
An A-Star Algorithm for Argumentative Rule Extraction
Beno
ˆ
ıt Alcaraz
1 a
, Adam Kaliski
1 b
and Christopher Leturc
2 c
1
University of Luxembourg, Luxembourg
2
Universit
´
e C
ˆ
ote d’Azur, France
fi
Keywords:
Rule Induction, Formal Argumentation, Explainability.
Abstract:
In this paper, we present an approach for inferring logical rules in the form of formal argumentation frame-
works using the A
∗
algorithm. We show that contextual argumentation frameworks — in which arguments are
activated and deactivated based on the values of the boolean variables that the arguments represent — allow for
a concise, graphical, and hence explainable representation of logical rules. We define the proposed approach
as a tool to understand the behaviour of already deployed black-box agents. Additionally, we show several
applications where having an argumentation framework representing an agent decision’s model is required or
could be beneficial. We then apply our algorithm to several datasets in order to evaluate its performances. The
algorithm reaches high accuracy scores on discrete datasets, indicating that our approach could be a promising
avenue for alternative data-driven AI learning techniques, especially in the context of explainable AI.
1 INTRODUCTION
Machine Learning (ML) approaches have been
widely used in many applications, such as au-
tonomous vehicles and medical analysis. These ap-
plications, as they may injure humans or cause se-
vere damages, are subject to regulations, demand
that the decisions made by ML models and other
algorithms must be explainable to aid human un-
derstanding and validation (Goodman and Flaxman,
2017). Some methods are considered as more in-
terpretable, such as rule-based learning or decision
trees (Catlett, 1991). However, they usually imply
a trade-off between explainability and performance
(i.e., accuracy or time) compared to machine learning
methods such as deep learning or deep reinforcement
learning. Thus, in some scenarios, it is preferable to
continue using machine learning approaches and to
try to explain their behaviour, following the distill-
and-compare paradigm (Tan et al., 2018).
Additionally, while the form IF premises THEN
conclusion can be used in order to make these expla-
nations human-readable, they often fail to convey the
notion of causality (Lewis, 2013). Consider the sce-
nario: ‘If it is not raining or I have an umbrella, then
I won’t get wet.’ When expressed in propositional
a
https://orcid.org/0000-0002-7507-5328
b
https://orcid.org/0000-0003-2756-719X
c
https://orcid.org/0000-0003-0821-6095
logic or any other logic made of classical boolean
connectors, it fails to convey the crucial point that the
presence of an umbrella becomes irrelevant when it is
not raining. Such loss of contextual information can
lead to misinterpretation and misunderstanding of the
rule’s logic. This is practically problematic, for ex-
ample for ethics and compliance reasons. Hence, we
claim that propositional logic might not be an ideal
way of presenting an explanation in an intelligible
way.
Formal argumentation — a collection of ap-
proaches to automated reasoning, in which logical
statements are considered arguments and their rela-
tions are graphically modelled — is widely consid-
ered as being a facilitator of the explainability of
logic-based reasoning (Fan and Toni, 2014; Rizzo and
Longo, 2018). Argumentation can better express re-
lations between attributes instead of only showing the
final reasons of a decision. Such capability could
enhance the trust users have in a system. Also, be-
cause argumentation graphs are relatively easily un-
derstandable and manipulable by humans (Rizzo and
Longo, 2018), argumentation-based approaches to
rule learning could allow expert modifications over
the produced result to refine the rules or to learn more
about a decision in an interactive manner.
In this paper, we introduce a rule induction ap-
proach based on formal argumentation and heuristic
search, which we call Argumentative Rule Induction
Alcaraz, B., Kaliski, A. and Leturc, C.
An A-Star Algorithm for Argumentative Rule Extraction.
DOI: 10.5220/0013110400003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 2, pages 91-101
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
91

A-star (ARIA). It aims at representing the decision
model of a learning agent through an argumentation
graph, which can be used as a tool to justify the de-
cision of a black-box model. We chose to use an A
∗
search, as it manages to find a potential solution in a
reasonable amount of time.
Furthermore, we want to outline the relevance
of this work in regard to the newer works in the
field of multi-agent systems combining autonomous
agents and reasoning methods. In particular, we be-
lieve that enabling the possibility of obtaining an ar-
gumentation framework matching an agent’s deci-
sions opens a broad field of possibilities in application
domains such as as symbolic reinforcement learn-
ing, or multi-agent negotiation and decision mak-
ing. Also, as previously mentioned, the use of for-
mal argumentation provides a notion of causality. In
some multi-agent communication protocols, such as
Fatio’s protocol (McBurney and Parsons, 2004)—a
formal dialogue protocol focusing onto argumenta-
tive dialogues—such causality notion is necessary for
agents to identify if they can invoke an argument or
not. If we consider again the example of the umbrella,
one cannot tell to the other agent that one has an um-
brella before he asserted that it was about to rain. If
performed in the opposite order, the interaction may
generate an unnecessary amount of locutions by try-
ing to anticipate arguments which may not be asserted
by any agent.
The remainder of the paper is organised as follow.
First, we briefly review relevant rule induction litera-
ture in Section 2. Subsequently, Section 3 introduces
the basic prerequisite from formal argumentation to
understand the mechanisms inside of our proposed
algorithm. In Section 4, we present how our model
is used to compute a justification which may be in-
ferred from a black-box model. Then, in Section 5,
we test our approach over a selection of benchmark
datasets from the literature, and compare to a well-
known rule induction algorithm, as well as a custom
test case fitting our application context. Those results
are discussed in Section 6. Finally, we conclude in
Section 7, recalling the main elements of our contri-
bution and outlining potential future work.
2 RELATED WORK
In recent years, deep neural networks, have been
shown to be particularly successful at solving clas-
sification problems. However these algorithms suffer
from a lack of explainability (Szegedy et al., 2013).
A solution to make a system understandable
is to apply decision tree classification approaches.
The algorithm C4.5 (Quinlan, 2014), based on
ID3 (Quinlan, 1986), has been developed following
this paradigm. However, it has been shown that those
approaches tend to be outperformed in many domains
by rule induction algorithms (Bagallo and Haussler,
1990; Quinlan, 1987; Weiss and Indurkhya, 1991).
Rule induction algorithms are a category of ap-
proaches that usually tries to generate a set of rules
for each decision or class. Then, if an input trig-
gers one of the rules for a given class, it is consid-
ered as being part of this class. There exist a vari-
ant of C4.5, called C4.5-rules, on which many ap-
proaches were based. For instance, IREP (F
¨
urnkranz
and Widmer, 1994) has been introduced to accommo-
date the issues of C4.5 relative to its computation time
by making the pruning more efficient. However, it
was usually producing more errors than C4.5 on do-
main specific datasets. For this reason, Cohen devel-
oped an improved version called RIPPERk (Cohen,
1995) which is at the same time more efficient, more
accurate, and more resilient to the noise in the data.
An algorithm of rule induction based on a genetic al-
gorithm, SIA (Venturini, 1993), generates a popula-
tion of rules and compares the predictions performed
with it to an actual dataset. The algorithm has to max-
imise the number of correct predictions. The algo-
rithm ESIA (Liu and Kwok, 2000) (Extended SIA)
is an extension of SIA. While the base principle re-
mains similar in both approaches, ESIA contains sev-
eral modifications to the operators of SIA, such as the
specialization operator, and introducing a separate-
and-conquer search method.
In parallel, much work has been done in explain-
ability, especially with the new Deep Reinforcement
Learning (DRL) algorithms presenting high perfor-
mance but poor interpretability (Adadi and Berrada,
2018). In the next years, such capability could be-
come an obligation more than an option with incom-
ing legislation in the right to explanation (Selbst and
Powles, 2018). We divide these works in two cate-
gories. The first one concerns the algorithms which
have an intrinsic intelligibility, meaning that the algo-
rithm itself provides information for its understand-
ing. The second one concerns algorithms produc-
ing post-hoc explanations (Puiutta and Veith, 2020),
meaning that we can apply these algorithms to vari-
ous AI models to extract information.
Verma et al. (Verma et al., 2018) propose an intrin-
sic explainability method by presenting a reinforce-
ment learning agent producing interpretable policy
rules. By representing the states in a high-level man-
ner, it can express the rules determining the action to
perform, i.e., the policy to follow. Even though this
work is competitive with DRL algorithms when work-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
92

ing with symbolic inputs, it cannot handle perceptual
inputs, such as pixels of an image, or stochastic poli-
cies, useful in game environment. Moreover, policies
generated in this work remain hard to grasp especially
for a non-expert user, due to the large amount of nu-
merical values present in the rule which greatly de-
creases intelligibility. Additionally, the replacement
of black-box models by newer intrinsically explain-
able methods might either be something not appli-
cable, or too expensive for a company. This might
limit the spreading of such a method. Last, it is often
the case that those explainable methods show slightly
lower performance than black-box models. Thus, it
forces to a trade-off between performance and ex-
plainability.
On the other hand, post-hoc methods for explain-
ability (Puiutta and Veith, 2020; Hein et al., 2018;
Adadi and Berrada, 2018) aim at generating from re-
inforcement learning policies a set of equations de-
scribing trajectories of the analysed policy. These
outputs are presented with a certain amount of com-
plexity in terms of explainability. Yet, authors admit
that, even if pretty low, complexity equation sets al-
low good performance in addition to showing some
explainability relief when compared to Neural Net-
work approaches, they still under-perform it in terms
of pure performance. Moreover, the equation sys-
tem may start to become hard to understand due to
the abstract nature of some thresholds. Also, be-
cause this algorithm is computing rules of trajectory,
it may struggle in highly discretized environments
such as the ones with categorical inputs. Further-
more, this work and others presented in Puiutta and
Veith (Puiutta and Veith, 2020) such as Liu et al. (Liu
et al., 2018) or Zahavy et al. (Zahavy et al., 2016) are
not agnostic to the learning algorithm for which they
provide explanations and need access to the policy of
the agent. Another post-hoc approach is the counter-
factual explanation which consists in giving bits to the
end-user to help him understand what the machine is
doing by presenting slight input variations to obtain
different outputs (Wachter et al., 2017). The problem
of such a method is that it leaves the responsibility
to the end user to make suppositions on what impacts
the model’s decision and what does not. Addition-
ally, it is not at all a scalable methodology. Tan et
al. (Tan et al., 2018) presented a model distillation.
This method transfers knowledge from a large, com-
plex model (teacher) to a faster, simpler model (stu-
dent). Yet, even if it can successfully extract data from
black-box algorithms, the problem of the explainabil-
ity of the extracted data remains.
Last, the algorithm PSyKE (Sabbatini et al., 2021)
is the closest to our approach in term of application.
In this work, authors use a rule induction generating
some Prolog-like rules based on the classifications of
a given model, such as CART, GridEx, or k-nn. While
it tends to under-performs the initial model, this is
not a major issue as it only aims at providing a jus-
tification for the decisions taken by the classification
model by giving the set of rules leading to this afore-
mentioned decision. As such, they define a value
called black-box fidelity, and which shows how ac-
curately the generated rules mimic the classification
of the black-box model.
3 ABSTRACT ARGUMENTATION
In this section, we provide the necessary formal pre-
liminaries of abstract argumentation, based on Dung’s
seminal paper (Dung, 1995).
Definition 1 (Argumentation framework). An argu-
mentation framework is a tuple F = (Args,R ), where
Args is a set of elements called arguments and R ⊆
Args×Args is a relation over the arguments referred
to as attack.
Given S ⊆ Args, we recall the notions of conflict-
free and acceptability. A conflict-free set is one in
which no argument in the set attacks another. Accept-
ability represents the constraint that an argument is
only acceptable if all its attackers are themselves at-
tacked by an argument in the set.
• S is a conflict-free set of arguments w.r.t. R iff
∄a,b ∈ S s.t. aR b,
• For all a ∈ Args, a is acceptable w.r.t. S iff ∀b ∈
Args, if bR a, then ∃c ∈ S, such that cR b.
We recall the standard definitions for extensions :
• S is an admissible extension iff S is conflict-free
and all arguments a ∈ S are acceptable wrt S.
• S is a complete extension iff S is admissible and
contains all acceptable arguments wrt S.
• S is a grounded extension iff S is a minimal com-
plete extension with respect to strict set inclusion
i.e. ∄S
′
⊆ Args s.t. S
′
⊂ S, and S
′
is a complete
extension.
It is well-known result that for all argumenta-
tion frameworks F = (Args,R ), there exists a unique
grounded extension (Baumann, 2017). Thus, it is of
interest to apply the grounded semantics. Further-
more, the grounded semantics is also interesting for
its computational aspect since it can be computed
in time O(|Args| + |R |) by efficient algorithms like
those proposed by Nofal et al. (Nofal et al., 2021).
Thus, in this approach we will consider only grounded
An A-Star Algorithm for Argumentative Rule Extraction
93

semantics although the theoretical framework can ap-
ply other extension semantics.
4 MODEL
This section describes how each component of our
model works. First, we present how our model would
bring intelligibility to a black-box algorithm when de-
ployed. Second, we detail how it generates an ex-
plainable model with the help of some data.
4.1 Computing a Justification
As said previously, the goal of our approach is to jus-
tify the decision of a black-box algorithm (which will
be referred in the rest of the section as a BB or agent).
More specifically, we want to observe one action and
why it was, or was not, chosen. For instance, why the
autonomous car applied the brakes or the accelerator.
To do so, we introduce two core elements, as well
as an example to better understand how our approach
should work.
4.1.1 Universal Graph
In order to be used, our approach requires a dataset
denoting the behaviour of an agent (or any BB al-
gorithm) in various situations. Such a dataset should
provide as input the perceptions of the BB algorithm
(which can be raw or pre-processed information), and
as a label, if the tracked action has been performed or
not. Once this dataset is available, the search process,
detailed later in Section 4.3, can start.
Once finished, this search process will return a
graph, inspired by the structure of an argumentation
framework, representing the overall relationship be-
tween the perceptions, and how they can influence the
final decision. We call this graph the Universal Graph,
as it tends to represent the overall behaviour of the BB
algorithm in any situation. In our implementation,
the nodes of the graph are having as a value a tuple
attribute-value from the dataset inputs. However, it is
possible to use expert knowledge to provide more so-
phisticated nodes. For example, instead of having a
node with a very arbitrary value “size=3.5cm”, an ex-
pert could design values such as “size=small”, which
would include anything with a size less than 5 cm.
On the other hand, there are two additional nodes.
The first one is called the target, and is written as τ.
This argument represents the decision performed by
the agent. As will be detailed in the next section,
it will denote the fact that the agent performed the
tracked action if it is part of the grounded extension,
or otherwise that the agent did not. The second ad-
ditional node is written as λ. While this argument is
not bound to any couple attribute-value, it denotes a
support relation to the target from the other nodes, as
explained by Boella et al. (Boella et al., 2009). As
such, this node can only attack the target. Any other
node attacking it will then be considered as support-
ing the target due to the defense relationship created
between them.
4.1.2 Contextual Graph
Once in possession of the Universal Graph, one can
then compute what is called the Contextual Graph.
This graph is a projection of the Universal Graph
given a set of facts i.e., a set of perceptions from the
agent in a specific situation
1
. As a consequence, it fil-
ters out all the nodes whose value is not part of the
facts, except for τ and λ which are always in the Con-
textual Graph. The resulting graph is then a proper
argumentation framework.
It is now possible to compute an extension based
on this Contextual Graph. While in theory any ex-
tension would be usable with some adjustments, we
chose to use the grounded extensions as it features
two advantages over the others. First, it is unique,
and as such less ambiguous that a set of extensions
when it comes to providing an explanation to the end
user. Second, it computes in polynomial time
2
which
is an interesting feature to shorten the search phase.
Then, if the target τ is part of the extension, and if
this matches the decision that the BB made (i.e., do-
ing the tracked action or not), it can serve to justify
this decision by potentially providing an explanation
based on this graph. This includes the cases where
the BB took the wrong decisions, as long as the BB
output matches the graph output. There exist several
ways to provide an explanation from an argumenta-
tion framework (Liao et al., 2021; Fan and Toni, 2014;
Doutre et al., 2023), which may, for instance, consist
of extracting the smallest set of arguments such that
the target is defended or the smallest chain such that
it is defeated. As this is not the focus of this paper, we
leave this choice to the designer.
4.1.3 Example
In order to make it clearer, we provide the following
running example inspired from the Car dataset (Bo-
hanec, 1997). Fig. 1 represents a graph which has
1
This may also correspond to the input of one entry of
the BB’s behavioural dataset.
2
While the preferred extension also share a polynomial
complexity, it still requires a greater time to be computed.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
94
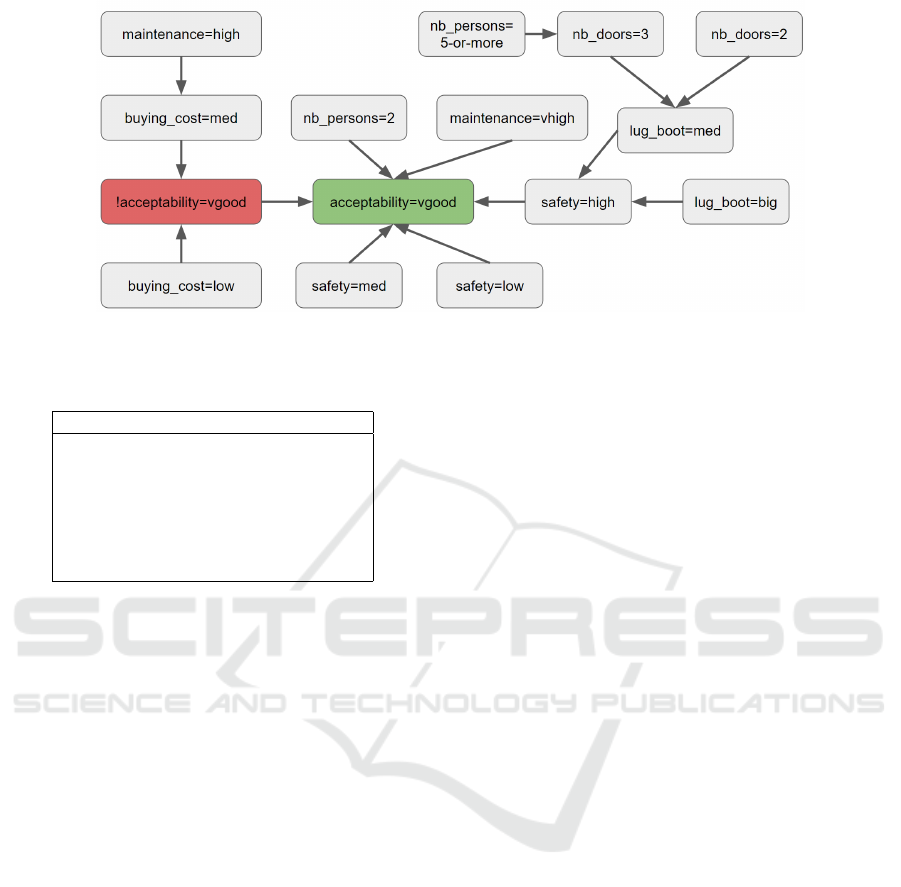
Figure 1: Universal graph for the Car dataset. The τ argument is in green. The λ argument is in red.
Table 1: Summary of the facts, i.e., the values for the differ-
ent attributes, for the presented example.
Attribute Value
Buying cost = Medium
Maintenance cost = Low
Number of doors = 3
Number of seats = 5-or-more
Luggage boot = Medium
Safety = High
Acceptability (Label) = Very-good
been inferred with our approach from the aforemen-
tioned dataset. The task is to evaluate a car buying
acceptability based on several attributes and their val-
ues, such has the number of seats, the buying cost, the
maintenance cost, and so on. There are four classes,
namely “Unacceptable”, “Acceptable”, “Good”, and
“Very good”. In this specific case, the target argument
is associated to the class “Very good”, i.e., “The car
has a very good buying acceptability”. As such, the
target not being in the extension can classify as “Un-
acceptable”, “Acceptable”, or “Good”. Fig. 1 shows
the Universal Graph and then gives an overview of
how each argument (i.e., couple attribute-value) can
influence the final decision. However, it does not jus-
tify any specific decision yet.
Fig. 2 shows the Contextual Graph derived from
the Universal Graph shown in Fig. 1. The later corre-
sponds to the set of facts presented in Table 1, i.e., the
values assigned to the different attributes. In this ex-
ample, the Car has been classified as “Very good” in
terms of buying acceptability. From the Contextual
Graph, we can see the elements which lead to this
decision. For instance, because high safety was not
sufficient, it was also required that it has a medium
luggage boot. On the other hand, if it did not have at
least 5 seats, the car would not have been classified as
“Very good” since the number of doors were 3. On
the other hand, the medium buying cost supports the
classification by attacking the λ argument.
4.2 n-Arguments
Let be the set of arguments corresponding to the pres-
ence of a couple attribute-value in the facts be called
“Positive arguments” (or p-arguments). It is then pos-
sible to respectively define “Negative arguments” (or
n-arguments). In opposition to p-arguments, which
appear in the contextual graph only if the facts match
their condition, n-arguments are present in the con-
textual graph if their condition is not present in the
facts. They denote a missing fact. While using only
the set of p-arguments makes the representation of
some logic formula impossible, the addition of the
n-arguments allows to represent a broader range of
formulae. However, adding these extra arguments in-
creases the number of neighbours for each node, and
as such, increases the total computation time.
More formally, let P be a non empty set of propo-
sitional atoms. In this application, each propositional
atom represents a possible valuation for an attribute,
e.g. q := ”Buying cost = Medium” ∈ P . We de-
fine the language L
P
as the set of well-formed formu-
las (wff), with the following BNF grammar, for any
p ∈ P :
φ ::= ⊥ | p | ¬φ | φ ∨ ψ
As usual, we use the following notation shortcuts:
• ⊤ := ¬⊥,
• φ ∧ ψ := ¬(¬φ ∨ ¬ψ),
• φ ⇒ ψ := ¬φ ∨ ψ
An interpretation model I over a valuation V : P →
{⊤,⊥} is given by the function I : L
P
→ {⊥, ⊤} s.t.
∀φ ∈ L
P
,I |= φ iff I(φ) = ⊤ where :
1. ∀p ∈ P ,I |= p iff V (p) = ⊤
2. ∀φ,ψ ∈ L
P
,I |= φ ∨ ψ iff I |= φ or I |= ψ
3. ∀φ ∈ L
P
,I |= ¬φ iff I ̸|= φ
An A-Star Algorithm for Argumentative Rule Extraction
95
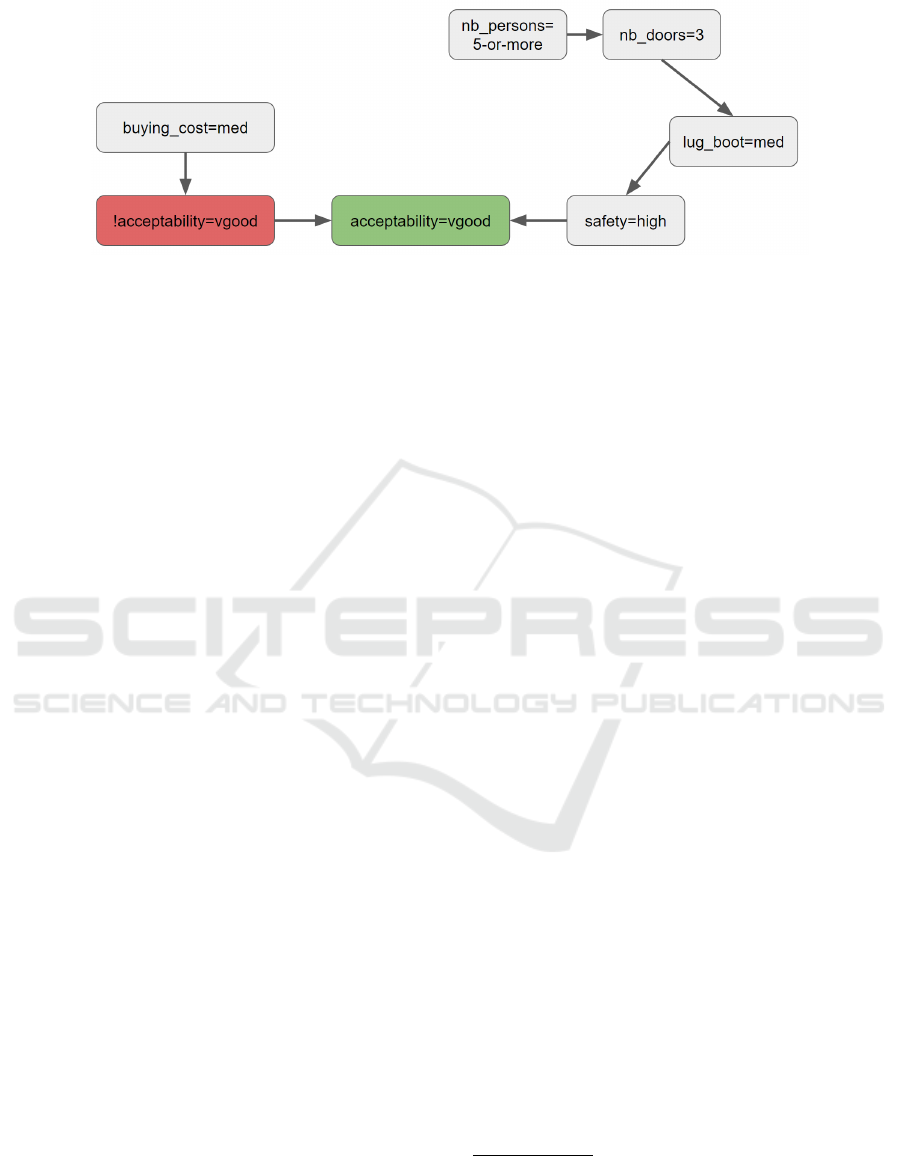
Figure 2: Contextual graph for the Car dataset and a specific input. The target argument is in green. The λ argument is in red.
Additionally, we will denote the set of symbols
¯
P := { ¯p : p ∈ P } which corresponds to the negation
of propositional atoms. Henceforth, we call a class of
interpretation models based on the set of valuations
Ω ⊆ {⊤, ⊥}
P
a propositional dataset. We note that
∀φ ∈ L
P
,Ω |= φ iff for all V ∈ Ω, the interpretation
model I
V
over V is s.t. I
V
|= φ.
Example 1. The following example aims at show-
ing a situation that cannot be represented by solely
using p-arguments, and would require the addition
of the n-arguments. We represent an argument as
a couple, composed by a name A, and a condition,
represented as a propositional formula of L
P
. Let
Args = {(τ, ⊤),(λ,⊤),(A, a),(B,b)} with a,b ∈ P ,
be the set of arguments and F ∈ Ω be the set of facts.
We represent a situation where τ should be part of the
grounded extension, denoted In(τ), under the follow-
ing condition:
In(τ) → ((a ∈ F ∧ b /∈ F ) ∨ (a /∈ F ∧ b ∈ F ))
Without duplicating the arguments, it is
not possible to represent such condition.
Now, let us add to our current set of argu-
ments the n-arguments ¯a,
¯
b ∈
¯
P , such that:
Args = {(τ,⊤),(λ, ⊤),(A,a),(B,b), (C, ¯a),(D,
¯
b)}.
It is now possible to construct an argumen-
tation framework with the set of arguments
A = {τ,λ,A, B,C} and the attack relation
R = {(λ,τ),(A, λ),(B, A),(C,B), (C,λ,), (D,C)}.
This argumentation framework can correctly rep-
resent the fact that τ should be part of the grounded
extension if a is in the facts but not b, or if b is in the
facts but not a.
4.3 Search Method
As previously said in the paper, our algorithm is per-
forming an A
∗
search to induce the final argumenta-
tion framework. This algorithm is described in Al-
gorithm 1. The main principle is to explore a search
space by walking from neighbour to neighbour, fol-
lowing a heuristic to maximise prediction accuracy.
In our implementation, given a set of attributes Att
and a set of available values Val
i
for an attribute i, we
define the set of all the arguments which can be rep-
resented by the dataset attributes and values as:
A := {τ,λ}∪{q : i ∈ Att, j ∈ Val
i
,q := “Att
i
= Val
i j
”}
In order to avoid generating too many meaning-
less arguments in the event of continuous numerical
attributes, we segment them into intervals. As such,
an attribute φ having a value ranging from 0 to 10
would generate the arguments φ = 0 − 2, φ = 2.1 − 4,
..., with an interval size depending on the number of
segments we wish to generate. While this is conve-
nient to quickly parse a dataset, we recommend to use
expert knowledge to design arguments based on those
numerical values, such as φ = “Above the average”.
We can then encode our attack relation as a matrix
of size R = |A| ×|A|, where the element R
i j
is equal
to 1 if there is an attack from A
i
to A
j
, 0 if not, and
−1 if the attack is disallowed (i.e., would create a re-
flexive attack, a symmetrical attack
3
, or the attacker
would be the τ or λ argument). Moreover, we forbid
attacks between two arguments instantiated from the
same attribute, as they would not be able to be part
of the set of facts at the same time. However, if the
dataset used is multi-valued, this feature can be re-
moved. As such, we define two nodes (i.e., solutions)
as neighbours if they differ by one value in this ma-
trix, or in other words, by whether their associated
graphs differ by one attack.
Additionally, we define a heuristic h(x) given a so-
lution x which is equal to the sum of the incorrect pre-
dictions over the training data, plus a small fraction
corresponding to the number of attacks in the graph,
noted x
R
, divided by |A|
2
, where A is the set of all the
3
As the choice of the grounded extension—to guaran-
tee the uniqueness of our explanation—is an undesirable se-
mantics for graphs containing cycles, we try to avoid them.
However, it is possible to allow them if more sophisticated
extensions are used.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
96

Requires: MaxIterations
iteration ← 0
queue ← {}
bestNode ← getStartingNode()
node ← getStartingNode()
queue.add(node)
while ¬ Empty(queue) and
GetAcc(node) < 100 and
iteration < MaxIterations do
iteration ← iteration +1
neighboursList ← getNeighbours(node)
for neighbour in neighboursList do
if ¬ Visited(neighbour) then
queue.add(neighbour)
Visited(neighbour) ← ⊤
end if
end for
node ← getNextPrioritaryNode(queue)
queue.remove(node)
if GetAcc(node) > GetAcc(bestNode) then
bestNode ← node
end if
end while
return bestNode
Algorithm 1: A* search algorithm.
arguments present in the dataset, or more formally:
h(x) =
∑
i∈data
(
1, if pred
i
̸= label
i
0, otherwise
+
|x
R
|
|A|
2
Solutions should minimise the value of this func-
tion. This way, a solution getting fewer errors than
another one is systematically preferred, but in case of
an equal error count, the one presenting the fewest at-
tacks is preferred.
In order to build the graph, we follow a bottom-up
tactic. The starting node has a graph composed of a
single argument which is the target argument. An at-
tack can only be added if there exists a path from the
attacking argument to the target, using this new at-
tack. This way, when progressing in the search, argu-
ments and attacks are progressively added and remain
connected to the target. In order to reduce as much as
possible the exploration space, we ensure that a solu-
tion is not visited twice by computing an associated
hash and saving it. We then compare the candidate
neighbours’ hash to the ones already saved and add
them to the queue only if they have not already been
visited. Furthermore, if the addition of an attack had
no effect on the correctness of the predictions com-
pared to the solution without this attack, we simply
stop exploring this branch. This greatly reduces the
time required to explore the solution space.
5 EVALUATION
This section is divided into two parts. The first one fo-
cuses on the learning capabilities of the algorithm and
presents the obtained accuracy given various datasets
from the literature. The second is a test case where we
apply our approach to a reinforcement learning agent
for playing Blackjack, focusing on the explainability
side.
5.1 Quantitative Evaluation
Testing this algorithm amounts to running it over a
selection of benchmark datasets. Congressional Vot-
ing (mis, 1987) contains the voting patterns of several
politicians. The task is to guess if they belong to the
Republican party or Democrat party based on their
votes. In this dataset, all attributes are categorical
and binary. The Breast Cancer Wisconsin (Wolberg
et al., 1995) dataset presents diagnostic data based on
several attributes, such as the tumour size or position,
having their value ranging from 1 to 10. The task is
then to classify a tumour as benign of malignant. This
dataset is interesting as the numerical values are not
already segmented. Lastly, the Heart Disease (Janosi
et al., 1988) analysis from Cleveland contains medical
data with many numerical and categorical attributes
such as blood pressure or the patient’s sex. The task
is to classify whether the patient has heart disease or
not. This dataset has been proven to be difficult for
learning algorithms. We should also note that each of
the aforementioned datasets presents a binary classi-
fication task. The algorithm used as the benchmark
for this approach was the C4.5 decision tree algo-
rithm (Quinlan, 2014).
We decided to evaluate two versions of our ap-
proach, namely ARIA and n-ARIA
4
. The tests took
the form of ten runs of one hundred iterations each
over the datasets, which were split such that 70%
comprised the training data, and the remaining 30%
comprised the test data. In the evaluation table, the
mean of the final convergence values across the ten
runs is reported, along with the standard deviation.
The code was written in C++, and executed on a ma-
chine with an 11th Gen Intel Core i9-11950H proces-
sor running at a 2.60GHz clock speed, with 8 physical
cores and 16 logical cores, and with 32GB of mem-
ory.
The results of these tests, measured against the
benchmark C4.5, are summarised in Table 2.
4
No value for the Voting dataset as all the arguments are
already expressed with their negation in the base dataset.
5
Breast Cancer Wisconsin.
6
Heart Disease Cleveland.
An A-Star Algorithm for Argumentative Rule Extraction
97
Table 2: Accuracy of the baseline (C4.5) and our approach
(ARIA) on several datasets. Last column shows the accu-
racy with the use of the n-arguments.
Dataset C4.5 ARIA n-ARIA
Voting 94.3 ± 2.4 95.7 ± 1.9 -
BCW
5
93.5 ± 1.5 94.4 ± 1.2 95.6 ± 1.4
HDC
6
60.9 ± 3.7 79.3 ± 3.0 78.7 ± 2.4
As we can see, our approach proves to be more
capable than C4.5 at learning over the various tested
dataset, especially onto the Heart Disease dataset
where the difference is statistically significant. On the
other hand, the n-ARIA variant does not show a clear
improvement. We believe that datasets usually feature
enough attributes and values to avoid requiring extra
expressiveness capabilities.
It is also relevant to note that our approach learned
over the data in a reasonable time (i.e., it could realis-
tically be used) as it does not exceed three minutes
for each dataset to perform one hundred iterations.
We should also note that the final solution is usually
found before reaching the iteration limit.
Additionally, an important result to mention is the
growth of the graph size, and in particular the attack
relation. This value can greatly differ between the
dataset and the runs. In our tests, it approximately av-
erages to 10 for the Voting dataset, 10 for the Breast
Cancer Wisconsin dataset, and 25 for the Heart Dis-
ease dataset. Also, we should note that when comput-
ing a contextual graph in order to provide an expla-
nation, unless the dataset is multi-valued, the number
of nodes (i.e., arguments) present in the graph cannot
exceed the number of attributes of the dataset (plus τ
and λ).
Similarly, the above tests were replicated for the
n-ARIA algorithm, an extension of ARIA with the in-
clusion of n-arguments as described in Section 4.2.
The datasets chosen to test n-ARIA were Breast Can-
cer Wisconsin (Wolberg et al., 1995), and Cleveland
Heart Disease (Janosi et al., 1988). The exclusion
of the Congressional Voting dataset for these tests
was due to the arguments already being expressed
in a true/false manner, as opposed to the two chosen
benchmarks.
Compared to C4.5, n-ARIA performs slightly bet-
ter on the Breast Cancer Wisconsin dataset, and sig-
nificantly better on the Heart Disease dataset. How-
ever, when compared to ARIA, n-ARIA’s perfor-
mance is practically indistinguishable. On the con-
trary, n-ARIA shows as expected a longer computa-
tion time, usually more than thrice the time required
by ARIA.
5.2 Test Case: RL-Blackjack
In order to qualitatively analyse our approach, we
trained a Reinforcement Learning (RL) agent to play
Blackjack. Then, a dataset was generated such that
each entry included the state of play, and the action
chosen by the agent, as suggested in Section 4.
5.2.1 Reinforcement Learning Environment
The rules of Blackjack are common knowledge, and
can be summarised as follow: the goal is to beat the
dealer’s hand without exceeding a total card value of
21. Number cards retain their face value, face cards
(Jack, Queen, King) are worth 10, and Aces can be
worth 1 or 11, depending on the player’s preference.
Players are dealt two cards initially and can request
additional cards (i.e., HIT) to improve their hand.
They can HIT as many times as they wish, and then
STAND, which ends their turn. Additionally, they can
DOUBLE, which is similar to HIT, but also doubles
their initial bet (so in our environment, double the po-
tential reward outcome). Using DOUBLE also ends
the turn of the player. After all players have finished
their turns, the dealer reveals their hand and must HIT
until they reach a total of 17 or higher. If a player’s
hand exceeds 21, they bust and lose the round. If
neither player nor dealer busts, the hand with a to-
tal closer to 21 wins. A natural blackjack (an Ace and
a 10-value card) typically pays out 3:2.
In our environment, the reward is +1 if the agent
wins, −1 if it loses, and respectively +2 and −2 if it
doubled. Draws are worth 0, and having a blackjack
multiply the reward by 1.5 according to the rules. As
this is not the focus of this paper, we do not recall the
equations related to reinforcement learning, such as
Bellman’s equation, but we encourage the reader to
read the work from Wiering and Van Otterlo (Wier-
ing and Van Otterlo, 2012) to better understand the
functionality of this architecture.
After the learning phase, we generate a 600 lines
dataset featuring some random state as input, and the
action the agent would perform following its optimal
policy as the label. We then ran ARIA with the fol-
lowing arguments (booleans having the values T or F
for True or False):
Player-Sum (PS). The sum of the player’s cards.
Ranges from 4 to 21.
Dealer-Sum (DS). The sum of the dealer’s cards.
Ranges from 4 to 21.
Player-Less-Than-Dealer (P<D). Boolean stat-
ing that the player’s total is less than the dealer’s
total.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
98
Player-Above-11 (P11). Boolean stating the
player’s total is above 11.
Dealer-Above-11 (D11). Boolean stating the
dealer’s total is above 11.
Player-Has-Ace (PA). Boolean stating the player
has an Ace.
Dealer-Has-Ace (DA). Boolean stating the dealer
has an Ace.
Player-STAND (STAND). The target (τ). Corre-
sponds to the player deciding to STAND (rather
than HIT or DOUBLE).
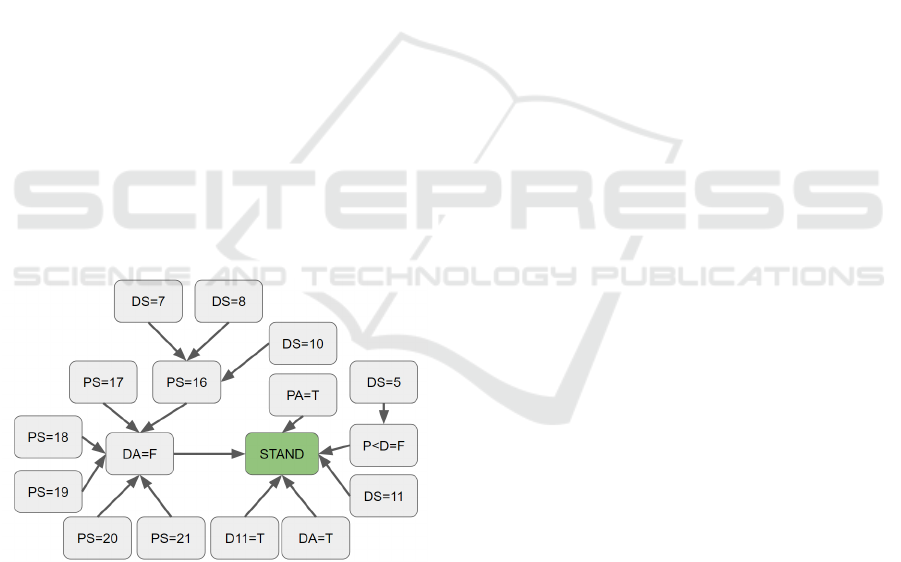
5.2.2 Extracted Graph
After running ARIA over the data, we obtained the
graph shown in Fig. 3. Examining the graph, it is rela-
tively easy to interpret it—assuming sufficient knowl-
edge of the game—and figure out what the strategy
of the agent is. For the cases were it is above 17 (in-
cluded) it prefers to STAND to avoid being busted.
However, if it has 16 and that the dealer has 7, 8, or
10 (note that here, the value 9 does not appear, maybe
because this case was not covered by the dataset), it
prefers to HIT, as the chances that the dealer has a 10-
value card are high, and this would result in a bigger
value than the agent. Also, if the player has an ace, he
can safely HIT as it cannot exceed the limit of 21. For
the reason the agent systematically chooses to HIT if
there is an ace.
Figure 3: Universal Graph obtained after running ARIA on
the RL-Blackjack dataset.
While we can see some other patterns appear in
the graph, we want to outline the simplicity of ex-
tracting them by examining the visualisation (at least
for someone familiar with the domain). While some
domains may require an expert to look at the graph in
order to understand the agent’s decision model (e.g.,
medicine), some other domains are easier to analyse
by laypeople (e.g., autonomous driving).
6 DISCUSSIONS
As explained during the introduction, the aim of our
approach is not to replace black-box algorithms such
as neural networks, but rather to provide insight on
what factors determine a certain decision.
This can serve either as a post-hoc explanation of
an incident involving the black-box model, or as a
way to verify before the deployment that the agent
will behave correctly in specific situations. While this
latter can be done by looking at the generated graph,
it is recommended to compute the action of the black-
box in parallel and compare it to the graph prediction,
as in the event they differ, the explanation provided
by the graph might not be accurate.
In Section 5, we compared our approach to a
benchmark on several tabular datasets presenting a bi-
nary classification task. We focus on binary classifica-
tion since the aim was not to explain the entire agent’s
decision model, but rather solely to justify the choice
of a particular action. For this reason, we should also
note that even though the datasets we chose are noisy
and currently no state of the art approach is able to
achieve a perfect score, improving noise resiliency
is not very relevant for our approach as in our case,
those data would be obtained from the black-box it-
self, which usually would not have any stochastic be-
haviour in its decisions.
Furthermore, we evaluated the n-ARIA variant
which should provide more possibilities to express
the underlying patterns of the dataset. However, as
shown by our experiments, it does not clearly enhance
the results obtained by ARIA, while at the same time
greatly increasing computing time. As such, we do
not recommend its usage.
While we acknowledge the fact that another rule
induction approach could be used to achieve some-
thing similar to our application case, we want to out-
line an advantage of using ARIA which resides in its
readability. Indeed, among the various rule induction
approaches mentioned in Section 2, most of them end
up with a large set of rules (usually more than a hun-
dred on datasets such as Heart Disease Cleveland).
We believe that such a number is beyond the capacity
for a layperson to detect patterns and recognise key
elements leading to the decision.
Last, as mentioned in introduction and even if this
was not our original focus, we believe that such an
argumentation rule induction model could be particu-
larly relevant for several application domains related
to multi-agent systems. First, some approaches from
the field of Machine Ethics are relevant. In the Jiminy
architecture from Liao et al. (Liao et al., 2019; Liao
et al., 2023), agents are modelled by an argumenta-
An A-Star Algorithm for Argumentative Rule Extraction
99

tion framework which is then used to solve norma-
tive conflicts among them. While those graphs could
in principle be handcrafted, we believe that using
ARIA is more scalable and less prone to human bias.
In some other approaches, such as Alcaraz et al. (Al-
caraz et al., 2023), argumentation graphs are used to
model judging agents building a reward for some rein-
forcement learning agent. Using our algorithm could
enable the possibility of automatically building those
judging agents over a population of agents already in-
teracting in a normative environment. Lastly, our ap-
proach can be used to allow some agents to reason and
negotiate about norms, as it creates a way to organise
the arguments and attacks, as well as computing them,
as proposed by Yu et al. (Yu et al., 2021), which intro-
duces the notion of individual and collective defence.
7 CONCLUSION AND FUTURE
WORKS
In this paper, we presented ARIA, a novel approach to
rule induction which combines heuristic search with
formal argumentation to represent the decision model
of a black-box algorithm. We first outlined the ad-
vantages of using formal argumentation over classical
propositional logic, as well as the potential applica-
tions. Then, we have shown that our approach obtains
satisfactory results over selected tabular datasets con-
taining both categorical and numerical information,
and can be ran in an acceptable amount of real time.
Finally, we presented a short use-case showcasing our
approach when used on an RL agent.
Perspectives and Research Directions
To conclude this paper, we would like to share poten-
tial directions for future work.
A natural future work is to try our approach over
some real scenarios, as for now we only try it over
benchmark datasets which are not reflective of the
way an agent would make decisions.
Also, we currently stick to the argumentation as
defined by Dung. Nevertheless, we believe that using
select modern frameworks, such as bipolar argumen-
tation, could greatly improve the expressivity of the
generated graphs. As such, we recommend exploring
various possibilities in the field of formal argumenta-
tion.
Additionally, we acknowledge that the current
way we generate the arguments could be too basic,
and that having a human expertly designing them
is not easily scalable. For this reason, we would
like to seize the opportunity of the recent advances
in the field of ChatBots and Large Language Mod-
els (LLMs), and use their generative capabilities to
automatically produce more sophisticated arguments.
While we do not provide any implementation yet,
we believe that a good starting point would be to
provide an Application Programming Interface (API)
to the LLM so it could design more complex argu-
ments based on pre-processed elements. This would
especially improve the handling of the numerical at-
tributes.
Last, we believe that our architecture could be im-
proved in order to reach higher accuracy. In partic-
ular, we would like to treat the multi-class tasks by
having all the actions appearing in the same graph.
This would allow using the information that the agent
will prefer an action to another in certain situations,
resulting in more modelling possibilities. Further-
more, we would like to implement a method for a
better segmentation of the continuous numerical at-
tributes, both reducing the number of generated argu-
ments, and making them more meaningful.
ACKNOWLEDGMENTS
This research is supported by the Lux-
embourg National Research Fund (FNR):
IPBG2020/IS/14839977/C21.
REFERENCES
(1987). Congressional Voting Records. UCI
Machine Learning Repository. DOI:
https://doi.org/10.24432/C5C01P.
Adadi, A. and Berrada, M. (2018). Peeking inside the
black-box: a survey on explainable artificial intelli-
gence (xai). IEEE access, 6:52138–52160.
Alcaraz, B., Boissier, O., Chaput, R., and Leturc, C. (2023).
Ajar: An argumentation-based judging agents frame-
work for ethical reinforcement learning. In AA-
MAS’23: International Conference on Autonomous
Agents and Multiagent Systems.
Bagallo, G. and Haussler, D. (1990). Boolean feature dis-
covery in empirical learning. Machine learning, 5:71–
99.
Baumann, R. (2017). On the nature of argumentation se-
mantics: Existence and uniqueness, expressibility, and
replaceability. Journal of Applied Logics, 4(8):2779–
2886.
Boella, G., Gabbay, D. M., van der Torre, L., and Villata, S.
(2009). Meta-argumentation modelling i: Methodol-
ogy and techniques. Studia Logica, 93:297–355.
Bohanec, M. (1997). Car Evaluation. UCI
Machine Learning Repository. DOI:
https://doi.org/10.24432/C5JP48.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
100

Catlett, J. (1991). Mega induction: A test flight. In Machine
Learning Proceedings 1991, pages 596–599. Elsevier.
Cohen, W. W. (1995). Fast effective rule induction. In Ma-
chine learning proceedings 1995, pages 115–123. El-
sevier.
Doutre, S., Duchatelle, T., and Lagasquie-Schiex, M.-C.
(2023). Visual explanations for defence in abstract
argumentation. In International Conference on Au-
tonomous Agents and Multiagent Systems (AAMAS),
pages 2346–2348. ACM.
Dung, P. M. (1995). On the acceptability of arguments and
its fundamental role in nonmonotonic reasoning, logic
programming and n-person games. Artificial intelli-
gence, 77(2):321–357.
Fan, X. and Toni, F. (2014). On computing explanations in
abstract argumentation. In ECAI 2014, pages 1005–
1006. IOS Press.
F
¨
urnkranz, J. and Widmer, G. (1994). Incremental reduced
error pruning. In Machine learning proceedings 1994,
pages 70–77. Elsevier.
Goodman, B. and Flaxman, S. (2017). European union reg-
ulations on algorithmic decision-making and a “right
to explanation”. AI magazine, 38(3):50–57.
Hein, D., Udluft, S., and Runkler, T. A. (2018). Inter-
pretable policies for reinforcement learning by genetic
programming. Engineering Applications of Artificial
Intelligence, 76:158–169.
Janosi, A., Steinbrunn, W., Pfisterer, M., and Detrano, R.
(1988). Heart Disease. UCI Machine Learning Repos-
itory. DOI: https://doi.org/10.24432/C52P4X.
Lewis, D. (2013). Counterfactuals. John Wiley & Sons.
Liao, B., Anderson, M., and Anderson, S. L. (2021). Rep-
resentation, justification, and explanation in a value-
driven agent: an argumentation-based approach. AI
and Ethics, 1(1):5–19.
Liao, B., Pardo, P., Slavkovik, M., and van der Torre,
L. (2023). The jiminy advisor: Moral agreements
among stakeholders based on norms and argumen-
tation. Journal of Artificial Intelligence Research,
77:737–792.
Liao, B., Slavkovik, M., and van der Torre, L. (2019).
Building jiminy cricket: An architecture for moral
agreements among stakeholders. In Proceedings of
the 2019 AAAI/ACM Conference on AI, Ethics, and
Society, pages 147–153.
Liu, G., Schulte, O., Zhu, W., and Li, Q. (2018). To-
ward interpretable deep reinforcement learning with
linear model u-trees. In Joint European Conference
on Machine Learning and Knowledge Discovery in
Databases, pages 414–429. Springer.
Liu, J. J. and Kwok, J. T.-Y. (2000). An extended genetic
rule induction algorithm. In Proceedings of the 2000
Congress on Evolutionary Computation. CEC00 (Cat.
No. 00TH8512), volume 1, pages 458–463. IEEE.
McBurney, P. and Parsons, S. (2004). Locutions for ar-
gumentation in agent interaction protocols. In Inter-
national Workshop on Agent Communication, pages
209–225. Springer.
Nofal, S., Atkinson, K., and Dunne, P. E. (2021). Com-
puting grounded extensions of abstract argumentation
frameworks. The Computer Journal, 64(1):54–63.
Puiutta, E. and Veith, E. M. (2020). Explainable rein-
forcement learning: A survey. In International cross-
domain conference for machine learning and knowl-
edge extraction, pages 77–95. Springer.
Quinlan, J. R. (1986). Induction of decision trees. Machine
learning, 1:81–106.
Quinlan, J. R. (1987). Generating production rules from
decision trees. In ijcai, volume 87, pages 304–307.
Citeseer.
Quinlan, J. R. (2014). C4. 5: programs for machine learn-
ing. Elsevier.
Rizzo, L. and Longo, L. (2018). A qualitative investigation
of the degree of explainability of defeasible argumen-
tation and non-monotonic fuzzy reasoning.
Sabbatini, F., Ciatto, G., Calegari, R., Omicini, A., et al.
(2021). On the design of psyke: a platform for
symbolic knowledge extraction. In CEUR WORK-
SHOP PROCEEDINGS, volume 2963, pages 29–48.
Sun SITE Central Europe, RWTH Aachen University.
Selbst, A. and Powles, J. (2018). “meaningful information”
and the right to explanation. In conference on fair-
ness, accountability and transparency, pages 48–48.
PMLR.
Szegedy, C., Zaremba, W., Sutskever, I., Bruna, J., Er-
han, D., Goodfellow, I., and Fergus, R. (2013). In-
triguing properties of neural networks. arXiv preprint
arXiv:1312.6199.
Tan, S., Caruana, R., Hooker, G., and Lou, Y. (2018).
Distill-and-compare: Auditing black-box models us-
ing transparent model distillation. In Proceedings of
the 2018 AAAI/ACM Conference on AI, Ethics, and
Society, pages 303–310.
Venturini, G. (1993). Sia: a supervised inductive algorithm
with genetic search for learning attributes based con-
cepts. In European conference on machine learning,
pages 280–296. Springer.
Verma, A., Murali, V., Singh, R., Kohli, P., and Chaudhuri,
S. (2018). Programmatically interpretable reinforce-
ment learning. In International Conference on Ma-
chine Learning, pages 5045–5054. PMLR.
Wachter, S., Mittelstadt, B., and Russell, C. (2017). Coun-
terfactual explanations without opening the black box:
Automated decisions and the gdpr. Harv. JL & Tech.,
31:841.
Weiss, S. M. and Indurkhya, N. (1991). Reduced complex-
ity rule induction. In IJCAI, pages 678–684.
Wiering, M. A. and Van Otterlo, M. (2012). Reinforce-
ment learning. Adaptation, learning, and optimiza-
tion, 12(3):729.
Wolberg, W., Mangasarian, O., Street, N., and Street,
W. (1995). Breast Cancer Wisconsin (Diagnos-
tic). UCI Machine Learning Repository. DOI:
https://doi.org/10.24432/C5DW2B.
Yu, L., Chen, D., Qiao, L., Shen, Y., and van der Torre, L.
(2021). A principle-based analysis of abstract agent
argumentation semantics. In Proceedings of the Inter-
national Conference on Principles of Knowledge Rep-
resentation and Reasoning, volume 18, pages 629–
639.
Zahavy, T., Ben-Zrihem, N., and Mannor, S. (2016). Gray-
ing the black box: Understanding dqns. In Interna-
tional Conference on Machine Learning, pages 1899–
1908. PMLR.
An A-Star Algorithm for Argumentative Rule Extraction
101
