
Oasis: A Real-Time Hydraulic and Aeolian Erosion Simulation with
Dynamic Vegetation
Alexander Maximilian Nilles
a
, Lars G
¨
unther and Stefan M
¨
uller
Institute for Computational Visualistics, University of Koblenz, Universit
¨
atsstr. 1, Koblenz, Germany
{nillesmax, larsguenther98, stefanm}@uni-koblenz.de
Keywords:
Real-Time Simulation, Aeolian Erosion, Hydraulic Erosion, Vegetation Simulation, Desert, Sand Dune
Simulation, GPU, CUDA.
Abstract:
We present a novel real-time combined simulation for aeolian erosion, hydraulic erosion and vegetation, ca-
pable of transforming barren deserts with sand dunes into lush forest landscapes and vice versa using simple
user interaction. Existing aeolian and hydraulic erosion methods are extended and unified using a moisture
model on a layered heightmap, supporting bedrock, soil and sand as terrain materials. Vegetation uses a 3D
radius-based model and is efficiently rasterized to a 2D density map via a split-Gaussian model, inhibiting
erosion. Abiotic factors such as moisture, terrain slope, surface water and illumination are considered in veg-
etation growth and vegetation can spread radially as well as with the wind. Each plant considers the position
and size of all neighboring plants as a biotic growth factor, made possible through a set of uniform grids of
varying resolutions. The user can freely model different plant species by defining their ecological niche and
adaptability to changes in terrain elevation and competition with other plants. Even underwater vegetation is
possible. Interspecies competition can be defined freely using a competition matrix. The resulting method
runs in real-time at a terrain resolution of 2048
2
with 2,000,000.00 plants.
1 INTRODUCTION
Erosion processes play a key role in landscape forma-
tion, which is an important area of computer graph-
ics. Real-time erosion simulations on heightmaps ex-
ist for both hydraulic (water-based) erosion (Benes,
2007; Mei et al., 2007; Kri
ˇ
stof et al., 2009;
ˇ
St’ava
et al., 2008) and aeolian (wind-based) erosion (Taylor
and Keyser, 2023; Nilles et al., 2024a), however, to
the best of our knowledge, no method currently ex-
ists that combines hydraulic and aeolian erosion with
support for dune propagation in a single simulation.
Vegetation, which interacts bidirectionally with
terrain, is also important to landscapes. Plenty of re-
search in computer graphics has dealt with placing
large amounts of vegetation in a plausible or realis-
tic manner on existing landscapes. Some real-time
erosion simulations also consider the effects of veg-
etation on erosion, but do not simulate the vegeta-
tion itself, such as in (Hawkins and Ricks, 2023).
However, non-real-time methods combining erosion
and vegetation bidirectionally have been proposed be-
fore (Cordonnier et al., 2017). This method in partic-
a
https://orcid.org/0000-0002-4196-7424
ular, while interactive and powerful, requires almost
an entire minute for a simulation step at a low res-
olution. In the current time, higher resolutions are
usually required and long waiting periods for a poten-
tially undesired result from the viewpoint of an artist
are likely to cause such methods to be rejected in this
field.
In this paper, we propose a novel method that fills
both gaps. Our method combines aeolian and hy-
draulic erosion with a vegetation simulation. We sim-
ulate vegetation growth and spread while consider-
ing biotic and abiotic factors. All simulation compo-
nents affect each other bidirectionally, which is made
possible using a terrain moisture model and a split-
Gaussian rasterization of our novel radius-based veg-
etation model. Our method is fully interactive and the
user can change parameters to transform a desert into
a lush forest and vice versa, or create an oasis in a
desert. The method is capable of simulating a 2048
2
sized terrain with two million plants in real-time. It is
the first method in computer graphics that simulates
aeolian erosion, hydraulic erosion and vegetation in a
bidirectional manner in real-time at this scale. To fa-
cilitate reproduction of our results, the code is avail-
able open source (Nilles and G
¨
unther, 2025).
Nilles, A. M., Günther, L. and Müller, S.
Oasis: A Real-Time Hydraulic and Aeolian Erosion Simulation with Dynamic Vegetation.
DOI: 10.5220/0013112100003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 1: GRAPP, HUCAPP
and IVAPP, pages 39-52
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
39

Figure 1: A terrain initialized with low-frequency noise is transformed by a user by changing the rain strength. Initially, rain
is disabled, causing dune formation and aeolian bedrock abrasion. Adapted plants such as palm trees grow in the vicinity of
water sources and seaweed grows under water. The terrain is then flooded with heavy rain, causing strong hydraulic erosion.
Palm trees die in the process and only seaweed can grow, which transforms some sand to soil. Next, rain strength is reduced
significantly and most water evaporates. Sufficient moisture prevents saltation and allows for bushes to grow across the entire
scene, which transform sand to soil on a large scale. As soil is generated, trees can begin to grow in the new environment and
start to spread throughout the scene, forming forests. Finally, the user disables rain again. The terrain dries out, causing most
vegetation to die, returning to a desert. The entire process took roughly 15 minutes.
The remainder of this paper is structured as fol-
lows: In Section 2, we introduce relevant related
work. Next, Section 3 introduces our method in de-
tail, followed by our results in Section 4. We con-
clude with Section 5, discussing important directions
for future work and limitations.
2 RELATED WORK
In this section, we will briefly review related work
in computer graphics concerning aeolian erosion, hy-
draulic erosion, vegetation simulation and combined
methods, while focusing on real-time methods.
2.1 Aeolian Erosion
The Desertscape Simulation (Paris et al., 2019) was
the first method in computer graphics supporting dune
formation and bedrock abrasion in desert environ-
ments. Barchans, linear dunes, star-shaped dunes and
nabhka dunes are supported and vegetation is con-
sidered via a density map. The simulation is inter-
active, but not real-time. It has since been imple-
mented in real-time on the GPU (Taylor and Keyser,
2023; Nilles et al., 2024a). (Taylor and Keyser, 2023)
added echo dune support and compared their results
with wind tunnel experiments (Tsoar, 1983) and an
accurate offline method (L
¨
u et al., 2018). In (Nilles
et al., 2024a), the method was further optimized for
the GPU using CUDA and made deterministic. A
new reptation method produces results closer to the
reference method in (L
¨
u et al., 2018). The imple-
mentation has since been expanded with divergence-
free wind fields and improved reptation (Nilles and
G
¨
unther, 2024).
2.2 Hydraulic Erosion
Multiple real-time hydraulic erosion methods
emerged since 2007. (Benes, 2007) used the shallow
water equations. Water destroys the terrain and
forms grit (regolith), simulated as a high viscosity
fluid. (Mei et al., 2007) instead use the virtual pipes
method (O’Brien and Hodgins, 1995), paired with
a capacity-based dissolution/deposition model. In
(
ˇ
St’ava et al., 2008), the virtual pipes method and ero-
sion model from (Mei et al., 2007) are combined with
the shallow water grit simulation from (Benes, 2007).
The method is generalized to multiple different
material layers with varying erosion resistance and
materials age over time. (Kri
ˇ
stof et al., 2009) used
a 3D smoothed particle hydrodynamics simulation
and perform particle-based erosion on a heightmap
instead. (Hawkins and Ricks, 2023) extended (
ˇ
St’ava
et al., 2008) with vegetation, modeled as an addi-
tional layer that can die as a result of erosion, forming
another layer which can be transported similar to
sediment. Vegetation reduces the impact of erosion.
However, there is no simulation of vegetation growth
and spread. Recently, (Nilles et al., 2024b) extended
the approach of (Mei et al., 2007) to 3D using
multi-layered heightmaps. Their method is capable
of generating arches, overhangs and limited caves in
real-time.
2.3 Vegetation Simulation
We focus on methods that only consider plant po-
sition, size and type (radius-based methods) instead
of methods simulating detailed growth of individual
plants. An early real-time method considers abiotic
factors such as elevation and slope, which is paired
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
40

with noise functions for procedural vegetation place-
ment via an ecosystem probability (Hammes, 2001).
This was extended by (Ch’ng, 2011), which introduce
biotic factors for a more realistic placement of plants.
The Field of Neighborhood (FON) method introduced
in (Berger et al., 2002) uses a circular zone of influ-
ence around each plant, modeling plant competition
that results in growth reduction of neighboring plants.
This was further developed by (Alsweis and Deussen,
2006; Weier et al., 2013), where pregenerated tiles
are used for real-time performance. EcoBrush (Gain
et al., 2017) instead draws interpolated samples from
a database to synthesize a full ecosystem quickly with
interactive control by the user.
A new framework for real-time procedural plant
distribution on large-scale terrains was developed in
(do Nascimento et al., 2018). They consider abiotic
and biotic factors and allow the user to define plant
types via a set of parameters describing their adapt-
ability, which resembles our approach. Vegetation is
organized in a quadtree, where vegetation only af-
fects plants in layers below it. Moisture is procedu-
rally computed from a wide range of parameters us-
ing influence curves. Plant overlap is avoided using
distance fields instead of directly checking plants for
collisions.
Ecoclimates (Pałubicki et al., 2022) is the state-
of-the-art in realism for outdoor landscapes with veg-
etation. The bidirectional relationship between veg-
etation and weather is modeled by combining a 3D
weather simulation, a soil model and a vegetation
model, simulating the entire water cycle. The sim-
ulation is not real-time, but interactive. It is the first
method that captures forest edge effects, Foehn and
spatial vegetation patterning.
2.4 Combined Methods
(Cordonnier et al., 2017) combined erosion simu-
lation and vegetation simulation with bidirectional
feedback, which is also the goal of our method. Their
method uses a layered heightmap terrain representa-
tion and an event-based framework. Geomorpholog-
ical events include rainfall, running water, tempera-
ture, lightning, gravity and fire. Ecosystem events
deal with soil moisture, evapotranspiration, illumi-
nation and temperature, which define the vigor and
stress of plants, resulting in germination, growth or
death and the generation of humus (dark organic
matter in soil). Notably, aeolian erosion or dune
formation are not supported. The event-based na-
ture is ill-suited to the GPU, and their CPU imple-
mentation scales poorly with resolution, requiring
roughly 10× as long when the number of cells is
quadrupled. A simulation step at 1024
2
resolution re-
quires 38s. Recently, (Hartley et al., 2024) general-
ized erosion on various terrain representations, rang-
ing from heightmaps over multi-layered heightmaps
to 3D voxels, using particles as erosion agents. The
framework can be used for a variety of erosion effects,
such as hydraulic erosion, aeolian erosion and ther-
mal erosion, reproducing the Desertscape Simulation
results from (Paris et al., 2019) to some extent.
3 OUR METHOD
This section will explain our method in detail. The
core components of the simulation are vegetation sim-
ulation, aeolian erosion and hydraulic erosion. A
high-level overview of how these components are
linked together can be found in Figure 2. Aeolian ero-
sion has been adapted from the real-time desertscapes
simulation in (Nilles et al., 2024a) and our implemen-
tation directly extends their code (Nilles and G
¨
unther,
2024). For hydraulic erosion, we have taken ideas
from earlier as well as recent work (Mei et al., 2007;
ˇ
St’ava et al., 2008; Nilles et al., 2024b). Our vegeta-
tion model is a modified radius-based model that we
designed specifically for our erosion simulation.
3.1 Overview
The terrain consists of a 2D grid of N
x
× N
y
cells.
Each cell i
i
i is square with a side length of l
c
, set to 1m
for all scenes in this paper. The cells form a layered
heightmap, containing bedrock T
B
, soil T
e
, sand T
s
and water T
w
in that order. Uppercase indicates abso-
lute quantities and lowercase relative quantities, i.e.
T
W,i
i
i
= T
B,i
i
i
+ T
e,i
i
i
+ T
s,i
i
i
+ T
w,i
i
i
(1)
is the absolute water height of cell i
i
i. We define a veg-
etation height T
v
, which is relative to the sand height
and overlaps with the water layer. The absolute vege-
tation height is calculated as
T
V,i
i
i
= T
B,i
i
i
+ T
e,i
i
i
+ T
s,i
i
i
+ T
v,i
i
i
(2)
and is used for shadow calculation. The 3D position
of the terrain surface is defined as
x
x
x
i
i
i
=
l
c
·
i
i
i
x
+
1
2
, T
S,i
i
i
, l
c
·
i
i
i
y
+
1
2
T
(3)
Each cell has a 2D wind velocity w
w
w
i
i
i
, calculated
from a high-altitude wind velocity w
w
w
a
, and a 2D water
velocity u
u
u
i
i
i
.
The different components of our simulation inter-
act via an absolute terrain moisture level T
M
, modeled
up to a depth of 1m. The moisture capacity T
M
c
is
T
M
c
,i
i
i
= c
M
· min(T
e,i
i
i
+ T
s,i
i
i
, 1), (4)
Oasis: A Real-Time Hydraulic and Aeolian Erosion Simulation with Dynamic Vegetation
41
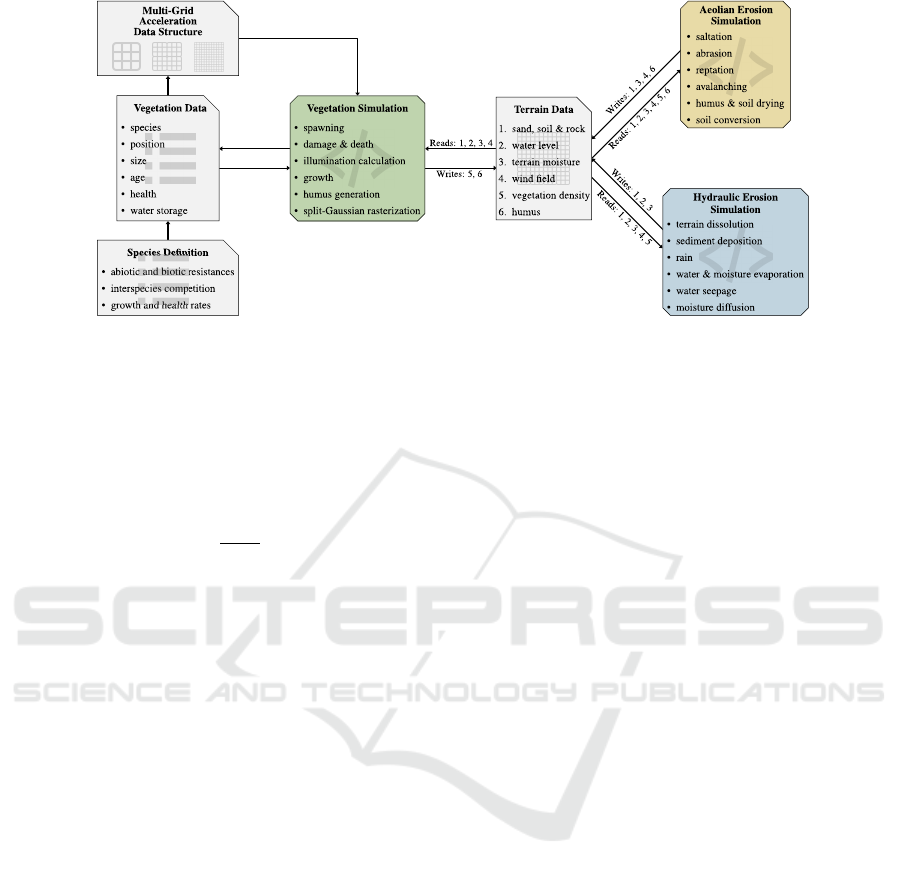
Figure 2: A high-level overview of our method. Terrain data is stored in a 2D grid which serves as the common interface
of vegetation simulation, aeolian erosion and hydraulic erosion, which read and modify the terrain data. This enables bidi-
rectional feedback between the three simulations. The vegetation data is stored as an array, which is only directly read and
modified by the vegetation simulation. Neighborhood queries for plant competition are accelerated via our multi-grid data
structure. The erosion simulations access the vegetation information via a vegetation density map, which is rasterized from
the actual vegetation using our split-Gaussian model.
where c
M
is a moisture capacity constant, typically set
to 1. The relative moisture is defined as
T
m,i
i
i
=
T
M,i
i
i
T
M
c
,i
i
i
. (5)
Moisture is used for plant growth and affects aeolian
erosion and the angle of repose of soil and sand.
The aeolian erosion simulation from (Nilles et al.,
2024a) requires a vegetation density T
V
∈ [0, 1] for
each cell. Instead of using a static vegetation density,
we create the vegetation density map dynamically in
each simulation step, based on the current 3D posi-
tions and sizes of the plants in the scene. It impacts
the angle of repose and aeolian erosion, which we ex-
tend to impact hydraulic erosion and moisture evapo-
ration.
Lastly, aeolian and hydraulic erosion processes
turn soil into sand. We use vegetation to make this
reversible via a humus layer T
h,i
i
i
. This layer does not
contribute to the terrain height. It is generated by veg-
etation, decays if there is no moisture present and oth-
erwise slowly transforms sand into soil.
3.2 Vegetation Model
We use a custom radius-based vegetation model tai-
lored to our use case. It is not directly based on pre-
vious work and intentionally simple. More advanced
ideas from related work could be integrated later to
improve our model.
Each plant k has a 3D position V
x
x
x,k
, radius V
r,k
,
health V
h,k
, water storage V
w,k
, age V
a,k
and
species S
k
. S
j
is the set of all plants that belong to
species j. The species S
k
∈ N of a plant determines
how it is adapted to different environmental factors,
how fast it grows, matures and withers, as well as
the maximum radius and how the stem height and
root depth relate to its radius. A competition ma-
trix D
D
D encodes interspecies competition, where each
entry d
i j
∈ [0, ∞) defines how much species j reduces
the growth of species i. This can be used to model
species that can coexist easily, compete equally for
resources, or to model an invasive species that com-
pletely dominates another.
Table 1 lists the 26 parameters defining a species
and whether they affect growth, health or the
spawning of new vegetation. We will explain the
most important parameters in detail and refer to
vegetation.cu in the source code for further infor-
mation.
The age of each plant is incremented by ∆t ev-
ery time step and a plant is considered mature if it
has reached the maturity percentage of its maximum
radius in the maturity time. Only mature plants can
reproduce and plants that fail to reach maturity are
removed. Water resistance is used to differentiate
underwater plants from regular plants. A resistance
of 100% indicates a species that only grows under wa-
ter.
The vegetation simulation is structured as follows:
First, vegetation is rasterized into multiple 2D grids
(Section 3.2.1), which bidirectionally links it to the
erosion simulations and is used when spawning new
vegetation (Section 3.2.2). Spawning of new vege-
tation depends on the local and windward density of
each species, as well as compatibility with the envi-
ronment. Next, a two-layered illumination map is cal-
culated using the terrain elevation and rasterized veg-
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
42
Table 1: The parameters of a species. A cross marks
whether they affect growth (G), health (H) or spawning of
new vegetation (S). Indirect effects are marked with paren-
thesis.
Parameter G H S
Maximum radius r
max
× × (×)
Growth rate φ
g
× ×
Position adjust rate φ
p
(×)
Damage rate φ
d
×
Shrink rate φ
s
(×)
Maturity time × ×
Maturity percentage × ×
Relative stem height h
s
(×) (×) (×)
Relative root depth h
r
(×) (×) (×)
Water usage rate φ
w
× ×
Water capacity w
c
× ×
Water resistance × × ×
Minimum moisture ×
Maximum moisture × ×
Soil compatibility × ×
Sand compatibility × ×
Maximum stem coverage ×
Minimum root coverage ×
Maximum slope × × ×
Base spawn probability p
b
×
Density spawn multiplier p
ρ
×
Wind spawn multiplier p
W
×
Humus generation rate φ
h
Minimum illumination × ×
Maximum illumination × ×
Density separation ρ
s
×
etation heights (Section 3.2.3), which is used as an
abiotic growth factor as well as for visualization. We
then calculate the growth of each plant (Section 3.2.4)
depending on the local abiotic and biotic (plant com-
petition) factors. Plants that are unable to grow due
to incompatibility with the environment receive dam-
age, potentially dying, and plants that were unable to
mature in time are culled (Section 3.2.5). Lastly, the
acceleration data structure for neighborhood lookups
is updated (Section 3.2.6).
3.2.1 Rasterizing Vegetation
Our terrain simulation interacts with vegetation in-
directly using the vegetation density map T
V
. This
needs to be rasterized from the current population of
plants in every simulation step. We describe the den-
sity of a single plant using a split 3D Gaussian, with µ
set to the position of the plant and diagonal covariance
matrix Σ(x
x
x, k), set to 4V
2
r,k
horizontally. Vertically,
4(h
s,k
·V
r,k
)
2
is used for positions above the plant, and
4(h
r,k
· V
r,k
)
2
below it.
Figure 3: An illustration of our vegetation density model
in 2D for a plant with shallow roots and high stem. The
Gaussian vegetation density is shown in green.
The density of plant k at 3D position x
x
x is
ρ(x
x
x, k) = e
−
1
2
(x
x
x−V
x
x
x,k
)
T
Σ(x
x
x,k)
−1
(x
x
x−V
x
x
x,k
)
. (6)
We further modify this to ensure that the density is 0 if
the distance in the 2D plane is equivalent to the radius,
which is necessary for our acceleration data structure:
¯
ρ(x
x
x, k) = max
ρ(x
x
x, k) −
e
−2
∥x
x
x − V
x
x
x,k
∥
xz
V
r,k
, 0
. (7)
This is evaluated at the terrain surface x
x
x
i
i
i
, which al-
lows us to properly consider height changes in terrain.
If a plant is partially buried under terrain or has its
roots exposed, it will have a lower density. The split
model allows us to describe plants that do not grow
spherically and to specify root depth separately from
height. Figures 3 and 4 illustrate this density model.
The rasterized vegetation density is defined as
T
V ,i
i
i
= min
∑
k
¯
ρ(x
x
x
i
i
i
, k), 1
!
. (8)
We additionally rasterize the per-species vegetation
density T
V ,i
i
i, j
by restricting the sum in Equation (8) to
a given species j, which is used when spawning new
plants, alongside a directional per-species vegetation
density which takes the wind direction into account:
T
W ,i
i
i, j
=
∑
k∈S
j
ρ
W
(i
i
i, k) ·
1 −
∥x
x
x
i
i
i
− V
x
x
x,k
∥
r
max, j
, (9)
ρ
W
(i
i
i, k) = max
w
w
w
i
i
i
∥w
w
w
i
i
i
∥
·
x
x
x
i
i
i
− V
x
x
x,k
∥x
x
x
i
i
i
− V
x
x
x,k
∥
, 0
. (10)
T
V ,i
i
i, j
and T
W ,i
i
i, j
only consider plants that have
reached maturity, which can reproduce.
Vegetation height is rasterized as
T
v,i
i
i
= max
k
(V
r,k
· h
s,k
·
¯
ρ(x
x
x
i
i
i
, k)) , (11)
Oasis: A Real-Time Hydraulic and Aeolian Erosion Simulation with Dynamic Vegetation
43

Figure 4: We visualize the rasterized vegetation density in
green. Damage was disabled, allowing plants to survive if
uprooted or buried. As the terrain changes, vegetation den-
sity adjusts, changing smoothly depending on the distance
to the terrain surface from the plant origin. Plants that are
buried deep or floating high do not contribute to density.
and the humus map is updated for the next time step
by adding the humus generated by each plant k based
on its humus generation rate φ
h,k
T
t+∆t
h,i
i
i
= T
t
h,i
i
i
+ ∆t ·
∑
k
φ
h,k
·
¯
ρ(x
x
x
i
i
i
, k). (12)
3.2.2 Spawning Vegetation
In each simulation step, new vegetation can spawn in
any given cell. The species of a spawning plant is
determined using a per species weight
p(i
i
i, j) = p
b, j
· (1 + p
ρ, j
min(T
V ,i
i
i, j
, 1)
+ p
W , j
min(T
W ,i
i
i, j
, 1))
. (13)
In order to avoid vegetation spawning in incompatible
environmental conditions, we reduce the weight of a
species to 0 in those situations. Table 1 shows which
environmental factors we consider. For example, if a
species has a water resistance of 25%, we check the
water level in the cell. If the water level exceeds 25%
of the stem height, the species cannot spawn in this
cell. A species with 100% water resistance is instead
considered to be an underwater plant, which can only
spawn and survive under water.
Furthermore, the density separation parameter ρ
s, j
of a species is used as a threshold. If the per-species
density is larger than this, we set the weight to 0 to
avoid plants spawning too close to each other.
The probability of a vegetation spawn event per
cell and simulation step depends on the sum p
sum
(i
i
i)
of the per species weights per cell, as well as the total
amount of cells and the time step. As each cell can
only contain a single plant at the same time, we con-
sider
p
sum
(i
i
i)
N
x
N
y
to be the probability of at least one plant
spawning in the cell over the course of 1 second. This
means that the vegetation spawn event has to happen
with probability
p
spawn
(i
i
i) = 1 −
1 − min
p
sum
(i
i
i)
N
x
N
y
, 1
∆t
. (14)
If a vegetation spawn event is triggered, the species of
the plant is then selected randomly based on the per
species weights.
Figure 5: Left image: two types of bushes grow in a scene.
One type cannot grow in direct sunlight or strong shadow
and competes with trees, growing only on the shaded side of
a hill and the outer edge of the tree shadow. The other type
has no competition with trees and requires strong shade, so
it grows underneath trees. A closeup is shown in the right
image. The left half of the image is rendered using our vol-
umetric shadow map, the right half has this disabled.
Plants spawn fully healthy with age 0 and no
stored water. Their initial radius is set to 5% of the
maximum possible radius, calculated as
r
max
(i
i
i, j) = min
T
s,i
i
i
+ T
e,i
i
i
h
r, j
, r
max, j
. (15)
This considers the root depth of a plant and avoids
plant growth into the bedrock layer.
3.2.3 Illumination
Light is one of the most important growth factors for
plants. Instead of modeling a full day and night cy-
cle with constantly changing shadows and light di-
rection, we model the average illumination through-
out the day. Our approach is motivated from ambient
occlusion, where we introduce a directional bias to-
ward a dominant light direction, usually south. We
compute two illumination values per cell, one for the
ground level and one for the vegetation level. These
can then be interpolated for a given intermediate po-
sition. Figure 5 demonstrates the capabilities of this
model.
Given a cell offset o
o
o, we calculate the upward tan-
gens angle to the cell at that offset from a given cell i
i
i
at the two elevation levels:
α
α
α(i
i
i, o
o
o) =
1
l
c
∥o
o
o∥
max(T
V,i
i
i−o
o
o
− T
S,i
i
i
, 0)
max(T
V,i
i
i−o
o
o
− T
V,i
i
i
, 0)
(16)
and a weight considering light direction l
l
l and distance
d(i
i
i, o
o
o) = −2
max(l
c
(o
o
o · l
l
l), 0)
∥l
c
· o
o
o∥
2
. (17)
Illumination values are then calculated using a 7 × 7
neighborhood by averaging an exponential function:
σ
σ
σ(i
i
i) =
∑
o
o
o∈{−3...3}
2
2
49
e
d(i
i
i,o
o
o)·α
α
α
x
(i
i
i,o
o
o)
e
d(i
i
i,o
o
o)·α
α
α
y
(i
i
i,o
o
o)
− 1. (18)
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
44

The reason for multiplying by 2 and subtracting 1 is
that half of the samples evaluate to 1, so the illumina-
tion value would be in [0.5, 1] without this.
Using Equation (18), we can compute the illumi-
nation at height y via linear interpolation
σ(i
i
i, y) = (1 − t)σ
σ
σ
x
(i
i
i) +tσ
σ
σ
y
(i
i
i), where (19)
t =
y − T
S,i
i
i
T
V,i
i
i
− T
S,i
i
i
. (20)
For underwater plants, we additionally apply an ex-
ponential decay of illumination with water depth.
3.2.4 Vegetation Growth
The rate at which a plant grows is determined by mul-
tiple growth factors g
i
: Competition with surround-
ing plants g
c
∈ [0, 1], illumination g
I
∈ [0, 1], terrain
slope g
s
∈ [0, 1], water availability g
m
∈ [1, 2], stand-
ing water g
w
∈ [0, 1] and ground composition g
g
∈
[0, 1].
These growth factors are determined based on the
current environment and the species-specific param-
eters in Table 1. Further effects such as temperature
are left for future work. We use a simplified model
compared to the piece-wise linear hat-like functions
used for plant response in (Cordonnier et al., 2017)
and other previous work.
For illumination, each species has an interval of
compatible illumination values. The illumination
level is determined by evaluating Equation (19) at the
top of the plant and g
I
is interpolated based on the
position in the valid interval, where the interval bor-
ders map to 0 and the center of the interval maps to 1.
For example, if the interval is [0.5,1.5], the associ-
ated species starts growing under medium illumina-
tion and growth increases up to the maximum illumi-
nation level of 1. The interval [−0.5, 0.5] describes a
species that only grows in the shade and grows best
at 0 illumination.
The growth factors g
s
and g
w
work similarly, the
only difference is that the species determines the right
end of the interval, which maps to no growth, while
flat terrain and absence of standing water lead to the
best growth for these factors. Underwater plants ig-
nore g
w
.
Ground composition works differently. It is in-
tended to model nutrients as well as the ability of the
plant’s roots to grow in hard and soft materials. The
sand and soil compatibility of the species are multi-
plied with the percentage of roots covered by that type
of ground and added up. Consequently, the growth
factor g
g
decreases if the roots are partially exposed
to air. A plant that has 0 compatibility with sand will
thus not grow if the ground entirely consists of sand.
Competition is calculated based on all surround-
ing plants as
g
c,k
= 1 −
∑
i,i̸=k
1
4
· d
S
k
S
i
·
min(∥V
x
x
x,i
− V
x
x
x,k
∥ − (V
r,k
+ V
r,i
), 0)
V
r,k
2
. (21)
This roughly approximates how much the radii of two
plants overlap, weighted with the competition rela-
tionship between their associated species. A plant that
spawns in a region with high competition will grow
slowly and potentially not reach maturity.
Lastly, we compute a growth factor for
water availability. Using the volume of the
roots V
r,k
=
2
3
πh
r,k
V
3
r,k
, stem V
s,k
=
2
3
πh
s,k
V
3
r,k
and entire plant V
k
= V
r,k
+V
s,k
, we determine water
capacity, required water and available ground water
as
W
cap
(k) = w
c,k
·V
k
(22)
W
req
(k) = ∆t · φ
w
·V
s,k
(23)
W
avail
(k) = ∆t · T
M,i
i
i
·V
r,k
(24)
If W
avail
< W
req
, the remaining water is taken from the
plants own storage V
w
, otherwise, the plant can in-
crease its water storage with superfluous ground wa-
ter, up to W
cap
. The required water models both water
used by the plant’s cells and water loss due to transpi-
ration. The growth factor g
m
is 1 if W
req
(k) is satisfied
and increases up to 2 if there is an excess of water.
Aside from growth, competition and illumination
also impact the maximum radius of a plant, caus-
ing plants to be smaller in the presence of competi-
tion and bad lightning conditions. The maximum ra-
dius ¯r
max
(k) is further limited by the distance to the
bedrock, similar to Equation (15). It is calculated as
min
(V
x
x
x,k
)
y
− T
B,i
i
i
h
r,k
, g
c,k
· g
I,k
· r
max,k
. (25)
For underwater plants, we additionally consider the
distance to the water surface as a limit.
The plant radius is updated as
V
t+∆t
r,k
= V
t
r,k
+ ∆t · φ
g
·
∏
i
g
i,k
. (26)
If the maximum radius is exceeded, growth is set to 0.
3.2.5 Vegetation Health
The purpose of our vegetation health model is to cull
plants that are no longer able to survive after the envi-
ronmental conditions have changed. A plant receives
damage if its radius is larger than 110% of the current
maximum radius and if the water requirement can-
not be satisfied. It is also damaged if illumination is
Oasis: A Real-Time Hydraulic and Aeolian Erosion Simulation with Dynamic Vegetation
45

outside the compatible interval and if relative ground
moisture or terrain slope exceed a threshold. Lastly,
it is damaged if too much of the plant is underground,
exposed to air or standing water.
Each of these factors results in a damage value d
i
,
which is 0 at the border of the allowed range and
grows larger the further the conditions deviate from
allowed values. If any of these damage values ex-
ceeds 0, the plant cannot grow. The health of a plant
is updated using
V
t+∆t
h,k
= V
t
h,k
+ ∆t
φ
g
·
∏
i
g
i,k
− φ
d
∑
i
d
i,k
!
. (27)
A plant can thus recover its health as it grows. The
maximum health is 1 and if the health reaches 0, the
plant dies and is removed. Plants that fail the maturity
condition have their health set to 0.
Some species are able to shrink, which can be con-
trolled with the shrink rate φ
s
and only happens if
a plant’s radius exceeds the current maximum by at
least 10%. Similarly, some plants can adjust their po-
sition up or down toward the current ground surface,
which is set via the species parameter φ
p
. Plants that
can shrink or adjust their position are able to adapt
better to changing environments, avoiding damage.
3.2.6 Acceleration Data Structure
Our vegetation model needs to iterate over all plants
in the scene at various points, which is not possible
in real-time for large plant populations. However, the
influence of a plant is 0 if it is far enough away. For
the different rasterized quantities, the influence radius
of a plant is equivalent to its radius V
r,k
. The influ-
ence for the competition calculation g
c,k
depends on
the sum of the radius V
r,k
and the radius of the other
plant.
We thus need a suitable acceleration data structure
for neighborhood lookups. Uniform grids are a good
candidate because they are very efficient to create in
parallel on the GPU. Their resolution has to be chosen
to be optimal for a fixed search radius, but the plants
in our scene have radii varying from 0 to 20m. This
leads to very poor performance in situations where
large and small plants coexist.
Our solution to this problem is to use multiple uni-
form grids at the same time. Each grid covers a dif-
ferent range of radii. We use 4 different scales, with
the respective radii being 0−2.5m, 2.5−5m, 5−10m
and 10 − 20m. The cell size of each uniform grid is
twice the upper bound. Each plant belongs to exactly
one of these grids, which is selected based on its ra-
dius. For rasterization of plant quantities, we only
need to iterate over the plants in 2 × 2 cells of each
uniform grid. Note that our approach is different from
the quadtree used in (do Nascimento et al., 2018), as
we use the data structure solely for a neighborhood
search, whereas the quadtree in the previous work is
used for plant interaction and plants in the same layer
do not interact with each other, only affecting the lay-
ers below them. In our case, all plants interact with
each other.
Competition is more expensive to calculate than
rasterization. When computing the competition of a
small plant, only a few cells in each grid have to be
considered. Large plants have to iterate over a big
area in the higher resolution grids. Our data struc-
ture is thus less optimal for competition calculation.
As there are usually far fewer large plants than small
plants and many more terrain cells than plants in a
scene, rasterization performance was the more impor-
tant factor.
Each uniform grid is allocated densely, so using
multiple grids increases memory. This is negligi-
ble because each successive grid has a significantly
smaller resolution. The time required to create mul-
tiple uniform grids is almost equivalent to creating a
single grid in our implementation. In order to achieve
this, we first calculate a key for each plant, where the
grid index is encoded in the most significant bits and
the least significant bits are set to the cell index inside
that grid. We then sort the plants by their keys using
radix sort. A single kernel with one thread per plant
then compares keys of neighboring plants in order to
sparsely fill all uniform grids at once with the respec-
tive start and end indices into the list of plants.
3.3 Aeolian Erosion
Our method directly extends the code of (Nilles et al.,
2024a), so we refer to the original work for exact de-
tails. The object map and echo dunes implementation
proposed by (Taylor and Keyser, 2023) was removed,
as it was not important to our use case. We will give
a brief overview of the method and then highlight the
key changes we made to it.
3.3.1 Overview
The method by (Nilles et al., 2024a) is an enhanced
real-time implementation of (Paris et al., 2019) using
CUDA. It is limited to desertscapes environments and
capable of simulating dune formation and propaga-
tion. Only a bedrock and sand layer are used in the
method and there is no concept of moisture or water.
Vegetation is supported using a static density map that
is unaffected by changes in elevation during the simu-
lation. A simulation step consists of wind field calcu-
lation, wind shadow calculation, saltation, sand de-
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
46

position/bouncing, abrasion, reptation and avalanch-
ing.
Wind field calculation takes a time-varying high
altitude wind direction w
w
w
a
and outputs the 2D wind
field w
w
w
i
i
i
. This is done by first scaling wind strength
with terrain height (venturi effects) and then warp-
ing the wind direction using the gradient of a set of
Gaussian convolutions of the terrain, which was im-
plemented efficiently with cuFFT. Since the original
paper in (Nilles et al., 2024a), this has been extended
by creating a divergence-free wind field via pressure
projection in the frequency domain, which is sched-
uled to be published after the submission of our pa-
per (Nilles and G
¨
unther, 2024).
Wind shadow calculation traces backward against
the wind direction for each cell and finds the steep-
est angle up to a maximum distance. This angle de-
termines a wind shadow value in [0, 1]. Angles be-
low 10
◦
cause no shadow, angles above 15
◦
cause full
shadow.
Saltation is the lifting of sand by the wind, as
well as the advection of lifted sand. The amount
of sand that is lifted depends on the vegetation den-
sity T
V
and wind shadow, which protect from salta-
tion. Advection was originally done using a forward
scheme with atomics, but the divergence-free wind
field added later allows for semi-Lagrangian advec-
tion that steps backward in the wind direction while
conserving mass.
Sand deposition and bouncing happen as part of
saltation. After advection, a percentage of lifted sand
is deposited, while the remaining sand is considered
to have bounced on the terrain and remains lifted to be
advected in the next simulation step. The deposition
probability increases with wind shadow and vegeta-
tion density and is also affected by the ground mate-
rial.
Bedrock abrasion to sand happens due to sand that
bounces on bare bedrock. The strength can be set
by the user and is affected by wind speed, vegetation
density and bedrock abrasion resistance.
Reptation describes movements of sand on the
terrain triggered by sand particles colliding with the
ground. (Nilles et al., 2024a) proposed a new method
to support this effect which suffered from some arti-
facts. The current implementation uses an improved
version that implements reptation by adaptively re-
ducing the angle of repose based on the amount of de-
posited and bounced sand (Nilles and G
¨
unther, 2024).
Avalanching refers to the stabilization of sand
slopes toward the angle of repose, set to 33
◦
with no
vegetation and 45
◦
at full vegetation density. This is
implemented using an iterative algorithm. Many iter-
ations are necessary for scenes with strong saltation.
A single avalanching iteration per simulation step is
applied to the bedrock layer, using an angle of 68
◦
.
3.3.2 Our Changes
As our vegetation model rasterizes the vegetation den-
sity T
V
needed for aeolian erosion, no further changes
were necessary to support it. We extended the original
method with an additional material layer (soil), which
is fairly straightforward. The soil layer is avalanched
with one iteration per frame, using angles 45
◦
without
vegetation and 68
◦
at full vegetation density.
Similar to bedrock, soil can be abraded due to
saltation, with a separate strength that can be set
by the user. Soil abrasion additionally depends on
moisture by interpolating the strength to 0 as T
m,i
i
i
reaches 50%. If moisture is below a threshold m
dry
(2% by default), soil slowly dries out and is trans-
formed into sand:
∆T
e,i
i
i
= φ
dry
∆t · (1 − T
V ,i
i
i
)
· max(1 −
T
m,i
i
i
m
dry
, 0) · e
−10·T
s,i
i
i
,
(28)
where φ
dry
= 0.01 is the dry erosion rate. Vegetation
protects from this and dry erosion strength is reduced
by the thickness of the sand above the soil. Equa-
tion (28) is also subtracted from the humus layer T
h,i
i
i
.
Sand can transform back into soil using a combi-
nation of vegetation, humus and moisture, making the
previous processes reversible:
∆T
s,i
i
i
= φ
humus
· ∆t · T
V ,i
i
i
· T
m,i
i
i
, (29)
where φ
humus
= 0.01 is the humus conversion rate.
The humus layer decreases by Equation (29) in the
process.
Lastly, we consider the water layer and moisture
throughout the saltation, deposition and avalanching
process. Sand lifting and abrasion are disabled un-
der water. Additionally, sand can only be lifted if the
relative moisture is below 10%, reaching full strength
at 0%. In order to avoid sand piling up around bodies
of water, the deposition probability is clamped to 1%
in cells with standing water and decreases with mois-
ture, reaching 1% of the original values at 10% rela-
tive moisture. We slightly increase the angle of repose
of soil and sand, reaching a peak at 50% moisture, at
which point the angle of repose drastically decreases
to almost 0
◦
at 100%. This models grit/regolith, caus-
ing the terrain to smooth out under and around water.
3.4 Hydraulic Erosion
We combine several ideas from previous work in our
method (Mei et al., 2007;
ˇ
St’ava et al., 2008; Nilles
Oasis: A Real-Time Hydraulic and Aeolian Erosion Simulation with Dynamic Vegetation
47

Figure 6: Strong waves erode the terrain and sediment is washed ashore as sand, forming a beach. After the wave strength is
reduced, the sand that is further inland begins to dry out and is eventually transported away by the wind (last image).
et al., 2024b). The water layer is simulated using
the virtual pipes method, with the GPU implemen-
tation proposed in (Mei et al., 2007). Hydraulic
erosion largely follows the capacity-based dissolu-
tion/deposition model from (Mei et al., 2007), ex-
tended to multiple layers as in (
ˇ
St’ava et al., 2008).
3.4.1 Overview
Sediment capacity depends on terrain slope and wa-
ter velocity as in previous work. We additionally de-
crease the capacity with increasing water depth, as
proposed in (Nilles et al., 2024b). This is done be-
cause the water velocity calculated in the virtual pipes
model describes the surface, while erosion happens at
the bottom of each water column. Furthermore, the
previous work does not use vegetation. We reduce the
capacity to 50% with increasing vegetation density.
Sand, soil and bedrock can be dissolved into sedi-
ment, which works via user-defined strengths per ma-
terial as in the previous work. The deposition of sed-
iment as sand has been modified to account for vege-
tation and happens at twice the rate at 100% vegeta-
tion density. In (Mei et al., 2007), semi-Lagrangian
advection was used for sediment due to its sim-
plicity and ease of implementation with GPU tex-
ture fetches. We instead use forward advection with
atomic adds, because the water velocity field from the
virtual pipes method is not divergence-free, causing
semi-Lagrangian advection to not conserve mass.
In (
ˇ
St’ava et al., 2008), the authors additionally
simulate a regolith layer using the shallow water
equations. (Nilles et al., 2024b) simplified this effect
by modifying the angle of repose with water depth. In
our implementation, this effect is instead controlled
by the terrain moisture as described previously.
3.4.2 Waves
We modify the virtual pipes method such that the
wind field from aeolian erosion can interact with it,
generating waves. A sine function is used to create a
time-varying wave strength that depends on the wind:
f
w
w
w
(i
i
i) = ∥w
w
w
i
i
i
∥ · c
wave
· max(sin(φ
wave
·t), 0) (30)
with wave period φ
wave
and wave strength c
wave
. We
apply exponential decay based on water depth, where
wave strength decreases to 0 with decreasing depth.
This force is then applied to the outflow flux in the
virtual pipes method, using the dot product between
outflow direction and wind direction.
3.4.3 Rain and Water Sources
The user can specify a minimum and maximum rain
probability p
min
rain
, p
max
rain
, which are interpolated be-
tween based on height, where the maximum is used
at a height h
max
rain
set by the user:
p
rain
(i
i
i) = p
min
rain
+ (p
max
rain
− p
min
rain
) ·
T
W,i
i
i
h
max
rain
. (31)
This probability functions as a threshold for a noise
function η(i
i
i,t) ∈ [0, 1]. The user can control the time
and space frequencies of this noise function. If the
noise value is less than or equal to the rain probability
in a cell, we add ∆t · φ
rain
to the water level.
A minimum water level can be set for the cells on
the border of the terrain, or all cells in the scene. This
will prevent the water level T
W
from decreasing below
that point and can be used to create oceans or lakes.
3.4.4 Water Seepage and Moisture Diffusion
Surface water in our simulation slowly seeps into the
ground, turning into ground moisture. Sand and soil
have different seepage rates φ
s
M
, φ
e
M
. The combined
seepage rate is determined based on the composition
of the terrain up to a depth of 1m as
φ
M
(i
i
i) = φ
e
M
+ (φ
s
M
− φ
e
M
) · min(T
s,i
i
i
, 1). (32)
This rate is multiplied by 0.02 if the relative ground
moisture is above 50%. If the absolute moisture ex-
ceeds the current capacity T
M
c
,i
i
i
, the excess moisture
is emitted as surface water. Otherwise, water seeps
into the ground:
∆T
M,i
i
i
= min(φ
M
(i
i
i) · (T
M
c
,i
i
i
− T
M,i
i
i
), T
w,i
i
i
), (33)
which is subtracted from the water layer and added to
the absolute moisture.
We then apply diffusion to the moisture map, us-
ing a single forward iteration of a standard grid-based
diffusion algorithm.
3.4.5 Evaporation
(Mei et al., 2007) implemented evaporation as a per-
centage loss per time step, which behaves inconsistent
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
48
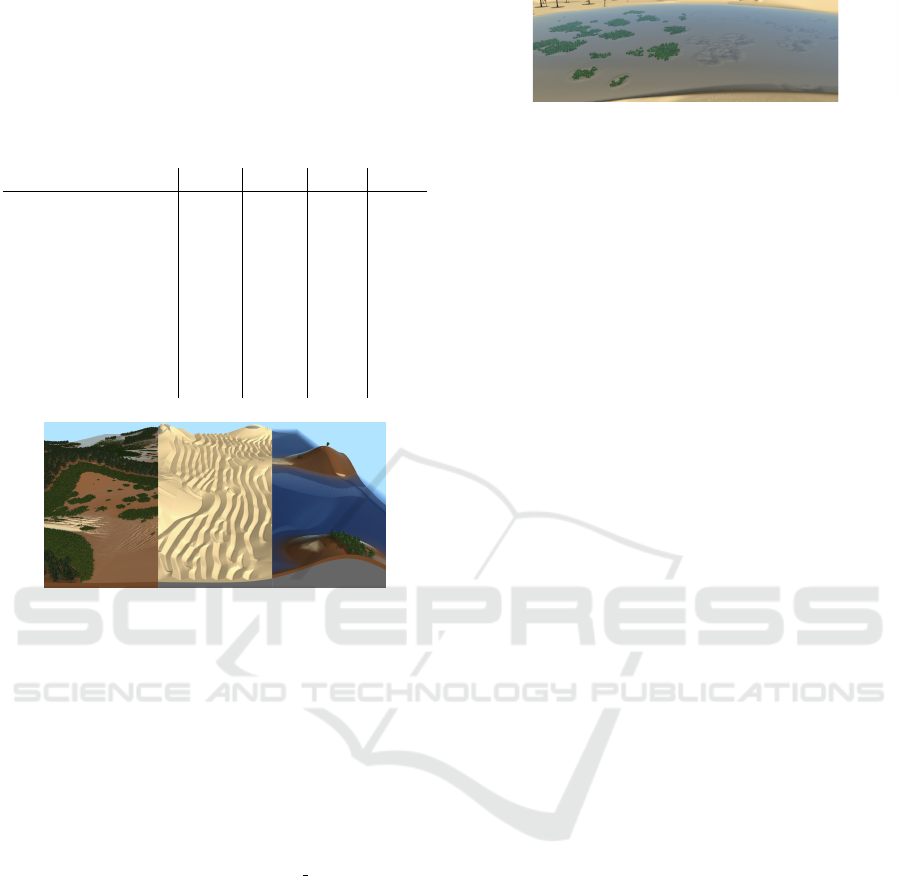
Table 2: Timings in ms of our simulation at 2048
2
resolu-
tion, with a total of 0.25, 0.5, 1 and 2 million plants. Includ-
ing visualization, the required GPU memory was 1.6GB for
the smallest and 1.8GB for the largest scene. The rows show
timings for the full method and select components. In each
scene, large trees are combined with small bushes that have
no competition and can grow in the shade of trees, which is
particularly challenging for our datastructure.
250k 500k 1m 2m
Full Simulation 16.5 17.5 19.2 23.4
◦ Aeolian 11.7 11.7 11.7 11.6
◦ Sand Aval. 7.6 7.6 7.5 7.4
◦ Hydraulic 2.4 2.4 2.4 2.4
◦ Vegetation 2.4 3.3 5.1 9.3
◦ Data Structure 0.8 1.1 1.6 2.6
◦ Growth 0.7 1.2 2.1 4.6
◦ Raster 0.6 0.8 1.1 1.8
◦ Shadowmap 0.3 0.3 0.3 0.3
Figure 7: From left to right: wetlands, deserts and islands
in an ocean, showcasing possible environments.
with different time steps. We instead use exponential
decay as in (Nilles et al., 2024b):
T
t+∆t
w,i
i
i
= T
t
w,i
i
i
· e
−φ
evap
w
·∆t
, (34)
where φ
evap
is the user-specified evaporation rate.
A separate rate can be specified for ground mois-
ture evaporation, which additionally depends on the
ground material (see Equation (32)) and is reduced
by vegetation:
T
t+∆t
M,i
i
i
= T
t
M,i
i
i
· e
−φ
evap
M
·φ
M
(i
i
i)·∆t·(1−
3
4
T
V ,i
i
i
)
. (35)
Evaporation of moisture can only happen if no surface
water is present in a cell.
4 RESULTS
We include two videos that show our results in the
supplementary material, recorded directly during sim-
ulation with a simple real-time renderer.
Our method allows to seamlessly transition be-
tween aeolian erosion with dune formation and hy-
draulic erosion by varying rain, water sources and
evaporation parameters during the simulation, form-
ing a unified real-time erosion framework, made pos-
sible due to the addition of our ground moisture
Figure 8: Plants protect against hydraulic erosion and en-
courage sediment deposition, demonstrated here with un-
derwater plants. Mounds form around plants, similarly to
nabhka dunes. The right half has vegetation hidden.
model. Using a noise function with a threshold for
rain allows for different parts of the scene to be af-
fected by either type of erosion at the same time. This
can be further controlled by varying the rain proba-
bility with terrain height, allowing the user to restrict
rain to mountains or valleys. We are thus able to sup-
port a wide range of scenes, ranging from completely
dry deserts to wetlands and even islands in an ocean
environment (see Figure 7). Parameters can be ad-
justed on the fly by the user, enabling transformation
of a desert into a lush forest or an underwater environ-
ment and back.
By introducing waves due to wind to the hydraulic
erosion simulation, it is possible to create beaches,
demonstrated in Figure 6. Strong waves erode the ter-
rain and wash sand ashore. If the wave strength is re-
duced, sand that has been washed further inland does
not receive enough moisture from the water anymore,
causing it to be transported away by the wind due to
aeolian erosion if there is no rain.
The dynamic vegetation model proposed by us
improves upon the original static vegetation density
model used for aeolian erosion (Paris et al., 2019).
All shortcomings of the original approach as men-
tioned in (Nilles et al., 2024a) have been addressed,
the vegetation density now appropriately changes as
vegetation is buried or uncovered by sand due to our
3D split-Gaussian model (see Figure 4) which is ras-
terized to a vegetation density in each simulation step.
Additionally, the ideas from (Paris et al., 2019) gen-
eralized well to hydraulic erosion, allowing for the
equivalent of a nabhka dune forming under water
(see Figure 8).
Our vegetation model is coupled bidirectionally to
the erosion simulation. Plants lessen the impact of
erosion and are able to transform landscapes eroded
to just sand back into earthen environments. This in
turn affects vegetation growth, allowing for different
species to grow as the terrain is transformed. The pro-
cess is very flexible, as the user can freely design the
different vegetation species. While there are a total
of 26 parameters that define a species, the parameters
are intuitive since most of them directly relate to the
conditions they can survive in. To achieve the scene
in Figure 1, a total of 4 species were created. Palm
Oasis: A Real-Time Hydraulic and Aeolian Erosion Simulation with Dynamic Vegetation
49

trees were configured to be resilient to being cov-
ered by terrain due to their leaves being placed very
high up, were set to require low amounts of water and
moisture, as well as a preference for sand. This results
in palm trees spawning in a desert environment next
to water sources, forming an Oasis. Seaweed was set
up as an underwater plant and begins to fill the scene
as the terrain is flooded, transforming sand to soil in
the process. After reducing the amount of rain signifi-
cantly, water bodies evaporate again, causing exposed
seaweed to wither. The low amount of rain seeps into
the ground as moisture instead of accumulating as sur-
face water, enabling the growth of bushes across the
entire scene which require more water and moisture.
As the bushes transform sand into soil, trees that re-
quire soil can eventually spawn and displace bushes
due to competition, forming forests as they spread
in the wind direction. Disabling rain causes another
mass extinction event and slowly returns the scene to
a desert as soil dries out and is abraded by aeolian
erosion.
The volumetric illumination model proposed by
us is very efficient to calculate and enables us to fur-
ther diversify the possible plant species. Combined
with the competition model, we can create plants that
only grow in the shade of larger plants or plants that
only grow in the shaded areas of the terrain, but not
in the presence of another species. Together with
the other environmental parameters, it is possible to
have a wide variety of species in the same scene
that each inhabit their own ecological niche (see Fig-
ure 5). We additionally make use of our illumina-
tion model while visualizing the simulation, which
enhances depth perception and replaces traditional
shadow mapping and ambient occlusion techniques
for free.
We evaluate the performance of our simulation on
a RTX 4080 GPU at a terrain resolution of 2048
2
with
varying number of plants (see Table 2). For each mea-
surement, we imposed an upper limit on the number
of plants, waited until the number of plants reached
this maximum and averaged the next 10,000.00 simu-
lation steps. The scene contains large trees combined
with small bushes that are set to grow in the shade
of larger trees with no competition. This mixture of
densely placed, overlapping plants with high size dif-
ference is particularly demanding, which is why we
chose it to test performance.
The performance of aeolian and hydraulic erosion
is unaffected by the number of plants, with aeolian
erosion requiring about 11.7ms per simulation step.
Hydraulic erosion is very fast at only 2.4ms. Aeo-
lian erosion is more demanding as it involves multiple
fourier transformations, but the main reason is sand
avalanching as in previous work (Nilles et al., 2024a).
We used 50 sand avalanching iterations per simulation
step, requiring around 7.5ms. This many iterations are
only necessary in parts of the scene where dunes are
forming, which was not the case in our scene. An
adaptive approach would thus be very beneficial.
Vegetation computation time grows slower rela-
tive to the number of plants. At two million plants, it
requires 9.3ms per simulation step, bringing the to-
tal method to 23.4ms which is still real-time. The
shadow map creation is independent of the number
of plants and only takes 0.3ms. Vegetation growth is
the most expensive and the only part that grows faster
relative to the number of plants at vegetation count
above one million, requiring 4.6ms for two million
plants, followed by data structure creation with 2.6ms
and vegetation rasterization with 1.8ms. This is ex-
pected as the data structure was optimized for rasteri-
zation. Increasing the number of plants much further
would quickly become limited by vegetation growth
calculation with our current data structure, indicating
that even more plants are possible in real-time if this
is improved.
5 CONCLUSION AND FUTURE
WORK
In conclusion, we successfully integrated aeolian ero-
sion, hydraulic erosion, and vegetation simulation
into a single method capable of real-time performance
at resolutions of 2048
2
with two million plants, made
possible by our acceleration data structure. The dif-
ferent components were tied together by adding a
ground moisture level and our split-Gaussian vege-
tation density rasterization. Our vegetation model
supports multiple plant species, including underwa-
ter vegetation, which can be configured alongside
other parameters like rain and water sources. Each
species is defined by simple parameters based on en-
vironmental compatibility, paired with a basic volu-
metric illumination calculation. It is possible to in-
teractively transform between entirely different envi-
ronments, such as deserts, underwater landscapes and
lush forests, while observing changes in real-time.
For future work, we would like to further improve
the vegetation data structure to allow for even larger
numbers of plants in real-time. Additionally, the sand
avalanching step from aeolian erosion still has a high
cost, as in the previous work. Performance could
be increased by adaptively reducing the number of
avalanching steps used, as only dry deserts require
many iterations. Alternatively, it would be worth in-
vestigating a machine learning solution to avalanch-
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
50

ing. A neural network could be trained by using
the current avalanching implementation to produce a
ground truth.
We have not yet incorporated temperature into our
simulation, which is another important factor for veg-
etation growth. In order to support the full range
of real-world temperatures, we would like to com-
bine this with snow and ice simulations, potentially
accounting for thermal erosion. In particular, the
aeolian erosion framework seems well-suited to be
adapted for snow dune simulation. Using real-world
elevation and weather data or alternatively, a full
weather simulation are other avenues worth explor-
ing. In a similar manner, further weather effects such
as lightning strikes, as well as forest fires as imple-
mented in (Cordonnier et al., 2017) are not yet con-
sidered.
Another limitation of our model is the high num-
ber of parameters, which make interaction more com-
plex for an artist in the current state. As pointed out
by a reviewer, we think that further work should iden-
tify meaningful presets and organize parameters into
main parameters as well as less important ones for
fine-tuning. Another possibility would be developing
a set of more intuitive meta-parameters that control
the current parameters behind the scenes.
Lastly, there is a wide array of research available
with more realistic vegetation models. As our ex-
pertise is in erosion simulations and our goal was to
combine multiple different simulations into a single
real-time implementation, we chose to leave this ad-
ditional complexity out and developed our own sim-
ple method, allowing us to freely design the vegeta-
tion model to suit the needs of the erosion simulation.
Incorporating the state of the art in vegetation simula-
tions is thus left for future work.
ACKNOWLEDGEMENTS
The textures and meshes used for trees, bushes and
seaweed are from Sketchfab users (evan4129, 2024;
OwenCalingasan, 2024) and licensed as CC BY
4.0 (Creative Commons, 2024).
REFERENCES
Alsweis, M. and Deussen, O. (2006). Wang-tiles for the
simulation and visualization of plant competition. In
Nishita, T., Peng, Q., and Seidel, H.-P., editors, Ad-
vances in Computer Graphics, pages 1–11, Berlin,
Heidelberg. Springer Berlin Heidelberg.
Benes, B. (2007). Real-Time Erosion Using Shallow Water
Simulation. In Dingliana, J. and Ganovelli, F., editors,
Workshop in Virtual Reality Interactions and Physi-
cal Simulation ”VRIPHYS” (2007). The Eurographics
Association.
Berger, U., Hildenbrandt, H., and Grimm, V. (2002). To-
wards a standard for the individual-based modeling
of plant populations: self-thinning and the field-of-
neighborhood approach. Natural Resource Modeling,
15(1):39–54.
Ch’ng, E. (2011). Realistic placement of plants for virtual
environments. IEEE Computer Graphics and Appli-
cations, 31(4):66–77.
Cordonnier, G., Galin, E., Gain, J., Benes, B., Gu
´
erin, E.,
Peytavie, A., and Cani, M.-P. (2017). Authoring land-
scapes by combining ecosystem and terrain erosion
simulation. ACM Trans. Graph., 36(4).
Creative Commons (2024). CC BY 4.0 Attribution 4.0 In-
ternational. https://creativecommons.org/licenses/by/
4.0/.
do Nascimento, B. T., Franzin, F. P., and Pozzer, C. T.
(2018). Gpu-based real-time procedural distribution
of vegetation on large-scale virtual terrains. In 2018
17th Brazilian Symposium on Computer Games and
Digital Entertainment (SBGames), pages 157–15709.
evan4129 (2024). LOD/Billboard Summer Trees Pack,
Trees and bush Pack LOWPOLY, Palm Tree Pack
LOWPOLY. https://sketchfab.com/evan4129.
Gain, J., Long, H., Cordonnier, G., and Cani, M.-P. (2017).
Ecobrush: Interactive control of visually consistent
large-scale ecosystems. Computer Graphics Forum,
36(2):63–73.
Hammes, J. (2001). Modeling of ecosystems as a data
source for real-time terrain rendering. In Westort,
C. Y., editor, Digital Earth Moving, pages 98–111,
Berlin, Heidelberg. Springer Berlin Heidelberg.
Hartley, M., Mellado, N., Fiorio, C., and Faraj, N. (2024).
Flexible terrain erosion. The Visual Computer.
Hawkins, B. and Ricks, B. (2023). Improving virtual
pipes model of hydraulic and thermal erosion with
vegetation considerations. The Visual Computer,
39(7):2835–2846.
Kri
ˇ
stof, P., Bene
ˇ
s, B., K
ˇ
riv
´
anek, J., and
ˇ
St’ava, O. (2009).
Hydraulic erosion using smoothed particle hydrody-
namics. Computer Graphics Forum, 28(2):219–228.
L
¨
u, P., Dong, Z., and Rozier, O. (2018). The Combined
Effect of Sediment Availability and Wind Regime on
the Morphology of Aeolian Sand Dunes. Journal of
Geophysical Research: Earth Surface, 123(11):2878–
2886.
Mei, X., Decaudin, P., and Hu, B.-G. (2007). Fast Hydraulic
Erosion Simulation and Visualization on GPU. In 15th
Pacific Conference on Computer Graphics and Appli-
cations (PG’07), pages 47–56.
Nilles, A. M. and G
¨
unther, L. (2024). CUDA
Dune Simulation. https://github.com/Clocktown/
CUDA-Dune-Simulation.
Nilles, A. M. and G
¨
unther, L. (2025). Oasis. https://github.
com/Clocktown/Oasis/tree/GRAPP2025.
Nilles, A. M., G
¨
unther, L., and M
¨
uller, S. (2024a). Real-
Time Desertscapes Simulation with CUDA. In Pro-
ceedings of the 19th International Joint Conference
Oasis: A Real-Time Hydraulic and Aeolian Erosion Simulation with Dynamic Vegetation
51

on Computer Vision, Imaging and Computer Graphics
Theory and Applications - Volume 1: GRAPP, pages
34–45. INSTICC, SciTePress.
Nilles, A. M., G
¨
unther, L., Wagner, T., and M
¨
uller, S.
(2024b). 3D Real-Time Hydraulic Erosion Simula-
tion using Multi-Layered Heightmaps. In Linsen, L.
and Thies, J., editors, Vision, Modeling, and Visual-
ization. The Eurographics Association.
O’Brien, J. and Hodgins, J. (1995). Dynamic simulation
of splashing fluids. In Proceedings Computer Anima-
tion’95, pages 198–205.
OwenCalingasan (2024). Seaweed. https://sketchfab.com/
OwenCalingasan.
Pałubicki, W., Makowski, M., Gajda, W., H
¨
adrich, T.,
Michels, D. L., and Pirk, S. (2022). Ecoclimates:
climate-response modeling of vegetation. ACM Trans.
Graph., 41(4).
Paris, A., Peytavie, A., Gu
´
erin, E., Argudo, O., and Galin,
E. (2019). Desertscape Simulation. Computer Graph-
ics Forum, 38(7):47–55.
Taylor, B. and Keyser, J. (2023). Real-Time Sand Dune
Simulation. Proc. ACM Comput. Graph. Interact.
Tech., 6(1).
Tsoar, H. (1983). Wind Tunnel Modeling of Echo and
Climbing Dunes. In Brookfield, M. and Ahlbrandt, T.,
editors, Eolian Sediments and Processes, volume 38
of Developments in Sedimentology, pages 247–259.
Elsevier.
ˇ
St’ava, O., Bene
ˇ
s, B., Brisbin, M., and K
ˇ
riv
´
anek, J.
(2008). Interactive terrain modeling using hydraulic
erosion. In Proceedings of the 2008 ACM SIG-
GRAPH/Eurographics Symposium on Computer An-
imation, SCA ’08, page 201–210, Goslar, DEU. Eu-
rographics Association.
Weier, M., Hinkenjann, A., Demme, G., and Slusallek, P.
(2013). Generating and rendering large scale tiled
plant populations. 10(1).
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
52
