
ML-Based Virtual Sensing for Groundwater Monitoring in the
Netherlands
Laure Grisez
1
, Shreshtha Sharma
2
and Paolo Pileggi
2a
1
Applied Mathematics, ENSTA Paris, France
2
Advanced Computing Engineering, TNO, The Netherlands
Keywords: Machine Learning, Groundwater Monitoring, Virtual Sensors, Gaussian Process Regression,
Graph Neural Networks, Spatial Interpolation.
Abstract: The increasing need for effective groundwater monitoring presents a valuable opportunity for Machine
Learning (ML)-based virtual sensing, especially in regions with challenging sensor networks. This paper
studies the practical application of two core ML models, Gaussian Process Regression (GPR) and Position
Embedding Graph Convolutional Network (PEGCN), for predicting groundwater levels in The Netherlands.
Additionally, other models, such as Graph Convolutional Networks and Graph Attention Networks, are
mentioned for completeness, offering a broader understanding of ML methods in this domain. Through two
experiments, sensor data reconstruction and virtual sensor prediction, we consider model performance, ease
of implementation, and computational requirements. Practical lessons are drawn, emphasising that while
advanced models like PEGCN excel in accuracy for complex environments, simpler models like GPR are
better suited for non-experts due to their ease of use and minimal computational overhead. These insights
highlight the trade-offs between accuracy and usability, with important considerations for real-world
deployment by practitioners less familiar with ML.
1 INTRODUCTION
Groundwater monitoring is essential for sustainable
water resource management, particularly in countries
like The Netherlands, where precise groundwater data
supports flood control, irrigation, drinking water
supply, and environmental protection.
Traditional monitoring approaches rely heavily on
physical sensor networks, which are costly and often
impractical to deploy and maintain due to logistical,
legal, and geographic constraints. This has opened up
a significant opportunity for Machine Learning (ML)-
based virtual sensing systems to predict groundwater
levels in regions where physical sensors are lacking,
improving monitoring coverage and operational
efficiency.
This paper presents an investigation into the
practical application of two relevant ML models for
virtual groundwater level sensing, namely Gaussian
Process Regression (GPR) and Position Embedding
Graph Convolutional Network (PEGCN).
a
https://orcid.org/0009-0001-6031-201X
GPR is well-known for its ability to model spatial
correlations and estimate uncertainty, making it a
strong candidate for environments where predictive
reliability is critical. PEGCN, by contrast, employs a
graph-based framework enhanced with positional
encoding, allowing it to better capture complex
spatial relationships in sensor networks. This study
aims to evaluate the strengths and weaknesses of
these models in terms of their performance,
scalability, and adaptability to groundwater
monitoring needs.
In addition to GPR and PEGCN, we also mention
other models, including Graph Convolutional
Networks (GCN) and Graph Attention Networks
(GAT). These models are mentioned to provide a
holistic view of available ML techniques for spatial
interpolation tasks. This exploration allows us to
learn valuable lessons, particularly concerning their
readiness for use in practical situations by non-expert
users, such as water resource managers or
environmental engineers with limited ML expertise.
Grisez, L., Sharma, S. and Pileggi, P.
ML-Based Virtual Sensing for Groundwater Monitoring in the Netherlands.
DOI: 10.5220/0013101100003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 3, pages 175-184
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
175

Beyond performance metrics like accuracy, this
paper highlights crucial practical considerations such
as ease of implementation, computational
complexity, and the resource demands associated
with each model. These factors are essential for real-
world applications, as they determine the feasibility
of adopting ML models in routine groundwater
monitoring tasks. This study provides insights into
the trade-offs between model accuracy and practical
usability, helping guide model selection based on
specific geographic conditions, operational
requirements, and user expertise.
The remainder of the paper is organised as
follows: Section 2 provides background on
groundwater monitoring and the ML techniques
considered. Section 3 reviews related work. Section 4
presents the case study, implementation details, and
experimental results. Section 5 discusses the lessons
learned and concludes with potential directions for
enhancing ML-based virtual sensing systems in
groundwater monitoring.
2 BACKGROUND
2.1 Groundwater Level Measurement
Groundwater level measurement provides crucial
insights into subsurface water dynamics, particularly
in The Netherlands, where effective water
management is vital due to its low-lying geography
and high population density. Integrating ML with
sensor data enables more accurate spatial and
temporal interpolation, improving predictions in
unmonitored areas.
ML-based virtual sensors exploit real-world data
from sensor networks to estimate groundwater levels
where direct measurements are unavailable.
Typically installed in boreholes, these sensors record
water levels continuously, helping to understand
seasonal variations and human impacts. In regions
with sparse networks, ML models fill gaps using
historical sensor data, even when some sensors have
missing or incomplete records.
In The Netherlands, various organisations manage
groundwater sensor networks, with platforms like the
Dutch Hydrological Information Platform (HYDAP)
offering access to real-time and historical
groundwater data. These platforms collect, store, and
analyse sensor measurements, providing valuable
data for researchers, policymakers, and engineers.
Users can access sensor data through APIs or web
portals, enabling integration with analytical tools for
data analysis and modelling.
ARGUS is another such a platform developed by
Aveco De Bondt. It plays a significant role in
groundwater monitoring across the country. The
platform is designed to support waterboards,
municipalities, and drinking water companies by
aggregating and analysing groundwater data from a
wide network of sensors deployed across the country.
This platform monitors these water levels in real-
time, enabling more informed decision-making for
flood control, water management, and environmental
protection. Using advanced data visualisation and
predictive analytics, it helps assess trends, manage
risks, and optimise water strategies by integrating
data from diverse sources, like local sensors and
national datasets. This enhances operational
efficiency in water management, offering insights for
both immediate actions and long-term planning.
Groundwater monitoring is uniquely challenging
due to its slow response to external factors compared
to surface water. For readers interested in a more
comprehensive understanding of groundwater
monitoring techniques, including sensor systems and
hydrological modelling, we recommend the
consulting a popular text (Rothman, 2021).
2.2 Gaussian Process Regression
Primer
GPR is a non-parametric, Bayesian approach to
regression that is particularly useful for modelling
complex, multi-dimensional datasets. It is preferred
in geospatial analysis and environmental modelling
due to its ability to provide a probabilistic framework
and quantify the uncertainty in predictions for making
informed decisions in these fields.
It models the observed data 𝑦 at locations 𝑋 using
a Gaussian process (GP), which is a collection of
random variables, any finite number of which have a
joint Gaussian distribution.
A GP is fully specified by its mean function m
x
and covariance function 𝑘
𝑥, 𝑥
. Typically, m
x
is
taken as zero, and the focus is on the choice of the
covariance function 𝑘
𝑥, 𝑥
, also known as the
kernel, which encodes assumptions about the function
to be learned.
The kernel function determines the shape of the
covariance between pairs of points in the input space.
A popular choice for capturing varying degrees of
smoothness in the underlying function is the Matérn
kernel, where 𝑉 controls the smoothness of the
function. 𝑉 allows the kernel to interpolate between
different levels of smoothness. E.g., when 𝑉=0.5, it
reduces to the exponential kernel, producing less
smooth functions. As 𝑉 increases, the resulting
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
176

functions become smoother, with the kernel
converging to the squared exponential kernel as 𝑉→
∞.
GPR is well-suited for environmental modelling
and geospatial analysis. Its flexible kernel function
can be customised to fit diverse data types and
structures. As a non-parametric method, it adapts to
complex data patterns without requiring predefined
models. For readers seeking to explore the theory and
applications of GPR in depth, (Rasmussen, 2006)
provides comprehensive coverage.
2.3 Deep Learning for Spatial
Reconstruction
Deep Learning (DL) has significantly advanced the
field of ML. There are powerful tools to model
complex data structures and extract meaningful
patterns. Among the various architectures,
Transformer architectures and Graph Neural
Networks (GNN) have emerged as particularly
influential for handling structured data, especially in
spatial reconstruction tasks.
Transformers, introduced by (Vaswani, 2017),
represent a breakthrough in sequence modelling that
has since been adapted for a wide range of tasks
beyond natural language processing. The
Transformer’s self-attention mechanism allows the
model to weigh the influence of different parts of the
input data, particularly useful for modelling
sequential data where the context and order of data
points are crucial.
On the other hand, GNNs are powerful tools for
learning representations of nodes and edges within a
graph. These representations are refined by
aggregating information from neighbouring nodes
and edges, enabling the model to propagate
information effectively across the entire graph.
Unlike traditional neural networks, GNNs use the
graph structure during learning. This is especially
beneficial for spatial data where the relationships
between data points are determined by their
connectivity, rather than merely by their order or
proximity. They are highly flexible and adaptable,
capable of handling various types of graphs,
including directed, undirected, weighted, and multi-
relational graphs. This makes them suitable for a
broad range of applications, from analysing
molecular structures to understanding dynamics
within social networks.
In spatial reconstruction, GNNs have been used to
model physical processes where data is naturally
represented as a network of interconnections, e.g.,
river networks, road networks. They have been
employed to predict traffic flow, model water
distribution in rivers, and simulate the spread of
pollutants in air or water networks. By using GNNs,
researchers can incorporate both the spatial
arrangement and the physical or functional
connectivity between data points, leading to more
accurate and context-aware predictions.
Recent research has explored combining
Transformer architectures with GNNs to exploit the
self-attention mechanism's ability to process
sequential dependencies and GNNs’ capacity to learn
from graph-structured data. This hybrid approach is
particularly potent for spatio-temporal data, where
both the temporal dynamics and the spatial
connections must be understood and modelled
effectively.
One of the promising applications of this hybrid
approach is in environmental science, where models
need to capture complex interactions over both time
and space, such as the evolution of weather patterns,
the spread of contaminants, or the changes in
groundwater levels. By integrating Transformers with
GNNs, models can better capture the multifaceted
nature of these processes, leading to more accurate
predictions and deeper insights into the underlying
phenomena. For detailed elaborations on graph
representation learning and transformer architectures,
interested readers are referred to the respective works
of (Rothman, 2021; Hamilton, 2020).
3 RELATED WORK
Groundwater level prediction research features the
study of various ML techniques, ranging from
traditional methods to cutting-edge DL models.
Classical regression methods, such as GPR and
Sparse Identification of Nonlinear Dynamics
(SINDy), have been foundational in spatial prediction
tasks related to groundwater levels.
GPR, known for its ability to model continuous
spatial relationships and estimate uncertainties, has
proven useful, although it faces computational
challenges with large datasets due to its complexity
(MacKay, 1998; Gu, 2012). SINDy, on the other
hand, is adept at capturing complex spatial dynamics
and nonlinear dependencies but is less effective for
direct value prediction (Brunton, 2015; Castro-Gama,
2022).
Ensemble methods, like Random Forest, have
been applied to model topological and flow dynamics
within water networks. These methods handle time
dependencies with fewer parameters and are effective
for capturing flows across a network’s edges, while
ML-Based Virtual Sensing for Groundwater Monitoring in the Netherlands
177

typical prediction tasks focus on node values (Sun,
2019; Ahmadi, 2019).
DL, especially models, such as Convolutional
Neural Networks (CNN), Long Short-Term Memory
(LSTM) networks, Transformer models, and Graph
Neural Networks (GNN), have significantly
advanced spatial and temporal data modelling in
water distribution networks (Paepae, 2021). GNNs,
particularly their extensions, like Graph Attention
Networks (GAT) and Temporal GNNs (T-GNNs), are
well-suited for modelling complex network structures
with nodes and edges, enabling more accurate
predictions of dynamic processes, such as water
distribution (Truong, 2024; Zhao, 2019; Veličković,
2018).
Scalability issues often arise with GNNs due to
their high computational demands and numerous
parameters (Topping, 2022; Zheng, 2024). To address
this, innovative techniques like Position Embedding
Graph Convolutional Network (PEGCN) and
Nodeformer have been developed (Chamberlain,
2021; Wu, 2022). These models handle challenges
such as over-squashing, heterophily, and long-range
dependencies by incorporating positional encoding,
making them effective for spatial interpolation tasks
like groundwater level prediction. Nodeformer uses
Transformer architectures to improve the scalability
and performance of graph-based models, although it
requires higher computational resources.
Hybrid models have also been explored, e.g.,
combining GNNs with LSTMs or CNNs, to enhance
prediction robustness by capturing dynamic temporal
and spatial changes in water levels (Lu, 2020; Nasser,
2020). Moreover, probabilistic spatio-temporal graph
models, such as DIffSTG, and attention-based
models, like spatial-temporal attention mechanisms,
have been developed to improve prediction accuracy
and reliability, surpassing traditional methods in
several aspects (Shi, 2021; Wen, 2023). These
methods are particularly useful in environmental
science, where models must capture both the spatial
and temporal dynamics of water systems.
Fast downscaling methods, such as CNN-based
approaches, have also been employed to improve data
resolution in environmental predictions. While
statistical techniques, like quantile perturbation, have
been explored, DL methods have outperformed
traditional models in capturing complex temporal
features for downscaling tasks (Tabari, 2021; Sun,
2024). These advancements demonstrate the potential
of ML models, particularly those incorporating
spatial and temporal dynamics, for more accurate
groundwater level predictions.
The growing applicability and use of ML
techniques, from classical regression to advanced
GNN architectures, continues to improve water level
prediction. PEGCN, with its positional encoding,
exemplifies these advancements, offering enhanced
spatial awareness for groundwater level prediction. A
challenges lies in integrating temporal dynamics and
refining these models for broader applicability in
water resource management.
4 INVESTIGATIVE STUDY
This study aims to estimate groundwater levels across
Schiedam, Netherlands, using real sensor data.
Schiedam’s complex clay terrain and urban
infrastructure create significant variability in
groundwater levels. The dataset, from the ARGUS
platform, includes hourly measurements from 151
sensors over 7.6 years (66,921 hours), with water
levels ranging from -2.8m to 0.3m. For efficiency, the
analysis focuses on the last 60 days of data.
ML models are used to generate virtual sensor
values, enhancing spatial coverage without the cost of
additional physical sensors. These virtual sensors
predict levels in unmonitored areas by utilising spatial
correlations from the data. The dataset pairs sensor
readings with geographic coordinates, labelling
missing or target data as ‘virtual’ to allow for model
training and accurate predictions. Schiedam’s
environment is a challenging representative test case
for virtual sensing technologies in groundwater
monitoring.
4.1 Model Implementation and Testing
The dataset includes hourly groundwater level
readings from multiple sensors, accompanied by the
geographic coordinates of each sensor. If a sensor is
missing data at certain timestamps or is flagged for
prediction, the entry is labelled as ‘virtual,’ and the
corresponding value is set to zero for prediction
purposes.
The dataset is chronologically ordered by
timestamp, with each timestamp representing a
snapshot of sensor readings. For graph-based models,
like the PEGCN, a k-nearest neighbours (kNN) graph
is constructed from these snapshots using the
Euclidean distances between sensor coordinates.
For statistical regression approaches, such as
GPR, both the sensor values and coordinates are
normalised to improve the accuracy of the model’s
predictions.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
178

4.1.1 Handling Missing Data and Virtual
Sensors
Two distinct approaches are used to handle missing
data and virtual sensors, namely dynamic graph (with
node removal) and fixed graph (with zero-filling).
Dynamic Graph Approach: Missing data is
excluded from the input, and the model generates a
regression without receiving any information about
the missing sensor. This method works best for
spatially-aware models, like GPR and PEGCN.
For GPR, the model does not rely on graph
structures and can function effectively with masked
data. In the case of PEGCN, however, removing
nodes results in the need to reconstruct a new graph
at each iteration, which can reduce the model’s ability
to maintain a constant graph structure. However, this
dynamic input graph could make the model more
adaptable when predicting new virtual sensors
without requiring a complete retraining of the model.
Fixed Graph Approach: The graph structure
remains constant and missing data is replaced with
zeros during both training and testing. The loss is
computed only between the output predictions and the
actual values of the existing sensors.
Graph-based models, like PEGCN and other
GNNs trained with this method, tend to perform
better at reconstructing the sensor network when the
virtual sensors are predetermined. However, this
approach may perform poorly when asked to predict
out-of-distribution sensors, i.e., sensors that were not
part of the initial training set.
4.1.2 Model Training and Testing
During model training, PEGCN and other GNN
algorithms randomly mask half of the sensor inputs,
setting their values to zero, while still incorporating
them into the loss function. This masking technique,
applied to batches of snapshots, enables the model to
predict missing sensor values by leveraging the
available data from other sensors. This method
enhances the model’s understanding of spatial
dependencies between sensors.
In contrast, training the GPR model involves
optimising two key hyperparameters, i.e., the
constant value and the length scale that control the
smoothness and variability of predictions. The model
is fine-tuned by minimising prediction errors, to
capture spatial correlations in the predictions.
The testing phase mirrors the training setup. For
GNN-based models like PEGCN, we reconstruct the
masked sensor values and compare them with actual
data. GPR, on the other hand, directly predicts
groundwater levels based on learned spatial
correlations. Both models are evaluated using
standard error metrics like Mean Absolute Error
(MAE) and Root Mean Square Error (RMSE).
4.2 Experimental Setup
The study is designed to evaluate the models’ ability
to learn from real sensor data and predict groundwater
levels. Two main experiments were conducted to
assess both the reconstruction of known sensors and
the prediction of virtual sensors in unmonitored areas.
The first experiment (Experiment 1) focuses on
evaluating the models’ ability to understand and
reconstruct the dynamics of the existing sensor
network. This is particularly important for DL
models, like PEGCN and GATRes, as GPR does not
require training and thus has limited capacity to
capture network dynamics.
To conduct this experiment, the dataset is divided
into two parts: The first 40 days of data are used for
training, while the last 20 days are reserved for
validation. During training, in each snapshot, half of
the sensors are randomly masked, and the models are
trained to predict the values of the masked sensors
based on the available data from the other sensors.
In the evaluation phase, the same procedure is
applied: Half of the sensors are masked, and the
model predicts the values for these masked sensors.
The predicted values are then compared to the actual
sensor readings to compute the error.
The second experiment (Experiment 2) is
designed to directly assess the models’ ability to
predict the values of virtual sensors, aligning with the
ultimate goal of creating virtual sensors to extend the
spatial coverage of the network.
One sensor is selected as the target for error
calculation, and this sensor is masked in all the
snapshots during training. The training process is
similar to Experiment 1, except the loss is computed
on all nodes apart from the chosen sensor, ensuring
that the model never receives any direct information
about the target sensor.
During evaluation, all sensor data excluding the
target sensor are fed into the model. Only the
coordinates and a value of zero are provided for the
target sensor. The model is then required to predict
the target sensor’s value, and the error is computed
based on this prediction.
In these experiments, the following models were
evaluated:
Mean Model: Used only in Experiment 1, this
simple baseline model outputs the mean value of each
sensor calculated from the training dataset. It serves
ML-Based Virtual Sensing for Groundwater Monitoring in the Netherlands
179
as a control for comparison with more complex
models.
GPR: Uses a Matérn kernel with V = 3/2, a fixed
length scale of 1, and a constant value of 5. This
version of GPR does not undergo optimisation.
GPR (Optimised): Also uses a Matern kernel
with V = 3/2, but both the length scale and constant
value are optimised to minimise prediction errors on
the training dataset.
GCN and PEGCN: Trained for 100 epochs, with
a learning rate of 0.001, weight decay of 0.0001, and
batches of 64 snapshots. The loss function is Mean
Square Error (MSE), and a kNN graph is constructed
with k = 4. For PEGCN, both a version with a
constant graph structure and one without are trained.
GATRes: Trained for 200 epochs, with a learning
rate of 0.01, weight decay of 0.00001, and batches of
64 snapshots. Like PEGCN, the loss function is MSE,
and kNN graphs are created with k = 4.
We expect GATRes, with its higher number of
parameters, will perform well in the sensor
reconstruction task, i.e., Experiment 1. However,
PEGCN and GPR may outperform GATRes in the
virtual sensor prediction task, i.e., Experiment 2, due
to their ability to capture spatial relationships and
their geographical awareness.
The models performance are gauged using MSE
as the loss function during training, MAE for
effectiveness, and RSME to measure overall
prediction accuracy.
Our evaluation extends beyond these performance
metrics to include other key factors, such as ease of
implementation, which we rate as simple, moderate,
or hard, based on the complexity of running the code
and integrating data.
We also assess resource complexity by
considering training time and prediction time. These
dimensions help illustrate the trade-offs between
model effectiveness and computational demands.
4.3 Results
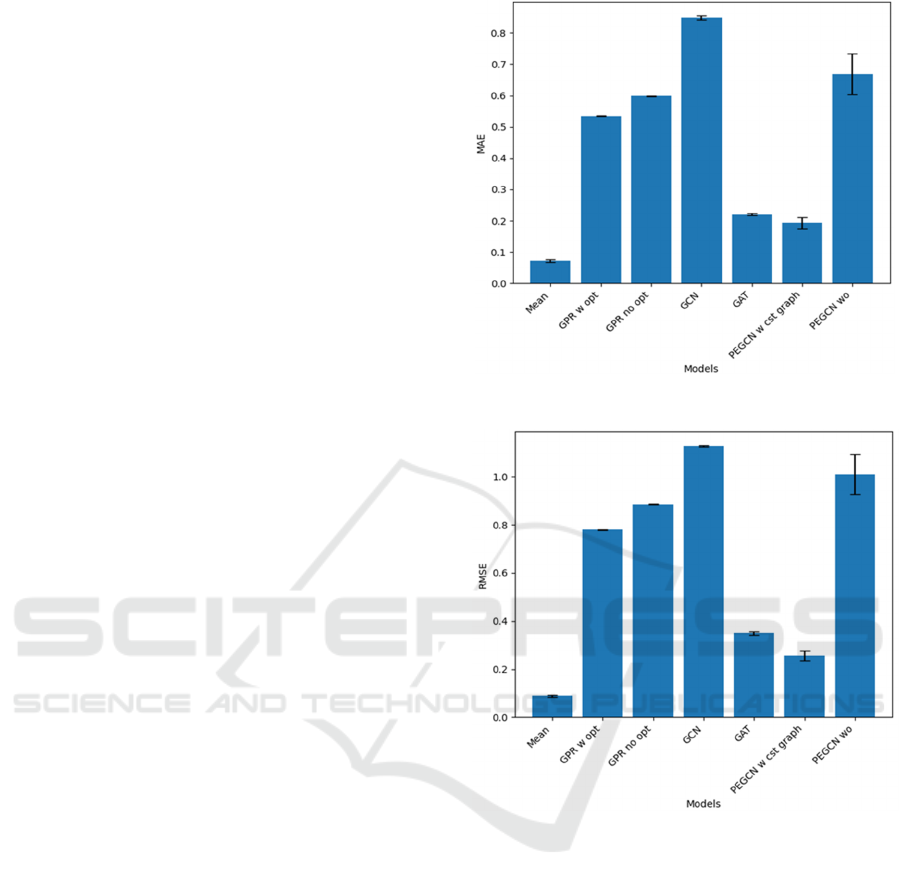
Figures 1 and 2 present the performance results for
each model in Experiment 1, showing the MAE and
RMSE, respectively. The figure shows that the simple
mean function outperformed all other models in terms
of both MAE and RMSE, which was somewhat
unexpected.
Figure 1: MAE for each model in Experiment 1.
Figure 2: RMSE for each model in Experiment 1.
This result can be attributed to the relatively stable
groundwater levels in the study area, where values do
not fluctuate significantly over time due to the
controlled nature of the environment. As a result, a
model outputting constant mean values is sufficient
for reconstructing the missing data, which explains
why the mean model performed so well in this
context.
Among the more complex models, PEGCN and
GATRes exhibited the best performance in
reconstructing the sensor network. However, they did
not outperform the mean model.
The potential for improvement lies in their ability
to learn more intricate patterns from the data.
However, the models’ difficulty in handling the
largely static nature of the groundwater data could
have hindered their performance.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
180
Adjustments such as normalising the data per
sensor or imputing missing values with the mean
instead of zeros may help reduce confusion within
these models and improve their results. PEGCN with
a constant graph structure showed better results than
the version with a dynamic graph, confirming the
importance of maintaining the network structure for
spatial data reconstruction.
Interestingly, GPR models, despite being less
complex and requiring no training, performed
surprisingly well, outperforming two of the DL
models, namely the GCN and PEGCN without a
constant graph. This suggests that GPR, with its
strong spatial correlation modelling, is able to handle
such data effectively. The model’s ability to make
accurate predictions without learning from the full
sensor network is particularly promising for virtual
sensor prediction tasks.
None of the models exceeded the mean function
in this particular case, but PEGCN and GATRes
showed potential when provided with additional
features and improved data handling methods. GPR
models’ performance demonstrates that simpler
methods may be effective when spatial correlations
are present, making them useful for tasks like virtual
sensor prediction.
Positional encoding within GCN significantly
improved its regression capabilities, even when
competing against more parameter-rich models, like
GATRes. These results highlight the need for further
refinement, particularly in handling static
environments, and suggest that GPR can serve as a
baseline for future virtual sensor prediction
experiments with an expected error of approximately
50cm.
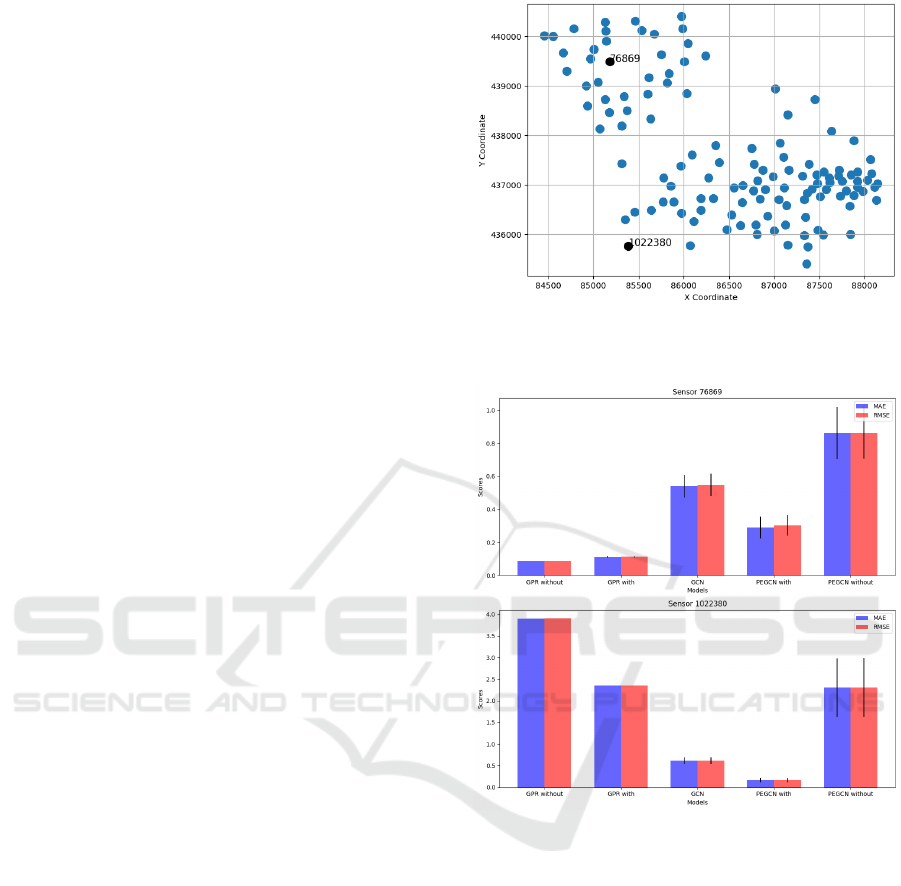
Figure 3 shows the cartesian plot of sensors
#76869 and #1022380. As you can see, these were
selected in two seemingly distinct clusters, in
respective central and peripheral positions.
In Experiment 2, the models’ performance varied
significantly depending on the sensor being predicted.
As shown in Figures 4 through 8, PEGCN generally
produced more stable results across different sensors,
with errors ranging from 20cm to 2m.
In contrast, GPR exhibited much greater
variability in its predictions. As shown in Fig. 4, GPR
performed well on sensor #76869 reaching 10cm, but
its error for sensor #1022380 reached nearly 4m.
Figure 3: Cartesian plot of sensors #76869 and #1022380
from Experiment 2.
Figure 4: MAE and RSME (in metres) for each method
and sensors #76869 (top) and #1022380 (bottom) in
Experiment 2.
This disparity can be explained by GPR’s
limitations when reconstructing sensors that are either
geographically distant from other sensors or have
values that differ greatly from their neighbours. Its
inherent spatial correlation modelling is highly
sensitive to the distance between sensors, making it
less effective in regions where the groundwater levels
fluctuate significantly across short distances or where
the data distribution is irregular.
PEGCN, with its positional encoding and graph-
based structure, appears to be better equipped to
handle such discrepancies, allowing it to maintain
more consistent performance even with sensors that
exhibit varying behaviours.
ML-Based Virtual Sensing for Groundwater Monitoring in the Netherlands
181
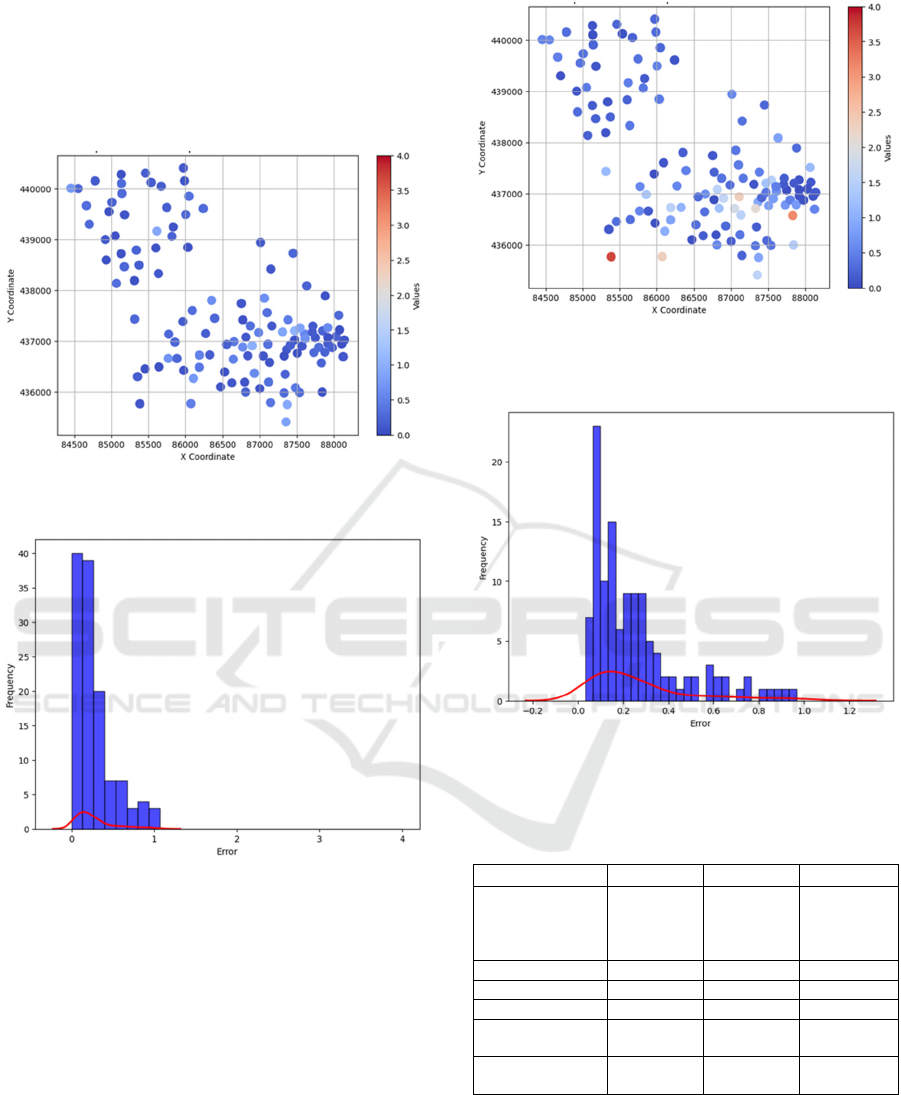
MAE error distributions shown in Fig. 8, suggests
that GPR struggles with outliers, especially in cases
where the sensor’s value is far from its neighbouring
sensors. This indicates that GPR’s interpolation
capabilities are less robust in areas with extreme
values or isolated sensors.
Figure 5: MAE PEGCN per-sensor performance (in metres)
in Experiment 2 (RMSE not shown due to similar values).
Figure 6: MAE distribution PEGCN performance (in
metres) in Experiment 2 (RMSE not shown due to similar
values).
On the other hand, PEGCN’s stability across the
sensor network demonstrates the advantage of
maintaining a graph structure that captures
geographic relationships more accurately.
Experimenting with kernel functions and
hyperparameters could potentially improve GPR’s
performance, particularly in areas with highly
variable levels. However, GPR seems less suited for
environments where significant differences exist
between nearby sensors.
Figure 7: MAE GPR (without optimisation) per-sensor
performance (in metres) in Experiment 2 (RMSE not shown
due to similar values).
Figure 8: MAE distribution GPR (without optimisation)
performance (in metres) in Experiment 2 (RMSE not shown
due to similar values).
Table 1: Other factors results for GPR, PEGCN, and GCN.
Factor GPR PEGCN GCN
Prediction
Snapshot
0.03s
Dataset
22.32s
Snapshot
0.35s
Dataset
59.52s
Snapshot
0.34
Dataset
56.94s
Training 10:42.4 01:37.0 00:53.6
D
evice CPU GPU GPU
No. parameters 2 6521 1153
Ease of
implementation
Simple Moderate Moderate
Time to
completion
Day Week Week
While PEGCN exhibits better stability and
performance for virtual sensor prediction in areas
with complex sensor networks, GPR still provides a
valuable baseline with reasonable accuracy,
especially when spatial relationships are consistent.
However, both models could benefit from further
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
182

optimisation and testing in different environments to
fully understand their capabilities and limitations.
Beyond performance metrics such as prediction
accuracy, other important factors must be considered
when comparing models. Specifically, ease of
implementation and resource complexity, are among
those reported in Table 1. These aspects can
significantly impact the practicality of a model for
real-world applications.
Among the models, GPR stands out for its
simplicity. GPR is relatively easy to implement, as it
does not require extensive training, and its
performance remains stable with well-chosen initial
parameters. This makes GPR an ideal choice for
applications where ease of use and minimal
computational overhead are priorities. Additionally,
GPR runs efficiently on standard CPUs, making it
accessible for smaller datasets or less resource-
intensive tasks.
However, one major limitation is its scalability.
As the number of sensors increases, GPR’s
computational complexity grows cubically, which
can lead to performance bottlenecks with larger
datasets.
In contrast, PEGCN and GCN are more
challenging to implement. They require a solid
understanding of graph-based neural networks and
experience with libraries, like PyTorch Geometric.
Setting up these models involves more intricate input
preparation and parameter tuning, particularly for the
graph structure and embeddings. Moreover, these
models perform best on GPUs, meaning access to
high-performance hardware is crucial for their
implementation and training, especially when dealing
with larger datasets.
During the study, Nodeformer was also explored
as a potential model. However, it was ultimately
unsuccessful in our case, highlighting the difficulty of
adapting advanced DL models to specific tasks. This
illustrates the inherent challenge in implementing
cutting-edge models, which may not always be ready
for practical applications without significant
customisation.
Table 1 also provides an overview of the resource
demands of each model in terms of prediction time,
training time, and ease of implementation. It reveals
that GPR is the most resource-efficient, with a
prediction time of just 0.021965s per snapshot and no
need for training on large datasets.
PEGCN and GCN are significantly more
demanding, with training times for the whole dataset
reaching over an hour and requiring substantial GPU
resources. Additionally, GATRes and Nodeformer
were not fully implemented due to their high
complexity, suggesting that these models may not be
easily used in environments where computational
resources are limited.
As the table shows, GPR is the fastest and
simplest to implement, making it ideal for small-scale
applications with minimal training requirements.
However, PEGCN performs better in terms of
accuracy and stability for virtual sensor
reconstruction tasks, although it demands more data,
training time, and computational resources. The need
to retrain PEGCN whenever new virtual sensors are
added increases its complexity, both in terms of data
management and coding effort.
5 CONCLUSION
A key takeaway is the importance of comparing
available ML models based on their performance, as
well as on their suitability for practical applications.
We investigated models like GPR, PEGCN, and GCN
for groundwater level monitoring, with a focus on
real-world implementation and usability. This focus
is particularly crucial because the eventual users of
such solutions may not be experts in ML, and the
system should be accessible and manageable without
deep technical expertise needed.
Model selection plays a key role, with GPR being
ideal for users needing a simple, efficient solution. Its
ease of use, minimal computational needs, and no
requirement for retraining make it suitable for stable
groundwater conditions and smaller datasets,
particularly for non-expert users.
In contrast, complex models like PEGCN offer
better accuracy in handling spatial variability but
require significant resources, technical expertise, and
access to advanced hardware like GPUs, making
them challenging for non-expert users.
Even for experienced practitioners, implementing
advanced models like PEGCN, GATRes, or
Nodeformer is challenging due to real-world
obstacles, like data cleaning and handling missing
values. Moving from theoretical model performance
to practical deployment often involves additional
customisation and tuning, demanding substantial
computational power. Thus, balancing model
performance with usability remains complex, even
for technical users.
This paper considers ML models, GPR and
PEGCN, for estimating groundwater levels in The
Netherlands, using data from the Schiedam area. We
investigate their performance in monitored and
unmonitored areas, considering accuracy, ease of use,
and computational requirements, as well.
ML-Based Virtual Sensing for Groundwater Monitoring in the Netherlands
183

GPR delivered reliable predictions with minimal
training, but struggled in regions with significant
groundwater variation. PEGCN better captured
spatial relationships but demanded more
computational power and retraining when adding
virtual sensors. But the choice of model also depends
on operational needs. GPR is suited for simpler
applications, while PEGCN excels in more complex
environments requiring higher precision.
Promising advancements in ML-based virtual
sensing for groundwater monitoring include
integrating positional encoding into models like
GATRes to improve spatial awareness and model
complex terrain dependencies. Incorporating
temporal features can better capture seasonal
fluctuations, enhancing long-term predictions.
Expanding data sources, such as soil composition and
weather forecasts, can further boost accuracy across
regions. Developing methods to estimate prediction
error in sensor-free areas could help optimise sensor
placement and improving uncertainty quantification,
increasing trust in ML-driven predictions.
REFERENCES
Ahmadi, A., Olyaei, M., Heydari, Z., Emami, M.,
Zeynolabedin, A., Ghomlaghi, A., Daccache, A., Fogg,
G. E., Sadegh, M. (2022). Groundwater Level
Modeling with Machine Learning: A Systematic
Review and Meta-Analysis. Water, 14, 949.
Brunton, S. L., Proctor, J. L., Kutz, J. N. (2015).
Discovering governing equations from data: Sparse
identification of nonlinear dynamical systems.
Castro-Gama, M. (2022). On the use of SINDY for WDN.
In: Proceedings of the 2nd International Joint Conference
on Water Distribution Systems Analysis & Computing
and Control in the Water Industry (WDSA/CCWI),
Universitat Politècnica de València, Spain.
Chamberlain, B., Rowbottom, J., Gorinova, M. I.,
Bronstein, M., Webb, S., Rossi, E. (2021). GRAND:
Graph Neural Diffusion. In: Proceedings of the 38th
International Conference on Machine Learning, 139.
Fetter, C. W. (2018). Applied Hydrogeology (4th ed.).
Pearson.
Gu, D., Hu, H. (2012). Spatial Gaussian Process Regression
With Mobile Sensor Networks. IEEE Transactions on
Neural Networks and Learning Systems, 23.
Hamilton, W. L. (2020). Graph Representation Learning.
M&C Publishers.
Lu, Z., Lv, W., Cao, Y., Xie, Z., Peng, H., Du, B. (2020).
LSTM variants meet graph neural networks for road
speed prediction. Neurocomputing, 400.
MacKay, D. J. C. (1998). Introduction to Gaussian
processes.
Nasser, A. A., Rashad, M. Z., Hussein, S. E. (2020). A Two-
Layer Water Demand Prediction System in Urban
Areas Based on Micro-Services and LSTM Neural
Networks. IEEE Access, 8.
Paepae, T., Bokoro, P. N., Kyamakya, K. (2021). From
Fully Physical to Virtual Sensing for Water Quality
Assessment: A Comprehensive Review of the Relevant
State-of-the-Art. Sensors, 21, 6971.
Rasmussen, C. E., Williams, C. K. I. (2006). Gaussian
Processes for Machine Learning. MIT Press.
Rothman, D. (2021). Transformers for Natural Language
Processing. Packt Publishing.
Shi, X., Qi, H., Shen, Y., Wu, G., Yin, B. (2021). A Spatial–
Temporal Attention Approach for Traffic Prediction.
Intelligent Transportation Systems, 22. IEEE.
Sun, A. Y., Scanlon, B. R. (2019). How can Big Data and
machine learning benefit environment and water
management: a survey of methods, applications, and
future directions. Environmental Research Letters, 14,
073001.
Sun, Y., Deng, K., Ren, K., Liu, J., Deng, C., Jin, Y. (2024).
Deep learning in statistical downscaling for deriving
high spatial resolution gridded meteorological data: A
systematic review. ISPRS Journal of Photogrammetry
and Remote Sensing, 208, 14–38.
Tabari, H., Paz, S. M., Buekenhout, D., Willems, P. (2021).
Comparison of statistical downscaling methods for
climate change impact analysis on precipitation-driven
drought. Hydrology and Earth System Sciences, 25,
3493–3517.
Topping, J., Di Giovanni, F., Chamberlain, B. P., Dong, X.,
Bronstein, M. M. (2022). Understanding over-
squashing and bottlenecks on graphs via curvature.
Truong, H., Tello, A., Lazovik, A., Degeler, V. (2024).
Graph Neural Networks for Pressure Estimation in
Water Distribution Systems. Water Resources
Research.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, Ł., Polosukhin, I. (2017).
Attention is All You Need. In: Proceedings of Advances
in Neural Information Processing Systems, 30.
Veličković, P., Cucurull, G., Casanova, A., Romero, A.,
Liò, P., Bengio, Y. (2018). Graph Attention Networks.
In: Proceedings of the International Conference on
Learning Representations (ICLR).
Wen, H., Lin, Y., Xia, Y., Wan, H., Wen, Q., Zimmermann,
R., Liang, Y. (2023). DiffSTG: Probabilistic Spatio-
Temporal Graph Forecasting with Denoising Diffusion
Models. In: Proceedings of the 31st ACM
SIGSPATIAL International Conference on Advances
in Geographic Information Systems.
Wu, Q., Zhao, W., Li, Z., Wipf, D., Yan, J. (2022).
NodeFormer: A Scalable Graph Structure Learning
Transformer for Node Classification.
Zhao, L., Song, Y., Zhang, C., Liu, Y., Wang, P., Lin, T.,
Deng, M., Li, H. (2019). T-GCN: A Temporal Graph
Convolutional Network for Traffic Prediction. IEEE
Transactions on Intelligent Transportation Systems.
Zheng, X., Wang, Y., Liu, Y., Li, M., Zhang, M., Jin, D.,
Yu, P. S., Pan, S. (2024). Graph Neural Networks for
Graphs with Heterophily: A Survey.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
184
