
LLFSMs to TLA+: A Model-to-Text Transformation of Executable
Models Enabling Specification and Verification of Multi-Threaded and
Concurrent Systems
Vladimir Estivill-Castro
1 a
, Miguel Carrillo
2 b
and David A. Rosenblueth
2 c
1
Department of Engineering, Pompeu Fabra University, Roc Boronat 138, Barcelona 08018, Spain
2
Instituto de Investigaciones en Matem
´
aaticas Aplicadas y en Sistemas, Universidad Nacional Aut
´
onoma de M
´
exico,
Apdo. 20-126, Ciudad de Mexico 01000, Mexico
Keywords:
Reasoning About Models, Model Transformation, Executable Models, Formal Verification.
Abstract:
As complexity of software systems increases, ensuring reliability becomes ever more crucial. Despite ad-
vances, behaviour-modelling techniques still face challenges due to semantic gaps. This work focuses on
translating Logic-Labelled Finite-State Machines (LLFSMs) to the Temporal Logic of Actions (TLA), bridg-
ing the gap between a time-triggered formalism and common temporal logic for model checking. The transla-
tion is innovative as multi-threaded and distributed systems can now be designed using LLFSMs. We illustrate
the translation with Fischer’s protocol (for multi-threaded systems), and release tools with examples for dis-
tributed systems. The approach addresses semantic gaps from three sources: differing finite-state machine
semantics, variations in translating to executable models versus models for checking, and discrepancies be-
tween abstract and executable model translations.
1 INTRODUCTION
Achieving dependable and trustworthy behaviour in
software for autonomous, cyber-physical and real-
time systems, poses significant challenges. While
progress has been made in Model-Driven Software
Development (MDSD), there are indications that tools
and techniques still need to incorporate executable
and verifiable modelling fully. We introduce a model-
to-text translation of arrangements of Logic-Labelled
Finite State Machines (LLFSMs) to the Temporal
Logic of Actions (TLA).
The industry’s current adoption of model trans-
formation techniques seems marginal because of se-
mantic issues (Bucchiarone et al., 2020). Our trans-
lation facilitates the development of software models
for multi-threaded and distributed systems based on
the ubiquitous and well-known concept of finite-state
machines. It enables the simulation and execution of
the models under a transparent and clear semantics.
Without becoming familiar with the target language
of model checkers, developers can verify their mod-
a
https://orcid.org/0000-0001-7775-0780
b
https://orcid.org/0000-0003-2105-3075
c
https://orcid.org/0000-0001-8933-8267
els without semantic gaps.
Our translation enables, for the first time, the
use of LLFSMs to model multi-threaded and dis-
tributed systems. Our prototype implementation is
based on the Eclipse Modelling Framework (EMF)
but, as opposed to our previous translation of LLF-
SMs to SMV (Carrillo et al., 2020), we do not use ATL.
Thus, our implementation prototype executes outside
Eclipse and includes demonstrations of two promi-
nent examples in the literature of distributed systems:
the classical two phase commit and the well-studied
elevator example of the IEC 61499 standard. With
this paper, we release Docker containers that enable
the full reproduction of all examples
1
. Moreover,
we also implement and include a parallel translation
to SMV. Each example includes verification of safety
properties, liveness properties, and real-time proper-
ties without semantic gaps. Moreover, our models are
also translated to three executable formats without se-
mantic gaps (see Fig. 1).
Sec. 2 argues why model translation to TLA+ is
relevant and is followed by a discussion on seman-
1
A “How To” document (Estivill-Castro
et al., 2024) assists using the Docker containers
hub.docker.com/r/vladestivillcastro/llfsms-examples.
Estivill-Castro, V., Carrillo, M. and Rosenblueth, D. A.
LLFSMs to TLA+: A Model-to-Text Transformation of Executable Models Enabling Specification and Verification of Multi-Threaded and Concurrent Systems.
DOI: 10.5220/0013094700003896
In Proceedings of the 13th International Conference on Model-Based Software and Systems Engineering (MODELSWARD 2025), pages 15-26
ISBN: 978-989-758-729-0; ISSN: 2184-4348
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
15
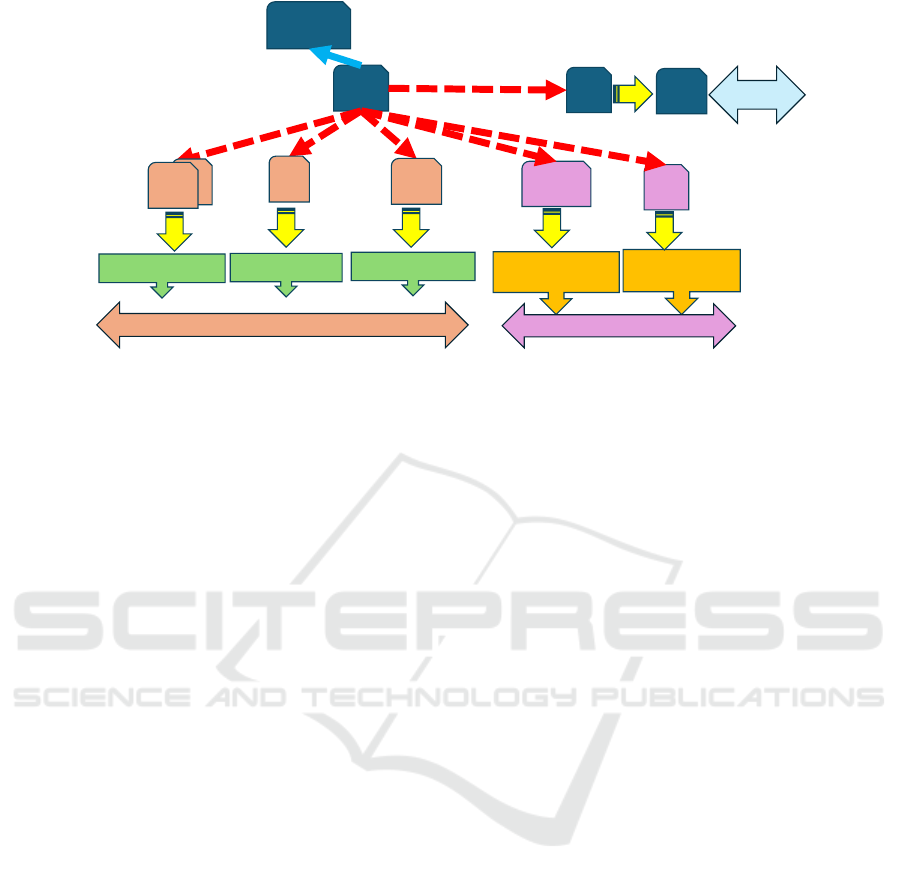
.xmi
Model
Meta-model (Modelling Framework)
.ecore
conforms
.dot
dot script
.pdf
.lisp
.lisp
.nusmv
SMV
file
LISP interpreter
.c
C
source
C scheduler
MIPS
source
.asm
MIPS scheduler
NuSMV/NuXMV
model checker
.tla
TLA+
file
TLC
model checker
Executable
Verifiable
Visual
LISP
source
Figure 1: Our translator (in java) takes models (.xmi) and produces executable and verifiable models.
tic gaps. We present the advantages of LLFSMs as
behaviour models and we summarise related work.
Sec. 4 presents the translation using Fischer’s Proto-
col as a running illustration. This protocol is central
to multi-threaded systems, particularly to TLA+. Fis-
cher’s Protocol is correct for mutual exclusion but not
necessarily for avoiding starvation. We discuss mod-
els of schedulers in Sec. 5. This is also a first for LLF-
SMs: on one hand, the scheduler for the arrangement
is an LLFSM itself, and on the other, formal verifica-
tion of the scheduler is enabled by our model-to-text
translation. Sec. 6 illustrates further advantages be-
fore we conclude in Sec. 7.
2 JUSTIFICATION
TLA has been central to the specification and formal
verification of distributed systems (Merz, 2019). For-
mal verification with TLA+ of multi-threaded systems
and concurrent systems is regularly used by suppli-
ers of cloud services such as Amazon (Newcombe
et al., 2015) and Microsoft (Kuppe, 2023). The au-
thors of the IronFleet methodology highlight TLA+ as
one of the central tools for formal verification (Haw-
blitzel et al., 2015). Others agree: “For our work,
TLA perfectly meets our requirements” (Niyogi and
Nath, 2024).
Building a specification with TLA+ is equivalent
to defining “the system’s spec” where a spec is “a
succinct description of every allowable behaviour of
the system” (Hawblitzel et al., 2015) or the Kripke
structure (a large non-deterministic state machine).
A Kripke state v is a valuation of all system vari-
ables. There is a Kripke transition from one Kripke
state v
1
to another v
2
if the system can reach v
2
from
v
1
in a single execution step. In TLA+ and SMV, the
Kripke structures is defined implicitly, usually com-
posing modules defined with specific notation from
mathematics and logic (Konnov et al., 2022).
We enable the construction of specs using mod-
els of behaviour. We aim to address requests such as
“Although TLA+ specifications are purely declara-
tive, they are meant to be used to describe algorithmic
behaviour, and that should be simulatable, executable
and testable” (Moreira et al., 2022).
Requests for tools that generate executable code
from formal specifications often lead to discussions
about technical differences between formalisms, with
little support for bridging the gap between executable
and verifiable models (Carvalho, 2019). We pos-
tulate that specifications can be created using LLF-
SMs, which can be simulated, translated into high-
level programming languages, and used as input for
model checkers. For developers, working with exe-
cutable models and simulating the specification is a
more intuitive approach (Mart
´
ınez et al., 2012). Our
translation facilitates the development of specs as ex-
ecutable models.
Developers prefer using executable models over
mathematical notation from specification languages
such as Z and TLA, as evidenced by “programmers
do not enjoy reading white papers full of mathemati-
cal notation” (Bellotti, 2019).
Translating these specifications into executable
systems is still largely a manual process: “The adop-
tion of formal methods in industry is challenged by
the cost and complexity involved in the formal specifi-
cation of the system” (Nicol
´
as and Toval, 2009). The
essence of this paper is that LLFSMs are just as for-
mal (as they can be automatically translated into SMV
or TLA+) and just as executable (as they can be trans-
lated into MIPS and C).
IronFleet stresses the importance of eradicating
MODELSWARD 2025 - 13th International Conference on Model-Based Software and Systems Engineering
16
Abstract
model
Executable
model
Executable
model
Validity of behavioural
properties differ
Verifiable
model
Verifiable
model
Translation for
analysis
Translation for
analysis
(a) What is valid of the executable
models?
Abstract
Model
M
Ver ifiable
Model
M
c
Executable
Model
M
e
Generate
Generate
The behaviour of the executable model differs from the
behaviour of the verifiable model on model-checker
simulator
(b) What is valid of the executable
model M
e
?
Abstract
Model
M
Executable
Model
Executable
Model
Generate
Generate
The behaviour of what should be the same executable
model differs from each other
Papyrus UML Modelling Tool
Editing order of the
single model
differs from each other
(c) What is valid, if the same model can
have different behaviours?
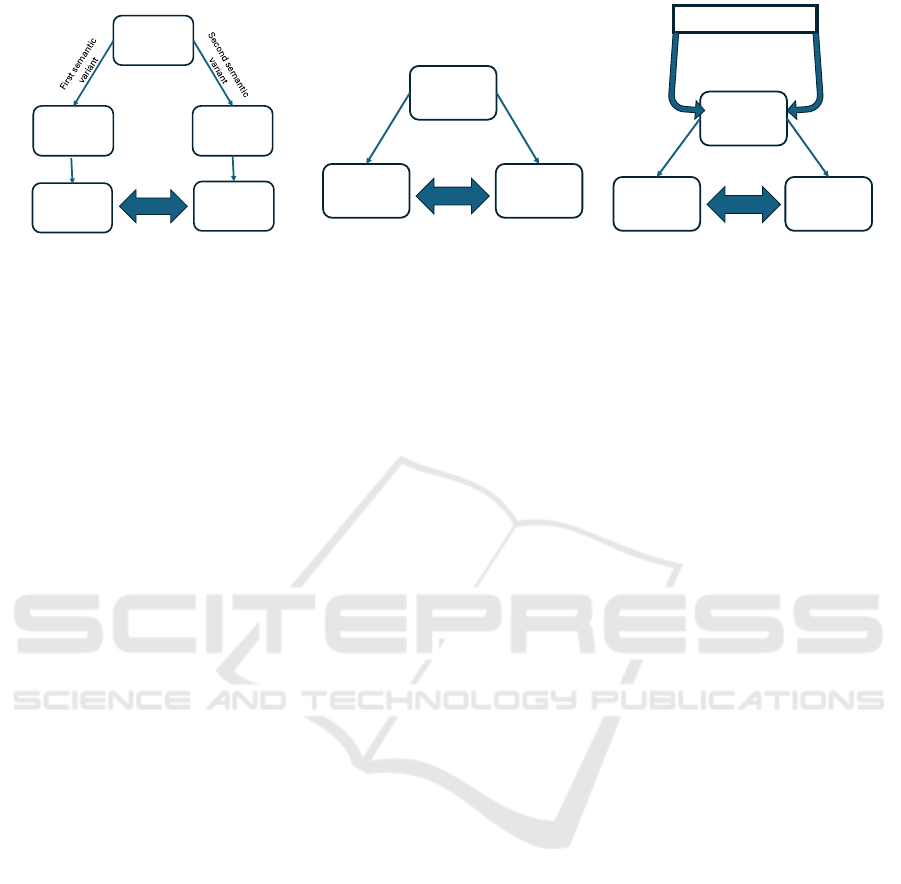
Figure 2: Known semantic gaps.
semantic gaps (Hawblitzel et al., 2015). (Kurshan,
2018) attributes the lesser penetration in the industry
of formal verification to wide semantic gaps.
We are concerned with three types of semantic
gaps (Fig. 2). First, Fig. 2a shows executable mod-
els generated from UML models for analysis with a
model checker. Despite numerous attempts to address
this translation, however, this process may yield in-
consistent formal verification outcomes due to multi-
ple semantic variants within UML. Under one seman-
tic variant, the properties may be valid but invalid un-
der another (Besnard et al., 2018). The IEC 61499
also suffers from semantic variants (Cengic and
Akesson, 2010). Moreover, UML has several exten-
sions (fUML, krtUML, SysML, UML-RT) which not
only have their extended semantics but offer seman-
tic variants among them. (Posse and Dingel, 2016)
report on six attempts for formalising semantics and
their Table 1 contrasts at least four.
A second gap involves scenarios where a model
M is constructed and subsequently translated into
both an executable model M
e
and a model M
c
for the
model checker (Fig. 2b). Discrepancies may arise be-
tween the observed behaviour of the executable model
M
e
and the simulation of M
c
on the model checker.
For instance, consider a scenario where a Papyrus-RT
model M comprises multiple communicating finite-
state machines. Papyrus-RT commonly produces an
executable model M
e
designed for Linux that em-
ploys multitasking services for communication pur-
poses. These intricacies rarely appear in the idealised
model M
c
. Consequently, during simulation by the
model checker, M
e
may exhibit traces not present in
M
c
(Sahu et al., 2020).
A final gap arises when the semantics of a model
depends on the sequence in which components of the
model are edited within an MDSD tool (Pham et al.,
2017) (Fig. 2c). This is a significant risk because
visually identical models ought to possess identical
semantics; (Guermazi et al., 2015) report extensive
evaluation of executions, but even with the reference
implementation, identical models can be created that
behave differently (Estivill-Castro, 2021).
LLFSMs are designed with precise semantics
for their execution and with familiar visual nota-
tion. LLFSMs were first used for robotic sys-
tems (Brooks, 1990) but have been applied in em-
bedded systems (McColl et al., 2022; Carrillo et al.,
2020), micro-controllers, and FPGAs.
In LLFSMs, predicates (as opposed to events) la-
bel the transitions between states 1) facilitating sim-
ple semantics, e.g., using polling instead of inter-
ruptions, and 2) enabling scheduling the machines
as time-triggered systems, which are easier to ver-
ify than event-triggered machines (Furrer, 2019). By
using LLFSMs, we eliminate the second type of se-
mantic gap (Fig. 2b) to the point that, as suggested by
(Besnard et al., 2018), although inefficient, the model
checker could act as the interpreter for execution.
3 RELATED WORK
There have been efforts to translate UML statecharts
into PROMELA for the SPIN model checker (Latella
et al., 1999). There have also been efforts to translate
to timed automata or some form of Petri nets (Andr
´
e
et al., 2023). Many others translate or generate SMV,
the input language of NuSMV, started by (Kwon, 2000).
Other formalisms have been the target of the transla-
tion, such as process algebras, i.e., Hoare’s Commu-
nicating Sequential Processes (CSP), or the Language
Of Temporal Ordering Specification (LOTOS) as well
as PVS, KIV, B and Z (Andr
´
e et al., 2023). None of
these translate to TLA+.
Three types of research are closest to our work.
First is the translation using ATL to SMV by (Carrillo
LLFSMs to TLA+: A Model-to-Text Transformation of Executable Models Enabling Specification and Verification of Multi-Threaded and
Concurrent Systems
17
Bool sensor: T1 Non C Sec Delay, T1 C Sec Delay, T2 Non C Sec Delay, T2 C
Sec Delay
Int blackboard: Shared:0..2
ArrangementofLLFSMs||**FischerDelaysByBooleanSensors**||.Thellfsms=(STARTER,THREAD_1,THREAD_2)
BooleanSensor=[(T1_Non_C_Sec_Delay:boolean),(T1_C_Sec_Delay:boolean),(T2_Non_C_Sec_Delay:boolean),(T2_C_Sec_Delay:boolean)]
IntegerWhiteboard=[(Shared:0..2)]
Constants=[Not_A_Thread=0]
STARTER(ID:0)turn(0)
WhiteboardVariablesinLHS=[Shared]
WBinLHSShared=[Shared]
THREAD_1(ID:1)turn(1)
WhiteboardVariablesinLHS=[Shared]
WBinLHSShared=[Shared]
LocalInteger=[(I_am_thread_T1:0..2)]
THREAD_2(ID:2)turn(2)
WhiteboardVariablesinLHS=[Shared]
WBinLHSShared=[Shared]
LocalInteger=[(I_am_thread_T2:0..2)]
dInitSTARTER(0)
START(1)
write"Initialisesharedvariable"
Shared::=Not_A_Thread
1:[true](Tid:00)
dInitTHREAD_1(0)
T1_NON_C_SEC(1)
write"T1noncriticalsection"
I_am_thread_T1::=1
1:[true](Tid:10)
T1_WAIT(2)
1:[T1_Non_C_Sec_Delay](Tid:11)
T1_ASSIGN(3)
Shared::=I_am_thread_T1
1:[(Not_A_Thread==Shared)](Tid:12) 1:[(NOT(I_am_thread_T1==Shared))](Tid:13)
T1_C_SEC(4)
write"T1criticalsection"
2:[true](Tid:14)
T1_LET_GO(5)
Shared::=Not_A_Thread
1:[T1_C_Sec_Delay](Tid:15)
1:[true](Tid:16)
dInitTHREAD_2(0)
T2_NON_C_SEC(1)
write"T2noncriticalsection"
I_am_thread_T2::=2
1:[true](Tid:20)
T2_WAIT(2)
1:[T2_Non_C_Sec_Delay](Tid:21)
T2_ASSIGN(3)
Shared::=I_am_thread_T2
1:[(Not_A_Thread==Shared)](Tid:22) 1:[(NOT(I_am_thread_T2==Shared))](Tid:23)
T2_C_SEC(4)
write"T2criticalsection"
2:[true](Tid:24)
T2_LET_GO(5)
Shared::=Not_A_Thread
1:[T2_C_Sec_Delay](Tid:25)
1:[true](Tid:26)
Figure 3: Initialisation for Fischer’s protocol.
et al., 2020) since the source is also an LLFSM model.
Second is a translation to SMV from models built with
Function Blocks of the IEC 61499 (Patil et al., 2015)
since, the machines inside function blocks have no
events, only guards (thus, these are LLFSM), and
events are handled outside the block on the interface
and by priority schemes (using timers). Third, some
degree of parallelism is achieved by (McColl et al.,
2022) by scheduling LLFSMs in groups of indepen-
dent, not communicating LLFSMs and inside groups
using a predefined round-robin schedule.
4 TRANSLATION
4.1 Example
Fischer’s protocol is a software-based approach re-
quiring no hardware support to ensure mutual exclu-
sion among multiple threads (Lamport, 1987; Lam-
port, 2005a; Lamport, 2005b; Lamport, 2024). Its
correctness has been validated multiple times. The
variable Shared identifies the thread in the critical
section and initially holds the predefined constant
NotAThread (see the STARTER machine in Fig. 3,
with index 0 in the arrangement).
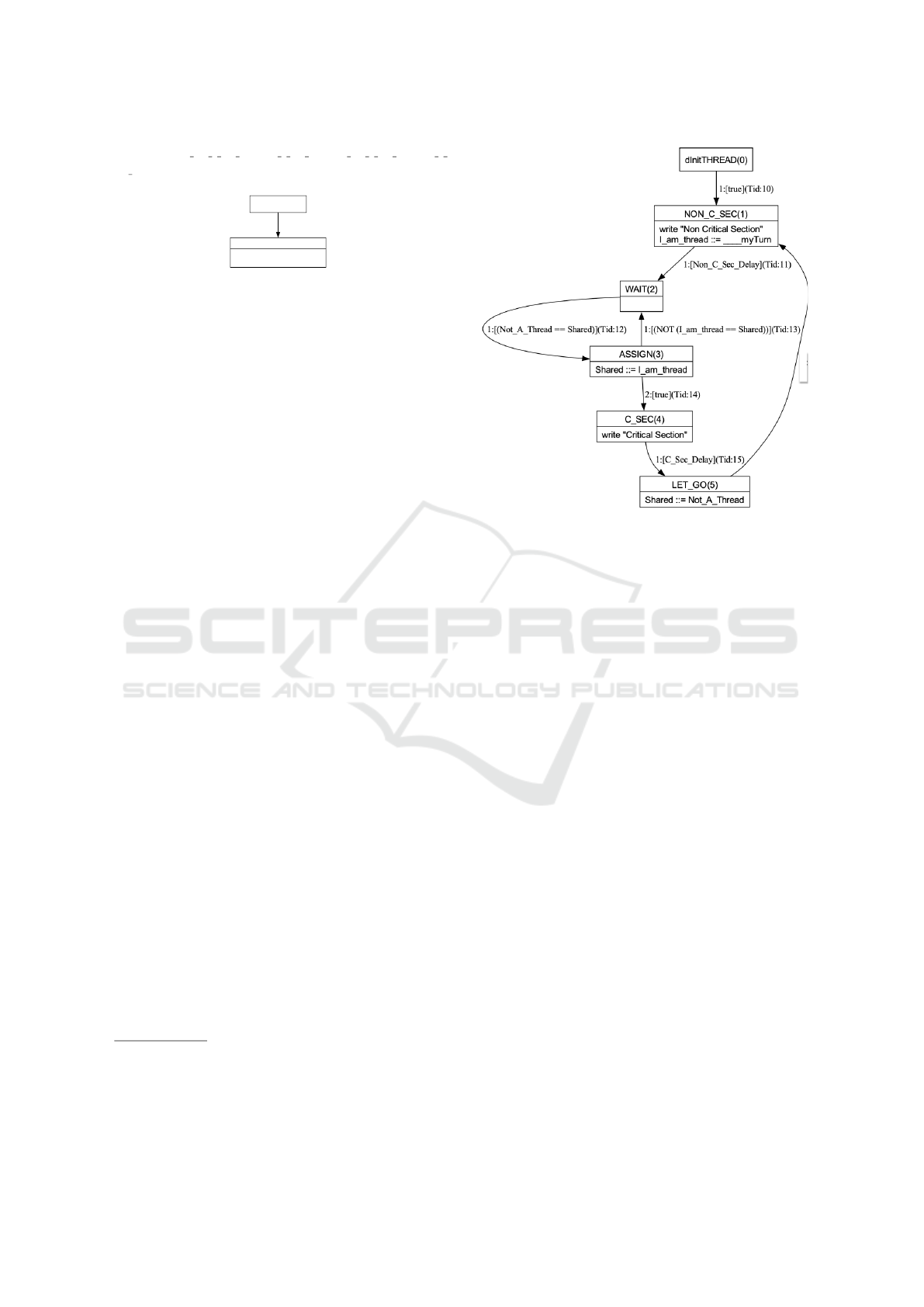
Each thread (Fig. 4) can spend an arbitrarily long
time both in its non-critical section and in its critical
section.
The protocol coordinates several copies of the
LLFSM in Fig. 4. For illustration, we use one LLFSM
modelling the Fischer’s protocol thread (Fig. 4) with
index 1 in the arrangement but with two copies (how-
ever, our tools allow to set the number k of threads).
In the translation, the threads are named ThreadID
with an ID ∈ {1, 2}
2
. Fischer’s protocol is a suit-
able example of multi-threaded system because each
thread gets a turn by a non-deterministic scheduler (at
any time any thread can be the next thread).
2
The transitions of LLFSM are identified with names
of the form Tid<machine index><transition index>. Thus,
the Tid00 in the name of the only transition in Fig. 3, but
Tid10, Tid11, Tid12, Tid13, Tid14, Tid15, and Tid16,
are the names of the transitions in Fig. 4.
1:[true](Tid:16)
Figure 4: The LLFSM corresponding to a thread.
4.2 Brief Introduction to LLFSMs
A system is comprised of an arrangement (i.e., a se-
quence of instances) of LLFSMs. Each LLFSM con-
sists of states and transitions. Time progresses as
the system executes code within a state; a transition
moves the execution from one state to another.
LLFSMs are extended machines, where exe-
cutable code can also be associated with a state in-
volving Boolean and integer variables. In line with
the principles of MDSD, we abstract the action lan-
guage for this executable code in a meta-model. The
LLFSMs presented here will not include sections
(or equivalently, they only have an OnEntry sec-
tion and its code is the code of the state). LLF-
SMs featuring states with sections (OnEntry, OnExit,
and Internal) can be model-to-model translated into
LLFSMs without sections and yet maintain equivalent
semantics (Carrillo et al., 2020).
A critical aspect of LLFSMs’ semantics is that
the execution of code statements within a state is
atomic: once execution reaches a state, the entire code
of the state is executed without interruption. This
atomicity is crucial for bridging the semantic gap be-
tween model checkers and executable implementa-
tions. However, it is possible to build non-atomic ver-
sions if the modeller desires to do so.
A state can serve as the source for multiple tran-
sitions, ordered in sequence ⟨l
0
, . . . , l
t
⟩. A transition
l
i
= (B
i
, t
i
) (where B
i
is the Boolean label and t
i
is
the target state) updates the machine current state to t
i
if B
i
evaluates to true and all labels in preceding tran-
MODELSWARD 2025 - 13th International Conference on Model-Based Software and Systems Engineering
18

sitions l
0
, . . . , l
i−1
evaluate to false. Therefore, at most
one transition can be activated at a time. A machine
updates its current state only when such LLFSM has
its turn and a transition has a Boolean expression that
evaluates to true. When it has its turn, the machine M
executes a ringlet atomically, that is:
1. M copies the current valuation v (the assignment
of all variables to their values),
2. it evaluates the Boolean expression of all transi-
tions leaving the current state in that fixed valua-
tion v,
3. it executes the code of the target state of the tran-
sition that fired and updates its current state to the
target state (or does nothing if no transition fires).
4.3 The Translation and Its Illustration
We present a model-to-text transformation enabling
the creation of a formal specification for TLA+ from
executable models of sequential, distributed, or multi-
threaded systems. (Carrillo et al., 2020) provided a
formal sequential semantics for an arrangement A of
LLFSMs.
Each machine must have a single initial state. The
case where a model requires a machine M with mul-
tiple initial states I
i
chosen non-deterministically can
be modelled with a simple transformation.
All machines begin in a pseudo-state (prefixed
with dInit) as their current state. The initial pseudo-
state contains only one transition, labelled “true”.
For each machine M , the first turn of M updates M ’s
current state (from the pseudo-state dInitM ) to M ’s
initial state. In our running example, STARTER will
execute first, initialising variable Shared that initially
has no value.
A TLA+ specification is the conjunction of three
formulas: Init, Next, and Liveness (Lamport, 2002).
Init ∧ □[Next]
vars
∧ Liveness.
Each formula serves the following purpose.
1. Specification of Initial States (Init): This for-
mula defines the initial Kripke states. Since
Kripke states are valuations, only those valuations
that make Init true are initial Kripke states.
2. Safety Specifications (Next): This second for-
mula defines which actions the system can per-
form and is a disjunction (∨) of formulas in the
form ψ
i
=⇒ φ
i
. Each formula ψ
i
=⇒ φ
i
indi-
cates there is a possible transition from any Kripke
state satisfying ψ
i
to any target Kripke state sat-
isfying φ
i
. Thus, ψ
i
=⇒ φ
i
describes possible
edges within the Kripke structure.
3. Liveness Specifications (Liveness): A third for-
mula specifies when a Kripke transition must be
taken.
We now describe the model-to-text transformation re-
sponsible for constructing these three components.
4.3.1 Constructing the Formula Init
A TLA+ specification starts with a declaration of the
variables. As each LLFSM maintains its current state,
we declare variables in TLA+ that serve as program
counters. For each machine M NAME, we declare a
variable M NAMEState.
Using the running example from Fig. 3 and Fig. 4,
we show the declaration of variables generated by our
tools. The TLA+ specifications and mathematical no-
tation we show next are the output of the coded trans-
lation (and text in grey are comments). For the Fis-
cher’s protocol arrangement, that has three machines
(a STARTER and two threads) we have three variables
that keep track of the current state of each machine.
The variables that represent the current state of a machine
VARIABLES STARTERState, THREAD 1State, THREAD 2State
LLFSMs have two primary types of variables. Lo-
cal variables (which are only visible to one machine)
and shared variables (with scope across the arrange-
ment). Shared variables are of four types: those
named blackboard variables (which can be both read
and written), those named sensor variables (that are
read only, but the environment can modify in an open
model), and effector variables (that are write only, and
the environment observes).
We show the definition of the variables of our run-
ning example. In TLA+, variable names cannot be du-
plicated, and we declare them so all variables are part
of the subscript of the weak fairness condition for the
Liveness formula (see Sec. 4.3.3). The user variables
are followed by the declaration of the variable turn.
Boolean sensor variables
, T1 Non C Sec Delay, T1 C Sec Delay
, T2 Non C Sec Delay, T2 C Sec Delay
Integer whiteboard variables
, Shared
The integer local variables of all machines
The integer local variables of machine THREAD 1
, THREAD 1 I am thread T1
The integer local variables of machine THREAD 2
, THREAD 2 I am thread T2
Which machine takes a turn
, turn
In TLA+, it is necessary to explicitly specify the
types of all variables as an invariant, represented by
LLFSMs to TLA+: A Model-to-Text Transformation of Executable Models Enabling Specification and Verification of Multi-Threaded and
Concurrent Systems
19

formulas in the form of Gϕ, where G is the LTL oper-
ator globally/always. This is achieved for the variable
that keeps the current state of the LLFSM by defining
that the potential values of the current state consist of
the states of the LLFSM, for each LLFSM.
For the example, we show only a few invariants,
but the translation includes one for each variable.
The type-correctness invariants
TypesTHREAD 1 I am thread T1OK
∆
=
THREAD 1 I am thread T1 ∈ {n ∈ Int : n ≥ 0 ∧ n ≤ 2}
TypesT1 Non C Sec DelayOK
∆
=
T1 Non C Sec Delay ∈ BOOLEAN
TypesSharedOK
∆
= Shared ∈ {n ∈ Int : n ≥ 0 ∧n ≤ 2}
Among the invariants is the constraint that the
scheduler keeps the value of turn to be the index of
one of the LLFSMs in the arrangement.
We now provide the predicate that defines the ini-
tial states of the Kripke structure. The formula is
named Arrangement NameInit and is a conjunction
of what is possible at the start of the system. Each ma-
chine Nachine Name will have its counter initialised
to the pseudo-state:
Nachine NameState = “dinitNachine Name”.
We express each variable as initially undefined but
holds some value in its domain. Consequently, there
exist numerous initial states in the Kripke structure,
encoding that execution can start with any combina-
tion of valuations for the variables. In our example,
before STARTER runs, the variable Shared can ini-
tially hold any value in its domain. The sensor vari-
ables with postfix Delay are controlled by the envi-
ronment, enabling each thread to stay in its critical or
non-critical sections for an undefined long time.
The variable turn is set to the first machine (with
index 0) in our example, but in general it could be
another value. Also, if we intended to implement an
arrangement of LLFSM where the arrangement could
start from any LLFSM, we would simply alter the
turn=0 statement to turn ∈ {0, 1, . . . , n}. This ad-
justment shows the first step towards furnishing the
multi-threaded or distributed semantics.
The initial predicate. Each machine starts in its initial state.
FischerInit
∆
= ∧ turn = 0
∧ STARTERState = “dInitSTARTER” ∧THREAD 1State = “dInitTHREAD 1”
∧ THREAD 2State = “dInitTHREAD 2”
∧ T1 Non C Sec Delay ∈ BOOLEAN
∧ T1 C Sec Delay ∈ BOOLEAN
∧ T2 Non C Sec Delay ∈ BOOLEAN
∧ T2 C Sec Delay ∈ BOOLEAN
∧ Shared ∈ {0, 1, 2}∧ THREAD 1 I am thread T1 ∈ {0, 1, 2}
∧ THREAD 2 I am thread T2 ∈ {0, 1, 2}
4.3.2 Constructing the Formula Next
In general, for every state s of every machine M in
the arrangement, we proceed to define the transitions
out of s. We write these transitions as a disjunction
because a machine M with a current state s and a se-
quence of transitions ⟨(e
1
, s
t1
), (e
2
, s
t2
), . . . , (e
t
, s
t
t
)⟩
(where s represents the current and source state,
s
t1
, s
t2
, . . . , s
t
t
are the target states, and e
1
, e
2
, . . . , e
t
are Boolean expressions) moves to a new Kripke state
if and only if {(e
1
, s
t1
) fires} ⊕ {(e
2
, s
t2
) fires} ⊕
··· ⊕ {(e
t
, s
t
t
) fires} ⊕ {no transition fires}, where ⊕
stands for exclusive or. Hence, a Kripke transition
occurs if and only if an LLFSM M has its turn, and
either: (a) the current state of M has a transition that
fires and no preceding transition with the current state
as the source state fires or (b) no transition fires (but
not both). If no transition fires, the system will still
progress as another LLFSM in the arrangement has
its turn.
Therefore, for every instance of a transition
(e
j
, s
t
j
) out of the current state s
i
for the machine
with turn t , we write a formula incorporating the fol-
lowing components.
T
t,j
∆
= ( turn = t ) ∧ (current State Variable = s
i
)
∧(∀v < j , ¬e
v
) ∧e
j
.
We illustrate this part of the translation with the
transition out of the state T1 WAIT to the state T1
ASSIGN:
T 12
∆
= turn = 1 ∧ THREAD 1State = “T1 WAIT”
∧ (Not A Thread = Shared)
This formula is the conjunction of three condi-
tions: the turn matches the machine number, the cur-
rent state is T1 WAIT, and the transition is labelled by
a test for equality (a Boolean formula) involving the
shared variable Shared.
A formula for the effect of a transition must be
specified for each transition in the system. In TLA+
we must continue the description of a step in the sys-
tem by specifying the new Kripke state (the new valu-
ation). The first effect of a firing transition from s
i
to
s
jt
is the update of the state. The program counter for
the state must be updated to the target state. Thus, the
definition of the transition continues with a conjunc-
tion with the following equality
∧ Machine NAMEState
′
= s
jt
.
In TLA+, the value of a variable in the next Kripke
state is primed.
For the example of transition T
12
of the second
thread in Fischer’s protocol, this means
∧ THREAD 1State
′
= “T1 ASSIGN”
The second effect is the atomic execution of the
OnEntry in the target state. This depends on the as-
signment statements in the target state. For the first
thread, arrival to the state T1 ASSIGN implies evalua-
tion of only one assignment.
∧ Shared
′
= THREAD 1 I am thread T1
MODELSWARD 2025 - 13th International Conference on Model-Based Software and Systems Engineering
20

There is a third part for each transition. For-
malisms like SMV and TLA+ must specify what hap-
pens with everything else. Crucially, everything else
remains unchanged, except for the sensor variables,
since the environment could modify such variables.
In TLA+, we specify this aspect of sensor variables,
indicating that their new value is some value in their
domain.
For the running example of THREAD 1, transition
T
12
continues as follows.
∧ UNCHANGED ⟨STARTERState, THREAD 2State⟩
∧ UNCHANGED ⟨THREAD 1 I am thread T1⟩
∧ UNCHANGED ⟨THREAD 2 I am thread T2⟩
∧ T1 Non C Sec Delay
′
∈ BOOLEAN
∧ T1 C Sec Delay
′
∈ BOOLEAN
∧ T2 Non C Sec Delay
′
∈ BOOLEAN
∧ T2 C Sec Delay
′
∈ BOOLEAN
LLFSMs can model open and closed models. An
open model can characterise the environment through
sensor variables. In this case, the potential successor
Kripke states are as many as the possible combina-
tions of assignments to the sensor variables. Closed
models, by contrast, are simpler because the environ-
ment can be modelled as an additional LLFSM and
sensor variables as blackboard (shared) variables. The
additional LLFSM provides values to those black-
board (shared) variables while other LLFSMs in the
arrangement read them.
For each transition, the next value of the variable
turn must be defined. However, how turn is updated
determines the difference between sequential execu-
tion, or multi-threaded or distributed system. Since
the update appears in all definitions of all transitions,
it can be factored out in the formula defining Next.
There is a possibility that no transition fires, in
which case every action-language variable remains
unchanged. This also must be specified for each ma-
chine M . We define a default formula indicating ev-
erything remains the same guarded by a conjunction
that all other transitions must evaluate to false.
We exemplify the default transition for the ma-
chine that corresponds to the first thread in Fischer’s
protocol.
T1condDefault
∆
= ∧ turn = 1
∧ (¬THREAD 1State = “dInitTHREAD 1”
∧ ¬(THREAD 1State = “T1 NON C SEC”
∧T1 Non C Sec Delay)
∧ ¬(THREAD 1State = “T1 WAIT” ∧ (Not A Thread = Shared))
∧ ¬(THREAD 1State = “T1 ASSIGN” ∧
(¬(THREAD 1 I am thread T1 = Shared)))
∧ ¬(THREAD 1State = “T1 ASSIGN” ∧ TRUE)
∧ ¬(THREAD 1State = “T1 C SEC”
∧ T1 C Sec Delay)
∧ ¬(THREAD 1State = “T1 LET GO” ∧ TRUE)
)
∧ UNCHANGED ⟨THREAD 1State⟩
∧ UNCHANGED ⟨STARTERState, THREAD 2State⟩
∧ UNCHANGED ⟨THREAD 1 I am thread T1⟩
∧ UNCHANGED ⟨THREAD 2 I am thread T2⟩
∧ UNCHANGED ⟨Shared⟩
∧ T1 Non C Sec Delay
′
∈ BOOLEAN
∧ T1 C Sec Delay
′
∈ BOOLEAN
∧ T2 Non C Sec Delay
′
∈ BOOLEAN
∧ T2 C Sec Delay
′
∈ BOOLEAN
Thus, the formula for the Next predicate is the dis-
junction because one of the machines is awarded the
turn, and that machine executes a transition, or if no
other transition fires, it fires its default transition. The
previous transitions must be false for each transition
to fire, and this pattern is also for the default transi-
tion, placed last. As the turn update happens in every
disjunct, as we anticipated, we can factor it out.
In the sequential execution of an arrangement with
n LLFSMs, the variable turn (not accessible to the
modeller) is assigned values in a round-robin fash-
ion: turn ← (turn + 1) mod n, typically starting
from turn ← 0. However, after factoring out the up-
date of the turn, it becomes clear that we can achieve
a multi-threaded (or distributed system) by adjusting
how the turn is updated. When modelling a multi-
threaded system, where the CPU can allocate the next
ringlet to any of the LLFSMs, the update of the turn
is non-deterministic:
turn
′
∈ {0, 1, 2}.
Therefore the generated Next formula for Fis-
cher’s example is as follows.
Move to a successor state in the Kripe Structure
FischerNext
∆
=
A non-deterministic scheduler advances some transition
turn
′
∈ {1, 2} ∧
The transitions of machine STARTER
∨ T 00 ∨ T 0condDefault
The transitions of machine THREAD 1
∨ T10 ∨ T11 ∨ T12 ∨ T 13 ∨ T 14 ∨ T 15 ∨ T 16 ∨ T 1condDefault
The transitions of machine THREAD 2
∨ T20 ∨ T21 ∨ T22 ∨ T 23 ∨ T 24 ∨ T 25 ∨ T 26 ∨ T 2condDefault
4.3.3 Constructing the Liveness Formula
The formula for Liveness should be a conjunction of
weak and/or strong fairness formulas for subactions
of Next since this guarantees that the specification is
machine closed (Lamport, 2002). We will not define
subactions or machine closedness. Arrangements of
LLFSMs always progress, even if the machine hold-
ing the turn lacks a transition that fires, the execu-
tion proceeds to the next machine. This implies the
absence of stuttering behaviours, where there are no
behaviours that continuously enable a step but do not
execute the step. Thus, we eliminate all potential stut-
tering behaviours using TLA’s construct for weak fair-
LLFSMs to TLA+: A Model-to-Text Transformation of Executable Models Enabling Specification and Verification of Multi-Threaded and
Concurrent Systems
21
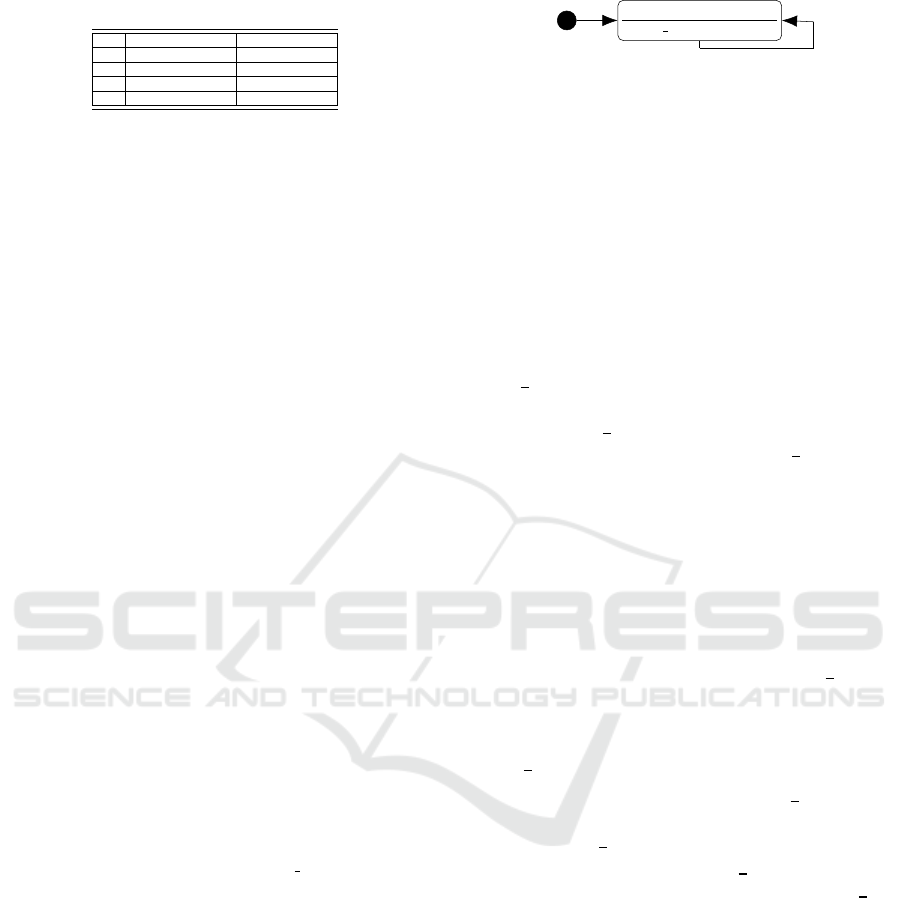
Table 1: Fischer’s mutual exclusion verification (sec).
k TLC NuSMV
5 3 ±0.5 1 ±0.05
6 27 ±1.1 5 ±0.11
7 166 ±1.4 25 ±0.32
8 1,085 ±5.1 95 ±0.43
ness WF. Adhering to the convention that vars repre-
sents the tuple of all variables,
Liveness
∆
= WF
vars
(Next),
where the formula WF
vars
(A) in TLA+ is defined
as (Lamport, 2002)
□(□ENABLED⟨A⟩
vars
⇒< A >
vars
)
and it states that, if A ever becomes forever enabled,
then an A step must eventually occur.
4.3.4 Using the Translation
Our translation enables the verification of the central
property of mutual exclusion expressed in TLA+ ex-
actly as discussed by Lamport (Lamport, 2005a) by
choosing TLC as our target model checker.
[](˜((THREAD_1State="T1_C_SEC")
/\(THREAD_2State="T2_C_SEC")))
Using our parallel translation, we can also for-
mally verify the mutual exclusion of any two threads
translating to SMV.
LTLSPEC G( !(THREAD_1.At_T1_C_SEC
& THREAD_2.At_T2_C_SEC))
Other properties checked on Fischer’s algorithm
are deadlock freedom and a progress property (Lam-
port, 2005b; Lamport, 2005a) that we can verify with
both model checkers. For instance, the following
Progress (Lamport, 2005a) property.
Progress ≜ (∃t ∈ Thread : pc[t] ∈ {WAIT , ASSIGN })
=⇒ (∃t ∈ Thread : pc = C SEC ).
This condition expresses that, “if some thread is
waiting to enter its critical section, then some thread
(not necessarily the same one) will eventually en-
ter” (Lamport, 2005a).
Different model checkers use different computa-
tional resources for verifying a property. At least for
Fischer’s algorithm, NuSMV is computationally faster
than TLC. We compared TLC with NuSMV repeating the
verification five times for each model checker on the
same computer. Table 1 shows average times (with
95% confidence intervals) verifying mutual exclusion
for five to eight threads with a unrestricted scheduler.
These results show that the coded translations are ef-
ficient.
initial
proxy turn ∈ {1, . . . , m}
Figure 5: A nondeterministic scheduler encoded as an
LLFSM.
4.3.5 The Translation’s Structure
There are two ways by which a sequential arrange-
ment of LLFSMs simulates the non-deterministic exe-
cution of a multi-threaded arrangement. The first ver-
sion adds a scheduler to the arrangement.
Definition 1. The LLFSM-scheduler version to
simulate multi-threaded execution of an arrange-
ment A = ⟨M
1
, M
2
, . . . , M
m
⟩ (where each M
i
is
an LLFSM) is a new sequential arrangement
A
′
= ⟨S , M
1
, M
2
, . . . , M
m
⟩ with a new variable
turn proxy, where A
′
is forced to start with its
first LLFSM S , the original variable turn in A is re-
placed by turn proxy, and S is a scheduler which
non-deterministically assigns the turn proxy of a
machine in A.
The second version adds a Boolean sensor vari-
able as conjunction with the existing Boolean expres-
sion of every transition.
Definition 2. The LLFSM-variable version to simu-
late multi-threaded execution of an arrangement A =
⟨M
1
, M
2
, . . . , M
m
⟩ (where each M
j
is an LLFSM) is a
new sequential arrangement A
′
= ⟨M
′
1
, M
′
2
, . . . , M
′
m
⟩
with a new Boolean sensor variable grant CPU, all
machines M
′
j
are copies of the corresponding ma-
chine M
j
except that all transitions T
i
= (e
i
, s
t
i
) of
the machines M
j
have been replaced by T
′
i
= (e
i
∧
grant CPU, s
t
i
) for machine M
′
j
, and
1. the environment cannot set grant CPU always
to false from any point forwards, (that is, in LTL:
G F grant CPU), and
2. if the environment sets grant CPU to true on ma-
chine M
j
’s turn, then it must sustain grant CPU
to true while M
j
evaluates all transitions out of its
current state.
The following proposition establishes that the seman-
tics of multi-threaded LLFSMs, can be used to obtain
faithful translations in two equivalent ways.
Proposition 1. The LLFSM-scheduler multi-threaded
execution and the LLFSM-variable multi-threaded ex-
ecution are equivalent.
Proof. First, we show that any sequence N =
⟨t
1
, t
2
, . . .⟩ (whether finite or infinite) of turns with
t
i
∈ {1, . . . , m} for the multi-threaded execution of
A is simulated by the round-robin execution of the
LLFSM-scheduler A
′
.
MODELSWARD 2025 - 13th International Conference on Model-Based Software and Systems Engineering
22

Let N = ⟨t
1
, t
2
, . . .⟩ be an arbitrary sequence of
non-deterministic turns of a multi-threaded execution
of A. The scheduler S is depicted in Fig. 5. It runs
once for every round-robin cycle, and thus, it can hap-
pen that when the scheduler is granted a turn for the
i-th time, it sets turn proxy to t
i
. Although the vari-
able turn is updated in a round-robin fashion by the
sequential execution, a machine M
i
in the arrange-
ment only reacts if turn proxy equals i. Otherwise,
M
i
does nothing. Thus, for each scan across the ar-
rangement, only one of the machines M
j
executes its
ringlet, precisely M
t
i
, when turn proxy equals t
i
.
Thus, the sequential execution of A
′
grants turns to
machines M
i
in the arrangement in exactly the se-
quence N of the multi-threaded execution of A.
We now proceed to the converse. We show that
any round-robin execution R of the simulator ar-
rangement A
′
corresponds to a multi-threaded exe-
cution of A. But let N = ⟨t
1
, t
2
, . . .⟩ the sequence
of values granted by the schedulers S to the vari-
able turn proxy on sequential execution R of A
′
.
The sequential execution only enacts machine M
t
i
on
each round-robin scan over arrangement A. Thus,
the multi-threaded execution with sequence of turns
N = ⟨t
1
, t
2
, . . .⟩ enacts the execution R.
Now we show that any sequence N = ⟨t
1
, t
2
, . . .⟩
(whether finite or infinite) of turns with
t
i
∈ {1, . . . , m} for the multi-threaded execution
of A is simulated by the round-robin execution of the
LLFSM-variable A
′
.
The idea is simple. In the round-robin execution
of A
′
, when turn equals t
i
(at the i-th sequential
scan), the environment sets grant CPU to false for
all machines in the scanning of the arrangement but
grant CPU is set to true for machine M
t
i
. Thus, all
transitions are guaranteed not to fire for all other ma-
chines. Machine M
t
i
evaluates its transitions with
grant CPU set to true, which is logically equivalent
as evaluating (true ∧ a)e = e for every Boolean ex-
pression e labelling its transitions. Thus, the only ac-
tions that happen in the round-robin execution of A
′
are those in the multi-threaded execution of A
′
.
For the converse, since the environment cannot
keep grant CPU set to false forever, some machine
m
i
will get a turn. Since the environment must keep
grant CPU true for all outgoing transitions of the cur-
rent state of M
i
this is equivalent to granting a turn in
a non-deterministic schedule to M
i
.
We have two immediate corollaries, one for TLA+
and the following which is the NuSMV version.
Corollary 1. Let P be a property. Using the NuSMV
translation of the LLFSM-scheduler version of an ar-
rangement A (modelling a multi-threaded system) to
verify P is equivalent to using the NuSMV translation
of the LLFSM-variable version of an arrangement A
(modelling a multi-threaded system) to verify P.
Since the LLFSM-variable version requires a deli-
cate interaction of when grant CPU is true, we prefer
the translation using the LLFSM-scheduler version.
Fischer’s protocol shows the case when there are
several copies of the same LLFSM. There are two
possible ways to perform the model-to-text transla-
tion of an arrangement when an LLFSM has several
instances. The first option uses facilities in specifica-
tions for NuSMV or for TLC to create several instances
of a module.
Definition 3. The LLFSM-module version to trans-
late a machine M with c copies in an arrangement
of LLFSMs consists in using the module facility of
the language L
C
to create specifications of a model
checker C, and to translate M to a module M
L
and
indicate that the L
C
-specification has c instances of
M
L
.
The second option is to use that SMV-specifications
and TLA+-specifications allow arrays.
Definition 4. The LLFSM-array version to translate
a machine M with c copies in an arrangement of
LLFSMs consists in using the array facility of the lan-
guage L
C
to create specifications of a model checker
C, and to translate M to a module M
L
, but for each
element a of M , create an array a:[1..c] in M
L
.
Proposition 2. At least for SMV and TLA+, the
LLFSM-module translation of an arrangement and
the LLFSM-array translation can be made equivalent.
We elected to use the LLFSM-module translation
for our implementations of the translation.
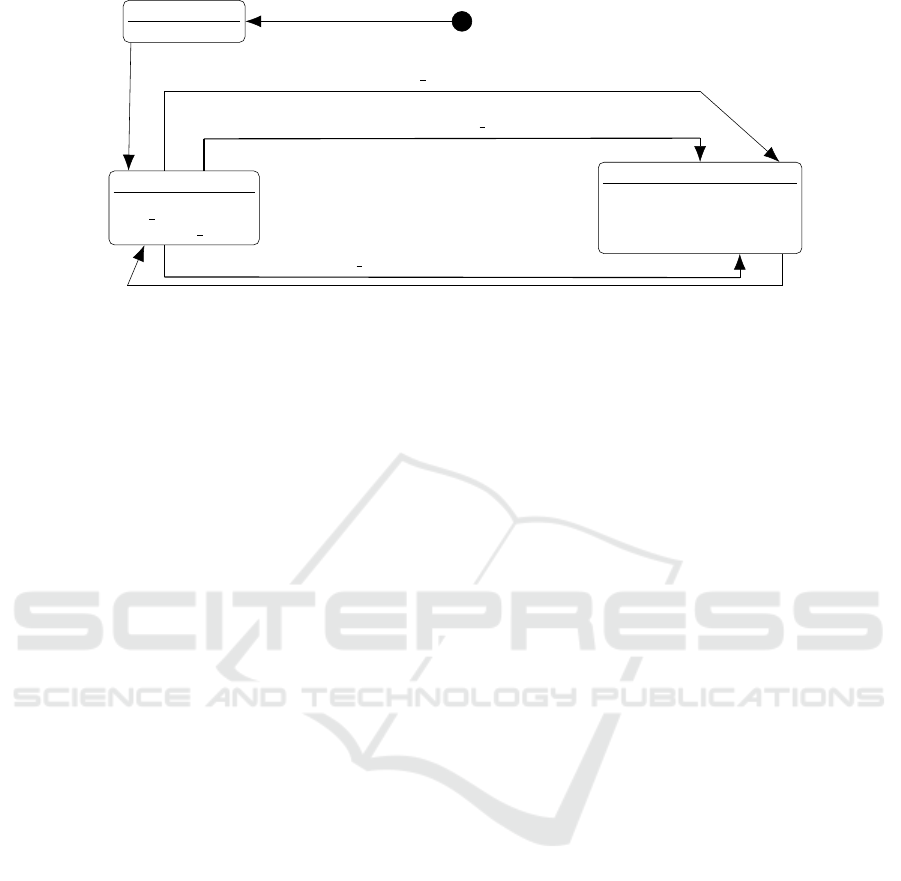
5 SCHEDULERS
In Fischer’s protocol, the unrestricted scheduler of
Fig. 5 may cause starvation. LLFSMs can be used
to define, and analyse properties of alternative sched-
ulers. We can verify the scheduler on its own or verify
an arrangement with a specific scheduler.
The scheduler of Fig. 5 is automatically translated
to SMV, and we can verify
Property 1 at any time, any thread in the future can
have a turn, and
Property 2 With two or more threads, at any point, for
any thread t, there is a path that starves t forever.
Because the scheduler of Fig. 5 allows a thread to mo-
nopolise the CPU, we formulate a new scheduler in
Fig. 6 controlling t LLFSMs. The arrangement can
include one starter LLFSM for set up. Here, for each
LLFSMs to TLA+: A Model-to-Text Transformation of Executable Models Enabling Specification and Verification of Multi-Threaded and
Concurrent Systems
23

thread i, we have a variable waiting
i
that counts how
long i has been waiting for the CPU. For this new
model, we also apply our model-to-text transforma-
tions. We confirm additional properties:
LTLSPEC -- If thread i has starved to the maximum, it will
eventually have a turn (no starvation)
G(Scheduler.waiting_i=g_c.MaxConsecutive
-> F Scheduler.waiting_i=0)
CTLSPEC -- Thread i can starve for the maximum
EF (Scheduler.waiting=g_c.MaxConsecutive )
Modelling with LLFSM is agnostic to the model
checker, and designers of behaviours can apply the
translation to a model checker with which they are
most comfortable enunciating verification properties.
LLFSMs provide abstraction from the programming
language for execution of the model. At first sight, the
mathematical notation of TLA+ appears to be more
expressive than SMV since it supports sets and func-
tions. However, NuSMV supports interactive simula-
tion (TLA+ only supports command-line trace gener-
ation). Also, TLA+ does not have all the operators
of LTL, notably, lacking X (Next) (Kr
¨
oger and Merz,
2008).
There are two fundamental types of properties
about real-time systems: upper bound and lower
bound (Lamport, 2005b). With t = 3 and MAX=4, we
show an example of each.
LTLSPEC G (!(w_b.the_Turn=i) -> F[0,11] w_b.the_Turn=i).
No thread, ever, waits for a turn more than 11
Kripke state transitions. Notice that this is a stronger
time-domain property as the operator F (eventually) is
replaced by a precise upper bound.
LTLSPEC G ((!(w_b.the_Turn=i)& Xw_b.the_Turn=i)
-> H[0,1]!(w_b.the_Turn=i))
Since X is missing, we have not found how to ex-
press these properties in TLA+. But the next section
illustrates an aspect feasible with SMV that seems more
comprehensive with TLA+.
6 DISCUSSION
Every time we translate to NuSMV, we run this model
checker with the option -ctt validating that the tran-
sition relation in the Kripke structure is total. Every
translation to TLA+ validates the invariants of vari-
ables within domains.
We provide further automation, offering the op-
tional generation of a series of sanity checks validated
by both model checkers. That is, for all states s in one
of the LLFSMs, the LTL
LTLSPEC (F s)
is automatically generated. Verifying such reachabil-
ity properties for all states s seems intuitively sound.
For closed models, such intuition is correct. How-
ever, the property may be false for open models be-
cause the environment never provides an input driv-
ing the behaviour to s. Nevertheless, this outcome is
informative. First, the designer can confirm that, in-
deed, the interactions that avoid s are always what is
expected. Secondly, the model can be closed with an
additional LLFSM that plays the role of the environ-
ment, resulting in a closed model.
For all states s that are the source of a transition,
the following sanity check
LTLSPEC G (s -> F (!s))
can optionally be generated. Intuitively, if a state s
is not terminal, then eventually, the behaviour must
leave s. Although this sanity check may be false in
open models, it is informative because it explicitly
reveals which paths, by interacting with the environ-
ment, freeze the behaviour of the LLFSM at s.
Transitions are the dual of states. Thus if T : s
s
→
s
t
is a transition in one of the LLFSMs of the arrange-
ment, intuitively, T must eventually fire.
LTLSPEC F (s & X t)
In TLA+, these properties must be expressed as ac-
tion properties using the globally operator and not the
eventually operator
3
.
¬¬♢(state = “s” ∧ state
′
= “t”) ≡
¬□(state ̸= “s” ∨ state
′
̸= “t”)
Then, we must use a box-action formula (Lamport,
2002).
□[state ̸= “s” ∨ state
′
̸= “t”] state
Note that we verify the negation, and we expect the
model checker to declare this formula invalid.
This offers another angle between NuSMV and TLC.
The sanity checks with properties with an eventually
form could be vacuously true. Thus, they should be
complemented by ensuring that the negation is false
and the model checker provides the trace. Although
TLC does this, the output of false properties is lengthy
and TLC (in command-line mode) halts when a prop-
erty is found to be false.
A significant added value is that users can request
the generation of sanity checks about the scheduling.
For the round-robin deterministic scheduler, with n
LLFSMs in the arrangement
3
Note that LTL’s G (globally/always) is □ in TLA+,
while LTL’s F (eventually) is ♢, & is ∧, and ! is ¬ in TLA+.
MODELSWARD 2025 - 13th International Conference on Model-Based Software and Systems Engineering
24
initial
∀i waiting
i
← 0
starter’s turn
theTurn ← 0
keep CPU ∈ {1, . . ., t}
i ← keep CPU
thread i’s turn
theTurn ← i
waiting
i
← 0
∀j ̸= i waiting
j
←
(waiting
j
+ +) mod (MAX + t)
.
.
.
true
T1:(waiting
1
≥ MAX) ∨ ((keep CPU == 1)
V
j ̸=1
(waiting
j
< MAX))
true
T2:(waiting
2
≥ MAX) ∨ ((keep CPU == 2)
V
j ̸=2
(waiting
j
< MAX))
Tt:(waiting
t
≥ MAX)
∨((keep CPU == t)
V
j ̸=t
(waiting
j
< MAX))
Figure 6: A fair scheduler encoded as an LLFSM.
LTLSPEC
G ( (turn=0 & X turn=1)
...
| turn=t-2 & X turn=t-1)
| turn=t-1 & X turn=0)
)
is the sanity-check.
7 CONCLUSION
Time-triggered architectures require careful tuning
of time step frequencies. In event-driven software,
such as web or GUI applications with simple user
inputs, assumptions about time gaps between events
typically hold. However, in cyber-physical systems,
the large number of connected sensors drastically in-
creases event frequency. UML statecharts have sev-
eral features that reduce their understandability for
developers, while LLFSMs present different but com-
parable issues (Estivill-Castro and Hexel, 2019).
By analysing schedulers for arrangements of LLF-
SMs we can now handle multi-threaded systems and
distributed systems. We eliminated semantic gaps by
ensuring that verification traces are consistent with
executions in C or MIPS. There is a possibility that
the translation implementation is faulty. However,
regular comparison of the executable models (Lisp,
MIPS, C) and using two model checkers reduces this
risk. The next step is to formally verify the translation
tool, which we consider feasible because each meta-
model element follows a rule, similar to the recursive
rules used in ATL transformations that can be verified
by induction.
We keep a single representation and provide trans-
lations of such a representation to both programming
and model-checker languages, thus, experts in one
language need not become experts in others. Re-
call that programming languages differ significantly
from the languages used by model checkers. “As
TLA+ is math-based, it comes with a difficult learn-
ing curve and might appear intimidating to software
engineers” (Caballar, 2023). Thus, a top priority is
to “translate a high-level TLA+ design directly into
code” (Caballar, 2023). We believe our approach
contributes to the simultaneous development of exe-
cutable code and simultaneous verification.
More translations beyond C, LISP, MIPS, TLA+,
and SMV would be desirable, but such efforts can be
performed with current translations as translations of
reference. Such validation against all previous trans-
lations aids significantly in eradicating semantic gaps
and errors from implementing new translations.
REFERENCES
Andr
´
e, E., Liu, S., Liu, Y., Choppy, C., Sun, J., and Dong,
J. S. (2023). Formalizing UML state machines for au-
tomated verification – a survey. ACM Comput. Surv.,
55(13s).
Bellotti, M. (2019). Introduction to TLA+ model
checking in the command line. Software Safety
medium.com/software-safety. [Online; accessed 29-
05-24].
Besnard, V., Brun, M., Jouault, F., Teodorov, C., and
Dhaussy, P. (2018). Unified LTL verification and em-
bedded execution of UML models. 21th ACM/IEEE,
MODELS, p. 112–122, NY, USA. ACM.
Brooks, R. (1990). The behavior language; user’s guide.
TR AIM-1227, MIT, Dep. Elec. CS.
Bucchiarone, A., Cabot, J., Paige, R. F., and Pierantonio, A.
(2020). Grand challenges in model-driven engineer-
ing: an analysis of the state of the research. Software
and Systems Modeling, 19(1):5–13.
Caballar, R. D. (2023). TLA+ helps programmers squash
bugs before coding. IEEE Spectrum.
Carrillo, M., Estivill-Castro, V., and Rosenblueth, D. A.
(2020b). Verification and simulation of time-domain
properties for models of behaviour. Revised papers
Int. Conf., MODELSWARD, vol. 1361 CCIS, p. 225–
249. Springer.
LLFSMs to TLA+: A Model-to-Text Transformation of Executable Models Enabling Specification and Verification of Multi-Threaded and
Concurrent Systems
25

Carvalho, A. (2019). TLA+, Event B comparison. [Online;
accessed 1-12-23].
Cengic, G. and Akesson, K. (2010). On formal analysis
of IEC 61499 applications, part A: Modeling. IEEE
Trans. Industrial Informatics, 6(2):136–144.
Estivill-Castro, V. (2021). Tutorial activity diagrams with
Moka and unsafe race conditions. https://www.
youtube.com/watch?v=P1KX2dBjmO8.
Estivill-Castro, V., Carrillo Barajas, M., and
Rosenblueth, D. A. (2024). How to use
javallfsmstransformation and its asso-
ciated tools. https://mipal.net.au/Downloads/
HowToUseM2T.pdf.
Estivill-Castro, V. and Hexel, R. (2019). The understand-
ability of models for behaviour. Revised papers 7th
Int. Conf., MODELSWARD, vol. 1161 CCIS, p. 50–
75. Springer.
Furrer, F. (2019). Future-Proof Software-Systems: A Sus-
tainable Evolution Strategy. Springer, Berlin.
Guermazi, S., Tatibouet, J., Cuccuru, A., Seidewitz, E.,
Dhouib, S., and G
´
erard, S. (2015). Executable mod-
eling with fUML and Alf in Papyrus: Tooling and ex-
periments. 1st Int. Workshop on Executable Modeling
co-located with ACM/IEEE 18th MODELS, vol. 1560
CEUR, p. 3–8.
Hawblitzel, C., Howell, J., Kapritsos, M., Lorch, J. R.,
Parno, B., Roberts, M. L., Setty, S., and Zill, B.
(2015). IronFleet: proving practical distributed sys-
tems correct. 25th Symp. on Operating Systems Prin-
ciples, SOSP, p. 1–17, NY, USA. ACM.
Konnov, I., Kuppe, M., and Merz, S. (2022). Specifica-
tion and verification with the TLA+ Trifecta: TLC,
Apalache, and TLAPS. Leveraging Applications of
Formal Methods, Verification and Validation, p. 88–
105, Springer.
Kr
¨
oger, F. and Merz, S. (2008). Temporal logic and state
systems. Texts in Theoretical Computer Science. An
EATCS Series. Springer.
Kuppe, M. A. (2023). Teaching TLA+ to engineers at Mi-
crosoft. Formal Methods Teaching Workshop, LNCS,
vol 13962, p. 66–81, Springer.
Kurshan, R. P. (2018). Transfer of model checking to in-
dustrial practice. Handbook of Model Checking, p.
763–793, Springer.
Kwon, G. (2000). Rewrite rules and operational semantics
for model checking UML statecharts. UML 2000 —
The Unified Modeling Language, LNCS, vol 1939, p.
528–540, Springer.
Lamport, L. (1987). A fast mutual exclusion algorithm.
ACM Trans. Comput. Syst., 5(1):1–11.
Lamport, L. (2002). Specifying Systems: The TLA+ Lan-
guage and Tools for Hardware and Software Engi-
neers. Addison-Wesley, USA.
Lamport, L. (2005a). Real time is really simple. MSR-
TR-2005-30, Microsoft Research, Dept. of Electron-
ics and Computer Science.
Lamport, L. (2005b). Real-time model checking is re-
ally simple. Correct Hardware Design and Verifica-
tion Methods, 13th IFIP Advanced Research Work-
ing Conf., CHARME, vol. 3725 LNCS, p. 162–175.
Springer.
Lamport, L. (2024). A science of concurrent programs. ver-
sion 7th June. https://lamport.azurewebsites.net/tla/
science.pdf.
Latella, D., Majzik, I., and Massink, M. (1999). Automatic
verification of a behavioural subset of UML statechart
diagrams using the SPIN model-checker. Form. Asp.
Comput., 11(6):637–664.
Mart
´
ınez, Y., Cachero, C., and Meli
´
a, S. (2012). Evaluat-
ing the impact of a model-driven web engineering ap-
proach on the productivity and the satisfaction of soft-
ware development teams. Web Engineering, ICWE,
LNCS, vol 7387, p. 223–237, Springer.
McColl, C., Estivill-Castro, V., McColl, M., and Hexel,
R. (2022a). Decomposable and executable models
for verification of real-time systems. Revised papers
9th Int. Conf., MODELSWARD, vol. 1708 of CCIS, p.
135–156. Springer.
Merz, S. (2019). Formal specification and verification, p.
103–129. ACM, NY, USA.
Moreira, G., Vasconcellos, C., and Kniess, J. (2022). Fully-
tested code generation from TLA+ specifications. 7th
Brazilian Symp. Systematic and Automated Software
Testing, SAST ’22, p. 19–28, NY, USA. ACM.
Newcombe, C., Rath, T., Zhang, F., Munteanu, B., Brooker,
M., and Deardeuff, M. (2015). How Amazon web
services uses formal methods. Commun. ACM,
58(4):66–73.
Nicol
´
as, J. and Toval, A. (2009). On the generation of re-
quirements specifications from software engineering
models: A systematic literature review. Information
and Soft. Technology, 51(9):1291–1307.
Niyogi, R. and Nath, A. (2024). Formal specification and
verification of a team formation protocol using TLA+.
Soft.: Practice and Experience, 54(6):961–984.
Patil, S., Dubinin, V., and Vyatkin, V. (2015b). Formal ver-
ification of IEC61499 function blocks with abstract
state machines and SMV – modelling. IEEE Trust-
com/BigDataSE/ISPA, vol. 3, p. 313–320.
Pham, V. C., Radermacher, A., G
´
erard, S., and Li, S.
(2017). Complete code generation from UML state
machine. 5th Int. Conf. Model-Driven Engineering
and Software Development, MODELSWARD, p. 208–
219. SciTePress.
Posse, E. and Dingel, J. (2016). An executable formal se-
mantics for UML-RT. Softw. Syst. Model., 15(1):179–
217.
Sahu, S., Schorr, R., Medina-Bulo, I., and Wagner, M. F.
(2020). Model translation from Papyrus-RT into the
nuXmv model checker. Software Engineering and
Formal Methods. SEFM, vol. 12524 LNCS, p. 3–20.
Springer.
MODELSWARD 2025 - 13th International Conference on Model-Based Software and Systems Engineering
26
