
Distortion-Aware Adversarial Attacks on Bounding Boxes of Object
Detectors
Pham Phuc
1
, Son Vuong
2,3
, Khang Nguyen
4
and Tuan Dang
4
1
Ho Chi Minh City University of Technology, Vietnam
2
VinBigData, Vietnam
3
VNU University of Engineering and Technology, Vietnam
4
University of Texas at Arlington, U.S.A.
Keywords:
Adversarial Attacks, Object Detection, Model Vulnerability.
Abstract:
Deep learning-based object detection has become ubiquitous in the last decade due to its high accuracy in
many real-world applications. With this growing trend, these models are interested in being attacked by
adversaries, with most of the results being on classifiers, which do not match the context of practical object
detection. In this work, we propose a novel method to fool object detectors, expose the vulnerability of state-
of-the-art detectors, and promote later works to build more robust detectors to adversarial examples. Our
method aims to generate adversarial images by perturbing object confidence scores during training, which
is crucial in predicting confidence for each class in the testing phase. Herein, we provide a more intuitive
technique to embed additive noises based on detected objects’ masks and the training loss with distortion
control over the original image by leveraging the gradient of iterative images. To verify the proposed method,
we perform adversarial attacks against different object detectors, including the most recent state-of-the-art
models like YOLOv8, Faster R-CNN, RetinaNet, and Swin Transformer. We also evaluate our technique on
MS COCO 2017 and PASCAL VOC 2012 datasets and analyze the trade-off between success attack rate and
image distortion. Our experiments show that the achievable success attack rate is up to 100% and up to 98%
when performing white-box and black-box attacks, respectively. The source code and relevant documentation
for this work are available at the following link https://github.com/anonymous20210106/attack detector.git.
1 INTRODUCTION
Neural network-based detectors play significant roles
in many crucial downstream tasks, such as 3D depth
estimations (Dang et al., 2023), 3D point cloud regis-
tration (Nguyen et al., 2024a), semantic scene under-
standing (Nguyen et al., 2024b), and visual SLAM
(Dang et al., 2024). However, neural networks are
proven to be vulnerable to adversarial attacks, espe-
cially for vision-based tasks. Starting from image
classification, prior works (Goodfellow et al., 2015;
Madry et al., 2018; Moosavi-Dezfooli et al., 2016)
try to attack classification models systematically. Fast
Gradient Sign Method (FGSM) (Goodfellow et al.,
2015) and Projected Gradient Descent (PGD) (Madry
et al., 2018) leverage gradients of the loss function to
add a minimal perturbation and find the direction to
move from the current class to the targeted class. In
this realm, DeepFool (Moosavi-Dezfooli et al., 2016)
formed this as an optimization problem to find both
minimal distances and optimal direction by approxi-
mating a non-linear classification using the first order
of Taylor expansion and Lagrange multiplier. Besides
gradient-based approaches, (Alaifari et al., 2018) gen-
erated adversarial images by optimizing deformable
perturbation using vector fields of the original one.
Although adversarial attacks gain more attention and
effort from researchers, crafting theories and practical
implementation for this problem on object detectors
are not well-explored compared to itself on classifica-
tion tasks.
Motivated by adversarial attacks for classification,
recent works (Song et al., 2018; Lu et al., 2017;
Im Choi and Tian, 2022; Xie et al., 2017) attempt to
perturb image detectors. Patch-based approach (Lu
et al., 2017; Song et al., 2018; Liu et al., 2019; Du
et al., 2022) adds random patches or human design
patches into original images; these methods are re-
ported to be effective in fooling the detectors, but
the patches are apparently visible to the human eyes.
Phuc, P., Vuong, S., Nguyen, K. and Dang, T.
Distortion-Aware Adversarial Attacks on Bounding Boxes of Object Detectors.
DOI: 10.5220/0013101900003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 2: VISAPP, pages
27-38
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
27

Original
Sequence
Perturbed
Sequence
Disabled
Camera
Surveillance
Camera
Server
Added Distortion
Adversarial
Attack
Figure 1: The adversarial attack on bounding boxes of object detectors with distortion awareness can perturb a sequence
of images taken from a surveillance camera with a controllable added amount of distortion to obtain a certain success attack
rate (Sec. 3 and Sec. 4), making the object detector disabled. The demonstration video of the illustrated sequence with more
examples is available at YouTube.
Dense Adversary Generation (DAG) (Xie et al., 2017)
considers fooling detectors as a fooling classifier for
proposed bounding boxes: perturbing labels in each
proposed bounding box to make the detector predict
a different label other than the true one. Meanwhile,
another method (Im Choi and Tian, 2022) focuses on
attacking location, objectness, or class confidence of
YOLOv4 (Bochkovskiy et al., 2020) by noising the
vehicle-related image using FGSM and PGD meth-
ods. However, this technique lacks the knowledge
of individual bounding boxes, resulting in inaccurate
added noises in multi-object images. Furthermore,
the quality of adversarial images is not well-studied
and is often disregarded in previous works due to their
prioritization of attacking methods’ effectiveness.
Indeed, perturbing object detectors is far more
challenging since the network abstracts location re-
gression and object confidence, and loss functions are
often multi-task learning. Self-exploring images and
finding the best perturbation like (Moosavi-Dezfooli
et al., 2016; Alaifari et al., 2018) for detectors be-
come exhausting because of multi-task learning. As
learning to detect objects in images heavily depends
on the objective functions or loss functions, the ob-
jective of training detectors is to minimize and con-
verge these losses. Thus, one way to attack detec-
tors is to increase losses for training samples to a
certain level so that detectors misdetect or no longer
recognize any objects. Through this observation, our
approach is to find the optimal direction and distor-
tion amount added to the targeted pixels with respect
to these losses. Fig.1 demonstrates the practical ap-
plication of our distortion-aware adversarial attack
technique in real-world surveillance scenarios. The
method introduces adversarial perturbations that can-
not be recognized by humans but effectively disable
object detection systems. It maintains a balance be-
tween preserving image quality and achieving high
attack success rates, making it flexible across various
practical situations. The unnoticeable nature of these
distortions is crucial for adversarial use cases, as they
remain visually undetectable while exploiting weak-
nesses in modern object detection models. This com-
bination of stealth and effectiveness highlights the ro-
bustness of our approach.
To implement our method, we leverage the gradi-
ent from the loss function, like FGSM. While FGSM
adds the exact amount of noise to every pixel except
ones that do not change their direction, our approach
uses magnitude from the gradient to generate optimal
perturbations to all targeted pixels. As detectors pro-
pose bounding boxes and predict if objects are present
in such regions before predicting which classes they
belong to, object confidence plays an essential role
in the detection task. We, therefore, inclusively use
these losses and further sampling with a recursive gra-
dient to take advantage of valuable information from
all losses. We also find optimal perturbation amount
iteratively as iterative methods produce better results
than the fast methods.
In this work, our contributions are summarized as
follows: (1) formalize a distortion-aware adversar-
ial attack technique on object detectors, (2) propose
a novel approach to attack state-of-the-art detectors
with different network architectures and detection al-
gorithms (Ren et al., 2015; Lin et al., 2017; Liu et al.,
2021; Jocher et al., 2023), and (3) analyze and ex-
periment our proposed technique on MS COCO 2017
(Lin et al., 2014) and PASCAL VOC 2012 (Evering-
ham et al., 2015) datasets with cross-model transfer-
ability and cross-domain datasets validation. Our key
properties compared to previous methods (Xie et al.,
2017; Wei et al., 2019) are also shown in Tab.1.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
28

Table 1: Comparisons between our method and previous
methods, including DAG (Xie et al., 2017) and Unified and
Efficient Adversary (UEA) (Wei et al., 2019), in terms of
key properties.
DAG UEA Ours
iterative added noises ✓ ✗ ✓
mostly imperceptible to human eyes ✓ ✓ ✓
distortion awareness ✗ ✗ ✓
stable transferability to backbones ✗ ✗ ✓
consistent with detection algorithms ✗ ✗ ✓
2 RELATED WORK
Adversarial Attacks on Object Detectors. Previous
works in adversarial attacks on object detection can
be categorized into optimization problems and Gen-
erative Adversarial Networks (GAN). The optimiza-
tion problem is finding the adversarial images that sat-
isfy the objective functions, while GAN generates ad-
versarial images by training a generator that focuses
on a classification or regression of the target network
(Wei et al., 2019). Other methods use patches to fool
the detectors (Song et al., 2018; Du et al., 2022), but
noises are visible from a human perspective. We con-
sider the adversarial attack as an optimization prob-
lem. Our method is conceptually similar to DAG (Xie
et al., 2017), but we more focus on finding the op-
timal direction and amplitude for each pixel to per-
turb given bounding boxes rather than drifting from
one true class to another while proposing bounding
boxes, which is impractical when class labels are un-
known, especially in black-box attacks. Furthermore,
we demonstrate the effectiveness of our methods on
both one-stage and two-stage detectors.
Iterative Generative of Adversarial Images. In-
spired by the earliest study on classification problems
(Goodfellow et al., 2015), the work (Kurakin et al.,
2018) shows the effectiveness of iterative methods
over one-shot methods by using the least-likely class
method with FGSM to generate adversarial images
for classification tasks. Another work (Alaifari et al.,
2018) iteratively adds small deformation constructed
by vector fields into images while DAG (Xie et al.,
2017) performs iterative gradient back-propagation
on adversarial labels for each target. Our method
also uses iterative methods; however, differs from the
mentioned methods: we calculate the gradient over
the iteratively permuted images and optimize this gra-
dient under image distortion control. Moreover, we
also focus on attacking general image detectors at dif-
ferent network architectures and detection methods,
while (Goodfellow et al., 2015; Kurakin et al., 2018;
Figure 2: Illustration of adversarial attack with decision
boundaries formed by k discriminant functions: attackers
are looking for alternative x that is similar to x
0
such that
g
i
(x) < g
t
(x
0
) for i = 1, 2, .., k and t ̸= i so that the model f
classify x as t. Untargeted attack is seeking x such that the
model, f , classifies x as all C
j
where i ̸= j. In this example,
t = 5 and i = 3
Alaifari et al., 2018) focus on attacking classifiers.
Image Distortion Measurement. Prior works (Ku-
rakin et al., 2018; Carlini and Wagner, 2017; Chen
et al., 2018) used l
∞
to measure the similarity between
images original and adversarial images. l
∞
effectively
associates the corresponding features between pairs
of images under changes, such as shifting or rota-
tions (Wang et al., 2004; Lindeberg, 2012; Rublee
et al., 2011). Regardless, as l
∞
focuses on a per-pixel
level, it lacks the illustration of how changes in a pixel
might affect its neighboring pixels or might impact
the overall pattern of the distorted image (Puccetti
et al., 2023). Other methods, such as mean square
error (MSE), peak signal-to-noise ratio (PSNR), and
contrast-to-noise ratio (CNR) are less sensitive to the
human visual system (Lu, 2019). Therefore, we select
Normalize Cross Correlation, which is robust to vari-
ous image scales and less computational than Struc-
tural Similarity (SSIM) (Wang et al., 2004) while
maintaining the distortion imperceptibility to human
perception.
3 FORMULATION
This section formalizes the attack strategy through
key equations, including perturbation minimization
(Eq.1), discriminant functions (Eq.3), and optimiza-
tion objectives (Eq.6).
3.1 Adversarial Attacks on Object
Detectors
Defintion. Let I be an RGB image of size of m ×
n × 3 with objects, o
1
, o
2
, ..., o
k
, belonging to classes,
c
1
, c
2
, ..., c
k
. Similarly, the perturbed image is de-
noted as I
′
but with the corresponding classes are now
c
′
1
, c
′
2
, ..., c
′
k
, where {c
1
, c
2
, ..., c
k
} ̸= {c
′
1
, c
′
2
, ..., c
′
k
}.
Distortion-Aware Adversarial Attacks on Bounding Boxes of Object Detectors
29

Therefore, our objective is to identify an algorithm
such that the difference between I and I
′
is mini-
mized, so that I
′
can still perturb the detector, f , to
misdetect objects but is mostly imperceptible to hu-
man eyes. The procedure, with ε as the distortion
(perturbation) amount, is written as:
minimize
ε
||I − I
′
||, with ε = I
′
− I (1)
Discriminants for Classifiers. The decision bound-
aries between a k-class-classifier are formed by k dis-
criminant functions, g
i
(·), with i = 1, 2, ..., k, as illus-
trated in Fig.2a. Also, for untargeted attacks, misde-
tecting a particular object in I
′
requires moving f (o
i
)
into a class other than its true class, c
′
i
, as shown in
Fig.2b. Thus, the domain, Ω
i
, that f (o
i
) results in c
′
i
is defined as follows:
Ω
i
:
=
o
i
| g
i
(o
i
) − min
j̸=i
{g
j
(o
i
)} ≤ 0
(2)
Discriminants for Object Detectors. Moreover, in
the scope of object detection, accurate detections
mainly rely on the class confidence scores of objects
in bounding boxes after non-max suppression. There-
fore, the class confidence score should be inferred to
be less than the confidence threshold for the detector
to misdetect classes of objects in the bounding boxes.
Reforming Eq.2, we obtain:
Ω
i
:
=
o
i
| p(c
i
) − min
j̸=i
{p(c
j
)} ≤ T
(3)
for b
i
∈ {b
1
, ..., b
k
} and {b
1
, ..., b
k
} ∼ {o
1
, ..., o
k
}
with ∼ represents the element-wise corresponding
notation, {b
1
, b
2
, ..., b
k
} indicate the detected boxes in
I , T is the pre-defined confidence threshold, and p(·)
represents the class probability function.
3.2 Perturbing to Change Class
Confidence Scores
Class Confidence Score. To change the class confi-
dence score of an object in a bounding box, we per-
turb its likelihood, Pr(c
i
| o
i
), to bring p(c
i
) to be
lower than the class probability, p(c
j
), and the like-
lihood of another class, Pr(c
j
| o
i
), as formalized as
follows:
p(c
i
) = Pr(c
i
| o
i
) · Pr(o
i
)
< Pr(c
j
| o
i
) · Pr(o
i
) = p(c
j
)
(4)
In short, to do this, the adversarial distortions
should be added in each proposed bounding box.
Therefore, based on Eq.4 and Pr(o
i
) ≥ 0 meaning that
there is a chance that the object is presented in the
bounding box, Eq.3 therefore can be rewritten into:
Ω
i
:
=
o
i
| Pr(c
i
| o
i
) − min
j̸=i
{Pr(c
j
| o
i
)} ≤ T
(5)
Objective Function for Object Detection. Combin-
ing Eq.1 and Eq.5, the generalized optimization gen-
erating an adversarial image that perturbs f to misde-
tect o
i
in b
i
within I is defined as follows:
(6)minimize
ε
||I − I
′
|| such that Ω
i
≤ T
3.3 Perturbing Through Detector Loss
Detector Loss: Most commonly-used object detec-
tors return predicted classes with their corresponding
bounding box coordinates and confidence scores. In
which, the loss function, L, is the sum of classifica-
tion loss, L
cls
, localization loss, L
loc
, and confidence
loss, L
ob j
, as below:
L = L
loc
+ L
ob j
+ L
cls
(7)
Perturbing through Detector Loss. Based on Eq.7,
to desired target pixels to perturb in an image, we add
the amount of distortion as follows:
∂L
∂I
· M[ f (I )] (8)
where M represents all masks predicted by f on I ,
which is the sum of bounding boxes on an m-by-n
zeroes array, and ∂ indicates the partial derivative no-
tation.
Therefore, to perturb the classes’ probabilities of
an object in a bounding box, we can instead modu-
late it through the definition in Eq.8, which effectively
fools the object detectors during the inference stage.
The involvement of Eq.8 is shown in Eq.9 (Sec.4.1).
4 METHOD
In this section, we propose the white-box attack algo-
rithm (Sec.4.3) to find the most appropriate distortion
amount, ε, via generating adversarial images, I
′
, iter-
atively (Sec.4.1) with distortion awareness (Sec.4.2).
4.1 Iterative Adversarial Images
With the assumption that the object detector’s net-
work architecture is known, our proposed method
leverages the gradient of how pixels of predicted ob-
jects change when I passes through the network. In
specific, we find the gradient ascent of targeted pix-
els to convert the original image, I , to an adversarial
image, I
′
.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
30

Generating Iterative Adversarial Images. How-
ever, the gradient derived from the total loss (Eq.7)
also gives the gradient of non-interested regions;
meanwhile, we need to navigate the adversarial im-
age to follow the gradient on specific bounding boxes.
Using Eq.8, we search for the adversarial image with
respect to the gradient ascent of targeted pixels as fol-
lows:
I
′
i
= I
′
i−1
+ ε = I
′
i−1
+ λ ·
∂L
∂I
′
i−1
· M
h
f (I
′
i−1
)
i
(9)
with M
h
f (I
′
i−1
)
i
= 0
m×n
+
k
∑
i=1
b
i
and I
′
0
= I
where the subscripts, i and i − 1, denote current and
previous iterations, respectively, + sign denotes the
gradient direction (ascending), and λ is the gradient
ascent’s step size.
Distortion as Control Parameter. Iterating Eq.9
over a considerable iterations, the generated adversar-
ial image, I
′
, might get over-noised, which dissatis-
fies Eq.1 and eventually Eq.6 regarding minimizing ε.
Therefore, we introduce two strategies to control the
distorted images:
I
′
=
(
I
′
i
, if D(I , I
′
i
) ≥ S or f (I
′
i
) ≥ R
I
′
i+1
, otherwise (using Eq.9)
(10)
where D(I , I
′
i
) computes the distortion amount, ε,
between I and I
′
i
as subsequently defined in Eq.12
(Sec.4.2), and S and R are the target distortion
amount and the desired success attack rate, respec-
tively, which are variants of T .
Differences of Proposed Strategies. Both condi-
tional statements of Eq.10 eventually help Eq.9 to
find the smallest iteration without brute-forcing over
a larger iteration. Yet, the main difference between
these equations is that D(·, ·) ≥ S focuses on adding
a desired distortion in the original image. Meanwhile,
f (·) ≥ R concentrates on the desired success attack
rate. Eq.9 is the extended version applied for detec-
tors derived from (Kurakin et al., 2018).
4.2 Normalized Cross Correlation
As Normalized Cross Correlation (NCC) depicts
abrupt changes of targeted pixels to the average value
of all image pixels while computing the similarity be-
tween two input images, we use NCC for our work, as
shown in Eq.11.
NCC(I , I
′
) =
∑
n
i=1
I
(i)
− I
I
′
(i)
− I
′
r
∑
n
i=1
I
(i)
− I
2
r
∑
n
i=1
I
′
(i)
− I
′
2
(11)
Algorithm 1: Adversarial Images Iterative Generation.
Input : I
:
= raw image, λ
:
= step size
f
:
= detection model, N
:
= max iteration
T = {S | R }
:
= control param
Output: I
′
:
= adversarial image
1 function generator(I,λ, f , N, {S | R })
2 i = 0, I
′
i
= I
3 {b
1
, b
2
, ..., b
k
} = B [ f (I )]
4 while i < N and {b
1
, b
2
, ..., b
k
} ̸=
/
0 do
5 M = 0
m×n
6 {b
′
1
, b
′
2
, ..., b
′
k
} = B
h
f (I
′
i
)
i
7 for b
′
j
∈ {b
′
1
, b
′
2
, ..., b
′
k
} do
8 if D(I , I
′
i
) ≥ S or f (I
′
i
) ≥ R then
9 break
10 M ← M + b
′
j
11 I
i+1
= I
i
+ λ ·
∂L
∂I
′
i
· M
h
f (I
′
i
)
i
(Eq.9)
12 i ← i + 1
13 I
′
= I
′
i
14 return I
′
with n is the number of pixels in I and I
′
, I
(i)
in-
dicates the i
th
pixel of I , and I represents the mean
value of I .
Since NCC(I , I
′
) ∈ [0, 1] measures the similarity
score between I and I
′
, we define the distortion met-
ric (dissimilarity), D, as the complement of NCC in 1,
as follows:
D(I , I
′
) = 1 − NCC(I , I
′
) (12)
4.3 Algorithm
As illustrated in Alg.1, the algorithm first takes the
bounding boxes that predicted objects provided by
f on a raw image I . Hence, the adversarial image
generation takes place iteratively until the predefined
maximum iteration, M, is reached or no bounding
boxes on I
′
i
are detected by f . As the bounding boxes
are re-predicted in each iteration, ε is added based on
the change of L with respect to the pixel’s gradient
ascent of I
′
i
. Using on Eq.9, ε is only added on the
aggregated masks, M
h
f (I
′
i
)
i
, of the bounding boxes.
To better control either ε to be added or the success
attack rate, R , we also check if D(I , I
′
i
) or f (I
′
i
) ex-
ceeds the predefined threshold (Eq.10) to maintain the
adversarial image to be adequately controlled; other-
wise, ε are kept adding in the next iteration. Note that
the conditional statements in Alg.1 can be used inde-
pendently, which either controls R or S . The analyses
on control of R and S with respect to I
′
i
are further
provided in Sec.5.
Distortion-Aware Adversarial Attacks on Bounding Boxes of Object Detectors
31
5 ANALYSES
To verify our proposed method’s attacking feasibil-
ity, we analyze it with a subset of images on the most
recent state-of-the-art detection models (YOLOv8 –
with various sizes).
5.1 Convergence of Losses
The total loss consistently converges as adversarial
images are iteratively generated, as shown in Fig.3.
To validate this behavior, we conducted extensive
testing on numerous images from the MS COCO
2017 dataset, confirming that the convergence trend is
consistent across the entire dataset. For visualization
purposes, we randomly selected three representative
images to illustrate this trend. Through our experi-
ments, we found that 120 iterations strike an optimal
balance between computational efficiency and attack
performance, allowing sufficient time for the total loss
to converge. This iteration count ensures that the re-
sults are representative and practical for real-world
applications.
This also shows that Alg.1 can find adversarial im-
ages that can fool the object detectors. Also, the dis-
tortions of the adversarial images become larger as
the iterations increase. Therefore, if we pick a recur-
sively adversarial image before the convergence, we
get a less-distorted image but eventually sacrifice the
effectiveness of our attack.
0 20 40 60 80 100 120
Iteration
0
5
10
15
20
Loss
000000156292.jpg
000000005193.jpg
000000004134.jpg
Figure 3: The convergence of loss over 120 iterations on a
subset of images from the MS COCO 2017 dataset.
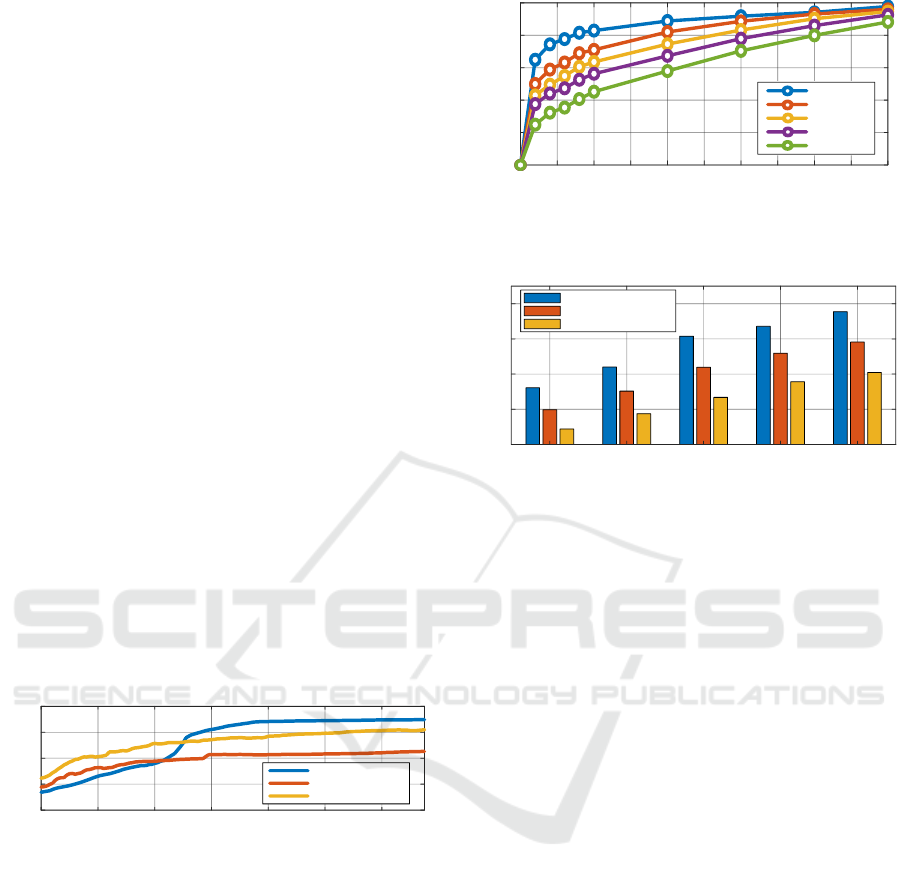
5.2 Image Distortion for Difference
Models with Confidence Thresholds
and Success Rate
Success Rates. Fig.4 shows that YOLOv8n is the
most vulnerable model with the least distorted image.
In contrast, YOLOv8x is the hardest to attack, and its
adversarial images are the most distorted compared
to other models. Indeed, we can achieve a success at-
tack rate of more than 80% if image distortion is set
by 10%. However, if the distortion rate increases from
10%, the attacking rate increases slowly. Overall, we
can obtain a decent attacking rate by distorting only
parts of images.
0 5 10 15 20 25 30 35 40 45 50
Distortion (%)
20
40
60
80
100
Success Rate
(%)
YOLOv8n
YOLOv8s
YOLOv8m
YOLOv8l
YOLOv8x
Figure 4: Relationship between attacking rate and target
distortion on detection models set with confidence thresh-
olds of 0.75.
YOLOv8n YOLOv8s YOLOv8m YOLOv8l YOLOv8x
0
10
20
30
40
Distortion
(%)
Conf. Threshold of 0.25
Conf. Threshold of 0.50
Conf. Threshold of 0.75
Figure 5: Relationship between confidence score and dis-
tortion at a success attack rate of 97% on various-sized
YOLOv8 models.
Confidence Scores. We also evaluate Alg.1 to see
how average image distortion changes for each model
when obtaining a desired attacking rate. Fig.5 depicts
that attacking models with lower confidence scores
causes the original images to be distorted more than
the same model set with higher confidence scores.
5.3 Distortion Amount and Number of
Iterations to Fool Different-Sized
Models
Distortion Amount. The bottom row of Fig.9 shows
the added distortion amounts (top row) to generate
the adversarial images (middle row) among various-
sized models. We notice that, for larger-sized mod-
els, our method tends to add more noise to prevent
these models from extracting the objects’ features and
thereafter recognizing them, and vice versa. In this
case, the features of the bear are perturbed. Another
noticeable point is that the added distortion amount
becomes more visible to human eyes when fooling
the large-sized models, as depicted in the adversar-
ial images and the heatmaps in the last two columns
of Fig.9.
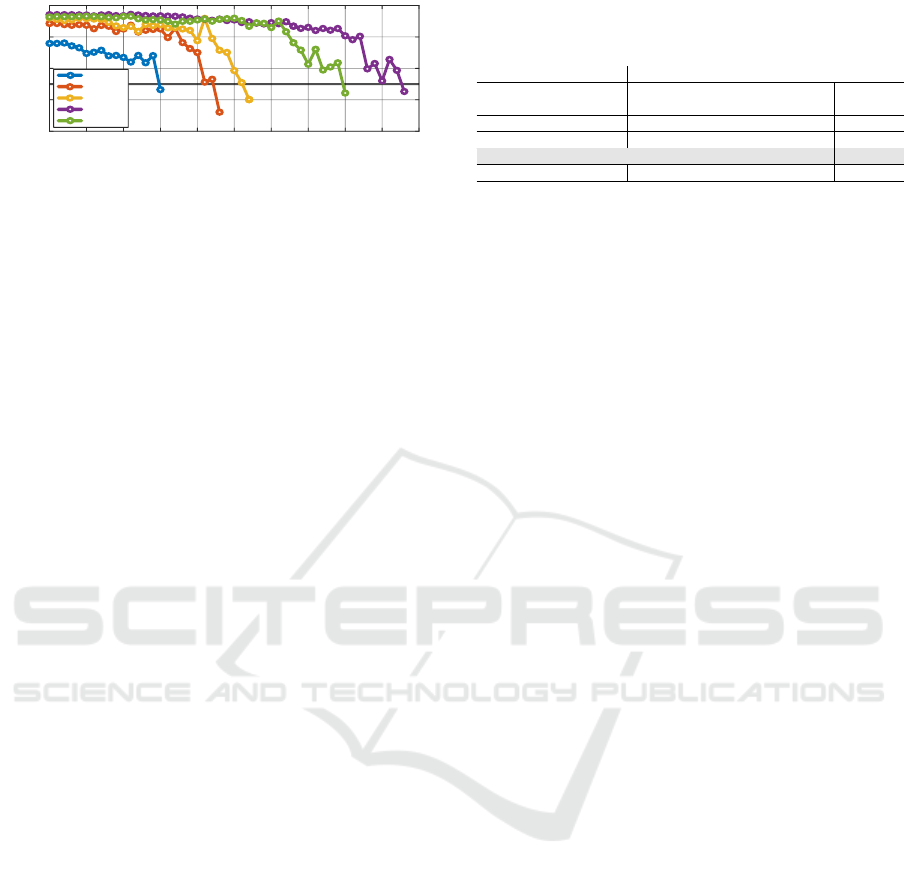
Number of Iterations. As proven that our method
needs more iterations to generate noise to fool large
models, we also provide the number of iterations to
generate such perturbations, as shown in Fig.6, which
shows the approximately-proportional trend between
the number of iterations to the sizes of models.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
32
0 5 10 15 20 25 30 35 40 45 50
Iteration
0.6
0.7
0.8
0.9
1.0
Confidence Threshold
YOLOv8n
YOLOv8s
YOLOv8m
YOLOv8l
YOLOv8x
Figure 6: The needed (minimum required) iterations for
Alg.1 to fool various-sized models with confidence thresh-
olds of 0.75.
5.4 Success Rate of Adversarial Images
to Models with Different Confidence
Thresholds
Since different detectors are often set with different
confidence thresholds, we analyze how many itera-
tions our method takes to obtain the success attack
rate of 100%, where all objects presented in the im-
age are misdetected. Fig.7 (left) shows the increas-
ing effectiveness of noises added to the raw image
over 90 iterations. In fact, with a confidence thresh-
old of 0.50, the detector is unable to detect objects
in the image; meanwhile, the detector with a confi-
dence threshold of 0.25 can still detect objects, but
the detections become inaccurate. starting from the
75
th
iteration. However, this particular image only il-
lustrates results that the bounding boxes are not over-
lapped with each other.
Fig.7 (right) also shows the results where objects
are overlapped with each other: the orange’s bound-
ing box is in the person’s bounding box. Our method
also obtains the success attack rate of 100% to the
model with the confidence threshold of 0.50. Never-
theless, this process takes about 580 iterations to com-
pletely fool the detector.
5.5 Attention of Detection Models
To further explain our method, we analyze how the
model’s attention altered using Grad-CAM (Selvaraju
et al., 2017), as illustrated in Fig.8. Before being at-
tacked (Fig.8a), the model is able to detect objects
with high confidence scores, and its attention map
(Fig.8b) accurately focuses on the areas presumed to
contain objects. However, while performing Grad-
CAM on perturbed images, the model fails to detect
objects surpassing the confidence threshold (Fig.8d).
Moreover, the model identifies the segmented regions,
as visualized on attention maps, belonging to different
classes.
Also, as mentioned in Sec.4.1, our method strives
to decrease the confidence scores of objects in each
bounding box by determining the optimal noises, re-
Table 2: Comparisons of success attack rates between DAG
(Xie et al., 2017) and our method on detection models with
ResNet-50 backbone.
ResNet-50 Backbone
Faster
R-CNN
RetinaNet Swin-T
R-FCN
-RN50
Baseline 27.20 22.90 32.47 76.40
DAG (Xie et al., 2017) - - - 63.93
Ours 5.32 3.58 8.57 -
Succ. Rate 80.44% 84.37% 73.61% 16.32%
sulting in changes in the model’s attention and, there-
after, its detection. Indeed, the attention map fo-
cuses on the same bounding boxes, and their inten-
sities change since the confidence scores are reduced
significantly, leading to misdetection.
Analysis Conclusions. Our analyses allude that
larger models might easily overcome adversarial at-
tacks; however, this also raises the concern of com-
puting power while training these large-sized mod-
els with adversarial examples and deploying them for
real-world applications.
6 EXPERIMENTS
We evaluate our proposed method on MS COCO 2017
(Lin et al., 2014) and PASCAL VOC 2012 (Ever-
ingham et al., 2015) datasets with other detection al-
gorithms of different backbones, including validating
with cross-model and cross-domain datasets and ver-
ifying their transferability to different backbones and
consistency with different detection algorithms. In
specific, the experiments are conducted as follows:
(1) generating adversarial images against one detec-
tor, then (2) perturbing other detectors using those im-
ages without prior knowledge about the models.
6.1 Cross-Model Validation
We use pre-trained models (YOLOv8, Faster-RCNN,
RetinaNet, Swin Transformer) trained on MS COCO
2017 and generate adversarial examples for each
model on the validation set of MS COCO 2017. The
adversarial examples generated by one model are
evaluated by others, including itself. Tab.4 shows that
models are fooled by adversarial images generated by
themselves, in which these images actually include
knowledge of that model: the most optimal (best) per-
turbation to make that specific model misdetect.
The results also show that the larger-sized mod-
els generate adversarial examples that are more effec-
tive against smaller ones. Notably, also from Tab.4,
our method best performs when testing its adversar-
ial examples (against YOLOv8x) on other models
since it produces more generalized noises affecting
Distortion-Aware Adversarial Attacks on Bounding Boxes of Object Detectors
33
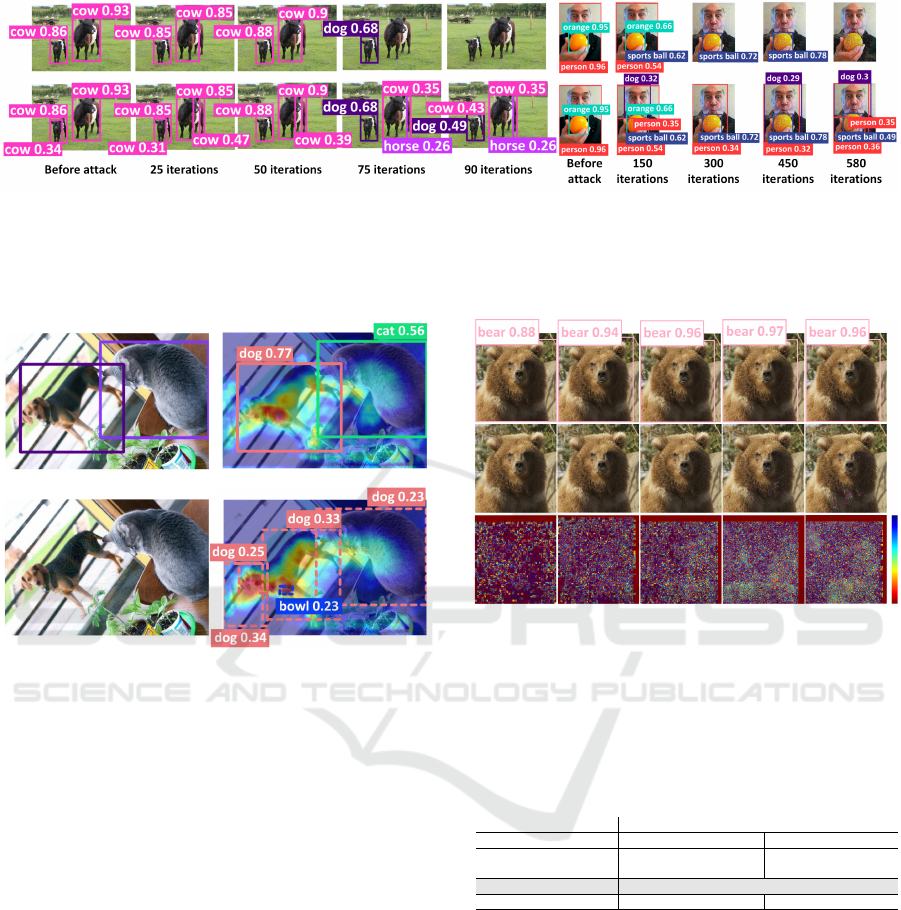
Figure 7: Adversarial images generated by Alg.1 at different iterations and how they affect the detector’s performance
at confidence thresholds of 0.50 (top) and 0.25 (bottom), respectively. The case of non-overlapping bounding boxes (left)
effectively causes the detector to recognize the wrong objects before misdetecting objects at the 90
th
iteration at a confidence
threshold of 0.50. Compared to the case where overlapped bounding boxes exist (right), Alg.1 takes more iterations (580
iterations) to fool the detector with the same configuration.
(a) Raw image with detections (b) Attention map before perturbation
(c) Generated adversarial image (d) Attention map after perturbation
Figure 8: Visualization on attention maps before and after
perturbation. The confidence scores of the detections on the
attention regions are reduced after being attacked.
other models. Excluding attacking itself, these ad-
versarial images best attack YOLOv8s and worst at-
tack Swin-T with 91.19% (dropping the model’s mAP
from 33.26 to 2.93) and 73.61% (from 32.47 down to
8.57) success attack rates, respectively.
6.2 Cross-Domain Datasets Validation
To verify the generality of our attacking method, we
also conduct experiments in which models are trained
on one dataset and evaluated on another dataset.
As presented in Sec.6.1, models are trained on MS
COCO 2017, and adversarial examples are also gener-
ated from MS COCO 2017. Tab.5 shows that transfer-
ability is robust on another dataset, where pre-trained
models on MS COCO 2017 are tested with adversar-
ial examples generated from the validation set of PAS-
CAL VOC 2012.
Similar to Tab.4, our method again shows its best
performance when testing its adversarial examples
(against YOLOv8x) on other models, where these ad-
Figure 9: Comparisons between added distortion amounts
(bottom row) on bounding box regions to fool YOLOv8
from the smallest to the largest size, respectively (by col-
umn). Similarity scores computed by Eq.11 between orig-
inal and perturbed images are 0.9996, 0.9962, 0.9925,
0.9580, and 0.9436, respectively.
Table 3: Success attack rates between DAG (Xie et al.,
2017), UEA (Wei et al., 2019), and our method on one-
stage and two-stage detection algorithms.
One-Stage Two-Stage
Baseline 68.00 68.00 25.04 70.10 70.10 27.90
DAG (Xie et al., 2017) 5.00 - - 64.00 - -
UEA (Wei et al., 2019) - 5.00 - - 20.00 -
Ours - - 1.69 - - 2.10
Succ. Rate 92.65% 92.65% 93.25% 8.70% 71.47% 92.47%
versarial examples best attack YOLOv8n and worst
attack Swin-T with 99.31% (from 45.15 down to
0.31) and 73.61% (from 53.35 down to 0.67) suc-
cess attack rates, respectively. Moreover, the gener-
ated adversarial examples against YOLOv8x on the
PASCAL VOC 2012 validation set even outperform
those generated on the MS COCO 2017 validation set;
indeed, they achieve the average success attack rates
of 99% compared to 86.6% of average success attack
rate.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
34

YOLOv8x Detections
Original Image Perturbing YOLOv8x Perturbing YOLOv8n Perturbing YOLOv8s Perturbing YOLOv8m
Perturbing YOLOv8l Perturbing Faster R-CNN Perturbing RetinaNet Perturbing Swin-T
Figure 10: Qualitative results of adversarial images against YOLOv8x that perturbs other detection models, including YOLO’s
versions, Faster R-CNN, RetinaNet, and Swin Transformer, at confidence thresholds of 0.50. The image is taken from the MS
COCO 2017 dataset.
Table 4: Cross-model transferability among commonly used detection models (in mAP) of various-sized YOLO’s, Faster
R-CNN, RetinaNet, and Swin Transformer, at confidence thresholds of 0.50. Each model is evaluated on the MS COCO
2017 validation set as a baseline. Meanwhile, Alg.1 best performs attacks on other models when generating adversarial
perturbation against YOLOv8x.
Added Perturbation
YOLOv8n YOLOv8s YOLOv8m YOLOv8l YOLOv8x Faster R-CNN RetinaNet Swin-T
None (baseline) 25.04 33.26 36.98 38.94 40.02 27.90 22.90 32.47
YOLOv8n 0.06 18.12 25.19 28.25 29.52 13.57 10.69 17.22
YOLOv8s 3.32 0.03 16.71 20.68 22.45 9.68 7.31 13.66
YOLOv8m 2.21 4.35 0.02 13.12 15.32 7.03 5.01 10.69
YOLOv8l 1.69 3.52 6.90 0.02 11.37 6.36 4.35 10.18
YOLOv8x 1.42 2.93 5.47 6.50 0.05 5.32 3.58 8.57
Faster R-CNN 3.86 6.96 10.51 13.09 13.96 0.10 0.60 12.70
RetinaNet 6.01 9.99 14.22 17.01 18.01 2.10 0.30 16.00
Swin-T 2.98 5.83 9.49 12.42 14.50 11.30 8.70 0.10
Table 5: Cross-model transferability among commonly used detection models (in mAP) of various-sized YOLO’s, Faster
R-CNN, RetinaNet, and Swin Transformer, with confidence thresholds set to 0.50. Each model is evaluated on the PASCAL
VOC 2012 validation set as a baseline. Again, Alg.1 best performs attacks on other models when generating adversarial
perturbation against YOLOv8x.
Added Perturbation
YOLOv8n YOLOv8s YOLOv8m YOLOv8l YOLOv8x Faster R-CNN RetinaNet Swin-T
None (baseline) 45.15 54.45 60.80 63.47 64.00 46.13 49.54 53.35
YOLOv8n 0.34 0.64 0.92 1.23 1.25 0.65 0.89 1.03
YOLOv8s 0.36 0.39 0.80 1.07 1.08 0.60 0.86 0.95
YOLOv8m 0.34 0.43 0.52 0.90 1.00 0.58 0.78 0.87
YOLOv8l 0.35 0.48 0.65 0.70 0.88 0.49 0.62 0.75
YOLOv8x 0.31 0.45 0.61 0.66 0.72 0.41 0.58 0.67
Faster R-CNN 5.13 9.04 16.02 18.51 19.75 0.09 1.42 17.23
RetinaNet 8.84 13.94 21.47 23.89 25.57 1.97 0.12 21.97
Swin-T 2.99 6.06 12.39 15.30 18.18 12.18 17.38 0.18
6.3 Transferability to Different
Backbones
Furthermore, we compare our methods with DAG
(Xie et al., 2017) regarding the transferability to other
backbones: the adversarial images generated against
a different backbone are used to attack detectors with
ResNet-50 as backbones. In specific, we used the
images (from the PASCAL VOC dataset) generated
against YOLOv8x to perturb Faster R-CNN, Reti-
naNet, and Swin Transformer. As shown in Tab.2,
we can still achieve a success attack rate of 80.44%,
84.37%, and 73.61%, respectively; meanwhile, DAG
only achieved 16.23% while performing the same
task.
6.4 Consistency with Detection
Algorithms
Also, to see how consistent Alg.1 performs with
different detection algorithms, we experiment it on
both one-stage and two-stage detection algorithms
and compare our results with DAG (Xie et al., 2017)
Distortion-Aware Adversarial Attacks on Bounding Boxes of Object Detectors
35

and UEA (Wei et al., 2019), as depicted in Tab.3.
All three methods provide high results (above 90%)
on one-stage detection methods; however, the per-
formances of DAG and UEA drop when perform-
ing adversarial attacks on two-stage detection meth-
ods, while our proposed technique can still maintain
a consistent success attack rate of 92.47% compared
to 93.25% from one-stage methods.
6.5 Qualitative Results
From Tab.4 and Tab.5, we conclude that adversar-
ial images generated against YOLOv8x maintain the
best overall transferability and consistency of attacks
to other models. As shown in Fig.10, the qualitative
results of a perturbed image against YOLOv8x can
make other detection models misdetect. Fig.10 also
shows that the perturbation amount is imperceptible,
the stable transferability to other backbones, and the
consistency with one-stage and two-stage methods,
restating our key properties in Tab.1.
6.6 Discussions
Our cross-model validation experiments demonstrate
the strong transferability of adversarial examples
across diverse detection architectures. Adversarial
images crafted against YOLOv8x effectively misled
other YOLOv8 variants, as well as models like Faster
R-CNN, RetinaNet, and Swin Transformer, achieving
high success rates. Notably, larger models, such as
YOLOv8x, not only demonstrated greater robustness
but also generated adversarial examples that general-
ized better to other models. This trend suggests that
larger models architectural complexity enables them
to produce perturbations that impact shared features
across different backbones.
Cross-domain validations further support the gen-
eralizability of our method. Adversarial examples
generated on the MS COCO 2017 dataset remained
effective when tested on PASCAL VOC 2012, achiev-
ing success rates comparable to in-domain experi-
ments. These results underline the robustness of
our perturbation approach, which leverages model-
agnostic loss gradients to craft transferable adver-
sarial examples. This ability to maintain high effi-
cacy across datasets enhances the practicality of our
method for black-box attack scenarios, where access
to target model specifics is limited.
The transferability of adversarial examples to dif-
ferent backbones also highlights the adaptability of
our approach. Using adversarial examples gener-
ated against YOLOv8x, we observed consistent at-
tack success rates on models with ResNet-50 back-
bones, such as Faster R-CNN and RetinaNet, and
even on transformer-based models like Swin Trans-
former. These findings indicate that our method ef-
fectively exploits fundamental vulnerabilities in ob-
ject detection pipelines, regardless of the underlying
network architecture.
Our experiments also confirm the consistency of
our method across one-stage and two-stage detection
algorithms. While prior methods like DAG and UEA
showed a drop in performance on two-stage detectors,
our technique maintained high success rates across
both categories. This consistency is attributed to the
iterative perturbation approach, which accurately tar-
gets bounding box regions while controlling distor-
tion, ensuring applicability across different detection
paradigms.
Qualitative results and visual analyses provide fur-
ther evidence of our methods efficacy. Grad-CAM vi-
sualizations reveal how adversarial perturbations al-
ter model attention, reducing confidence scores for
objects in bounding boxes and eventually leading to
misdetections. Additionally, the perturbations remain
imperceptible to human observers, striking an effec-
tive balance between visual fidelity and attack perfor-
mance. These properties make our approach suitable
for real-world applications where stealth is essential.
Despite these strengths, our method encounters
challenges in scenarios involving overlapping bound-
ing boxes, which require more iterations and greater
distortion to achieve similar success rates. Address-
ing these limitations through advanced perturbation
strategies or adaptive adversarial training could en-
hance the robustness of future detection systems. Fur-
thermore, exploring domain adaptation techniques
may improve cross-domain transferability even fur-
ther.
7 CONCLUSIONS
This paper presents a distortion-aware adversarial at-
tack technique on bounding boxes of state-of-the-art
object detectors by leveraging target-attacked pixel
gradient ascents. By knowing the gradient ascents
of those pixels, we iteratively add the perturbation
amount to the original image’s masked regions until
the success attack rate or distortion threshold is ob-
tained or until the detector no longer recognizes the
presented objects. To verify the effectiveness of the
proposed method, we evaluate our approach on MS
COCO 2017 and PASCAL VOC 2012 datasets and
achieve success attack rates of up to 100% and 98%,
respectively. Also, through validating cross-model
transferability, we prove that our method can perform
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
36

black-box attacks when generating primary adversar-
ial images on YOLOv8x. As the original motivation
of our work, we propose this method to expose the
vulnerabilities in neural networks and facilitate build-
ing more reliable detection models under adversary
attacks. However, we reserve the task of improving
the model’s robustness for future works. Upon so-
cial goods, we also make our source code available
to encourage others to build defense methods for this
attack method.
REFERENCES
Alaifari, R., Alberti, G. S., and Gauksson, T. (2018). Adef:
an iterative algorithm to construct adversarial defor-
mations. In International Conference on Learning
Representations.
Bochkovskiy, A., Wang, C.-Y., and Liao, H.-Y. M. (2020).
Yolov4: Optimal speed and accuracy of object detec-
tion.
Carlini, N. and Wagner, D. (2017). Towards evaluating the
robustness of neural networks. In 2017 ieee sympo-
sium on security and privacy (sp), pages 39–57. Ieee.
Chen, P.-Y., Sharma, Y., Zhang, H., Yi, J., and Hsieh, C.-J.
(2018). Ead: elastic-net attacks to deep neural net-
works via adversarial examples. In Proceedings of the
AAAI conference on artificial intelligence, volume 32.
Dang, T., Nguyen, K., and Huber, M. (2023). Multipla-
nar self-calibration for mobile cobot 3d object manip-
ulation using 2d detectors and depth estimation. In
2023 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems (IROS), pages 1782–1788.
IEEE.
Dang, T., Nguyen, K., and Huber, M. (2024). V3d-
slam: Robust rgb-d slam in dynamic environments
with 3d semantic geometry voting. arXiv preprint
arXiv:2410.12068.
Du, A., Chen, B., Chin, T.-J., Law, Y. W., Sasdelli, M.,
Rajasegaran, R., and Campbell, D. (2022). Physical
Adversarial Attacks on an Aerial Imagery Object De-
tector. pages 1796–1806.
Everingham, M., Eslami, S. A., Van Gool, L., Williams,
C. K., Winn, J., and Zisserman, A. (2015). The pascal
visual object classes challenge: A retrospective. In-
ternational journal of computer vision, 111:98–136.
Goodfellow, I. J., Shlens, J., and Szegedy, C. (2015). Ex-
plaining and harnessing adversarial examples. In Ben-
gio, Y. and LeCun, Y., editors, 3rd International Con-
ference on Learning Representations, ICLR 2015, San
Diego, CA, USA, May 7-9, 2015, Conference Track
Proceedings.
Im Choi, J. and Tian, Q. (2022). Adversarial attack and
defense of yolo detectors in autonomous driving sce-
narios. In 2022 IEEE Intelligent Vehicles Symposium
(IV), pages 1011–1017. IEEE.
Jocher, G., Chaurasia, A., and Qiu, J. (2023). YOLO by
Ultralytics.
Kurakin, A., Goodfellow, I. J., and Bengio, S. (2018). Ad-
versarial examples in the physical world. In Artificial
intelligence safety and security, pages 99–112. Chap-
man and Hall/CRC.
Lin, T.-Y., Goyal, P., Girshick, R., He, K., and Doll
´
ar, P.
(2017). Focal loss for dense object detection. In
Proceedings of the IEEE international conference on
computer vision, pages 2980–2988.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft coco: Common objects in context. In Com-
puter Vision–ECCV 2014: 13th European Confer-
ence, Zurich, Switzerland, September 6-12, 2014, Pro-
ceedings, Part V 13, pages 740–755. Springer.
Lindeberg, T. (2012). Scale invariant feature transform.
Liu, X., Yang, H., Liu, Z., Song, L., Chen, Y., and Li, H.
(2019). DPATCH: an adversarial patch attack on ob-
ject detectors. In Espinoza, H., h
´
Eigeartaigh, S.
´
O.,
Huang, X., Hern
´
andez-Orallo, J., and Castillo-Effen,
M., editors, Workshop on Artificial Intelligence Safety
2019 co-located with the Thirty-Third AAAI Confer-
ence on Artificial Intelligence 2019 (AAAI-19), Hon-
olulu, Hawaii, January 27, 2019, volume 2301 of
CEUR Workshop Proceedings. CEUR-WS.org.
Liu, Z., Lin, Y., Cao, Y., Hu, H., Wei, Y., Zhang, Z., Lin,
S., and Guo, B. (2021). Swin transformer: Hierar-
chical vision transformer using shifted windows. In
Proceedings of the IEEE/CVF international confer-
ence on computer vision, pages 10012–10022.
Lu, J., Sibai, H., and Fabry, E. (2017). Adversarial Exam-
ples that Fool Detectors. arXiv:1712.02494 [cs].
Lu, Y. (2019). The Level Weighted Structural Similar-
ity Loss: A Step Away from MSE. Proceedings
of the AAAI Conference on Artificial Intelligence,
33(01):9989–9990. Number: 01.
Madry, A., Makelov, A., Schmidt, L., Tsipras, D., and
Vladu, A. (2018). Towards deep learning models
resistant to adversarial attacks. In 6th International
Conference on Learning Representations, ICLR 2018,
Vancouver, BC, Canada, April 30 - May 3, 2018, Con-
ference Track Proceedings. OpenReview.net.
Moosavi-Dezfooli, S.-M., Fawzi, A., and Frossard, P.
(2016). DeepFool: A Simple and Accurate Method
to Fool Deep Neural Networks. pages 2574–2582.
Nguyen, K., Dang, T., and Huber, M. (2024a). Real-time 3d
semantic scene perception for egocentric robots with
binocular vision. arXiv preprint arXiv:2402.11872.
Nguyen, K., Dang, T., and Huber, M. (2024b). Volumetric
mapping with panoptic refinement using kernel den-
sity estimation for mobile robots.
Puccetti, T., Zoppi, T., and Ceccarelli, A. (2023). On the ef-
ficacy of metrics to describe adversarial attacks. arXiv
preprint arXiv:2301.13028.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. Advances in neural information
processing systems, 28.
Rublee, E., Rabaud, V., Konolige, K., and Bradski, G.
(2011). Orb: An efficient alternative to sift or surf.
Distortion-Aware Adversarial Attacks on Bounding Boxes of Object Detectors
37

In 2011 International conference on computer vision,
pages 2564–2571. Ieee.
Selvaraju, R. R., Cogswell, M., Das, A., Vedantam, R.,
Parikh, D., and Batra, D. (2017). Grad-cam: Visual
explanations from deep networks via gradient-based
localization. In Proceedings of the IEEE international
conference on computer vision, pages 618–626.
Song, D., Eykholt, K., Evtimov, I., Fernandes, E., Li, B.,
Rahmati, A., Tramer, F., Prakash, A., and Kohno, T.
(2018). Physical adversarial examples for object de-
tectors. In 12th USENIX workshop on offensive tech-
nologies (WOOT 18).
Wang, Z., Bovik, A. C., Sheikh, H. R., and Simoncelli, E. P.
(2004). Image quality assessment: from error visi-
bility to structural similarity. IEEE transactions on
image processing, 13(4):600–612.
Wei, X., Liang, S., Chen, N., and Cao, X. (2019). Trans-
ferable adversarial attacks for image and video object
detection. In Kraus, S., editor, Proceedings of the
Twenty-Eighth International Joint Conference on Arti-
ficial Intelligence, IJCAI 2019, Macao, China, August
10-16, 2019, pages 954–960. ijcai.org.
Xie, C., Wang, J., Zhang, Z., Zhou, Y., Xie, L., and Yuille,
A. (2017). Adversarial examples for semantic seg-
mentation and object detection. In Proceedings of
the IEEE international conference on computer vi-
sion, pages 1369–1378.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
38
