
Intelligent Health & Mission Management Architecture for Autonomous
and Resilient Distributed Space Systems
Mohammad Reza Jabbarpour
1 a
, Ghaith El-Dalahmeh
1
, Bao Quoc Vo
1 b
and Ryszard Kowalczyk
2,3 c
1
School of Science, Computing and Engineering Technologies, Swinburne University of Technology, Melbourne, Australia
2
University of South Australia, Adelaide, Australia
3
Polish Academy of Sciences, Warsaw, Poland
Keywords:
Distributed Space System, AI-Enabled Satellite Constellation, Mission Planning, Resiliency.
Abstract:
Distributed Space Systems (DSS) play a vital role in the success of multi-spacecraft missions, which are gar-
nering considerable attention because of their affordability through lower costs of multiple smaller spacecraft,
adaptability through reconfiguration, and resilience to failure through redundancy. These systems enable col-
laborative endeavours among spacecraft, thus amplifying exploration capabilities within such missions. Never-
theless, the presence of multiple satellites amplifies the system’s complexity and raises the probability of fault
occurrences. Consequently, an efficient health and mission management (HMM) system capable of accurately
detecting and identifying faults within such a complex system is imperative to enhance mission success. In
this study, we introduce an innovative Intelligent Agent-based HMM (IHMM) architecture for multi-spacecraft
systems, leveraging Intelligent Agents (IAs) to seamlessly integrate mission success with satellite health and
resilience. A thorough exploration and classification of diverse data sources suitable for integration into IAs
is conducted, categorised according to their deployment type and intended roles. To evaluate and validate our
proposed architecture, we conducted a preliminary analysis using one-time and continuous friction faults on a
reaction wheel. The experiments show our approach outperforms traditional methods by proactively adapting
control strategies in real-time and preventing saturation of other reaction wheels.
1 INTRODUCTION
Over the past decade, there has been a noticeable shift
towards utilising distributed space systems, such as
satellite constellations, as opposed to monolithic sys-
tems. This trend, bolstered by increased private in-
vestment and the launch of large constellations, is
part of the ”Space 4.0” or ”New Space” movement
(Iacomino, 2019). Educational institutions have also
become key players in space exploration, particularly
through the use of CubeSats, small satellites initially
introduced by California Polytechnic State University
in 1999. The advancement of commercial off-the-
shelf (COTS) technologies has transformed CubeSats
from educational tools to commercially viable plat-
forms. Leading examples of this shift include satellite
constellations like Starlink, OneWeb, and Lemur-2,
a
https://orcid.org/0000-0003-2631-1168
b
https://orcid.org/0000-0002-7404-110X
c
https://orcid.org/0000-0003-0937-4028
some of which are expected to exceed 1000 satellites,
highlighting a significant departure from traditional
space approaches. While ”mass production” of satel-
lites is now feasible, the challenge remains in man-
aging their ”mass operations.” This shift, driven by
economic and strategic advantages of distributed sys-
tems over monolithic ones such as feasibility, redun-
dancy, resiliency, and cost-effectiveness, requires new
approaches. Traditional manual control by skilled op-
erators, even with batched telecommands, becomes
increasingly complex with larger numbers of space-
craft. This method is not scalable for large satellite
constellations, necessitating new operational methods
and greater automation (Ben-Larbi et al., 2021). Tran-
sitioning to large-scale constellations introduces sig-
nificant challenges, including higher complexity of (i)
basic communication tasks and ground resources al-
location, (ii) coordination and higher probability of
anomalies, (iii) mission objectives, and (iv) space
situational awareness (SSA) functionalities (Krupke
116
Jabbarpour, M. R., El-Dalahmeh, G., Vo, B. Q. and Kowalczyk, R.
Intelligent Health & Mission Management Architecture for Autonomous and Resilient Distributed Space Systems.
DOI: 10.5220/0013094600003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 3, pages 116-123
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

et al., 2019). In the dynamic realm of space explo-
ration and satellite technology, ensuring the success
and safety of space missions has become increasingly
dependent on robust SSA capabilities and subsys-
tems health. Intelligent Health and Mission Manage-
ment (IHMM) represents a promising technological
approach that integrates mission success with health
of satellite’s subsystems. To motivate research ef-
forts in this area and pave the way for the automated
management of large distributed satellite systems, this
paper presents a resilience-oriented architecture for
IHMM by considering the flow of pre-processed data
as an input for IAs. In summary, this paper provides
the following contributions:
• Proposes two distinct classifications of data
sources based on sensor deployment type and
their respective roles for IHMM.
• Proposes a novel resilience-oriented architecture
for IA-enabled IHMM that integrates various AI-
based technologies to increase mission success.
• Presents preliminary analysis to evaluate pro-
posed architecture effectiveness considering reac-
tion wheel friction faults as a use case scenario.
The paper is structured as follows: Section 2
reviews related concepts and approaches, focusing
on resiliency in DSSs. Section 3 classifies data
sources and sensors for IHMM. Section 4 details the
resilience-oriented IHMM architecture and compo-
nents. Section 5 presents preliminary analysis of the
proposed architecture. Conclusions and future work
are in Section 6.
2 LITERATURE REVIEW
Spacecraft face numerous challenges during mis-
sions, such as harsh environments and the inability to
repair or replace malfunctioning equipment. Extreme
conditions in space, such as temperature cycling,
vacuum, and radiation, degrade critical instruments
and systems, especially in Low-Earth Orbit (LEO)
and Geosynchronous satellite operations. Compo-
nents like Telemetry, Tracking and Command (TTC)
transponders, Attitude Determination and Control
Systems (ADCS), Solar Arrays and Electrical Power
Systems (EPS) are particularly susceptible. Inte-
grated System Health Management (ISHM) repre-
sents a promising technological approach that inte-
grates sensor data from different sources with histor-
ical records of component and subsystem health sta-
tus (Figueroa et al., 2006). This fusion facilitates the
generation of actionable insights, empowering intel-
ligent decision-making concerning satellite constella-
tion operation, maintenance, and resilience. ISHM
primarily depends on evaluations and forecasts of sys-
tem health, which encompass early fault detection and
the estimation of Remaining Useful Life (Jennions,
2011). Various AI techniques have been applied to
space ISHM systems, with a notable link between
the advancement of AI technology and its integra-
tion into space health management. Many AI tech-
nologies initially developed within the aerospace in-
dustry have matured and found application in space
health management systems. In the 1970s and 1980s,
rule-based expert systems were prevalent, coinciding
with NASA’s Integrated Vehicle Health Management
(IVHM). Subsequently, the focus shifted towards ad-
vancing technologies like decision support systems
and emerging fields like Machine Learning (ML).
NASA developed the Remote Agent, the first fully
autonomous AI system for spacecraft, featuring the
Livingstone model-based reasoning system and de-
cision support. It was used in NASA’s X-37 pro-
gram, where Vehicle Management Software (VMS)
diagnosed and predicted faults. Although the X-
37 IVHM experiment concluded, it advanced real-
time ISHM for space missions. In 1992, NASA pri-
oritized IVHM for future space systems. By the
2000s, AI development expanded to deep learning,
robotics, and autonomous vehicles, while aerospace
ISHM emphasized model-based reasoning. Systems
like MAPGEN enabled constraint-based planning for
Mars missions (Ai-Chang et al., 2004). Recently, fo-
cus has shifted to onboard autonomy in diagnostics,
prognostics, and navigation using AI
The next advancement in the ISHM paradigm,
known as Intelligent Health and Mission Manage-
ment (IHMM) (Ranasinghe et al., 2022), has emerged
to seamlessly integrate mission success with space-
craft health. IHMM systems bring forth the ability
to forecast declines in the operational performance of
subsystems, allowing for timely identification of suit-
able corrective or reconfiguration measures. This en-
sures that the system maintains an acceptable level of
operational capability well in advance of any poten-
tial failure event (Ranasinghe et al., 2022). Our pro-
posed resilience-oriented IHMM architecture which
integrates different AI-based technologies for HMM
is discussed in the section 4.
3 DATA CLASSIFICATION
The effectiveness of IHMM relies on diverse data
from space-based and ground-based assets, providing
vital insights into satellite health, resilience, and mis-
sion facilitation. Advanced sensors and technologies
Intelligent Health & Mission Management Architecture for Autonomous and Resilient Distributed Space Systems
117

enhance safety, efficiency, and security in space oper-
ations while supporting exploration and resource uti-
lization. Given the critical role of satellite health in
mission success, sensors are categorized by deploy-
ment (space or ground) and function in health man-
agement, mission success, or both (see Table 1), clar-
ifying their role in satellite operations.
3.1 Deployment-Based Classification
Ground-based sensors are vital for satellite operations
but have limitations such as line-of-sight obstructions
and atmospheric interference. With growing mis-
sion complexity, integrating space-based sensors is
essential. These sensors provide continuous, unob-
structed observations, enabling precise monitoring,
early anomaly detection, and real-time space weather
monitoring. They enhance SSA, improve communi-
cation with GSs, and mitigate risks, making them crit-
ical for optimising mission success in space explo-
ration.
3.2 Role-Based Classification
Satellite health is critical for space missions, requiring
effective monitoring and maintenance (Ranasinghe
et al., 2022). Beyond health, mission success involves
meeting objectives and handling space complexities,
aided by various sensors. Some focus on health, oth-
ers on mission goals or space navigation, while cer-
tain sensors serve dual roles. This section classifies
sensors by their roles—health management, mission
success, or dual-purpose—helping operators optimize
decisions for mission success and satellite longevity.
4 PROPOSED ARCHITECTURE
The objective of IHMM is to develop an opera-
tional management solution using AI to monitor sys-
tem conditions and provide real-time health assess-
ments for safety-critical and mission-essential sys-
tems. It anticipates faults or performance degrada-
tion, enabling timely recovery actions and adjust-
ments to maximise mission performance. IHMM en-
hances safety and reliability through precise real-time
insights into system health and situational capabili-
ties. It considers mission objectives, operational con-
ditions, and environmental indicators for informed
decision-making. The system forecasts performance
declines, identifies components needing reconfigura-
tion, and adjusts mission profiles to maintain opera-
tional capability, reducing the risk of failure or mis-
sion aborts. Main drivers of IHMM system are dis-
cussed this section. Moreover, a generic architecture
of IHMM system by considering pre-processed data
flow as an input for IA is proposed at the end of the
section.
4.1 Health and Usage Monitoring
System (HUMS)
A HUMS collects, processes, and analyzes critical
system component data using onboard sensors to
monitor key systems and environmental indicators.
These sensors enable early fault detection and proac-
tive measures to prevent disruptions, as discussed in
previous sections. Sensor data is sent to a central unit
for logging and storage, processed onboard or at a
GS, and critical information is transmitted to GS op-
erators as needed. Pre-processing involves filtering,
fusion, and analysis to remove noise, ensuring ac-
curate normal behavior representation (Gregory and
Liu, 2021). Data fusion integrates diverse sources,
extracting features for ML models. Fault condi-
tion indicators are monitored by analyzing anoma-
lies against a trained model, updated continuously to
adapt to operational changes, ensuring accurate diag-
nostics and prognostics. Reasoning methods include
knowledge-based, model-based, and data-driven ap-
proaches. Data-driven methods, such as ML (Neu-
ral Networks, SVMs, Clustering, Fuzzy Logic) and
statistical techniques (Gaussian Process Regression,
least squares regression, Hidden Markov Models), are
preferred for their independence from physical mod-
els, lower costs, and faster processing times.
4.2 Fault Detection, Isolation, and
Recovery (FDIR)
FDIR is vital in aerospace and spacecraft opera-
tions, monitoring sensory data or computed vari-
ables against nominal values derived from normal
operations. Monitoring parameters are identified by
analysing failure mechanisms. Significant deviations
are tested to exclude false positives and input into an
inference module with a fault model covering poten-
tial faults. This enables real-time adjustments or re-
pairs to maintain performance until full maintenance
is feasible (Holland, 2010).
Failure Mode, Effects, and Criticality Analysis
(FMECA) is widely used to understand fault mecha-
nisms and identify critical failure paths. By analysing
system parameters (e.g., temperature, mass, voltage),
FMECA aids in pinpointing the fault’s nature and lo-
cation.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
118
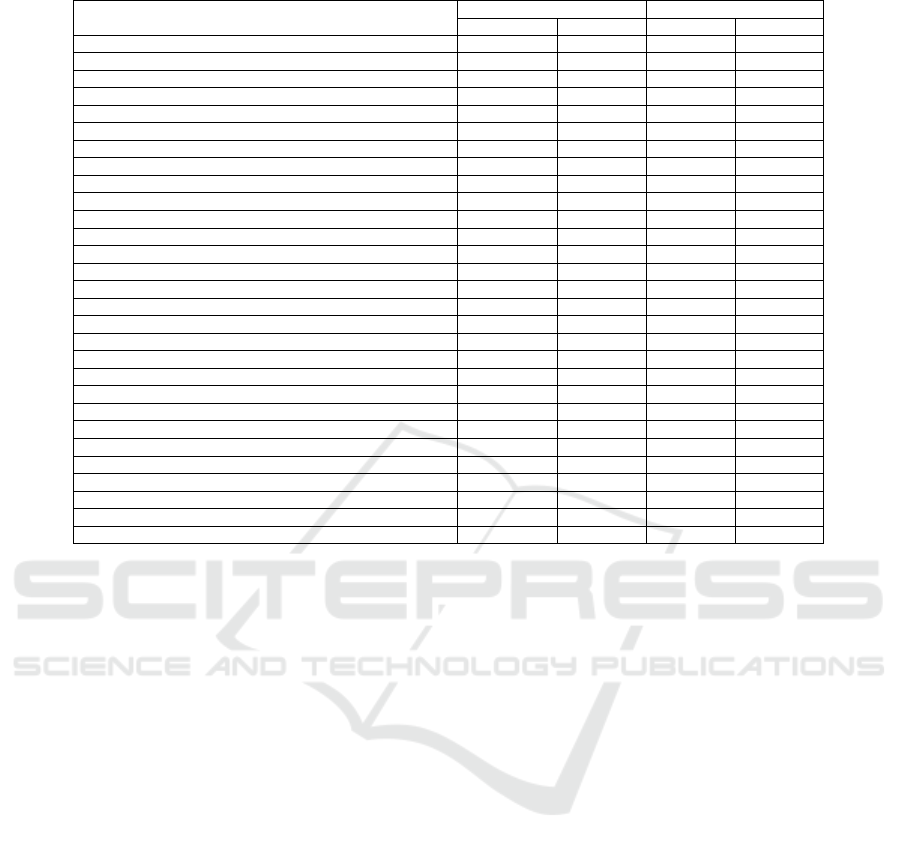
Table 1: List of Sensors and Data Sources by considering 2 Classifications.
Sensors
Deployment-based Role-based
Space Ground Health Mission
Infrared Cameras ✓ ✓ ✓
Star Trackers ✓ ✓
Solar Array Sensors ✓ ✓
Battery Sensors ✓ ✓
Thermal Infrared Sensors ✓ ✓ ✓
Gyroscopes ✓ ✓
Accelerometers ✓ ✓
Magnetometers ✓ ✓ ✓
Telemetry Data ✓ ✓
Inertial Measurement Units (IMUs) ✓ ✓
GPS/ GNSS Receivers ✓ ✓ ✓ ✓
Antenna Pointing Sensors ✓ ✓
Transponder Sensors ✓ ✓
Central Processing Unit (CPU) Load Sensors ✓ ✓
Memory Utilisation Sensors ✓ ✓
Thruster Status Sensors ✓ ✓
Fuel Level Sensors ✓ ✓
Error Logs ✓ ✓
Onboard Clock Sensors ✓ ✓
High-Resolution telescopes & Optical Cameras ✓ ✓ ✓ ✓
multi-spectral (MSP) and hyper-spectral (HSP) optical sensors ✓ ✓
Radar Sensors (e.g., Synthetic Aperture Radar (SAR)) ✓ ✓ ✓ ✓
Automatic Identification System (AIS) Receivers/ Transponders ✓ ✓ ✓
RF Sensors ✓ ✓ ✓
Satellite Communication Systems (Laser or RF) ✓ ✓ ✓
EO/IR (Electro-Optical/Infrared) Cameras ✓ ✓ ✓
LIDAR (Light Detection and Ranging) ✓ ✓ ✓
Radiation Detectors (Dosimeters, Particle Detectors, Spectrometers) ✓ ✓ ✓ ✓
Solar Observatories ✓ ✓ ✓
4.3 Predictive Fault Analytics
Fault prediction is vital for ensuring the reliability
of complex engineering systems, including aerospace
and manufacturing. By leveraging advanced data
analytics, ML algorithms, and predictive modeling,
fault prediction anticipates failures or anomalies be-
fore they occur. This proactive strategy enables timely
maintenance, reduces downtime and costs, and en-
hances system performance and resilience. System
integrity reflects trust in performance based on stan-
dards, with integrity flags signaling unmet criteria.
Traditional health monitoring is reactive, lacking im-
mediate prevention of critical issues or smooth degra-
dation of safety-critical systems. Therefore, fault pre-
diction is crucial for predictive reliability.
The need for methods combining reactive and pre-
dictive approaches is especially important for com-
plex autonomous missions (Thangavel et al., 2024).
Predictive integrity, derived from Avionics-Based In-
tegrity Augmentation (ABIA), was developed for
safety-critical GNSS applications.
4.4 Resilience-Oriented IHMM
Architecture
Satellite avionics oversee critical operations, includ-
ing housekeeping, task execution, resource allocation,
payload handling, and information security. With the
growing sophistication of small satellites, their soft-
ware complexity has increased, driven by a shift of
functionalities from ground-based systems to onboard
computers, enhancing autonomy and mission capabil-
ities. To address this complexity, agent-based archi-
tecture is proposed for its unique features, such as
decentralisation, modularity, robustness, scalability,
flexibility, adaptability, and resiliency, among others.
The resilience-oriented IHMM architecture, in-
corporating AI-based technologies for data prepro-
cessing and input to intelligent agents (IA), is de-
picted in Fig. 1. Fault detection, the initial and
critical phase of FDIR systems, enables spacecraft to
autonomously handle issues without ground operator
support. Built-in testing (BIT), a widely used fault
detection and isolation method, identifies and isolates
faults without external equipment. FDIR systems as-
sess fault severity using fault models, monitored pa-
rameters, and BIT outputs, providing inputs to IA for
further action.
The TT&C subsystem serves as the primary com-
munication link between a satellite and GS, facili-
tating control and monitoring operations. It accom-
plishes this by gathering telemetry data from all satel-
lite subsystems and transmitting it to the GS, while
also receiving commands from the ground. TT&C is
responsible for three key tasks (Anyaegbunam, 2014):
Intelligent Health & Mission Management Architecture for Autonomous and Resilient Distributed Space Systems
119
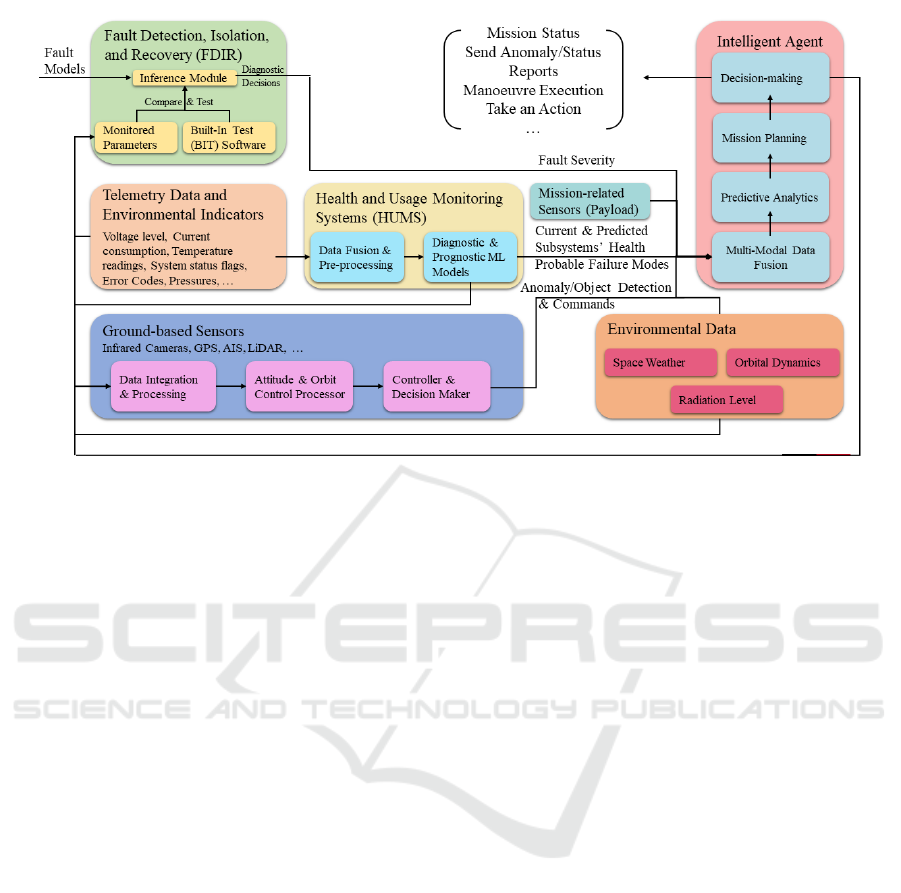
Figure 1: Resilience-oriented IHMM Architecture.
1. Health monitoring, achieved by analysing re-
ceived telemetry data via AI algorithms at the GS
to assess the satellite’s condition.
2. Satellite tracking to determine its location.
3. Satellite control by executing commands received
from the GS.
These functions are vital for satellite operations, en-
abling system health monitoring and abnormal be-
havior detection (Abdelghafar et al., 2020). Ground-
based sensors such as infrared cameras, GPS, AIS,
and LiDAR can be integrated into ground stations
(GS) to offer valuable inputs for intelligent agents
(IA). Thus, anomaly detection and command signals
from GSs can serve as IA inputs.
Telemetry data supports HUMS (space-based or
ground-based) in assessing subsystem health and
identifying failure modes (Chen et al., 2022). Envi-
ronmental factors like space weather, radiation lev-
els, and communications from neighboring satellites
can be processed directly by IA or at a GS, contribut-
ing relevant information. Payload data from mission-
related sensors is another critical input for IA, link-
ing spacecraft health to mission success (Sibilla,
2022). Consequently, pre-processed data from AI-
based units can replace raw data as IA inputs, enhanc-
ing mission capabilities and objectives.
5 PRELIMINARY ANALYSIS
In order to evaluate and validate our proposed archi-
tecture, a preliminary analysis is conducted in this
section. According to (Perumal et al., 2021) the at-
titude and orbit control system (AOCS) contributes
to 32% of small satellite failures. Reaction wheels
(RWs) are critical components for AOCS which are
used for satellite attitude control. By spinning the
reaction wheel at different speeds, the satellite can
change its orientation without using fuel. This is
based on the principle of conservation of angular mo-
mentum. RWs are prone to various failure and degra-
dation, among them friction fault is the one which is
considered in this paper. A friction fault in the reac-
tion wheels of a satellite refers to an increase in the
internal friction within the reaction wheel assembly,
which can impede the wheel’s ability to spin freely.
This friction can lead to reduced performance or com-
plete failure of the reaction wheel, compromising the
satellite’s ability to control its orientation (attitude) in
space.
Two different friction faults are considered for
evaluation purpose:
1. Defines an event that injects a large, one-time
static friction fault.
2. Defines an event that is always active, and adds a
smaller static friction fault with small probability
Basilisk (Kenneally et al., 2020), an Astrody-
namics Simulation Framework, is utilised for simu-
lation environment. The simulated scenario involves
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
120
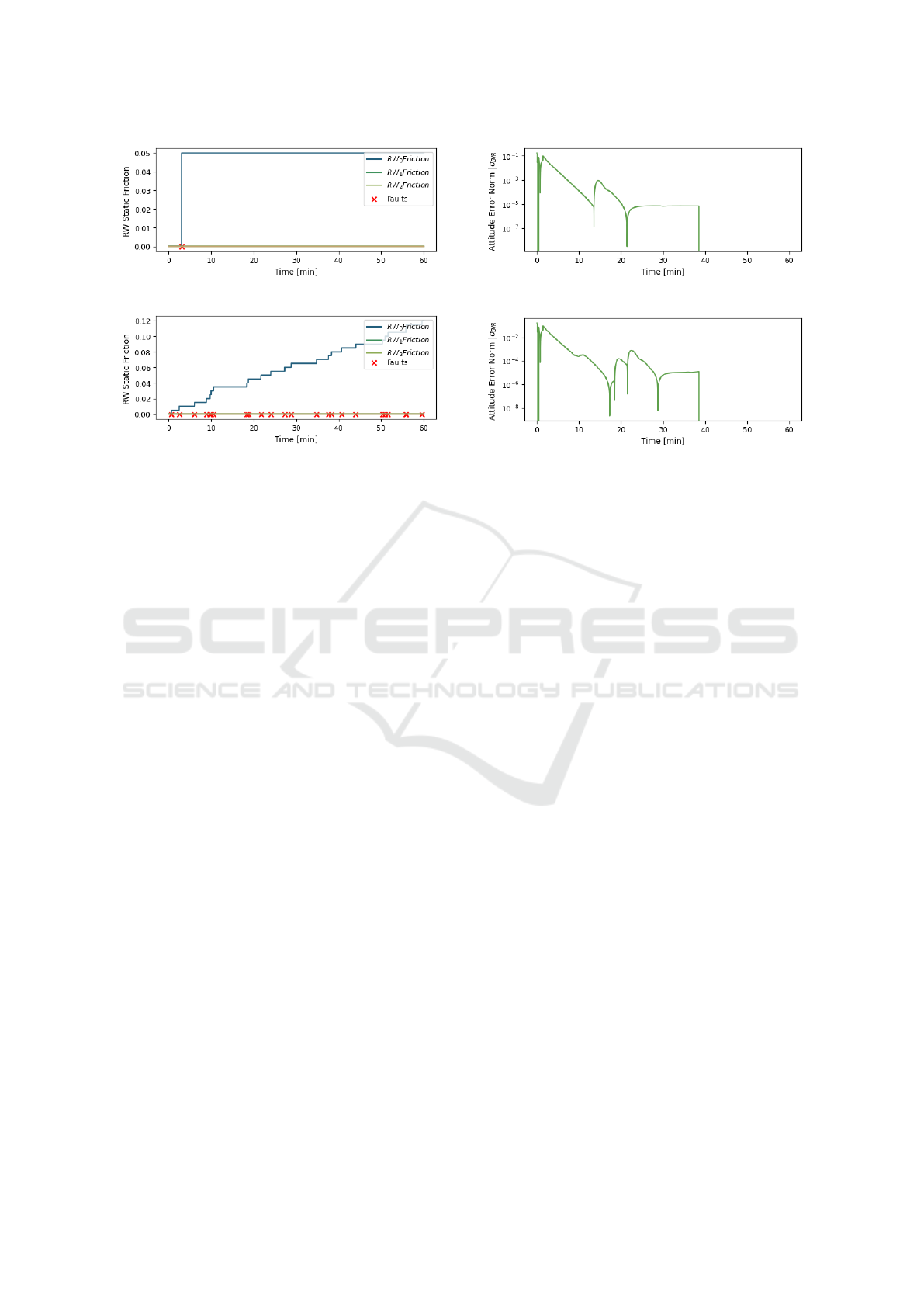
Figure 2: One-time static friction fault.
Figure 3: Continuous smaller static friction fault.
a 6-degree-of-freedom (6-DOF) small satellite’s at-
titude control over a 60-minute period while orbit-
ing Earth in LEO, focusing on maintaining orienta-
tion during an eclipse and handling a reaction wheel
fault. The satellite uses ”Honeywell HR16” reaction
wheels controlled by a PD controller to align with the
desired attitude. The eclipse module simulates the
Earth’s shadow, temporarily affecting the sun’s vis-
ibility and the satellite’s sensors. A friction fault is
injected in one of the reaction wheels, testing the sys-
tem’s resilience. The simulation logs various param-
eters, including attitude error, reaction wheel torque,
and speed, and generates plots to illustrate the satel-
lite’s performance in maintaining orientation despite
the injected fault.
Figures 2 and 3 show one-time and continuous
static friction faults in RW
1
, respectively. In Figure 2,
RW
0
experiences a friction fault at the 3rd minute of
the simulation, with static friction sharply increasing
and stabilizing at a higher level—indicating potential
mechanical issues like bearing wear. RW
1
and RW
2
maintain low, stable friction, showing normal opera-
tion. The early fault in RW
0
could impair its attitude
control efficiency.
Figure 3 depicts a continuous fault in RW
0
, with
static friction rising stepwise over 60 minutes. Fre-
quent faults, such as RW
0
saturation, suggest ongoing
degradation, while RW
1
and RW
2
remain unaffected.
This fault could also reduce the spacecraft’s attitude
control performance.
Each of above mentioned faults can be happened
due to the following events, respectively. For each
event, the cause & effectare discussed as follows.
1. Bearing Wear
• Cause & effect: Reaction wheels are mounted
Figure 4: Impact of one-time static friction fault on attitude.
Figure 5: Impact of continuous smaller static friction fault
on attitude.
on bearings that enable smooth spinning. How-
ever, prolonged use can cause the bearings to
wear, leading to increased friction and resis-
tance, which hinders the wheel’s ability to spin
at the desired speed.
2. RW saturation:
• Cause & effect: Reaction wheel saturation hap-
pens when wheels reach their maximum spin
rate, preventing additional torque. Persistent
saturation can strain bearings and mechanical
parts, leading to increased friction.
The effects of on-time and continuous friction
faults on satellite attitude are shown in Figures 4 and
5, respectively. These figures depict the attitude error
norm, indicating the deviation from the desired ori-
entation over simulation time. Figure 4 shows initial
fluctuations due to a friction fault, while Figure 5 ex-
hibits more frequent corrections and fluctuations with
continuous faults.
In the traditional architecture (without IA), at both
cases, the PD controller adjusts control torque to
minimize attitude error, while other reaction wheels
(RWs) compensate by increasing torque to stabilize
the spacecraft. This method allows for quick sta-
bilization but overlooks broader factors like overall
satellite status, mission goals, and long-term conse-
quences. Consequently, this leads to increased stress
on the remaining RWs, risking saturation and reduc-
ing the satellite’s ability to maintain precise pointing,
which can compromise the mission.
Figure 6 illustrates the RWs’ speeds over time.
The blue line, representing the affected wheel’s speed,
remains nearly constant, showing it is no longer effec-
tively contributing to attitude control due to increased
Intelligent Health & Mission Management Architecture for Autonomous and Resilient Distributed Space Systems
121

Figure 6: Reaction Wheels speed with PD controller.
friction. The other two lines display significant speed
variations, indicating they are compensating for the
degraded wheel’s performance loss. These fluctua-
tions highlight the increased effort needed to maintain
stability as the control system adjusts. Consequently,
current FDIR methods and PD controllers are mainly
reactive, offering only short-term responses.
In contrast, The IA assesses the friction fault con-
sidering the satellite’s overall status, including sub-
system health, mission phase, and environmental fac-
tors like space weather. This enables the IA to eval-
uate fault severity beyond immediate attitude errors.
By combining real-time HUMS data with historical
trends, the IA can predict if the fault will result in
a total reaction wheel failure. If so, it can take pre-
emptive measures to reduce impact. Additionally, the
IA considers the mission phase and objectives: prior-
itizing precise attitude control during critical phases
(e.g., imaging or communication alignment) or opt-
ing to conserve resources by reducing control effort
during less critical periods.
In our scenario, the IA dynamically adjusts its
control strategy in real-time to account for the reduced
effectiveness of the faulty reaction wheel (RW). To
avoid saturating the remaining RWs, it switches to
an alternative control algorithm better suited to the
situation. The IA proactively employs magnetic tor-
quers alongside the remaining RWs to distribute the
control load, reduce the control burden, and sustain
their effectiveness during the mission-critical phase.
This approach is validated in the literature, including
(Avanzini et al., 2019) and (He et al., 2023). The
dipole moment for the torque rods is shown in Fig-
ure 7. Initial spikes indicate the activation of torque
rods for attitude control and desaturation of the other
RWs. The observed reduction and stabilization of the
dipole moment over time demonstrate that the initial
intervention effectively mitigated the effects of RW
degradation, allowing other RWs to regain control.
Figure 8 shows the effectiveness of magnetic tor-
quers in controlling the speed of reaction wheels. The
rotational speeds fluctuate initially, but these fluctu-
ations diminish over time, particularly after 20 min-
utes. Compared to using only the PD controller (see
Figure 6), the reaction wheels’ speeds are signifi-
Figure 7: Dipole moment for the torque rods.
Figure 8: Reaction Wheels speed using magnetic torquers.
cantly reduced, indicating lower stress and reduced
risk of saturation.
In summary, the IA’s proactive and predictive ca-
pabilities enhance response to friction faults in a re-
action wheel by leveraging satellite status, historical
data, and mission objectives. By integrating predic-
tive analysis and adaptive control with the traditional
PD controller, it offers a more resilient, mission-
aware fault management strategy. This approach sta-
bilizes the satellite more effectively, extends opera-
tional life, and ensures mission success. The proposed
architecture resolved these faults promptly, primarily
due to centralized decision-making and recovery by a
single IA that processes all relevant data. This cen-
tralization minimizes conflicts, ensures system-wide
consistency, and reduces errors common in decentral-
ized systems. Additionally, it enables faster response
times by streamlining decision-making and improv-
ing resource management through optimized alloca-
tion of processing power, memory, and communica-
tion bandwidth. Maintaining a holistic view of the
satellite’s status improves fault detection and supports
proactive interventions. Consequently, the architec-
ture enhances resiliency and significantly boosts the
mission success rate, offering a robust solution for
complex space missions.
6 CONCLUSION AND FUTURE
WORK
In this article, we explored the factors driving the
rise of DSS in multi-spacecraft missions and empha-
sised the necessity of a resilience-oriented architec-
ture that integrates satellite health and mission suc-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
122

cess. By classifying diverse data sources and inves-
tigating mission-based DSS literature, we proposed
a novel resilience-oriented IHMM architecture using
AI-based approaches for enhanced fault detection and
mission success. IAs in small satellites are primarily
responsible for health management and mission suc-
cess, relying on lightweight, onboard-executable al-
gorithms. Key measures to enhance DSS resilience
include onboard health management, cluster-based
mission planning, and self-recovery mechanisms. A
preliminary analysis with one-time and continuous
friction faults on the reaction wheel validated our ar-
chitecture. The system efficiently addressed these
faults using proactive adjustments and centralised
decision-making, preventing reaction wheel satura-
tion and maintaining stability. Future work will in-
volve implementing and validating the architecture
in a simulated constellation space environment to
demonstrate its effectiveness.
ACKNOWLEDGEMENTS
This work has been supported by the SmartSat CRC,
whose activities are funded by the Australian Govern-
ment’s CRC Program. We also acknowledge the col-
laborative contributions of the research team (James
Barr, Travis Bessell) from Saab Australia.
REFERENCES
Abdelghafar, S., Darwish, A., and Hassanien, A. E. (2020).
Intelligent health monitoring systems for space mis-
sions based on data mining techniques. Machine
learning and data mining in aerospace technology,
pages 65–78.
Ai-Chang, M., Bresina, J., Charest, L., Chase, A., Hsu, J.-J.,
Jonsson, A., Kanefsky, B., Morris, P., Rajan, K., Ygle-
sias, J., et al. (2004). Mapgen: mixed-initiative plan-
ning and scheduling for the mars exploration rover
mission. IEEE Intelligent Systems, 19(1):8–12.
Anyaegbunam, B. (2014). Design elements of satellite
telemetry, tracking and control subsystems for the pro-
posed nigerian made satellite. Int. J. Eng. Sci. Inven-
tion, 3(1):5–13.
Avanzini, G., de Angelis, E., Giulietti, F., and Serrano, N.
(2019). Attitude control of low earth orbit satellites
by reaction wheels and magnetic torquers. Acta astro-
nautica, 160:625–634.
Ben-Larbi, M. K., Pozo, K. F., Haylok, T., Choi, M., Grze-
sik, B., Haas, A., Krupke, D., Konstanski, H., Schaus,
V., Fekete, S. P., et al. (2021). Towards the automated
operations of large distributed satellite systems. part
1: Review and paradigm shifts. Advances in Space
Research, 67(11):3598–3619.
Chen, C., Yin, Y., Liu, Y., Wang, D., Chen, R., and Jia, Y.
(2022). Design and discussion of on-orbit autonomous
health management system for mission-constrained
spacecraft.
Figueroa, F., Holland, R., Schmalzwel, J., and Duncav-
age, D. (2006). Integrated system health management
(ishm): systematic capability implementation. In SAS
2006: 2006 IEEE Sensors Applications Symposium,
number SSTI-2200-0066.
Gregory, J. W. and Liu, T. (2021). Introduction to flight
testing. John Wiley & Sons.
He, Y., Yang, S., Lin, S., He, W., and Yang, Z. (2023). Satel-
lite attitude control for emergency mode using reac-
tion wheels and magnetic torquers. In 2023 6th In-
ternational Conference on Robotics, Control and Au-
tomation Engineering (RCAE), pages 207–211. IEEE.
Holland, S. (2010). Integrated vehicle health management
in the automotive industry. Citeseer.
Iacomino, C. (2019). Commercial space exploration: po-
tential contributions of private actors to space explo-
ration programmes. Springer.
Jennions, I. K. (2011). Integrated vehicle health manage-
ment: perspectives on an emerging field. SAE Inter-
national.
Kenneally, P. W., Piggott, S., and Schaub, H. (2020).
Basilisk: A flexible, scalable and modular astrody-
namics simulation framework. Journal of aerospace
information systems, 17(9):496–507.
Krupke, D., Schaus, V., Haas, A., Perk, M., Dippel, J.,
Grzesik, B., Larbi, M. K. B., Stoll, E., Haylock, T.,
Konstanski, H., et al. (2019). Automated data retrieval
from large-scale distributed satellite systems. In 2019
IEEE 15th international conference on automation
science and engineering (CASE), pages 1789–1795.
IEEE.
Perumal, R. P., Voos, H., Vedova, F. D., and Moser, H.
(2021). Small satellite reliability: A decade in review.
In 35th Annual Small Satellite Conference.
Ranasinghe, K., Sabatini, R., Gardi, A., Bijjahalli, S.,
Kapoor, R., Fahey, T., and Thangavel, K. (2022). Ad-
vances in integrated system health management for
mission-essential and safety-critical aerospace appli-
cations. Progress in Aerospace Sciences, 128:100758.
Sibilla, M. (2022). Autonomous Onboard Health and Usage
Management System for Smart Satellites. PhD thesis,
Politecnico di Torino.
Thangavel, K., Sabatini, R., Gardi, A., Ranasinghe, K.,
Hilton, S., Servidia, P., and Spiller, D. (2024). Artifi-
cial intelligence for trusted autonomous satellite oper-
ations. Progress in Aerospace Sciences, 144:100960.
Intelligent Health & Mission Management Architecture for Autonomous and Resilient Distributed Space Systems
123
