HandMvNet: Real-Time 3D Hand Pose Estimation Using Multi-View
Cross-Attention Fusion
Muhammad Asad Ali
1,2
, Nadia Robertini
1
and Didier Stricker
1,2
1
Augmented Vision Group, German Research Center for Artificial Intelligence (DFKI), Kaiserslautern, Germany
2
Department of Computer Science, University of Kaiserslautern-Landau (RPTU), Kaiserslautern, Germany
{firstname middlename.lastname}@dfki.de
Keywords:
Hand Reconstruction, Hand Pose Estimation, Multi-View Reconstruction.
Abstract:
In this work, we present HandMvNet, one of the first real-time method designed to estimate 3D hand mo-
tion and shape from multi-view camera images. Unlike previous monocular approaches, which suffer from
scale-depth ambiguities, our method ensures consistent and accurate absolute hand poses and shapes. This is
achieved through a multi-view attention-fusion mechanism that effectively integrates features from multiple
viewpoints. In contrast to previous multi-view methods, our approach eliminates the need for camera param-
eters as input to learn 3D geometry. HandMvNet also achieves a substantial reduction in inference time while
delivering competitive results compared to the state-of-the-art methods, making it suitable for real-time ap-
plications. Evaluated on publicly available datasets, HandMvNet qualitatively and quantitatively outperforms
previous methods under identical settings. Code is available at github.com/pyxploiter/handmvnet.
1 INTRODUCTION
3D hand pose estimation has emerged as a impor-
tant research area in computer vision with applica-
tions across fields like augmented reality (AR), virtual
reality (VR), and robotics. The ability to accurately
capture and reconstruct hand movements holds im-
mense potential in enhancing human-computer inter-
action, enabling more natural, intuitive gesture-based
controls. In AR and VR, realistic and responsive hand
pose estimation enriches immersive experiences, al-
lowing users to interact seamlessly with virtual envi-
ronments. Similarly, in robotics, precise hand pose
estimation is important for tasks such as robotic hand
retargeting, where robotic hands mimic human move-
ments to perform intricate tasks.
Traditional approaches in 3D hand pose estima-
tion have primarily relied on single-view images
(Boukhayma et al., 2019; Chen et al., 2021a,b; Ge
et al., 2019; Moon and Lee, 2020; Park et al., 2022).
However, 3D hand pose estimation from monocular
views presents several challenges. Depth and scale
ambiguity, where the exact distance and size of the
hand from the camera are difficult to determine, sig-
nificantly complicates the estimation process. Conse-
quently, many approaches only estimate root-relative
hand vertices (Moon and Lee, 2020; Ge et al., 2019;
Zhou et al., 2020). Occlusions, caused by the overlap-
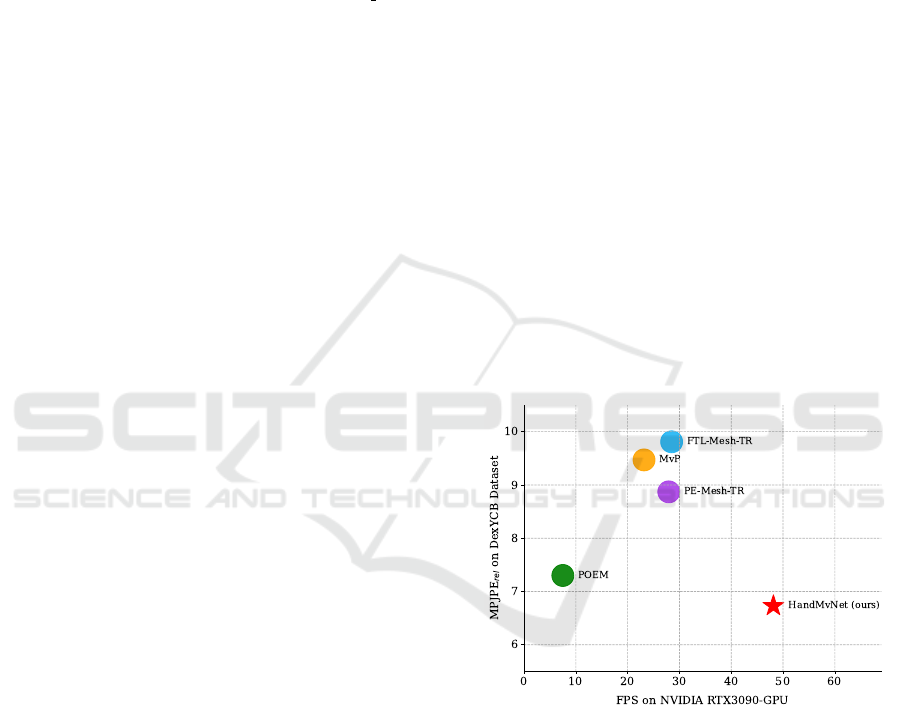
Figure 1: Comparison of error vs. inference speed across
different methods. Our approach outperforms other meth-
ods in both inference speed and accuracy.
ping of fingers or the hand being partially obscured by
other objects, further add to the complexity of accu-
rately estimating hand poses (Park et al., 2022). Ad-
ditionally, varying perspectives and unknown camera
viewpoints introduce uncertainties that make the task
more challenging.
To address the limitations associated with monoc-
ular views, multi-view setups have been proposed as
a solution (Yu et al., 2021; Chao et al., 2021; Yang
et al., 2022; Hampali et al., 2020). A multi-view
setup, consisting of multiple cameras positioned at
Ali, M. A., Robertini, N. and Stricker, D.
HandMvNet: Real-Time 3D Hand Pose Estimation Using Multi-View Cross-Attention Fusion.
DOI: 10.5220/0013107300003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 2: VISAPP, pages
555-562
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
555

different angles around the hand, can significantly
reduce the impact of occlusions and depth ambigui-
ties, enabling more accurate and robust estimation of
hand poses and shapes at absolute 3D locations. Most
multi-view approaches (Guan et al., 2006; Yang et al.,
2023; Zheng et al., 2023) are computationally expen-
sive, primarily due to the increased input space and
architectural design choices that prioritize qualitative
results over computational efficiency.
In this work, we propose HandMvNet, a novel
neural network architecture for efficient and accurate
3D hand pose estimation from multi-view inputs. The
key contributions of this work are as follows:
• We present a framework that leverages multi-view
data for accurate 3D hand pose estimation.
• Our method achieves real-time performance,
making it suitable for time-critical applications.
• We show that our approach performs effectively
with or without camera calibration.
We conduct extensive experiments on public
multi-view datasets for hand pose and shape recon-
struction in challenging scenarios, including strong
occlusions from object interactions. Our findings
demonstrate that HandMvNet effectively and accu-
rately estimates hand poses and shapes, outperform-
ing existing state-of-the-art methods both qualita-
tively and computationally.
2 RELATED WORK
Most approaches have focused on estimating hand
pose from monocular input (Ge et al., 2019;
Boukhayma et al., 2019; Zhou et al., 2020; Chen
et al., 2021a,b; Park et al., 2022; Moon and Lee,
2020). While various hand representations have been
proposed (Chen et al., 2021a; Malik et al., 2020,
2021), the deformable hand mesh model MANO
(Romero et al., 2022), which includes dense 3D hand
surface representation, remains the most widely used
(Chen et al., 2021a; Park et al., 2022; Zhou et al.,
2020; Boukhayma et al., 2019). Similarly to (Ge
et al., 2019), we uniquely estimate the hand mesh di-
rectly, bypassing the need for the MANO model pa-
rameters, thus offering a flexible, model-free solution.
With the rise of transformer architectures (Vaswani
et al., 2017), such frameworks have also been adopted
for 3D pose estimation, showcasing their effective-
ness (Park et al., 2022; Zhao et al., 2022; Lin et al.,
2021). Despite recent advances, most methods fo-
cus on estimating root-relative hand poses due to lim-
ited input information and scale-depth ambiguity. In
this work, we integrate contributions from multiple
views using cross-attention, enabling the estimation
of contextualized 3D absolute hand poses. Com-
pared to other multi-view approaches (Ge et al., 2016;
He et al., 2020; Han et al., 2022; Remelli et al.,
2020; Iskakov et al., 2019), our method avoids con-
ventional volumetric or other intermediate represen-
tations that negatively affect the inference speed. Al-
though most approaches require multi-view camera
calibration, mainly for algebraic triangulation and ge-
ometric priors to estimate 3D hand pose (Remelli
et al., 2020; Bartol et al., 2022; Chen et al., 2022;
Iskakov et al., 2019; Tu et al., 2020; He et al., 2020;
Zhang et al., 2021b), we instead propose a more flex-
ible, calibration-free solution that can optionally in-
corporate camera parameters. Recent advancements
(Yang et al., 2023; Shuai et al., 2022; Ma et al.,
2022) in transformer-based implicit cross-view fusion
inspire our proposed method for multi-view cross-
attention fusion.
3 METHOD
The aim of our HandMvNet approach is to estimate
3D hand joints and vertices from multi-view RGB im-
ages. In this section, we provide a comprehensive de-
scription of our proposed model architecture.
3.1 Architecture
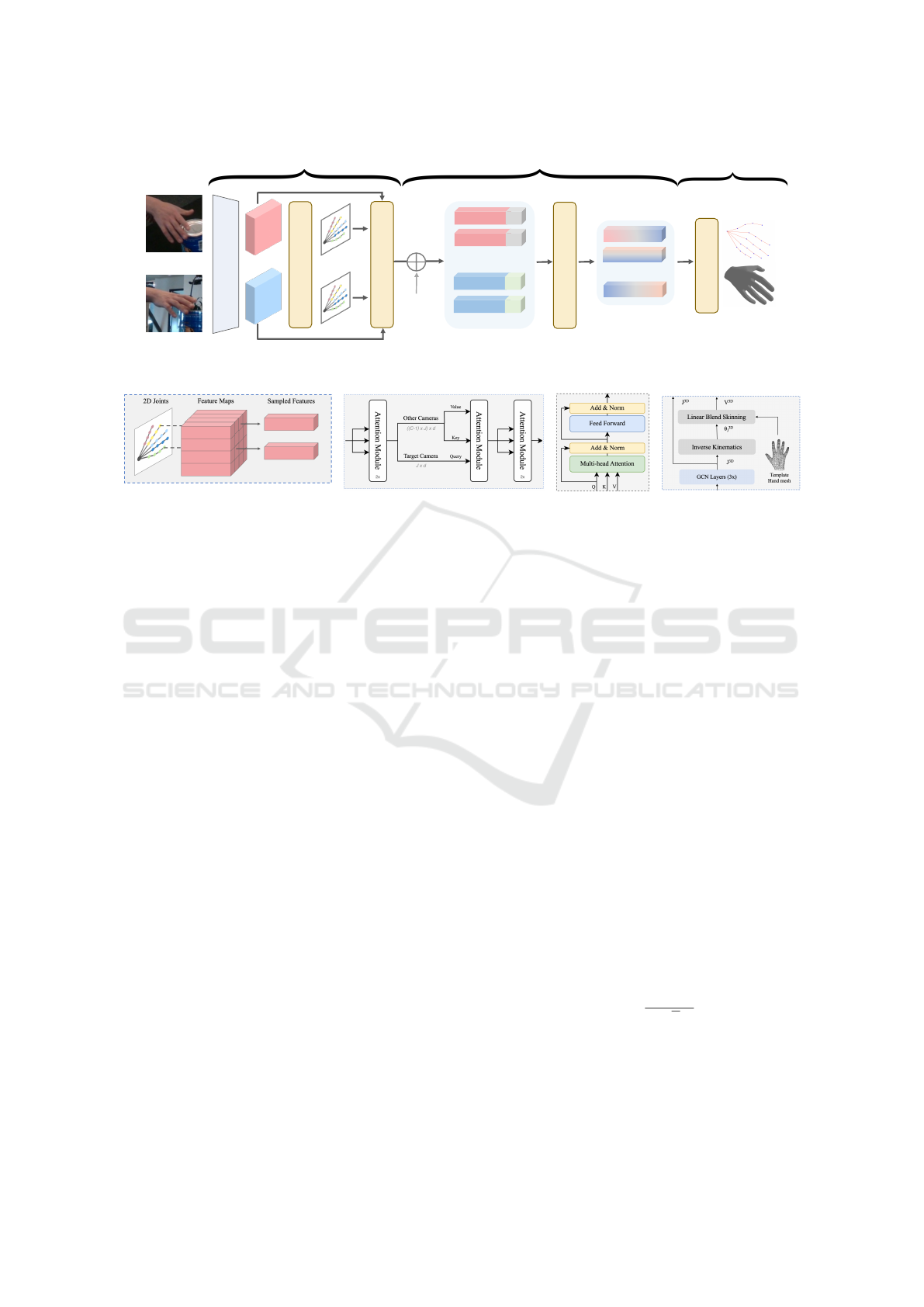
The overall pipeline of HandMvNet is illustrated in
Figure 2. The network processes a set of multi-view
RGB images, I = {I
i
}
C
i=1
, captured from C camera
views and estimates the 3D hand joints J
3D
∈ R
J ×3
and vertices V
3D
∈ R
V ×3
, where J = 21 & V = 778.
The architecture consists of three key stages:
(1) Pre-Fusion: Each input image is independently
processed to extract view-specific features and esti-
mate 2D joint locations, with shared network weights
across all views. (2) Fusion: The extracted features
are then fused to aggregate multi-view information
for enhanced 3D understanding (see Figure 3b). (3)
Post-Fusion: Finally, the fused features are refined
to regress the 3D hand joints and vertices, producing
the complete 3D hand reconstruction. Each stage is
described in detail in the sections below.
3.1.1 Pre-Fusion
Backbone. The first stage of our pipelines uses
ResNet50 (He et al., 2016) as a backbone to extract
the view-specific image features from input images.
The backbone is pre-trained on the ImageNet dataset
(Deng et al., 2009), and its weights are shared across
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
556
Backbone
2D Joint Estimator
I
1
I
n
Point Feature Sampler
Multi-view Feature Fusion
Joint & Mesh Decoder
...
feature
pos.
...
...
Positional
Encoding
CJ x d
J x d
Pre-Fusion
Fusion
Post-Fusion
Figure 2: HandMvNet’ architecture consists of three stages: (a) Sampling joint-aligned features using predicted 2D joints
from each image (b) Fusing multi-view sampled features, (c) Regressing 3D hand joints and vertices.
(a) .
(b) .
(c) .
(d) .
Figure 3: Modules of HandMvNet’s architecture: (a) Point Feature Sampler. (b) Multi-view Feature Fusion. (c) Attention
Module. (d) Joint & Mesh Decoder.
each camera view. For each camera view i, the back-
bone processes the image I
i
and outputs a correspond-
ing view-specific feature map Z
i
∈ R
1024×32×32
.
2D Joint Estimator. At this stage, two convolu-
tional layers refine the features Z
i
to produce joint-
specific heatmaps H
i
. To extract the 2D joint loca-
tions from the heatmaps, we apply a differentiable
soft-argmax function (Sun et al., 2018), which trans-
forms the heatmaps into directly usable joint coordi-
nates J
2D
i
= soft-argmax( f
CNN
(Z
i
)) ∈ R
J ×2
.
Point Feature Sampler. In the final pre-fusion stage,
we extract view-specific features from Z
i
(see Fig-
ure 3a), reduced to a dimensionality of R
512×32×32
using a convolutional layer, corresponding to 2D
joint locations J
2D
i
, S
i
= sampler(Z
i
,J
2D
i
), S
i
∈
R
J ×512
. The sampled joint-aligned features from
all camera views are concatenated, forming the
aggregated multi-view feature representation S =
concat(S
1
,S
2
,...,S
C
), where S ∈ R
C J ×512
.
3.1.2 Fusion
Positional Encoding. To preserve critical spatial and
geometric information in cropped hand images, we
introduce three types of positional encodings:
1) PE
joint
∈R
C J ×2
embeds 2D joint positions into the
feature vector to capture the hand’s skeletal structure
and the relative joint positions in each view.
2) PE
crop
∈ R
C ×10
encodes the location of the hand
crop relative to the camera (Prakash et al., 2023), with
each corner and one center point (x,y) calculated as
θ
x
= tan
−1
((x −p
x
)/ f
x
) and θ
y
= tan
−1
((y −p
y
)/ f
y
),
where p
x
, p
y
are the principal point coordinates, and
f
x
, f
y
are focal lengths. PE
crop
is repeated J times for
each joint in the view. This encoding is only applied
if camera intrinsics are available.
3) Sinusoidal encoding PE
sin
∈R
C J ×d
(Vaswani et al.,
2017) captures inter-view and inter-joint relations for
attention-based fusion.
The final feature vector is:
F = concat(S,PE
joint
,PE
crop
) + PE
sin
. (1)
where F ∈R
C J ×d
and d = 512 + 2 + 10 = 524.
Multi-View Feature Fusion. To capture the de-
pendencies between non-local joints across C cam-
era views, we pass the independently sampled fea-
tures F through attention module (Figure 3c) and then,
to fuse multi-view features, we employ multi-head
cross-attention between the first camera view features
F
1
∈ R
J ×d
acting as the query and the features from
the remaining camera views F
C −1
∈ R
((C −1)×J )×d
acting as the key and value (source). The cross-
attention is formulated as:
F
∗
= softmax
F
1
F
T
C −1
√
d
!
F
C −1
(2)
The cross-attention layer outputs F
∗
∈ R
J ×d
where
J = 21 and d = 524, which aggregates the features
across the camera views into the target camera feature
space. Finally, self-attention is applied again to F
∗
to
further refine the intra-joint relationships.
HandMvNet: Real-Time 3D Hand Pose Estimation Using Multi-View Cross-Attention Fusion
557
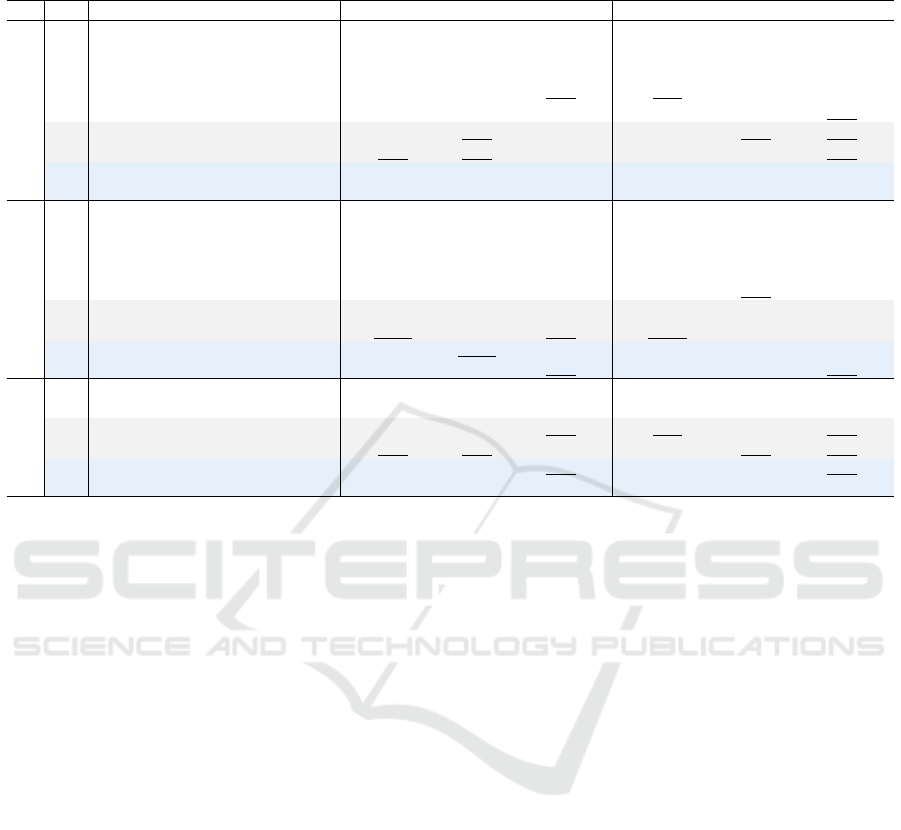
Table 1: Quantitative results (mm) on the test sets of DexYCB-MV, HO3D-MV, and MVHand. denotes the methods that
require camera parameters. The best and second-best results are highlighted in bold and underlined respectively.
# Methods MPJPE
rel
↓ PA
J
↓ AUC
J@20
↑ MPVPE
rel
↓ PA
V
↓ AUC
V @20
↑
DexYCB-MV
1 MvP 9.47 4.26 0.69 12.18 8.14 0.53
2 PE-Mesh-TR 8.87 4.76 0.64 8.67 4.70 0.64
3 FTL-Mesh-TR 9.81 5.51 0.59 9.80 5.75 0.59
4 POEM 7.30 3.93 0.68 7.21 4.00 0.70
5 Multi-view Fit. 8.77 5.19 0.65 8.71 5.29 0.65
6 HandMvNet (ours) 6.73 4.08 0.67 7.19 4.52 0.65
7 HandMvNet-HR (ours) 6.89 4.08 0.67 7.30 4.53 0.65
8 HandMvNet w/o cam. (ours) 7.03 4.13 0.66 7.38 4.56 0.64
9 HandMvNet-HR w/o cam. (ours) 7.28 4.20 0.65 7.62 4.69 0.63
HO3D-MV
AUC
J@50
↑ AUC
V @50
↑
10 MvP 24.90 10.44 0.60 27.08 10.04 0.59
11 PE-Mesh-TR 30.23 11.67 0.54 29.19 11.31 0.55
12 FTL-Mesh-TR 34.74 10.72 0.52 33.53 10.56 0.53
13 POEM 21.94 9.60 0.63 21.45 9.97 0.66
14 HandMvNet (ours) 21.43 10.89 0.59 20.17 10.16 0.61
15 HandMvNet-HR (ours) 20.73 11.01 0.61 19.82 10.73 0.62
16 HandMvNet w/o cam. (ours) 21.55 10.15 0.58 20.10 9.39 0.61
17 HandMvNet-HR w/o cam. (ours) 20.40 11.98 0.61 19.33 11.24 0.63
MVHand
AUC
J@20
↑ AUC
V @20
↑
18 MediaPipe-DLT 17.24 9.97 0.28 18.42 7.74 0.21
19 HandMvNet (ours) 2.07 1.30 0.90 7.57 4.14 0.62
20 HandMvNet-HR (ours) 1.86 1.21 0.91 7.59 4.12 0.62
21 HandMvNet w/o cam. (ours) 2.05 1.28 0.90 7.62 4.11 0.62
22 HandMvNet-HR w/o cam. (ours) 1.77 1.14 0.91 7.46 4.15 0.63
3.1.3 Post-Fusion
Joint & Mesh Decoder. We use a three-layer graph
convolutional network (GCN) to decode 3D joints
from the fused feature F
∗
∈ R
J ×d
, treating J joints
as graph nodes with d-dimensional features, estimat-
ing the final J
3D
∈ R
J ×3
. Inverse Kinematics (IK) is
then applied to compute joint rotation angles θ
J
3D
∈
R
(J −5)×3
, which form a hand skeleton. This skele-
ton deforms a hand template mesh via linear blend
skinning to yield the final 3D vertices V
3D
∈R
V ×3
as
shown in Figure 3d.
3.2 Training
We apply mean squared error loss for the predicted
2D heatmaps (L
H
) and L1 loss for both 2D and 3D
joints (L
2D
, L
3D
). Additionally, if camera parameters
are available, we project predicted 3D joints onto 2D
camera views using the perspective function Π
c
(·) :
R
3
→ R
2
, and minimize the L1 loss between these
projections and the ground-truth 2D joints (L
G2D
), as
well as the predicted 2D joints (L
P2D
). The total loss
is defined as:
L = λ
H
L
H
+ λ
2D
L
2D
+ λ
3D
L
3D
+λ
G2D
L
G2D
+λ
P2D
L
P2D
(3)
where λ values are set as 10, 1, 1, 1, and 0.5 to balance
the loss scale, respectively.
4 EXPERIMENTS AND RESULTS
In this section, we conduct experiments to validate
and assess the effectiveness of our proposed archi-
tecture, along with providing implementation details.
We use Pytorch (Paszke et al., 2019) to implement all
our networks. The AdamW (Loshchilov, 2017) opti-
mizer is used with a weight decay of 0.05 and an ini-
tial learning rate set to 0.0001. The model is trained
on two RTXA6000 GPUs with a batch size of 32.
Cropped hand images resized to 256×256, serve as
input data. We also evaluate a variation of our model,
denoted as HandMvNet-HR, which uses HRNet-w40
as backbone (Sun et al., 2019).
4.1 Datasets
DexYCB (Chao et al., 2021): is a multi-view RGB-D
dataset capturing hand-object interactions, featuring
10 subjects and 8 camera views per subject. We fol-
low the official “S0” split, excluding left-hand sam-
ples, resulting in 25,387 training, 1,412 validation,
and 4,951 test multi-view samples, same as (Yang
et al., 2023). We refer to this split as DexYCB-MV.
HO3D (v3) (Hampali et al., 2020): includes images
of hand-object interaction from up to 5 cameras. We
construct HO3D-MV by selecting 7 sequences with
complete multi-view observations from all 5 cam-
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
558

Table 2: Ablation Studies.
(a) Different positional encodings.
Pos. Encoding MPJPE
rel
↓ PA
J
↓ AUC
J
↓
sin 7.69 4.40 0.63
sin + joint 6.96 4.14 0.66
sin + joint + crop 6.73 4.08 0.67
(b) Effect of fusion layers.
Fusion Layers MPJPE
rel
↓ PA
J
↓ AUC
J
↑
3 6.90 4.16 0.66
5 6.73 4.08 0.67
7 6.88 4.14 0.67
(c) Different number of camera views.
Camera views MPJPE
rel
↓ PA
J
↓ AUC
J
↑
8 6.73 4.08 0.67
4 7.47 4.38 0.64
2 8.33 4.83 0.60
Figure 4: Qualitative results on the test set of DexYCB-MV dataset.
eras. For the training set, we use the sequences
‘ABF1’,‘BB1’, ‘GSF1’, ‘MDF1’, and ‘SiBF1’, while
the sequences ‘GPMF1’ and ‘SB1’ are reserved for
testing. This results in 9,087 training and 2,706 test
multi-view samples.
MVHand (Yu et al., 2021): is a multi-view RGB-
D hand pose dataset featuring 4 subjects and 4 cam-
era views per subject. We split the 21,200 multi-
view frames into 15,417 training, 1,927 validation,
and 3,856 test multi-view samples.
4.2 Evaluation Metrics
We evaluate the performance of our method using
the following standard hand pose estimation metrics.
1) MPJPE
rel
/MPVPE
rel
(Mean Per Joint/Vertex Po-
sition Error) calculates the average Euclidean dis-
tance (in mm) between predicted and ground-truth
joints/vertices, after aligning the root(-wrist) joint.
2) PA-MPJPE/PA-MPVPE (Procrustes Aligned
Joint/Vertex Error) measures MPJPE/MPVPE after
applying procrustes analysis for scale, center and ro-
tation alignment. We refer to these metrics as PA
J
and PA
V
in our experiments. 3) AUC
J
/AUC
V
(Area
Under Curve for Joint/Vertex Error) computes the
area under the percentage of correct keypoints (PCK)
curve over a range of thresholds.
4.3 Comparison with Previous Methods
We benchmark our 3D hand reconstruction approach
against state-of-the-art (SOTA) multi-view methods,
including POEM (Yang et al., 2023) and MvP
(Zhang et al., 2021a). Although MvP is primarily
designed for multi-person pose estimation, we fo-
cus on its performance in single-hand reconstruction.
Given the limited availability of multi-view hand pose
methods, we further evaluate simulated approaches
that combine single-view hand reconstruction with
advanced multi-view fusion techniques. Detailed de-
scriptions of these simulated methods, such as PE-
Mesh-TR (Liu et al., 2022; Lin et al., 2021), FTL-
Mesh-TR (Remelli et al., 2020), and Multi-view Fit-
ting (Hampali et al., 2020), are provided in Section
4.2 of (Yang et al., 2023). For the MVHand dataset,
which lacks established multi-view benchmarks, we
introduce a baseline ”Mediapipe-DLT” that estimates
2D joints using Mediapipe (Zhang et al., 2020), tri-
angulates them via Direct Linear Transform (DLT)
(Hartley and Zisserman, 2003), and obtains 3D ver-
tices through linear blend skinning.
Table 1 shows that our method consistently out-
performs SOTA approaches in terms of MPJPE
rel
and
MPVPE
rel
across all datasets, while achieving com-
petitive performance in other metrics. In particular,
our camera-independent variants, “HandMvNet w/o
cam.” and “HandMvNet-HR w/o cam.”, also show
superior performance in most cases. Our method’s
capacity to implicitly learn 3D geometry demands
substantial data, leading to a performance decline on
smaller datasets like HO3D-MV as shown in Table
1. Figure 1 shows that HandMvNet surpasses other
methods in both accuracy (lower MPJPE
rel
) and infer-
ence speed (higher FPS). We visualize qualitative re-
sults on the DexYCB-MV, HO3D-MV, and MVHand
test sets in Figures 4, 5, and 6, respectively.
HandMvNet: Real-Time 3D Hand Pose Estimation Using Multi-View Cross-Attention Fusion
559
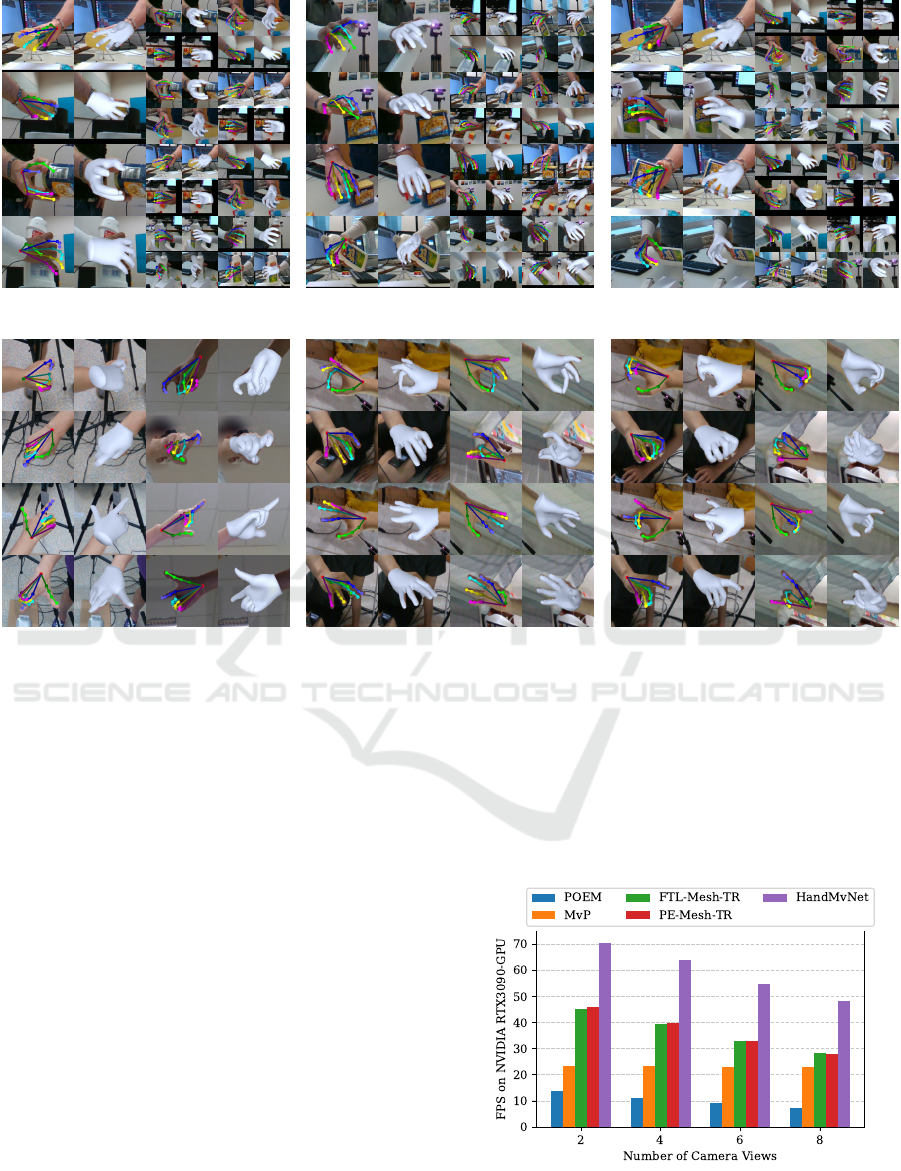
Figure 5: Qualitative results on the test set of HO3D-MV dataset.
Figure 6: Qualitative results on the test set of MVHand dataset.
4.4 Ablation Study
Different Backbones. We compare the results
of HandMvNet using ResNet50 as backbone and
HandMvNet-HR using HRNet-w40 as backbone in
the rows 6-7, 14-15, 19-20 of Table 1.
Use of Camera Parameters. In our method, cam-
era parameters are used to add the PE
crop
positional
encoding and loss terms L
G2D
and L
P2D
. To evaluate
the effect of removing camera dependency, we create
variants “HandMvNet w/o cam.” and “HandMvNet-
HR w/o cam.” by excluding these components. The
performance of both versions, with and without cam-
era parameters, are compared in rows 6-9, 14-17,
19-22 of Table 1.
Impact of Positional Encoding. In Table 2a, we
examine the effect of different positional encodings
on performance. Using the combination of sinu-
soidal positional encoding (PE
sin
), joint-wise encod-
ing (PE
joint
) and crop encoding (PE
crop
) results in the
best performance.
Number of Fusion Layers. The impact of varying
the number of fusion layers is presented in Table 2b.
We observe that increasing from 3 to 5 layers im-
proves performance, but adding more layers does not
further enhance performance, suggesting that 5 layers
are optimal.
Different Number of Camera Views. Table 2c
shows that model performance improves gradually
with increasing the number of camera views. We
also compare FPS across different camera views with
other approaches in Figure 7.
Figure 7: Inference Speed (FPS) comparison across meth-
ods with different camera views. HandMvNet achieves the
highest FPS across all configurations.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
560

5 CONCLUSION
We introduced HandMvNet, one of the first real-time
methods for estimating 3D hand motion and shape
from multi-view camera images. Our approach em-
ploys a multi-view attention-fusion mechanism that
effectively integrates features from multiple view-
points, delivering consistent and accurate absolute
hand poses and shapes, free from the scale-depth
ambiguities typically seen in monocular methods.
Unlike previous multi-view approaches, HandMvNet
eliminates the need for camera parameters to learn
3D geometry. We validated the architecture through
extensive ablation studies and compared its perfor-
mance with state-of-the-art methods. Experiments on
public datasets demonstrate the effectiveness of our
approach, delivering superior accuracy and inference
speed compared to existing methods.
ACKNOWLEDGMENT
This research has been partially funded by the
EU projects FLUENTLY (GA Nr 101058680) and
Sharespace (GA Nr 10192889).
REFERENCES
Bartol, K., Bojani
´
c, D., Petkovi
´
c, T., and Pribani
´
c, T.
(2022). Generalizable human pose triangulation. In
Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition, pages 11028–
11037.
Boukhayma, A., Bem, R. d., and Torr, P. H. (2019). 3d hand
shape and pose from images in the wild. In Proceed-
ings of the IEEE/CVF Conference on Computer Vision
and Pattern Recognition, pages 10843–10852.
Chao, Y.-W., Yang, W., Xiang, Y., Molchanov, P., Handa,
A., Tremblay, J., Narang, Y. S., Van Wyk, K., Iqbal,
U., Birchfield, S., et al. (2021). Dexycb: A benchmark
for capturing hand grasping of objects. In Proceedings
of the IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 9044–9053.
Chen, P., Chen, Y., Yang, D., Wu, F., Li, Q., Xia, Q., and
Tan, Y. (2021a). I2uv-handnet: Image-to-uv predic-
tion network for accurate and high-fidelity 3d hand
mesh modeling. In Proceedings of the IEEE/CVF
International Conference on Computer Vision, pages
12929–12938.
Chen, X., Liu, Y., Ma, C., Chang, J., Wang, H., Chen, T.,
Guo, X., Wan, P., and Zheng, W. (2021b). Camera-
space hand mesh recovery via semantic aggregation
and adaptive 2d-1d registration. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 13274–13283.
Chen, Z., Zhao, X., and Wan, X. (2022). Structural tri-
angulation: A closed-form solution to constrained 3d
human pose estimation. In European Conference on
Computer Vision, pages 695–711. Springer.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). ImageNet: A Large-Scale Hierarchical
Image Database. In CVPR09.
Ge, L., Liang, H., Yuan, J., and Thalmann, D. (2016). Ro-
bust 3d hand pose estimation in single depth images:
from single-view cnn to multi-view cnns. In Proceed-
ings of the IEEE conference on computer vision and
pattern recognition, pages 3593–3601.
Ge, L., Ren, Z., Li, Y., Xue, Z., Wang, Y., Cai, J., and Yuan,
J. (2019). 3d hand shape and pose estimation from
a single rgb image. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion, pages 10833–10842.
Guan, H., Chang, J. S., Chen, L., Feris, R. S., and Turk,
M. A. (2006). Multi-view appearance-based 3d hand
pose estimation. 2006 Conference on Computer Vi-
sion and Pattern Recognition Workshop (CVPRW’06),
pages 154–154.
Hampali, S., Rad, M., Oberweger, M., and Lepetit, V.
(2020). Honnotate: A method for 3d annotation of
hand and object poses. In CVPR.
Han, S., Wu, P.-c., Zhang, Y., Liu, B., Zhang, L., Wang,
Z., Si, W., Zhang, P., Cai, Y., Hodan, T., et al. (2022).
Umetrack: Unified multi-view end-to-end hand track-
ing for vr. In SIGGRAPH Asia 2022 Conference Pa-
pers, pages 1–9.
Hartley, R. and Zisserman, A. (2003). Multiple view geom-
etry in computer vision. Cambridge university press.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
He, Y., Yan, R., Fragkiadaki, K., and Yu, S.-I. (2020).
Epipolar transformers. In Proceedings of the ieee/cvf
conference on computer vision and pattern recogni-
tion, pages 7779–7788.
Iskakov, K., Burkov, E., Lempitsky, V., and Malkov, Y.
(2019). Learnable triangulation of human pose. In
Proceedings of the IEEE/CVF international confer-
ence on computer vision, pages 7718–7727.
Lin, K., Wang, L., and Liu, Z. (2021). End-to-end hu-
man pose and mesh reconstruction with transform-
ers. In Proceedings of the IEEE/CVF conference on
computer vision and pattern recognition, pages 1954–
1963.
Liu, Y., Wang, T., Zhang, X., and Sun, J. (2022). Petr: Posi-
tion embedding transformation for multi-view 3d ob-
ject detection. In European Conference on Computer
Vision, pages 531–548. Springer.
Loshchilov, I. (2017). Decoupled weight decay regulariza-
tion. arXiv preprint arXiv:1711.05101.
Ma, H., Wang, Z., Chen, Y., Kong, D., Chen, L., Liu, X.,
Yan, X., Tang, H., and Xie, X. (2022). Ppt: token-
pruned pose transformer for monocular and multi-
view human pose estimation. In European Conference
on Computer Vision, pages 424–442. Springer.
HandMvNet: Real-Time 3D Hand Pose Estimation Using Multi-View Cross-Attention Fusion
561

Malik, J., Abdelaziz, I., Elhayek, A., Shimada, S., Ali,
S. A., Golyanik, V., Theobalt, C., and Stricker, D.
(2020). Handvoxnet: Deep voxel-based network for
3d hand shape and pose estimation from a single depth
map. In Proceedings of the IEEE/CVF conference on
computer vision and pattern recognition, pages 7113–
7122.
Malik, J., Shimada, S., Elhayek, A., Ali, S. A., Theobalt, C.,
Golyanik, V., and Stricker, D. (2021). Handvoxnet++:
3d hand shape and pose estimation using voxel-based
neural networks. IEEE Transactions on Pattern Anal-
ysis and Machine Intelligence, 44(12):8962–8974.
Moon, G. and Lee, K. M. (2020). I2l-meshnet: Image-to-
lixel prediction network for accurate 3d human pose
and mesh estimation from a single rgb image. In
Computer Vision–ECCV 2020: 16th European Con-
ference, Glasgow, UK, August 23–28, 2020, Proceed-
ings, Part VII 16, pages 752–768. Springer.
Park, J., Oh, Y., Moon, G., Choi, H., and Lee, K. M. (2022).
Handoccnet: Occlusion-robust 3d hand mesh estima-
tion network. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition,
pages 1496–1505.
Paszke, A., Gross, S., Massa, F., Lerer, A., Bradbury, J.,
Chanan, G., Killeen, T., Lin, Z., Gimelshein, N.,
Antiga, L., et al. (2019). Pytorch: An imperative style,
high-performance deep learning library. Advances in
neural information processing systems, 32.
Prakash, A., Gupta, A., and Gupta, S. (2023). Mitigating
perspective distortion-induced shape ambiguity in im-
age crops. arXiv preprint arXiv:2312.06594.
Remelli, E., Han, S., Honari, S., Fua, P., and Wang, R.
(2020). Lightweight multi-view 3d pose estimation
through camera-disentangled representation. In Pro-
ceedings of the IEEE/CVF conference on computer vi-
sion and pattern recognition, pages 6040–6049.
Romero, J., Tzionas, D., and Black, M. J. (2022). Embod-
ied hands: Modeling and capturing hands and bodies
together. arXiv preprint arXiv:2201.02610.
Shuai, H., Wu, L., and Liu, Q. (2022). Adaptive multi-
view and temporal fusing transformer for 3d human
pose estimation. IEEE Transactions on Pattern Anal-
ysis and Machine Intelligence, 45(4):4122–4135.
Sun, K., Xiao, B., Liu, D., and Wang, J. (2019). Deep high-
resolution representation learning for human pose es-
timation. In CVPR.
Sun, X., Xiao, B., Wei, F., Liang, S., and Wei, Y. (2018).
Integral human pose regression. In Proceedings of
the European conference on computer vision (ECCV),
pages 529–545.
Tu, H., Wang, C., and Zeng, W. (2020). Voxelpose:
Towards multi-camera 3d human pose estimation in
wild environment. In Computer Vision–ECCV 2020:
16th European Conference, Glasgow, UK, August 23–
28, 2020, Proceedings, Part I 16, pages 197–212.
Springer.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, Ł., and Polosukhin, I.
(2017). Attention is all you need. Advances in neural
information processing systems, 30.
Yang, L., Li, K., Zhan, X., Wu, F., Xu, A., Liu, L., and Lu,
C. (2022). Oakink: A large-scale knowledge repos-
itory for understanding hand-object interaction. In
Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition, pages 20953–
20962.
Yang, L., Xu, J., Zhong, L., Zhan, X., Wang, Z., Wu, K.,
and Lu, C. (2023). Poem: Reconstructing hand in a
point embedded multi-view stereo. In Proceedings of
the IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 21108–21117.
Yu, Z., Yang, L., Chen, S., and Yao, A. (2021). Local and
global point cloud reconstruction for 3d hand pose es-
timation. arXiv preprint arXiv:2112.06389.
Zhang, F., Bazarevsky, V., Vakunov, A., Tkachenka, A.,
Sung, G., Chang, C.-L., and Grundmann, M. (2020).
Mediapipe hands: On-device real-time hand tracking.
arXiv preprint arXiv:2006.10214.
Zhang, J., Cai, Y., Yan, S., Feng, J., et al. (2021a). Di-
rect multi-view multi-person 3d pose estimation. Ad-
vances in Neural Information Processing Systems,
34:13153–13164.
Zhang, Z., Wang, C., Qiu, W., Qin, W., and Zeng, W.
(2021b). Adafuse: Adaptive multiview fusion for ac-
curate human pose estimation in the wild. Interna-
tional Journal of Computer Vision, 129:703–718.
Zhao, W., Wang, W., and Tian, Y. (2022). Graformer:
Graph-oriented transformer for 3d pose estimation. In
Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition, pages 20438–
20447.
Zheng, X., Wen, C., Xue, Z., Ren, P., and Wang, J. (2023).
Hamuco: Hand pose estimation via multiview collab-
orative self-supervised learning. In Proceedings of the
IEEE/CVF International Conference on Computer Vi-
sion, pages 20763–20773.
Zhou, Y., Habermann, M., Xu, W., Habibie, I., Theobalt, C.,
and Xu, F. (2020). Monocular real-time hand shape
and motion capture using multi-modal data. In Pro-
ceedings of the IEEE/CVF Conference on Computer
Vision and Pattern Recognition, pages 5346–5355.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
562
