
Pose-Centric Motion Synthesis Through Adaptive Instance
Normalization
Oliver Hixon-Fisher
a
, Jarek Francik
b
and Dimitrios Makris
c
Kingston University, London, U.K.
{k2052803, jarek,d.makris}@kingston.ac.uk
Keywords:
Motion Synthesis, Variational Auto-Encoder, Generative Adversarial Network, Adaptive Instance
Normalization.
Abstract:
In pose-centric motion synthesis, existing methods often depend heavily on architecture-specific mechanisms
to comprehend temporal dependencies. This paper addresses this challenge by introducing the use of adap-
tive instance normalization layers to capture temporal coherence within pose-centric motion synthesis. We
demonstrate the effectiveness of our contribution through state-of-the-art performance in terms of Fr
´
echet In-
ception Distance (FID) and comparable diversity scores. Evaluations conducted on the CMU MoCap and the
HumanAct12 datasets showcase our method’s ability to generate plausible and high-quality motion sequences,
underscoring its potential for diverse applications in motion synthesis.
1 INTRODUCTION
Human motion synthesis is the process of generat-
ing realistic motion for a humanoid skeleton. This
capability is crucial for applications requiring realis-
tic character animations, such as animated films, vir-
tual avatars, or controlling non-player characters in
computer games. To meet such applications human
motion synthesis must meet several requirements, in-
cluding the ability to synthesize poses in real-time,
ensuring the animations are realistic and adapt to var-
ious guided or unguided scenarios.
Existing motion synthesis systems adopt widely
different approaches (Mourot et al., 2021). To reflect
how data is utilised, we propose a rough classifica-
tion into two categories, each with distinct domains
of application and specific challenges. Sequence-
centric methods synthesize an entire sequence at once
(Raab et al., 2024; Li et al., 2022; Tulyakov et al.,
2017; Petrovich et al., 2021; Tevet et al., 2022; Zhang
et al., 2023), whereas pose-centric methods build a se-
quence by iteratively adding one pose at a time (Guo
et al., 2020; Mao et al., 2024; Xu et al., 2022; Luo
et al., 2020; Hassan et al., 2021). Consequently, pose-
centric and sequence-centric systems handle aspects
of a motion sequence, such as temporal coherence, in
a
https://orcid.org/0009-0009-3157-4000
b
https://orcid.org/0009-0003-8927-2802
c
https://orcid.org/0000-0001-6170-0236
different ways. In sequence-centric approaches, tem-
poral coherence is explicitly modelled through learn-
ing the motion dynamics across the entire sequence.
In contrast, pose-centric solutions address the same
problem by presenting a method which allows fu-
ture poses to be conditioned on the previous pose.
This normally requires the application of an individ-
ual methodology for each solution, depending on its
underlying architecture. On the other hand, the de-
pendency on only two poses to maintain temporal
coherence makes pose-centric solutions much more
suitable for real-time applications, such as computer
games, compared to sequence-based systems.
This paper concentrates on unconditional pose-
centric solutions and proposes a novel approach for
modelling temporal coherence based on the Adap-
tive Instance Normalisation (AdaIN), a method ini-
tially proposed in (Huang and Belongie, 2017) for
neural style transfer between images and later used
for motion style transfer (Wang et al., 2020). In our
work, AdaIN ensures the transfer of temporal coher-
ence from one pose to another, resulting in smooth
motion synthesis. This approach addresses the limi-
tations of existing pose-centric methods, which typi-
cally rely on architecture-specific techniques to main-
tain temporal coherence, leading to bias in the archi-
tectures used. We demonstrate that this approach can
be applied to various architectures by applying it to
both a VAE-based (Guo et al., 2020) and a normaliz-
ing flow (Wen et al., 2021) approaches.
Hixon-Fisher, O., Francik, J. and Makris, D.
Pose-Centric Motion Synthesis Through Adaptive Instance Normalization.
DOI: 10.5220/0013102100003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 2: VISAPP, pages
39-47
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
39

2 RELATED WORK
2.1 Human Motion Synthesis
Sequence-centric approaches adopt a holistic model
of human motion, constructing a latent space that rep-
resents complete motion sequences. This approach
captures both the primary characteristics of the mo-
tion and secondary features, such as temporal coher-
ence. For example, studies like MoDi (Raab et al.,
2024) demonstrate that while results from early train-
ing cycles exhibit poor temporal coherence, later ex-
amples show significant improvements. Architec-
turally, sequence-centric methods are compatible with
most major generative AI techniques. State-of-the-
art methods employ various architectures, including
GANs like MoCoGAN (Tulyakov et al., 2017), diffu-
sion models such as MoFusion (Dabral et al., 2023),
and VAE-based models like ACTOR (Petrovich et al.,
2021). The primary strength of sequence-centric sys-
tems lies in their holistic approach: addressing all
aspects of a motion sequence leads to reduced com-
plexity compared to pose-centric solutions. However,
their drawback is their inability to function online in
real time.
Pose-centric solutions, on the other side, synthe-
sise a sequence pose-by-pose, using either a latent
space of poses, such as Action2Motion(Guo et al.,
2020), or a reward function such as CARL(Luo et al.,
2020). They may be further classified depending on
their predominant architectural approach: reinforce-
ment learning (Mao et al., 2024), (Luo et al., 2020),
dimensionality reduction-based methods such as vari-
ational auto-encoders (Guo et al., 2020) or GANs(Xu
et al., 2022), and lastly transformer-based approaches
(Kania et al., 2021). Whilst each category features
a unique approach to condition future poses on the
preceding pose or set of poses, they all must ensure
that the synthesised individual poses can formulate
a valid, temporally coherent motion sequence. To
achieve this, they require an extra step, which de-
pends on the architecture model applied. For exam-
ple, in the case of transformer-based approaches such
as (Xu et al., 2022), they employ the attention mecha-
nism to learn this relationship between poses, whereas
VAE-based approaches such as Action2Motion (Guo
et al., 2020) or MotionNet (Hassan et al., 2021) em-
ploy the Kullback–Leibler divergence ubiquitous to
their VAE-based architecture.
However, the requirement of this extra step
severely constrains the choice of architectures that are
employable in pose-centric solutions. On the posi-
tive side, their key benefit is that they are capable of
online real-time motion synthesis, as shown by state-
of-the-art real-time solutions, such as MotionNet in
computer games (Hassan et al., 2021), and CARL in
robotics (Luo et al., 2020).
2.2 Adaptive Instance Normalization
Instance normalization was proposed by (Ulyanov
and Vedaldi, 2017) for neural style transfer, i.e. for
transferring the style from one image to another.
Specifically, they proposed a method of employing
instance normalization instead of batch normalization
within a network that can allow the system to learn
how to apply a specific style to any supplied input im-
age:
IN(x) = γ
x − µ(x)
σ(x)
+ β (1)
The equation above highlights the form of normaliza-
tion proposed in their original work, where x is the
content image, µ(x) and σ(x) are its mean and stan-
dard deviation, respectively, and finally, γ and β are
learnable parameters.
Adaptive Instance Normalization (AdaIN), pro-
posed by (Huang and Belongie, 2017), is an improved
version of instance normalization with two significant
advantages. Firstly, it is at least two orders of magni-
tude faster. Secondly, instead of retraining the system
for each desired style, the user can specify a target
style by providing a single example. AdaIN works by
aligning the mean and variance of the content image
with the mean and variance of the style image. This
lack of learnable parameters allows the system to be
used without any restriction on a variety of styles. The
method is formulated as follows:
AdaIN(x, y) = σ(y)
x − µ(x)
σ(x)
+ µ(y) (2)
where, as previously, x refers to the content image,
and µ(x) and σ(x) are its mean and standard deviation,
respectively. Additionally, y refers to the style image,
and µ(y) and σ(y) are its mean and standard deviation,
respectively.
AdaIN has been successfully applied to style
transfer across various domains. For example, Ruder
et al. (Ruder et al., 2016) demonstrated its application
in video stylization. Wang et al. (Wang et al., 2020),
used AdaIN to transfer the pose of a 3D mesh to an-
other with a different silhouette, in a process termed
neural pose transfer, but not in the context of a motion
sequence and without the requirement of temporal co-
herence.
The novel contribution of this paper is a new ap-
proach to learning the temporal relationships between
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
40

poses in a pose-centric motion synthesis solution. Our
approach, inspired by AdaIN’s method of decoupling
the style and content of images, aims to combine the
content from one pose with the temporal aspect of an-
other to create smooth and realistic animations.
3 METHODOLOGY
The proposed methodology is underpinned by a VAE-
GAN hybrid architecture, codified by Razghandi et al
(Razghandi et al., 2022). It incorporates a Discrimi-
nator alongside the Variational Auto-Encoder (VAE)
architecture combined in such a way that the VAE de-
coder plays the role of the generator within a GAN
structure.
Figure 1: The structure of the proposed solution.
As shown in Figure 1, we propose a training stage
and a dedicated sequence generation stage which al-
low us to manipulate the proposed system to generate
a full sequence of motion. The solution treats each
pose as a one-dimensional vector of floating point val-
ues representing Euler angles of joints in the animated
skeleton.
The core components of the solution are described
in the following subsections; 3.1 (Encoder), 3.2 (De-
coder), 3.3 (AdaIN), and 3.4 (Discriminator). 3.5 out-
lines the training loop employed, and finally 3.6 de-
scribes the iterative sequence generation process.
3.1 Encoder
The structure of the encoder differs from existing
VAE-based solutions, such as Action2Motion (Guo
et al., 2020), which employs a single-layered gated
recurrent unit (GRU) as the encoder. Our multi-layer
approach is driven by prior experimentation, demon-
strating that a shallower network resulted in poor per-
formance.
Figure 2: The high-level structure of the encoder.
The encoder is structured to take a single pose
as input and encode it into a compressed, lower-
dimensional representation. This representation is
then passed through two separate linear layers to out-
put the mean and standard deviation of the latent
space.
Figure 3: The internal structure of each block of the en-
coder.
The encoder consists of ten blocks, as depicted
in Figure 2, with the internal structure of each block
shown in Figure 3. The downsample block, repeated
five times, is designed to sample down the incoming
data by applying a convolution with a kernel size of
3 × 3 and a stride of 2. Then, the feature extraction
block, also repeated five times, contains three con-
volutional layers: the first two layers are point-wise
convolutions, and the third layer uses a kernel size of
1 × 1 and a stride of 3.
3.2 Decoder
The input to the VAE decoder is the sampled latent
vector, denoted as Z
t
in Figure 4. This vector consists
of a mean µ
t
and a standard deviation σ
t
, and is sub-
sequently mapped into a meaningful point in the pose
space, using a process known as the reparameteriza-
tion trick. In the training phase, we augment this ar-
chitecture by adding dedicated blocks which accept
the next pose X
t+1
(the real pose following the cur-
rently processed pose). This trick allows us to guide
the decoder and enforce the temporal coherence of the
generated sequence.
Compared with state-of-the-art VAE models, the
proposed decoder architecture is noticeably more
Pose-Centric Motion Synthesis Through Adaptive Instance Normalization
41
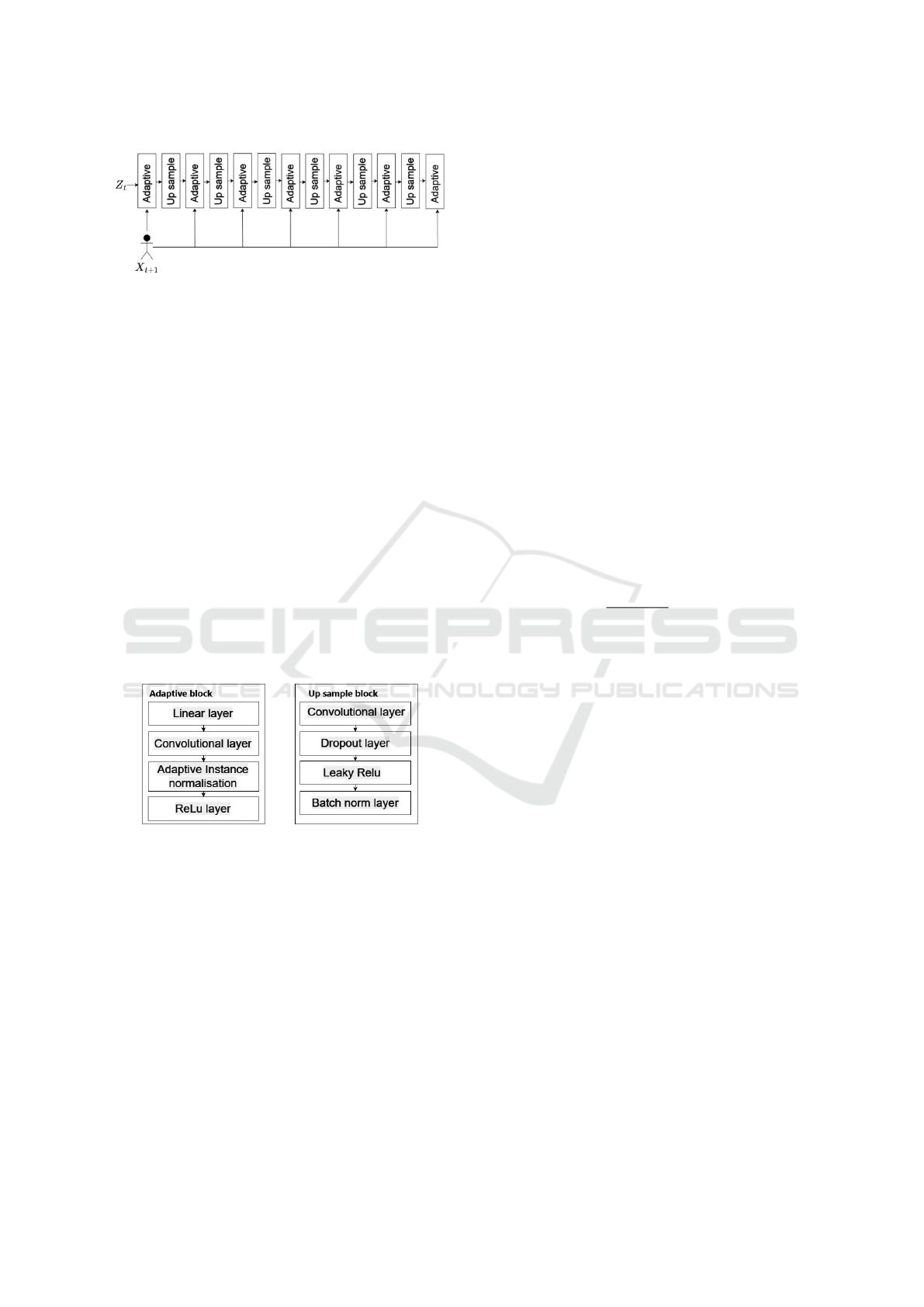
Figure 4: The high-level overview of the structure of the
decoder.
complex. For example, Action2Motion (Guo et al.,
2020) decoder consists of just a GRU cell with 2 lay-
ers. while MotionNet (Hassan et al., 2021) features
several sub-encoders and one main decoder, which
comprise only a set of linear layers.
In contrast, our decoder network consists of thir-
teen blocks in total, alternating between adaptive-
focused and upsampling-focused blocks. The up-
sampling blocks are responsible for manipulating the
dimensions of the incoming vectors, while the adap-
tive blocks enforce the temporal coherence between
the poses. The internal structure of each block is il-
lustrated in Figure 5. The adaptive blocks, which con-
stitute the primary contribution of this paper, incorpo-
rate Adaptive Instance Normalisation layers (AdaIN),
inspired by the original work outlined in (Huang and
Belongie, 2017). By incorporating these layers at var-
ious stages, they can effectively influence the vectors
as they progress through the decoder’s architecture.
Figure 5: The internal structure of each block employed in
the decoder.
3.3 Adaptive Instance Normalization
The decoder’s performance is augmented by the in-
clusion of adaptive blocks. The content of these
blocks is shown in Figure 5 and described in sec-
tion 3.2. The adaptive blocks are structured so that
they can be applied at multiple resolutions, as the di-
mension of the decoded vector is increased through
the forward pass of the decoder. Whilst inspired by
AdaIN, the proposed solution deviates noticeably.
Our decoder is supplied with two values: the la-
tent vector Z
t
, derived from the characteristics pro-
vided by the encoder, and the next pose vector X
t+1
,
taken directly from the input dataset. The first step
in the proposed solution is to calculate the mean and
standard deviation of the next pose vector X
t+1
:
µ
t+1
= µ(X
t+1
) (3)
σ
t+1
= σ(X
t+1
) (4)
where µ
t+1
and σ
t+1
represent the mean and the stan-
dard deviation, respectively, calculated for each angle
in the pose vector. Further to this we pass µ
t+1
and
σ
t+1
through separate linear layers:
ˆµ
t+1
= µ
t+1
A
T
µ
+ b
µ
(5)
ˆ
σ
t+1
= σ
t+1
A
T
σ
+ b
σ
(6)
where ˆµ
t+1
and
ˆ
σ
t+1
refer to the final output of the
linear layers. Subsequently, we apply a variant of
Adaptive Instance Normalization to the incoming la-
tent vector Z
t
. This form of normalization is imple-
mented in PyTorch (PyTorch, 2024). We further shift
and scale the instance normalized vector using
ˆ
σ
t+1
and ˆµ
t+1
:
ˆ
Z
t
=
ˆ
σ
t+1
∗
Z
t
− µ(Z
t
)
σ(Z
t
) + ε
∗ γ + β
+ ˆµ
t+1
(7)
where µ(Z
t
) and σ(Z
t
) are the mean and standard de-
viation of the latent vector Z
t
, ε is a small value added
to avoid dividing by zero, γ and β are both learnable
parameters and, lastly, ˆµ
t+1
and
ˆ
σ
t+1
are the vectors
calculated in equation 5 and equation 6, respectively.
The result of this equation,
ˆ
Z
t
, is the final latent vec-
tor which is then passed on to the next layer in the
decoder as shown in section 3.2.
3.4 Discriminator
A discriminator is normally part of a GAN, with the
purpose of evaluating the output of the generator and
therefore guiding it to the target distribution. Figure 6
outlines the internal configuration of the discrimina-
tor.
3.5 Training
In the training stage, the VAE architecture is trained
so that the decoder outputs poses which are tempo-
rally coherent with the one pose provided to the en-
coder. To achieve this we train the system in such a
way as to supply the system with a pair of sequential
poses, one is passed to the encoder and the other is
sent to the decoder and the discriminator. In Figure
1, the pose sent to the encoder is referred to as X
t
and
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
42

Figure 6: The structure of the discriminator.
the real next pose is referred to as X
t+1
. Figure 1 also
details that in the proposed solution we incorporate a
noise vector by adding one to the latent Z
t
vector.
3.5.1 Loss Function
Typically, a variational auto-encoder employs two
components in its loss function: a reconstruction loss,
which we have replaced with a temporal adaptation
loss, and the Kullback–Leibler divergence (KL di-
vergence). The KL divergence is a distance calcula-
tion between the distribution of the latent space, rep-
resented by the mean and standard deviation, and a
Gaussian distribution. We further augment this by in-
corporating a discriminator loss, resulting in a loss
function with three distinct components. To prevent
any single component from dominating the others, we
assign weightings to each of them:
L = w
d
· L
d
+ w
t
· L
t
+ w
kl
· L
kl
(8)
where L
d
refers to the discriminator loss, L
t
is the
temporal adaptation loss, L
kl
is the KL divergence
loss, and w
d
, w
t
, and w
kl
are their respective weight-
ings.
3.5.2 Discriminator Loss
The goal of the discriminator during the training
phase is to assist the VAE by guiding the distribu-
tion to be closer to the target distribution. The exact
method of how the discriminator is employed is taken
from the initial paper on GANs by Goodfellow et al
(Goodfellow et al., 2014).
The discriminator loss is calculated as a mean of
two mean square errors, one calculated for the real
next poses, X
t+1
, and one for the poses generated by
the decoder,
ˆ
X
t+1
:
L
d
= (L
mse
(X
t+1
) + L
mse
(
ˆ
X
t+1
))/2 (9)
The mean square error for the real next poses X
t+1
is given as:
L
mse
(X
t+1
) =
1
n
n
∑
i=1
(d (X
t+1
) − 1)
2
!
(10)
where d(X
t+1
) denotes the discriminator output for
the real next pose, which is the predicted probability
that the samples are real. The discriminator perfor-
mance on the real data should return values closer to
1, hence we find the mean square error between the
discriminator results on the real poses and a vector of
the same length containing just ones.
Similarly, the mean square error for the output of
the decoder/generator
ˆ
X
t+1
is given as:
L
mse
(
ˆ
X
t+1
) =
1
n
n
∑
i=1
(d
ˆ
X
t+1
− 0)
2
!
(11)
This time, the discriminator performance on the
generated (fake) data should return values closer to
0, hence we find the mean square error between the
discriminator results and a vector of the same length
containing just zeroes.
3.5.3 Temporal Adaptation Loss
One aspect of the traditional VAE loss is the use of
a reconstruction loss. Normally this is to encourage
the system to reconstruct the input to the encoder.
The proposed solution encourages the system to re-
construct the next pose in the sequence relative to the
encoded pose. As such, we have referred to this as a
Temporal Adaptation Loss, and defined as the mean
square error between the generated output
ˆ
X
t+1
and
the real next pose in the sequence X
t+1
:
L
t
= (
1
n
n
∑
i=1
(X
t+1
−
ˆ
X
t+1
)
2
) (12)
3.5.4 KL Divergence
The primary loss applied to a variational auto-encoder
is the KL divergence, used to evaluate the distance
between two distributions, typically the latent space
and a Gaussian distribution as expressed by the mean
and variance, provided by the variational encoder.
We use the following equation:
L
kl
=
1
N
N
∑
i=1
−
1
2
D
∑
j=1
1 + log(σ
2
j
) − µ
2
j
− σ
2
j
!
(13)
where N refers to the batch size, D refers to the di-
mensionality of the latent space, µ
j
refers to the mean
of latent space as determined by the encoder, and
lastly σ
2
j
refers to the standard deviation of the latent
space as determined by the encoder.
Pose-Centric Motion Synthesis Through Adaptive Instance Normalization
43

3.6 Iterative Sequence Generation
One of the features of a pose-centric approach is the
presence of a dedicated sequence generation stage.
In the case of the proposed system, this is achieved
via an iterative process which takes advantage of the
training goal of the first stage and is shown in Figure
1.
In the first iteration, a pose from the real dataset
is selected as the system input. In subsequent itera-
tions, the decoder output X
ˆ
t+1
is fed back as the input
for the encoder. Consecutive output values are com-
bined into the resultant sequence of poses, generated
in real time. We rely on the training stage to learn
the inter-pose relationships and the temporal coher-
ence. Notably, unlike in the training session, during
the inference phase, there is no known next pose x
t+1
that we can feed to the decoder as additional input;
instead, we provide a tensor in the shape of a pose
containing all ones.
4 RESULTS
4.1 Datasets
The proposed methodology is tested on two com-
monly used datasets: CMU MoCap dataset (Uni-
versity, 2000) and HumanAct12 dataset (Guo et al.,
2020). The CMU MoCap dataset is a diverse col-
lection of several thousand motion clips of various
lengths. To manage the output we focused on those
that fit the description of ”walk” and ”run”. To deter-
mine the clips that fit into this description, we used
the dataset’s website to generate a valid list. These
criteria gave us a working dataset of 206 animation
sequences and a total pose count of 257,633. The Hu-
manAct12 dataset is considerably smaller, therefore
we do not constrain it to a specific category. It con-
tains a total of 1191 motion clips with a total of 90,099
individual poses.
4.2 Quantitative Results
We use two separate metrics to evaluate the impact
of the proposed changes: Fr
´
echet Inception Distance
(FID) and diversity (Div). These metrics quantify dif-
ferent aspects of the generative process. FID, a stan-
dard metric introduced by Heusel et al. (Heusel et al.,
2017), measures the quality of generated samples by
comparing them to real ones. It evaluates the similar-
ity of the distributions of features extracted by a pre-
trained classifier for both generated and real samples.
A lower FID score has been shown to correlate with
generated samples that more closely resemble those
from the real dataset.
Diversity, on the other hand, focuses solely on
the generated samples, quantifying their inherent vari-
ance, and reflecting the model’s ability to produce a
wide range of samples. This metric is inherently con-
strained by the diversity within the training dataset.
Ideally, a generative system should achieve both a
low FID score and high diversity, indicating that it
can produce high-quality samples that accurately cap-
ture the variability of the entire dataset while remain-
ing indistinguishable from real samples. The comple-
mentary nature of these metrics makes them valuable
when used together, and we have found no compelling
reason to deviate from this approach.
The quantitative results for the CMU MoCap
dataset are shown in Table 1 and the results for the
HumanAct12 dataset are shown in Table 2. This com-
parison only includes unguided solutions, as guided
motion systems are not directly comparable. In the
case of the MotionNet method (Hassan et al., 2021),
we used a single component of a larger system called
SAMP, and analysed its performance as an unguided
solution after removing its interactive elements.
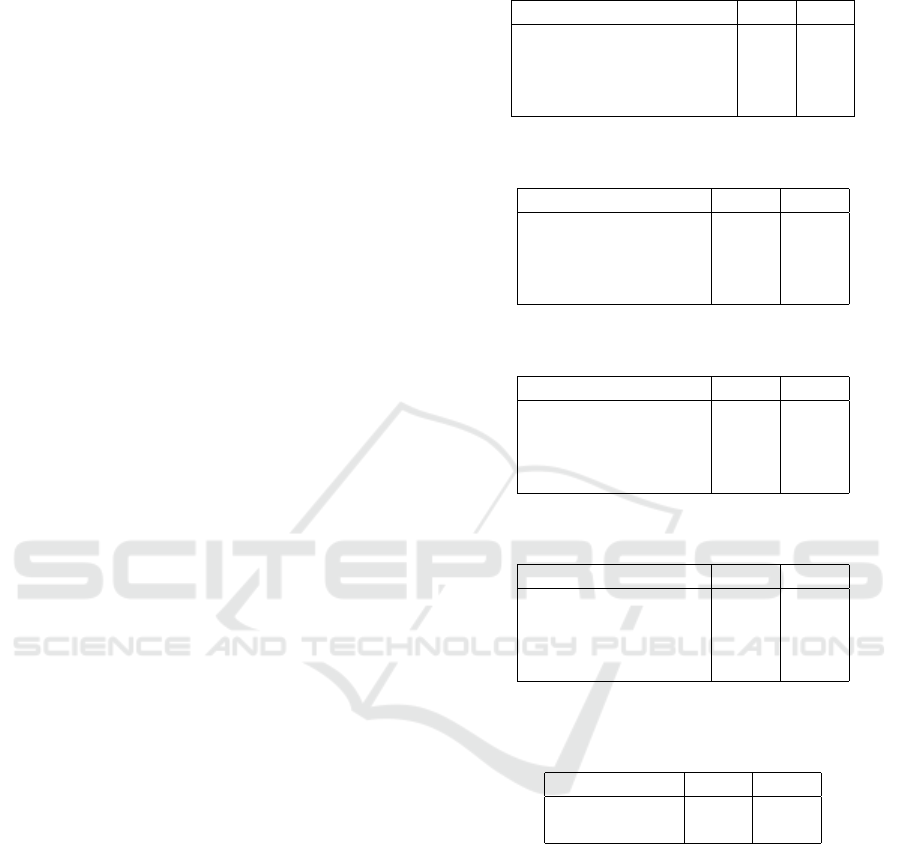
Table 1: Quantitative results of the systems against existing
methodologies which explicitly evaluate themselves on the
CMU dataset.
Methods FID Div
Two-stage GAN (Cai et al., 2017) 14.34 4.41
CondGRU (Shlizerman et al., 2017) 51.72 0.79
MoCoGAN (Tulyakov et al., 2017) 11.15 5.28
MoFusion (Dabral et al., 2023) 50.31 9.09
MotionNet (Hassan et al., 2021) 4.31 7.33
action2motion (Guo et al., 2020) 2.8 6.5
Ours 1.83 9.21
Table 2: Quantitative results of the systems against existing
methodologies which explicitly evaluate themselves on the
HumanAct12 dataset.
Methods FID Div
ACTOR (Petrovich et al., 2021) 48.8 14.1
MDM (Tevet et al., 2022) 31.92 17.00
MoDi(Raab et al., 2024) 13.03 17.57
Ours 10.11 15.33
In terms of the FID metrics, these results demon-
strate consistently superior performance of our ap-
proach compared to the state-of-the-art. In terms of
diversity, the results are still superior for the CMU
dataset, and comparable with other methods for the
HumanAct12 dataset.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
44
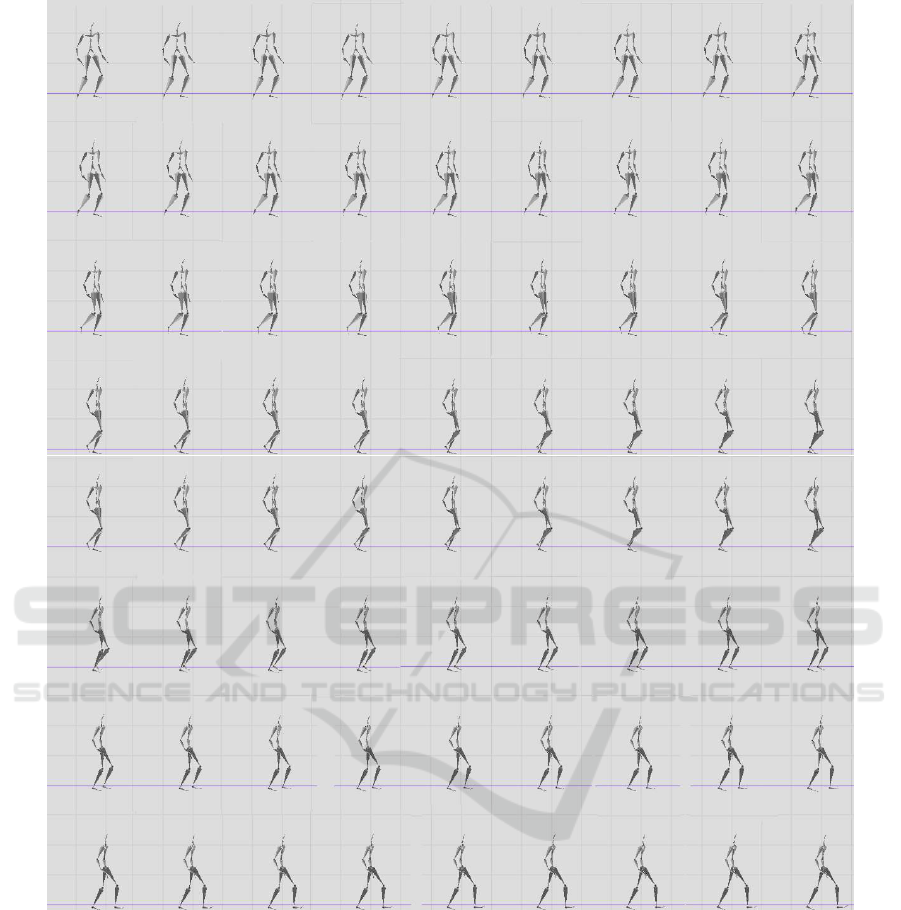
Figure 7: This shows an example of a walk sequence generated using the CMU dataset. The results should be read left to
right with the top left pose showing the first frame taken from the VAE.
4.3 Qualitative Results
The evaluation shown in Figure 7 demonstrates two
key aspects of the proposed solution: maintaining the
temporal coherence and the influence of the selected
pose on the diversity of the generated sequences.
4.3.1 Temporal Coherence
By examining the frame-by-frame breakdown in Fig-
ure 7 we can see that including AdaIN layers within
the decoder has allowed the proposed solution to learn
and maintain temporal coherence between a diverse
set of poses.
4.3.2 The Influence of Selected Pose
The sequences generated are constrained consider-
ably by the initial pose provided to the encoder. This
is evidenced by our diversity score that is comparable
but not higher than other state-of-the-art methods, as
shown in Table 2.
Pose-Centric Motion Synthesis Through Adaptive Instance Normalization
45
4.4 Ablation Study
To evaluate the efficacy of the proposed AdaIN layers,
we conducted a comprehensive ablation study focus-
ing on two key aspects:
1. Comparative analysis with recurrent architec-
tures: we investigated the impact of replacing
adaptive instance normalization with established
recurrent neural network architectures, specifi-
cally LSTM and GRU layers. This comparison
was motivated by the methodology employed in
Action2Motion (Guo et al., 2020), which repre-
sents the closest existing approach in the litera-
ture. The results, shown in Table 3, highlight that,
despite LSTM and GRU layers being capable of
producing good results, in the specific context of
a pose-centric employing an adaptive layer can re-
sult in superior results.
2. Integration with existing systems: To further val-
idate our approach, we examined the effect of in-
corporating Adaptive Instance Normalization into
existing motion synthesis frameworks. To in-
vestigate this we selected two separate frame-
works which utilize different architectures there-
fore highlighting the applicability of the proposed
approach. The first framework selected is Ac-
tion2Motion (Guo et al., 2020). This was se-
lected due to it similarly employing a VAE-based
approach to the proposed system to generate se-
quences in a pose-centric manner. The results of
retraining Action2Motion to include adaptive lay-
ers within the decoder are shown across three sep-
arate tables, Table 4, Table 5 and Table 6. We
show that employing both Lie algebra and adap-
tive layers results in superior performance. The
second framework selected is (Wen et al., 2021).
This was selected as it employs a different ar-
chitecture, in this case normalizing flow, whilst
also generating sequences in a pose-centric man-
ner. We modified this framework by incorporat-
ing the adaptive layers from our solution within
the transformation mapping employed by the au-
thors. It was subsequently trained using the orig-
inal dataset provided by them, once with adaptive
layers, and once without. The results are shown
in Table 7. These results demonstrate the versatil-
ity of integrating adaptive layers across diverse ar-
chitectures, underscoring their ability to enhance
model performance. By incorporating these lay-
ers, we observe a consistent improvement in per-
formance, highlighting their positive contribution
to the overall system efficacy.
Table 3: Ablation study on the impact of different methods
of maintaining temporal coherence.
Methods FID Div
With AIN layer 1.83 9.21
Without AIN layer 7.11 6.39
Replaced by LSTM layer 5.95 4.92
Replaced by GRU layer 4.42 5.71
Table 4: Ablation study on the impact of adaptive instance
normalization in Action2Motion for Human-Act-12.
Normalization FID Div
With AdaIN with Lie 2.151 7.115
With AdaIN w/o Lie 2.832 6.821
W/o AdaIN with Lie 2.458 7.032
W/o AdaIN w/o Lie 3.299 6.742
Table 5: Ablation study on the impact of adaptive instance
normalization in Action2Motion for CMU.
Normalization FID Div
With AdaIN with Lie 2.441 6.740
With AdaIN w/o Lie 2.712 6.210
W/o AdaIN with Lie 2.885 6.500
W/o AdaIN w/o Lie 2.994 5.790
Table 6: Ablation study on the impact of adaptive instance
normalization in Action2Motion for NTU.
Normalization FID Div
With AdaIN with Lie 0.217 7.123
With AdaIN w/o Lie 0.433 6.833
W/o AdaIN with Lie 0.350 6.926
W/o AdaIN w/o Lie 0.540 7.065
Table 7: Quantitative results of placing adaptive layers
within a system which employs normalizing flow (Wen
et al., 2021).
Normalization FID Div
With AdaIN 5.127 6.341
w/o AdaIN 7.737 5.327
5 CONCLUSION
This paper deals with the challenge of temporal co-
herence in sequences produced by pose-centric meth-
ods, so to achieve real-time motion synthesis. We pro-
pose adopting the Adaptive Instance Normalization
(AdaIN) (Huang and Belongie, 2017) within a VAE-
GAN architecture, including AdaIN layers in the de-
coder.
The inclusion of AdaIN layers leads to superior
results, in comparison to other state-of-the-art ar-
chitectures on the CMU MoCap and HumanAct12
datasets, evaluated by the FID and diversity met-
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
46

rics. We have also demonstrated that inclusion of
the proposed AdaIN layers improves the performance
of other pose-centric methods such as Action2Motion
(Guo et al., 2020) and (Wen et al., 2021) regardless
of the underlying architecture employed. Therefore, a
key strength of our proposed solution is the versatility
of the AdaIN layers and the potential to be included
in other pose-centric motion synthesis architectures.
In future work, we plan to further investigate the
potential of the AdaIN in pose-centric motion synthe-
sis, and especially focus on guided methods that will
allow the interaction of virtual characters with other
elements in computer games.
REFERENCES
Cai, H., Bai, C., Tai, Y.-W., and Tang, C.-K. (2017). Deep
video generation, prediction and completion of human
action sequences. ECCV.
Dabral, R., Mughal, M. H., and Vladislav Golyanik, C. T.
(2023). Mofusion: A framework for denoising-
diffusion-based motion synthesis. CVPR.
Goodfellow, I. J., Pouget-Abadie, J., Xu, M. M. B., Warde-
Farley, D., Ozair, S., Courville, A., and Bengio, Y.
(2014). Generative adversarial networks. neurips.
Guo, C., Zuo, X., Wang, S., Zou, S., Sun, Q., Deng, A.,
Gong, M., and Cheng, L. (2020). Action2motion:
Conditioned generation of 3d human motions. Pro-
ceedings of the 28th ACM International Conference
on Multimedia.
Hassan, M., Ceylan, D., Villegas, R., Saito, J., Yang, J.,
Zhou, Y., and Black, M. (2021). Stochastic scene-
aware motion prediction. ICCV.
Heusel, M., Unterthiner, H. R. T., Nessler, B., and Hochre-
iter, S. (2017). Gans trained by a two time-scale up-
date rule converge to a local nash equilibrium.
Huang, X. and Belongie, S. (2017). Arbitrary style trans-
fer in real-time with adaptive instance normalization.
2017 IEEE International Conference on Computer Vi-
sion (ICCV).
Kania, K., Kowalski, M., and Trzci
´
nski, T. (2021). Trajevae:
Controllable human motion generation from trajecto-
ries. arXiv preprint arXiv:2104.00351.
Li, P., Aberman, K., Zhang, Z., Hanocka, R., and Sorkine-
Hornung, O. (2022). Ganimator: Neural motion syn-
thesis from a single sequence. ACM Transactions on
Graphics.
Luo, Y., Soeseno, J. H., Chen, T. P., and Chen, W.
(2020). CARL: controllable agent with reinforce-
ment learning for quadruped locomotion. CoRR,
abs/2005.03288.
Mao, Y., Liu, X., Zhou, W., Lu, Z., and Li, H. (2024).
Learning generalizable human motion generator with
reinforcement learning.
Mourot, L., Hoyet, L., Le Clerc, F., Schnitzler, F., and Hel-
lier, P. (2021). A survey on deep learning for skeleton-
based human animation. Computer Graphics Forum,
41(1):122–157.
Petrovich, M., Black, M., and Varol, G. (2021). Action-
conditioned 3d human motion synthesis with trans-
former vae. ICCV.
PyTorch (2024). torch.nn.instancenorm1d. Accessed:
2024-06-27.
Raab, S., Leibovitch, I., Li, P., Popa, T., Aberman, K., and
Sorkine-Hornung, O. (2024). Modi: Unconditional
motion synthesis from diverse data. CVPR.
Razghandi, M., Zhou, H., Erol-Kantarci, M., and Turgut, D.
(2022). Variational autoencoder generative adversarial
network for synthetic data generation in smart home.
Ruder, M., Dosovitskiy, A., and Brox, T. (2016). Artistic
Style Transfer for Videos, page 26–36. Springer Inter-
national Publishing.
Shlizerman, E., Dery, L. M., Schoen, H., and Kemelmacher-
Shlizerman, I. (2017). Audio to body dynamics.
CVPR, IEEE Computer Society Conference on Com-
puter Vision and Pattern Recognition.
Tevet, G., Raab, S., Gordon, B., Cohen-Or, Y. S. D., and
Bermano, A. H. (2022). Human motion diffusion
model. ICLR.
Tulyakov, S., Liu, M.-Y., Yang, X., and Kautz, J. (2017).
Mocogan: Decomposing motion and content for video
generation. CVPR.
Ulyanov, D. and Vedaldi, A. (2017). Improved texture
networks: Maximizing quality and diversity in feed-
forward stylization and texture synthesis.
University, C. M. (2000). Cmu graphics lab motion cap-
ture database. https://mocap.cs.cmu.edu/. Accessed:
2024-09-15.
Wang, J., Wen, C., Fu, Y., Lin, H., Zou, T., Xue, X., and
Zhang, Y. (2020). Neural pose transfer by spatially
adaptive instance normalization. CVPR.
Wen, Y.-H., Yang, Z., Fu, H., Gao, L., Sun, Y., and Liu, Y.-J.
(2021). Autoregressive stylized motion synthesis with
generative flow.
Xu, L., Song, Z., Wang, D., Su, J., Fang, Z., Ding, C., Gan,
W., Jin, Y. Y. X., Yang, X., Zeng, W., and Wu, W.
(2022). Actformer: A gan-based transformer towards
general action-conditioned 3d human motion genera-
tion. ICCV.
Zhang, M., Guo, X., Pan, L., Cai, Z., Hong, F., Li, H.,
Yang, L., and Liu, Z. (2023). Remodiffuse: Retrieval-
augmented motion diffusion model.
Pose-Centric Motion Synthesis Through Adaptive Instance Normalization
47
