
A Constraint Satisfaction Problems Based Scalable Framework to
Address Large-Scale Realistic Scheduling and Routing Problems
Liwen Zhang
a
, Sara Maqrot
b
, Florent Mouysset
c
and Christophe Bortolaso
d
Research and Technological Innovation Department, Berger-Levrault, 64 Rue Jean Rostand, Lab
`
ege, France
fi
Keywords:
Constraint Satisfaction Problem, Scheduling and Routing Problem, Scalable Framework, OptaPlanner,
Meta-Heuristic.
Abstract:
Scheduling and routing solutions for organizational staff , along with decision-making support for timetabling,
have become increasingly complex. This paper addresses the challenges associated with realistic large-scale
generic routing and scheduling problems with a multi-day horizon. We introduce a 2-level scalable framework
featuring a scalable use-case adapter and a scalable optimizer. In optimizer, a Scheduling and Routing Problem
(SRP) model and a configurable constraint system are implemented using OptaPlanner. In the experimentation
section, we present two real-life use cases in Spain and France, involving up to 481 activities to be performed
by 18 staff members over 4 weeks. These scenarios are submitted to our model under different meta-heuristic
configurations. The results demonstrate the achievement of high-quality optimized solutions within a short
computing time of just 8 minutes. Additionally, a detailed investigation is conducted to interpret the scores of
optimized solutions in an understandable manner.
1 INTRODUCTION
In the industrial field, there is a wide diversity of busi-
ness areas that require the optimization of schedul-
ing and routing solutions, considering numerous
business-oriented objectives and strategic rules. Con-
sequently, the generation of scheduling and routing
solutions for staff in a given organization, even pro-
viding the decision-making support for timetabling
decision makers in these organizations, has become
extremely complex. This complexity is evident when
it involves a large number of constraints from various
use cases, such as the well-known Vehicle Routing
Problem and its variants (Caceres-Cruz et al., 2014).
When the large-scale problem has to be figured
out (e.g. 500 activities to schedule within 5 weeks),
we observe that there is a real need for better mod-
eling and solving the scheduling and routing prob-
lems. Since demands vary and the response capac-
ities provided by each service-delivery organization
are no less varied, there is a strong pressure on these
organizations to regularly manage their service flows.
a
https://orcid.org/0009-0003-4692-1956
b
https://orcid.org/0000-0003-2261-4081
c
https://orcid.org/0009-0009-1220-3933
d
https://orcid.org/0000-0002-6635-9345
A scalable scheduling and routing framework along
with the Human Machine Interface (HMI) of an op-
erational product, supports decision-makers in cap-
turing all the necessary knowledge to address op-
erational scheduling and routing challenges. This
framework helps describe the problem by identify-
ing key requirements and gathering necessary infor-
mation from all stakeholders. As the volume of infor-
mation can become significant, integrating this frame-
work into the organization’s information system may
make sense.
In this paper, we address the complexity of
Scheduling and Routing Problems (SRP) in opera-
tional organizations by presenting a scalable two-level
framework designed for real-world SRP. Our contri-
bution is threefold: 1) we investigate the key con-
cepts of SRP over various time horizons (from one
day to multi-month schedules). We start by drawing
from relevant content in the literature to facilitate the
modeling phase, the second level of our framework.
2) Using data processed by Adapter (the first level
of our framework), we implement an OptaPlanner-
based SRP model, featuring a configurable constraint
system based on the Constraint Satisfaction Problem
(CSP) paradigm. This allows us to efficiently solve
SRP through various meta-heuristic algorithms em-
bedded in OptaPlanner. As far as we know, no stud-
Zhang, L., Maqrot, S., Mouysset, F. and Bortolaso, C.
A Constraint Satisfaction Problems Based Scalable Framework to Address Large-Scale Realistic Scheduling and Routing Problems.
DOI: 10.5220/0013109600003893
In Proceedings of the 14th International Conference on Operations Research and Enterpr ise Systems (ICORES 2025), pages 45-56
ISBN: 978-989-758-732-0; ISSN: 2184-4372
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
45

ies have used an OptaPlanner-oriented optimizer to
address real-life SRP that simultaneously optimize
the density of activities assigned at the beginning of
the scheduling horizon and balance the weekly work-
loads of staff members. This is further combined
with traditional constraints such as respecting time
windows and staff unavailability, all within a multi-
day scheduling horizon. 3) For experimental val-
idation, we apply the framework to two real-word
use cases of the Preventive Maintenance Scheduling
and Routing Problem (PMSRP), one in Spain and the
other in France. To the best of our knowledge, an
OptaPlanner-based CSP model for tackling PMSRP
has not been addressed in the literature. We evaluate
and compare the solution quality generated by differ-
ent meta-heuristic algorithms embedded in OptaPlan-
ner.
The remainder of this paper is structured as fol-
lows. Section 2 presents a review of the literature
related to our study. In Section 3, we describe our
proposed scalable framework designed to address the
various SRP. Section 4 provides illustrative computa-
tional experiments and discussion. Finally, some fu-
ture researches are suggested in Section 5.
2 LITERATURE REVIEW
Originally, the Traveling Salesman Problem (TSP) is
a commonly known class in all routing and scheduling
problems. According to (Gutin and Punnen, 2006),
there are many variants of TSP. These authors de-
scribe a set of at least ten variants of this basic formu-
lation, and the main differences arise from the way
objective functions and constraints are approached
within different contexts. For example, minimizing
the total visit cost following a Hamiltonian path in the
Messenger problem (J
¨
unger et al., 1995). (Dantzig
and Ramser, 1959) argue that the family of TSP prob-
lems can be considered as a subclass of the VRP, and
then VRP is identified by (Bektas, 2006) as a “multi-
TSP”. Some variants of the VRP have been exten-
sively studied in recent years. With aging populations
and an increasing life expectancy, Home Health Care
(HHC) has become a common healthcare delivery
manner in Europe. Therefore, HHCRSP is a new VRP
application that considers the variability of business
constraints, along with the diversity of the HHC orga-
nization (Di Mascolo et al., 2021). Furthermore, with
the fourth industrial revolution underway, driven by
Internet of Things (IoT) technology, there is a grow-
ing interest in another widely recognized VRP appli-
cation, the PMSRP, particularly in complex scenarios
involving distributed systems where maintenance as-
sets are geographically dispersed (Rashidnejad et al.,
2018).
Vehicle Routing Problem (VRP) is a well-known
class within Scheduling and Routing Problems (SRP).
By definition, the primary objective of a VRP is to op-
timize the delivery routes of a fleet of vehicles from
a depot to various customer sites, all while accom-
modating a variety of constraints that add complex-
ity to the planning process. These constraints, often
specific to different business fields, include temporal
restrictions, which are especially critical in schedul-
ing and routing. The offer-demand paradigm high-
lights the importance of aligning both customer and
staff satisfaction with respect to time management.
This involves synchronizing individual schedules to
balance the needs and preferences of both parties.
The decision-maker must ensure that the services are
carried out without compromising quality and within
an acceptable operating duration. Frequently, a time
window (referring to a temporal interval specifying
possible starting times for a service) characterizes ei-
ther the customer’s availability or their preferred ser-
vice time (Ibaraki et al., 2005). For normal services,
a temporal tolerance is possible. Hence, two types of
time windows are retained in the literature (Dekhici
et al., 2019): the hard (or fixed) time window or the
soft (or flexible) time window. In (Rest and Hirsch,
2016), the authors focused on the working hours of
the staff. Over a weekly horizon, for instance, if a
staff signs a 25-hour-per-week contract, a maximum
daily working time may also influence the definition
of their schedule. A time interval can be applied to in-
dicate the earliest start time and the latest finish time
of the staff’s daily working rounds (Di Gaspero and
Urli, 2014). To reduce fatigue and increase work ef-
ficiency, a daily lunch break is considered in (Coelho
et al., 2016).
Decision-makers must define directions within
their decisions, specifying the objectives to be
achieved or the risk to be avoided. A frequently used
minimization criterion in this context is travel time
(Dekhici et al., 2019), where total transportation costs
are minimised in (Nguyen et al., 2022). When staff
work capacities are exceeded, overtime costs become
a significant concern. (Carello and Lanzarone, 2014)
aim to reduce the overtime costs of daily workers.
To ensure staff satisfaction, workloads must be bal-
anced. (Yalc¸ında
˘
g et al., 2016) apply utilization rates
to achieve personal workload balance. These rates
compare actual workload to theoretical work capac-
ity. In (Quintanilla et al., 2020), the authors focus
on balancing the number of visits performed by each
staff.
The choice of resolution methods varies depend-
ICORES 2025 - 14th International Conference on Operations Research and Enterprise Systems
46

Figure 1: Overview of SRP framework architecture.
ing on the mathematical nature of the target problem.
Selected resolution methods are highly tailored to
specific types of routing and scheduling problems. In
Operations Research (OR) related research, two main
approaches are explored: exact methods and approx-
imate methods. Exact methods face challenges when
addressing real-life use cases due to the sensitivity of
their Integer Linear Programming (ILP) based mathe-
matical models to problem size. Several mathematical
programming solvers, such as CPLEX and Gurobi,
employ exact methods for solution search. To illus-
trate the size of the problem that can be handled with
exact methods, in (Zhang et al., 2021), CPLEX is
used to solve the daily Home Health Care Scheduling
and Routing Problem (HHCSRP) based on ILP, with
a size of up to 61 activities per day. However, when
the size of the problem exceeds 61 activities, with the
constraints considered in the model, CPLEX cannot
find the optimal solution within the predefined max-
imum computation time of 10 hours. In such cases,
approximate methods are valuable for solving large-
size problems with numerous constraints in various
business contexts. These methods, based on meta-
heuristic algorithms, provide reliable alternatives to
exact methods thanks to their capacity to efficiently
explore vast search spaces within reasonable compu-
tation times. These approximate algorithms incorpo-
rate mathematical models for problem-solving, either
directly or through Constraint Programming model-
ing. They are then coupled with meta-heuristic al-
gorithms such as Simulated Annealing (Kirkpatrick
et al., 1983) or Tabu Search (Glover and Laguna,
1998) to generate near-optimal solutions. Although
few articles mention the use of approximate solvers
for large-scale scheduling and routing problems, ex-
amples such as (Smirnov and Shilov, 2010) highlight
the application of approximated methods embedded
in the Choco solver to address real-life dynamic logis-
tics problems. Furthermore, in (Zhang et al., 2023),
OptaPlanner is used to tackle the daily HHCSRP with
a size of up to 130 activities per day.
In conclusion, addressing scheduling and routing
challenges involves managing the trade-off between
problem complexity (diverse constraints and decision
variables) and computational time for solution gen-
eration. Despite the approximation methods existing
in previous research, the resolution of real-world in-
dustrial problems remains a persistent challenge due
to their significant scale, diversity, and dynamic con-
straints in various application scenarios.
3 SCALABLE FRAMEWORK TO
ADDRESS REAL-WORLD
SCHEDULING AND ROUTING
PROBLEMS
Drawing on insights from the literature review, we
present a scalable framework to address the chal-
lenges related to computational time and scheduling
requirements in real-world SRP.
3.1 Architecture Overview
Our optimization framework consists of two mod-
ules, the (Adapter) and the (Optimizer), which to-
gether form a consistent architecture. This framework
provides a generative solution to the SRP. Figure 1
presents an overview of the linear process that tra-
A Constraint Satisfaction Problems Based Scalable Framework to Address Large-Scale Realistic Scheduling and Routing Problems
47
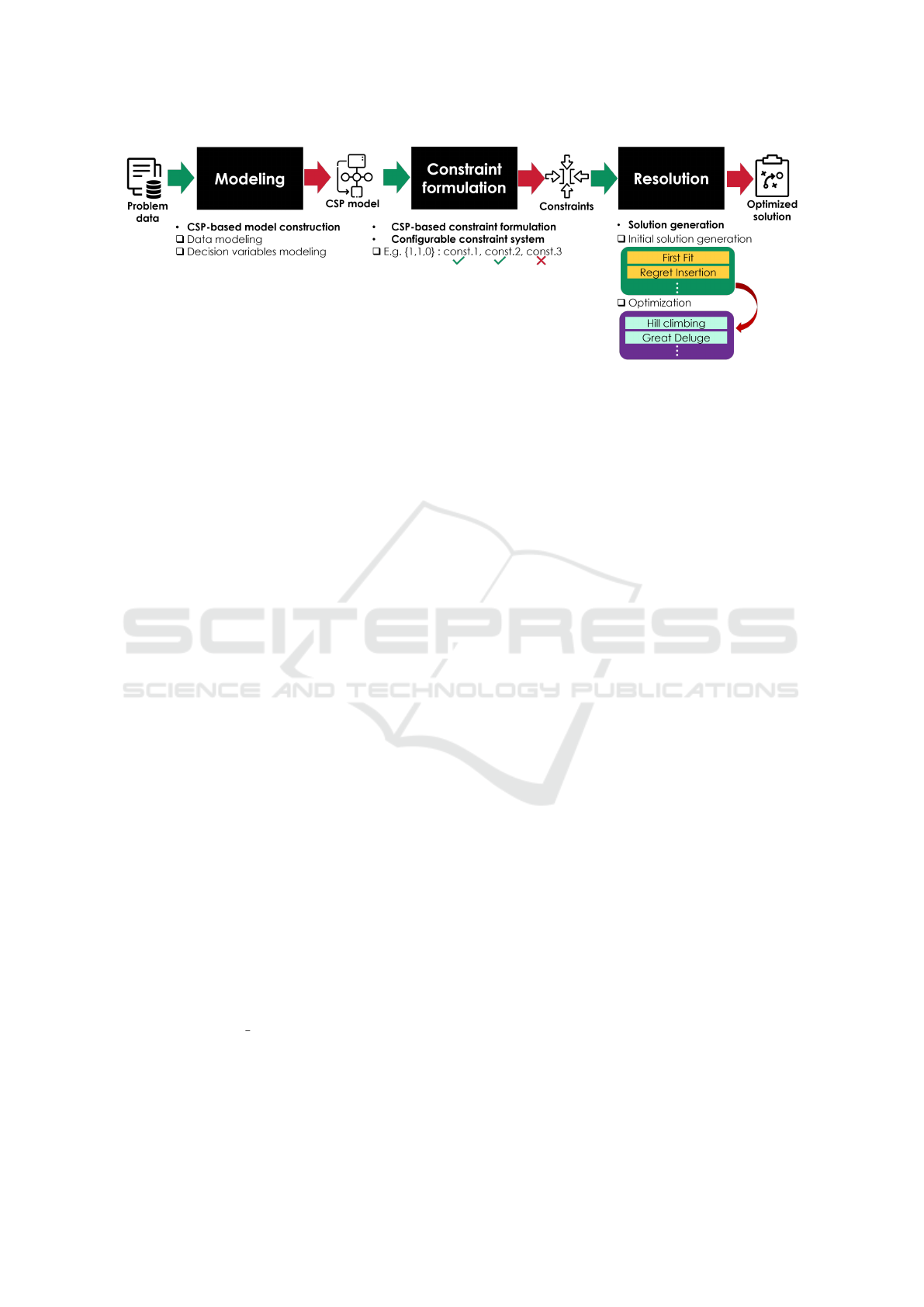
Figure 2: Illustration of three-level process in Optimizer of the scalable framework.
verses the two modules. At the end of this process, the
scheduling and routing solution is obtained in a well-
formatted JSON file, which can be used to display the
optimized solution via a calendar or map view of a
web application.
The first module (Adapter) is responsible for an-
alyzing web requests from various business prod-
ucts related to different scheduling problems. It per-
forms data structure adaptation and conversion to
the generic API of the second module (Optimizer).
The API defined in this module allows users to ac-
tivate or deactivate embedded constraints as needed.
This module can include different adapters for vari-
ous use cases from related products, such as the PM-
SRP adapter for the Preventive Maintenance Schedul-
ing and Routing Problems. Additionally, this module
is scalable to meet the scheduling and routing require-
ments of new products.
In the second module (Optimizer), the previously
translated data from the corresponding adapter is used
to optimize solutions with either an open-source or a
commercial solver. Currently, only one open-source
AI solver, OptaPlanner, is developed to perform SRP
optimization, following a three-level process, as illus-
trated in Figure 2:
1. Modeling. Based on the CSP paradigm, as shown
in Figure 3, an SRP model is constructed. Each
concept is defined with its necessary parameters,
and the relationships between these concepts are
specified. Importantly, the decision variables (an-
notated by @ShadowVariable or @PlanningList-
Variable) are indicated in the concepts annotated
by @PlanningEntity. This part is detailed in Sec-
tion 3.2.1. Note that the attribute names shown in
the figure after “ ” correspond to the annotation
used in Section 3.2.1.
2. Constraint Formulation. Based on the SRP
model, a series of constraints is pre-formulated.
These constraints can be activated or deactivated
based on feedback from the adapters. The formu-
lation of these constraints is detailed in Section
3.2.2.
3. Resolution. The SRP is resolved using the ap-
proximate methods embedded in OptaPlanner, as
detailed in Section 3.2.3.
It is important to note that this module is also scal-
able, allowing for the integration of new solvers to
benchmark against OptaPlanner’s performance. This
three-level process is illustrated in Figure 2.
OptaPlanner is selected as the first solver devel-
oped in this module due to its open-source nature
and its intuitive annotation system for constructing
CSP-based models. The OptaPlanner annotation sys-
tem is detailed in our previous research work (Zhang
et al., 2023). Additionally, the numerous embedded
construction heuristics and local search-based meta-
heuristics enable us to select the appropriate combina-
tion of algorithms to tackle various problems. Finally,
OptaPlanner is fully written in Java, which facilitates
its integration into our architecture, driven by Spring
Boot on the backend.
3.2 Optimizer Description
3.2.1 Modeling
(A) Data Model
Definition 1: Office is the central entity in our system,
denoted by O and defined by the following parame-
ters:
• g: Planning granularity (in seconds), serving to
convert all time-related parameters into integer
slot format. E.g. if dur
a
= 1 and ω = 60, then
the operation time of activity a is 60 seconds.
• h: Number of days in scheduling horizon.
• p: Number of activities to be scheduled within h.
• q: Number of available staff members within h.
ICORES 2025 - 14th International Conference on Operations Research and Enterprise Systems
48
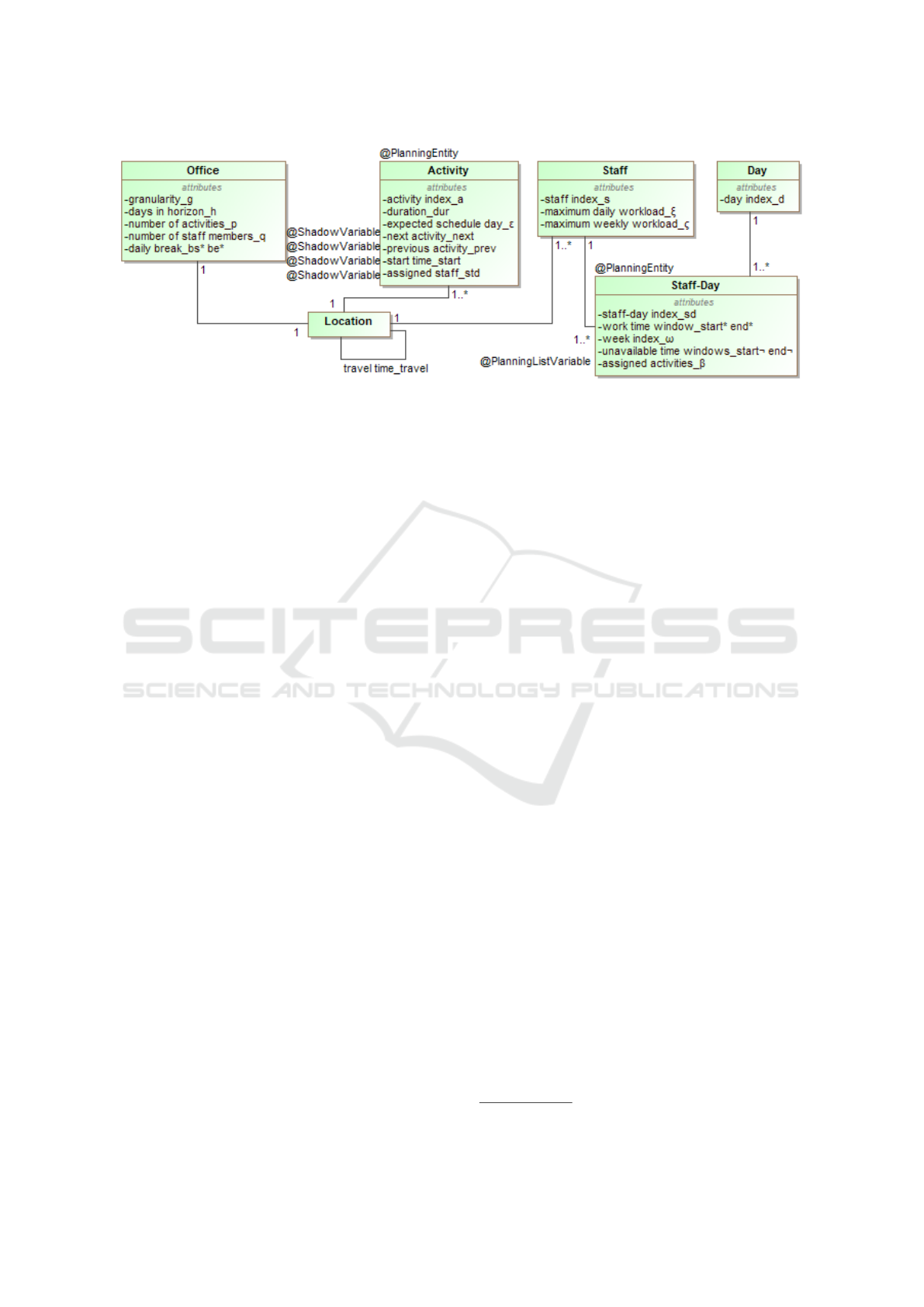
Figure 3: Overview of OptaPlanner-based SRP model.
• [bs
∗
,be
∗
]: Time window for a daily break.
Definition 2: Activity is the primary planning entity
in our model, representing client-requested activities,
denoted by A = {a
1
,..,a
p
] and defined by :
• dur
a
: Operation time required for activity a, in-
cluding the time to park, where. dur
a
∈ [1,∞]
• ε
a
: Expected schedule day requested for activity
a (for horizon h > 1 ).
Definition 3: Staff-Day is a planning entity associated
with Staff and Day, representing the set of available
staff members for deployment on a given day within
the scheduling horizon. Each Staff-Day element cor-
responds to a single workday of a staff member.
• Staff is denoted as S = {s | s ∈ S, |S| = q}, each
element s ∈ S is characterized by :
– ξ
s
: Maximum daily workload.
– ς
s
: Maximum weekly workload.
• Day is denoted as D = {d | d ∈ D, |D| = h}.
• Staff-Day is denoted as SD = {sd | sd ∈
SD, |SD| = α
∗
} , where α
∗
= q · h represents the
total number of available staff members within the
daily horizon. Each sd ∈ SD is characterized by
the following parameters:
– [start
∗
sd
,end
∗
sd
]: Work time window for staff
member s on day d.
– ω
sd
: Week index within the horizon.
– [start
¬
sd
,end
¬
sd
]: Unavailable time windows for
staff member s on day d.
Definition 4: Location is an entity associated with Of-
fice, Activity and Staff-Day, as depicted in Figure 3,.
It determines their respective locations, which are es-
sential for calculating travel time. Location is denoted
by L and characterized by:
• travel
i j
: Travel time from i to j, with i, j ∈
[1, p] ∪ [1,q] ∪ {0}, where {0} represents the of-
fice. travel
i j
is computed using the Origin-
Destination cost matrix solver from ESRI
1
con-
sidering real-life traffic conditions.
(B) Decision Variables in Planning Entity
As illustrated in Figure 3, Activity A and Staff-Day
SD are annotated with @PlanningEntity, allowing for
changes during the solution search process. Decision
variables are the attributes within these entities that
can change values. For a comprehensive exploration
of the optimization model-oriented annotation system
in OptaPlanner, refer to (Zhang et al., 2023).
For each sd ∈ SD, there exists a planning list
variable denoted by β
sd
, which serves as the pri-
mary variable containing multiple chained activities
a ∈ A = {a
1
,.., a
p
}. This variable allows each activ-
ity a ∈ β
sd
to link directly to another, establishing an
order among the planned entities. The chain begins
at the start location of sd ∈ SD and ends with the last
element of the list β
sd
.
The travel time is calculated between each pair of
elements in β
sd
. However, the last travel time in the
list β
sd
is calculated from the final element in β
sd
to
the end point of the daily round of s, which can be the
office location or the domicile location of s.
The following requirements guide the construc-
tion of a chain in this model :
• Each chain is open-ended and does not form a
loop. Figure 4 illustrates an example of a correct
chain (Chain 1) and an incorrect looping chain
(Chain 3).
• A chain is linear, not a tree. Therefore, each sd ∈
SD has only one a ∈ β
sd
at the end of the chain. In
Figure 4, we illustrate an incorrect tree structure-
based chain (Chain 4).
• sd ∈ SD with β
sd
= ∅ is also considered a 0-chain.
1
ESRI: https://www.esri.com/en-us/home
A Constraint Satisfaction Problems Based Scalable Framework to Address Large-Scale Realistic Scheduling and Routing Problems
49

• Only one round is allowed for sd ∈ SD, corre-
sponding to β
sd
= 1.
• When [bs
∗
,be
∗
] is defined within an Office setting,
a chain can be viewed as a two-part sequence. The
first part begins at sd ∈ SD and ends at a
1
∈ A
with a termination time ≥ bs
∗
. The second part
starts at a
2
∈ A, where a start time equal to be
∗
+
travel
a
1
,a
2
, and ends at another point, a
3
∈ A. This
two-part chain is illustrated in Figure 4 as Chain
2.
For each a ∈ A, four decision variables are de-
fined. These secondary variables, referred to shadow
variables in the OptaPlanner ecosystem, depend on
the primary variable β
sd
, sd ∈ SD. A shadow variable
is a planning variable whose value can be deduced
from the state of β
sd
. The definitions of the four deci-
sion variables are as follow :
• next
a
: The next activity following activity a in
a staff’s daily round, with the domain next
a
=
{a
1
,a
2
,..., a
p
}
• prev
a
: The previous activity preceding activity a
in a staff’s daily round, with the domain prev
a
=
{a
1
,a
2
,..., a
p
}
• start
a
: The start time of activity a within a day,
with the domain start
a
= [0,86400/g]
• std
asd
: The assigned staff s for staff-Day sd for ac-
tivity a, with the domain of std
asd
= {s
1
,s
2
,..., s
q
}
3.2.2 Constraint Formulation
All constraints stated in this section are enabled or
disabled based on the different context of the tar-
get SRP. In our model, there is no objective func-
tion to characterize solution quality. Instead, each
constraint is linked to a hard or soft score based on
its violation. Consequently, a solution is defined by
a global score, where the hard part is denoted by
Λ =
∑
{hard scores for each constraint}, and the soft
part by Ω =
∑
{soft scores for each constraint}. The
presence of a hard score indicates an infeasible solu-
tion, while the goal is to maximize the soft score. The
higher the score, the higher the overall score, indicat-
ing a better solution.
Furthermore, a list of binary values is required
in the format {1,1,1,1,0,0,0,0,0}. This list indicates
that constraints (1)-(4) are activated, while constraints
(5)-(9) are deactivated. It represents the necessary
constraints for a target SRP, generated by the corre-
sponding adapter based on the request from the re-
lated product.
Constraint (1) ensures that all care services are as-
signed to a staff member during the day, thereby pro-
hibiting any missing activities in the target use case.
If std
asd
= ∅ ∨ start
a
= ∅ Then Λ − 1
∀a ∈ A,∀sd ∈ SD
(1)
Constraint (2) ensures that each activity is sched-
uled within the working time window of staff member
s on day d.
If (start
a
≥ end
∗
sd
) ∨ (start
a
+ dur
a
> end
∗
sd
)
∨ (start
a
< start
∗
sd
) Then Λ − 1
∀a ∈ A,∀sd ∈ SD
(2)
Constraint (3) prohibits scheduling activities dur-
ing the designated unavailability of the staff member
s on day d.
If ((start
a
≤ start
¬
sd
) ∧ (start
a
+ dur
a
≥ end
¬
sd
))
∨ ((start
a
> start
¬
sd
) ∧ (start
a
+ dur
a
< end
¬
sd
))
∨ ((start
a
+ dur
a
≥ start
¬
sd
)
∧ (start
a
+ dur
a
≤ end
¬
sd
))
∨ ((start
a
≥ start
¬
sd
) ∧ (start
a
≤ end
¬
sd
)
Then Λ − 1 ∀a ∈ A,∀sd ∈ SD
(3)
Constraint (4) ensures that the total workload of
the staff member s does not exceed the maximum
daily limit ξ
s
.
If
∑
i∈β
sd
∑
j∈β
sd
∪std
asd
:
i̸= j, j=i+1
(travel
i j
+ dur
i
) > ξ
s
Then Λ− | ξ
s
−
∑
i∈β
sd
∑
j∈β
sd
∪std
asd
:
i̸= j, j=i+1
(travel
i j
+ dur
i
) |
∀a ∈ A,∀s ∈ S, ∀sd ∈ SD
(4)
Constraint (5) aims to align the overall workload
of the staff member s as closely as possible with the
weekly maximum limit ς
s
.
If
∑
i∈β
sd
∑
j∈β
sd
∗
∪std
asd
∪ω
sd
=ω
sd
∗
:
i̸= j, j=i+1
(travel
i j
+ dur
i
) > ς
s
Then Ω− | ς
s
−
∑
i∈β
sd
∑
j∈β
sd
∗
∪std
asd
∪ω
sd
=ω
sd
∗
:
i̸= j, j=i+1
(travel
i j
+ dur
i
) |
∀a ∈ A,∀s ∈ S, ∀sd, sd
∗
∈ SD
(5)
Constraint (6) ensures that activity a with ε
a
̸= ∅,
is scheduled as closely as possible to the expected
schedule day.
If ε
a
̸= ∅ Then Ω− | ε
a
− {d | d ∈ std
asd
} |
∀a ∈ A,∀sd ∈ SD
(6)
ICORES 2025 - 14th International Conference on Operations Research and Enterprise Systems
50
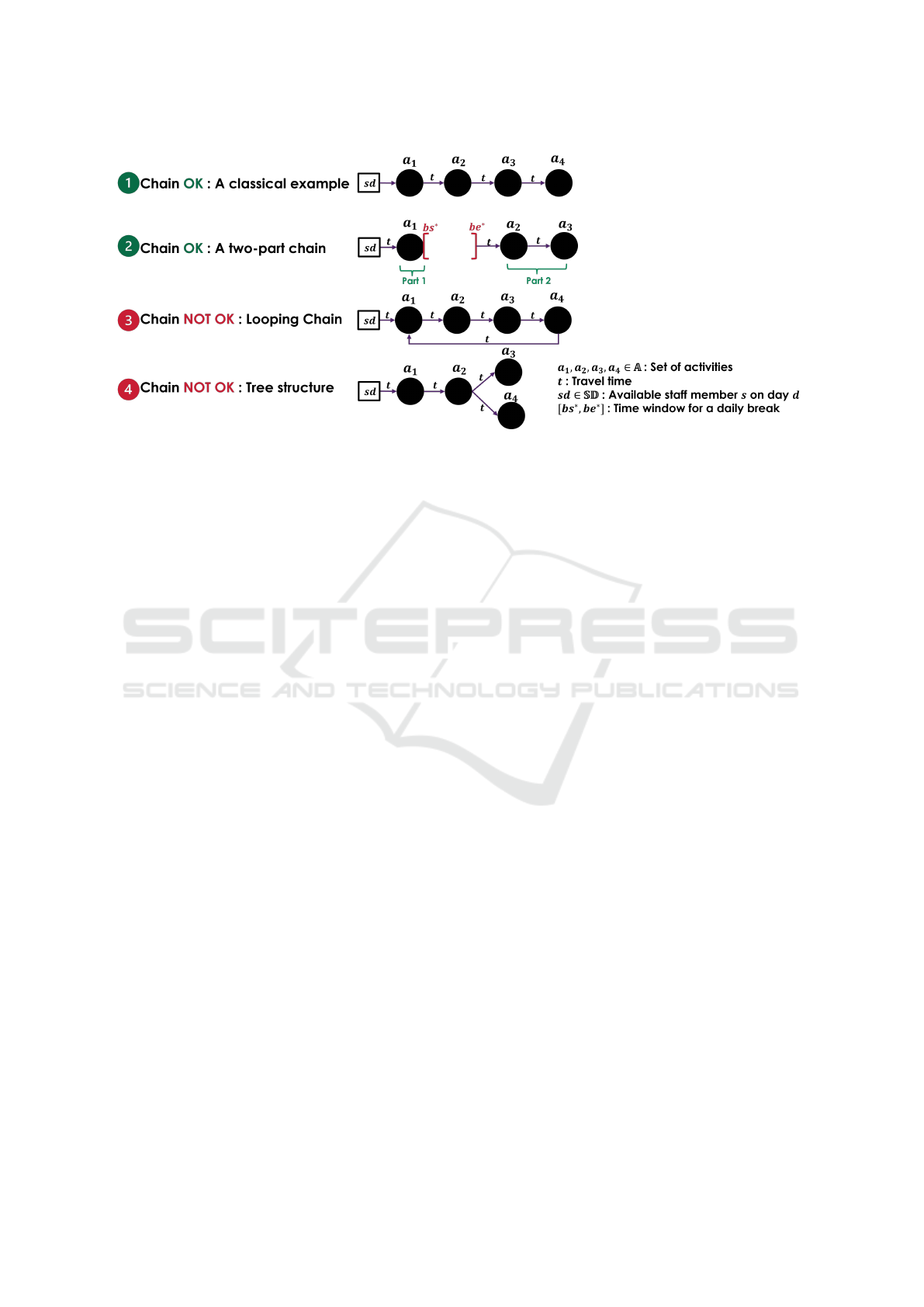
Figure 4: Illustration of the chain-based planning list variable β
sd
, for sd ∈ SD.
Constraint (7) minimizes the total travel times of
all staff members, operating without any conditional
requirements.
Ω−
∑
i∈β
sd
∑
j∈β
sd
∪std
asd
:
i̸= j, j=i+1
travel
i j
∀a ∈ A,∀sd ∈ SD (7)
Constraint (8) optimizes the density of activities
assigned at the beginning of the scheduling horizon.
The main goal is to improve resource efficiency by
reducing inactivity periods among staff, thus creat-
ing additional time slots for the insertion of urgently
added activities. There is no conditional part for this
constraint.
Ω − {d | d ∈ std
asd
} a ∈ A,∀sd ∈ SD (8)
Constraint (9) promotes balance in the weekly
workloads of the staff members, considering the
travel times between assigned activities and staff un-
availability as needed.
If ω
sd
= ω
s
∗
d
∗
Then Ω −
∑
i∈β
sd
∑
j∈β
sd
∪std
asd
:
i̸= j, j=i+1
(travel
i j
+ dur
i
+
| start
¬
sd
− end
¬
sd
|)
−
∑
i
∗
∈β
s
∗
d
∗
∑
j
∗
∈β
s
∗
d
∗
∪
std
a
∗
s
∗
d
∗
:
i
∗
̸= j
∗
, j
∗
=i
∗
+1
(travel
i
∗
j
∗
+ dur
i
∗
+
| start
¬
s
∗
d
∗
− end
¬
s
∗
d
∗
|)
a,a
∗
∈ A,∀sd, s
∗
d
∗
∈ SD
(9)
3.2.3 Resolution
The resolution of the problem in OptaPlanner begins
with the generation of an initial solution using con-
struction heuristics within a limited time frame while
aiming for the best possible quality. OptaPlanner sup-
ports five construction heuristics, including First Fit
and its variants, Weakest Fit and Strongest Fit (Bays,
1977), Allocate Entity from Queue (Semeria, 2001),
Regret Insertion (Diana and Dessouky, 2004), Alloca-
tion from pool (Lattner and Adve, 2002) and Scaling
construction heuristics (Katayama et al., 2009).
The second phase involves iteratively searching
for a solution that outperforms the current one us-
ing meta-heuristic algorithms. OptaPlanner’s config-
uration allows for the selection of optimization algo-
rithms and the definition of their intrinsic parameters.
The optimization process ends when predefined stop-
ping criteria are met, typically defined as reaching ei-
ther a maximum computational time limit or a spe-
cific number of iterations. In addition to construction
heuristics, OptaPlanner offers various types of local
search meta-heuristics:
1. Simple local search: Hill Climbing (Goldfeld
et al., 1966) and Late acceptance (Burke and
Bykov, 2017).
2. Meta-heuristics: Tabu Search (Glover
and Laguna, 1998), Simulated Annealing
(Van Laarhoven and Aarts, 1987), Great Deluge
(Dueck, 1993), and Variable Neighborhood
Descent (Gao et al., 2008).
4 TESTS
In experimental section, we aim to evaluate our target
problems using our framework in various configura-
tions. The configurations of our OptaPlanner-based
optimizer draw inspiration from our previous research
work (Zhang et al., 2023), using the First Fit con-
struction algorithm in conjunction with all the meta-
A Constraint Satisfaction Problems Based Scalable Framework to Address Large-Scale Realistic Scheduling and Routing Problems
51
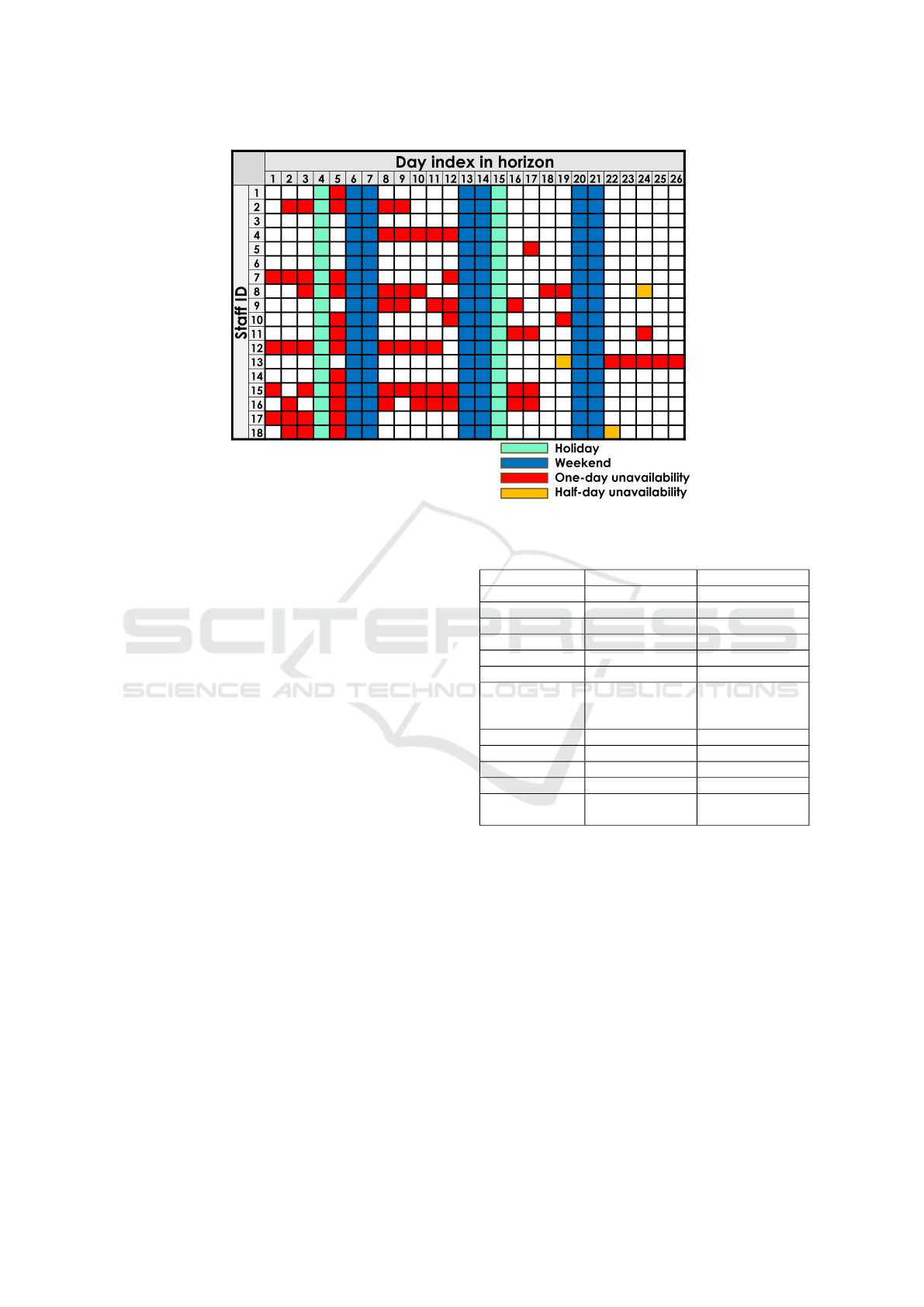
Figure 5: Staff unavailabilities aligned with the day index within the planning horizon for the French use case.
heuristics embedded in OptaPlanner except for Tabu
Search. The choice of First Fit as the construction
heuristic for generating the initial solution is based
on the study conducted by (Macik, 2016), which pro-
vides an in-depth discussion of the configuration of
the solver. This author, who examined the task as-
signment problem, demonstrated that First Fit is the
most effective construction heuristic. Similarly, in the
work of (Rios de Souza and Martins, 2020), First Fit
is also used to construct the initial solution, further
validating its effectiveness. Tabu Search is omitted
from the testing due to the complexity of our identifi-
cation rule for the ID of each planning entity, which
limits the solver’s ability to execute the optimization
process effectively. Additionally, in line with (Zhang
et al., 2023), we utilize two termination criteria: either
when the global score in the form of HardSoftScore
reaches zero in both its hard and soft components,
or when the computation time reaches the predefined
limit of 8 minutes. The choice of an 8-minute time
limit is based on client feedback.
4.1 Realistic Dataset Statement
The dataset was extracted from the database of an op-
erational product used by two Berger-Levrault clients:
one in Spain and the other in France. The Spanish
client (case ES) assigns staff to maintenance tasks on
water network infrastructures. Each staff member be-
gins and ends their daily work at the office, with repair
points located within a city and a relatively short plan-
ning horizon. In contrast, the French client (case FR)
Table 1: Main data for Spanish Case and French Case.
Parameter Values of Case ES Values of Case FR
(O) g 60 60
(O) h 5 26
(O) p 90 481
(O) q 4 18
(O) [bs
∗
,be
∗
] [50400,55800] -
(A) dur
a
see Figure 6 see Figure 6
(A) ε
a
ε
a
1
= 1, ε
a
2
=
2,ε
a
3
= 2, ε
a
4
=
3,ε
a
5
= 5, ε
a
6
= 4
-
(S) ξ
s
- ξ
s
= 32400
(S) ς
s
- ς
s
= 144000
(SD) [start
∗
sd
,end
∗
sd
] [32400,63000] [28800,70200]
(SD) ω
sd
{0} {1,2, 3, 4}
(SD) [start
¬
sd
,end
¬
sd
] [32400,63000],
s = 1,d = 2
see Figure 5
assigns staff to perform maintenance on machines
at various client locations throughout France. Here,
each staff member begins and ends their daily work
at home, with a relatively long planning horizon. The
parameter settings for our model for the case of ES
are listed in column 2 of Table 1, while those for the
case of FR are described in column 3.
Due to the extensive planning horizon and the
frequent unavailability of active staff members, Fig-
ure 5 presents detailed information regarding the pa-
rameter [start
¬
sd
,end
¬
sd
] for the case FR. It is im-
portant to note that the red and blue zones (repre-
senting weekends or holidays) indicate the unavail-
ability of specific staff members throughout the day
([start
¬
sd
,end
¬
sd
] = [28800,70200]). The orange zone
denotes the half-day inaccessibility for staff members
ICORES 2025 - 14th International Conference on Operations Research and Enterprise Systems
52
Table 2: Constraints activated for FR and ES cases.
Constraint# 1 2 3 4 5 6 7 8 9
Case ES 1 1 1 0 0 1 1 1 1
Case FR 1 1 1 1 1 0 1 0 1
Table 3: Comparison of solution scores: case ES.
SA HC LA GD VND
C. 1 0 0 0 0 0
C. 2 0 0 0 -6 0
C. 3 0 0 0 0 0
Λ 0 0 0 -6 0
C. 6 0 0 0 -1 0
C. 7 -341 -562 -1239 -1264 -532
C. 8 -179 -177 -174 -181 -164
C. 9 -244800 -257600 -195200 -3343600 -270000
Ω -245320 -258339 -196613 -3345045 -270696
([start
¬
sd
,end
¬
sd
] = [28800, 43200] ∨ [43200,70200]).
Finally, Figure 6 illustrates the duration distribu-
tions for all activities in two cases.
4.2 Numerical Result
After conducting several interviews to understand the
distinct scheduling requirements of the two clients,
Table 2 illustrates the activated constraints for each
case, with a value of 1 indicating that the correspond-
ing constraint is activated and 0 otherwise.
The test is carried out on a computer with an In-
tel(R) Core(TM) i7-7500U processor at 2.90 GHz and
16.0 GB of RAM under the Windows 10 operating
system. In both use cases, our initial evaluation in-
volves evaluating the hard component (Λ) and the soft
component (Ω) of the overall score for each solu-
tion generated under different meta-heuristic config-
urations in OptaPlanner : Simulated Annealing (SA),
Hill Climbing (HC), Lated Acceptance (LA), Great
Deluge (GD), and Variable Neighborhood Descent
(VND), while utilizing the same constructive algo-
rithm : First Fit. As demonstrated in Table 3 and Ta-
ble 4, we further detail the score generated by each
activated constraint.
Table 4: Comparison of solution scores: case FR.
SA HC LA GD VND
C. 1 0 0 0 0 0
C. 2 0 0 0 0 0
C. 3 0 0 0 0 0
C. 4 0 0 0 0 0
Λ 0 0 0 0 0
C. 5 -4850 -3552 -11448 -12458 -8055
C. 7 -95207 -89320 -112087 -113751 -87368
C. 9 -711408 -883310 -2180250 -3153722 -3130840
Ω -811465 -976182 -2303785 -3279931 -3226263
Examining Table 3 and Table 4, our initial conclu-
sions are:
• Except for the situation where case ES uses GD
for solution generation and fails to find a feasible
solution due to its hard score Λ(caseES,GD) =
−6, all examined meta-heuristics successfully
find feasible solutions for both cases within an
8-minute computing time, even when the size of
case FR is sufficiently large.
• In terms of solution quality for the two tested
cases, as indicated by the soft score Ω, the
best solution for case ES is achieved by LA
with Ω(caseES,LA) = −196613, while for case
FR, SA produces the optimal solution with
Ω(caseFR,SA) = −811465. This demonstrates
that the choice of meta-heuristic for solution gen-
eration depends on the specific use case.
• When analyzing the detailed scores for each ac-
tivated constraint, specifically C.9 for achieving
weekly workload balance, these values signifi-
cantly influence the overall score of each solu-
tion. However, the interpretation of meaning be-
hind this score is unclear. Consequently, we will
introduce an indicator for this constraint later to
better demonstrate its benefit.
For C.9, we assess the balance of workload for
each working week among all staff members who
have completed their assigned tasks. This is done
through the introduction of a new indicator, calcu-
lated using formula (10), which calculates the average
Mean Deviation (MD) of each staff member’s total
workload per day. The formula is represented as:
M
week
=
∑
h
∗
i=1
MD(workload
s
per working day)
h
∗
s ∈ S
(10)
Here, h
∗
refers to the number of working days in
the scheduling horizon, excluding weekends and holi-
days. week refers to the week number within the plan-
ning horizon for each use case.
For the case ES, the scheduling horizon comprises
only 5 days, equivalent to 1 week. Table 5 illustrates
the value M
week
for the solutions outlined in Table 3.
These findings confirm that the use of LA in solution
generation achieves the optimal balance in weekly
workload for all staff members. This is reflected
in M(caseES,LA)
1
= 4.18, with a gap of = 4.18%
compared to the theoretical best value of 0. We ob-
serve that the weekly workload balance for GD seems
to be quite far from other values when compared to
other methods (e.g. : M(caseES,GD)
1
= 58.32 vs.
A Constraint Satisfaction Problems Based Scalable Framework to Address Large-Scale Realistic Scheduling and Routing Problems
53
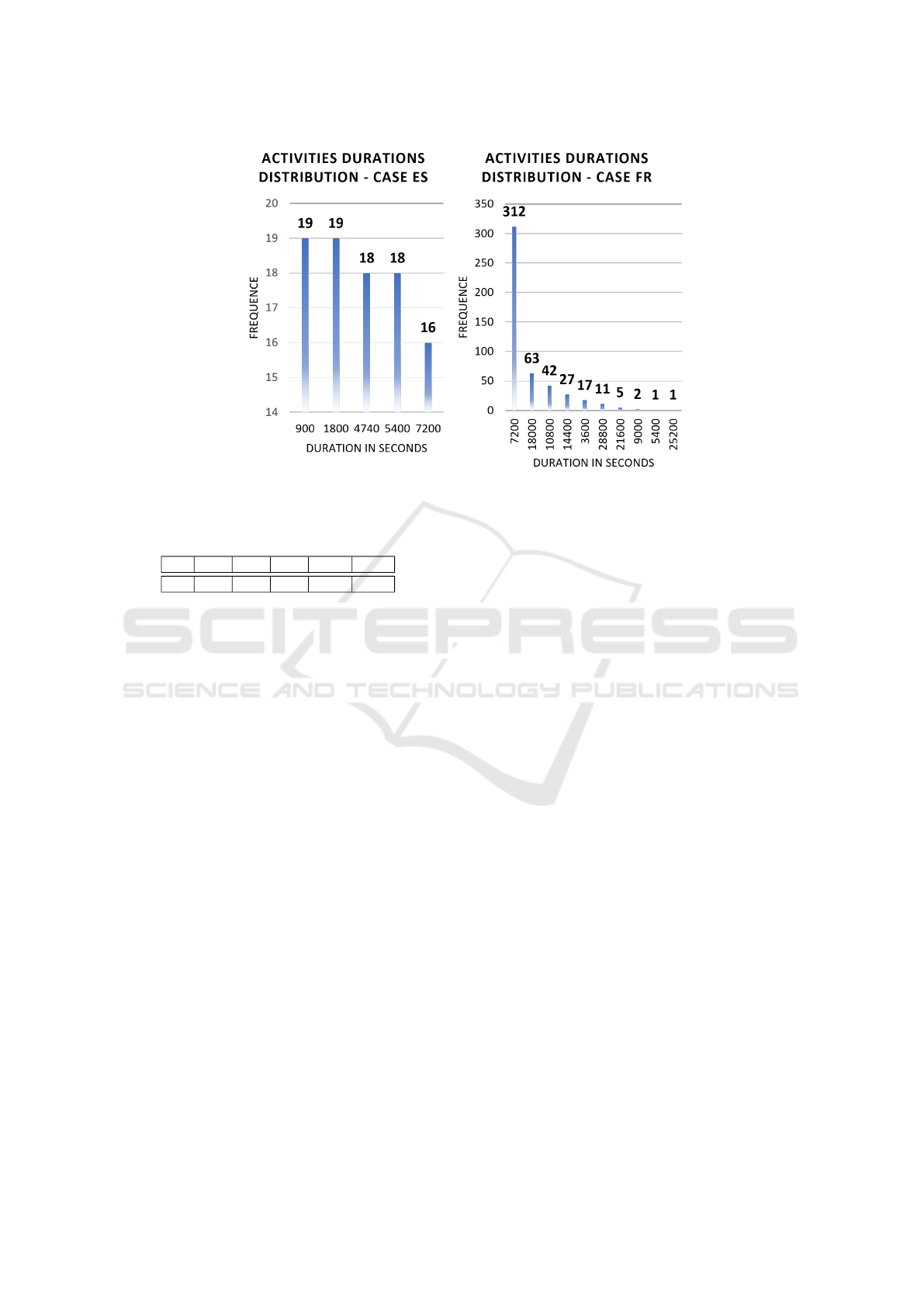
Figure 6: Activities’ duration distributions for two cases.
Table 5: Weekly workload balance analysis: case ES.
SA HC LA GD VND
M
1
5.15 5.55 4.18 58.32 5.46
M(caseES,LA)
1
= 4.18 ). This difference arises be-
cause the final solution score generated by GD is
reached after just 2 minutes of computation, with no
further improvement observed over the remaining 6
minutes. This indicates that GD, when used for so-
lution generation in our model with the given con-
straints of this use-case, results in being entrapped in
local optima.
For the case FR, the scheduling horizon covers 26
days, equivalent to 4 weeks. As shown in Figure 7,
the results confirm that the use of SA in solution gen-
eration achieves the best balance of weekly workload
for all staff members. SA consistently produces the
lowest M
week
over 4 weeks, with respective gaps com-
pared to the theoretical best value of 0:
• gap
week1
= 16.73%
• gap
week2
= 25.73%
• gap
week3
= 11.83%
• gap
week4
= 26.64%
In conclusion, given the numerous staff unavail-
abilities within their workloads, especially for weeks
2 and 4, we observe a significant decentralization of
staff unavailabilities, as shown in Figure 5. Con-
sequently, the optimized solution is less effective in
achieving an optimal weekly workload balance.
5 CONCLUSIONS, DISCUSSIONS
AND FUTURE WORKS
This paper introduces a two-level scalable optimiza-
tion framework designed to address large-scale, real-
world problems with a multi-day horizon. The Op-
timizer is currently conceptualized and implemented
using OptaPlanner, an open-source AI solver based on
Constraint Satisfaction Problems (CSP). To address
diverse scheduling requirements, we propose a scal-
able Adapter to parameterize the configurable con-
straint system within our Optimizer. In the exper-
imental section, we present two real-life use cases
subjected to our OptaPlanner-based Scheduling and
Routing Problem (SRP) model under different config-
urations. The results demonstrate the achievement of
high-quality optimized solutions within a short com-
puting time. In addition, a detailed investigation is
conducted to interpret the scores of optimized solu-
tions in an understandable manner.
For future work, firstly, in terms of experimen-
tation, we plan to expand the experimental results
presented in this paper. This would provide more
comprehensive evidence of the framework’s scalabil-
ity and adaptability across various scenarios. Incor-
porating additional case studies or presenting more
detailed performance metrics under varying condi-
tions (e.g., staff size, scheduling complexity) would
enhance the findings and enable clients to evaluate
the framework’s robustness across a broader spec-
trum of real-world situations. A deeper analysis of
the experimental outcomes is necessary, focusing on
why certain configurations performed better or worse
ICORES 2025 - 14th International Conference on Operations Research and Enterprise Systems
54
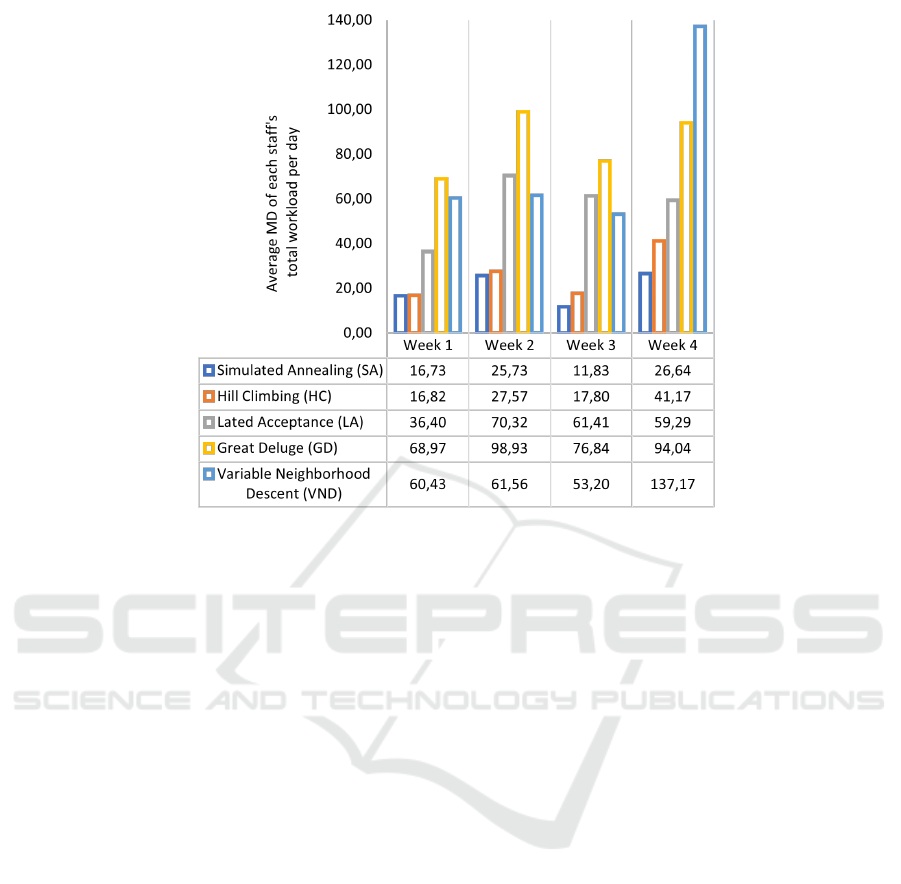
Figure 7: Weekly workload balance analysis : case FR.
and linking these findings to practical implications.
Moreover, a critical reflection on the limitations of
the study (e.g., computational time constraints, spe-
cific constraints that may limit applicability) will lend
transparency and allow for a more balanced interpre-
tation of the results.
Next, we will conduct additional interviews with
other clients to explore their scheduling requirements.
Additionally, assigning weights to each constraint to
reflect their importance for different clients will im-
prove our configurable constraint system, allowing it
to effectively meet additional SRP requirements.
As this work is ongoing, we also plan to integrate
additional solvers into our Optimizer, enabling a com-
parative evaluation of the solutions generated by dif-
ferent solvers. This analysis will help establish the
framework’s competitive advantage and highlight its
unique benefits. Such a comparison will provide users
with a clearer understanding of the framework’s effec-
tiveness relative to existing solutions.
Furthermore, our current resolution approach pre-
sented in this article focuses on combinatorial opti-
mization theories and does not account for uncertain-
ties. Although our approach can efficiently generate
near-optimal solutions, addressing operational uncer-
tainties using stochastic formulations of SRP is chal-
lenging due to the complexity of the problem. To
overcome this limitation, we are considering integrat-
ing our proposed approach with algorithms based on
a multi-agent system. This new direction will en-
able posterior sensitivity analysis by utilizing a multi-
agent system in conjunction with solutions generated
by the optimization process. During this analytical
phase, we can introduce various uncertain variables,
supplementing those already identified in our field ob-
servations, such as uncertainties related to travel du-
ration or staff availability.
REFERENCES
Bays, C. (1977). A comparison of next-fit, first-fit, and best-
fit. Communications of the ACM, 20(3):191–192.
Bektas, T. (2006). The multiple traveling salesman prob-
lem: an overview of formulations and solution proce-
dures. Omega, 34(3):209–219.
Burke, E. K. and Bykov, Y. (2017). The late acceptance hill-
climbing heuristic. European Journal of Operational
Research, 258(1):70–78.
Caceres-Cruz, J., Arias, P., Guimarans, D., Riera, D., and
Juan, A. A. (2014). Rich vehicle routing problem:
Survey. ACM Comput. Surv., 47(2).
Carello, G. and Lanzarone, E. (2014). A cardinality-
constrained robust model for the assignment problem
in home care services. European Journal of Opera-
tional Research, 236(2):748–762.
Coelho, L. C., Gagliardi, J.-P., Renaud, J., and Ruiz, A.
(2016). Solving the vehicle routing problem with
lunch break arising in the furniture delivery industry.
Journal of the Operational Research Society, 67:743–
751.
A Constraint Satisfaction Problems Based Scalable Framework to Address Large-Scale Realistic Scheduling and Routing Problems
55

Dantzig, G. B. and Ramser, J. H. (1959). The truck dis-
patching problem. Management science, 6(1):80–91.
Dekhici, L., Redjem, R., Belkadi, K., and El Mhamedi,
A. (2019). Discretization of the firefly algorithm for
home care. Canadian Journal of Electrical and Com-
puter Engineering, 42(1):20–26.
Di Gaspero, L. and Urli, T. (2014). A cp/lns approach for
multi-day homecare scheduling problems. In Interna-
tional workshop on hybrid metaheuristics, pages 1–
15. Springer.
Di Mascolo, M., Martinez, C., and Espinouse, M.-L.
(2021). Routing and scheduling in home health care:
A literature survey and bibliometric analysis. Com-
puters & Industrial Engineering, 158:107255.
Diana, M. and Dessouky, M. M. (2004). A new regret inser-
tion heuristic for solving large-scale dial-a-ride prob-
lems with time windows. Transportation Research
Part B: Methodological, 38(6):539–557.
Dueck, G. (1993). New optimization heuristics: The
great deluge algorithm and the record-to-record travel.
Journal of Computational physics, 104(1):86–92.
Gao, J., Sun, L., and Gen, M. (2008). A hybrid genetic and
variable neighborhood descent algorithm for flexible
job shop scheduling problems. Computers & Opera-
tions Research, 35(9):2892–2907. Part Special Issue:
Bio-inspired Methods in Combinatorial Optimization.
Glover, F. and Laguna, M. (1998). Tabu Search, pages
2093–2229. Springer US, Boston, MA.
Goldfeld, S. M., Quandt, R. E., and Trotter, H. F. (1966).
Maximization by quadratic hill-climbing. Economet-
rica, 34(3):541–551.
Gutin, G. and Punnen, A. P. (2006). The traveling sales-
man problem and its variations, volume 12. Springer
Science & Business Media.
Ibaraki, T., Imahori, S., Kubo, M., Masuda, T., Uno, T.,
and Yagiura, M. (2005). Effective local search algo-
rithms for routing and scheduling problems with gen-
eral time-window constraints. Transportation science,
39(2):206–232.
J
¨
unger, M., Reinelt, G., and Rinaldi, G. (1995). Chapter 4
the traveling salesman problem. In Network Models,
volume 7 of Handbooks in Operations Research and
Management Science, pages 225–330. Elsevier.
Katayama, N., Chen, M., and Kubo, M. (2009). A capacity
scaling heuristic for the multicommodity capacitated
network design problem. Journal of computational
and applied mathematics, 232(1):90–101.
Kirkpatrick, S., Gelatt Jr, C. D., and Vecchi, M. P.
(1983). Optimization by simulated annealing. science,
220(4598):671–680.
Lattner, C. and Adve, V. (2002). Automatic pool alloca-
tion for disjoint data structures. SIGPLAN Not., 38(2
supplement):13–24.
Macik, B. M. (2016). Case management task assignment
using optaplanner. Unpublished doctoral dissertation.
Master’s thesis], Masaryk University Faculty of Infor-
matics.
Nguyen, M. A., Dang, G. T.-H., H
`
a, M. H., and Pham, M.-T.
(2022). The min-cost parallel drone scheduling vehi-
cle routing problem. European Journal of Operational
Research, 299(3):910–930.
Quintanilla, S., Ballest
´
ın, F., and P
´
erez,
´
A. (2020). Math-
ematical models to improve the current practice in a
home healthcare unit. Or Spectrum, 42:43–74.
Rashidnejad, M., Ebrahimnejad, S., and Safari, J. (2018).
A bi-objective model of preventive maintenance plan-
ning in distributed systems considering vehicle rout-
ing problem. Computers & Industrial Engineering,
120:360–381.
Rest, K.-D. and Hirsch, P. (2016). Daily scheduling of
home health care services using time-dependent pub-
lic transport. Flexible services and manufacturing
journal, 28:495–525.
Rios de Souza, V. and Martins, C. B. (2020). Uma an
´
alise
do framework optaplanner aplicado ao problema de
empacotamento unidimensional. Revista de Sistemas
e Computac¸
˜
ao-RSC, 9(2).
Semeria, C. (2001). Supporting differentiated service
classes: queue scheduling disciplines. Juniper net-
works, 27:11–14.
Smirnov, A. and Shilov, N. (2010). Ai-based approaches to
solving a dynamic logistics problem. KI-K
¨
unstliche
Intelligenz, 24:143–147.
Van Laarhoven, P. J. M. and Aarts, E. H. L. (1987). Sim-
ulated annealing, pages 7–15. Springer Netherlands,
Dordrecht.
Yalc¸ında
˘
g, S., Matta, A., S¸ahin, E., and Shanthikumar, J. G.
(2016). The patient assignment problem in home
health care: using a data-driven method to estimate
the travel times of care givers. Flexible Services and
Manufacturing Journal, 28:304–335.
Zhang, L., Fontanili, F., Lamine, E., Bortolaso, C., Derras,
M., and Pingaud, H. (2021). Stakeholders’ tolerance-
based linear model for home health care coordina-
tion. IFAC-PapersOnLine, 54(1):269–275. 17th IFAC
Symposium on Information Control Problems in Man-
ufacturing INCOM 2021.
Zhang, L., Pingaud, H., Fontanili, F., Lamine, E., Martinez,
C., Bortolaso, C., and Derras, M. (2023). Balancing
the satisfaction of stakeholders in home health care
coordination: a novel optaplanner csp model. Health
Systems, 12(4):408–428.
ICORES 2025 - 14th International Conference on Operations Research and Enterprise Systems
56
