0.657 0.836 0.838 0.650 0.462
Fisher’s Test 0.212 0.217 0.207 0.208 0.267 0.273 0.269 0.265 0.172 0.173 0.171 0.179
Lomb–Scargle 0.483 0.480 0.462 0.477 0.646 0.638 0.606 0.609 0.391 0.393 0.382 0.375
findfrequency 0.431 0.356 0.287 0.216 0.516 0.454 0.365 0.287 0.351 0.291 0.200 0.168
outliers, M-MA ACF performance slightly trails MA
ACF in synthetic square wave datasets, though it re-
mains competitive. However, for synthetic sinusoidal
and triangle wave datasets, M-MA ACF performs
best. When outliers are present, especially in larger
ratios, M-MA ACF significantly outperforms other
ACFs in accuracy. In the left peak analysis ablation
study, we juxtapose our algorithm with PAL’s sea-
sonality using M-MA ACF. Without outliers, our al-
gorithm holds its own against PAL. However, when
outliers are present, our algorithm outpaces PAL,
with the advantage becoming more pronounced as the
number of outliers increases.
The experimental results from both the CRAN and
synthetic datasets demonstrate that the M-MA ACF-
LPA algorithm outperforms or matches other algo-
rithms when no outliers are present. Furthermore, the
presence of outliers significantly enhances the superi-
ority of the M-MA ACF-LPA, with its advantage be-
coming increasingly evident as the number of outliers
increases.
5 CONCLUSIONS
In this paper, we present a novel robust autocorrela-
tion function, M-MA ACF, designed for period detec-
tion in time series data. This function, derived from
moving average and applying MAD filter to every
cycle-subseries, exhibits robustness against both iso-
lated and consecutive outliers. This robustness is sub-
stantiated through theoretical analysis and empirical
testing on both real-world and synthetic datasets. M-
MA ACF can enhance the performance of existing al-
gorithms like PAL’s seasonality test, ACF-Med, AU-
TOPERIOD, and SAZED. We also introduce a new
algorithm, M-MA ACF-LPA, that builds on M-MA
ACF and left peak analysis. Without outliers, the per-
formance of the M-MA ACF-LPA algorithm is on par
with or better than other algorithms in comparison.
The presence of outliers, however, accentuates its su-
periority, with its advantage increasing proportional
to the number of outliers. Although our proposed
ACFs have a complexity of O(N
2
), parallel compu-
tation can be deployed for process optimization. Be-
sides, our proposed ACF has the potential to improve
the accuracy of many existing algorithms, and thus
benefit various related applications.
REFERENCES
Breitenbach, T., Wilkusz, B., Rasbach, L., and Jahnke, P.
(2023). On a method for detecting periods and re-
peating patterns in time series data with autocorrela-
tion and function approximation. Pattern Recognition,
138:109355.
Buades, A., Coll, B., and Morel, J.-M. (2005). A non-local
algorithm for image denoising. In 2005 IEEE com-
puter society conference on computer vision and pat-
tern recognition (CVPR’05), volume 2, pages 60–65.
IEEE.
Cleveland, R. B., Cleveland, W. S., McRae, J. E., and Ter-
penning, I. (1990). Stl: A seasonal-trend decomposi-
tion. J. Off. Stat, 6(1):3–73.
Fisher, R. A. (1929). Tests of significance in harmonic anal-
ysis. Proceedings of the Royal Society of London.
Series A, Containing Papers of a Mathematical and
Physical Character, 125(796):54–59.
Gao, J., Song, X., Wen, Q., Wang, P., Sun, L., and Xu,
H. (2020). Robusttad: Robust time series anomaly
detection via decomposition and convolutional neural
networks. arXiv preprint arXiv:2002.09545.
Glynn, E. F., Chen, J., and Mushegian, A. R. (2006). Detect-
ing periodic patterns in unevenly spaced gene expres-
sion time series using lomb–scargle periodograms.
Bioinformatics, 22(3):310–316.
Hu, F., Smeaton, A. F., and Newman, E. (2014). Periodic-
ity detection in lifelog data with missing and irregu-
larly sampled data. In 2014 IEEE International Con-
ference on Bioinformatics and Biomedicine (BIBM),
pages 16–23. IEEE.
Hyndman, R. (2018). Forecasting: principles and practice.
OTexts.
Hyndman, R. J. (2023). findfrequency: Find dominant fre-
quency of a time series.
Hyndman, R. J. and Killick, R. (2023). Cran task view:
Time series analysis.
Lomb, N. R. (1976). Least-squares frequency analysis of
unequally spaced data. Astrophysics and space sci-
ence, 39:447–462.
Robust Autocorrelation for Period Detection in Time Series
43

Parthasarathy, S., Mehta, S., and Srinivasan, S. (2006). Ro-
bust periodicity detection algorithms. In Proceedings
of the 15th ACM international conference on Informa-
tion and knowledge management, pages 874–875.
Puech, T., Boussard, M., D’Amato, A., and Millerand, G.
(2020). A fully automated periodicity detection in
time series. In Advanced Analytics and Learning on
Temporal Data: 4th ECML PKDD Workshop, AALTD
2019, W
¨
urzburg, Germany, September 20, 2019, Re-
vised Selected Papers 4, pages 43–54. Springer.
SAP (2024). Seasonality test in predictive analysis library
(pal) of sap hana cloud and database.
Schmidl, S. (2023). Periodicity detection: Detect the domi-
nant period in univariate, equidistant time series data.
Tolas, R., Portase, R., Iosif, A., and Potolea, R. (2021). Pe-
riodicity detection algorithm and applications on iot
data. In 2021 20th International Symposium on Paral-
lel and Distributed Computing (ISPDC), pages 81–88.
IEEE.
Toller, M., Santos, T., and Kern, R. (2019). Sazed:
parameter-free domain-agnostic season length estima-
tion in time series data. Data Mining and Knowledge
Discovery, 33(6):1775–1798.
Toller, M., Santos, T., and Kern, R. (2020). sazedr:
Parameter-free domain-agnostic season length detec-
tion in time series.
Vlachos, M., Meek, C., Vagena, Z., and Gunopulos, D.
(2004). Identifying similarities, periodicities and
bursts for online search queries. In Proceedings of
the 2004 ACM SIGMOD international conference on
Management of data, pages 131–142.
Vlachos, M., Yu, P., and Castelli, V. (2005). On periodicity
detection and structural periodic similarity. In Pro-
ceedings of the 2005 SIAM international conference
on data mining, pages 449–460. SIAM.
Wang, J., Chen, T., and Huang, B. (2005). Cyclo-period
estimation for discrete-time cyclo-stationary signals.
IEEE transactions on signal processing, 54(1):83–94.
Wang, X., Smith, K., and Hyndman, R. (2006).
Characteristic-based clustering for time series data.
Data mining and knowledge Discovery, 13:335–364.
Wen, Q., He, K., Sun, L., Zhang, Y., Ke, M., and Xu, H.
(2021). Robustperiod: Robust time-frequency mining
for multiple periodicity detection. In Proceedings of
the 2021 international conference on management of
data, pages 2328–2337.
Wen, Q., Yang, L., and Sun, L. (2023). Robust domi-
nant periodicity detection for time series with missing
data. In ICASSP 2023-2023 IEEE International Con-
ference on Acoustics, Speech and Signal Processing
(ICASSP), pages 1–5. IEEE.
Wichert, S., Fokianos, K., and Strimmer, K. (2004). Identi-
fying periodically expressed transcripts in microarray
time series data. Bioinformatics, 20(1):5–20.
Zhang, C., Zhou, T., Wen, Q., and Sun, L. (2022). Tfad:
A decomposition time series anomaly detection archi-
tecture with time-frequency analysis. In Proceedings
of the 31st ACM International Conference on Informa-
tion & Knowledge Management, pages 2497–2507.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
44
