
A Mixed-Integer Programming Approach for an Extended Fixed Route
Hybrid Electric Aircraft Charging Problem
Anthony Desch
ˆ
enes
1 a
, Rapha
¨
el Boudreault
2 b
, Jonathan Gaudreault
1 c
and
Claude-Guy Quimper
1 d
1
Department of Computer Science and Software Engineering, Universit
´
e Laval, Qu
´
ebec, Canada
2
Thales, Qu
´
ebec, Canada
Keywords:
Energy Management, Hybrid Electric Aircraft, Air Mobility, Mixed-Integer Programming, Dynamic
Programming, Optimization, FRHACP.
Abstract:
Air mobility is rapidly transitioning towards hybrid electric aircraft. In the context of multi-flight missions,
aircraft operators will need to consider numerous infrastructure and operational constraints in their planning,
where predicting energy usage is critical. This problem is introduced in previous work as the Fixed Route Hy-
brid Electric Aircraft Charging Problem (FRHACP) and a Dynamic Programming (DP) approach is proposed.
It consists of deciding a cost-optimal charging, refueling, and hybridization strategy for a given aircraft route.
In this paper, we introduce an extended version of this problem with additional constraints and soft schedule
requirements. We then propose a Mixed-Integer Programming (MIP) approach to solve it and compare its per-
formance against an updated DP approach on a benchmark of 10 realistic instances. Results demonstrate that
MIP consistently produces superior solutions than DP, both with and without gradient descent post-treatment,
achieving average cost reductions of 145$ (1.7%) and 377$ (4.3%), respectively. However, it increases on
average the solving time. We finally discuss the benefits and drawbacks of both approaches, with a particular
emphasis on the scalability of DP through additional experiments.
1 INTRODUCTION
Historically, air transportation has heavily relied on
aircraft propelled by combustion engines that utilize
non-renewable fossil fuels. However, in the past
years, there has been a growing interest in explor-
ing alternative propulsion systems aiming to reduce
greenhouse gas emissions from aviation. For that pur-
pose, electric-powered aircraft, including hybrid elec-
tric aircraft combining internal combustion engines
with electric power sources, have been proposed. It is
anticipated that these aircraft will play a crucial role
in the future of air transportation, operating across a
variety of multi-flight missions, including on-demand
services of varying length and duration (Ansell and
Haran, 2020).
Nevertheless, the adoption of electric propulsion
a
https://orcid.org/0000-0002-6670-6837
b
https://orcid.org/0000-0002-5602-7515
c
https://orcid.org/0000-0001-5493-8836
d
https://orcid.org/0000-0002-5899-0217
introduces several complex challenges. Beyond flight
path planning, effectively managing energy consump-
tion throughout entire missions is critical. This in-
cludes considering aircraft specifications, infrastruc-
ture availability, security requirements, and schedul-
ing priorities. Such considerations are particularly
important from a planning standpoint given the cur-
rent non-negligible and non-linear duration of elec-
tricity charging (Desch
ˆ
enes et al., 2022; Montoya
et al., 2017). Operators must make informed deci-
sions regarding refueling and charging at each mis-
sion terminal. Additionally, the consideration of hy-
bridization introduces decisions on the energy source
to use (electricity and/or fuel) during each flight
leg. These decisions require consumption predictions
from non-linear energy models depending among oth-
ers on vehicle characteristics, speed, mass, and tem-
perature (Sun et al., 2020; De Cauwer et al., 2017;
Ansarey et al., 2014; Desch
ˆ
enes et al., 2020a). Ul-
timately, the main goal for operators is to minimize
overall mission costs by ensuring efficient energy uti-
lization.
22
Deschênes, A., Boudreault, R., Gaudreault, J. and Quimper, C.-G.
A Mixed-Integer Programming Approach for an Extended Fixed Route Hybrid Electric Aircraft Charging Problem.
DOI: 10.5220/0013103400003893
In Proceedings of the 14th Inter national Conference on Operations Research and Enterprise Systems (ICORES 2025), pages 22-31
ISBN: 978-989-758-732-0; ISSN: 2184-4372
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

In previous work by (Desch
ˆ
enes et al., 2023),
this problem is introduced as the Fixed Route Hybrid
Electric Aircraft Charging Problem (FRHACP) and
a DP approach is proposed. In this paper, we intro-
duce an extended version of this problem with addi-
tional constraints and soft schedule requirements and
propose a MIP approach to solve it. Section 2 re-
calls the FRHACP definition. Section 3 introduces
the extended problem and relates it to its original for-
mulation. Section 4 presents how we update the DP
approach for the extended problem, while the pro-
posed MIP model is outlined in Section 5. The two
approaches are evaluated and compared in Section 6
on a benchmark of 10 realistic instances, followed by
a conclusion suggesting directions for future work.
In summary, the contributions of this paper are the
following:
• A new extension of the FRHACP with additional
constraints and a soft schedule;
• An updated DP approach that solves this extended
problem;
• A new MIP model that solves this extended prob-
lem to optimality;
• A comparative analysis of the approaches’ solu-
tions and their computation time on a benchmark
of 10 realistic instances;
• A scalability analysis of the proposed approaches
on larger instances.
2 THE FIXED ROUTE HYBRID
ELECTRIC AIRCRAFT
CHARGING PROBLEM
(FRHACP)
The FRHACP is introduced by (Desch
ˆ
enes et al.,
2023). It consists of deciding a cost-optimal charg-
ing, refueling and hybridization strategy for a given
aircraft route in a multi-flight mission setting. For-
mally, a mission is defined as a fixed route r
:
=
(n
1
,n
2
,...,n
|N |
) of successive nodes n
i
∈ N . Each
node from the route is either a terminal from set
T or a waypoint from set W (N
:
= T ∪ W ), with
n
1
,n
|N |
∈ T . A terminal is typically an airport, where
facilities are available to refuel and charge the aircraft.
Between consecutive terminals, the route is defined
by waypoints, typically reference points in the air that
must be part of the aircraft trajectory. Legs are de-
fined as the route segments connecting two consecu-
tive nodes, with L
:
= {(n
i
,n
i+1
) : i = 1, . . . , |N | − 1}.
The FRHACP asks to decide how much to refuel
and charge the aircraft at each terminal. These de-
Table 1: Parameters required by an instance of the
FRHACP.
Parameter
Description
s
1
Initial state of charge at the origin (%).
f
1
Initial fuel quantity at the origin (L).
t
1
Initial time at the origin (h).
s
min
Minimal state of charge (%).
s
max
Maximal state of charge (%).
f
min
Minimal fuel quantity (L).
f
max
Maximal fuel quantity (L).
t
D
τ
Scheduled departure time at terminal τ ∈ T
(h).
α
s
τ
(s
1
,s
2
)
Function of the time to charge (h) from
state of charge s
1
(%) to s
2
(%) at termi-
nal τ ∈ T , defined for s
1
≥ s
2
.
α
f
Refueling rate of the aircraft (L/h).
m
f
Fuel mass (kg/L).
m
a
Empty aircraft mass (kg).
m
p
l
Payload mass on leg l ∈ L (kg).
d
l
Travel distance on leg l ∈ L (km).
v
l
Aircraft speed on leg l ∈ L (km/h).
δ
s
l
(d,m)
Function of the electricity consumption
(%) given the distance d (km) and the mass
m (kg) on leg l ∈ L.
δ
f
l
(d,m)
Function of the fuel consumption (L) given
the distance d (km) and the mass m (kg) on
leg l ∈ L.
c
s
τ
Electricity cost at terminal τ ∈ T ($/%).
c
f
τ
Fuel cost at terminal τ ∈ T ($/L).
cisions are limited by security margins, physical ca-
pacity, and hard schedule constraints on the depar-
ture time. The time needed to charge the aircraft bat-
tery at a terminal is encoded as a function dependent
on the initial and final states of charge, usually non-
linear (Desch
ˆ
enes et al., 2022; Montoya et al., 2017),
while the refueling duration is given by a constant
rate. Hybridization decisions on the energy source to
use (electricity and/or fuel) during each leg is encoded
as the traveled distance using fuel first. This is based
on the hypotheses that fuel has a non-negligible mass,
which is an important non-linear factor in energy con-
sumption prediction (Sun et al., 2020; De Cauwer
et al., 2017; Ansarey et al., 2014; Desch
ˆ
enes et al.,
2020a), and that using fuel first is the optimal en-
ergy management strategy on a leg (Pinto Leite and
Voskuijl, 2020). Thus, fuel and electricity consump-
tion models are encoded as functions dependent on
the traveled distance and the total mass. These may
include other physical parameters, such as speed, al-
titude, and trajectory angle, but are assumed constant
on a given leg. In summary, a FRHACP instance re-
quires the parameters listed in Table 1.
The FRHACP can naturally be seen as an adap-
tation of the Fixed Route Electric Vehicle Charging
Problem (FRVCP), introduced by (Montoya et al.,
A Mixed-Integer Programming Approach for an Extended Fixed Route Hybrid Electric Aircraft Charging Problem
23

2017), to the context of hybrid electric aircraft. This
problem has been extended with non-linear energy
management by (Desch
ˆ
enes et al., 2020b), and MIP
approaches have been proposed to solve both for-
mulations. In fact, the FRVCP can be seen as a
sub-problem of the Electric Vehicle Routing Prob-
lem (EVRP) introduced by (Lin et al., 2016). Their
work highlights that payload, and consequently ve-
hicle mass, has a significant impact on energy con-
sumption of electric vehicles. The EVRP has also
been extended to handle hybrid electric vehicles, with
mainly MIP approaches used to solve the new prob-
lems (Mancini, 2017; Seyfi et al., 2022; Zhen et al.,
2020), as well as heuristics (Seyfi et al., 2022; Zhen
et al., 2020; Yu et al., 2017).
3 THE EXTENDED FRHACP
We now introduce an extension of the FRHACP de-
scribed in Section 2. The main difference lies in the
schedule management, where now the mission sched-
ule satisfaction is encoded as soft constraints on the
arrival and departure times at each terminal. Thus,
in the new problem, time is an additional dimension
to consider, while monetary costs are associated on
the deviation from the given scheduled times. Fur-
thermore, it now allows a decision of waiting, i.e. to
perform other tasks than charging and refueling at a
terminal, which can be constrained (e.g., for main-
tenance purposes). A maximal charging duration and
fuel availability can be specified as constraints at each
terminal, while the availability of charging/refueling
facilities can also vary. Finally, in this extended prob-
lem, a specific source of energy to use can be enforced
on a given leg (e.g., to enforce that taxi phases use
electricity). Table 2 presents the additional param-
eters required by an extended FRHACP instance as
well as the value each parameter needs to obtain an
original FRHACP instance.
4 UPDATED DYNAMIC
PROGRAMMING AND
HEURISTICS APPROACHES
(Desch
ˆ
enes et al., 2023) propose a DP algorithm to
solve the FRHACP, which minimizes fuel consump-
tion and is optimal under certain assumptions, includ-
ing one that requires that fuel costs are the same at
each terminal. To relax this assumption, they propose
a gradient descent post-treatment that keeps the opti-
mality when fuel costs vary, DP+GD. They also pro-
Table 2: Additional parameters required by an instance of
the extended FRHACP and their value needed to obtain an
instance of FRHACP.
Parameter
Description
Value
t
A
τ
Scheduled arrival time at terminal τ ∈
T (h).
N/A
c
<t
A
τ
Cost of arriving earlier than the sched-
uled arrival time at terminal τ ∈ T
($/h).
N/A
c
>t
A
τ
Cost of arriving later than the sched-
uled arrival time at terminal τ ∈ T
($/h).
N/A
c
<t
D
τ
Cost of departing earlier than the
scheduled departure time at terminal
τ ∈ T ($/h).
∞
c
>t
D
τ
Cost of departing later than the sched-
uled departure time at terminal τ ∈ T
($/h).
∞
∆t
wait,min
τ
Minimal waiting duration at terminal
τ ∈ T (h).
0
∆t
s,max
τ
Maximal charging duration at termi-
nal τ ∈ T (h).
∞
∆ f
max
τ
Available fuel quantity at terminal τ ∈
T (L).
∞
can
s
τ
1 if we can charge at terminal τ ∈ T ,
else 0.
1
can
f
τ
1 if we can refuel at terminal τ ∈ T ,
else 0.
1
allowed
s
l
1 if we can use electricity on leg l ∈ L,
else 0.
1
allowed
f
l
1 if we can use fuel on leg l ∈ L, else
0.
1
posed two heuristics: one that prioritizes fuel usage,
Fuel First (FF-H), and one that greedily prioritizes
electricity usage by always burning the fuel before
using the electricity to minimize the aircraft weight
when using the electricity, Maximum Battery Usage
(MB-H). Formal descriptions of the DP algorithms
and the heuristics are provided by (Desch
ˆ
enes et al.,
2023). To solve the extended FRHACP introduced in
Section 3, we update their DP approach. The modifi-
cations and new assumptions are as follows:
• Soft schedule is not handled. Scheduled times are
thus strictly considered as in the FRHACP;
• Minimal waiting and maximal charging durations
are handled when constructing the route solution;
• Available fuel quantities are ensured by limiting
the recurrence returned value. Since DP mini-
mizes the fuel usage, this handles the majority of
cases. Degenerated cases would cause unfeasibil-
ity;
• Availability of charging/refueling facilities is di-
rectly handled by the two above items;
• Enforced energy source usage on legs is handled
by fixing the tested hybridization decisions to ei-
ther fully electric or fully fuel.
ICORES 2025 - 14th International Conference on Operations Research and Enterprise Systems
24

As a result, hypotheses for optimality no longer hold,
and the solutions produced by the DP approach, with
or without the gradient descent post-treatment, are
no longer guaranteed to be optimal. With a simi-
lar reasoning, the heuristics Fuel First and Maximum
Battery Usage, can be updated to solve the extended
FRHACP.
The DP approach depends on two hyperparame-
ters: the number of sampled states of charge to create
the interpolations, ˜s, and the number of tested distance
decisions for the hybridization,
˜
h. It has been shown
that both of these hyperparameters have a linear im-
pact on its running time (Desch
ˆ
enes et al., 2023).
5 PROPOSED MIXED-INTEGER
PROGRAMMING MODEL
This section outlines the proposed MIP model in our
approach to solve the extended FRHACP described in
Section 3.
5.1 Variables
As for the FRHACP, the main decision variables for
the extended problem are related to the charging and
refueling durations/quantities at each terminal. In ad-
dition, new variables are related to the waiting dura-
tion at each terminal in order to handle soft schedule
requirements and time constraints. Finally, hybridiza-
tion is still encoded via traveled distance using each
energy source. These variables, as well as interme-
diate variables used by the MIP model, are presented
in Table 3 along with their initial domain based on
parameters from Tables 1 and 2.
5.2 Objective
The objective is to minimize the total cost of the
multi-flight mission. It includes energy-related costs
(charging and refueling), as in the FRHACP, but also
costs induced by deviation from the scheduled arrival
and departure times:
min
∑
τ∈T
h
c
s
τ
(S
D
τ
− S
A
τ
) + c
f
τ
(F
D
τ
− F
A
τ
)
+C
<t
A
τ
+C
>t
A
τ
+C
<t
D
τ
+C
>t
D
τ
i
.
5.3 Constraints
The constraints of the MIP model are presented be-
low. We use M as a sufficiently large constant. Con-
Table 3: Variables of the MIP model and their initial do-
main.
Variable Domain
Description
∆T
s
τ
[0,∆t
s,max
τ
]
Charging duration at terminal
τ ∈ T (h).
∆T
f
τ
[0,
1
α
f
· ∆ f
max
τ
]
Refueling duration at termi-
nal τ ∈ T (h).
∆T
wait
τ
[∆t
wait,min
τ
,∞]
Waiting duration at terminal
τ ∈ T (h).
D
s
l
[0,d
l
]
Traveled distance using elec-
tricity on leg l ∈ L (km).
D
f
l
[0,d
l
]
Traveled distance using fuel
on leg l ∈ L (km).
S
A
n
[s
min
,s
max
]
Arrival state of charge at
node n ∈ N (%).
S
D
n
[s
min
,s
max
]
Departure state of charge at
node n ∈ N (%).
F
A
n
[ f
min
, f
max
]
Arrival fuel quantity at node
n ∈ N (L).
F
D
n
[ f
min
, f
max
]
Departure fuel quantity at
node n ∈ N (L).
M
s
l
[m
a
,∞]
Mass of the aircraft when us-
ing electricity on leg l ∈ L
(kg).
M
f
l
[m
a
,∞]
Mass of the aircraft when us-
ing fuel on leg l ∈ L (kg).
∆T
s
l
[0,
d
l
/v
l
]
Traveled duration using elec-
tricity on leg l ∈ L (h).
∆T
f
l
[0,
d
l
/v
l
]
Traveled duration using fuel
on leg l ∈ L (h).
T
A
n
[t
1
,∞]
Arrival time at node n ∈ N
(h).
T
D
n
[t
1
,∞]
Departure time at node
n ∈ N (h).
C
<t
A
τ
[0,∞]
Total cost for arriving early at
terminal τ ∈ T ($).
C
>t
A
τ
[0,∞]
Total cost for arriving late at
terminal τ ∈ T ($).
C
<t
D
τ
[0,∞]
Total cost for departing early
at terminal τ ∈ T ($).
C
>t
D
τ
[0,∞]
Total cost for departing late
at terminal τ ∈ T ($).
straints (1) set the initial conditions at the first termi-
nal n
1
∈ T .
S
A
n
1
= s
1
, F
A
n
1
= f
1
, T
A
n
1
= t
1
(1)
Constraints (2) define the relationship between the
states of charge and the charging duration at a termi-
nal, while constraints (3) allow charging only if fa-
cilities are available. Similarly, constraints (4) ensure
that the refueling duration at a terminal is proportional
to the aircraft refueling rate, while constraints (5) al-
A Mixed-Integer Programming Approach for an Extended Fixed Route Hybrid Electric Aircraft Charging Problem
25

low refueling only if facilities are available.
∆T
s
τ
= α
s
τ
(S
A
τ
,S
D
τ
) ∀τ ∈ T (2)
∆T
s
τ
≤ M · can
s
τ
∀τ ∈ T (3)
∆T
f
τ
=
1
α
f
(F
D
τ
− F
A
τ
) ∀τ ∈ T (4)
∆T
f
τ
≤ M · can
f
τ
∀τ ∈ T (5)
By assumption, constraints (6) enforce that charging,
refueling, and waiting are not allowed at any way-
point.
S
D
w
= S
A
w
, F
D
w
= F
A
w
, T
D
w
= T
A
w
∀w ∈ W (6)
To encode the hybridization decisions on each flight
leg, constraints (7) to (9) define the relationship be-
tween distance and duration variables according to
given distance and speed. Additionally, the ability to
use electricity and/or fuel on a leg is encoded via con-
straints (10) and (11).
D
s
l
= v
l
∆T
s
l
∀l ∈ L (7)
D
f
l
= v
l
∆T
f
l
∀l ∈ L (8)
∆T
s
l
+ ∆T
f
l
=
d
l
v
l
∀l ∈ L (9)
(1 − allowed
s
l
)∆T
s
l
≤ 0 ∀l ∈ L (10)
(1 − allowed
f
l
)∆T
f
l
≤ 0 ∀l ∈ L (11)
Constraints (12) define the mass of the aircraft at the
start of each leg according to its initial fuel quantity.
Then, after using the fuel first with this mass, con-
straints (13) compute the updated mass of the aircraft
according to its final fuel quantity to be considered for
the electric part of the leg.
M
f
l
i
= m
a
+ m
p
l
i
+ m
f
F
D
n
i
∀l
i
:
= (n
i
,n
i+1
) ∈ L
(12)
M
s
l
i
= m
a
+ m
p
l
i
+ m
f
F
A
n
i+1
∀l
i
:
= (n
i
,n
i+1
) ∈ L
(13)
Constraints (14) and (15) define the variation in state
of charge and fuel quantity, from a leg departure node
to its arrival node, originating from energy consump-
tion.
S
A
n
i+1
= S
D
n
i
− δ
s
l
i
(M
s
l
i
,D
s
l
i
),
∀l
i
:
= (n
i
,n
i+1
) ∈ L
(14)
F
A
n
i+1
= F
D
n
i
− δ
f
l
i
(M
f
l
i
,D
f
l
i
)
∀l
i
:
= (n
i
,n
i+1
) ∈ L
(15)
Constraints (16) encode the departure time from a ter-
minal, which is defined by the arrival time, the charg-
ing and refueling durations, and the waiting duration.
Constraints (17) encode the arrival time at a node ac-
cording to its incoming leg duration.
T
D
τ
= T
A
τ
+ ∆T
s
τ
+ ∆T
f
τ
+ ∆T
wait
τ
∀τ ∈ T (16)
T
A
n
i+1
= T
D
n
i
+
d
l
i
v
l
i
∀l
i
:
= (n
i
,n
i+1
) ∈ L (17)
Finally, constraints (18) to (21) relate the schedule
costs to their associated time variable.
C
<t
A
τ
≥ c
<t
A
τ
(t
A
τ
− T
A
τ
) ∀τ ∈ T (18)
C
>t
A
τ
≥ c
>t
A
τ
(T
A
τ
−t
A
τ
) ∀τ ∈ T (19)
C
<t
D
τ
≥ c
<t
D
τ
(t
D
τ
− T
D
τ
) ∀τ ∈ T (20)
C
>t
D
τ
≥ c
>t
D
τ
(T
D
τ
−t
D
τ
) ∀τ ∈ T (21)
5.4 Function Linearizations
Following the methodology of (Desch
ˆ
enes et al.,
2020b), the non-linear charging functions α
s
τ
(s
1
,s
2
)
are approximated using multiple linear functions that
each add a binary variable to the model, for each ter-
minal τ ∈ T .
The non-linear electricity and fuel consumption
functions, δ
s
l
(d,m) and δ
f
l
(d,m), both depend on dis-
tance and mass decisions. We approximate these mul-
tidimensional functions in the MIP model using the
method of (Misener and Floudas, 2010), which de-
pends on a grid sampling. This leads to two hyper-
parameters: the number of points in the grid for the
distance dimension,
˜
d, and for the mass dimension,
˜m. The approximation adds
˜
d + ˜m binary variables
for each leg l ∈ L. It is known that the finer the grid,
the better approximations will be, but harder it will be
to solve.
6 EXPERIMENTS
The main objective of the experiments is to compare
the proposed MIP approach from Section 5 with the
updated DP approach from Section 4, in terms of
solving time and solution quality. This aims at evalu-
ating the benefits and drawbacks of each approach.
6.1 Experimental Setup
We implemented the MIP model from Section 5 in
the MiniZinc 2.8.3 language (Nethercote et al., 2007)
and used CPLEX 22.1 for solving, with an optimal
relative gap setting of 1e−10. Based on the meth-
ods of (Desch
ˆ
enes et al., 2023), we implemented in
Python 3.11 the updated DP, its gradient descent post-
treatment (DP+GD), and the heuristics (FF-H, MB-H)
ICORES 2025 - 14th International Conference on Operations Research and Enterprise Systems
26

Table 4: Description of the ten instances forming the
dataset.
Instance |T | |W | Duration
Distance
(km)
c
s
($/kWh)
c
f
($/L)
PN 4 59 4h30 2740 0.1397 1.46
TB 5 42 6h42 2812 0.1397 1.46
MS 6 30 7h22 2294 0.0533 [1.16, 1.25]
OT 7 43 9h34 4709 [0.0533, 0.1140] [1.03, 1.28]
KT 7 47 10h45 5165 [0.0776, 0.1408] [1.13, 1.38]
ST 6 52 13h10 6788 [0.0898, 0.1234] [1.03, 1.37]
TV 6 64 14h36 8493 [0.0976, 0.1408] [1.13, 1.44]
SK 7 107 16h33 9456 [0.0533, 0.1408] [1.16, 1.44]
BK 10 72 16h46 8143 [0.0590, 0.1408] [1.13, 1.44]
VT 5 49 11h17 5886 [0.0776, 0.1408] [1.26, 1.41]
as described in Section 4. The experiments were per-
formed on an Intel Core i7-8750H CPU @ 2.20 GHz,
6 cores and 8 GB of RAM. In order to compare each
method on the same basis, a simulation using the
non-approximated functions is always performed as
a post-treatment. Additionally, the MIP performs en-
ergy quantity corrections after the simulation to re-
duce its approximation errors and stay as close as pos-
sible to its original optimal solution.
6.2 Dataset
Our dataset consists of the four real-life inspired in-
stances from (Desch
ˆ
enes et al., 2023), which were
created from day-long sequences of aircraft commer-
cial flights in Canada and France. Following a simi-
lar instance construction methodology, we augmented
this dataset with six new instances (KT, ST, TV, SK, BK,
and VT) inspired by real commercial flights in Canada.
The resulting dataset is summarized in Table 4. Note
that all costs are presented in CAD ($). With the new
instances, the number of terminals now varies from 4
to 10, with a number of waypoints between 30 and
107, and a traveled distance of up to 9456 km.
All instances suppose a Cessna S550 Citation II
as the aircraft, which is augmented with a battery of
216 kWh, and has the specifications from (Desch
ˆ
enes
et al., 2023). It relies on the OpenAP aircraft perfor-
mance model (Sun et al., 2020) to predict the energy
consumption as functions δ
s
l
(d,m) and δ
f
l
(d,m), us-
ing the fixed parameters of leg l ∈ L. Since Ope-
nAP doesn’t handle consumption predictions while
taxiing, we suppose the associated legs are fully elec-
tric and use instead a physical model for electric ve-
hicles (De Cauwer et al., 2017). For the charging
functions α
s
τ
(s
1
,s
2
), it uses for all terminals τ ∈ T the
non-linear charging function from (Desch
ˆ
enes et al.,
2020b), approximated for the MIP by six linear func-
tions minimizing the error in its exponential part.
Additionally, we suppose the following parame-
ters for the extended FRHACP. We fix the sched-
uled arrival times using the departure times and the
planned durations. The soft schedule costs are fixed
for all terminals τ ∈ T to c
<t
A
τ
= 0.25$/min and
c
>t
A
τ
= 20$/min. Some terminals do not have elec-
tricity charging stations, while every taxi leg is forced
to be traveled using only electricity. For this bench-
mark, remaining parameters are set in a way that they
do not incur additional constraints.
6.3 Hyperparameters Optimization
Both MIP and DP have hyperparameters, affecting the
solving time and the quality of the solution, that must
be chosen. To ensure a fair comparison between the
approaches, these hyperparameters should be selected
using an objective methodology. Otherwise, manu-
ally selecting hyperparameters could lead to biased
conclusions. Therefore, we split the dataset in a train-
ing set and a test set. The training set is used to deter-
mine a good combination of hyperparameters, while
the test set is used to compute the results. In order
to obtain a representative training set, we choose the
instances with the most and least terminals and way-
points, i.e. PN, MS, SK, and BK. The test set contains
the remaining six instances.
For each combination of hyperparameters, we run
the approach (MIP or DP) on all instances of the train-
ing set. We then compute the average total cost and
solving time over all training instances. Note that,
for both approaches, we exclude from the solving
time the calls to OpenAP. Finally, we generate Pareto
fronts containing all compromises between the total
cost and the solving time. Using the distance from the
ideal point algorithm (Ehrgott and Tenfelde-Podehl,
2003), a combination of hyperparameters is chosen
for each approach.
The MIP approach has two hyperparameters,
˜
d
and ˜m, as presented in Section 5.4. For both, we tested
values ranging from 2 to 10, for a total of 81 combi-
nations. Figure 1 presents the resulting Pareto front.
The chosen combination of hyperparameters is point
J, with (
˜
d, ˜m) = (2,4).
The DP approach has two hyperparameters, ˜s and
˜
h, as presented in Section 4. For both, we tested val-
ues ranging from 10 to 100 with a step of 10, for a
total of 100 combinations. Figure 2 presents the re-
sulting Pareto front. The chosen combination of hy-
perparameters is point E, with ( ˜s,
˜
h) = (40, 40).
6.4 Results
Table 5 presents the results of our experiments on the
test set. For each method (DP, DP+GD, MIP, FF-H,
MB-H) and each instance, we report the solving time
A Mixed-Integer Programming Approach for an Extended Fixed Route Hybrid Electric Aircraft Charging Problem
27
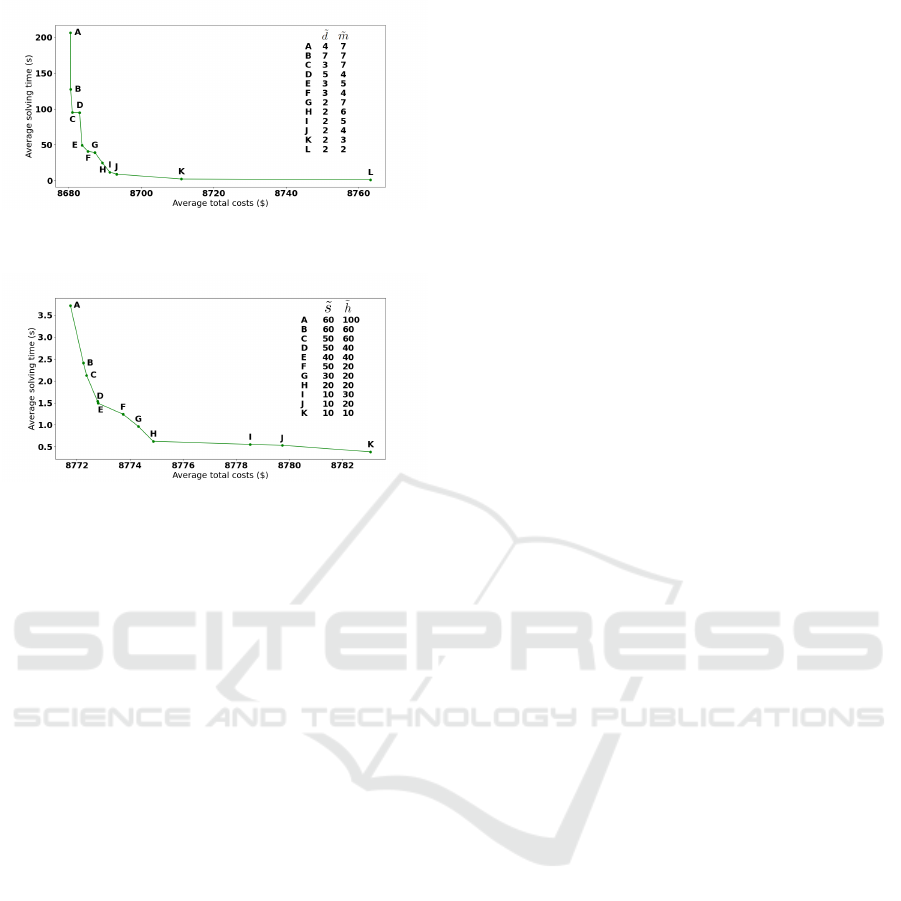
Figure 1: Resulting Pareto front for the MIP approach on
the training set with tested hyperparameter combinations.
Figure 2: Resulting Pareto front for the DP approach on the
training set with tested hyperparameter combinations.
as well as costs and consumed quantities of each en-
ergy source. The solving time is computed over 30
runs with a 95% confidence interval. We also dis-
tinguish the solving time of the algorithms (Internal)
from the calls to OpenAP (External) since OpenAP
can take a considerable amount of time to compute its
predictions. The fuel costs do not vary in instance TB,
thus the DP+GD method is omitted due to returning
the same solution as DP.
For the solving time, we observe that MIP has on
average a statistically lower total solving time com-
pared to DP and DP+GD. However, DP and DP+GD
have on average a statistically lower internal solving
time than MIP, meaning that most of the time of these
methods is inside external calls to OpenAP. This ex-
ternal time could a priori be reduced by using caching
techniques or different external models. Thus, we can
conclude that DP and DP+GD have globally a smaller
solving time than MIP.
For the costs, we observe that MIP has the small-
est total cost for all instances. Compared to DP, its
total cost is on average 376.82$ (4.31%) smaller, with
a difference going from 53.94$ (1.17%) to as much
as 692.44$ (7.39%). Compared to DP+GD, its to-
tal cost is on average 144.96$ (1.67%) smaller, with
a difference going from 17.80$ (0.28%) to 502.78$
(5.37%). Compared to the heuristics, MIP is on
average 695.05$ (8.75%) smaller than MB-H and
1135.91$ (14.68%)) smaller than FF-H, with a max-
imum reduction of 1443.75$ (22.62%). For all in-
stances, the cost reduction mainly comes from a
greater electricity usage, with an increased electric-
ity consumption and costs, to allow for a smaller
fuel consumption. We also observe that, for most in-
stances, MIP has larger schedule costs, implying that
its higher electricity usage also comes from taking ad-
vantage of the soft schedule. Notably, it tends to ar-
rive earlier at terminals in order to increase its avail-
able charging time.
The MIP method always has the greatest electric-
ity consumption of all the methods. This allows to
reduce the fuel consumption on average by 119.2 L
(1.79%) in comparison with DP+GD, with a reduction
of up to 680.4 L (11.79%) compared to FF-H which
focuses on using fuel as much as possible. Further-
more, DP has a smaller fuel consumption than MIP
for two instances: OT (88.6 L, 1.58%) and ST (122.4
L, 1.39%). Thus, the optimal solution minimizing to-
tal costs is, for some instances, not always the solution
that minimizes the fuel consumption.
6.5 Scalability Analysis
We tested the scalability of the proposed approaches
by conducting an experimentation where the size of
instances was artificially increased to a given number
of terminals. For any instance, we can increase its
size by appending at its end the same flights again up
to any terminal in the instance. For example, instance
PN with 4 terminals could be increased to 8 terminals
by doing all the flights in its route twice. Thus, for
all instances in the test set, we increased their size to
10, 15, 20, and 25 terminals and computed the av-
erage total solving time of each method with a com-
putation timeout of 54 hours. Figure 3 presents the
results as a semi-log plot of the average total solving
time of each method given the number of terminals.
We observe that MIP can only solve instances of up
to 15 terminals in less than 20 minutes. In contrast,
DP and DP+GD clearly show a smaller increase in
solving time as the number of terminals increase and
thus scale better than the MIP approach. DP shows a
linear trend with a R
2
of 0.99. This is expected since
(Desch
ˆ
enes et al., 2023) show that its time complex-
ity is pseudo-linear with the number of nodes in the
instance, which is directly proportional to the number
of terminals. However, DP+GD shows an exponen-
tial trend with a R
2
of 0.99. This can be explained
by the fact that the gradient descent post-treatment
can take an exponential time to converge. Similarly,
MIP clearly shows an exponential trend with a R
2
of
0.95 with an average total solving time higher than
DP and DP+GD for 15 terminals and above. The MIP
method on TB with 25 terminals reached the computa-
tion timeout of 54 hours with a relative gap of 0.14%.
ICORES 2025 - 14th International Conference on Operations Research and Enterprise Systems
28
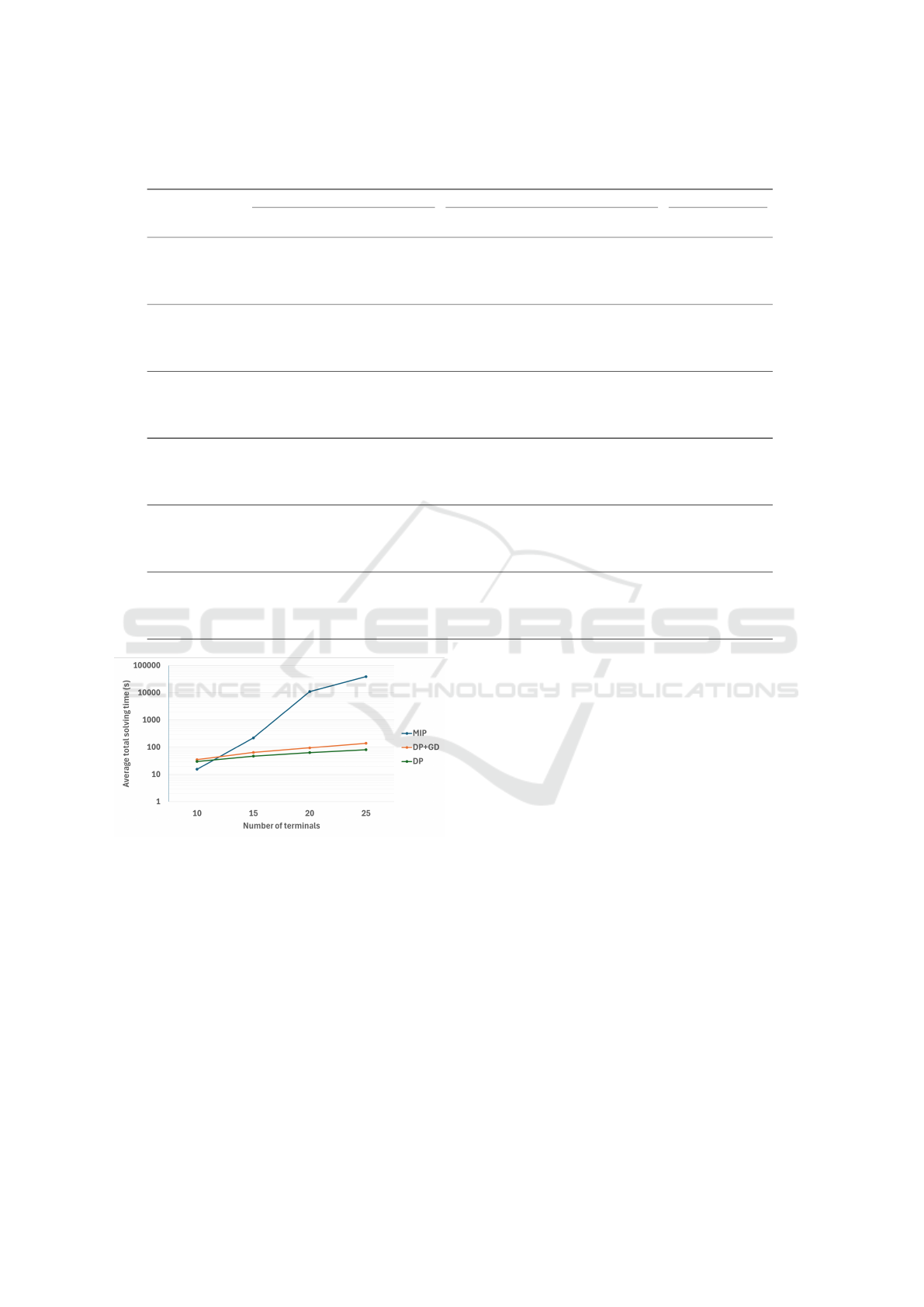
Table 5: Solving time of each instance in seconds — distinguished between internal (algorithms) and external (OpenAP) time
— as well as costs and consumed quantities of energy. Results reported for the DP, DP+GD, MIP, FF-H, and MB-H methods.
Instance Method
Solving time (s) Costs ($) Consumption
Internal External Total Fuel Electricity Schedule Total
Fuel
(L)
Electricity
(kWh)
TB
DP 0.63 ± 0.06 12.02 ± 0.48 12.65 ± 0.53 4517.18 142.25 0.77 4660.20 3117.2 683.1
DP+GD - - - - - - - - -
MIP 4.42 ± 0.38 0.04 ± 0.00 4.46 ± 0.38 4448.19 152.85 5.21 4606.25 3066.8 732.2
FF-H 0.00 ± 0.00 0.09 ± 0.01 0.08 ± 0.00 5421.53 0.78 0.77 5422.08 3739.8 3.4
MB-H 0.02 ± 0.01 0.67 ± 0.03 0.69 ± 0.03 4817.62 124.51 0.77 4942.90 3319.5 572.2
OT
DP 0.66 ± 0.10 13.68 ± 0.59 14.34 ± 0.67 6577.00 94.67 3.22 6674.89 5533.3 1070.4
DP+GD 0.82 ± 0.07 16.36 ± 0.55 17.18 ± 0.59 6301.30 94.66 3.22 6399.18 5648.1 1070.4
MIP 1.68 ± 0.32 0.03 ± 0.00 1.71 ± 0.32 6280.22 96.88 4.28 6381.38 5621.9 1096.7
FF-H 0.00 ± 0.00 0.09 ± 0.01 0.09 ± 0.01 7821.26 0.65 3.22 7825.14 6540.4 6.8
MB-H 0.03 ± 0.01 0.80 ± 0.03 0.83 ± 0.03 7277.74 84.47 3.22 7365.44 5853.0 937.7
KT
DP 0.72 ± 0.11 15.31 ± 1.45 16.04 ± 1.54 7994.60 90.35 0.92 8085.87 6389.5 908.1
DP+GD 1.00 ± 0.15 18.19 ± 1.79 19.19 ± 1.90 7795.95 89.54 0.92 7886.41 6428.2 902.4
MIP 6.85 ± 0.26 0.04 ± 0.00 6.89 ± 0.26 7643.36 105.16 11.95 7760.47 6296.5 1039.1
FF-H 0.00 ± 0.00 0.10 ± 0.01 0.10 ± 0.01 9011.19 0.52 0.92 9012.63 7193.5 4.7
MB-H 0.04 ± 0.01 1.16 ± 0.03 1.20 ± 0.03 8304.79 73.99 0.92 8379.70 6636.8 723.6
ST
DP 0.87 ± 0.08 18.00 ± 1.27 18.87 ± 1.34 10 558.1 50.86 0.52 10 609.48 8669.0 488.9
DP+GD 0.96 ± 0.10 19.81 ± 1.62 20.77 ± 1.71 9992.87 50.85 7.49 10 051.21 8867.4 488.8
MIP 4.66 ± 0.24 0.05 ± 0.00 4.72 ± 0.24 9887.23 54.24 2.28 9943.75 8791.4 526.4
FF-H 0.00 ± 0.00 0.12 ± 0.01 0.11 ± 0.00 11 129.70 0.60 0.52 11 120.83 9133.1 5.6
MB-H 0.05 ± 0.02 1.92 ± 0.03 1.97 ± 0.03 10 740.08 39.77 0.52 10 780.37 8823.9 366.1
TV
DP 1.10 ± 0.08 23.10 ± 1.00 24.20 ± 1.06 13 032.49 79.02 0.61 13 112.13 10 612.5 670.2
DP+GD 1.17 ± 0.09 24.21 ± 0.67 25.38 ± 0.73 12 864.52 79.02 0.54 12 944.08 10 676.9 670.1
MIP 6.02 ± 0.23 0.08 ± 0.02 6.10 ± 0.23 12 786.33 87.03 8.88 12 882.24 10 606.7 732.5
FF-H 0.00 ± 0.00 0.17 ± 0.01 0.17 ± 0.01 13 892.69 0.46 0.61 13 894.76 11 303.8 3.6
MB-H 0.09 ± 0.02 3.13 ± 0.06 3.22 ± 0.05 13 334.31 68.58 0.61 13 403.79 10 856.6 544.7
VT
DP 0.86 ± 0.06 17.49 ± 0.68 18.35 ± 0.71 10 013.70 29.87 20.15 10 063.71 7398.5 336.1
DP+GD 0.98 ± 0.08 19.65 ± 0.46 20.64 ± 0.53 9795.97 29.86 48.22 9874.05 7550.8 336.1
MIP 2.22 ± 0.37 0.05 ± 0.00 2.26 ± 0.36 9286.90 68.34 16.03 9371.27 7189.0 686.8
FF-H 0.00 ± 0.00 0.11 ± 0.02 0.10 ± 0.02 10 470.68 0.30 15.45 10 486.44 7744.1 2.7
MB-H 0.04 ± 0.02 1.75 ± 0.27 1.79 ± 0.26 10 204.31 23.71 15.45 10 243.48 7532.0 260.7
Figure 3: Semi-log plot of the average total solving time
by DP, DP+GD, and MIP with respect to the number of
terminals in the instances.
6.6 Discussion
Results from Section 6 demonstrate that the MIP ap-
proach always yields better solutions than the DP ap-
proach, but that the latter has a smaller internal solv-
ing time. This is expected, since the MIP is the only
method capable of leveraging the soft schedule. Un-
like other methods, which strictly adhere to the sched-
ule and sometimes result in smaller charging win-
dows, the MIP can choose to arrive earlier at a ter-
minal, thus extending the available charging window.
While this strategy incurs a cost for deviating from
the schedule, it allows for a longer charging duration
(which also incurs an additional cost), ultimately in-
creasing the available electrical energy for the sub-
sequent flight. This increase in electricity reduces
the fuel required for the next flight, thereby lower-
ing fuel costs. The primary advantage of the MIP
lies in its ability to identify scenarios where the re-
duction in fuel costs outweighs the combined costs
associated with deviating from the schedule and in-
creased electricity consumption. On the other hand,
considering the soft schedule and all its different sce-
narios can cause higher solving time, thus explaining
why the MIP has higher solving time than the other
approaches.
Thus, each approach has its benefits and draw-
backs. With an average reduction of 145$ using the
MIP method compared to the DP+GD method, air-
craft operators in a real-life setting should evaluate if
this cost reduction is profitable enough, notably when
taking into account the costs of hosting such an ap-
proach (e.g., solver license costs and infrastructure).
On the other hand, the DP approach has the advantage
of having fewer hardware limitations (e.g., memory
usage). Moreover, the MIP approach does not scale
well on larger instances and could take days to solve,
while DP could take less than 10 minutes.
A Mixed-Integer Programming Approach for an Extended Fixed Route Hybrid Electric Aircraft Charging Problem
29

On realistic instances, the MIP approach finds the
optimal solution in less than 7 seconds, which makes
it an interesting choice for a real-life planning con-
text. In addition, it is easier to improve and maintain,
while it can take into consideration a wider range of
constraints. It is thus easier to build on this approach
to solve variants of the FRHACP and its extension.
The MIP approach is also guaranteed to return an op-
timal solution (given its approximations), while the
DP methods are only heuristics for this problem. We
believe that greater variance in fuel, electricity and
schedule costs could lead to greater cost differences
between the approaches.
7 CONCLUSION
In this paper, we introduced an extended version
of the FRHACP incorporating additional constraints
and soft schedule requirements. To solve both the
FRHACP and its extension, we proposed a MIP ap-
proach. Through a comparative analysis involving a
benchmark of 10 realistic instances, we compared the
MIP approach against an updated DP approach ini-
tially introduced in previous work for the FRHACP.
Our findings consistently demonstrated that the MIP
approach yields superior solutions than DP, both
with and without gradient descent post-treatment,
achieving average cost reductions of 145$ (1.7%) and
377$ (4.3%), respectively. However, we showed that
it also requires a longer solving time compared to
the DP approach. Furthermore, our analysis revealed
that the MIP approach exhibits significantly lower
scalability than its counterpart, thus each method has
its advantages and limitations. Directions for future
work include performing a sensitivity analysis on the
impact of the different parameters, as well as consid-
ering a variable aircraft speed.
ACKNOWLEDGMENTS
This work received financial support from the Con-
sortium for Research and Innovation in Aerospace in
Quebec (CRIAQ) and the Mitacs Accelerate program.
The authors would like to thank the many members of
the Thales project team for their feedback on the prob-
lem definition and for the prototype implementation,
especially Vanessa Simard for her contribution on the
benchmark creation methodology.
REFERENCES
Ansarey, M., Shariat Panahi, M., Ziarati, H., and Mahjoob,
M. (2014). Optimal energy management in a
dual-storage fuel-cell hybrid vehicle using multi-
dimensional dynamic programming. Journal of Power
Sources, 250:359–371.
Ansell, P. J. and Haran, K. S. (2020). Electrified airplanes:
A path to zero-emission air travel. IEEE Electrifica-
tion Magazine, 8(2):18–26.
De Cauwer, C., Verbeke, W., Coosemans, T., Faid, S., and
Van Mierlo, J. (2017). A data-driven method for
energy consumption prediction and energy-efficient
routing of electric vehicles in real-world conditions.
Energies, 10(5):608.
Desch
ˆ
enes, A., Boudreault, R., Simard, V., Gaudreault, J.,
and Quimper, C.-G. (2023). Dynamic programming
for the fixed route hybrid electric aircraft charging
problem. In Wu, W. and Guo, J., editors, Combina-
torial Optimization and Applications, Lecture Notes
in Computer Science, pages 354–365, Cham. Springer
Nature Switzerland.
Desch
ˆ
enes, A., Gaudreault, J., and Quimper, C.-G. (2022).
Predicting real life electric vehicle fast charging ses-
sion duration using neural networks. In 2022 IEEE In-
telligent Vehicles Symposium (IV), pages 1327–1332.
Desch
ˆ
enes, A., Gaudreault, J., Rioux-Paradis, K., and Red-
mont, C. (2020a). Predicting electric vehicle con-
sumption: A hybrid physical-empirical model. World
Electric Vehicle Journal, 11(1):2.
Desch
ˆ
enes, A., Gaudreault, J., Vignault, L.-P., Bernard, F.,
and Quimper, C.-G. (2020b). The fixed route electric
vehicle charging problem with nonlinear energy man-
agement and variable vehicle speed. In 2020 IEEE
International Conference on Systems, Man, and Cy-
bernetics (SMC), pages 1451–1458.
Ehrgott, M. and Tenfelde-Podehl, D. (2003). Computation
of ideal and Nadir values and implications for their use
in MCDM methods. European Journal of Operational
Research, 151(1):119–139.
Lin, J., Zhou, W., and Wolfson, O. (2016). Electric vehicle
routing problem. Transportation Research Procedia,
12:508–521.
Mancini, S. (2017). The hybrid vehicle routing problem.
Transportation Research Part C: Emerging Technolo-
gies, 78:1–12.
Misener, R. and Floudas, C. A. (2010). Piecewise-
linear approximations of multidimensional functions.
Journal of Optimization Theory and Applications,
145(1):120–147.
Montoya, A., Gu
´
eret, C., Mendoza, J. E., and Villegas, J. G.
(2017). The electric vehicle routing problem with
nonlinear charging function. Transportation Research
Part B: Methodological, 103:87–110.
Nethercote, N., Stuckey, P. J., Becket, R., Brand, S., Duck,
G. J., and Tack, G. (2007). MiniZinc: Towards a stan-
dard CP modelling language. In Bessi
`
ere, C., edi-
tor, Principles and Practice of Constraint Program-
ming – CP 2007, Lecture Notes in Computer Science,
ICORES 2025 - 14th International Conference on Operations Research and Enterprise Systems
30

pages 529–543, Berlin, Heidelberg. Springer. Web-
site: https://www.minizinc.org/.
Pinto Leite, J. P. S. and Voskuijl, M. (2020). Optimal energy
management for hybrid-electric aircraft. Aircraft En-
gineering and Aerospace Technology, 92(6):851–861.
Seyfi, M., Alinaghian, M., Ghorbani, E., C¸ atay, B., and Sab-
bagh, M. (2022). Multi-mode hybrid electric vehicle
routing problem. Transportation Research Part E: Lo-
gistics and Transportation Review, 166:102882.
Sun, J., Hoekstra, J. M., and Ellerbroek, J. (2020). Ope-
nAP: An open-source aircraft performance model for
air transportation studies and simulations. Aerospace,
7(8):104.
Yu, V. F., Redi, A. A. N. P., Hidayat, Y. A., and Wibowo,
O. J. (2017). A simulated annealing heuristic for the
hybrid vehicle routing problem. Applied Soft Comput-
ing, 53:119–132.
Zhen, L., Xu, Z., Ma, C., and Xiao, L. (2020). Hy-
brid electric vehicle routing problem with mode selec-
tion. International Journal of Production Research,
58(2):562–576.
A Mixed-Integer Programming Approach for an Extended Fixed Route Hybrid Electric Aircraft Charging Problem
31
