
Fruit-HSNet: A Machine Learning Approach for Hyperspectral
Image-Based Fruit Ripeness Prediction
Ahmed Baha Ben Jmaa
1 a
, Faten Chaieb
1 b
and Anna Fabija
´
nska
2 c
1
Efrei Research Lab, Paris Panth
´
eon-Assas University, Paris, France
2
Institute of Applied Computer Science, Lodz University of Technology, Ł
´
od
´
z, Poland
Keywords:
Fruit Ripeness Prediction, Hyperspectral Image, DeepHS Fruit Dataset, Smart Agriculture.
Abstract:
Fruit ripeness prediction (FRP) is a classification-based agricultural computer vision task that has attracted
much attention, thanks to its wide-ranging advantages in agriculture field for both pre-harvest and post-harvest
management. Accurate and timely FRP can be achieved using machine/deep learning-based hyperspectral im-
age classification techniques. However, challenges including the limited availability of labeled data and the
lack of robust methods generalizable to various hyperspectral cameras and fruit types can compromise the
effectiveness of hyperspectral image-based FRP. Addressing these challenges, this paper introduces Fruit-
HSNet, a machine learning architecture specifically designed for hyperspectral classification of fruit ripeness.
Fruit-HSNet incorporates a spatio-spectral feature extraction module based on Fourier Transform and central
pixel spectral signature followed by learnable feature fusion and a classifier optimized for ripeness classifica-
tion. The proposed architecture was evaluated using the DeepHS Fruit dataset, the largest publicly available
labeled real-world hyperspectral dataset for predicting fruit ripeness, which includes five different types of
fruits—avocado, kiwi, mango, kaki, and papaya—captured with three distinct hyperspectral cameras at var-
ious stages of ripeness. Experimental results highlight that Fruit-HSNet substantially outperforms existing
deep learning methods, from baseline to state-of-the-art models, with improvements of 12%, achieving a new
state-of-the-art overall accuracy of 70.73%.
1 INTRODUCTION
In the field of smart agriculture, agricultural computer
vision is attracting increasing attention for various ap-
plications, from irrigation management to automated
classification of agricultural products, enabling auto-
mated and simplified agricultural tasks (Ghazal et al.,
2024; Luo et al., 2023; Lu and Young, 2020). Fruit
Ripeness Prediction (FRP) is an agricultural computer
vision task that involves classifying fruits to their de-
gree of ripeness, offering several advantages for both
pre-harvest and post-harvest management, including
minimizing losses, improving quality, and economiz-
ing resources (Rizzo et al., 2023).
Traditionally, FRP has been performed using
methods such as visual observation and chemical
analysis of the fruit. However, these techniques
are subjective, labor-intensive, and costly, involving
a
https://orcid.org/0009-0006-0333-2643
b
https://orcid.org/0000-0002-2968-2426
c
https://orcid.org/0000-0002-0249-7247
a significant margin of error while consuming hu-
man and material resources. The emergence of ma-
chine/deep learning and imaging technologies, in-
cluding hyperspectral imaging, has enabled the devel-
opment of new FRP methods by leveraging the power
of learning algorithms to learn hidden patterns. These
methods offer advantages over traditional methods,
such as the ability to make accurate and timely pre-
dictions (Rizzo et al., 2023; Ram et al., 2024).
Hyperspectral imaging (HSI), in particular, un-
like conventional imaging techniques, offers the ad-
vantage of capturing spatial and spectral informa-
tion across a wide range of the electromagnetic spec-
trum, providing details not visible to humans. For-
mally, a hyperspectral image H ∈ R
M×N×B
is defined
as a three-dimensional data cube with two spatial di-
mensions, M and N, representing spatial information,
and one spectral dimension, B, representing spectral
information (i.e., wavelength), encapsulating the re-
flectance properties of the materials present in the im-
age at different wavelengths. The intensity value of
each pixel at spatial coordinates (x, y) and wavelength
102
Ben Jmaa, A. B., Chaieb, F. and Fabija
´
nska, A.
Fruit-HSNet: A Machine Learning Approach for Hyperspectral Image-Based Fruit Ripeness Prediction.
DOI: 10.5220/0013110800003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 2, pages 102-111
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

λ corresponding to a specific spectral band can be de-
scribed as H(x, y, λ) = r
λ
, where r
λ
denotes the spec-
tral response or reflectance at that wavelength. The
entire spectral response H(x, y, :) = r for a pixel at
the spatial coordinates (x, y) represents the spectral
reflectance curve of the object at that location, en-
compassing its full spectral profile. These spectral
reflectance curves are essential for distinguishing ma-
terials based on their unique spectral properties, of-
ten related to their chemical composition and struc-
ture (Ahmad et al., 2022).
Hyperspectral image classification (HIC) has been
widely studied in the literature, and various meth-
ods have been proposed (Kumar et al., 2024; Ah-
mad et al., 2024; Ahmad et al., 2022). These range
from traditional machine learning methods such as
Support Vector Machines (SVM), k-Nearest Neigh-
bors (KNN), and dimensionality reduction tech-
niques, to deep learning methods based on convolu-
tion and attention techniques. However, the develop-
ment of these methods is application-specific aware,
which limits their generalizability. This makes the
adaptation of HIC to new applications a significant
challenge. Indeed, while state-of-the-art methods for
HIC have shown impressive results in certain applica-
tions, they fail to maintain comparable performance
across different applications (Frank et al., 2023).
In this context, several works and datasets
have been proposed for hyperspectral image-based
FRP (Zhu et al., 2017; Pinto Barrera et al., 2019;
Varga et al., 2021; Varga et al., 2023a; Frank et al.,
2023; Rizzo et al., 2023). Principally, the DeepHS
Fruit dataset (Varga et al., 2021; Varga et al., 2023a)
and the DeepHS-Net family of architectures (Varga
et al., 2021; Varga et al., 2023a; Varga et al., 2023b)
represent the state-of-the-art. The DeepHS Fruit
dataset is the largest commonly available real-world
hyperspectral dataset for FRP, distinguished by its va-
riety in the number of fruits, types of hyperspectral
cameras used, and stages of maturity. The DeepHS-
Net family of architectures, a convolution-based deep
learning methods, is specifically designed for hyper-
spectral classification of fruit ripeness. This fam-
ily includes two principal convolutional neural net-
work (CNN) architectures: (1) DeepHS-Net (Varga
et al., 2021), which uses depthwise separable 2D
convolutions, and (2) DeepHS-Hybrid-Net (Varga
et al., 2023a), which combines 2D and 3D depth-
wise separable convolutions. Additional variants de-
rived from these two architectures incorporate Hyve-
Conv (Hyperspectral Visual Embedding Convolu-
tion), a wavelength-aware 2D convolution (Varga
et al., 2023b). HyveConv employs a continuous rep-
resentation of convolution kernels, sampling these
kernels based on the wavelengths of the inputs. This
design makes the convolution independent of the
camera type used and efficiently reduces the number
of parameters.
Despite the performance demonstrated by
DeepHS-Net architectures in FRP, significant chal-
lenges remain unresolved. The lack of robust
methods that can generalize across different hyper-
spectral cameras and fruit types, with the limited
size of datasets, compromises the effectiveness of
hyperspectral image-based FRP. In response to these
limitations, this paper introduces Fruit-HSNet, an
architecture specifically designed for FRP from
hyperspectral images. The main objective is to ensure
consistent and accurate classification across different
hyperspectral cameras, fruit types, and stages of
ripeness.
Contributions. Our key contributions are summa-
rized as follows: (1) We propose Fruit-HSNet, a
new architecture specifically designed for fruit hy-
perspectral image classification to identify different
stages of fruit ripeness by leveraging spatio-spectral
descriptors, which include Fourier Transform-based
features, central pixel spectral signatures, and learn-
able feature fusion. (2) We conducted comprehensive
evaluations on the DeepHS Fruit dataset, the largest
publicly available labeled hyperspectral dataset for
fruit maturity prediction, which includes five dif-
ferent types of fruits—avocado, kiwi, mango, kaki,
and papaya—captured using three distinct hyperspec-
tral cameras. (3) We demonstrate that Fruit-HSNet
achieved a new state-of-the-art overall accuracy of
70.73% on the DeepHS Fruit benchmark dataset,
which is a 12% improvement over the previous best-
reported results, specifically in the challenging cate-
gories of avocados and kiwis, which are critical due
to their ripening processes.
Paper Organization. In the following, Section 2 de-
tails our methodology, including an exploratory anal-
ysis of the DeepHS Fruit dataset and the introduction
of the Fruit-HSNet architecture. Subsequent sections
evaluate the model’s performance, analyze the results,
and discuss conclusions along with future research di-
rections.
2 METHODOLOGY
2.1 DeepHS Fruit Dataset
DeepHS Fruit dataset (Varga et al., 2021; Varga et al.,
2023a) is the largest publicly available real-world hy-
perspectral dataset labeled for fruit ripeness predic-
Fruit-HSNet: A Machine Learning Approach for Hyperspectral Image-Based Fruit Ripeness Prediction
103
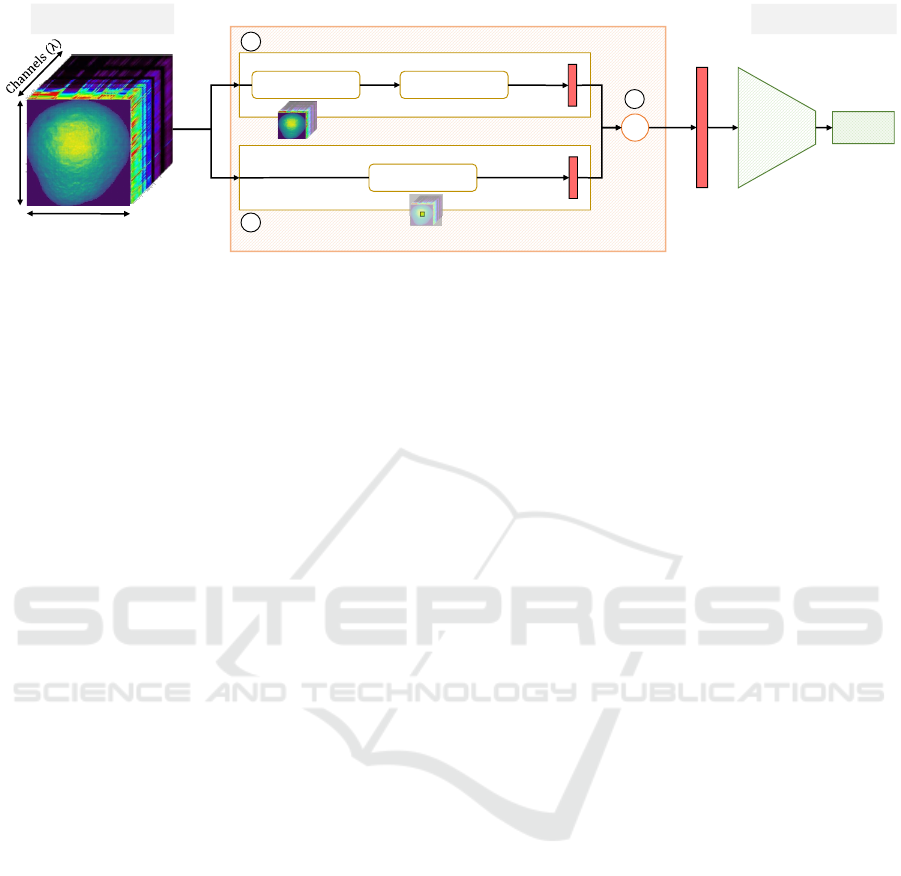
Output:
Classification structure
Spatio–Spectral
features
Input :
Hyperspectral Image
1
3
2
FFT Calculation
Magnitude
Calculation
+
Central Pixel
Extraction
(λ, x, y)
(λ, )
(λ, x, y) (λ, x, y)
Average
(λ, )
(2λ, )
Width (x)
Class
Fully
connected
network
classifier
Feature Extraction
Height
(y)
Spectral feature
Spatial feature
Learnable
Feature
Fusion
Figure 1: Illustration of Fruit-HSNet architecture.
tion. This dataset includes hyperspectral images of
five different fruit types, captured by three distinct
hyperspectral cameras, and categorized according to
various ripeness level.
Dataset Composition. The DeepHS Fruit dataset
consists of 30 configurations, where each configura-
tion, denoted as config
i
, corresponds to the dataset for
a specific fruit fruit
i
within the category categorie
i
,
captured with the camera camera
i
. The fruits (fruit
i
)
included are avocado, kiwi, mango, kaki, and pa-
paya. Fruit ripeness in this dataset is classified into
three distinct categories (categorie
i
): ripeness, firm-
ness, and sweetness. The cameras (camera
i
) used are
the Specim FX 10, Corning microHSI 410, and In-
nospec Redeye, with the following exceptions:
• No sweetness category for avocados.
• No records captured with Innospec Redeye cam-
era for mango, kaki, and papaya.
• No records captured with Corning microHSI cam-
era for kiwi.
Class Labels. For each config
i
, three classes are per
category, defined as follows:
• Ripeness: unripe, ripe, overripe.
• Firmness: too firm, perfect, too soft.
• Sweetness: not sweet, sweet, overly sweet.
Data Collection. In addition to the hyperspectral im-
age label, metadata are available including type of
fruit, orientation (front or back), capturing camera,
and wavelengths of the recorded spectra. The cam-
eras vary in their spectral band capture:
• Camera 1: Specim FX 10 captures 224 spectral
bands with a wavelength range of 400 to 1000 nm.
• Camera 2: Corning microHSI 410 captures 249
spectral bands with a wavelength range of 920 to
1730 nm.
• Camera 3: Innospec Redeye captures 252 spectral
bands, also spanning 920 to 1730 nm.
Dataset Distribution. DeepHS Fruit dataset com-
prises a total of 2706 labeled hyperspectral images,
distributed among the fruits as follows: 461 images
for Avocado, 568 images for Kiwi, 336 images for
Mango, 336 images for Kaki, and 252 images for Pa-
paya.
2.2 Fruit-HSNet: Proposed Method
This section introduces the architecture of Fruit-
HSNet and its working principle for fruit ripeness
classification. Let H ∈ R
M×N×B
represent a hyper-
spectral image, the input of the Fruit-HSNet archi-
tecture, where B is the number of spectral channels,
and M and N are the height and width of the image,
respectively. Fruit-HSNet extracts both spectral and
spatial features from H, which are informative and
discriminative, via a feature extraction module and
then classifies them via a classification module based
on a fully connected neural network.
Feature extraction is performed through a dual-
branch approach: (1) Spectral Feature Extraction, (2)
Spatial Feature Extraction, followed by (3) Learnable
Feature Fusion.
(1) Spectral Feature Extraction Module. In this
branch, a Fourier Transform (FT) is applied to H to
transform the spatial information H(:, :, λ) of each
spectral channel λ into the frequency domain:
F
λ
= FT (H (:, :, λ)), 1 ≤ λ ≤ B (1)
After applying FT across the spatial dimensions, the
magnitudes of F
λ
are computed and averaged over
each channel λ to form m. This frequency transfor-
mation makes the periodic patterns of textures and
structural changes in the fruit skin more discernible.
Indeed, changes in the fruit during ripening affect its
spectral signature. By transforming features into the
frequency domain, Fruit-HSNet can effectively cap-
ture patterns associated with various stages of fruit
ripeness that might be less evident in the spatial do-
main.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
104

(2) Spatial Feature Extraction Module. In this
branch, the central pixel spectral signature, s =
[s
λ
, 1 ≤ λ ≤ B], is extracted, where
s
λ
= H
M
2
,
N
2
, λ
, 1 ≤ λ ≤ B (2)
This allows focusing on potentially the most chemi-
cally informative region of the fruit, which is gener-
ally indicative of its overall ripeness.
(3) Learnable Feature Fusion. Features output from
the two branches are adaptively weighted by learn-
able parameters w
1
, w
2
∈ R
B
. The weighted features
are then concatenated to form a feature vector f that
combines both spectral and spatial information.
f = w
1
m + w
2
s (3)
The introduction of learnable weights for each fea-
ture type allows Fruit-HSNet to adaptively prioritize
which type of feature (spectral or spatial) is more in-
formative based on their relevance to fruit ripeness.
The adaptability provided by these weights enables
the model to be applied effectively across different
types of fruits, varying stages of ripeness, and differ-
ent camera types, where the importance of spectral
versus spatial information may differ.
3 EXPERIMENTS AND RESULTS
3.1 Experimental Setup
Experiments were conducted using 30 datasets from
the DeepHS Fruit dataset (Varga et al., 2021; Varga
et al., 2023a) as described in Section 2.1, adhering to
the standard data splitting and preprocessing proce-
dures outlined in (Frank et al., 2023) to ensure result
comparability.
Fruit-HSNet was trained on each dataset with the
cross-entropy loss function, using a batch size of 16.
Optimization involved the use of the Adam algorithm,
initiated with a learning rate of 0.001 alongside a
weight decay factor of 1 × 10
−4
. Additionally, a
learning rate scheduler reduced the rate by a factor of
0.7 every 10 epochs to fine-tune the training process.
Furthermore, a variable number of epochs is deter-
mined experimentally for each configuration to avoid
overfitting.
Fruit-HSNet’s fusion feature module uses learn-
able weights, initialized using a normal distribution.
In the classification module, the fully connected neu-
ral network comprises two linear layers with dimen-
sions [2λ, 512, 256], where λ ∈ {224, 249, 252}. Fol-
lowing these layers, batch normalization is applied,
Table 1: Comparative performance of Fruit-HSNet and
state-of-the-art methods across all fruits, hyperspec-
tral cameras, and stages of ripeness on DeepHS Fruit
dataset (Varga et al., 2021; Varga et al., 2023a).
∗
Results
were obtained from (Frank et al., 2023).
Method Accuracy
Baseline Methods
∗
Convolution-based Methods
2D CNN (spatial) (Paoletti et al., 2019) 44.85 %
ResNet-152 (He et al., 2016) 47.00 %
HybridSN (Roy et al., 2020) 48.74 %
ResNet-18 (He et al., 2016) 49.05 %
SpectralNET (Chakraborty and Trehan, 2021) 49.25 %
2D CNN (spectral) (Frank et al., 2023) 49.27 %
1D CNN (Paoletti et al., 2019) 51.30 %
Gabor CNN (Ghamisi et al., 2018) 52.57 %
EMP CNN (Ghamisi et al., 2018) 52.76 %
2D CNN (Paoletti et al., 2019) 54.42 %
3D CNN (Paoletti et al., 2019) 56.06 %
Attention/Transformer-based Methods
SpectralFormer (Hong et al., 2022) 41.71 %
Attention-based CNN (Lorenzo et al., 2020) 44.88 %
HiT (Yang et al., 2022) 48.16 %
SOTA Methods
DeepHS-Net Family
DeepHS-Hybrid-Net (Varga et al., 2023a) 55.01 %
DeepHS-Net+HyveConv (Varga et al., 2023b) 57.57 %
DeepHS-Net (Varga et al., 2021) 58.28 %
Fruit-HSNet (Ours) 70.73 %
along with ReLU (Rectified Linear Unit) activation
functions and dropout layers, implemented with a
dropout rate of 0.4.
3.2 Comparison with State-of-the-Art
This section presents a comparative performance
evaluation of Fruit-HSNet for hyperspectral classifi-
cation of fruit ripeness. The evaluation covers specific
aspects of performance, starting with a general eval-
uation across all fruits, hyperspectral cameras, and
stages of ripeness in Section 3.2.1. It is followed
by detailed evaluations focusing on fruit-specific and
camera-specific variations in Sections 3.2.2 and 3.2.3,
respectively. The section concludes with an in-depth
performance analysis for two critical case studies: av-
ocados and kiwis.
3.2.1 Global Performance Evaluation
In this part of the evaluation, we compared Fruit-
HSNet across all fruits, hyperspectral cameras, and
stages of ripeness against baseline and existing state-
of-the-art methods. Baseline methods encompass
deep learning models for hyperspectral image classifi-
cation, ranging from convolutional to attention mech-
anisms, including 2D and 3D CNN variants, and
adapted transformer architectures. The state-of-the-
art models are represented by the DeepHS-Net family
Fruit-HSNet: A Machine Learning Approach for Hyperspectral Image-Based Fruit Ripeness Prediction
105

Accuracy
Precision
Recall
F1-score
κ
30
40
50
60
70
58.28
56.4
59.02
53.39
32.55
70.73
68.67
70.73
67.49
52.13
Performance (%)
DeepHS-Net
Fruit-HSNet (Ours)
Figure 2: Performance metrics of Fruit-HSNet across all
fruits, hyperspectral cameras, and stages of ripeness.
of convolution-based methods.
In Table 1, we report the overall classification ac-
curacy for each method. This accuracy metric is cal-
culated as the average across 30 diverse datasets, each
representing a unique combination of fruit type, cam-
era type, and ripeness category, thus providing a ro-
bust measure of model generalizability and effective-
ness. Subsequently, the DeepHS-Net method is used
for detailed benchmarking as it is the best-performing
competitor. Furthermore, to provide a detailed analy-
sis of performance, various classification metrics, in-
cluding accuracy, precision, recall, F1-score, and Co-
hen’s Kappa (κ), were reported in Figure 2 to compare
Fruit-HSNet against the DeepHS-Net method.
3.2.2 Fruit-Specific Performance Evaluation
In this section, performance was analyzed for each
fruit type. An overview of the classification perfor-
mance was presented in Table 2 and Figure 3a, fol-
lowed by a detailed analysis for each fruit in each cat-
egory (ripeness, fruitiness, sweetness) in Table 3.
3.2.3 Camera-Specific Performance Evaluation
To assess the robustness of Fruit-HSNet across var-
ious hyperspectral cameras, we evaluated its perfor-
mance by presenting the behavior of classification
performance in a global manner in Table 4 and Fig-
ure 3b, and in detailed form for each fruit ripeness
category in Table 5.
3.2.4 Detailed Performance Evaluation for
Avocado and Kiwi
As avocados and kiwis have a delicate ripeness cy-
cle, this section details the performance of these fruits
Table 2: Fruit-specific performance comparison of Fruit-
HSNet.
DeepHS-Net Fruit-HSNet (Ours)
Avocado
Overall Accuracy 77.62% 85.19% (↑ 7.57%)
Average Accuracy 77.62% 82.91% (↑ 5.29%)
F1-score 76.22% 84.26% (↑ 8.04%)
κ 66.03% 76.52% (↑ 10.49%)
Kiwi
Overall Accuracy 60.11% 71.23% (↑ 11.12%)
Average Accuracy 60.11% 63.69% (↑ 3.58%)
F1-score 58.02% 68.21% (↑ 10.19%)
κ 36.36% 52.73% (↑ 16.37%)
Mango
Overall Accuracy 42.59% 65.28% (↑ 22.69%)
Average Accuracy 42.59% 60.83% (↑ 18.24%)
F1-score 34.80% 63.73% (↑ 28.93%)
κ 3.51% 44.86% (↑ 41.35%)
Kaki
Overall Accuracy 51.85% 59.72% (↑ 7.87%)
Average Accuracy 44.87% 52.13% (↑ 7.26%)
F1-score 42.03% 51.08% (↑ 9.05%)
κ 21.37% 33.83% (↑ 12.46%)
Papaya
Overall Accuracy 62.96% 72.23% (↑ 9.27%)
Average Accuracy 55.64% 66.30% (↑ 10.66%)
F1-score 55.90% 70.17% (↑ 14.27%)
κ 35.51% 52.69% (↑ 17.18%)
Table 3: Detailed fruit-specific performance comparison of
Fruit-HSNet across ripeness, firmness, and sweetness.
DeepHS-Net Fruit-HSNet (Ours)
Ripeness
Avocado 77.16%
87.04% (↑ 9.88%)
Kiwi 57.87% 79.86% (↑ 21.99%)
Mango 41.67% 54.17% (↑ 12.50%)
Kaki 45.84% 50.00% (↑ 4.17%)
Papaya 51.85% 77.78% (↑ 25.93%)
Firmness
Avocado 78.09% 83.33% (↑ 5.25%)
Kiwi 63.61% 72.47% (↑ 8.86%)
Mango 43.06% 70.83% (↑ 27.77%)
Kaki 63.89% 66.67% (↑ 2.77%)
Papaya 70.37% 77.78% (↑ 7.41%)
Sweetness
Kiwi 58.86% 61.35% (↑ 2.49%)
Mango 43.06% 70.84% (↑ 27.78%)
Kaki 45.83% 62.50% (↑ 16.67%)
Papaya 66.67% 61.12% (↓ 5.55%)
by camera type and by ripeness category. A detailed
analysis of the two categories, ripeness and firmness,
is presented in Tables 6 and 7, including standard clas-
sification metrics (accuracy, F1-score, and κ).
3.3 Ablation Study
In this section, we investigate the influence of
key architectural components of Fruit-HSNet on the
model’s overall performance.
Spectral Feature Extraction Module Ablation. To
determine the best discriminative spectral feature ex-
traction module for FRP-based hyperspectral image,
we compared the performance of Fruit-HSNet using
Fourier Transform versus Wavelet Transform in ta-
ble 8.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
106
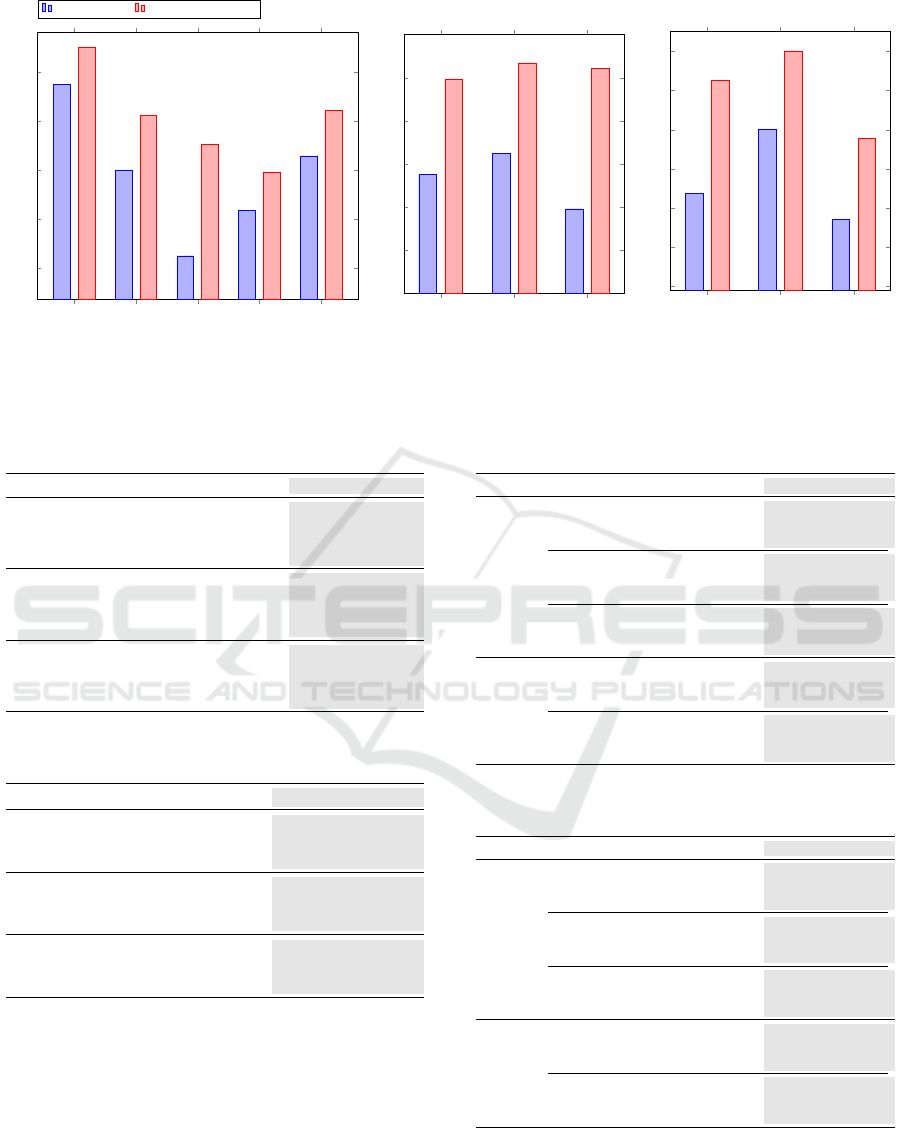
Avocado
Kiwi
Mango
Kaki
Papaya
40
50
60
70
80
77.62
60.11
42.59
51.85
62.96
85.19
71.23
65.28
59.72
72.23
Overall Accuracy (%)
DeepHS-Net
Fruit-HSNet (Ours)
(a) By Fruit Type
Camera 1
Camera 2
Camera 3
45
50
55
60
65
70
75
58.83
61.2
54.81
69.81
71.72
71.11
Overall Accuracy (%)
(b) By Camera Type
Ripeness
Firmness
Sweetness
45
50
55
60
65
70
75
56.9
65.1
53.6
71.34
75.04
63.95
Overall Accuracy (%)
(c) By Ripeness Category
Figure 3: Performance Evaluation of Fruit-HSNet for hyperspectral classification of fruit ripeness.
Table 4: Camera-specific performance comparison of Fruit-
HSNet.
DeepHS-Net Fruit-HSNet (Ours)
Camera 1
Overall Accuracy 58.83% 69.81% (↑ 10.98%)
Average Accuracy 52.79% 63.98% (↑ 11.19%)
F1-score 53.12% 67.12% (↑ 14%)
κ 31.42% 51.63% (↑ 20.21%)
Camera 2
Overall Accuracy 61.20% 71.72% (↑ 10.52%)
Average Accuracy 55.01% 65.50% (↑ 10.49%)
F1-score 54.92% 67.67% (↑ 12.75%)
κ 35.19% 52.09% (↑ 16.9%)
Camera 3
Overall Accuracy 54.81% 71.11% (↑ 16.3%)
Average Accuracy 52.03% 67.78% (↑ 15.75%)
F1-score 50.82% 68.15% (↑ 17.33%)
κ 29.90% 53.60% (↑ 23.70%)
Table 5: Detailed camera-specific performance comparison
of Fruit-HSNet across ripeness, firmness, and sweetness.
DeepHS-Net Fruit-HSNet (Ours)
Ripeness
Camera 1 53.70% 61.94% (↑ 8.24%)
Camera 2 61.57% 74.30% (↑ 12.73%)
Camera 3 55.55% 88.89% (↑ 33.33%)
Firmness
Camera 1 64.70% 76.76% (↑ 12.06%)
Camera 2 69.44% 77.08% (↑ 7.64%)
Camera 3 57.40% 66.67% (↑ 9.26%)
Sweetness
Camera 1 57.90% 70.95% (↑ 13.05%)
Camera 2 49.69% 61.11% (↑ 11.42%)
Camera 3 48.15% 44.44% (↓ 3.71%)
Spatial Feature Extraction Module Ablation. We
studied three different methods for extracting spa-
tial features: (1) central pixel across all spectral
bands (the spectral signature of the central pixel),
(2) mean of all pixels across all spectral bands (the
average spectral signature), (3) variance of all pixels
across all spectral bands (the variance in spectral sig-
natures across all pixels) (See Table 8).
Feature Fusion Ablation. In this part, we eval-
uate the performance of concatenating spatial and
Table 6: Detailed performance evaluation for avocado and
kiwi (Ripeness categorie).
DeepHS-Net Fruit-HSNet (Ours)
Avocado
Camera 1
Accuracy 83.33% 83.33% (↑ 0%)
F1-score 82.94% 83.20% (↑ 0.26%)
κ 75.00% 75.00% (↑ 0%)
Camera 2
Accuracy 88.89% 88.89% (↑ 0%)
F1-score 88.57% 88.57% (↑ 0%)
κ 83.33% 83.33% (↑ 0%)
Camera 3
Accuracy 59.26% 88.89% (↑ 29.63%)
F1-score 52.17% 88.57% (↑ 36.4%)
κ 38.89% 83.33% (↑ 44.44%)
Kiwi
Camera 1
Accuracy 63.89% 70.83% (↑ 6.94%)
F1-score 64.55% 71.11% (↑ 6.56%)
κ 45.83% 56.25% (↑ 10.42%)
Camera 3
Accuracy 51.85% 88.89% (↑ 37.04%)
F1-score 47.96% 88.57% (↑ 40.88%)
κ 27.78% 83.33% (↑ 55.55%)
Table 7: Detailed performance evaluation for avocado and
kiwi (firmness categorie).
DeepHS-Net Fruit-HSNet (Ours)
Avocado
Camera 1
Accuracy 75.00% 83.33% (↑ 8.33%)
F1-score 78.52% 83.33% (↑ 4.81%)
κ 62.90% 70.37% (↑ 7.47%)
Camera 2
Accuracy 96.30% 100% (↑ 3.7%)
F1-score 96.70% 100% (↑ 3.3%)
κ 94.00% 100% (↑ 6%)
Camera 3
Accuracy 62.96% 66.67% (↑ 3.71%)
F1-score 58.43% 61.90% (↑ 3.47%)
κ 42.05% 47.06% (↑ 5.01%)
Kiwi
Camera 1
Accuracy 75.36% 78.26% (↑ 2.9%)
F1-score 75.56% 74.58% (↓ 0.98%)
κ 58.35% 60.88% (↑ 2.53%)
Camera 3
Accuracy 51.85% 66.67% (↑ 14.82%)
F1-score 50.47% 64.13% (↑ 13.66%)
κ 27.78% 50.00% (↑ 22.22%)
spectral features compared to using either spatial or
spectral features alone. This aims to demonstrate
the added value of integrating spectro-spatial fea-
tures in enhancing the classification accuracy of Fruit-
Fruit-HSNet: A Machine Learning Approach for Hyperspectral Image-Based Fruit Ripeness Prediction
107

Table 8: Feature choices impact on Fruit-HSNet performance.
∗
calculated across all spectral bands.
Model Variant Accuracy Drop in Performance
Fruit-HSNet (Ours) 70.73 % —
Fruit-HSNet with Wavelet Transform 52.74 % ↓ 17.99%
Fruit-HSNet with average of all pixels
∗
62.98 % ↓ 7.75%
Fruit-HSNet with variance of all pixels
∗
59.92 % ↓ 10.81%
Table 9: Impact of introducing feature fusion module and learnable mechanism on Fruit-HSNet performance.
∗
FE denotes
Feature Extraction.
Model Variant Accuracy Drop in Performance
Fruit-HSNet (Ours) 70.73 % —
Fruit-HSNet w/o spectral FE
∗
module 48.60 % ↓ 22.13 %
Fruit-HSNet w/o spatial FE
∗
module 58.40 % ↓ 12.33 %
Fruit-HSNet w/o learnable feature fusion 60.96 % ↓ 9.77 %
HSNet (See Table 9).
Ablation of Learnable Mechanisms in Feature Fu-
sion. In this part, we compare the efficiency of con-
catenating learned features versus a simple concatena-
tion (without learning) of features. The learned fusion
aims to intelligently combine features in a way that
maximizes the relevant information from each feature
extraction block (See Table 9).
4 FINDINGS AND ANALYSIS
How effective is Fruit-HSNet in hyperspectral
image-based fruit ripeness prediction, and how
does it compare to state-of-the-art methods? The
results presented in Table 1 and Figure 2 demonstrate
the effectiveness of Fruit-HSNet for hyperspectral
image-based fruit ripeness prediction. Fruit-HSNet
produces very promising results despite being trained
on a small dataset. The success of our method is due
to two factors: the use of (1) informative and discrim-
inative spatial and spectral features for fruit ripeness
classification, and (2) a learnable feature fusion mech-
anism that naturally applies attention to the spatio-
spectral features, effectively capturing the most rel-
evant features for the candidate fruit, camera, and/or
ripeness stage. We detail and discuss our evaluations
below.
Fruit-HSNet clearly outperforms other methods,
ranging from baseline to state-of-the-art, with an
accuracy of 70.73%. Previous models, which are
considered state-of-the-art for this dataset, such as
DeepHS-Net, achieve accuracy and F1-score perfor-
mances of 58.28% and 53.39%, respectively, indicat-
ing a significant improvement by Fruit-HSNet: an
increase of 12.45% in accuracy and 14.1% in F1-
score. This improvement can be considered promis-
ing since the results on this dataset have saturated
around the 50% range, as presented in 1.
Attention/transformer-based methods generally
show inferior performance compared to convolution-
based methods, suggesting that attention-based archi-
tectures do not capture the spatial and spectral fea-
tures of hyperspectral images as effectively for this
specific application. This reaffirms the observation
that state-of-the-art methods for hyperspectral image
classification, which have shown impressive results in
certain applications, fail to maintain comparable per-
formance for different applications, emphasizing the
need to adapt attention mechanisms for the specificity
of this application.
Analyzing the performance based on the Kappa
metric further confirms the superior performance of
Fruit-HSNet. While DeepHS-Net shows reasonable
accuracy, its Kappa metric is relatively low at 32.55%.
Fruit-HSNet, on the other hand, achieves a Kappa
of 52.13%, representing an improvement of 19.58%,
thereby enhancing the reliability and consistency of
predictions in scenarios with imbalanced class distri-
butions, demonstrating the robustness of Fruit-HSNet
to variations in input data.
What is the performance of Fruit-HSNet specific
to each type of fruit? So far, we have assessed the
performance across all fruits, hyperspectral cameras,
and stages of ripeness. We are now analyzing the per-
formance of Fruit-HSNet by fruit type. Table 2 and
Figure 3a show that Fruit-HSNet consistently outper-
forms DeepHS-Net across all fruit types (Avocado,
Kiwi, Mango, Kaki, Papaya) in terms of all metrics
including Overall Accuracy, Average Accuracy, F1-
score, and Cohen’s kappa coefficient. The improve-
ment margins in Fruit-HSNet over DeepHS-Net are
significant.
According to the F1-score, which combines preci-
sion and recall, Fruit-HSNet shows an improvement
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
108

in predicting avocado ripeness: an increase of 8.04%.
For the Kiwi fruit, Fruit-HSNet demonstrates im-
provements across all metrics as well, with a signif-
icant increase in the kappa metric by 16.37%, indicat-
ing a more reliable model performance. For Mango,
the least predictable fruit in terms of performance
for DeepHS-Net, with an overall accuracy of 42.59%
and a kappa of 3.51%, we note spectacular improve-
ments with Fruit-HSNet, showing an improvement of
22.69% and 41.35% respectively, indicating increased
sensitivity of Fruit-HSNet to the spectral characteris-
tics of this particular fruit, and validating the hypoth-
esis of the generalizability of our method across var-
ious fruit types. Both Kaki and Papaya show signif-
icant improvements, particularly in the F1 and kappa
scores, indicating a better balance between precision
and recall.
In now analyzing the performance of each fruit
by stage of ripeness, Table 3 shows that Fruit-HSNet
is not only globally more accurate but also better at
capturing specific quality attributes of each fruit: For
ripeness, we note significant improvements for all
fruits, with substantial enhancements for Kiwi and
Mango. This indicate a better feature extraction ca-
pability of Fruit-HSNet to discern spectral signatures
related to ripeness. Regarding firmness, all fruits
show performance improvement. In particular, the
performance of Kiwi and Mango has significantly
increased, due to the increased sensitivity of Fruit-
HSNet to repetitive textural attributes detectable by
the spatial feature extraction module based on Fourier
transform. Sweetness, a more subtle and complex
attribute to capture spectrally, also shows improve-
ments, especially in Mango and Kaki.
How does the performance of Fruit-HSNet vary
with different hyperspectral cameras? The perfor-
mance of Fruit-HSNet was evaluated using three dif-
ferent hyperspectral cameras, each with unique spec-
tral sensitivities. The results, detailed in Tables 4
and 5, reveal significant variations in model efficiency
depending on the camera used, highlighting the cru-
cial impact of imaging hardware on the task of hyper-
spectral image-based fruit ripeness prediction.
Camera 1 (Specim FX 10) operates in the visi-
ble to near-infrared (VNIR) range. With this camera,
Fruit-HSNet achieved an overall accuracy of 69.81%,
an improvement of 10.98% over DeepHS-Net. The
average accuracy increased by 11.19% to 63.98%,
and the F1-score increased by 14% to 67.12%. The
Kappa coefficient improved by 20.21% to 51.63%.
These improvements indicate that the spectral infor-
mation in the VNIR range is effectively used by Fruit-
HSNet, enhancing the discrimination of fruit qual-
ity attributes such as surface color and certain visible
chemical compounds.
Cameras 2 (Corning microHSI 410) and 3 (In-
nospec Redeye) both operate in the short-wave in-
frared (SWIR) range, covering wavelengths from 920
to 1730 nm. Despite similar spectral ranges and num-
ber of bands, subtle differences in sensor technology
and spectral sensitivity may explain the performance
variations.
With Camera 2, Fruit-HSNet achieved an overall
accuracy of 71.72%, an improvement of 10.52%, and
an average accuracy of 65.50%, increased by 10.49%.
The F1-score increased by 12.75% to 67.67%, and the
Kappa coefficient improved by 16.9% to 52.09%. The
SWIR range captured by Camera 2 is sensitive to the
internal qualities of fruits, such as moisture content
and structural properties, which are crucial for assess-
ing attributes like firmness and internal composition.
Camera 3 offered the most significant improve-
ments. Fruit-HSNet achieved an overall accu-
racy of 71.11%, representing the highest increase
of 16.3%. The average accuracy improved by 15.75%
to 67.78%, and the F1-score increased by 17.33%
to 68.15%. The Kappa coefficient markedly increased
by 23.7% to 53.60%. Notably, for the ripeness cri-
terion, Camera 3 achieved an exceptional accuracy
of 88.89%, an improvement of 33.33%. This suggests
that the sensor characteristics of Camera 3 are partic-
ularly effective at capturing spectral features associ-
ated with fruit maturation processes, such as changes
in water absorption bands and alterations in chemical
composition.
However, performance variations across different
quality criteria underscore the influence of camera
characteristics on the task of FRP. For firmness, Cam-
eras 1 and 2 achieved higher accuracies (76.76% and
77.08%, respectively) compared to 66.67% for Cam-
era 3. This implies that the spectral features related
to fruit properties that influence firmness are better
captured by Cameras 1 and 2. Regarding sweetness,
Camera 1 obtained the highest accuracy at 70.95%,
showing an improvement of 13.05%. Camera 2 fol-
lows with an accuracy of 61.11%, while Camera 3
showed a decrease in performance to 44.44%, indicat-
ing a drop of 3.71%. This decrease cannot be decisive
regarding Camera 3, as the sweetness with Camera 3
contains only the kiwi fruit.
This confirms that Fruit-HSNet is generalizable
across all types of cameras, as it achieves high results.
How robust is Fruit-HSNet for predicting the
ripeness of avocados and kiwis? In this section,
we focus on analyzing the performance of avocados
and kiwis given the particular and delicate nature of
their ripening process. Tables 6 and 7 show that
Fruit-HSNet accurately predicts the ripeness of avo-
Fruit-HSNet: A Machine Learning Approach for Hyperspectral Image-Based Fruit Ripeness Prediction
109

cados and kiwis across different hyperspectral cam-
eras. Compared to DeepHS-Net, Fruit-HSNet demon-
strates substantial improvements.
For avocados, Fruit-HSNet showed consistent and
superior performance across three cameras: (Cam-
era 1) Fruit-HSNet improved over DeepHS-Net in
terms of F1-score, achieving a similarly high accu-
racy of 83.33%. (Camera 2) Like DeepHS-Net, Fruit-
HSNet demonstrated excellent performance, with an
accuracy of 88.89%, an F1-score of 88.57%, and a
kappa statistic of 83.33%. (Camera 3) Fruit-HSNet
significantly outperformed DeepHS-Net, with a sub-
stantial increase of 29.63% in accuracy, 36.4% in F1-
score, and 44.44% in kappa statistic.
For kiwis, the performance of Fruit-HSNet was
also superior with two cameras: (Camera 1) An in-
crease of 6.94% in accuracy and 6.56% in F1-score.
(Camera 3) An increase of 37.04% in accuracy and
40.88% in F1-score.
How does the choice of spectral feature extraction
module affect the performance of Fruit-HSNet?
As shown in Table 8, the choice between the Fourier
Transform and the Wavelet Transform for spectral
feature extraction significantly influences the model’s
accuracy. The Fourier Transform based feature ex-
traction bloc demonstrated a superior overall accu-
racy, with an improvement of 17.99% compared to
the Wavelet Transform. This suggests that the peri-
odic patterns of textures and structural changes in the
fruit skin extracted by the Fourier Transform are more
discernible than those captured by the Wavelet Trans-
form, which focuses on local frequency and time in-
formation.
How does the choice of spatial feature extrac-
tion module influence the performance of Fruit-
HSNet? Table 8 presents a comparison of different
methods for extracting spatial features. Extracting the
spectral signature from the central pixel leads to the
highest accuracy, which is an improvement of 7.75%
and 10.81% over using the mean and variance of pix-
els per spectral band, respectively. These results un-
derline that the most chemically informative region of
the fruit is the center, which is generally indicative of
its overall ripeness.
What is the significance of employing spatio-
spectral features in improving Fruit-HSNet per-
formance? The integration of spatial and spectral
features is further validated by Table 9, where the
combination of spatio-spectral features surpasses spa-
tial or spectral features with improvements of 22.13%
and 12.33%, respectively. This validates the impor-
tance of a spatio-spectral approach in the classifica-
tion of hyperspectral images, as discussed in (Kumar
et al., 2024; Ahmad et al., 2024; Frank et al., 2023;
Ahmad et al., 2022).
What impact do learnable mechanisms in feature
fusion have on the performance of Fruit-HSNet?
Table 9 explores the effect of feature fusion with and
without learning. Incorporating learning in the fea-
ture fusion process led to an improvement of 9.77%.
This improvement emphasizes that the introduction of
learnable weights for each feature type allows Fruit-
HSNet to adaptively prioritize which type of feature
(spectral or spatial) is more informative based on their
relevance to fruit ripeness.
5 CONCLUSION AND FUTURE
WORK
In this paper, we introduce Fruit-HSNet, a novel ma-
chine learning architecture specifically designed for
hyperspectral image-based fruit ripeness prediction.
Fruit-HSNet features a small-simple architecture that
integrates spatio-spectral feature extraction based on
Fourier transform and the central pixel’s spectral sig-
nature, followed by learnable feature fusion and a
deep fully connected neural network. The experi-
ments conducted on the DeepHS Fruit dataset demon-
strated that Fruit-HSNet outperforms existing base-
lines and state-of-the-art methods across five fruits
and three hyperspectral cameras, achieving a new
state-of-the-art overall accuracy of 70.73%.
Future work involves continuous improvement of
fruit ripeness prediction results through the integra-
tion of an attention mechanism to select the best fea-
tures. Additionally, for real-world applications, fu-
ture work will focus on integrating Fruit-HSNet into
IoT devices and mobile platforms to facilitate real-
time ripeness prediction.
ACKNOWLEDGEMENTS
This work was supported by the Agence Universi-
taire de la Francophonie (AUF) through the IntenSciF
program as part of the BIO-Serr (Intelligent Toolbox
for Greenhouse Establishment and Monitoring Assis-
tance) Project.
REFERENCES
Ahmad, M., Distifano, S., Khan, A. M., Mazzara, M., Li,
C., Yao, J., Li, H., Aryal, J., Vivone, G., and Hong,
D. (2024). A comprehensive survey for hyperspectral
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
110

image classification: The evolution from conventional
to transformers. arXiv abs/2404.14955.
Ahmad, M., Shabbir, S., Roy, S. K., Hong, D., Wu, X.,
Yao, J., Khan, A. M., Mazzara, M., Distefano, S., and
Chanussot, J. (2022). Hyperspectral image classifica-
tion—traditional to deep models: A survey for future
prospects. IEEE Journal of Selected Topics in Applied
Earth Observations and Remote Sensing, 15:968–999.
Chakraborty, T. and Trehan, U. (2021). Spectralnet: Ex-
ploring spatial-spectral waveletcnn for hyperspectral
image classification. ArXiv, abs/2104.00341.
Frank, H., Varga, L. A., and Zell, A. (2023). Hyperspec-
tral benchmark: Bridging the gap between hsi applica-
tions through comprehensive dataset and pretraining.
arXiv preprint arXiv:2309.11122.
Ghamisi, P., Maggiori, E., Li, S., Souza, R., Tarablaka, Y.,
Moser, G., De Giorgi, A., Fang, L., Chen, Y., Chi, M.,
Serpico, S. B., and Benediktsson, J. A. (2018). New
frontiers in spectral-spatial hyperspectral image clas-
sification: The latest advances based on mathemati-
cal morphology, markov random fields, segmentation,
sparse representation, and deep learning. IEEE Geo-
science and Remote Sensing Magazine, 6(3):10–43.
Ghazal, S., Munir, A., and Qureshi, W. S. (2024). Com-
puter vision in smart agriculture and precision farm-
ing: Techniques and applications. Artificial Intelli-
gence in Agriculture, 13:64–83.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In 2016 IEEE Con-
ference on Computer Vision and Pattern Recognition,
CVPR 2016, Las Vegas, NV, USA, June 27-30, 2016,
pages 770–778. IEEE Computer Society.
Hong, D., Han, Z., Yao, J., Gao, L., Zhang, B., Plaza, A.,
and Chanussot, J. (2022). Spectralformer: Rethinking
hyperspectral image classification with transformers.
IEEE Trans. Geosci. Remote. Sens., 60:1–15.
Kumar, V., Singh, R. S., Rambabu, M., and Dua, Y. (2024).
Deep learning for hyperspectral image classification:
A survey. Computer Science Review, 53:100658.
Lorenzo, P. R., Tulczyjew, L., Marcinkiewicz, M., and
Nalepa, J. (2020). Hyperspectral band selection using
attention-based convolutional neural networks. IEEE
Access, 8:42384–42403.
Lu, Y. and Young, S. (2020). A survey of public datasets for
computer vision tasks in precision agriculture. Com-
puters and Electronics in Agriculture, 178:105760.
Luo, J., Li, B., and Leung, C. (2023). A survey of com-
puter vision technologies in urban and controlled-
environment agriculture. ACM Computing Surveys,
56(5):1–39.
Paoletti, M. E., Haut, J. M., Plaza, J., and Plaza, A. J.
(2019). Deep learning classifiers for hyperspectral
imaging: A review. Isprs Journal of Photogramme-
try and Remote Sensing, 158:279–317.
Pinto Barrera, J., Rueda-Chac
´
on, H., Arguello, H., and
De, A. (2019). Classification of hass avocado (persea
americana mill) in terms of its ripening via hyperspec-
tral images. TecnoL
´
ogicas, 22:109–128.
Ram, B. G., Oduor, P., Igathinathane, C., Howatt, K., and
Sun, X. (2024). A systematic review of hyperspectral
imaging in precision agriculture: Analysis of its cur-
rent state and future prospects. Computers and Elec-
tronics in Agriculture, 222:109037.
Rizzo, M., Marcuzzo, M., Zangari, A., Gasparetto, A., and
Albarelli, A. (2023). Fruit ripeness classification: A
survey. Artificial Intelligence in Agriculture, 7:44–57.
Roy, S. K., Krishna, G., Dubey, S. R., and Chaudhuri, B. B.
(2020). Hybridsn: Exploring 3-d-2-d CNN feature hi-
erarchy for hyperspectral image classification. IEEE
Geosci. Remote. Sens. Lett., 17(2):277–281.
Varga, L. A., Frank, H., and Zell, A. (2023a). Self-
supervised pretraining for hyperspectral classification
of fruit ripeness. In 6th International Conference on
Optical Characterization of Materials, OCM 2023,
pages 97–108.
Varga, L. A., Makowski, J., and Zell, A. (2021). Measuring
the ripeness of fruit with hyperspectral imaging and
deep learning. In 2021 International Joint Conference
on Neural Networks (IJCNN), pages 1–8.
Varga, L. A., Messmer, M., Benbarka, N., and Zell, A.
(2023b). Wavelength-aware 2d convolutions for hy-
perspectral imaging. In 2023 IEEE/CVF Winter Con-
ference on Applications of Computer Vision (WACV),
pages 3777–3786.
Yang, X., Cao, W., Lu, Y., and Zhou, Y. (2022). Hyperspec-
tral image transformer classification networks. IEEE
Trans. Geosci. Remote. Sens., 60:1–15.
Zhu, H., Chu, B., Fan, Y., Tao, X., Yin, W., and He, Y.
(2017). Hyperspectral imaging for predicting the in-
ternal quality of kiwifruits based on variable selection
algorithms and chemometric models. Scientific Re-
ports, 7.
Fruit-HSNet: A Machine Learning Approach for Hyperspectral Image-Based Fruit Ripeness Prediction
111
