
Privacy-Preserving Self-Organization in Distributed Energy Scheduling
Joerg Bremer
1
and Sebastian Lehnhoff
2
1
Department of Computing Science, University of Oldenburg, Uhlhornsweg, Oldenburg, Germany
2
R&D Division Energy, OFFIS – Institute for Information Technology, Escherweg, Oldenburg, Germany
fi
Keywords:
Privacy Preservation, Distributed Optimization, Multi-Agent Systems, Secret Sharing.
Abstract:
Negotiation among agents that are controlling and orchestrating a set of distributed processes often relies on
frequent data exchange to allow solution evaluation and thus convergence towards a joint solution. Solving
decentralized coordination problems with coalitions of agents that exchange messages and information to build
beliefs for problem solving, inevitably allows insight into other agents’ operational options. Keeping local
information private is thus of utmost importance for a wide user acceptance of such algorithms. We present an
extension to a distributed, self-organizing algorithm for energy scheduling in virtual power plants or energetic
neighborhoods that keeps all information about possible operations of participating energy resources private.
For calculations during optimization the algorithm relies on secret sharing and joint multi-party computations.
We evaluate the algorithm against the original non privacy-preserving standard version and present some
insights for future work.
1 INTRODUCTION
Multi-agent systems are widely seen as one of the
most promising solutions for optimization and asyn-
chronous coordination in future, autonomous cyber-
physical systems like the energy grid (Stark et al.,
2024). Digitalized energy systems can be character-
ized by a high degree of complexity in monitoring and
controlling a large number of distributed energy re-
sources. The infrastructure is dynamically optimized
with regard to generation, consumption, load flow,
supply quality and safety, cost, comfort, and more.
Multi-agent systems are widely seen as the best
tool to integrate autonomy by self-organization prin-
ciples and to cope with the specific problem charac-
teristics in the smart grid (Ramchurn et al., 2012).
Whereas trust has been on the research agenda
in multi-agent systems for years (Ramchurn et al.,
2004), privacy has received less attention so far. Trust
is a major issue when humans have to interact with a
system. Many CEOs identify trust and reputation as
the key driver of their action. On the other hand, pri-
vacy is just as important for a broad acceptance of dis-
tributed, agent-based algorithms (Rapp and Bremer,
2023).
An example is given by the predictive scheduling
use case. In virtual power plants (VPP), a task that
has often to be solved is the scheduling problem that
assigns an optimal operation schedule to each energy
resource. Of course, the algorithm has to take into ac-
count a set of objectives like accurate resemblance of
the desired load profile, robustness of the schedule,
costs, remaining flexibility for subsequent planning
periods, and many more (Stark et al., 2024; Bremer
and Lehnhoff, 2020a). A schedule in this context is
a real-valued vector with each element denoting the
amount of energy (or mean active power) generated
or consumed during the respective time interval for
a given future discrete planning horizon. A simple
predictive scheduling algorithm just tries to assign a
schedule to each energy resource such that the sum of
all schedules resembles a desired aggregated schedule
as close as possible. Such aggregated schedule might
for example be the result of some market bidding and
the VPP wants to jointly operate this schedule.
As a distributed, self-organizing solution to pre-
dictive scheduling, (Hinrichs et al., 2013) proposed
the combinatorial optimization heuristic for dis-
tributed agents (COHDA). COHDA was proposed as
a solution to problems that can be decomposed on
an algorithmic level (Talbi, 2009) and can thus be
adapted to a wide range of different problems (Stark
et al., 2021; Narayanan et al., 2024; Bremer and
Lehnhoff, 2017b; Bremer and Lehnhoff, 2017a). The
general concept is closely related to Cooperative Co-
evolution (Potter and Jong, 2000). The key concept of
Bremer, J. and Lehnhoff, S.
Privacy-Preserving Self-Organization in Distributed Energy Scheduling.
DOI: 10.5220/0013094900003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 1, pages 253-262
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
253

COHDA is an asynchronous iterative approximative
best-response behavior that relies on collected infor-
mation from other agents for own decision making.
In the predictive scheduling use case in VPPs,
operable schedules are frequently exchanged (Hin-
richs and Sonnenschein, 2017) that contain informa-
tion about time and possible energy generation and/
or consumption schemes – often for a whole day with
15 minute (or smaller) time resolution. These sched-
ules are needed by the agents to calculate the dis-
tance of the joint schedule to the wanted target sched-
ule to evaluate solution candidates during local de-
cision making. Each schedule contains data of the
possible portion of energy that may be generated (or
consumed) during a given time period for a series of
multiple time intervals. With each negotiation round,
a new possible operable schedule is sent to several
other agents together with transient information on
other agents’ schedules. This is related to the widely
used gossiping principle that comes into play in many
distributed optimization algorithms (Poli, 1996). The
sent information can be collected, aggregated, and ex-
ploited by other agents.
Simulation examples for exploitation can be found
in (Dabrock, 2018), where detailed information on in-
ternal processes like heating profiles, and thus work-
ing hours, machinery load factors, or current capacity
utilization were derived. Moreover, in (Bremer and
Lehnhoff, 2022) individual time of use tariffs were
reconstructed from aggregated, collected schedules.
Parties that are potentially interested in participat-
ing in distributed energy management – e.g. in vir-
tual power plants (Naval and Yusta, 2021) or in en-
ergy neighborhoods (Wehkamp et al., 2020) – will
likely refrain from engaging in agent-based coordi-
nation if the risk of revealing data is larger than the
benefit from participating. In order to achieve a broad
acceptance of such algorithms, it is essential to handle
the disclosure of data sparingly or to otherwise ensure
that it cannot be misused.
We extended the meanwhile widely used COHDA
protocol by integrating privacy preservation through
secret sharing. In this way, no schedules with pri-
vate information have to be sent around anymore and
all calculations for solution candidate evaluation are
done jointly in a way that no party can reveal any in-
formation of a single agent’s energy resource.
The rest of the paper is organized as follows. We
start with an overview on existing privacy concepts
in multi-agent systems and the smart grid. After de-
scribing the standard COHDA algorithm, we identify
the privacy gap and develop the integration of secret
sharing for keeping information private. Finally, we
evaluate privacy-preserving COHDA and its perfor-
mance with regard to solution quality, message vol-
ume and convergence.
2 RELATED WORK
Privacy is probably one of the oldest human concerns
(Schoeman, 1984; Schermer, 2007). Nevertheless,
with the advent of delegating more and more tasks
to autonomous systems that act on behalf of a user
ambiantly in the background, the technical perspec-
tive grows significantly in importance. For the infor-
mation technological perspective several taxonomies
for classification have been proposed, e.g. (Spiek-
ermann and Cranor, 2009; Bostwick, 1976; Kang,
1997). Thus, privacy as a unitary concept with a uni-
form value (Such et al., 2014).
According to (Solove, 2005), privacy can be
threatened by three main information-related activi-
ties: information collection, processing, and dissemi-
nation. The use case of self-organized, distributed en-
ergy scheduling covers all three and therefor requires
special attention and a holistic solution that covers
the complete algorithmic approach (Rapp and Bre-
mer, 2023). Due to the algorithmic level decomposi-
tion of the solved problem (Talbi, 2009), energy gen-
eration or consumption schedules are collected from
other agents, are processed several times to calculate
the objective value of different solution candidates
and are eventually disseminated to other agents for
further decision making. This general scheme occurs
(at least partly) also in other distributed solutions to
the problem, e.g. in (Bremer and Lehnhoff, 2016).
When it comes to privacy prevention measures in
multi-agent systems in general, several approaches
have already been developed. Some good overviews
can be found in (Such et al., 2014; Chandramohan
et al., 2015). For algorithmic applications, some ef-
fort has been put into consensus algorithms (Wang
et al., 2021; Fiore and Russo, 2019), but for dis-
tributed optimization only few examples using en-
cryption can be found. For example, (Huo and Liu,
2021) uses the Pailler cryptosystem (Wu et al., 2016)
with some inefficiency issues (Peng et al., 2004).
For the energy domain, several surveys explore so-
lutions for different use cases: e.g. for vehicle to grid
applications, communication, or metering (Han and
Xiao, 2016; Kumar et al., 2019; Finster and Baum-
gart, 2015). These works cover the collection per-
spective and are not concerned with any algorithmic
use of the data. As possible technologies for secur-
ing distributed optimization algorithms against pri-
vate data leakage, two techniques seem to be most
promising: (partial) homomorphic encryption and
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
254
multiparty computation based on secret sharing (Rapp
and Bremer, 2023).
The concept of homomorphic encryption was
originally introduced as privacy homomorphism by
(Rivest et al., 1978). The first working fully ho-
momorphic encryption scheme has been proposed in
2009 by (Gentry, 2009) whereas partially homomor-
phic schemes have been known for longer. Since
then, great progress regarding performance and ap-
plicability has been made (Meftah et al., 2022; Moore
et al., 2014). But, this issue is still not fully solved.
In general, homomorphic encryption allows for arbi-
trary commutations to be conducted on the encrypted
data without a need to decrypt it first. The result is
then a cypher text or number in the same cryptosys-
tem. Good overviews on fully homomorphic encryp-
tion schemes can be found in (Marcolla et al., 2022).
Partially homomorphic encryption schemes are
often more efficient but support just a subset of op-
eration, e.g. multiplication or addition only. Ex-
amples can be found in (Wu et al., 2016; Guo
et al., 2022; Mikhail et al., 2014). Also sim-
ple order-preserving schemes exist (Agrawal et al.,
2004). Order-preserving encryption had previously
been used for predictive scheduling in energy man-
agement in the smart grid in (Bremer and Lehnhoff,
2020b). But, in order to make it work, the solved op-
timization problem had to be reformulated, what lim-
its the approach to a simplified problem version. The
results can thus not be generalized. This seems to be
the general case because no efficient higher level op-
erations are supported that are usually needed in eval-
uating solution candidates in optimization.
Homomorphic encryption is still computationally
rather expensive and would slow down an optimiza-
tion process significantly (Alaya et al., 2020; Moore
et al., 2014) or require extensive GPU or in-memory
calculations (Meftah et al., 2022; Reis et al., 2020;
Al Badawi et al., 2018) that cannot be guaranteed
in the field in smart grid applications. Additionally,
homomorphic encryption with a public key scheme
(Rothblum, 2011) rather supports client-server or
peer-to-peer structures instead of agent coalitions as
in our use case. The ability to decrypt the result also
allows for decrypting the used data.
A different approach for keeping privacy relies on
the idea of secret sharing. In a secret-sharing scheme,
a dealer shares a secret with n parties P by distributing
shares to the parties such that: (Beimel, 2011):
1. given a set A of subsets of the n parties (the access
structure), a subset in A can reconstruct the secret
from the shares (all in the subset are needed),
2. no one outside A can reveal any (partial) informa-
tion of the secret.
perceive
decide
act
𝐾
for each agent in neighbours
inbox
Sum up most
recent schedules of
other agents
private search
space and
preferences
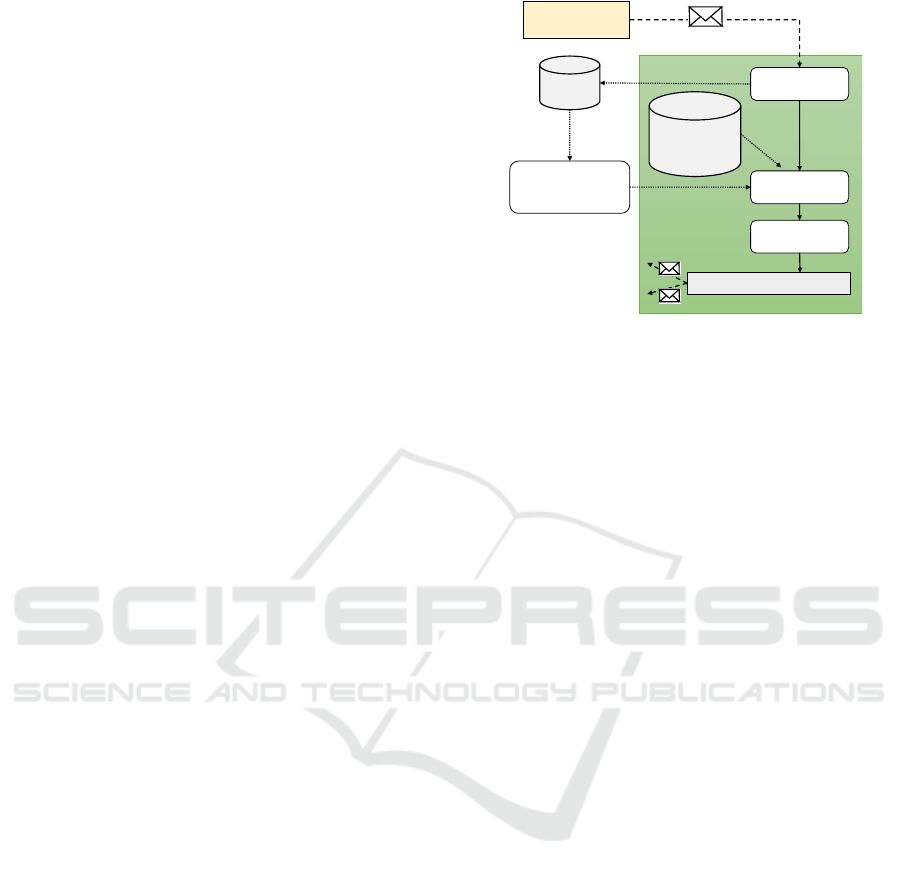
Figure 1: Flow chart for a single agent in standard COHDA.
This process chain is started each time a message arrives in
the in-box of the agent.
Often, A equals P; except for example in (Dawson
and Donovan, 1994). Hence, all members of P to-
gether are needed to reveal the secret (Gordon and
Katz, 2006). Several applications of secret sharing
for distributed computing can be found for exam-
ple for Byzantine agreement (Rabin, 1983), securing
multiparty computations (Ben-Or et al., 2019; Chaum
et al., 1988), threshold cryptography (Desmedt and
Frankel, 1991), access control (Naor and Wool,
1996), or generalized oblivious transfer (Tassa, 2011).
We used a scheme of secret sharing where each share
constitutes a random part of a horizontally strati-
fied schedule – a vector of random shares of active
power for each time interval – and used multi-party-
computation (Catalano et al., 2005) to prepare objec-
tive evaluation in our distributed self-organizing algo-
rithm. In this way the computationally expensive part
has to be conducted only once for each agent decision.
3 ALGORITHM
3.1 COHDA
An asynchronous iterative approximate best-response
behavior is the core idea of COHDA. Each agent is re-
sponsible for one dimension of the algorithmic prob-
lem decomposition. The intermediate local solutions
of other agents (represented by published decisions)
are regarded as temporarily fixed. Thus, each agent
only searches along a low-dimensional cross-section
of the search space and thus has to solve merely a
simplified sub-problem. Nevertheless, for evaluation
of the solution, the full objective function is used af-
ter aggregation of all agent’s contributions. In this
way, the approach achieves an asynchronous coordi-
Privacy-Preserving Self-Organization in Distributed Energy Scheduling
255

nate descent with the additional ability to escape local
minima by parallel searching different regions of the
search space; and because former decisions can be re-
vised if newer information becomes available.
Hence, all agents coordinate themselves by up-
dating knowledge and exchanging information about
each other that supports local decision-making. For
message exchange, the agents are logically drawn to-
gether by an artificial communication overlay net-
work. Most often, a small world topology (Watts and
Strogatz, 1998) is used for this purpose. Starting with
an arbitrarily chosen agent and by passing it a mes-
sage containing just the global objective, each agent
repeatedly goes through three stages: perception, de-
cide, and act.
perception stage. In this first phase, the
agent prepares for local decision-making based
on incoming information. Every time an agent
receives a message from one of the neighboring
agents that precede in the directed communication
topology, it aggregates the data that is included
in the message(s) into the own knowledgebase K.
Each message contains two essential pieces of in-
formation: the result of the updated local decision
of the sending agent and the transient informa-
tion about decision updates of other agents that
led to this decision. The important privacy issue is
that this information contains operation schedules
of all other agents (or rather of their controlled
energy resources respectively) and probably also
cost annotations for these schedules.
decision stage. In this second phase, the
agent is making a local decision on a schedule for
the own controlled energy resource that puts the
coalition forward as best as possible. To do this,
a local optimization is solved. The agent deter-
mines the gap to the optimal solution by summing
up the schedules (that are the results of the most
recent decisions) of all other agents and by calcu-
lating the difference to the wanted target sched-
ule. To do this, the agent needs to know the deci-
sions of the others. During optimization, the agent
searches for the local schedule that fills the gap as
best as possible. As constrained-handling tech-
nique for the individual constraints of the energy
resource, often a decoder approach is used (Bre-
mer and Sonnenschein, 2013).
act stage. During this last phase, the agent com-
pares the best found solution with the previous so-
lution by using the global objective function. If
the new solution is better, the agent broadcasts
a message containing its new local solution con-
tribution together with everything it has learned
from preceding agents and their current local solu-
tion contributions (the decision base) to the imme-
diate neighbors in the communication topology.
Upon these messages, the receiving agents then
also go through these three stages, what in turn
may lead to revised local solution contributions
and thus to a further improved overall solution.
If no local solution can be found that improves the
overall solution, no message is sent and the process
ceases. After the system has generated a series of
intermediate solution candidates, the heuristic even-
tually terminates in a state where all agents know an
identical solution. This one is taken as the final so-
lution of the negotiation. Properties like guaranteed
convergence and local optimality have been formally
proven in (Hinrichs and Sonnenschein, 2017).
3.2 Adding Privacy
In order to enable privacy preservation in COHDA,
we need to get rid of sending plain schedule infor-
mation to other agents. We achieve this goal by us-
ing a secret sharing approach. To do this, the local
process of summing up the schedules of all the other
agents was replaced by a joint summation that incor-
porates all agents; with each agent knowing only a
random part of the information. In privacy COHDA
schedules are stored locally so that only the agent that
controls a device knows the schedules that have been
selected as possible contributions to solution candi-
dates. Because each agent has to store several sched-
ules during the course of a negotiation and because
also older schedules need to be kept (for comparison
and because several paths are searched in parallel), we
chose a hash map for local storage. Only the identi-
fying hash code is sent to other agents instead of the
plain schedule. Any identifier type would do.
In standard COHDA an agent a
j
(for the set of all
agents A) evaluates solution candidates (single objec-
tive case) during decision making by calculating
e = δ
|A|
∑
i=1
x
x
x
i
,ζ
ζ
ζ
!
, (1)
where δ represents a distance measure (often || · ||
2
)
that measures the similarity between the joint sched-
ule of all agents (that includes solution candidate x
j
of agent a
j
) and the target schedule ζ. This can be
converted to
e = δ
x
x
x
j
+
∑
a
i
∈A\a
j
x
x
x
i
,ζ
ζ
ζ
→
x
x
x
j
∈F
a
j
min. (2)
Thus, we need the sum of schedules of all other agents
to combine with our own solution candidates x
j
for
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
256
COHDA
msg?
perceive
yes
no
store
act: store locally
and send hash
sum up and
decide
initialize sum
sum up
split
request ?
partial
schedule?
partial
sum ?
all parts
received?
split and send
partial schedules
sleep until next asnyc. message comes in
store
all parts
received?
for each agent in MAS
send split
request
for each agent in MAS
for each agent in neighbors
inbox
no
yes
no
no
yes
no
yes
yes
no
yes
Send to
initiator
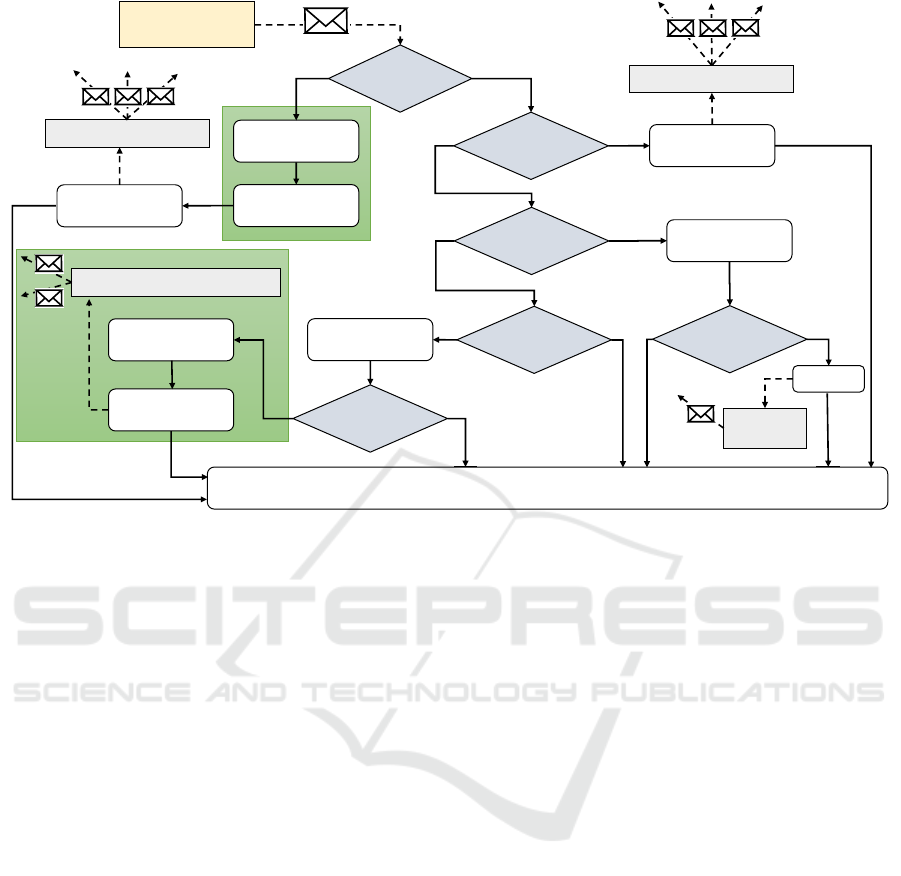
Figure 2: Flow chart for a single agent in privacy COHDA. This process chain is started each time a message arrives in the
in-box of the agent. The green framed part corresponds to the standard COHDA process with just perceive-decide-act phases.
evaluation. Only the elements of x
j
(from the local
feasible region F
a
j
) are mutable for optimization; the
sum of others is locally treated as fixed. In privacy
COHDA, the agent does not know the other sched-
ules. Instead, this summation has to be done jointly
by a secret sharing approach. Let x
j
be the schedule
that is requested from agent a
j
to be summed up with
the other agents’ schedules. Schedules are scaled to
[0,1] (percent of rated power). Each agent splits up
its own schedule. Agent a
j
splits up x
j
into the set
R
a
j
= r
r
r
(1)
a
j
,... ,r
r
r
(n)
a
j
of random pieces of the same di-
mension as the original schedule (stratification):
R
a
j
= {r
r
r
(ℓ)
a
j
|
n
∑
ℓ=1
r
r
r
(ℓ)
a
j
= x
x
x
j
∧ r
r
r
1
a
j
(
ℓ) ∼ N (0, 1)
d
}. (3)
The elements r
r
r
(1)
a
j
,. .. ,r
r
r
(n−1)
a
j
of set R
a
j
are dis-
tributed to the other n − 1 agents; one piece is kept.
This is done by each agent. Then, for each agent
holds: agent a
k
knows r
r
r
(k)
a
1
,. .. ,r
r
r
(k)
a
n
and can calculate
the sum S
k
=
∑
r
r
r
(k)
a
i
that is sent to the requesting agent
(the one that wants to make a new decision). This
agent finally can calculate the sum of all schedules by
summing up the sums of random parts from all agents:
S = S
1
+ ··· + S
n
.
Neither the random pieces of schedules nor the
intermediate sums of random parts from different
agents contain any usable information. Yet, the sum
of all parts eventually yields the desired sum. The ran-
dom partition for schedule stratification can be chosen
differently every time. Actually, it is even not neces-
sary to reveal the identity of a schedule part owner.
As a result, the decision stage was split up into two
parts and the summation process coordination was in-
tegrated by adding three new message types. Figure
2 shows the new overall process of a single agent.
When a standard COHDA message is received, the
standard perceive stage takes place with the only dif-
ference that the message contains only hash codes of
schedules. The actual schedules and are stored pri-
vately at the respective agents.
With the hash codes the summation of schedules
is initiated by sending a split request message to all
agents. This message contains for each agent: (1) the
individual hash code for the receiving agent (the one
that is part of the joint solution), (2) the agent ID of
the requesting agent (the one to which the results have
to be returned), and (3) a process ID for the new sum-
mation process. The process ID is necessary due to
the asynchronous nature of COHDA. While an agent
is waiting for the result, new COHDA messages might
come in from other agents that spawn additional sum-
mation processes.
If an agent receives a split request message, it
looks up the respective schedule using the received
hash code and splits it up into random parts for ev-
ery agent (including itself). After splitting, one dif-
ferent one of the random partial schedules is sent to
Privacy-Preserving Self-Organization in Distributed Energy Scheduling
257
each agent (including itself) together with the pro-
cess ID and the ID of the initiator. Because the agent
includes itself in the summation process, there is at
least on random part that is not revealed even if all
other agents work together against this agent. After
sending, the agent sleeps again until the next message
comes in.
If an agent receives a partial schedule, it stores the
part together with the process ID and waits for other
partial schedules with the same process ID from other
agents to come in. If the agent has received a par-
tial schedule from each agent with the same process
ID, it sums up these parts. From the received partial
schedules as well as from the sum, no information can
be derived. If all parts are received and the (partial)
sum is calculated, the sum is sent back to the initiator
together with the process ID.
If an agent receives a partial sum it stores it and
waits for the other partial sums. A partial sum is the
sum of random parts from each agent and thus does
also contain no information on a specific schedule. If
an agent receives a partial sum it is the initiator of
this summation process. As soon as all partial sums
are received, they are added up to the complete sum
of all schedules of all other agents that belong to a
specific solution candidate. Now, the agent can con-
tinue with the standard COHDA procedure by deter-
mining a schedule for the own controlled energy re-
source based on the sum and the gap to the goal. If
better than the previous solution, it stores the new so-
lution candidate and sends out the hash code for the
new schedule. In Fig. 2 the parts that correspond to
standard COHDA are marked by a green background
(cf. Fig. 1). The rest is an addition to the protocol to
achieve privacy by secret sharing.
4 RESULTS
For our evaluation experiments, we used the follow-
ing scenario: Groups of distributed co-generation
plants (CHP) are supposed to jointly generate a given
energy generation schedule (e. g. given from some
market). Each CHP is controlled by an agent and
all agents together form a coalition and negotiate the
individual operation planning together by using the
COHDA algorithm. As model for the CHP, we used a
well know simulation model that has been used and
evaluated e.g. in (Neugebauer et al., 2015). This
model comprises a micro co-generation plant with
4.7 kW of rated electrical power (12.6 kW thermal
power) and is bundled with a thermal buffer store.
Constraints restrict power band, buffer charging, gra-
dients, min. on and off times, and satisfaction of ther-
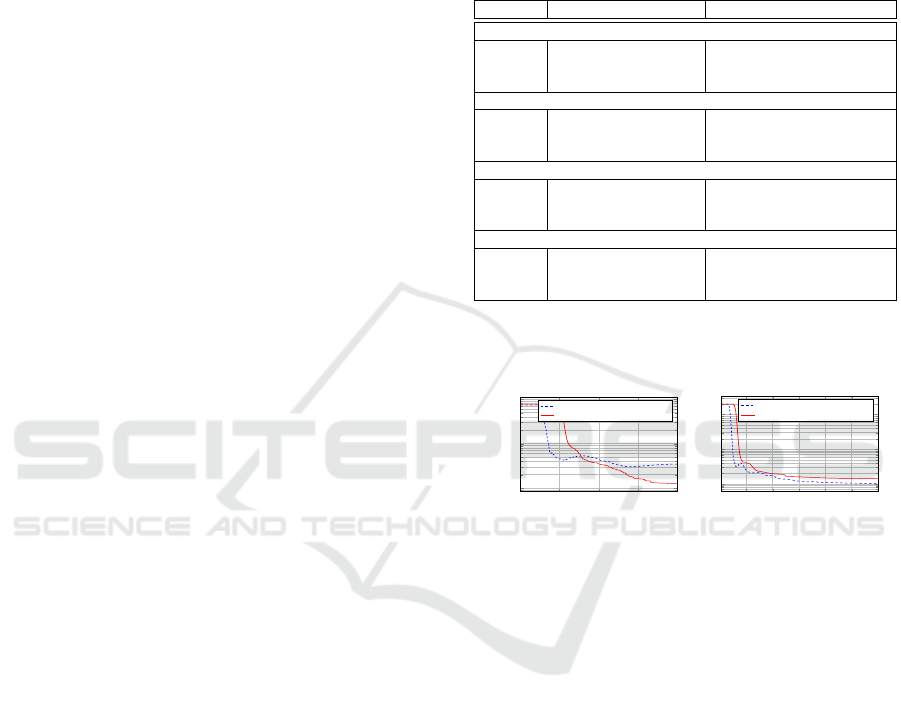
Table 1: Results for four CHP generator examples with
different numbers of agents, different time horizons, and
different problem difficulty averaged over 100 simulation
runs each. We compare the mean number of messages sent
during negotiation, the mean number of decisions that the
agents made to revise previous solution candidates and the
final solution quality measured as symmetric mean absolute
percentage error.
standard COHDA privacy COHDA
50 agents, l = 8
sMAPE 0.46 ± 0.69 3.2 ± 0.81
decisions 4612.1 ± 2490.241 3597.8 ± 301.5
messages 109728 ± 59154.5 6992777.7 ± 501955.3
10 agents, l = 96
sMAPE 0.024 ± 0.095 0.78 ± 0.29
decisions 149.81 ± 45.9 338.43 ± 79.9
messages 620.07 ± 194.307 35971.74 ± 8773.9
100 agents, l = 96
sMAPE 0.12 ± 0.046 0.73 ± 0.39
decisions 13191.9 ± 3861.7 11383.45 ± 4415.5
messages 650751.8 ± 190802.5 93115416.5 ± 40164449.1
10 agents, l = 96, unsolvable
sMAPE 36 ± 1.9 37 ± 1.3
decisions 62.9 ± 7.58 74.55 ± 7.44
messages 259.9 ± 31.1 6906.3 ± 768.6
mal demand. Thermal demand is determined by sim-
ulating losses of a detached house (including hot wa-
ter drawing) according to given weather profiles.
100 200 300 400
10
0
10
1
10
2
time/ ticks
error/ ∥·∥
2
mean current solution
mean best solution
(a)
20 40
60
80 100 120
10
0
10
1
10
2
time/ ticks
error/ ∥·∥
2
mean current solution
mean best solution
(b)
Figure 3: Mean convergence behavior of privacy COHDA
(left) and standard COHDA (right).
First, we looked at the convergence of privacy
COHDA. Convergence of standard COHDA has
been formally proven in (Hinrichs and Sonnenschein,
2017). COHDA converges under the condition that
the global objective evaluation function is monotoni-
cally decreasing and no agent sends a message if no
improvement was made. We use the same evaluation
function as in the standard version. On the other hand,
in privacy COHDA messages can be sent also if no
improvement was made because an agent may parti-
cipate in some joint summation. But, such message
does not trigger any new COHDA action (act phase).
So, the conditions for termination still hold in privacy
COHDA. Nevertheless, we analyzed the convergence
behavior. From 100 optimization runs with 20 agents
each, we collected at each point in time the best so
far seen and the currently scrutinized solution quali-
ties from each agent. To do this in an asynchronously
acting system, we used an observer that queried all
agents at global time ticks. As all of these collected
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
258
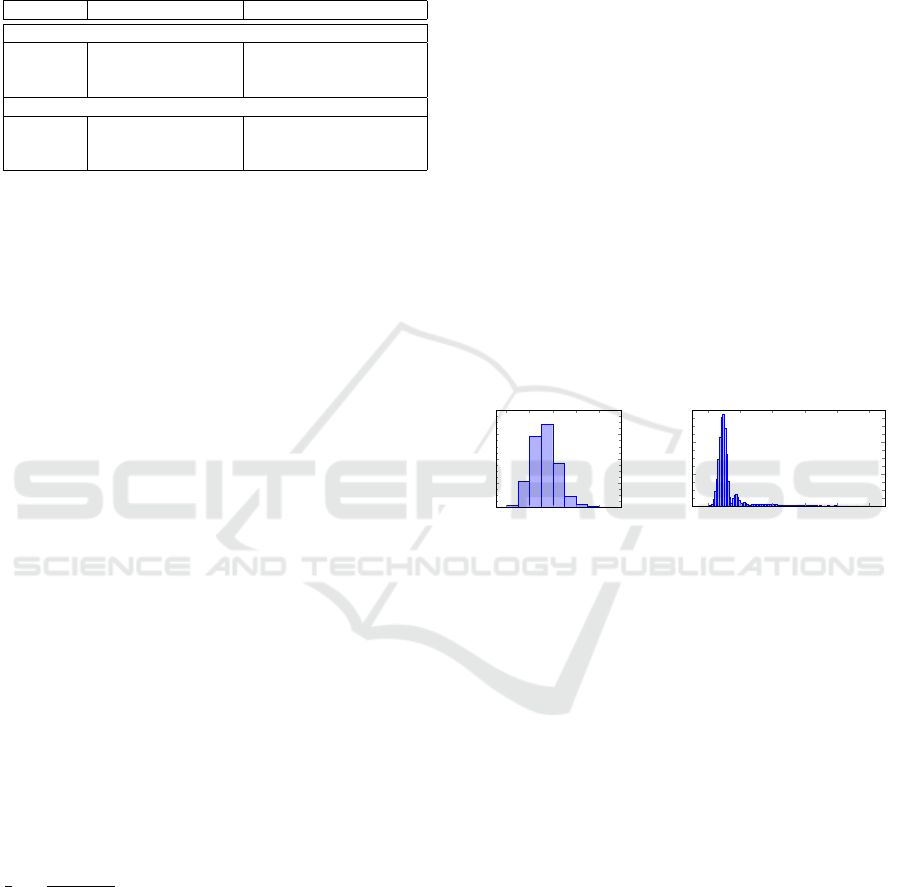
Table 2: Results for a mixed and a pure consumption sce-
nario with 25 agents each. We compare the mean number
of messages sent during negotiation, the mean number of
decisions that the agents made to revise previous solution
candidates and the final solution quality measured as sym-
metric mean absolute percentage error.
standard COHDA privacy COHDA
mixed scenario, 25 agents, l = 96
sMAPE 0.16 ± 0.12 3.7 ± 1.34
decisions 3424.2 ± 1107.52 5259.8 ± 1518.7
messages 41215.1 ± 13310.8 3142462.6 ± 935036.1
25 consumer agents, l = 96
sMAPE 0.36 ± 0.15 2.1 ± 1.45
decisions 2974.1 ± 445.9 4747.5 ± 1508.1
messages 35794.6 ± 5368.8 2557552.1 ± 921311.3
convergence series are of a different length, we aver-
aged the solution qualities for all agents for each time
tick for the first 400 ticks.
A sample result is shown in Figure 3(a). Ob-
viously, a rather good solution appears on average
rather early, but needs some time to propagate to the
other agents. This propagation time is longer than in
standard COHDA due to the fact that the summation
takes some time until a solution candidate from other
agents can be considered. In (Hinrichs and Sonnen-
schein, 2014) it has been demonstrated that a certain
degree of additional disturbance in the system leads to
a better solution quality, because more solution can-
didates are considered in parallel. Such disturbance
is already incorporated in both COHDA version by
random message delays. An additional effect due to
the privacy related messages could not be observed al-
though the decision making delay obviously leads to a
larger exploration compared with standard COHDA.
For comparison: Fig. 3(b) shows the mean conver-
gence of standard COHDA for the same scenario.
Compared with this result, privacy COHDA still ex-
plores larger regions in the end instead of switching
to exploitation. Future work will show whether this is
a potential for improvement.
Table 1 shows some results that compare the
achieved final solution quality of both approaches. In
order to allow comparability of the results of differ-
ently sized scenarios, all qualities are measured as
symmetric mean absolute percentage error sMAPE =
1
n
·
∑
|ζ
i
−x
i
|
0.5·(ζ
i
+x
i
)
. The mean absolute percentage error
allows for comparing scenarios of different size (dif-
ferent number of agents), but in our case the max-
imum negative deviation is due to the nature of the
scenario bounded by zero. Thus, standard MAPE is
biased towards higher values. For this reason, we used
the symmetric version. All results are in percent.
Table 1 shows the results for four different scenar-
ios with different numbers of agents that all control a
CHP and different problem complexities due to differ-
ent schedule lengths. The mean total number of mes-
sages for all scenarios is significantly higher for the
privacy case. This is immediately clear, because three
new message types have been introduced. The mean
total number of decisions that all agents make, stays
more or less in the same magnitude. The result qual-
ity slightly degrades except for the unsolvable sce-
nario. Here, both COHDA versions stagnate with al-
most the same sub-optimal solution quality. For all
other scenarios, the global optimum is known to be
zero. In smaller scenarios, standard COHDA seems
to be advantageous in terms of solution quality. In
more realistically sized larger scenarios with 100 or
more agents, the degradation in solution quality for
privacy COHDA is neglectable. That is because it is
smaller than the inherent uncertainty in such scenar-
ios due to forecast errors; e.g. of the thermal demand
(Bremer and Lehnhoff, 2017c).
Table 2 shows two additional results for a mixed
(generation and consumption) scenario comprizing 10
CHP, 10 heat pumps, 3 batteries, and 2 medium sized
cool storages, as well as a pure consumption scenario
with warm water boilers instead of CHPs.
0 20 40
60
80
0
0.1
0.2
0.3
0.4
(a)
0 200 400
600
800 1,000
0
5 · 10
−2
0.1
0.15
(b)
Figure 4: Mean convergence behavior of privacy COHDA
(left) and standard COHDA (right).
In the last two experiments, we had a deeper look
into the sent messages. obviously, the total number
of messages grows significantly compared with stan-
dard COHDA. For standard COHDA, the main im-
pacts on the number of messages used for negotiation
are based on the used topology, the message delay, the
reaction time of individual agents, and the number of
agents. Research on these impacts can be found in
(Oest et al., 2021; Anders et al., 2012; Hinrichs and
Sonnenschein, 2014). This overall weak quadratic be-
havior is also present in privacy COHDA as we use
the same basic principles. Additionally, we can ob-
serve two effects that are due to introducing privacy.
First, we can observe a change in the distribution
of messages over time. Figure 4(a) shows the distri-
bution of messages over time for standard COHDA.
The number of messages grows for some time and
ceases eventually after a single peak. The distribution
over time for privacy COHDA differs in two charac-
teristics (cf. Fig. 4(b)). First, after the main peak,
the duration until ceasing is way longer. Introduc-
ing a distributed calculation of the sum of schedules
Privacy-Preserving Self-Organization in Distributed Energy Scheduling
259
0
5
10
15
20
25
30
35
40
45 50 55 60 65
70
75
80
0
1
2
3
·10
7
number of SV
messages
Figure 5: Relationship between the number of agents and
the distribution of the amount of messages that are sent dur-
ing negotiation.
obviously results in a way longer phase of propagat-
ing an already found optimal solution to all agents,
what is necessary for termination (Hinrichs and Son-
nenschein, 2017). Secondly, we can observe several
smaller peaks after the first one and thus a damped os-
cillation behavior. The reason for this is so far unclear.
Nevertheless, as COHDA shows an anytime behavior
after some initial warm-up phase (Hinrichs and Son-
nenschein, 2017), the process could be stopped earlier
with still having a feasible (sub-optimal) solution in
case a deadline is approaching. The conditions for the
anytime property still hold for the privacy-preserving
version, so we can stop even earlier – compared to the
total length of the process.
The growth in the number of messages that is in-
duced by the number of agents grow quadratically
(with R
2
≈ 0.9) what can be seen in Fig. 5 for a
CHP example with 5 to 75 agents. This is quite ob-
vious as for each new agent one additional schedule
has to be summed up and this additionally involves
all present agents. On the other hand, the optimiza-
tion problem that is solved with COHDA also has a
profound impact on the number of exchanged mes-
sages. Some example analysis on other use cases
with partly worse growth behavior can be found in
(Volkova et al., 2019; Buhl et al., 2017; Bremer and
Lehnhoff, 2017a; Radtke et al., 2023).
5 CONCLUSION
Multi-agent systems in the smart grid domain in
which individual agents represent the interests of dif-
ferent (private) operators of energy resources in a
distributed coordination approach for joint planning,
must treat private data with care. This data should
only be disclosed sparingly (ideally not at all) in order
to achieve broad acceptance of such mechanisms. We
presented the integration of secret sharing into dis-
tributed, multi-agent based energy scheduling as one
building block for a privacy-preserving smart grid.
With the presented approach, it becomes possible to
achieve an optimal planning of the energy generation
within a group of distributed energy resources in a
distributed way without a need for disclosing infor-
mation on one’s own production schemes. The evalu-
ation results are promising for up to medium sized vir-
tual power plant or energetic neighborhood scenarios.
For larger scenarios, a research path for accelerating
negotiation could be sketched as a hierarchical multi-
part computation of the sums in order to reduce group
size and thus communication traffic. In this way, pre-
dictive scheduling with integrated secret sharing is a
suitable approach for achieving privacy through data
sparsity in an important class of algorithms in the fu-
ture smart grid.
REFERENCES
Agrawal, R., Kiernan, J., Srikant, R., and Xu, Y. (2004).
Order preserving encryption for numeric data. In
Proceedings of the 2004 ACM SIGMOD international
conference on Management of data, pages 563–574.
Al Badawi, A., Veeravalli, B., Mun, C. F., and Aung, K.
M. M. (2018). High-performance fv somewhat homo-
morphic encryption on gpus: An implementation us-
ing cuda. IACR Transactions on Cryptographic Hard-
ware and Embedded Systems, pages 70–95.
Alaya, B., Laouamer, L., and Msilini, N. (2020). Homomor-
phic encryption systems statement: Trends and chal-
lenges. Computer Science Review, 36:100235.
Anders, G., Hinrichs, C., Siefert, F., Behrmann, P., Reif,
W., and Sonnenschein, M. (2012). On the Influence
of Inter-Agent Variation on Multi-Agent Algorithms
Solving a Dynamic Task Allocation Problem under
Uncertainty. In Sixth IEEE International Conference
on Self-Adaptive and Self-Organizing Systems (SASO
2012), pages 29–38, Lyon, France. IEEE Computer
Society. (Best Paper Award).
Beimel, A. (2011). Secret-sharing schemes: A survey. In
International conference on coding and cryptology,
pages 11–46. Springer.
Ben-Or, M., Goldwasser, S., and Wigderson, A. (2019).
Completeness theorems for non-cryptographic fault-
tolerant distributed computation. In Providing sound
foundations for cryptography: on the work of Shafi
Goldwasser and Silvio Micali, pages 351–371.
Bostwick, G. L. (1976). A taxonomy of privacy: Re-
pose, sanctuary, and intimate decision. Calif. L. Rev.,
64:1447.
Bremer, J. and Lehnhoff, S. (2016). A decentralized
PSO with decoder for scheduling distributed electric-
ity generation. In Squillero, G. and Burelli, P., editors,
Applications of Evolutionary Computation: 19th Eu-
ropean Conference EvoApplications (1), volume 9597
of Lecture Notes in Computer Science, pages 427–
442, Porto, Portugal. Springer.
Bremer, J. and Lehnhoff, S. (2017a). An agent-based ap-
proach to decentralized global optimization-adapting
cohda to coordinate descent. In International Confer-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
260

ence on Agents and Artificial Intelligence, volume 2,
pages 129–136. SCITEPRESS.
Bremer, J. and Lehnhoff, S. (2017b). Decentralized sur-
plus distribution estimation with weighted k-majority
voting games. In Highlights of Practical Applications
of Cyber-Physical Multi-Agent Systems: International
Workshops of PAAMS 2017, Porto, Portugal, June 21-
23, 2017, Proceedings 15, pages 327–339. Springer.
Bremer, J. and Lehnhoff, S. (2017c). Enhancing Support
Vector Decoders by Integrating an Uncertainty Model,
pages 114–132. Springer International Publishing,
Cham.
Bremer, J. and Lehnhoff, S. (2020a). Controlled self-
organization for steering local multi-objective opti-
mization in virtual power plants. In Highlights in
Practical Applications of Agents, Multi-Agent Sys-
tems, and Trust-worthiness. The PAAMS Collection:
International Workshops of PAAMS 2020, L’Aquila,
Italy, October 7–9, 2020, Proceedings 18, pages 314–
325. Springer.
Bremer, J. and Lehnhoff, S. (2020b). Encrypted decentral-
ized optimization for data masking in energy schedul-
ing. In Proceedings of the 3rd International Confer-
ence on Big Data Research, ICBDR ’19, pages 103–
109, New York, NY, USA. Association for Computing
Machinery.
Bremer, J. and Lehnhoff, S. (2022). Information disclosure
in vpp-information disclosure by decentralized coor-
dination in virtual power plants and district energy
systems.
Bremer, J. and Sonnenschein, M. (2013). Constraint-
handling for optimization with support vector surro-
gate models - a novel decoder approach. In Inter-
national Conference on Agents and Artificial Intelli-
gence, volume 2, pages 91–100. SciTePress.
Buhl, H., Dombrowski, T., Hogen, E., Kreutz, M., Palm, D.,
Stark, S., Stubbe, P., Warsch, S., Bremer, J., Lehnhoff,
S., et al. (2017). Ein algorithmus f
¨
ur den wiederaufbau
eines smart grid nach einem blackout.
Catalano, D., Cramer, R., Di Crescenzo, G., Darmg
˚
ard, I.,
Pointcheval, D., Takagi, T., Cramer, R., and Damg
˚
ard,
I. (2005). Multiparty computation, an introduction.
Contemporary cryptology, pages 41–87.
Chandramohan, D., Sathian, D., Rajaguru, D., Vengattara-
man, T., and Dhavachelvan, P. (2015). A multi-agent
approach: To preserve user information privacy for a
pervasive and ubiquitous environment. Egyptian In-
formatics Journal, 16(1):151–166.
Chaum, D., Cr
´
epeau, C., and Damgard, I. (1988). Multi-
party unconditionally secure protocols. In Proceed-
ings of the twentieth annual ACM symposium on The-
ory of computing, pages 11–19.
Dabrock, K. (2018). Privacy in der automatisierten
pr
¨
adiktiven Einsatzplanung von Energieanlagen im
Smart Grid. Master’s thesis, University of Oldenburg,
Dept. of Energy Informatics, Germany.
Dawson, E. and Donovan, D. (1994). The breadth of
shamir’s secret-sharing scheme. Computers & Secu-
rity, 13(1):69–78.
Desmedt, Y. and Frankel, Y. (1991). Shared generation of
authenticators and signatures. In Annual International
Cryptology Conference, pages 457–469. Springer.
Finster, S. and Baumgart, I. (2015). Privacy-aware smart
metering: A survey. IEEE communications surveys &
tutorials, 17(2):1088–1101.
Fiore, D. and Russo, G. (2019). Resilient consensus for
multi-agent systems subject to differential privacy re-
quirements. Automatica, 106:18–26.
Gentry, C. (2009). A fully homomorphic encryption scheme.
Stanford university.
Gordon, S. D. and Katz, J. (2006). Rational secret shar-
ing, revisited. In Security and Cryptography for
Networks: 5th International Conference, SCN 2006,
Maiori, Italy, September 6-8, 2006. Proceedings 5,
pages 229–241. Springer.
Guo, Y., Cao, Z.-F., and Dong, X.-L. (2022). Generalized
goldwasser and micali’s type cryptosystem. Journal
of Computer Science and Technology, 37(2):459–467.
Han, W. and Xiao, Y. (2016). Privacy preservation for v2g
networks in smart grid: A survey. Computer Commu-
nications, 91:17–28.
Hinrichs, C. and Sonnenschein, M. (2014). The Effects
of Variation on Solving a Combinatorial Optimiza-
tion Problem in Collaborative Multi-Agent Systems.
In Mueller, J. P., Weyrich, M., and Bazzan, A. L., edi-
tors, Multiagent System Technologies, volume 8732 of
Lecture Notes in Computer Science, pages 170–187.
Springer International Publishing.
Hinrichs, C. and Sonnenschein, M. (2017). A distributed
combinatorial optimisation heuristic for the schedul-
ing of energy resources represented by self-interested
agents. International Journal of Bio-Inspired Compu-
tation, 10(2):69–78.
Hinrichs, C., Sonnenschein, M., and Lehnhoff, S. (2013).
Evaluation of a Self-Organizing Heuristic for Inter-
dependent Distributed Search Spaces. In Filipe, J.
and Fred, A. L. N., editors, International Conference
on Agents and Artificial Intelligence (ICAART 2013),
volume Volume 1 – Agents, pages 25–34. SciTePress.
Huo, X. and Liu, M. (2021). Privacy-preserving distributed
multi-agent cooperative optimization – paradigm de-
sign and privacy analysis. IEEE Control Systems Let-
ters, 6:824–829.
Kang, J. (1997). Information privacy in cyberspace transac-
tions. Stan. L. Rev., 50:1193.
Kumar, P., Lin, Y., Bai, G., Paverd, A., Dong, J. S., and
Martin, A. (2019). Smart grid metering networks:
A survey on security, privacy and open research is-
sues. IEEE Communications Surveys & Tutorials,
21(3):2886–2927.
Marcolla, C., Sucasas, V., Manzano, M., Bassoli, R., Fitzek,
F. H., and Aaraj, N. (2022). Survey on fully homomor-
phic encryption, theory, and applications. Proceedings
of the IEEE, 110(10):1572–1609.
Meftah, S., Tan, B. H. M., Aung, K. M. M., Yuxiao, L., Jie,
L., and Veeravalli, B. (2022). Towards high perfor-
mance homomorphic encryption for inference tasks
on cpu: An mpi approach. Future Generation Com-
puter Systems, 134:13–21.
Privacy-Preserving Self-Organization in Distributed Energy Scheduling
261

Mikhail, M., Abouelseoud, Y., and Elkobrosy, G. (2014).
Extension and application of el-gamal encryption
scheme. In 2014 World Congress on Computer Ap-
plications and Information Systems (WCCAIS), pages
1–6. IEEE.
Moore, C., O’Neill, M., O’Sullivan, E., Dor
¨
oz, Y., and
Sunar, B. (2014). Practical homomorphic encryption:
A survey. In 2014 IEEE International Symposium
on Circuits and Systems (ISCAS), pages 2792–2795.
IEEE.
Naor, M. and Wool, A. (1996). Access control and signa-
tures via quorum secret sharing. In Proceedings of the
3rd ACM Conference on Computer and Communica-
tions Security, pages 157–168.
Narayanan, A., Pournaras, E., and Nardelli, P. H. (2024).
Large-scale package deliveries with unmanned aerial
vehicles using collective learning. IEEE Intelligent
Systems.
Naval, N. and Yusta, J. M. (2021). Virtual power plant mod-
els and electricity markets-a review. Renewable and
Sustainable Energy Reviews, 149:111393.
Neugebauer, J., Kramer, O., and Sonnenschein, M. (2015).
Classification cascades of overlapping feature ensem-
bles for energy time series data. In Proceedings of
the 3rd International Workshop on Data Analytics for
Renewable Energy Integration (DARE’15). Springer.
Oest, F., Radtke, M., Blank-Babazadeh, M., Holly, S., and
Lehnhoff, S. (2021). Evaluation of communication
infrastructures for distributed optimization of virtual
power plant schedules. Energies, 14(5):1226.
Peng, K., Aditya, R., Boyd, C., Dawson, E., and Lee, B.
(2004). Multiplicative homomorphic e-voting. In In-
ternational Conference on Cryptology in India, pages
61–72. Springer.
Poli, R. (1996). Parallel distributed genetic programming.
Citeseer.
Potter, M. A. and Jong, K. A. D. (2000). Cooperative coevo-
lution: An architecture for evolving coadapted sub-
components. Evolutionary computation, 8(1):1–29.
Rabin, M. O. (1983). Randomized byzantine generals. In
24th annual symposium on foundations of computer
science (sfcs 1983), pages 403–409. IEEE.
Radtke, M., Stucke, C., Trauernicht, M., Montag, C., Oest,
F., Frost, E., Bremer, J., and Lehnhoff, S. (2023). Inte-
grating agent-based control for normal operation in in-
terconnected power and communication systems sim-
ulation. In 2023 IEEE Symposium Series on Compu-
tational Intelligence (SSCI), pages 228–233. IEEE.
Ramchurn, S. D., Huynh, D., and Jennings, N. R. (2004).
Trust in multi-agent systems. The knowledge engi-
neering review, 19(1):1–25.
Ramchurn, S. D., Vytelingum, P., Rogers, A., and Jennings,
N. R. (2012). Putting the’smarts’ into the smart grid:
a grand challenge for artificial intelligence. Commu-
nications of the ACM, 55(4):86–97.
Rapp, B. and Bremer, J. (2023). Masking sensitive data
in self-organized smart region orchestration. In Pro-
ceedings of the 2023 8th International Conference on
Information and Education Innovations, ICIEI ’23,
pages 235–240, New York, NY, USA. Association for
Computing Machinery.
Reis, D., Takeshita, J., Jung, T., Niemier, M., and Hu,
X. S. (2020). Computing-in-memory for performance
and energy-efficient homomorphic encryption. IEEE
Transactions on Very Large Scale Integration (VLSI)
Systems, 28(11):2300–2313.
Rivest, R. L., Adleman, L., Dertouzos, M. L., et al. (1978).
On data banks and privacy homomorphisms. Founda-
tions of secure computation, 4(11):169–180.
Rothblum, R. (2011). Homomorphic encryption: From
private-key to public-key. In Theory of cryptography
conference, pages 219–234. Springer.
Schermer, B. W. (2007). Software agents, surveillance, and
the right to privacy: a legislative framework for agent-
enabled surveillance. Leiden University Press.
Schoeman, F. D. (1984). Philosophical dimensions of pri-
vacy: An anthology. Cambridge University Press.
Solove, D. J. (2005). A taxonomy of privacy. U. Pa. l. Rev.,
154:477.
Spiekermann, S. and Cranor, L. (2009). Engineering pri-
vacy. Software Engineering, IEEE Transactions on,
35:67–82.
Stark, S., Frost, E., and Nebel-Wenner, M. (2024).
Distributed multi-objective optimization in cyber-
physical energy systems. ACM SIGENERGY Energy
Informatics Review, 4(2):7–18.
Stark, S., Volkova, A., Lehnhoff, S., and de Meer, H.
(2021). Why your power system restoration does not
work and what the ict system can do about it. In Pro-
ceedings of the twelfth ACM international conference
on future energy systems, pages 269–273.
Such, J. M., Espinosa, A., and Garc
´
ıa-Fornes, A. (2014). A
survey of privacy in multi-agent systems. The Knowl-
edge Engineering Review, 29(3):314–344.
Talbi, E. (2009). Metaheuristics: From Design to Imple-
mentation. Wiley Series on Parallel and Distributed
Computing. Wiley.
Tassa, T. (2011). Generalized oblivious transfer by secret
sharing. Designs, Codes and Cryptography, 58:11–
21.
Volkova, A., Stark, S., de Meer, H., Lehnhoff, S., and Bre-
mer, J. (2019). Towards a blackout-resilient smart grid
architecture. In International ETG-Congress 2019;
ETG Symposium, pages 1–6.
Wang, Y., Lu, J., Zheng, W. X., and Shi, K. (2021).
Privacy-preserving consensus for multi-agent systems
via node decomposition strategy. IEEE Transac-
tions on Circuits and Systems I: Regular Papers,
68(8):3474–3484.
Watts, D. and Strogatz, S. (1998). Collective dynamics of
’small-world’ networks. Nature, (393):440–442.
Wehkamp, S., Schmeling, L., Vorspel, L., Roelcke, F., and
Windmeier, K.-L. (2020). District energy systems:
Challenges and new tools for planning and evaluation.
Energies, 13(11):2967.
Wu, H.-T., Cheung, Y.-m., and Huang, J. (2016). Reversible
data hiding in paillier cryptosystem. Journal of Visual
Communication and Image Representation, 40:765–
771.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
262
