
Using MIRNet for Low Light Image Enhancement
Ethan Chen
1
, Robail Yasrab
2
and Pramit Saha
2
1
Mission San Jose High School, Fremont, California, U.S.A.
2
Cambridge Centre for International Research,U.K.
Keywords:
MIRNet, Image Enhancement, Deep Learning, Convolutional Neural Networks, Image Quality.
Abstract:
This study explores the application of MIRNet (Multi-scale Image Restoration Network), a deep learning
architecture designed for image enhancement. MIRNet uses convolutional neural networks (CNNs) to capture
image details and textures at various scales, enabling effective restoration and enhancement of low-quality
images. Experiments were conducted using the LoL and SICE datasets to validate and optimize MIRNet’s
performance. The results were compared with an existing image enhancement tool, demonstrating the superior
effectiveness of MIRNet even with architectural modifications or training on different data sets. The research
also explains MIRNet’s architecture and its approach to processing and enhancing image content. This work
highlights MIRNet’s potential to advance image enhancement through deep learning techniques.
1 INTRODUCTION
Deep learning has gained massive popularity due to
the widespread access to large amounts of data and
computing power. It shares many similarities to the
human brain and can perform a wide range of tasks,
including natural language processing, weather fore-
casting, etc. One such application is image analysis,
or more specifically, object detection, image segmen-
tation, or image classification. Image analysis has
had a profound impact on the modern world, being
used particularly often in medical diagnosis and auto-
mated driving. For example, image classification can
be used on X-rays, CT scans, and MRI scans to iden-
tify the type of diseases in a patient. Object detection
can be used to detect cars, traffic lights, and pedes-
trians during automated driving, allowing the AI to
drive better and safer. The accuracy and efficiency of
machine learning have been integral to the success of
these practices.
Image analysis is a powerful tool to solve com-
plex tasks. However, poor image quality such as noisy
or unlit photos can lead to inaccurate results, render-
ing it useless in certain scenarios. This study aims to
present a solution to this problem, MIRNet, as well as
how it works, and optimizations to its performance.
The first half of this paper will be dedicated to ex-
plaining the mechanics of deep learning and MIR-
Net, and the second half will be used to present the
research’s results.
2 LITERATURE REVIEW
2.1 Overview of Deep Learning in
Classification
The basis of deep learning is the neural network,
whose structure resembles that of a biological brain
in that it consists of neurons which can be activated
or deactivated depending on the state of other neu-
rons. Neural networks can be optimized to solve
deep learning tasks efficiently and effortlessly.(LeCun
et al., 2015)
A neural network typically consists of an input
layer, an output layer, and one or more hidden layers,
with each layer consisting of multiple neurons. Each
neuron is essentially a node which stores a number.
Figure 1: Example structure of a neural network (Source:
(Parmar, 2018)).
The number of neurons in the input layer depends
on the size of the input. For example, in the MNIST
dataset, the input consists of 28 by 28 black and
white images of handwritten digits ranging from zero
280
Chen, E., Yasrab, R. and Saha, P.
Using MIRNet for Low Light Image Enhancement.
DOI: 10.5220/0013099600003911
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 18th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2025) - Volume 1, pages 280-287
ISBN: 978-989-758-731-3; ISSN: 2184-4305
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
through nine. In this case, the input layer would have
28 × 28 = 784 neurons. When an image is passed
into the input layer, the value of each neuron is multi-
plied by some weight and added together along with a
bias and passed through an activation function to get
the value of one particular neuron in the first hidden
layer. The weights and biases are different for each
neuron in the first hidden layer. This process repeats
for each hidden layer and finally passed into the out-
put layer. The number of neurons in the output layer
depends on the number of desired outputs. In the case
of the MNIST dataset, we want a probability for each
digit from zero through nine, thus the output layer
would have 10 neurons. In order to determine the ex-
act weights and biases to be used, we must train the
neural network. Training typically involves feeding
the neural networks lots of labeled inputs and having
the neural network adjust its weights and biases ac-
cordingly. This process is known as backpropagation
(LeCun et al., 2015).
The neural network described above is known as a
“fully connected” neural network. It is typically used
in classification tasks such as the one described us-
ing the MNIST data set. Another type of neural net-
work commonly used in image analysis is the Convo-
lutional Neural Network (CNN). CNNs consist of an
input layer, convolutional layers, pooling layers, and
an output channel. The input layer can be described
as a H × W × C tensor, where W and H represent the
width and height of the image, and C represents the
number of channels. Gray-scaled images have one
channel, while RGB images have three. When an im-
age is passed into a CNN, it will likely go through a
convolutional layer. In this layer, the image is treated
with a smaller matrix called a kernel in a process
known as a convolution. This layer produces an out-
put with different dimensions and number of chan-
nels, and depending on the kernel, alters the image in
one of many different ways, such as blurring, sharp-
ening, highlighting edges, etc. CNNs may also con-
tain pooling layers, where the size of the input tensor
is reduced by taking the max or average of a window
of numbers. Pooling layers can help the neural net-
work conserve memory and improve efficiency (Le-
Cun et al., 2015).
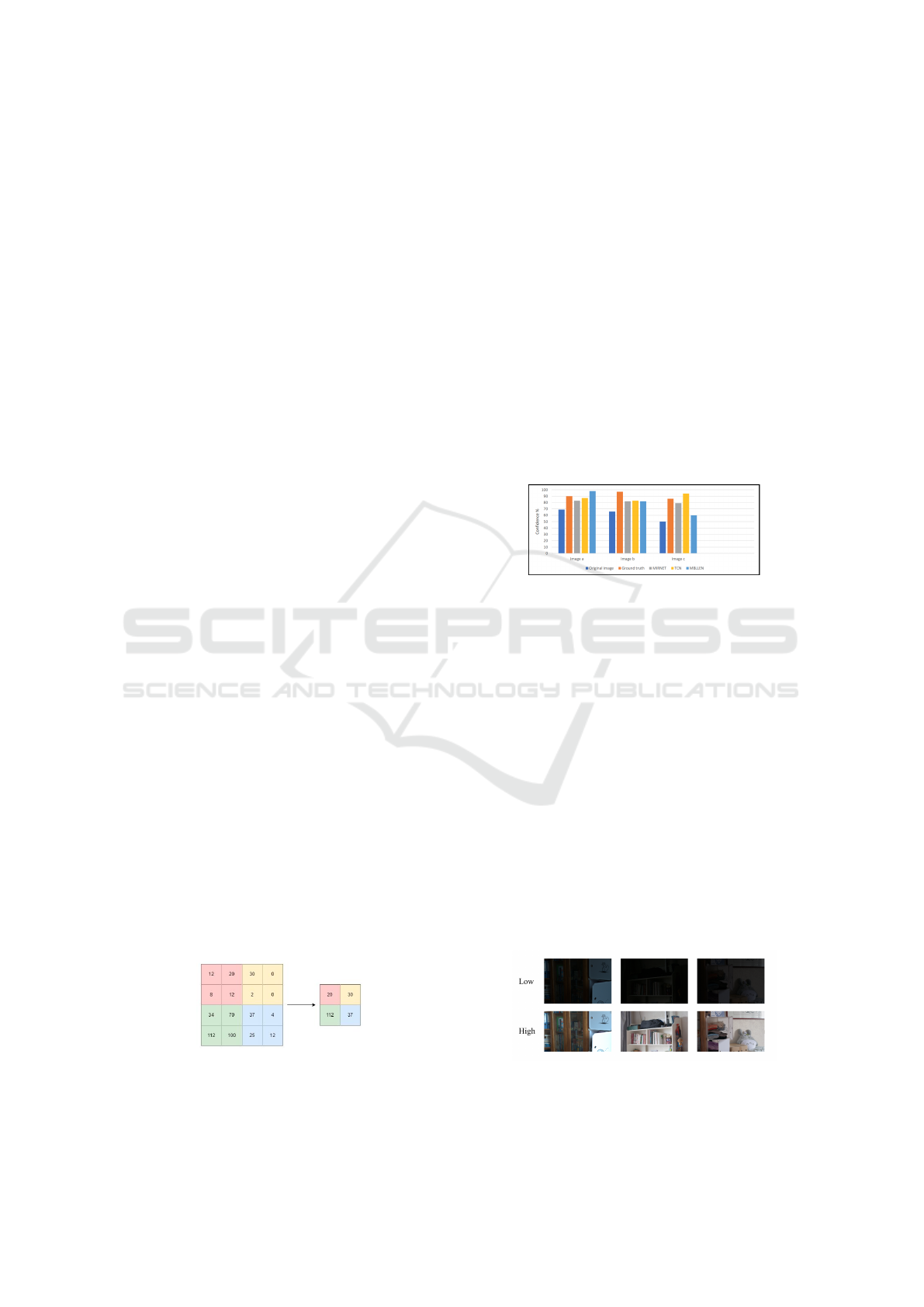
Figure 2: Max pooling (Image source: (Nanos, 2023)).
A CNN usually contains multiple convolutional
and pooling layers. The output of the CNN can be fed
into a fully connected layer for classification, and the
results will be much more accurate than just a fully
connected layer alone.
2.2 Related Studies and Projects
The original paper for MIRNet by S.W. Zamir et al.
describes in depth how each part of MIRNet’s archi-
tecture functions and can be found here:(Zamir et al.,
2003)
Aaryan Agrawal et al. have a paper on using
low light image enhancement models to improve ob-
ject detection under poor lighting conditions. In
the paper, they describe the results of three differ-
ent low light enhancement models, namely, MIRNet,
TCN, and MBLLEN, all of which use a convolu-
tional network. The confidence values of each test
are shown:(Agrawal et al., 2022)
Figure 3: Research Results of Aaryan Agrawal et al.
3 METHODOLOGY
3.1 Dataset Description
The two datasets used throughout this research are the
Low Light (LoL) dataset and the Single Image Con-
trast Enhancement (SICE) dataset.
The LoL dataset consists of 500 image pairs,
each of which contains a low-light input image and
a normal-light reference image. All images in the
dataset have a resolution of 400 by 600 and many con-
tain noise produced during the photo capture process.
Most of these images are taken indoors. For train-
ing and validation, random crops of 128 by 128 were
generated before feeding them to the network. For all
experiements, 300 images were used for training, 185
images for validation, and 15 images for testing.
Figure 4: Example Images from LoL Dataset.
The SICE dataset contains 589 high-resolution se-
Using MIRNet for Low Light Image Enhancement
281

quences, with each sequence having multiple images
each with different levels of exposure. The SICE
dataset is split into two parts, the first part containing
360 image sequences, and the second part containing
the rest. Due to limited resources, only the lowest
level of exposure for each image of the first part of
this dataset was used. The training process remains
the same as the LoL dataset, with random crops of
128 by 128 generated before feeding the data to the
network. Likewise, 300 images were used for train-
ing, 185 images for validation, and 15 images for test-
ing.
Figure 5: Example images from SICE Dataset.
3.2 Model Selection and Architecture
MIRNet enhances images by utilizing a multi-scale
approach to address different levels of details in an
image (more on this later). MIRNet also employs a
residual design to allow for a much deeper architec-
ture(Zamir et al., 2003).
Figure 6: Overall Architecture of MIRNet.
When a colored image I of dimensions H × W × 3
is passed into MIRNet, it first goes through a convo-
lution layer to extract low level features. The output,
X
0
, a feature map of dimensions H × W × C where
C is the number of channels, is then passed through
N recursive residual groups (RRGs) to obtain a deep
feature map X
d
of dimensions H × W × C. Next, X
d
is passed through a convolutional layer to obtain a
residual image R of dimensions H × W × C. Finally,
the residual image and the original image are concate-
nated via simple summation to obtain the output im-
age
ˆ
I. Within each RRG, the incoming feature map X
i
is passed through a convolutional layer followed by P
multi-scale residual blocks (MRBs) and then another
convolutional layer to obtain a feature map, which is
then concatenated with the original X
i
to obtain fea-
ture map X
i+1
. (Zamir et al., 2003)
The MRB can mimic the visual cortex of humans
by maintaining multiple fully convolutional parallel
streams of different resolutions that exchange infor-
mation to generate an output which is both spatially
and contextually precise (see Figure 6 for detailed ar-
chitecture). (Zamir et al., 2003)
As can be observed in Figure 6, in the beginning
of the MRB and during information exchange, fea-
ture maps entering or exiting different streams must
be downsampled or upsampled to be consistent with
the resolution of each stream. The upsampling and
downsampling module used in the MRB can be ob-
served in Figure 7. In summary, in a downsampling
module, an incoming feature map M of dimensions
H × W × C goes through a series of layers and is con-
catenated with a skip connection to produce an output
feature map of dimensions
H
2
×
W
2
× 2C. Similarly,
an upsampling module takes in a feature map M of
dimensions H × W × C and outputs a feature map of
dimensions 2H × 2W ×
C
2
(Zamir et al., 2003).
Figure 7: Detailed image of up/down sampling modules.
In order to share information across streams, the
MRB uses a Dual Attention Unit (DAU). The DAU
can filter irrelevant features, sharing only the useful
information. The DAU consists of two parts: a Spa-
tial Attention (SA) branch and a Channel Attention
(CA) branch. In the end, the output of each branch is
concatenated and passed on (Zamir et al., 2003).
The SA branch can determine the inter-spatial re-
lationships in the incoming feature map M and re-
calibrate features in M. It does this by applying a
Global Average Pooling (GAP) layer and a Global
Max Pooling (GMP) layer to M and then concatenat-
ing the results to get a feature map f , with dimensions
H × W × 2. Next, f is passed through a convolution
and a sigmoid activation function to get a spacial at-
tention map
ˆ
f . Finally, M is rescaled using
ˆ
f and out-
putted from the SA branch (Zamir et al., 2003).
The goal of the CA branch is to determine the
inter-channel relationships and recalibrate M accord-
ingly. It uses a squeeze and excitation mechanism to
determine which channels are more important, and
which ones can be disregarded (a more detailed ex-
planation can be found here: (Pr
¨
ove, 2017)). It does
this by passing the incoming feature map M through a
GAP layer and then two convolution layers followed
by a sigmoid activation function to get channel acti-
vations d. M is then rescaled using d and outputted
from the CA branch (Zamir et al., 2003).
BIOIMAGING 2025 - 12th International Conference on Bioimaging
282
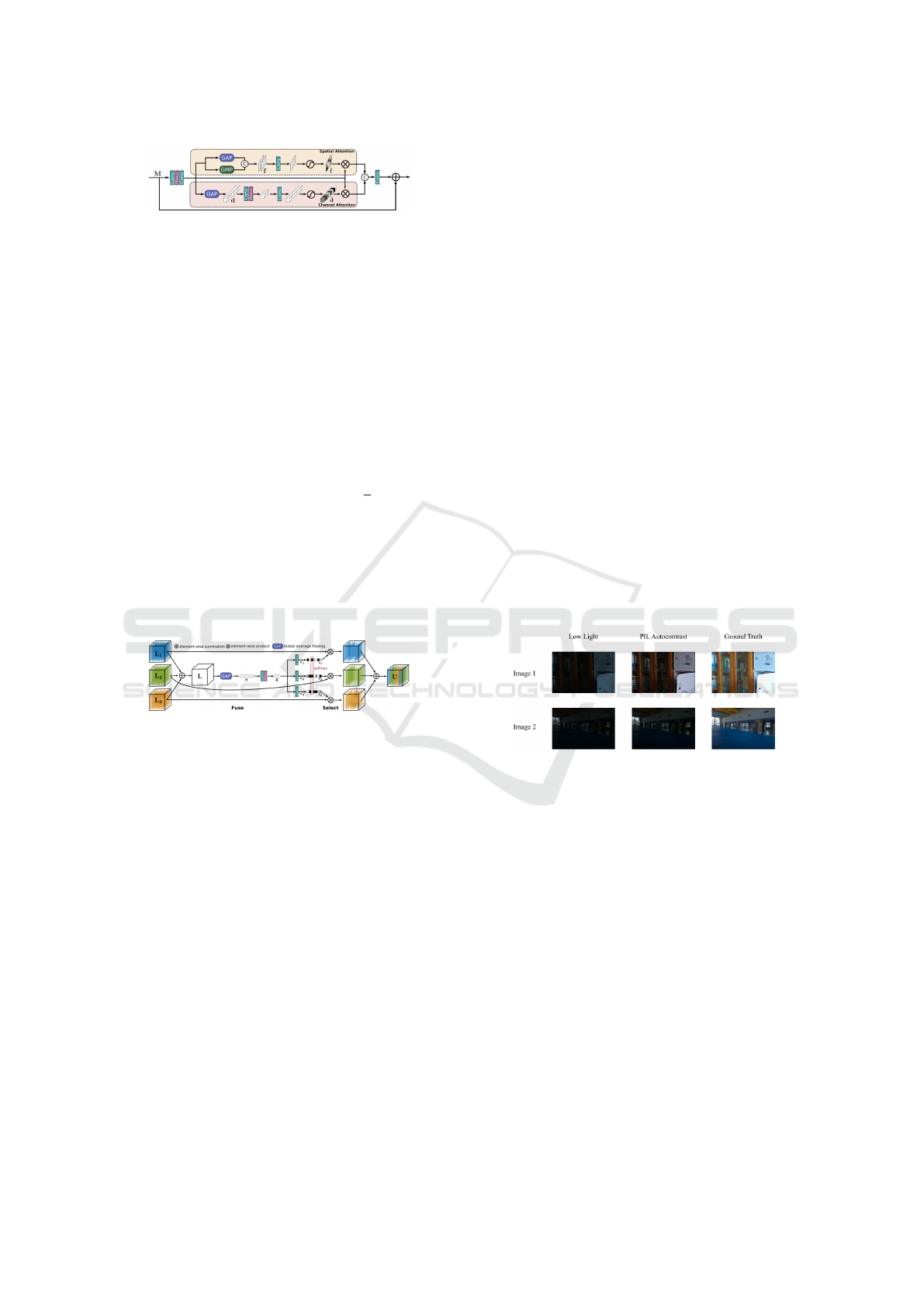
Figure 8: Detailed image of DAU block.
The last component of the MRB is the Selective
Kernel Feature Fusion (SKFF), which is responsible
for fusing features from multiple streams. It is able to
mimic a human’s visual cortex in that it can change
its receptive field depending on the stimulus, by us-
ing feature aggregation and selection. The SKFF can
be divided into two parts: Fuse and Select. In the
Fuse section, the three incoming feature maps L
1
, L
2
,
and L
3
are concatenated via element-wise summation
to get the feature map L = L1 + L2 + L3. Next, L is
passed through a GAP layer to get channel wise statis-
tics of dimensions 1 × 1 × C, which is then passed
through a convolution layer to get compact channel
wise statistics z of dimensions 1 × 1 ×
C
8
. Finally, z
is passed through three parallel convolution layers to
get 3 channel descriptions v
1
, v
2
, and v
3
each of di-
mensions 1 × 1 × C. In the Select section, v
1
, v
2
, and
v
3
undergo a softmax activation to get attention acti-
vations s
1
, s
2
, and s
3
. Lastly, the output feature map
U is given by U = s
1
L
1
+ s
2
L
2
+ s
3
L
3
(Zamir et al.,
2003).
Figure 9: Detailed image of SKFF block.
3.3 Model Training Process
The model uses the Charbonnier Loss function and
the Adam Optimizer during the training process. By
default, the model runs with a batch size of four and
starts at a learning rate of 1e-4. It uses three RRGs,
with each RRG containing two MRBs, and the num-
ber of channels C of X
0
is set to 64. In each exper-
iment, only a few if not one hyper parameter were
modified to test its impact on the model’s perfor-
mance.
4 EXPERIMENTAL RESULTS
4.1 Experimental Setup
All experiments were run on Google Colab, which
runs on a Ubuntu OS and uses an Intel Xeon CPU
with 2 vCPUs and 13 GB of RAM, and a NVIDIA
Tesla K80 GPU with 12GB of VRAM.(Anonymous,
2023) The MIRNet code is written primarily using the
TensorFlow framework. TensorFlow provides many
useful features such as reading images and resizing
tensors. In addition, it allows the use of the Keras
API, which allows the user to easily build neural net-
work architectures with their built-in layers, such as
Convolution (Conv) 2d, Global Average Pooling 2d,
Global Max Pooling 2d, etc. The code also uses the
auto contrast feature from the PIL library as a baseline
to compare low light enhancement results of MIRNet
and this existing feature.
4.2 Performance Evaluation and
Analysis
The model is evaluated quantitatively using two main
methods: the loss function and the PSNR of the out-
put image. For each experiment, the minimum valida-
tion loss and maximum validation PSNR at any point
in the training process will be shared in this paper. In
addition, this paper also contains the overall trend of
the loss and PSNR during training, including both the
test and validation datasets. Finally, it also includes
two sample images from the LoL Dataset test set,
which can be interpreted qualitatively by the reader.
Figure 10: Two test images.
To start, here are the two images used throughout
the paper. PSNR of the PIL autocontrasted version of
each test image by comparing it with its correspond-
ing ground-truth image. The average PSNR of all 15
PIL autocontrasted images is about 11.2416.
4.2.1 Experiment 1
The first experiment involves training the model with
the default hyper parameters, which, unsurprisingly,
yielded great results from the LoL dataset, as the
model has already been optimized greatly for the LoL
dataset. The minimum loss is 0.0983, and the maxi-
mum PSNR is 67.5981.
Using MIRNet for Low Light Image Enhancement
283

Figure 11: Experiment 1 Results.
4.2.2 Experiment 2
To test whether the model has completely plateaued,
the second experiment ran for 70 epochs. The results
are almost identical, with a minimum loss of 0.1016,
and a maximum PSNR of 67.8371, just marginally
greater than the previous, indicating that the model
has likely reached its full potential in just 50 epochs.
Judging by how little has changed, the rest of my ex-
periments on the LoL dataset were run on 50 epochs
to save resources.
Figure 12: Experiment 2 Results.
4.2.3 Experiment 3
Increasing the batch size from 4 to 8 caused the model
to crash during training due to a lack of memory.
4.2.4 Experiment 4
Increasing the random crop size from 128 by 128 to
256 by 256 caused the model to crash during training
due to a lack of memory.
4.2.5 Experiment 5
The Charbonnier loss function is really similar to the
root mean square error function, except it adds a small
constant to stabilize the training process. In this ex-
periment, the root mean square function is used in-
stead. The maximum PSNR for this experiment is
68.2198. Since the loss function is different compared
to the other experiments, it is unsuitable to use it as a
metric to evaluate the model’s performance in this ex-
periment compared to the other experiments.
Figure 13: Experiment 5 Results.
4.2.6 Experiment 6
An initial learning rate of 1e-3, yielded a minimum
loss of 0.1269 and a maximum PSNR of 65.4208.
However, these values are not representative of the
overall training curve. When excluding the first two
epochs, a minimum loss of 2678.81 and maximum
PSNR of -20.8327 is the best the model can do.
Figure 14: Experiment 6 Results.
4.2.7 Experiment 7
An initial learning rate of 1e-5, yielded a minimum
loss of 0.1049 and a maximum PSNR of 67.083.
Figure 15: Experiment 7 Results.
4.2.8 Experiment 8 - 11
For each of these experiments, a change was made
to the model’s architecture. Since all 4 experiments
yielded similar results, the results are presented in a
table. Figure 16 is what the best performing experi-
ment looks like.
BIOIMAGING 2025 - 12th International Conference on Bioimaging
284
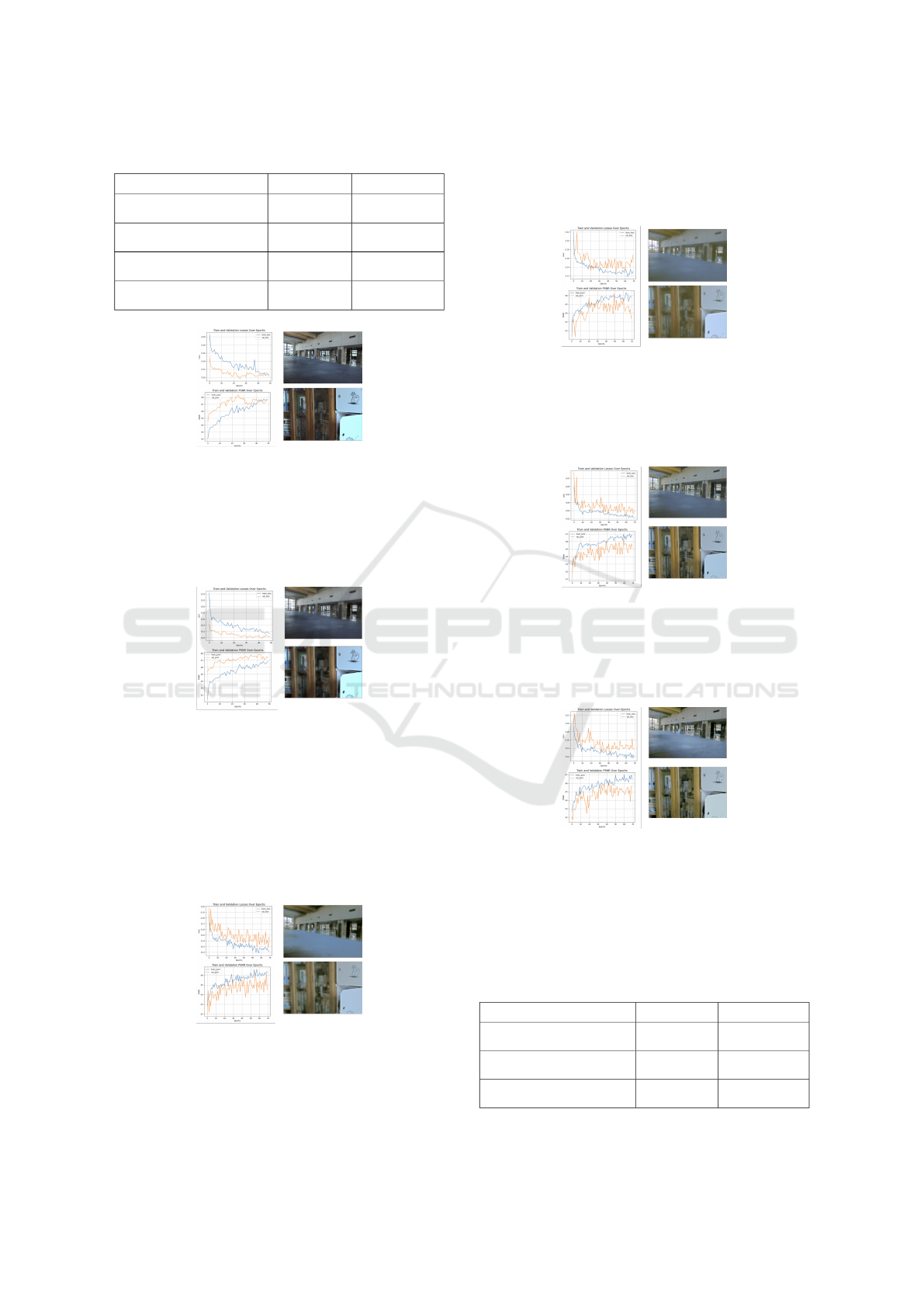
Table 1: Experiment 8 - 11 Results.
Change Minimum Loss Maximum PSNR
8. Increased the number of
MRBs per RRG by 1.
0.0965 68.3952
9. Changed the number of
channels of X0 to 32.
0.0977 68.1555
10. Changed the number of
channels of X0 to 96.
0.1009 67.8281
11. Added 1 parallel stream
to the SKFF
0.099 67.8437
Figure 16: Experiment 8 Results.
4.2.9 Experiment 12
Decreasing the number of RRGs and MRBs to 1
yielded a minimum loss of 0.1049 and maximum
PSNR of 67.083.
Figure 17: Experiment 12 Results.
4.2.10 Experiment 13
Moving on to the SICE Dataset, this experiment ran
for 70 epochs on the default values. The result of this
run shows a minimum loss of 0.1217 and a maximum
PSNR of 66.0102. Since the graph does not show an
obvious sign of a plateau, all subsequent experiments
were trained for 70 epochs.
Figure 18: Experiment 13 Results.
4.2.11 Experiment 14
An initial learning rate of 1e-5 yielded a minimum
loss of 0.1244 and a maximum PSNR of 66.3333.
Figure 19: Experiment 14 Results.
4.2.12 Experiment 15
Using root mean square loss, yielded a minimum loss
of 0.1217 and a maximum PSNR of 66.0102.
Figure 20: Experiment 15 Results.
4.2.13 Experiment 16
4 RRGs with 3 MRBs per, yielded a minimum loss of
0.1217 and a maximum PSNR of 66.3105.
Figure 21: Experiment 16 Results.
4.2.14 Experiment 17 - 19
The results of these three experiments are presented
in a table, as they are very similar. Figure 22 shows
the best performing run out of the three.
Table 2: Experiment 17 - 19 Results.
Change Minimum Loss Maximum PSNR
17. Decreased the number of
RRGs to 2.
0.1217 66.0889
18. Increased the number of
RRGs to 4.
0.1262 66.5826
19. Changed the number of
channels of X0 to 32.
0.1223 66.3105
Using MIRNet for Low Light Image Enhancement
285

Figure 22: Experiment 18 Results.
4.3 Discussion of Findings
The experiments yielded four key observations. First,
the loss and PSNR graphs for both training and val-
idation were less stable for the SICE Dataset com-
pared to the LoL Dataset. This instability is likely
due to the higher resolution of images in the SICE
Dataset, where a 128 × 128 crop may not be as rep-
resentative of the entire image as it would be for a
lower-resolution image. Second, the model’s learn-
ing rate must be carefully balanced; a rate too high
can cause overshooting, while a rate too low can re-
sult in the model getting stuck. Third, increasing the
complexity of the network does not necessarily lead
to better performance. This was unexpected, as it was
initially assumed that a more complex network, with
an increased number of weights, would yield superior
results. Lastly, architectural changes that have min-
imal impact on the model’s performance on the LoL
Dataset can significantly affect its performance on the
SICE Dataset, particularly changes in the total num-
ber of MRBs and channels.
Overall, the model performed well on both
datasets. Achieving a PSNR value above 40, which is
generally considered good, demonstrates the model’s
strong performance.
5 CONCLUSION
5.1 Summary of Findings
Based on the quantitative and qualitative data, several
conclusions were drawn for both the LoL and SICE
Datasets.
For the LoL Dataset, it was observed that train-
ing for more than 50 epochs does not improve per-
formance, and doubling the batch size or increasing
the random crop size makes the model too resource-
intensive. Additionally, changing the loss function
from root mean square error to mean square error does
not enhance performance. The optimal initial learn-
ing rate was determined to be 1e-4. While increasing
the number of MRBs slightly improved performance,
other changes to the model’s architecture did not yield
significant benefits. However, decreasing the num-
ber of MRBs did worsen performance, though not as
much as initially expected.
For the SICE Dataset, training for more epochs led
to better performance, with the optimal initial learn-
ing rate also being 1e-4. Similar to the LoL Dataset,
changing the loss function had no impact on perfor-
mance. Increasing the number of MRBs provided a
slight improvement, but other architectural changes
tended to decrease performance.
5.2 Implications and Applications
Given MIRNet’s strong performance on the SICE
dataset, it has demonstrated versatility with numerous
potential real-world applications.
In photography and videography, MIRNet offers
a promising solution for improving image quality un-
der poor lighting conditions or low exposure. In the
domain of low light object detection, MIRNet could
enhance accuracy in settings such as nighttime envi-
ronments, which is crucial for automated driving and
surveillance. The results from the paper “Improving
the Accuracy of Object Detection in Low Light Con-
ditions using Multiple Retinex Theory-based Image
Enhancement Algorithms” by Aaryan Agrawal et al.
suggest MIRNet as a viable option for this task.
In archaeology and geology, MIRNet can address
the challenge of gathering prehistoric data in low light
environments, such as underground caves or man-
made tunnels, through low light image enhancement.
Similarly, MIRNet can be employed in underwater
exploration, where lighting conditions at great depths
are often poor, resulting in low-quality images. By
enhancing these images, MIRNet could enable sci-
entists to explore previously unreachable areas of the
ocean.
Lastly, in astrology, where celestial images may
be noisy or low quality due to the challenges of cap-
turing images from vast distances, MIRNet can pro-
vide higher quality images, aiding researchers in bet-
ter understanding the universe.
Note that data from each of these were not ex-
perimented with in the research, but judging by the
promising performance of the model on the SICE
dataset, it is reasonable to conclude that this per-
formance would not change given other low light
datasets.
5.3 Limitations and Future Work
The findings and observations in this article are not
exhaustive and much more remains to be explored.
However, due to time constraints and limited compu-
BIOIMAGING 2025 - 12th International Conference on Bioimaging
286

tational resources, only a limited number of experi-
ments were conducted for each parameter, which may
not be sufficient to draw conclusions. Therefore, the
conclusions in this paper should be viewed as a gen-
eral guide for optimizing MIRNet’s architecture.
Several aspects could not be tested due to resource
and time limitations. These include exploring every
combination of four or fewer RRGs, four or fewer
MRBs, and two to four parallel streams; testing more
intermediate values for parameters such as batch size,
crop size, and number of channels; and experiment-
ing with additional low-exposure datasets focused on
specific tasks, such as underwater images, security
footage, celestial objects, or human faces.
Despite these limitations, MIRNet’s strong perfor-
mance on alternative datasets suggests it could be a
powerful tool in the future of AI technology, with sig-
nificant potential for real-world applications.
REFERENCES
Nanos, G. (2023). Neural networks: Pooling layers. Bael-
dung.
Agrawal, A., Jadhav, N., Gaur, A., Jeswani, S., and Kshir-
sagar, A. (2022). Improving the accuracy of object de-
tection in low light conditions using multiple retinex
theory-based image enhancement algorithms. IEEE
Xplore.
Anonymous (2023). Whats the hardware spec for google
colaboratory. Saturn Cloud.
LeCun, Y., Bengio, Y., and Hinton, G. (2015). Deep learn-
ing. Nature.
Parmar, R. (2018). Training deep neural networks. Towards
Data Science.
Pr
¨
ove, P.-L. (2017). Squeeze-and-excitation networks. To-
wards Data Science.
Zamir, S., Arora1, A., Khan, S., Hayat, M., Khan, F., Yang,
M., and Shao, L. (2003). Learning enriched features
for real image restoration and enhancement. Springer.
Using MIRNet for Low Light Image Enhancement
287
