
Cooperative Evacuation Guidance Methods in Large-Scale
Disaster Situations Based on Wi-Fi Sensing Data
Atsuo Ozaki
a
Department of Information Science and Technology, Osaka Institute of Technology, Osaka, Japan
Keywords: Multi-Agent, Disaster, Cooperation, Evacuation, Guidance, Wi-Fi, Sensing Data.
Abstract: This study introduces a Wi-Fi packet sensor developed to acquire headcount distribution data, which are
obtained by deploying several of these sensors in a large-scale event, as well as describes the results of
evaluating the proposed distributed and coordinated evacuation guidance method in a disaster using multi-
agent simulation. The results confirm that by balancing the guide loads, it is possible to evacuate all evacuees
from the venue in a shorter time than before the addition of the load balance. Furthermore, it was confirmed
that if the evacuation route indicated by the guide did not significantly change the congestion situation, it was
important for evacuees to choose another exit route at their discretion.
1 INTRODUCTION
In recent years, crisis management measures have
become increasingly necessary because of the
intensification of natural disasters and the spread of
epidemics. Additionally, it is necessary to actively
promote business improvement and development to
overcome the economic slump caused by global
unrest and other factors.
We aim to address these problems by identifying
the number of visitors and human flow in real time in
large commercial facilities and large-scale event
venues where a large number of people gather to
efficiently guide evacuations in the event of a
disaster, prevent infectious diseases by avoiding
congestion, and promote economic activity to
optimize store layouts in regular times (Yamada et al.,
2022; Asano et al., 2024; Watanabe et al., 2024).
In this paper, a Wi-Fi packet sensor developed for
low-cost, real-time detection of the number of people
is described and a distributed cooperative evacuation
guidance method is proposed as its application for a
potential disaster in a large-scale event held monthly
in Hirakata City, Osaka Prefecture, Japan. The
proposed method was implemented using multi-agent
simulation technology, and its evaluation the results
are discussed.
a
https://www.oit.ac.jp/english/research/ist/computer/
index.html#lab3202
Figure 1: Developed Wi-Fi packet sensor.
2 WI-FI SENSING
TECHNOLOGY FOR
DETECTING THE NUMBER OF
PEOPLE
2.1 Issues and Initiatives
The use of cameras can be a highly accurate method
for detecting the number of people in a place;
however, it is often avoided because of limitations
regarding camera location and blind spots, as well as
the fact that the cameras capture the visitor's face.
Another method is to use the location information
service (e.g., GPS) of a smartphone held by a visitor
to analyse human dynamics; however, this method
can only be used when a specific application is
running, and its accuracy is reduced indoors and
underground.
Ozaki, A.
Cooperative Evacuation Guidance Methods in Large-Scale Disaster Situations Based on Wi-Fi Sensing Data.
DOI: 10.5220/0013110600003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 1, pages 273-278
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
273

One method that can address these problems is to
estimate the number of people by detecting Wi-Fi
radio waves that penetrate materials such as wood and
glass and can detect people behind obstacles, thus
eliminating the aforementioned problems of blind
spots and personal information disclosure. Therefore,
it can be used indoors and underground. This Wi-Fi
sensing method uses a Wi-Fi packet sensor
(hereinafter referred to as "PS") to collect radio waves
periodically transmitted from Wi-Fi terminals, such
as smartphones, and then extracts and analyses data
such as the terminal's MAC address, detection time,
and signal strength to estimate the number of people.
According to a survey by Japan's Ministry of Internal
Affairs and Communications, the smartphone
ownership rate as of 2022 was 77.3% (MIC, 2023).
However, excluding younger age groups, almost
100% of people own smartphones, and most are
considered to have their smartphones and Wi-Fi
functions turned on. Therefore, we promote this
research and development to consider effectively
estimating the number of people using this method
(Toyomi et al., 2021; Toyomi et al., 2022).
2.2 Developed Wi-Fi Packet Sensor
Figure 1 shows the Wi-Fi PS. The detected Wi-Fi
signals are processed by a Raspberry Pi computer.
The Wi-Fi antenna mounted on the device can detect
radio waves within a radius of approximately 70 m
around the PS. The device is also equipped with a
battery that can run for approximately 12 h. A Long-
Term Evolution (LTE) antenna and Subscriber
Identity Module (SIM) card are also installed, and the
detected data can be transmitted to and stored in the
cloud so that the detection results can be checked in
real time from a remote site. The PS is lightweight
and compact, making it highly portable, and the
measurements can be started immediately after the
power is turned on. Therefore, the PS can be used for
last-minute events and for a variety of venues, both
large and small, as the number of PSs can be
increased according to the size of the venue.
At the main venue of "Hirakata-shuku Kurawanka
Goroku-ichi" (commonly called "Goroku-ichi")
1
, a
large-scale event held monthly in Hirakata City,
Osaka Prefecture, Japan, the number of visitors was
detected using the developed PS for 2 h, from 11:00
to 13:00, on November 8, 2020 (Sunday). The results
confirmed that the PS could detect the number of
visitors with reasonable accuracy, with a correlation
value of approximately 80% with the manually
1
https://www.gorokuichi.net/ (Japanese)
measured value (true value) (Toyomi et al., 2022).
The system is under continuous development and
improvement, and it currently exhibits a performance
of approximately 90% (Toyomi et al., 2024).
Figure 2: Goroku-ich image map (Japanese version).
3 APPLICATION TO
EVACUATION GUIDANCE IN
DISASTER SITUATIONS
3.1 Background
Goroku-ichi is a large-scale event held on the second
Sunday of every month in Hirakata City, which was
once an inn town located on a historical highway that
developed during the Edo period (Figure 2). As
Goroku-ichi attracts an average of 8,000 people and
more than 10,000 people at times, it is necessary to
take crisis management measures to deal with natural
disasters such as earthquakes, typhoons, and floods,
as well as the spread of diseases, such as the
coronavirus disease. In response to requests from the
Goroku-ichi office, we developed a PS to determine
the distribution of people in the Goroku-ichi venue,
which is important for crisis management measures,
and conducted a variety of field experiments.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
274

Because cars, motorcycles, bicycles, and other
vehicles travel in the Goroku-ichi venue, there are
four locations where traffic control is required, and
approximately ten security guards are deployed to
take charge of this task at each location. In this
section, we propose a decentralized cooperative
evacuation guidance method that assumes the case
where multiple security guards cooperate to guide
visitors to evacuate in the event of an earthquake in
the Goroku-ichi venue, and discuss the results of
implementing and evaluating the effectiveness of the
proposed method using multi-agent simulation
technology. Hereafter, the security guards are
referred to as "guides" who guide visitors during the
evacuation, and the Goroku-ichi visitors are referred
to as "evacuees."
3.2 Proposed Behavior Models for
Evacuation Guide
We examined two methods to efficiently guide a large
number of evacuees to evacuate the Goroku-ichi
venue. In both methods, it was assumed that each
guide had his own means of communication and
shared information with the others. It was also
assumed that the information on the number of
evacuees in the venue from multiple PSs was shared.
Method 1: Dynamically determine the zone that
each guide is in charge of Goroku-ichi venues are
divided into several areas for management. In this
method, each guide travels to one of the nearest
areas from the current location immediately after a
disaster occurs. However, to avoid overlapping the
areas they are in charge of, they pass through the
areas where there are already guides for the
evacuees, go to the area where no one is in charge,
and start evacuation guidance for evacuees.
However, if the information from the PS indicates
that the evacuation route (exit) is more crowded
than other routes, the guide informs the evacuees of
the route to the next nearest exit. After the
evacuation guidance is completed in the assigned
area, if there is still an area that has not been
evacuated, the guide will go to that area to begin the
evacuation guidance.
Method 2: Load equalization added to Method1.
This method divides the venue area equally into
numbers proportional to the number of guides and
assigns these divided areas to the guides. In this
case, the divided areas are assigned such that each
guide is in charge of an equal number of areas.
Immediately after a disaster occurs, the guide first
moves to the nearest area in the group of areas that
he is in charge of and begins to guide the evacuees.
The evacuee guiding method is the same as that
used in Method 1. After the guidance of the first
area is completed, the guide moves to the area
adjacent to the current area in his/her/their area
group that has the largest number of evacuees and
has not yet been evacuated, and guides the
evacuees. When all the guidance in the area group
for which he/she/they are in charge of is completed,
the guide moves to the area in charge of another
guide who has not yet completed the guidance, and
guides the evacuation.
3.3 Criteria for Judging Congestion for
Determining Evacuation Routes
The proposed methods assume that PSs are placed in
appropriate areas and that information on the number
of evacuees is shared by each guide to improve the
evacuation guidance efficiency. In the evaluation of
these methods in Goroku-ichi, we introduced α,
which calculates congestion of evacuees from a PS
placed at the intersection in a venue exit, where heavy
congestion is expected, and uses this as a decision-
making tool to select the appropriate evacuation route
(see Figure 3). α is expressed as follows:
α: = n/A (1)
where n is the number of evacuees present within the
PS measurement range and A is the road area within
the measurement range. Specifically, each guide must
sum all α on the evacuation route and communicate
the route with the smallest total value to the evacuees
as an optimal evacuation route.
Figure 3: Sensor placement near exits to calculate the
congestion degree α.
3.4 Evacuee Models
Evacuees remain in place until the guide tells them to
evacuate; when the guide provides them with an
evacuation route, they start evacuating and go to the
venue’s exit. If some evacuees started to move in the
vicinity, they would look at the surrounding situation,
start moving in the direction of most evacuees in
progress, and follow other evacuees, even if the route
was not communicated to them by the guide.
Cooperative Evacuation Guidance Methods in Large-Scale Disaster Situations Based on Wi-Fi Sensing Data
275
However, if the guide communicates a different route
in this state, the evacuees follow that route. During
the process of moving along the route, the evacuator
avoids a place by moving to the side if there is a
person in the place where he/she/them wants to go. If
there are no places to avoid, the evacuee waits for a
predetermined period. If the waiting state continues
due to congestion, the evacuation route and exits are
changed based on the route selection decision
criterion β, as follows:
β: = Tp-Tw-Td,
if β > 0, then: Maintain the current situation;
else: Select another route and exi
t
(2)
where Tp is the allowable time to maintain the current
situation, Tw is the time spent waiting due to the
inability to move from the current position, and Td is
the time to move from the current position to the
current target exit when uncrowded. In other words,
only Tp can be changed at the will of the evacuee,
indicating that the farther away from the exit, the
more likely the evacuee is to change his/her/their
intended route to the exit.
We also set the probability γ of selecting another
exit when β < 0. γ indicates the probability (%) of
selecting another nearest exit or any other exit, both
excluding the current intended exit. For example, if γ
= 0%, the exit is toward another nearest exit;
conversely, if γ = 100%, the exit is toward the other
exit.
4 EVALUATION
To evaluate the proposed method, we developed a
simulator for evacuation guidance after an earthquake
in Goroku-ichi and estimated the time required for all
evacuees to complete the evacuation from Goroku-
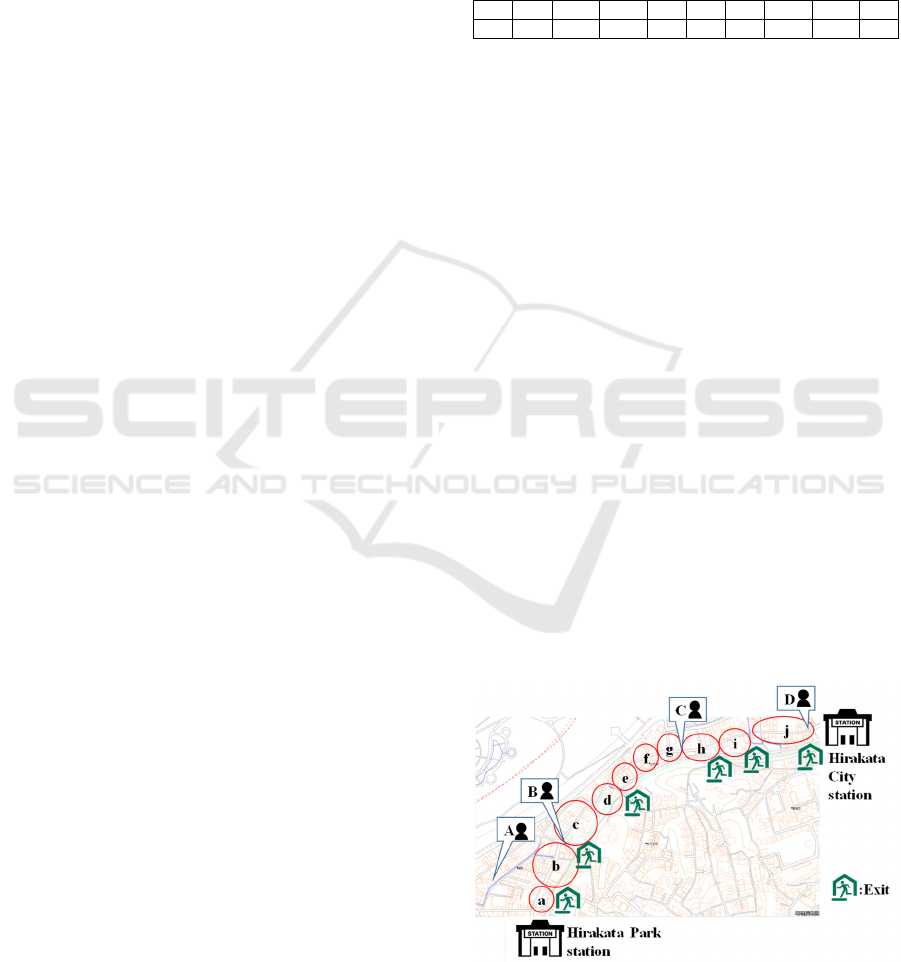
ichi venues. As shown in Figure 4, Goroku-ichi is
held within 1.1 km from Hirakata City Station to
Hirakata Park Station, and is a large-scale event with
approximately 200 stores located along a road parallel
to the Yodo River on the north side. Goroku-ichi
consists of ten management areas (Figure 4: a–j).
Additionally, points A–D in the figure are locations
where traffic control is required, such as when cars
cross venue and where security guards are placed at
all times.
4.1 Conditions and Settings
For the evaluation, the number of evacuees and their
assignments were based on the total number of
visitors (860) measured using the PSs in each of the
aforementioned areas on October 13, 2019 (Table 1).
Regarding the number of guides, as the labour cost of
security guards is an operational issue, two cases were
evaluated: one was the same as the current situation,
with a total of ten guides (A: 2, B: 3, C: 2, and D: 3),
and the other was a total of four guides, one assigned
to each of A–D.
Table 1: Initial number of evacuees in each area.
a
b
cdef g h i j
45 46 119 145 73 95 64 116 114 43
(Total:860)
Therefore, in Method 1, because the number of
areas is ten, if the number of guides is set to four, the
assignment of guides to each area is dynamic;
however, if the number of guides is ten, there is no
dynamic assignment because the number of guides is
equal to the number of areas. Meanwhile, for Method
2, the area of the Goroku-shi venue is divided equally
into 20 areas, and each guide is assigned to the same
number of areas. In other words, if there were four
guides, each was in charge of five areas, and if there
were ten guides, each was in charge of two areas.
Additionally, it was assumed that the guide would
spend a certain amount of time in each area guiding
the evacuees and that they would remain in an area
for a certain amount of time, which was set at 30 s for
this evaluation based on empirical evidence. The
communication of the evacuation route by the guide
to the evacuees was to be done by voice, and it was
assumed that it could be communicated to evacuees
within an 18-m radius around the guide's position,
this was also based on empirical evidence. Regarding
the evacuees' movement after obtaining information
on the evacuation route from other evacuees around
them, because this movement is propagated, it is
assumed that the information can be obtained from
people within 1 m of them. If no one was in front
Figure 4: Goroku-ich's ten management areas (a–j), guard
locations (A–D), and exits.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
276
of the evacuee, the moving speed of the guide and
evacuee was set to 1 m/s, following (Liberto et al.,
2020), considering the congestion situation. There
were six exits from the venue to the south that the
evacuees targeted, and these six exits were also set as
destinations for the evacuees in this evaluation (see
Figure 4). Furthermore, as the Goroku-shi venue is a
single road, when selecting an exit other than the
currently intended and next nearest exits, the opposite
of the next nearest exit is selected based on γ.
4.2 Results
Table 2 lists the evacuation time simulation results
(average of 100 trials) until all evacuees leave the
venue, assuming that evacuees do not change the
route (exit) communicated to them by the guides.
These results are based on a model that reflects the
mentality of evacuees who trust the routes
communicated to them through guides who know the
situation.
Table 2: Evacuation time (s) according to each method
when the number of guides is 10 and 4.
#Guides=10 #Guides=4
Method 1 716 908
Method 2 639 692
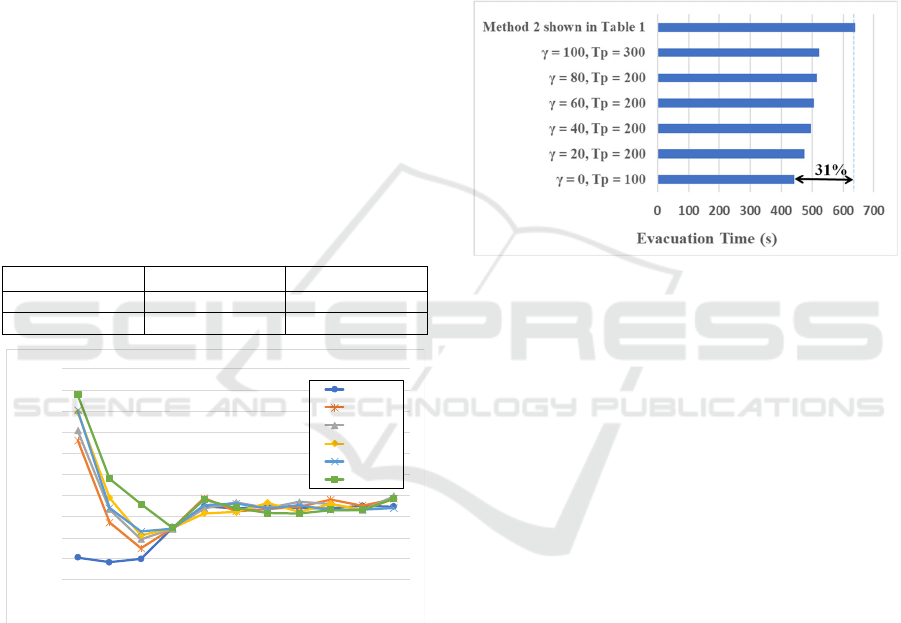
Figure 5: Evacuation time based on γ according to Tp.
Figure 5 also shows the results of changing γ in
20% increments applied to changing to other routes
(exits) and then changing Tp from 0 s to1000 s for
Method 2, which could evacuate quickly in the case
of ten realistic guides. In each case, the average value
was obtained from 50 trials. The results show that
when γ = 0% and Tp = 100 s, the minimum
evacuation time is 441 s; when γ = 100% and Tp = 0
s, the maximum evacuation time is 838 s. When Tp
was greater than 400 s, the difference in evacuation
time was almost the same, approximately 20 s, for
different γ values.
5 DISCUSSION
As can be seen in Table 2, Method 2 with four guides
is able to guide the evacuation in a shorter time than
Method 1 with ten guides. This is believed to be due
to the fact that in Method 2, after completing the
evacuation of their own area group, each guide went
to help other guides in unguided areas, thus balancing
the workload among the guides relatively well.
Conversely, in Method 1, there was a large imbalance
in the load between guides who were in charge of
high-load areas and those who were not.
Figure 6: Minimum evacuation time based on γ and Tp.
In Figure 5, for any γ, there is a minimum
evacuation time when Tp is less than 300 s. Figure 6
shows the minimum evacuation time and the γ and Tp
combination at that time for each of the cases shown
in Figure 5. The case with no route (exit) change
(Table 1: Method 2 with ten inductors) is also
included in this figure for reference. It was confirmed
that by changing other routes (exits) according to the
situation, the evacuation time could be reduced by
approximately 31% (Figure 6). Based on this result,
it can be concluded that the most efficient evacuation
method is to leave immediately and go to the next-
nearest exit if you are stopped by an obstacle during
evacuation and the congestion is not resolved after
waiting for some time. Although the route
information provided by the guide is important, the
situation changes from moment to moment.
Therefore, it is important for evacuees to make their
own decisions.
6 CONCLUSIONS
This paper describes a Wi-Fi packet sensor developed
to obtain data on the distribution of the number of
people, which is important for crisis management
measures against natural disasters and epidemics as
400
450
500
550
600
650
700
750
800
850
900
0 100 200 300 400 500 600 700 800 900 1000
Evacuation Time (s)
Tp (s)
γ = 0
γ = 20
γ = 40
γ = 60
γ = 80
γ = 100
Cooperative Evacuation Guidance Methods in Large-Scale Disaster Situations Based on Wi-Fi Sensing Data
277

well as for improving operations and developing
businesses. Using the data measured by this sensor on
the distribution of the number of people in a large-
scale event, the proposed evacuation guidance
method was evaluated using a multi-agent simulation.
As a result, it was confirmed that all evacuees could
be evacuated from the venue in less than one minute
by adding a way to balance the load assigned to each
guide. Furthermore, it was confirmed that even if the
evacuation route (exit) indicated by the guides did not
change the congestion situation, it was important for
evacuees to choose another route (exit) at their own
discretion. The simulation results showed that it is
important to take action based on one's own judgment
while referring to information rather than relying on
others for one's own life. In this study, the evaluation
was based on the distribution of the number of people
during daytime hours from 11:00 to 13:00. It is also
necessary to evaluate the situation during opening
and closing of the event (e.g. when visitors come
from Hirakata City and Hirakata Park Stations and
when they leave), when the distribution of people is
uneven around the two ends of the venue, which will
be investigated in future work. Additionally, methods
to further shorten the evacuation time must also be
investigated.
REFERENCES
Liberto, C., Nigro, M., Carrese, S., Mannini, L., Valenti, G.,
Zarelli, C. (2020). Simulation framework for pedestrian
dynamics: modelling and calibration. IET Intelligent
Transport Systems, Vol. 14 Iss. pages 1048-1057.
Yamada, C., Ozaki, A. (2022). Cooperative Evacuation
Guidance Method for Large-Scale Event. 37th
International Technical Conference on
Circuits/Systems, Computers, and Communications
(ITC-CSCC 2022), pages 922-925.
Watanabe, K., Toyomi, R., Ozaki, A. (2024). Study of
Distributed Cooperative Evacuation Guidance Model
Using Multiple Mobile Robots. 39th International
Technical Conference on Circuits/Systems, Computers,
and Communications (ITC-CSCC 2024), pages 1-6.
Asano, M., Toyomi, R., Ozaki, A. (2024). Distributed
Cooperative Evacuation Guidance Model Based on
Self-Driven Autonomous Agents. 29th International
Symposium on Artificial Life and Robotics (AROB-
ISBC-SWARM 2024), pages 24-28.
Ministry of Internal Affairs and Communications (MIC).
(2023). Telecommunications Usage Trends Survey. 2.
Mobile handset ownership. (Japanese)
https://www.soumu.go.jp/johotsusintokei/whitepaper/ja/r0
5/html/datashu.html#f00279
Toyomi, R., Fujino, Y., Ozaki, A. (2021). A Study on
Improved Method for Obtaining the Distribution of
People Using Wi-Fi Probe Request. The 36th
International Technical Conference on
Circuits/Systems, Computers and Communications
(ITC-CSCC 2021), pages 208-211.
Toyomi, R., Fujino, Y., Ozaki, A. (2022). Wi-Fi packet
sensing method for obtaining the number of people. The
Twenty-Seventh International Symposium on Artificial
Life and Robotics 2022 (AROB 27th 2022), pages 857-
860.
Toyomi, R., Ozaki, A. (2024). Development and evaluation
of a portable crowd estimation system using Wi-Fi.
International Journal of Artificial Life and Robotics,
Springer. https://doi.org/10.1007/s10015-024-00977-0
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
278
