
Targeted Test Time Adaptation of Memory Networks for Video Object
Segmentation
Isidore Dubuisson
1
, Damien Muselet
1
, Christophe Ducottet
1
and Jochen Lang
2
1
Universit
´
e Jean Monnet Saint-Etienne, CNRS, Institut d Optique Graduate School, Laboratoire Hubert Curien UMR 5516,
F-42023, Saint-Etienne, France
2
School of Electrical Engineering and Computer Science, University of Ottawa, Ottawa, Canada
Keywords:
Video Segmentation, Test-Time Adaptation, Feature Matching Based, Localized Finetuning.
Abstract:
Semi Automatic Video Object Segmentation (SVOS) aims to segment few objects in a video based on the
annotation of these particular objects in the first frame only. State-of-the-art methods rely on offline training
on a large dataset that may lack specific samples and details directly applicable to the current test video.
Common solutions are to use test-time adaptation to finetune the offline model with the single annotated
frame or by relying on complex semi-supervised strategies. In this paper, we introduce targeted test-time
adaptation of memory-based SVOS providing the benefits of finetuning with much smaller learning effort.
Our method targets specific parts of the model to ensure improved results while maintaining robustness of the
offline training. We find that targeting the bottleneck features and the masks that are saved in memory provide
substantial benefits. The evaluation of our method shows a significant improvement for video segmentation
on DAVIS16 and DAVIS17 datasets.
1 INTRODUCTION
Semi Automatic Video Object Segmentation (SVOS),
also referred to as One Shot Video Object Segmenta-
tion, is the task of segmenting an object, or a set of
objects, in a video that are indicated by first frame
annotations (mask, bounding boxes, scribbles). This
task can be interpreted as propagating the annotation
throughout the following frames of the video. There
exist multiple approaches to address the SVOS task
but we focus on state-of-the-art memory-based meth-
ods.
Starting with the first frame and its groundtruth
annotation, memory-based methods periodically en-
code the features of previous frames along with in-
formation about their label (object vs. background)
into the so-called memory. The segmentation of the
current frame is then performed by first enriching fea-
tures with label information extracted from the mem-
ory by a cross-attention mechanism. The enriched
features are then passed through the decoder to pre-
dict the segmentation mask.
Memory-based models are pretrained on large
scale datasets such as COCO or YT-VOS and fine-
tuned on the target dataset (e.g. DAVIS17). Most
methods assume that the training dataset is large
enough to contain every video feature that could be
evaluated during inference. Since SVOS is a class-
agnostic task, the training should allow the model to
segment images in any context. However, a limited
dataset (even a very large one) cannot explicitly con-
tain every possible situation.
We consider that the decision boundaries induced
by the training pipeline have been fitted considering
the large training dataset which trains the model with
a wide range of features but the features are also
sparse for any specific video. Because of the wide
and sparse training, the decision boundary might not
fit perfectly to a specific video of a limited subject and
very specific information is needed for precise seg-
mentation. To that end we propose to adapt the model
to make it fit better to a specific video.
Our method is based on the observation that dur-
ing inference, the first frame represents the rest of the
video better than the videos that belong to the training
dataset. Our goal is therefore to use specific informa-
tion from the first frame in order to adapt the trained
model to the specific video during inference. How-
ever, such adaptation must be done carefully, as we
show in our experiments, because standard and even
targeted fine-tuning may not be effective for a video
during inference. One has to consider that fine-tuning
30
Dubuisson, I., Muselet, D., Ducottet, C. and Lang, J.
Targeted Test Time Adaptation of Memory Networks for Video Object Segmentation.
DOI: 10.5220/0013108500003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 3: VISAPP, pages
30-38
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

with the first frame may lead to overfitting, which re-
duces the effectiveness of the model for subsequent
frames. We also investigate how to use the remaining
frames during inference without ground truth.
Our contributions are as follows: 1) We propose
a very lightweight predecoder consisting of a sin-
gle 1 × 1 layer that is targeted at the bottleneck of
a segmentation network which can increase the per-
formance of a memory-based SVOS model while re-
quiring only minimal on-line training. We demon-
strate that the predecoder in our targeted adaption out-
performs even full fine-tuning of the decoder in the
SVOS model but requires far less effort. Our targeted
predecoder focuses the widely trained model on the
specific context of the video given by the first frame
and its annotation. 2) We demonstrate that our tar-
geted test-time adaptation is compatible with on-line
self-supervised improvement of features stored in the
memory of the model. Our memory mask adaptation
improves key frame segmentation results before the
key frame features are stored in memory. We explain
the success of our memory mask adaptation with the
increase in the precision of the decision boundary be-
tween the segmented objects and their background.
Memory mask adaption visually improves the border
of the segmentation mask.
2 RELATED WORK
Segmentation in video has been extensively studied in
the last decade, with the emergence of new tasks, in-
cluding Semi-Supervised Video Object Segmentation
(SVOS), on which we will focus. SVOS requires the
first frame to be annotated at test time, but is very flex-
ible in terms of the object of interest, more than many
other related tasks ((Gao et al., 2022; Zhou et al.,
2022)). Other tasks segment the primary moving ob-
ject (Liu et al., 2024; Zhou et al., 2021), any object
belonging to a predefined semantic class (Yang et al.,
2019; Lin et al., 2021), all objects (Cheng et al., 2023;
Wang et al., 2023a), or according to a prompt (Ravi
et al., 2024; Hu et al., 2024).
2.1 Semi-Automatic Video Object
Segmentation
Several approaches to address SVOS have been ex-
plored. Some methods find the object in the current
frame given the first frame annotation in a segmenta-
tion approach (Oh et al., 2018; Li et al., 2019), while
other methods propagate the annotation from frame
to frame using optical flow (Khoreva et al., 2019; Su
et al., 2023) or similarity. State-of-the-art methods
use a memory of past frames, either by storing key
features (Oh et al., 2019; Wang et al., 2021; Cheng
and Schwing, 2022; Cheng et al., 2021), or by gener-
ating a global representation of the object throughout
the video (Chen et al., 2020), to achieve better consis-
tency by considering the possible appearance changes
that may occur in the video.
2.2 Test-Time Adaptation
In the context of video object segmentation, reduc-
ing the domain shift between the large training set
and the current test video has been the main goal of
many recent approaches (Liu et al., 2024; Colomer
et al., 2023; Dubuisson et al., 2023; Bertrand et al.,
2024). The most straightforward solution consists
in applying classical unsupervised domain adaptation
approaches (Colomer et al., 2023; Su et al., 2023) that
require to feed the model with both source and tar-
get data. These solutions are not applicable when the
source data is not available at test time. Some alter-
natives (Liu et al., 2024; Su et al., 2023) exploit the
self-supervision framework to avoid using the source
data but either they are based on a heavy adversarial
student-teacher training (Su et al., 2023) or require to
predict additional features such as depth (Liu et al.,
2024).
Many methods fine-tune the whole model at test-
time (Caelles et al., 2017; Paul and Leibe, 2017; Yuxi
et al., 2020). The labels used for fine-tuning are ei-
ther only the ground truth mask provided on the first
frame (Caelles et al., 2017) or also the most confident
predicted masks for the other frames (Paul and Leibe,
2017). In this latter case, the negative examples are
selected in the areas that are far from the predicted
mask areas in the image space. Obviously, finetun-
ing the whole model at test time is not efficient and
meta-learning solutions exist to provide the best ini-
tialization state and hyper-parameters for a given test
video (Tim and Leal-Taix
´
e, 2020). Other approaches
rather propose to concentrate on the bottleneck of the
encoder-decoder architecture for finetuning the net-
work (Bhat et al., 2020; Robinson et al., 2020; Liu
et al., 2021). Their idea is to insert a light target net-
work before the decoder in order to provide adapted
accurate features that help the decoder to reconstruct
the segmentation mask. Unfortunately, since this tar-
get network modifies the dimension and structure of
the features that feed the decoder, this solution does
not allow to exploit the default pre-trained decoder
and requires to re-train a new specific one. Never-
theless, convinced that the bottleneck is the correct
place to fine-tune, we propose to build on this idea
by adding a tiny predecoder that can be adapted very
Targeted Test Time Adaptation of Memory Networks for Video Object Segmentation
31

Predicted
mask
F
K
F
0
Memory
Cross
attention
E
Q
D
...
...
E
M
Previous
predictions
Current
query
Figure 1: General memory-based pipeline. The query frame is encoded and concatenated with specific memory features
thanks to a cross attention module. The memory update frequency is a fixed parameter K. Note that the mask information is
provided by the previous memory features.
efficiently on the given test video without modifying
the structure or dimension of the decoder input. Note
that Dubuisson et al. propose to fine-tune the key fea-
tures used for affinity computation between the cur-
rent frame and the memory which also takes place at
the bottleneck without modifying the decoder input
dimensions (Dubuisson et al., 2023).
Since the only available ground truth in the con-
text of SVOS is the mask of the first frame, few ap-
proaches propose to resort to time-backward predic-
tions in order to check that the current fine-tuned net-
work is still able to accurately predict the mask of the
first frame (Bertrand et al., 2024; Yuxi et al., 2020).
This solution prevents temporal drift of the segmenta-
tion and we also build on this idea when refining our
predicted masks before storing them in the memory.
Finally, the above related works lead us to de-
sign our method starting from a strong pre-trained
encoder-decoder and consider that:
• the bottleneck is a good place to adapt the features
(from the large training set to the test video),
• the adaptation step should not modify the dimen-
sion and structure of the decoder inputs (other-
wise, the decoder has to be retrained), and
• time-backward prediction is a nice way to control
temporal drifts.
In the next section we detail how our proposed so-
lution leverages these insights.
3 OUR APPROACH
3.1 Method Overview
We focus on memory-based models (Oh et al., 2019)
which are currently the best performing SVOS mod-
els. These models are built upon a encoder-decoder
segmentation pipeline with a memory read module
at the bottleneck (see Fig. 1). This memory read
module is based on a classical cross-attention step
with queries, keys and values (Oh et al., 2019). The
segmentation pipeline is solving a binary (object vs.
background) segmentation task while the memory
read module is continuously enriching the features
from the query frame with object or background fea-
tures thanks to this cross attention mechanism.
More precisely, the memory contains some pre-
vious frames and their corresponding masks encoded
into feature maps (F
0
, F
K
, ...). The memory encoder
E
M
takes as inputs the frames and their predicted
masks and has been trained on the generic dataset.
The memory is initialized with the encoding of the
first frame (frame 0) and its corresponding mask. To
segment the following frames, the memory read mod-
ule first selects some relevant features stored in the
memory (among F
0
, F
K
, ...) and concatenates them
with the current features to enrich the representation.
The memory is periodically updated to add segmenta-
tion information about selected previously segmented
frames (referred to as key frames 0, K, 2K, ..., where
K is a fixed hyperparameter).
Note that these key frames are stored with their
mask prediction inferred by the model. So obviously,
these predictions can be not accurate, although they
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
32

Frame 0
Predicted
mask
F
0
Memory
Cross
attention
E
Q
D
E
M
Groundtruth
mask 0
Loss
Frame 0
Predicted
mask
F
K
Memory
Cross
attention
E
Q
D
Groundtruth
mask 0
Loss
Predicted
mask K
Predecoder
Predecoder Module Adaptation (PMA) Memory Mask Adaptation (MMA)
Figure 2: Our architecture for test-time finetuning. Left: We insert a small predecoder that is trained to predict a good mask
for the frame 0, allowing to adapt the generic features to the current context. The predecoder is trained once on the frame 0
and frozen for all the other steps. Right: Each time a pair frame/mask is inserted in the memory, we adapt the mask so that the
encoded pair promotes a good prediction of the mask of the frame 0, in order to avoid mask drift. The brown arrows represent
gradient back-propagation.
are used to predict the next masks. Also note that
the memory features transferred to the decoder (D)
are selected by the cross-attention module and merged
to the encoded query features (the query encoder is
noted E
Q
in Fig. 1).
One of the great advantages of memory-based seg-
mentation models is their ability to be class-agnostic.
Thus they can segment the correct object across
frames without having learned any representation of
this object during the training of the model. The ob-
ject representation is built online during inference by
storing segmentation information from the first frame
and from some selected previous frames into the
memory. However, memory-based models are sub-
ject to two main problems: imprecise decision bound-
aries of the decoder and lack of consistency of the
memory. Although the decoder has learned generic
visual features from a large and diverse dataset, it is
not perfectly adapted to focus on the current context
of the video, leading to segmentation errors. The lack
of consistency of the memory is due to the fact that
new information added to the memory may contra-
dict initial information and the latter are progressively
masked by recent additions.
We propose to add two online adaptations mod-
ules to overcome these problems:
1. Predecoder Module – a lightweight domain
adaptation layer to slightly adjust the features out-
put from the cross-attention module before trans-
ferring it into the decoder.
2. Memory Mask Adaptation – a back-
propagation-based mask correction to enforce the
consistency of information stored in the memory.
3.2 Predecoder Module Adaptation
(PMA)
The common approach to adapt a model is to finetune
the prediction head, i.e. the last layers of the network.
The reason of this selection is that the last layers con-
tain most of the semantic information. In the cur-
rent SVOS architecture which is an encoder-decoder
model, the semantic information is more likely to be
present at the bottleneck, just before the decoder. In-
deed, the features that feed the decoder (the output
of the cross-attention module) contain the encoded
query and memory features. It’s worth remember-
ing that only the memory features provide binary la-
bels (background vs. object) for the current frame.
These semantic features are fed to the decoder that re-
construct the mask prediction. Since the decoder has
been pretrained on a large dataset, it appears promis-
ing to adapt these input features to the current context
so that the decoder can accurately predict the current
mask. The intuition is that the current decoder has
been trained to reconstruct a wide diversity of features
and we want to force it to concentrate on a small area
of the embedding space, where the current video fea-
tures are located. Thus, we propose to transform the
input features with a simple 1 × 1 convolution layer.
The benefit of choosing such a simple transform is to
prevent overfitting on the first frame, since we want
to avoid the decoder to forget interesting generic fea-
tures. This layer is trained with a cross-entropy loss
on the first frame for which we have the groundtruth
mask (see Fig. 2, left). During training, all the layers
are frozen except the predecoder.
Our predecoder module gives more attention to
the channels that produce better results on the first
frame. Thus, the boundary decision between object
and background segmentation is adjusted with respect
to the first frame. The following frames with close
Targeted Test Time Adaptation of Memory Networks for Video Object Segmentation
33

context to the first frame benefit from this adaptation.
Note that the predecoder is trained only on the first
frame (frame 0) and is frozen for the remainder. We
consider that the first frame is providing enough infor-
mation about the context of the video and the features
selected by the predecoder during this short training
are appropriate for the next frames. Nevertheless, to
avoid overfitting we design a very light predecoder
(one single layer) in order to preserve most of the
generic features provided by the pretrained encoder
model.
3.3 Memory Mask Adaptation (MMA)
As explained above, the memory masks given to the
memory encoder are the only information that define
the specific object to segment in the video. It can be
seen as an instruction to the decoder. For the first
mask in memory, the features rely on the first frame
annotation which is exact. However, as the distance
from the first frame in the video increases, the instruc-
tion become increasingly obsolete. For this reason,
memory-based models update the memory with new
masks predicted by the model itself. However, there
is a risk that the previous predictions will be incorrect
and cause the new predictions to drift, leading to an
increase in error. Because of the prediction saved in
memory, once an element is considered as a target ob-
ject, the model tends to segment it as an object until
the end of the process. To enhance the instructions
stored in memory, we propose to use test-time adap-
tation to learn the logits, non-normalized predictions,
that we use as input to the memory encoder. In or-
der to exploit the single trustfully labels we have (i.e.
those of the first frame 0), we use the segmentation
process backwards in time, and fine-tune the current
mask so that the decoder is able to predict the mask of
the first frame reliably. As illustrated in Fig. 2 (right),
given the current predicted mask and its respective
key frame to be stored in memory, we predict the first
frame mask. Since we have the ground truth for this
first frame mask, we can compute the cross-entropy
loss with the prediction and back-propagate the gra-
dient to fine-tune the current key mask (see Fig. 2,
right) in order to improve the prediction. During this
adaptation, every layer is frozen except the memory
mask that becomes a learnable parameter. This en-
ables us to update the memory mask according to the
error, or uncertainty, that could occur if this mask is
used later as memory. We apply this adaptation at ev-
ery memory update (every K frame).
During this adaptation, temporal distance may
cause the object to appear differently in the current
than in the first frame. In that case, the memory mod-
ule won’t provide good features definition to recon-
struct the object in the current frame. To ensure that
the adaptation can learn properly, we propose to batch
the query with previous memory frames. The mem-
ory mask to adapt will be optimized based on sparse
subset of the past frames. By learning the memory
mask considering a set of frames, we make the mask
more temporally consistent and do not limit the mask
to temporally close frames only.
Note that the memory read module is responsible
of the selection of the memory values for segmenta-
tion. Only the most similar patches will be used and
thus adapted. The backpropagation does not affect
new appearances that haven’t been seen before, and
the model remains flexible with respect to appearance
changes.
4 EXPERIMENTS AND RESULTS
4.1 Model Baseline and Implementation
Details
For the evaluation of our adaptations, we used
STM (Oh et al., 2019) and STCN (Cheng et al.,
2021) as two salient representatives of the mem-
ory based networks. We used the authors’ re-
spective model weights that had been obtained by
pretraining on COCO (Lin et al., 2014) and fine-
tuning on YOUTUBE-VOS (Xu et al., 2018) and
DAVIS17 (Pont-Tuset et al., 2017). We also keep the
memory update frequency suggested by the authors,
every 8 and 5 frames respectively for STM and STCN.
Additionally, only STM uses the previous frame in
memory to predict the actual frame.
During inference every layer is frozen. Only pa-
rameters of interest are unfrozen during their respec-
tive adaptation. The learning of the predecoder is per-
formed only at every first frame initialization, starting
with the identity matrix. Once the adaptation is done,
the segmentation process runs as the authors designed
it to. For this first frame adaptation we use the SGD
optimizer with a learning rate of 0.1 over 100 itera-
tions.
In case of STCN, keys are shared between mem-
ory and query. In our predecoder adaptation config-
uration, keys from query and memory are exactly the
same. Thus, the memory mask will be used directly
in the decoder without complex combination of en-
coder and memory keys, which means the adaptation
will just have to reconstruct the mask encoded in the
memory value without considering the query. To add
more robustness to the predecoder adaptation, we ap-
ply a random shift augmentation between 0 and 8 hor-
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
34
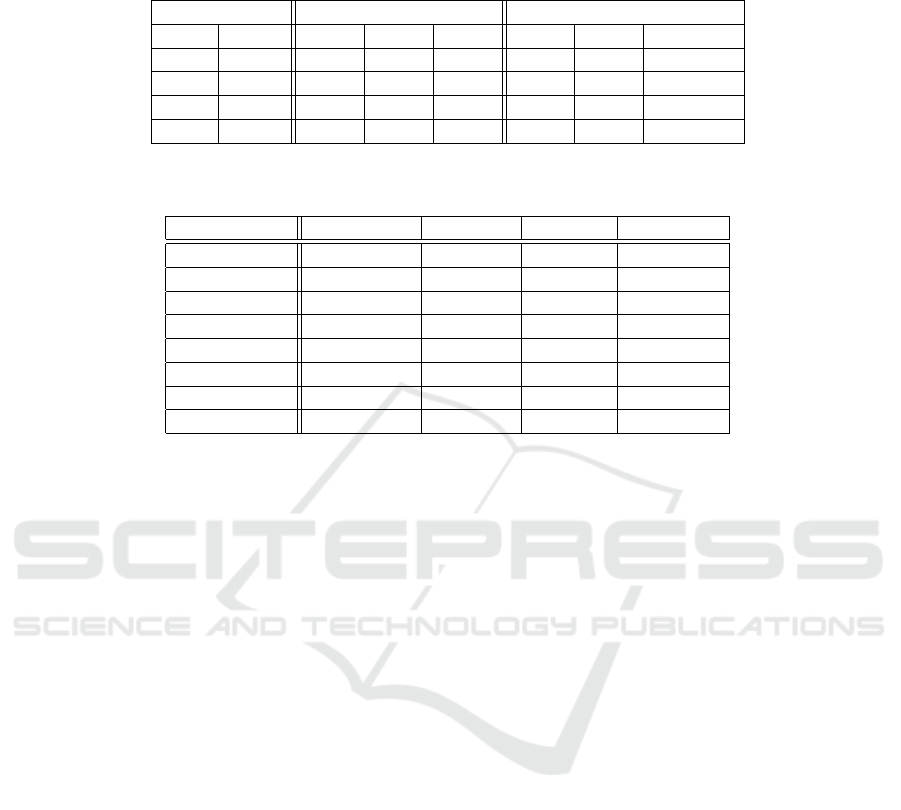
Table 1: Evaluation on DAVIS17 validation in single object configuration. The first line provides the results for the pretrained
model without adaptation. PMA and MMA respectively refers to Predecoder Module Adaptation (Section 3.2) and Memory
Mask Adaptation (Section 3.3).
STM (Oh et al., 2019) STCN (Cheng et al., 2021)
PMA MMA J&F J F J&F J F
78.97 76.30 81.64 83.60 80.50 86.70
✓ 80.46 78.03 82.90 83.73 80.80 86.66
✓ 79.15 76.48 81.83 83.77 80.43 87.12
✓ ✓ 80.52 78.08 82.95 83.68 80.44 86.93
Table 2: Study of different finetuning configurations with different number of iterations. Bold values represent the best results
for each configuration. The used metric is J&F of DAVIS17 with each object separately segmented.
iteration full decoder first layer last layer predecoder
no adaptation 78.97 78.97 78.97 78.97
20 79.96 78.5 78.5 79.05
100 79.02 79.26 79.27 79.05
500 76.84 79.26 77.29 79.43
2000 76.29 78.2 78.25 79.63
10000 64.07 74.39 73.07 80.56
15000 59.92 74.12 71.33 80.56
20000 35.2 69.75 69.73 80.36
izontally and vertically. This allows to shift the patch
from memory and query without interfering with the
video context.
In contrast, the memory mask adaptation is per-
formed every time a new frame is added to the mem-
ory. The adapted mask is used to encode the mem-
ory features but it is not used as prediction output of
the current frame. Memory mask adaptation uses the
cross-entropy loss with SGD optimizer and a learning
rate of 10 over 100 iterations.
4.2 Results
The metric used is J&F, which is the average of In-
tersection over Union (J) with Boundary accuracy (F)
as for the baseline methods. We evaluate the perfor-
mance when a single object is selected by the user.
In case of multiple objects in the video, we evalu-
ate each object separately. This configuration is es-
pecially challenging when the scene contains many
similar objects.
Evaluation of our both online adaptations are re-
ported in Table 1. We compare the baseline methods
with the different configuration of adaptation. Be-
cause they are active at different timestamp in the
videos, we can enable them on the same video. Our
predecoder performs improvement of +1.49% and
+0.13%, respectively on STM and STCN. As ex-
plained by the authors (Cheng et al., 2021), STCN
allows more memory candidates to enrich the query
frame with the memory read module, thus, the mem-
ory combination is more complex and this diversity
improves the decoder’s robustness on prediction. We
believe this explains why our predecoder adaptation
works better on STM than on STCN. The Memory
mask adaptation reaches +0.17% improvement on
both baselines, even though it is performed every 8
frames on STM, and every 5 frames on STCN. Com-
bination of both adaptations results in slight improve-
ments for both baselines. It is the most effective con-
figuration for STM, while for STCN the adaptation
used independently are slightly more effective. In fu-
ture work, we would like to implement ways to han-
dle long videos with possible additional updates of the
predecoder or different management of batch training
on memory mask adaptation.
4.3 Ablation Study
The general approach to adapt a model is to finetune
the whole prediction head or the final layer. In case of
memory-based SVOS methods, the prediction head is
the whole decoder and the final layer is a 2D convo-
lution with a kernel of 3 × 3. To evaluate our prede-
coder, we compared it against the finetuning of the
decoder and of the final layer on the first frame of
the video, like the regular approach (see Table 2).
To argue the need of an additional predecoder mod-
ule (1 × 1 - 2D convolution), we additionally study
the finetuning of the layer located at the same place,
which is the first layer of the decoder (3 × 3 - 2D con-
volution). We finetune the STM model by using the
first frame as both actual and memory frame and ap-
ply the cross-entropy loss with the SGD optimizer and
Targeted Test Time Adaptation of Memory Networks for Video Object Segmentation
35

First frame Frame 6 Frame 12 Frame 24
GT
STM
STM
+ DAM
+ MMA
Ground truth
STM
STM
+ PMA
+ MMA
Figure 3: Qualitative result of Decoder adaptation module and Memory Mask Adaptation on STM.
a learning rate of 1e − 3 (see Fig.2, left).
As shown in Table 2, every finetuning configura-
tion slightly improves the overall result. However,
finetuning the first or the last layer of the decoder
improves the result by only 0.29% and 0.3% respec-
tively and starts to overfit at 100 iterations. Finetun-
ing the full decoder leads to a 0.99% improvement
but starts overfitting earlier at 20 iterations. Our pre-
decoder module outperforms finetuning with 1.59%
improvement and starts overfitting after 10000 itera-
tions. In our experiment, the worst and best results,
corresponding to respectively first layer and prede-
coder, are located at the same place in the decoder but
have different behaviors. We do nbot use an activation
layer between the predecode and decoder and hence
they could fuse into one layer. However, the prede-
coder only adjusts the feature channels while the first
layer has in addition a small receptive field. This be-
havior tends to demonstrate that our predecoder adap-
tation module is more related to a domain alignment
than a regular finetuning problem. In order to make
a trade off between quality and time efficiency we se-
lected a learning rate of 0.1 for 100 iterations to reach
similar result of 80.46% on STM in single object con-
figuration.
4.4 Comparison to State of the Art
To compare our result with state of the art SVOS
methods, we use the DAVIS16 dataset (Perazzi et al.,
2016). Our methods have been implemented only on
single object configuration, so we have to compare on
a dataset that satisfies that constraint. We referenced
best methods that are memory-based or use test-time
adaptation to compare with.
As seen from Table 3, our two adaptations (PMA
and MMA) on top of both STM and STCN pro-
vide very good results which are competitive with the
transformer-based state-of-the-art.
5 CONCLUSION
In this paper, we have proposed a solution to ef-
ficiently finetune a pretrained model in the context
of semi-supervised video object segmentation. First,
we analyzed a generic representation of the memory-
based architectures which outperforms the alterna-
tives architectures for this task. Then, with a pre-
cise analysis of each block, we have identified two
locations of the pipeline that should be adapted to the
given context provided by the test video. The first one
is the input of the decoder. The features at this bottle-
neck represent the most semantic information about
the input frame and should be adapted to the current
context before being decoded. Fortunately, we have
noted that a very light module can adapt these fea-
tures without risking any strong overfitting on the first
frame. This is due to the appropriate position of this
module in the architecture. The second crucial ele-
ment that should be finetuned is the data that is stored
in the memory. Instead of directly storing the con-
secutive mask predictions as it is usually done in this
context, we propose to refine each mask with a time-
backward prediction on the first frame. This allows
to check that the data stored in memory are consistent
with the past and avoids temporal drift. Experiments
on different datasets and different memory-based ar-
chitectures show that this approach improves the re-
sults over the baselines. Tuning the hyper-parameters
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
36

Table 3: Results on Single-Object Segmentation in DAVIS16. ’TTA’ is for Test-Time Adaptation and ’MB’ for Memory-
Based networks. The results are extracted from the original papers.
name tta MB J&F J F
RGMP(Oh et al., 2018) × × 81.8 81.5 82.0
SAT(Chen et al., 2020) × × 83.1 82.6 83.6
OnAVOS(Paul and Leibe, 2017) ✓ × 85.5 86.1 84.9
OSVOS(Maninis et al., 2018) ✓ × 86.0 85.6 86.4
e-OSVOS(Tim and Leal-Taix
´
e, 2020) ✓ × 86.8 86.6 87.0
LucidTracker(Khoreva et al., 2019) ✓ × 85.7 86.6 84.8
SWIFTNET(Wang et al., 2021) × ✓ 90.4 90.5 90.3
XMem(Cheng and Schwing, 2022) × ✓ 92.0 90.7 93.2
ISVOS(Wang et al., 2023b) × ✓ 92.8 91.8 93.8
SwinB-DeAOT-L(Yang and Yang, 2022) × ✓ 92.9 91.1 94.7
FRTM(Robinson et al., 2020) ✓ ✓ 83.5 – –
FAMINet(Liu et al., 2021) ✓ ✓ 82.9 82.4 83.4
STM(Oh et al., 2019) × ✓ 88.9 88.9 88.9
STM w/ PMA ✓ ✓ 89.5 89.3 89.7
STM w/ MMA ✓ ✓ 89.1 89.0 89.1
STCN(Cheng et al., 2021) × ✓ 91.7 90.4 93.0
STCN w/ PMA ✓ ✓ 92.4 91.2 93.5
STCN w/ MMA ✓ ✓ 92.6 91.2 94.0
(learning rate, iteration numbers) used for the finetun-
ing step is not straightforward and we think that our
solution could benefit from recent advances in meta-
learning. This will be our future work.
REFERENCES
Bertrand, J., Kordopatis Zilos, G., Kalantidis, Y., and To-
lias, G. (2024). Test-time training for matching-based
video object segmentation. Advances in Neural Infor-
mation Processing Systems, 36.
Bhat, G., Lawin, F. J., Danelljan, M., Robinson, A., Fels-
berg, M., Van Gool, L., and Timofte, R. (2020).
Learning what to learn for video object segmentation.
In Proceedings of the CVF European Conference on
Computer Vision.
Caelles, S., Maninis, K.-K., Pont-Tuset, J., Leal-Taix
´
e, L.,
Cremers, D., , and Gool, L. V. (2017). One-shot video
object segmentation. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion.
Chen, X., Li, Z., Yuan, Y., Yu, G., Shen, J., and Qi, D.
(2020). State-aware tracker for real-time video object
segmentation. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition.
Cheng, H. K., Oh, S. W., Price, B., Schwing, A., and
Lee, J.-Y. (2023). Tracking anything with decoupled
video segmentation. In Proceedings of the IEEE/CVF
International Conference on Computer Vision, pages
1316–1326.
Cheng, H. K. and Schwing, A. G. (2022). Xmem: Long-
term video object segmentation with an atkinson-
shiffrin memory model. In Proceedings of the CVF
European Conference on Computer Vision.
Cheng, H. K., Tai, Y.-W., and Tang, C.-K. (2021). Re-
thinking space-time networks with improved mem-
ory coverage for efficient video object segmentation.
Advances in Neural Information Processing Systems,
34:11781–11794.
Colomer, M. B., Dovesi, P. L., Panagiotakopoulos, T., Car-
valho, J. F., H
¨
arenstam-Nielsen, L., Azizpour, H.,
Kjellstr
¨
om, H., Cremers, D., and Poggi, M. (2023). To
adapt or not to adapt? real-time adaptation for seman-
tic segmentation. In Proceedings of the IEEE/CVF
International Conference on Computer Vision, pages
16548–16559.
Dubuisson, I., Muselet, D., Ducottet, C., and Lang, J.
(2023). Fast context adaptation for video object seg-
mentation. In International Conference on Com-
puter Analysis of Images and Patterns, pages 273–
283. Springer.
Gao, M., Zheng, F., Yu, J. J., Shan, C., Ding, G., and Han, J.
(2022). Deep learning for video object segmentation:
A review. Artificial Intelligence Review.
Hu, X., Hampiholi, B., Neumann, H., and Lang, J. (2024).
Temporal context enhanced referring video object seg-
mentation. In Proceedings of the IEEE/CVF Win-
ter Conference on Applications of Computer Vision,
pages 5574–5583.
Khoreva, A., Benenson, R., Ilg, E., Brox, T., and Schiele,
B. (2019). Lucid data dreaming for video object seg-
mentation. International Journal of Computer Vision,
127(9):1175–1197.
Li, X., Ma, C., Wu, B., He, Z., and Yang, M.-H. (2019).
Target-aware deep tracking. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition.
Targeted Test Time Adaptation of Memory Networks for Video Object Segmentation
37

Lin, H., Wu, R., Liu, S., Lu, J., and Jia, J. (2021). Video in-
stance segmentation with a propose-reduce paradigm.
In Proceedings of the IEEE/CVF International Con-
ference on Computer Vision, pages 1739–1748.
Lin, T.-Y., Maire, M., Belongie, S., Bourdev, L., Girshick,
R., Hays, J., Perona, P., Ramanan, D., Zitnick, C. L.,
and Doll
´
ar, P. (2014). Microsoft coco: Common ob-
jects in context. In Proceedings of the CVF European
Conference on Computer Vision.
Liu, W., Shen, X., Li, H., Bi, X., Liu, B., Pun, C.-M., and
Cun, X. (2024). Depth-aware test-time training for
zero-shot video object segmentation. In Proceedings
of the IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 19218–19227.
Liu, Z., Liu, J., Chen, W., Wu, X., and Li, Z. (2021).
Faminet: Learning real-time semisupervised video
object segmentation with steepest optimized optical
flow. IEEE Transactions on Instrumentation and Mea-
surement, 71:1–16.
Maninis, K.-K., Caelles, S., Chen, Y., Pont-Tuset, J., Leal-
Taix
´
e, L., Cremers, D., and Gool, L. V. (2018). Video
object segmentation without temporal information.
IEEE Transactions on Pattern Analysis and Machine
Intelligence.
Oh, S. W., Lee, J.-Y., Sunkavalli, K., and Kim, S. J. (2018).
Fast video object segmentation by reference-guided
mask propagation. In Proceedings of the IEEE/CVF
International Conference on Computer Vision.
Oh, S. W., Lee, J.-Y., Xu, N., and Kim, S. J. (2019). Video
object segmentation using space-time memory net-
works. In Proceedings of the IEEE/CVF International
Conference on Computer Vision.
Paul, V. and Leibe, B. (2017). Online adaptation of convolu-
tional neural networks for video object segmentation.
In Proceedings of the British Machine Vision Confer-
ence.
Perazzi, F., Pont-Tuset, J., McWilliams, B., Van Gool, L.,
Gross, M., and Sorkine-Hornung, A. (2016). A bench-
mark dataset and evaluation methodology for video
object segmentation. In Computer Vision and Pattern
Recognition.
Pont-Tuset, J., Perazzi, F., Caelles, S., Arbel
´
aez, P.,
Sorkine-Hornung, A., and Gool, L. V. (2017). The
2017 davis challenge on video object segmentation.
In arXiv preprint arXiv:1704.00675.
Ravi, N., Gabeur, V., Hu, Y.-T., Hu, R., Ryali, C., Ma,
T., Khedr, H., R
¨
adle, R., Rolland, C., Gustafson, L.,
et al. (2024). Sam 2: Segment anything in images and
videos. arXiv preprint arXiv:2408.00714.
Robinson, A., Lawin, F. J., Danelljan, M., Khan, F. S., and
Felsberg, M. (2020). Learning fast and robust target
models for video object segmentation. In Proceedings
of the IEEE/CVF Conference on Computer Vision and
Pattern Recognition.
Su, T., Song, H., Liu, D., Liu, B., and Liu, Q. (2023). Un-
supervised video object segmentation with online ad-
versarial self-tuning. In Proceedings of the IEEE/CVF
International Conference on Computer Vision, pages
688–698.
Tim, M. and Leal-Taix
´
e, L. (2020). Make one-shot video
object segmentation efficient again. In Proceedings of
Advances in Neural Information Processing Systems.
Wang, H., Jiang, X., Ren, H., Hu, Y., and Bai, S. (2021).
Swiftnet: Real-time video object segmentation. In
Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition.
Wang, H., Yan, C., Wang, S., Jiang, X., Tang, X., Hu,
Y., Xie, W., and Gavves, E. (2023a). Towards open-
vocabulary video instance segmentation. In Proceed-
ings of the IEEE/CVF International Conference on
Computer Vision, pages 4057–4066.
Wang, J., Chen, D., Wu, Z., Luo, C., Tang, C., Dai, X.,
Zhao, Y., Xie, Y., Yuan, L., and Jiang, Y.-G. (2023b).
Look before you match: Instance understanding mat-
ters in video object segmentation. In Proceedings
of the IEEE/CVF conference on computer vision and
pattern recognition, pages 2268–2278.
Xu, N., Yang, L., Fan, Y., Yang, J., Yue, D., Liang, Y.,
Price, B., Cohen, S., and Huang, T. (2018). Youtube-
vos: Sequence-to-sequence video object segmenta-
tion. In Proceedings of the CVF European Conference
on Computer Vision.
Yang, L., Fan, Y., and Xu, N. (2019). Video instance seg-
mentation. In Proceedings of the IEEE/CVF inter-
national conference on computer vision, pages 5188–
5197.
Yang, Z. and Yang, Y. (2022). Decoupling features in hi-
erarchical propagation for video object segmentation.
Advances in Neural Information Processing Systems,
35:36324–36336.
Yuxi, L., Ning, X., Jinlong, P., John, S., and Weiyao, L.
(2020). Delving into the cyclic mechanism in semi-
supervised video object segmentation. In Proceedings
of Advances in Neural Information Processing Sys-
tems.
Zhou, T., Li, J., Li, X., and Shao, L. (2021). Target-
aware object discovery and association for unsuper-
vised video multi-object segmentation. In Proceed-
ings of the IEEE/CVF Conference on Computer Vision
and Pattern Recognition.
Zhou, T., Porikli, F., Crandall, D. J., Van Gool, L.,
and Wang, W. (2022). A survey on deep learning
technique for video segmentation. IEEE transac-
tions on pattern analysis and machine intelligence,
45(6):7099–7122.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
38
