
Optimizing Elevator Performance
with SARL Multi-Agent Systems: A Distributed Approach
for Enhanced Responsiveness and Efficiency
Vy Le, Oliver Harold Joegensen, Tin Nguyen, Khang Nguyen Hoang and Ginel Dorleon
a
School of Science, Engineering and Information Technology, RMIT University, Ho Chi Minh City, Vietnam
Keywords:
MAS, Optimization, Distributed System, Centralized System.
Abstract:
Elevators play a pivotal role in modern urban living, boosting productivity and convenience efficiently. In
elevator systems, the optimization of Multi-Agent Systems (MAS) is indispensable as it enhances agent co-
ordination, adaptability, delay reduction, client satisfaction, and resource use. In this paper, we introduce an
algorithm based on SARL MAS designed to enhance elevator controller performance. Our approach compares
Centralized and Distributed Agent Systems, demonstrating the superiority of Distributed Agent Systems due
to their improved responsiveness, efficiency, and adaptability. Our findings provide valuable insight into the
use of SARL MAS not only for elevator control but also for other applications such as queue management
systems and resource allocation in computing, highlighting the benefits of a distributed approach.
1 INTRODUCTION
More than just a mechanical invention, the eleva-
tor is a transformative innovation that transformed
our modern infrastructure. It reshaped how we think
about and construct multi-story structures, forever al-
tering the landscape of cities. The early elevator dis-
patch systems were rudimentary, relying on a sim-
ple button-up /-down system that randomly assigned
elevators to passengers (Al-Kodmany, 2023). Sub-
sequent advances in dispatch algorithms have tran-
scended these basic methods, resulting in notable re-
ductions in waiting times, travel distances, and energy
consumption (Pepyne and Cassandras, 1998).
This study seeks to revolutionize the application
of multi agent systems (MAS) in elevator opera-
tions, addressing inherent challenges and offering so-
lutions that promise increased efficiency, time sav-
ings, and reduced energy usage. Focusing specifi-
cally on apartment buildings, our research aims to de-
sign an elevator algorithm using SARL (Rodriguez
et al., 2014). The choice of SARL stems from its
alignment with the simulator and its compatibility
with Aspect-Oriented Programming (AOP), partic-
ularly suited for addressing complex AI problems.
Furthermore, SARL incorporates holonic multi-agent
systems (HMAS) (Giret et al., 2005), proven effec-
a
https://orcid.org/0000-0003-2343-4445
tive in modeling traffic networks, implementing self-
learning mechanisms for energy-predictive planning,
and coordinating distributed sensors. Unlike real-life
elevators, our system encompasses two distinct calls:
the elevator call, where passengers press Up () or
Down () to enter the car, and the car call, where pas-
sengers within the car select their desired floors. The
system comprises multiple elevators, forming a cohe-
sive Multi-Agent System (MAS).
In this paper, we undertake the design, develop-
ment, and evaluation of two elevator controllers, each
with a unique approach. The first is a centralized con-
troller, responsible for allocating cars for the entire
system, while the second is a distributed controller,
providing each elevator with a separate and indepen-
dent control mechanism. Multiple elevator cars share
identical behaviors within the system. Several as-
sumptions guide our study:
• Each car must complete its assignment before
moving on to the next one, excluding reversals or
skipping floors where passengers intend to exit.
• An empty car possesses the flexibility to execute
any available option (stop, go up, or go down).
• The nearest floor is defined as the one that the car
would reach first in its current direction. When the
elevator is stationary, the current floor substitutes
for the nearest floor.
158
Le, V., Joegensen, O. H., Nguyen, T., Hoang, K. N. and Dorleon, G.
Optimizing Elevator Performance with SARL Multi-Agent Systems: A Distributed Approach for Enhanced Responsiveness and Efficiency.
DOI: 10.5220/0013098400003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 3, pages 158-165
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
• Cars maintain a constant speed, ensuring entirely
predictable travel times between any two floors
based on the floor distance.
• Each car has a weight capacity of 800kg, with in-
capacity leading to a restriction on serving more
customers. If an elevator cannot accommodate all
passengers within a hall call, remaining passen-
gers initiate a new hall call. When an elevator is
in motion and reaches its maximum capacity, it
cannot stop to answer a hall call.
Our contributions in this paper can be summarized as
follows:
1. We introduce a novel algorithm founded on an es-
timated time of dispatch, providing precise guid-
ance to every elevator within the Multi-Agent
System (MAS). This algorithm optimizes the
decision-making process, improving overall ele-
vator performance.
2. We successfully developed two distinct types of
elevator system controllers, both leveraging the
proposed algorithm. Through comprehensive
testing, these controllers showcase the algorithm’s
efficacy in improving the efficiency and respon-
siveness of elevators, thereby contributing to the
advancement of elevator control systems.
3. Using the proposed algorithm, we demonstrate a
significant improvement in the efficiency of the
distributed system controller. This optimization
aspect not only enhances elevator responsiveness
but also maximizes resource utilization, contribut-
ing to a more sustainable and effective operation
of the distributed elevator system.
The rest of this paper follows this structure: in Sec-
tion 2, we summarize the different existing methods
that address elevator controllers optimization. In Sec-
tion 3, we introduce our approach, define our agents
with their skills and the different controllers that will
be using in the experiment. Experimental results are
described and analyzed in Section 4 Chapter. Conclu-
sion and perspectives are presented in Section 5.
2 RELATED WORK
To establish a solid foundation for our understanding
of elevator dispatch systems, we have delved into ex-
isting literature. Our focus in this study centers on
passengers’ requests (P
n
) and Estimated Time to Dis-
patch (ETD) estimation. We are particularly intrigued
by these aspects due to their pivotal role in optimizing
elevator performance and enhancing user experience.
This exploration serves as a strategic basis for our de-
velopment of a more robust algorithm that addresses
the core challenges within elevator control systems.
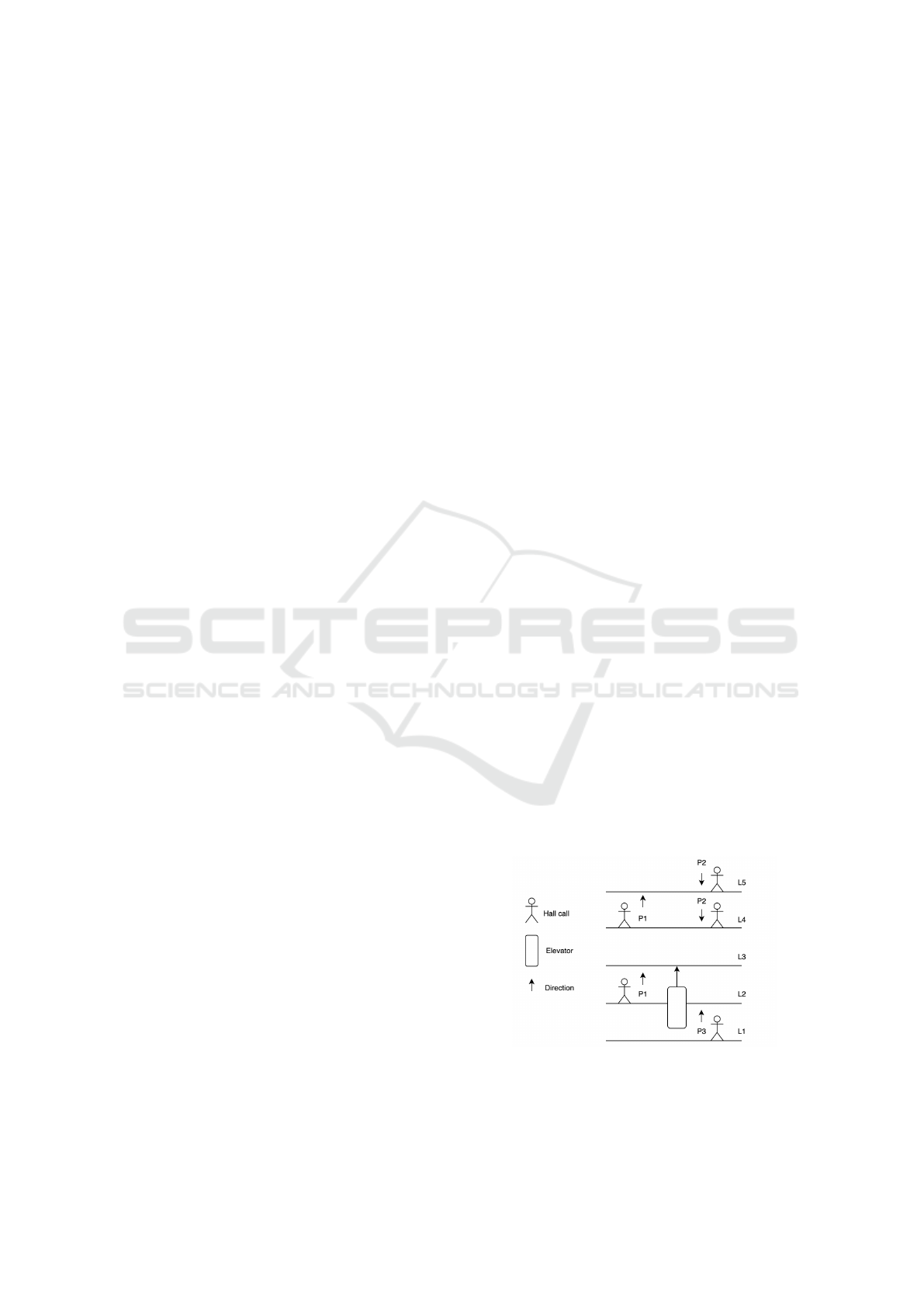
2.1 The Three-Passenger Approach
In the field of elevator control, the Three-Passenger
Approach, as introduced by Rong, Hakonen, and
Lahdelma in their elevator group control algorithm
(Rong et al., 2003), offers a refined strategy for cat-
egorizing passengers, aiming to optimize system effi-
ciency with scientific precision. This innovative ap-
proach meticulously classifies passengers into three
distinct categories: Passenger one (P1) requests, effi-
ciently served in the current travel direction of the ele-
vator; passenger two (P2) requests, requiring a single
direction reversal; and passenger three (P3) requests,
necessitating two reversals.
Scientifically, these categorizations are pivotal in
the assignment of passenger requests to elevators, di-
rectly impacting the overall system performance. By
strategically considering the travel characteristics as-
sociated with each passenger type, this approach min-
imizes unnecessary direction changes, reduces energy
consumption and optimizes the operational efficiency
of the elevator system.
The Three-Passenger Approach, grounded in em-
pirical research and theoretical modeling (Rong et al.,
2003), underscores its scientific relevance by provid-
ing a systematic framework to handle diverse passen-
ger scenarios. Its application in elevator control sys-
tems aligns with the broader goal of advancing effi-
ciency and sustainability in urban transportation in-
frastructures. In conclusion, the Three-Passenger Ap-
proach represents a scientifically informed strategy,
contributing significantly to the optimization of ele-
vator systems and paving the way for more sophis-
ticated control algorithms in the field.The concept is
described in Figure 1 below:
Figure 1: The three-passenger concept.
Optimizing Elevator Performance with SARL Multi-Agent Systems: A Distributed Approach for Enhanced Responsiveness and Efficiency
159

2.2 Estimated Time of Dispatch (ETD)
Estimated Time to Dispatch (ETD) emerges as a piv-
otal metric in the domain of destination-based eleva-
tor dispatching algorithms (Mu
˜
noz et al., 2006; Rong
et al., 2003; Sorsa et al., 2009). This metric is strategi-
cally designed to minimize the collective travel time
of passengers, encompassing both waiting time and
travel time in the car. By optimizing this temporal
aspect, the system aims to elevate passenger service
quality and increase the overall handling capacity of
the elevator system (Latif et al., 2016)
In its nuanced approach, the ETD system dynam-
ically allocates elevator cars based not only on the
proximity of calls but also on the occupancy status
of the elevator car. This dual consideration results in
a more sophisticated and responsive dispatching strat-
egy, enhancing the user experience by minimizing un-
necessary stops (Fujino et al., 1997; Sorsa et al., 2009;
Tanaka et al., 2016). Scientifically, the incorporation
of ETD has been shown to yield tangible benefits,
with studies indicating a remarkable 25% reduction
in overall trip times coupled with a substantial 30%
increase in elevator capacity (Smith, 2002).
Furthermore, the efficiency gains attributed to
ETD underscore its scientific significance, making it
a valuable tool in modern elevator control systems. In
conclusion, ETD stands as a scientifically substanti-
ated approach that not only optimizes elevator system
performance but also significantly enhances the user
experience through its nuanced and adaptive dispatch-
ing algorithm.
3 OUR PROPOSED APPROACH
We introduce our approach by addressing the funda-
mental question: What constitutes a proficient eleva-
tor controller? In pursuit of this query, we meticu-
lously consider several key aspects that collectively
contribute to the overarching goal of designing a more
intelligent elevator system. These crucial properties,
which include responsiveness, efficiency, fairness, ac-
cessibility, and adaptability, are essential to improve
the performance of the system and its ability to adapt
to evolving user demands.
To tackle the imperative of responsiveness, the
controller must swiftly incorporate user signals into
the query queue for prompt processing, leveraging Es-
timated Time to Dispatch (ETD) techniques to effec-
tively group users based on their chosen floors. This
strategic approach not only reduces user waiting times
but also ensures the smooth operation of the eleva-
tor infrastructure. Efficiency, a critical criterion, in-
volves minimizing the total travel distance covered by
the elevator. This is achieved by thoughtfully order-
ing the sequence in which floors are visited, thereby
mitigating unnecessary travel. The controller must
also guard against bunching, optimizing the elevator’s
movement for optimal efficiency.
Fairness in elevator operations mandates univer-
sal access to every floor and equal waiting times be-
tween floors. The controller discourages prioritizing
idle elevators on a specific floor, ensuring equitable
service distribution. Additionally, integrating acces-
sibility features, such as audio and visual cues, caters
to passengers with diverse needs. Lastly, the adapt-
ability of the elevator controller describes its capacity
to adjust based on factors like capacity considerations,
skipping floors when at full capacity, and seamlessly
adapting to elevators out of service while upholding
the aforementioned properties.
To enhance adaptability further, predictive analyt-
ics can be employed, leveraging historical data to pre-
dict peak usage times and adjusting elevator alloca-
tion accordingly. Proactive measures, like anticipat-
ing high-demand periods and allocating additional re-
sources during those times, contribute to minimizing
waiting times. In essence, a comprehensive elevator
controller must balance these multifaceted considera-
tions to optimize its performance, ensuring a respon-
sive, efficient, fair, accessible, and adaptable system
that meets the diverse needs of its users.
3.1 Defined Agents in the MAS
In order to setup our comparative study, we have de-
fined in Table 1 below the list of agents that we use
and are part of our MAS. For better presentation, we
shorten ElevatorSimPercept
1
into ESP.
3.2 The Rule-Based Approach
From the background of three passengers concepts
and ETD, the overall strategy of our design is to have
the shortest ETD serve to passengers. This will form
the decision-making process of the agents. To achieve
this, we follow the rule-based approach. Our rule, in
short, involves checking if a new hall call (i) is a du-
plicate call to an unassigned request, (ii) has already
been assigned to an elevator. Subsequently, the sys-
tem calculates the ETD for the unfilled cars and as-
signs the most suitable car for the call, in order to
achieve the lowest possible ETD. This rule-based ap-
proach offers us some uniqueness in comparison with
other planning mechanisms (Sakita, 2001). For ex-
ample, it fastens the overall decision making process
1
ESP: ElevatorSimPercept
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
160

by removing unqualified situations as soon as possible
before doing any computations. In addition, the rule-
based approach enables real-time responsiveness, al-
lowing the system to quickly adapt to changing envi-
ronments and make decisions efficiently.
3.3 Estimation & Allocation Approach
Due to the limitation of the simulation environment
used for evaluation, we defined our own ETD metric,
inspired by a thorough literature review (Rong et al.,
2003). We define ETD of car i with an existing plan
P through the following formula:
t
total
i
=
∑
j∈P
′
t
stop-time
i, j
+t
reach
i
(1)
Where P
′
is the stops planned by the elevator between
the current floor and the destination floor, taking into
account P1, P2, and P3 calls, t
stop-time
i, j
and t
reach
i
are
constants that are specific for elevator i and floor j.
The ETD calculation is the main logic for our sys-
tem’s elevator allocation approach. When given a
new request (tentative request), the system will de-
cide which elevator to serve that new request through
these ETD estimations. This strategy is applied in
both Central and Distributed Controllers. To allocate
a tentative request to an elevator, we estimate the ETD
for each car, given its existing plan, and greedily as-
sign it. We present below the pseudo-code of our al-
gorithm:
Data: List i; Request R; ElevatorState C
Result: Total estimated time of destination
(ETD)
destination ← estimateDestination(R,
C);
P.add(destination);
P.sortByExecution(C);
▷ Sorts P in P
1
, P
2
, P
3
totalTime ← 0;
for i ∈ P.length do
totalTime ← totalTime+
travelTime(P[i], P[i + 1]);
totalTime ← totalTime+
waitingTime(P[i]);
if P[i] is external then
P.add(estimateDestination(P[i],C));
end
if P[i] == destination then
Return(totalTime);
end
end
Algorithm 1: ETD Calculation Algorithm.
To explain it further, when it comes to assigning el-
evators, the first crucial step is to evaluate the eleva-
tor’s capacity in order to avoid overcrowding. Next,
Table 1: Agent, skills and description.
Agent Skills Description
Orchestrator perceive():SystemState
reason(SystemState):
List(Action)
actuate(List(Action)):
void
The Orchestrator acts as a con-
ductor, focusing on intra-agent
communication and orchestra-
tion. It has three actions:
‘perceive’ retrieves the system
state,‘reason’ signals the Re-
source Allocator to plan,‘actuate’
signals the Safety Override Logic
to validate, and then dispatch the
elevators.
Resource
Allocator
plan(SystemState):
List(Action)
checkCapacity
(SystemState):
List(bool)
estimateTimeTo
Dispatch
(SystemState):
List(int)
The Ressource Allocator acts as a
planner for the system. It:‘plan’
is the main skill which de-
rivies a plan, ‘checkCapacity’
evaluates whether the elevators
are over capacity, ‘estimateTime-
ToDispatch’ gets the ETD for
each elevator.
Observer normalizeEvent(ESP):
ESP
addSensorInformation
(ESP):ESP
stateUpdate
Trigger(ESP): void
fires StateUpdate
The Observer is responsible for
intrepreting the percepts retrieved
from the simulator, and then
add potential additional informa-
tion. It has three action, ‘normal-
izeEvent’ is reponsible for nor-
malizing the percepts retrieved.
‘addSensorInformation’ is repon-
sible for adding senory informa-
tion, like weight of the passen-
gers. ‘stateUpdateTrigger’ sig-
nals the SystemStateAgent to up-
date its internal state.
Safety
Override
Logic
getEmergencyPlan():
List(Action)
validate(List(
ElevatorState),
List(Action)): void
fires DispatchEle-
vator
listenForFire():
void fires Dis-
patchElevator
Safety Override Logic is respon-
sible for any unexpected be-
haviour during execution regard-
ing the fire and emergency plan.
The ‘getEmergencyPlan’ is to de-
fine the list of ‘elevator’s actions’
to adapt the emergency situation.
‘validate’ action is for checking at
anytime the building is in emer-
gency. ‘listenForFire’ is to keep
checking if there is any fire within
the system.
SystemState
Agent
queryState():
SystemState
updateState(ESP):
void fires State-
Change
triggerReplan():
void fires State-
Change
The SystemStateAgent is respon-
sible for saving and updating the
current state of our system. The
‘queryState’ is to return the cur-
rent SystemState, ‘updateState’
fires StateChange to update the
current SystemState, and ‘trigger-
Replan’ is called when replan-
ning is necessary after the updat-
ing.
Optimizing Elevator Performance with SARL Multi-Agent Systems: A Distributed Approach for Enhanced Responsiveness and Efficiency
161
it adds a request to the existing queue of tasks for
the elevator. Consequently, these actions are arranged
based on the ‘three-passenger principle’ to maximize
efficiency. After that, the system determines the ex-
pected destination by computing the middle floor be-
tween the call and the top end of the same direc-
tion, to have the floor that may potentially be chosen.
Next, the agent goes through an iterative procedure,
in which the system repeatedly goes through the list
of actions until it arrives at the estimated floor that
matches the provisional request. Through each itera-
tion, the ETD is determined by accumulating the total
travel and stopping times for the elevator. This me-
thodical methodology guarantees the efficient and ef-
fective administration of elevator operations.
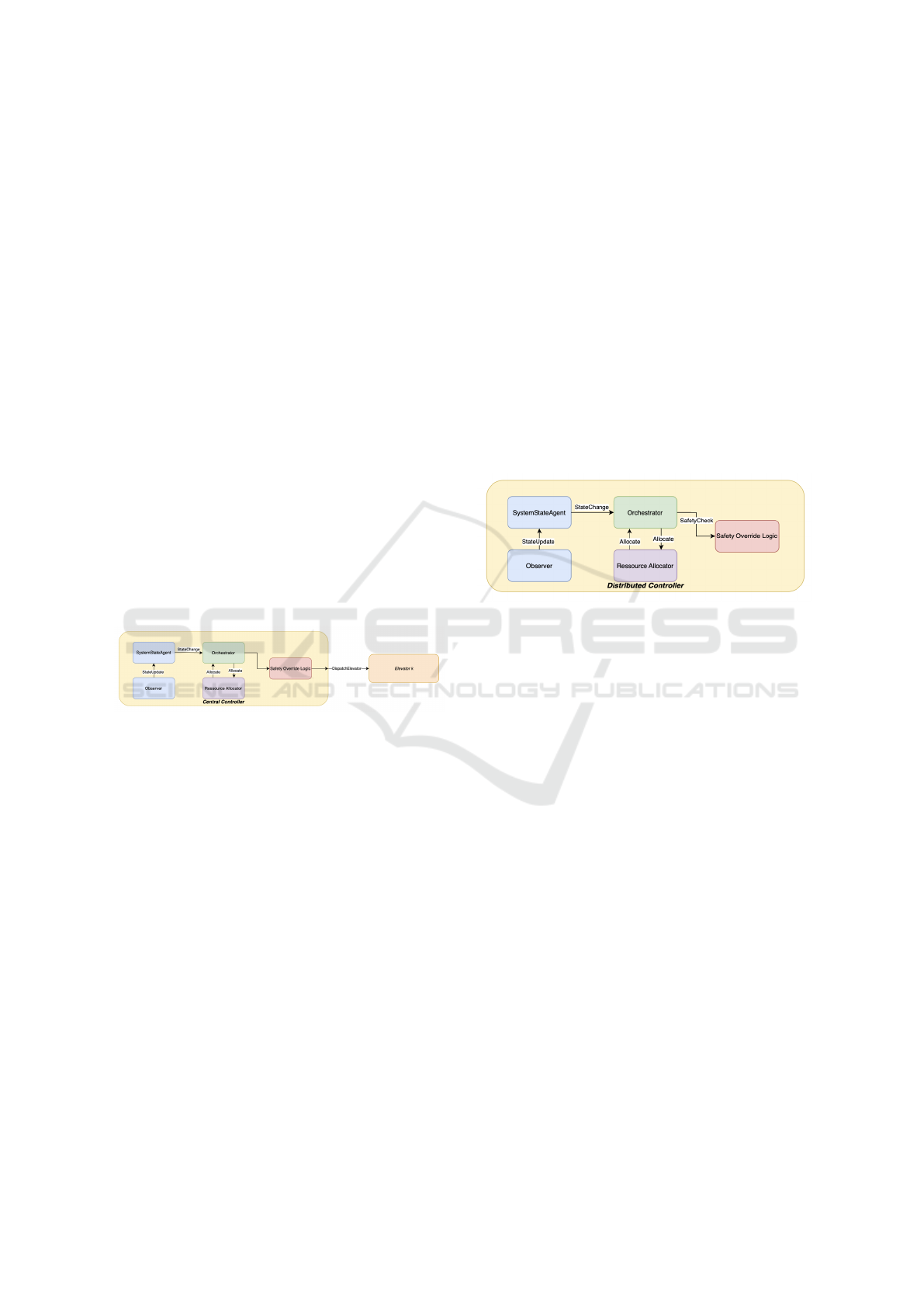
3.4 The Centralized-Agent (CA) Smart
Controller
Together with the proposed above method, we create
a holonic agent to logically separate internal responsi-
bilities associated with controlling an elevator system.
This assures clear distinction between our proposed
method and the remaining associated tasks (such as
request management, state management, etc.). Its
structure is defined in Figure 2 below.
Figure 2: Centralized Controller Architecture.
First, the SystemStateAgent one of the critical
agents that it receives from the environment through
Oberserver agent and updates the states. The Sys-
temStateAgent keeps track of the environment state
(number of elevators, number of floors) and state of
each elevator. Orchestrator gets the SystemState from
SystemStateAgent, given that a request was created.
It then collaborates with Resource Allocator to do the
ETD calculations and allocates a car to the request.
Note that, in a centralized agent controller, all the
ETD calculation and distribution tasks will be done
only in Resource Allocator. It is finally passed to the
SafetyOverride logic, which serves to block elevator
actions in case of emergencies.
3.5 The Distributed Smart Controller
Beside a central controller, we also define a dis-
tributed controller. Our distributed elevator control
system will be structured similarly to the central el-
evator controller. The biggest difference is that each
elevator has its own dedicated controller. Orchestrator
and SafetyOverride agents will keep the same design
as before for reusability purposes, while Observer,
SystemStateAgent and ResourceAllocator agents will
be modified to accommodate for the needs of com-
munication between distributed controllers. This dis-
tributed design has the advantage of being indepen-
dent of the other elevators, e.g. should one elevator
fail and shut down, the others will function as nor-
mally.
Additionally, the system scales horizontally,
meaning possible expansions to the elevator system
require no downtime, as the elevator can simply be
added as an agent. This introduces a level of robust-
ness and adaptability to the entire system, which are
both desirable qualities. Structure of the Distributed
Controller Architecture is presented below in Figure
3 below:
Figure 3: Distributed Controller Architecture.
As a consequence, each elevator is only respon-
sible for calculating its own ETD. To facilitate com-
munication between controllers we define a custom
space, the NegotiationSpace. The NegotiationSpace
inherits from SARL’s OpenEventSpace, and it facili-
tates three tasks:
• Negotiation between agents for elevator alloca-
tions based on lowest ETD estimate
• Sharing if a request has already been assigned
• Sharing when a request has been completed
All these tasks are synchronized using mutual exclu-
sion locks and Java’s CyclicBarrier to ensure correct
decision making. This system scales well and reuses
existing internal agents.
However, it’s limited by the slowest controller due
to synchronization. The impact of this limitation is
minimal in our implementation, so possible mitiga-
tion solutions such as setting maximum waiting ne-
gotiation time are not required. A random controller
among those with the minimum ETD will be selected
for dispatch in order to prevent possible load imbal-
ance.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
162

4 EXPERIMENTS & RESULTS
In this section, we conduct a comprehensive compar-
ative analysis of the designed controllers, evaluating
their performance and ability to manage congestion
on the floors. The experiments were carried out using
the SARL Eclipse IDE, alongside an elevator simu-
lator featuring three simulated elevators. For a simi-
lar setup, please refer to the SARL elevator simulator
repository
2
.
4.1 Evaluation Framework
We evaluate the controllers based on two main param-
eters: i) the number of people in the elevator and ii)
the distribution of these people. For the first param-
eter, we consider scenarios with 20 and 60 people,
representing light and heavy load conditions, respec-
tively. Regarding the second parameter, we exam-
ine a variety of distribution scenarios, including ran-
dom and uniform distributions, as well as two types of
traffic bottlenecks: morning congestion, with passen-
gers starting on the lowest floor, and evening conges-
tion, with passengers distributed across upper floors
attempting to reach the lowest floor. This range of
scenarios ensures a comprehensive evaluation of the
system’s performance under different conditions.
4.1.1 Evaluation Metrics:
To evaluate the efficiency of the two controllers, we
focus on key metrics: the average wait time and travel
time for each passenger, which together reflect the to-
tal time required to fulfill a request. Additionally, we
measure the average travel distance covered by each
elevator to assess system effectiveness. The defini-
tions of these metrics are summarized in Table 2 be-
low.
To ensure reliable evaluation, we average results over
10 seeded runs, capturing diverse scenarios and min-
imizing random influences on the rule-based algo-
rithm’s performance.
Table 2: Evaluation metrics of the controller systems.
Metric Definition
Average
Total Time
Average time (ms) to answer a hall
call and deliver the passenger to
their destination.
Average
Travel Dis-
tance
Average distance (floors) traveled
by all elevator cars.
2
https://github.com/ssardina-agts/elevator-simulator
4.2 Experimental Results
This section presents the results of our comparative
study on centralized and distributed approaches to
SARL multi-agent systems for elevator control, sum-
marized in Tables 3 and 4. The analysis focuses on the
following performance metrics: waiting time, travel
distance, and energy consumption.
Table 3: Average total time in milliseconds: the average
sum of waiting time and travel time for each passenger.
Central Distributed
Passenger Count 20 60 20 60
Random 71,15 112,1 72,7 113,3
Morning 63,7 99,31 65,7 110,4
Evening 75,3 110,8 72,7 99,9
Table 4: Average car travel distance in floors: the average
total travel distance for a simulation run.
Central Distributed
Passenger Count 20 60 20 60
Random 169.7 177.7 176.5 184.1
Morning 163.7 235.0 166.7 215.0
Evening 287.5 315.0 330.0 374.2
While the results are somewhat consistent across
scenarios, passenger volume significantly affects re-
sponse time. Notably, in the evening scenario, system
efficiency declines. This is likely because all requests
are DOWN, effectively doubling travel distance, as el-
evators cannot pick up passengers while traveling UP.
4.3 Waiting Time
Our analysis, illustrated in Figure 4, shows a re-
duction in passenger waiting times with the dis-
tributed approach compared to the centralized ap-
proach. While Table 3 indicates that the distributed
approach can sometimes result in longer total travel
times, the Kernel Density Estimation (KDE) chart
reveals that passengers generally experience shorter
waiting times. This improvement stems from the
autonomy of individual elevators in the distributed
system, allowing them to respond dynamically to
changes in passenger demand. This adaptability leads
to significantly shorter waiting times, highlighting
the operational efficiency of the distributed control
paradigm.
4.4 Travel Distance
Travel distance for elevator cars emerged as a key
metric in evaluating system efficiency. Table 4
presents the average travel distance, measured in
Optimizing Elevator Performance with SARL Multi-Agent Systems: A Distributed Approach for Enhanced Responsiveness and Efficiency
163
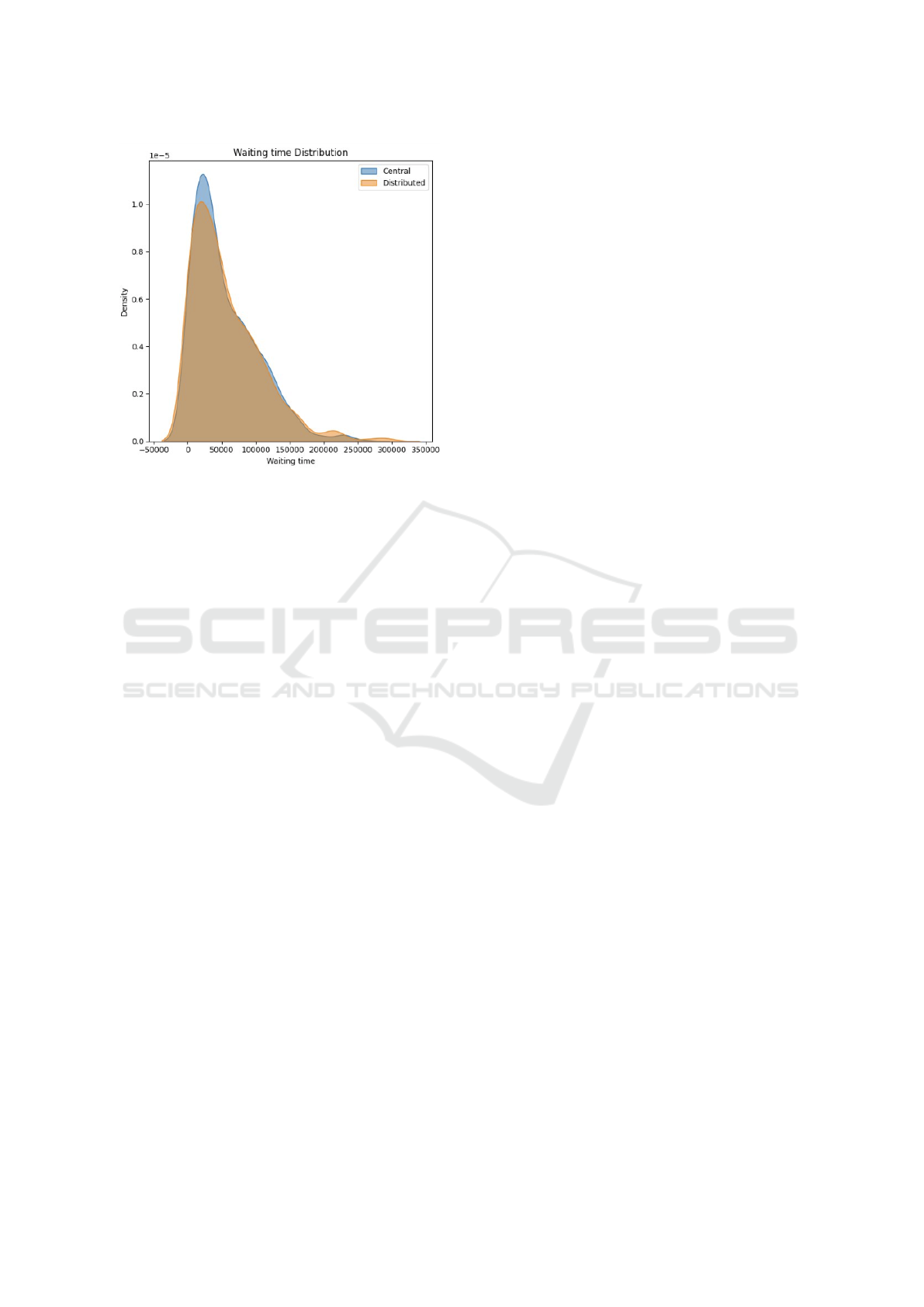
Figure 4: Waiting Time Distribution between two ap-
proaches.
floors, across various experimental scenarios.
The performance of centralized and distributed el-
evator systems is notably similar. In some scenar-
ios, such as the morning period, the distributed ap-
proach not only matches but occasionally outperforms
the centralized system, suggesting that the adaptabil-
ity of the distributed approach can lead to more effi-
cient operations. Future research could focus on im-
proving algorithms for evening scenarios, where per-
formance differences are more pronounced. Enhanc-
ing efficiency in high-traffic situations holds signifi-
cant potential for optimization.
4.5 Energy Consumption
Energy consumption is a crucial factor in elevator sys-
tems, particularly for sustainability. Our findings in-
dicate that the distributed approach, with its more ef-
ficient allocation of elevator cars, has the potential to
reduce overall energy consumption compared to cen-
tralized systems. Future research should delve deeper
into this by quantifying energy savings and evaluating
their relevance in larger, more diverse building com-
plexes.
4.6 DISCUSSION
Our evaluation reveals comparable performance be-
tween the controllers, with the distributed approach
demonstrating notable advantages in robustness and
efficiency. However, each controller has its own
strengths and limitations.
Robustness of Distributed Systems. The central-
ized controller is vulnerable to total system failure,
as it acts as a single point of failure. In contrast, the
distributed controller enhances resilience by ensuring
that a failure in one unit does not affect the entire
system. This robustness is a significant advantage of
the distributed approach. However, it also introduces
the potential for inconsistent system states, a common
challenge in distributed system theory (Sorsa et al.,
2009). Future implementations could benefit from
stronger consistency measures to address this limita-
tion effectively.
Comparison Between Centralized and Distributed
Controller. While the overall performance of both
controllers is similar, they differ in various aspects:
• The centralized controller operates independently
without the need to synchronize with external
controllers, resulting in improved decision time.
• Maintenance shutdowns for the centralized con-
troller entail a halt of the entire system in its cur-
rent state.
• The distributed controller enhances robustness by
eliminating a single point of failure.
• Although not evident during our evaluation, the
distributed controllers may face challenges in
maintaining a consistent state between them with-
out appropriate consistency guarantees.
While not directly reflective of the explored
method, it is important to note that during our ex-
periments, we found that the solution implementation
sometimes fails to respond to every request. We dis-
covered that due to concurrency issues, race condi-
tions arose where allocated requests would be lost.
Our manual testing shows that this mostly happens
during high-traffic scenarios (such as morning and
evening scenarios), with a drop rate of 6.5%.
Despite identified issues in both systems, we as-
sert that the distributed system exhibits greater re-
silience. The current challenges with the distributed
controller are primarily implementation-related, and
the observed increase in decision time during testing
is deemed acceptable. Consequently, we recommend
moving forward with the distributed controller for its
overall advantages in robustness and performance.
5 CONCLUSION
This study successfully developed two distinct ele-
vator system controllers, each demonstrating notable
improvements in responsiveness and efficiency. The
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
164

first controller design focuses on optimizing commu-
nication protocols through a set of largely indepen-
dent internal agents. The second design adopts a simi-
lar framework but places a greater emphasis on adapt-
ability and robustness. After comprehensive evalua-
tion and analysis, the distributed controller emerged
as the preferred choice, primarily due to its resilience
and potential for further improvements by addressing
current implementation challenges.
The distributed approach is particularly advan-
tageous due to its dynamic adaptation to fluctuat-
ing demands and its ability to operate independently.
This flexibility enhances the efficiency of systems like
queue management and resource allocation, where
such adaptability is crucial for maintaining continu-
ous and effective operation. When applied to queue
management, it can dynamically adjust resource allo-
cation based on real-time data, significantly reducing
wait times and improving service efficiency. Simi-
larly, in computing resource allocation, a distributed
approach allows for a more agile response to work-
load changes, optimizing the use of computational re-
sources and enhancing system performance.
Despite these advancements, the study faces cer-
tain limitations in both design and implementation.
Notably, the absence of real-world usage data makes
it challenging to refine Estimated Time to Dispatch
(ETD) predictions. During testing, decision-making
times require more detailed examination. While prac-
tical deployment could provide the necessary data, a
deeper look at time efficiency will be a focus for fu-
ture improvements. Another key consideration for
future development is adhering to core principles of
distributed systems, particularly in maintaining state
consistency. It is important to note that any delays
observed during testing of the distributed controller
were deemed acceptable when weighed against the
substantial benefits it offers.
In conclusion, we are confident that our proposed
approach lays the foundation for developing more ef-
ficient and user-friendly elevator system controllers,
enhancing the overall user experience. Future iter-
ations will address the identified limitations and ex-
plore real-world deployment further, aiming for a
more comprehensive understanding of the system’s
performance and its potential to elevate the standards
of elevator control systems.
REFERENCES
Al-Kodmany, K. (2023). Elevator technology improve-
ments: A snapshot. Encyclopedia, 3(2):530–548.
Fujino, A., Tobita, T., Segawa, K., Yoneda, K., and To-
gawa, A. (1997). An elevator group control system
with floor-attribute control method and system opti-
mization using genetic algorithms. IEEE Transactions
on Industrial Electronics, 44(4):546–552.
Giret, A., Botti, V., and Valero, S. (2005). Mas method-
ology for hms. In Holonic and Multi-Agent Sys-
tems for Manufacturing: Second International Con-
ference on Industrial Applications of Holonic and
Multi-Agent Systems, HoloMAS 2005, Copenhagen,
Denmark, August 22-24, 2005. Proceedings 2, pages
39–49. Springer.
Latif, M., Kheshaim, M., and Kundu, S. (2016). A review
of elevator dispatching systems. Engineering Letters,
24(1):23–31.
Mu
˜
noz, D. M., Llanos, C. H., Ayala-Rinc
´
on, M., van Els,
R., and Almeida, R. P. (2006). Implementation of
dispatching algorithms for elevator systems using re-
configurable architectures. In Proceedings of the 19th
annual symposium on Integrated circuits and systems
design, pages 32–37.
Pepyne, D. L. and Cassandras, C. G. (1998). Design and im-
plementation of an adaptive dispatching controller for
elevator systems during uppeak traffic. IEEE Trans-
actions on control systems technology, 6(5):635–650.
Rodriguez, S., Gaud, N., and Galland, S. (2014). Sarl:
a general-purpose agent-oriented programming lan-
guage. In 2014 IEEE/WIC/ACM International Joint
Conferences on Web Intelligence (WI) and Intelligent
Agent Technologies (IAT), volume 3, pages 103–110.
IEEE.
Rong, A., Hakonen, H., and Lahdelma, R. (2003). Esti-
mated time of arrival (ETA) based elevator group con-
trol algorithm with more accurate estimation. Turku
Centre for Computer Science.
Sakita, M. (2001). Elevator system with multiple cars in
one hoistway. Elevator World, 49(6):80–91.
Smith, R. (2002). Etd algorithm with destination dispatch
and booster options. Elevator world, pages 136–142.
Sorsa, J. S., Ehtamo, H., Siikonen, M., Tyni, T., and Ylinen,
J. (2009). The elevator dispatching problem. Trans-
portation Science.
Tanaka, S., Hoshino, D., and Watanabe, M. (2016). Group
control of multi-car elevator systems without accurate
information of floor stoppage time. Flexible Services
and Manufacturing Journal, 28:461–494.
Optimizing Elevator Performance with SARL Multi-Agent Systems: A Distributed Approach for Enhanced Responsiveness and Efficiency
165
