
Optimizing Object Detection for Maritime Search and Rescue:
Progressive Fine-Tuning of YOLOv9 with Real and Synthetic Data
Luciano Lima
1
, Fabio Andrade
1
, Youcef Djenouri
1
, Carlos Pfeiffer
2
and Marcos Moura
1
1
University of South-Eastern Norway, Vestfold, Norway
2
University of South-Eastern Norway, Porsgrunn, Norway
Keywords:
UAV, Transfer Learning, YOLOv9, Synthetic Data.
Abstract:
The use of unmanned aerial vehicles for search and rescue (SAR) brings a series of advantages and reduces the
time required to find survivors. It is possible to use computer vision algorithms to automate person detection,
enabling a faster response from the rescue team. A major challenge in training image detection systems is the
availability of data. In the SAR context, it can be more challenging as datasets are scarce. A possible solution
is to use a virtual environment to generate synthetic data, which can provide an almost unlimited amount
of data already labeled. In this work, the use of real and synthetic data for training the model YOLOv9t in
maritime search and rescue operations is explored. Different proportions of real data were used for training a
model from the scratch and for transfer learning by fine-tuning the model after being pretrained with synthetic
data generated in Unreal Engine 4, to evaluate the performance aiming to reduce the reliance on real-world
datasets. The total amounts of real and synthetic data were kept the same to ensure fair comparison. Fine-
tuning a model pretrained on synthetic data with just 10% real data improved performance by 13.7% compared
to using real data alone. An important finding is that the best performance was achieved with 70‘% real data
instead a model trained solely on 100‘% real data. These results show that combining synthetic and real data
enhances detection accuracy while reducing the need for large real-world datasets.
1 INTRODUCTION
In Search and Rescue (SAR) missions performed in
a maritime environment, the large area to be swept
results in a high demand for personnel and a long du-
ration to complete the mission. The rapid advance
of technology enables artificial intelligence capabil-
ities in small computers that can be embedded in
unmanned aerial vehicles (UAV). While in regular
search and rescue operations, the sweep is conducted
by the crew of aircraft over the estimated location
of distress (IAMSAR, 2022), the use of a swarm of
drones can reduce both the time and cost of this op-
eration. A key factor in a SAR mission is the time to
reach to the survivors(Tu
´
snio and Wr
´
oblewski, 2022),
what is related to reducing the time to detect the vic-
tim. A crucial stage of the UAV search effort is
to recognize survivors among the debris in the sea.
The ability to recognize images, as with any other
machine learning technique, is highly dependent on
a set of training images representing the target sce-
nario (G
´
eron, 2017). The efforts to acquire images
of a search and rescue scenario at sea are challenging
since it requires the mobilization of people, money,
and vehicles. The use of images generated in a virtual
environment with high visual fidelity can be a game-
changer in training and improving the performance
of survivor detection algorithms. In (Dabbiru et al.,
2023), the Keras-RetinaNet framework was used to
process synthetic aerial images generated in a sim-
ulated environment for building detection, showing
promising results. In (Lima et al., 2023), the use of
YOLOv8 in synthetic and real datasets was evaluated
with the aim of validating the use of synthetic data
to replace real-world data in training an object detec-
tion algorithm. However, the results showed that the
presence of synthetic data reduced the system’s accu-
racy, with no clear explanation for this. In the present
work, the goal is to further develop this research us-
ing the best model containing synthetic data to find
the optimal balance between synthetic and real im-
ages. The research developed in (Krump and St
¨
utz,
2021) analyzes vehicle recognition using both real
and synthetic images to determine which image de-
scriptors have a higher influence on detection systems
across both domains. Focusing in a better understand-
Lima, L., Andrade, F., Djenouri, Y., Pfeiffer, C. and Moura, M.
Optimizing Object Detection for Maritime Search and Rescue: Progressive Fine-Tuning of YOLOv9 with Real and Synthetic Data.
DOI: 10.5220/0013112700003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 3, pages 209-216
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
209

ing of the reality gap, which is the difference between
real and synthetic data characteristics, this study also
identifies which image descriptors most significantly
impact the generation of false positives when using
YOLOv3. In (Jayalath and Munasinghe, 2021), a
drone with an embedded image recognition system
developed with Fast RCNN is used for SAR missions.
A Raspberry Pi(Upton and Halfacree, 2014) was used
for local computation on the drone. The scenario
takes place over varied terrain, where an autonomous
path planning system was developed to enable the
drone to fly towards a suspicious target and send bet-
ter images to an operator for confirming the presence
of humans. The demand for customized datasets has
already benefited from the advent of diffusion mod-
els. The use of text-to-image diffusion models to cre-
ate image datasets with synthetic data was presented
in (Xing and Tzes, 2023). YOLOv7 was employed to
detect the presence of drones in various images.
2 BACKGROUND AND RELATED
WORK
During a SAR operation at sea, the area to be swept
is divided into a grid of cells, each with an assigned
probability of containing survivors. This probability
is assigned by the rescue center of operation, tak-
ing into consideration various factors such as mar-
itime currents, winds, distress location, time of the
incident, and the latest information available about
the vehicle(IAMSAR, 2022). These probabilities can
also be assigned using software like SAROPS (Search
and Rescue Optimal Planning System). This software
estimates the position of the victims using Bayesian
Search Theory and is currently the software used by
the U.S. Coast Guard(Kratzke et al., 2010). Once the
rescue team has this initial probability map, the path
for their aircraft and ships is determined by taking
this information into account. One of the advantages
of using drones for the search is the fast response
and the ability for real-time communication and co-
ordination using data from software without requir-
ing voice communication, as needed in crewed air-
craft. The image recognition performed by the drone
needs to be fast and reliable. Due to the need to em-
bed the software in a flying vehicle, the weight of
processing systems and batteries on the UAV directly
impacts the propulsion systems, reducing flight en-
durance. This restriction limits the processing power
available for image recognition, demanding an object
detection solution that balances good performance
with lightweight hardware.
Training data plays a key role in the performance
of a model(G
´
eron, 2017). However, considering that
SAR operations prioritize victim care and rescue ef-
forts, it is challenging to acquire data during a real
mission. The availability of data for training these
systems is a challenge. Despite the existence of some
datasets applicable to SAR at sea, the amount of data
is generally a factor that can contribute to improv-
ing system performance. The use of synthetic data
can overcome these limitations, providing theoreti-
cally infinite data since it is software-generated. Ac-
cording to (Bird et al., 2020), researchers argue that
the use of transfer learning can increase the capabil-
ity of a model to perform complex tasks after being
initially trained on simulations.
In the work developed in (Lima et al., 2023),
the training of YOLOv8 was evaluated for different
amounts of real and synthetic data using different
transfer learning approaches. The strategy of trans-
fer learning used was fine-tuning and freezing layers.
From the results, the best model using synthetic data
was the one trained first on synthetic data, followed
by fine-tuning on real data. It is important to consider
that synthetic data can be easily expanded, compared
to real-world data, which typically requires significant
efforts to acquire. In this context, favoring the use of
synthetic data over real data is particularly advanta-
geous.
3 METHODOLOGY
This work will address the question of finding the best
balance of real data for fine-tuning a model trained
on synthetic data. Different proportions of real and
synthetic data will be used for training the model and
evaluating the best performance.
3.1 The Model
YOLOv9 is a cutting-edge real-time object detector
released in 2024 (Wang and Liao, 2024). It belongs
to a series of detection models named YOLO, which
stands for ”You Only Look Once,” first released in
(Redmon et al., 2016). The biggest advantage of
YOLOv9 is its capability to perform various tasks
such as object detection, segmentation, pose estima-
tion, oriented detection, and classification with fast
performance even on less powerful systems. The
model is available in versions with different numbers
of parameters, named with the last letter represent-
ing the complexity and consequently the hardware
requirements. These versions for object detection
are YOLOv9t, YOLOv9s, YOLOv9m, YOLOv9c,
and YOLOv9e, respectively representing tiny, small,
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
210
medium, large, and extensive sizes. In search areas
over the sea, the availability of reliable communica-
tion is not common, so a cloud processing approach
with high bandwidth demand would not be deploy-
able(Jayalath and Munasinghe, 2021). Considering
that drones will need to process all the information
internally, YOLOv9t was used considering the perfor-
mance limitation of embedded systems on UAVs once
in a real application the processing power will also be
used for different tasks like path-planning, communi-
cation management among others.
Different amounts of real-world data will be used
during the fine-tuning of the model pre-trained exclu-
sively on synthetic data. The main objective is to find
the optimal amount of real data for fine-tuning, which
provides the model with proper generalization for de-
tecting survivors in real-life situations.
The total amount of real data available is 10,736.
The model will be fine-tuned with 10, 20, 30, 50, 70,
and 100 percent of the real data. Each fine-tuning pro-
cess will be performed directly on the original model
trained on synthetic data. The process will not be
done sequentially over the same model; for example,
a model fine-tuned on 10 percent of data will not be
submitted for a new process with 20 percent to create
a 30 percent model.
3.2 Datasets and Experimental Setup
3.2.1 SeaDronesSee
SeadronesSee - It is a dataset focused on search and
rescue operations using unmanned aerial vehicles in
maritime scenarios. Developed by the University of
T
¨
ubingen, it includes sets of tracks for object detec-
tion, single-object tracking, and multi-object tracking
(Varga et al., 2021). The images also come with meta-
data such as altitude, camera angle, field of view, etc.
The dataset used in this work is Object Detection v2,
which contains a total of 10,477 images. These im-
ages are distributed among training, validation, and
testing sets, aimed at an evaluation leaderboard man-
aged by the researchers who developed the dataset.
The annotation format is compatible with the COCO
dataset (Lin et al., 2015), a widely used image dataset.
3.2.2 Synthetic
Synthetic – This dataset was generated using Unreal
Engine 4 (Games, ) with the Environment Project
add-on (DotCam et al., 2022). It features a cus-
tomizable sea environment where characteristics such
as wave direction, size, and frequency can be easily
modified. Additionally, it includes configurable sky
settings and buoyancy configurations for objects and
Figure 1: Image from SeaDronesSee.
characters on the sea. Utilizing these features, a dis-
tress sea scenario was created and automatically an-
notated, producing images and bounding boxes used
as ground truth for object detection models. Devel-
oped by undergraduate students from the University
of South-Eastern Norway (Pettersvold et al., 2023),
the dataset contains 9,500 labeled images. These im-
ages are captured in a virtual environment by a UAV
flying over characters, objects, and boats on the sea.
The virtual environment is set with a clear sky, calm
sea, and good weather, mirroring the scenario of the
SeadronesSee dataset. Annotations are formatted in
YOLOv5 PyTorch TXT (Ultralytics, 2022).
Figure 2: Synthetic image acquired on Unreal 5 simulation.
3.3 Training, Validation and Testing
Split
Initially, the annotations of the real-world dataset
were converted to the format YOLOv5 PyTorch.
Three types of models were generated. The first type
is a model trained with all the synthetic data available.
The second type are models trained with just real data,
in different quantities as will be explained further be-
low. And the third type are models trained with all
synthetic data and afterwards refined using transfer
Optimizing Object Detection for Maritime Search and Rescue: Progressive Fine-Tuning of YOLOv9 with Real and Synthetic Data
211

learning through fine-tuning technique over the same
quantities of real world data used for the second type.
The initial validation during the training process
of the synthetic data will be performed in the real
data aiming to guide the system to generalize over
the target data. During the fine-tuning process, the
validation will be done over a different subset of im-
ages from the real dataset. Therefore, the real-world
dataset images were divided into 4 subsets as shown
in Figure 3.
Figure 3: Dataset division.
Where in synthetic data:
• Train - Data for training during the pre-
training process.
And the real data division is done as:
• Train - Data used on training or fine-tuning
process.
• Val. Synthetic - Data for validation during the
pre-training with synthetic dataset.
• Val. Real - Data for validation during the
training or fine-tuning process.
• Test - Data used for the final test phase for
comparing the models.
The training and validation amounts of data were
kept the same for the synthetic and the real datasets,
allowing for a good comparison and an easy under-
standing of the mixed proportions used in the tests.
Therefore, a proportion of 10% of real data in a
transfer learning model indicates that 736 real im-
ages were used for fine-tuning a model pre-trained
on 7,363 synthetic images. The optimizer was set
to automatic, with a learning rate and momentum set
by the YOLOv9 algorithm. The training process and
the fine-tuning process were both set to 80 epochs.
The starting weights for the model were randomly as-
signed. To maintain reproducibility, a seed of 42 was
chosen for training and fine-tuning the model.
4 RESULTS
The models were evaluated using mAP (mean average
precision)(Everingham et al., 2014) as the main met-
ric. It was chosen because it balances precision and
recall, considering both false positives and false nega-
tives, and also because it is the benchmark metric used
for computer vision(V7Labs, 2022). This metric cal-
culates the accuracy for object detection systems mea-
suring the precision and recall based on the bounding
boxes predicted by the model and the bounding boxes
provided as ground-truth.
The mAP 50-95, commonly used as the bench-
mark in computer vision models, measures the mean
average precision for IoU (intersection over union) of
bounding box overlap thresholds ranging from 0.5 to
0.95. Since the main concern of this research is to de-
tect the presence of survivors in the sea , rather than
their exact position within the image, bounding box
precision is not as important as detection accuracy.
A high overlap requirement may result in more false
negatives, which is critical to avoid in search and res-
cue efforts(Qingqing et al., 2020). Therefore, the av-
erage precision at an IoU threshold of 0.5 (mAP50)
will be used as the primary metric in this work.
To facilitate the visualization due to the number
of lines, the training graphs were divided into two.
These data shows the mAP50 considering the train-
ing using images of Human and Boat. Figure 4 rep-
resents the graphs for the training of 10%, 20%, 30%
and pure synthetic while the Figure 5 represents the
graphs for the training of 50%, 70%, 100% and pure
synthetic. The same color was used for each percent-
age with the dark one representing the fine-tuning us-
ing synthetic data and the light one representing the
model trained with the real data from the scratch.
Figure 4: Training curve for 10%, 20%, 30% and synthetic.
In Table 1, the performance of the model for both
classes Boat and Human(named as ”All”) is shown for
different amounts of real data used for training and
for transfer learning. The column ”Real” indicates
the performance when using only real data, while the
column ”TF Synth” indicates the values when using
a specific percentage of real data for transfer learn-
ing after the training was completed with the whole
amount of synthetic data. The column named ”Incre-
ment” indicates the improvement in the model’s de-
tection performance achieved by using synthetic data
compared to the use of just real data.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
212
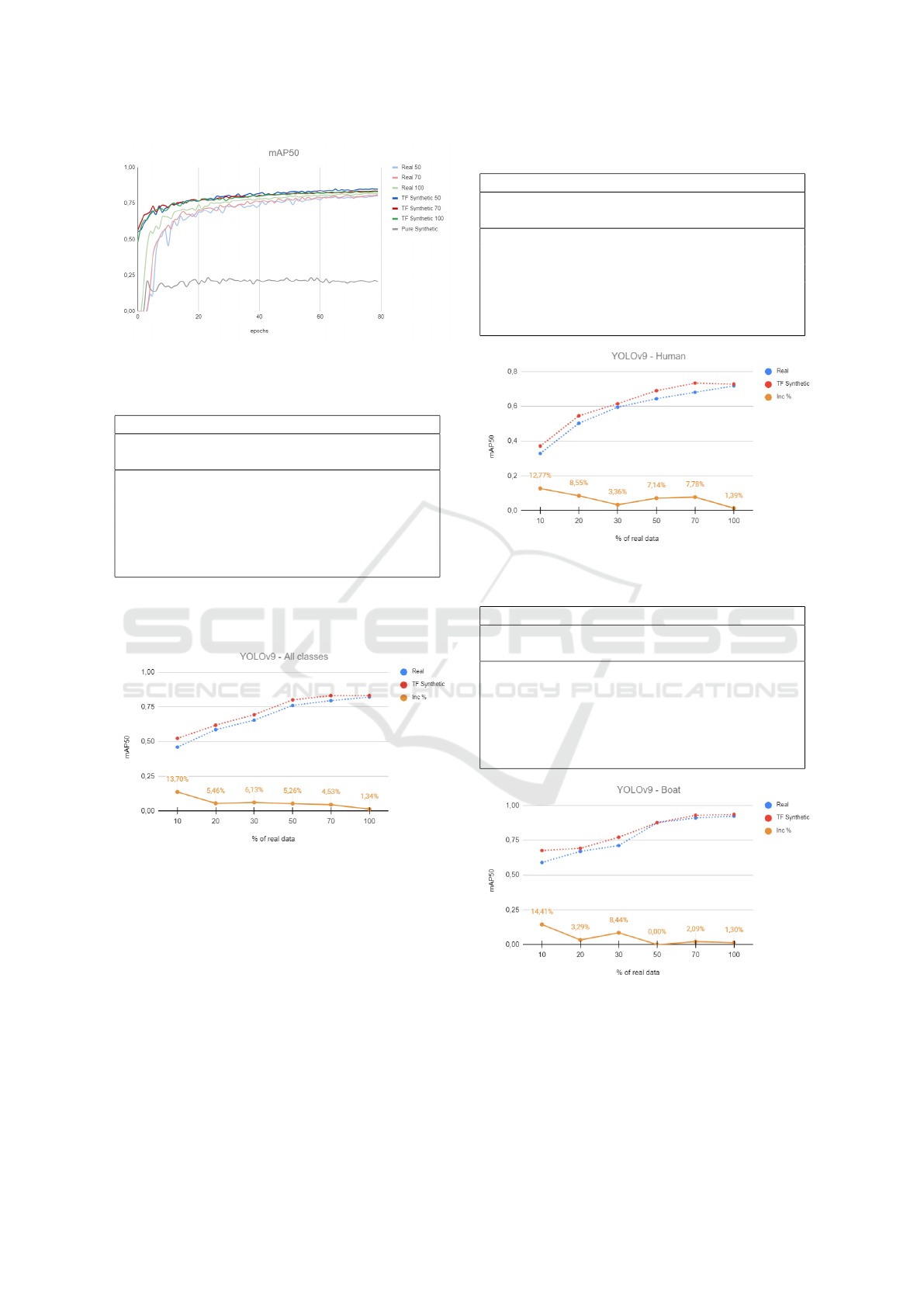
Figure 5: Training curve for 50%, 70%, 100% and syn-
thetic.
Table 1: Models performance for all classes.
mAP 50 for all classes
% of real data Real TF
Synth
Increment
10% 0.460 0.523 13.70 %
20% 0.586 0.618 5.46 %
30% 0.653 0.693 6.13 %
50% 0.760 0.800 5.26 %
70% 0.795 0.831 4.53 %
100% 0.820 0.831 1.34 %
The results from Table 1 can be seen on the Figure
6. The yellow line at the bottom indicates the incre-
ment values for different amounts of real data.
Figure 6: Performance for all classes.
In Table 2 the performance of the model detecting
the class human is shown. The correspondent graphic
representation of this data is shown in Figure 7.
The performance achieved on boat detection can
be seen in Table 3. The correspondent graphic repre-
sentation of this data is shown in Figure 8.
5 DISCUSSION
The training curves in Figure 4 and 5 reveals a trend:
a pre-training model on synthetic data converges the
mAP50 faster and keeps a higher performance during
Table 2: Models performance for class Human.
mAP 50 for Human
% of real data Real TF
Synth
Increment
10 % 0,329 0,371 12,76 %
20 % 0,503 0,546 8,54 %
30 % 0,595 0,615 3,36 %
50 % 0,644 0,69 7,14 %
70 % 0,681 0,734 7,78 %
100 % 0,718 0,728 1,39 %
Figure 7: Performance for class Human.
Table 3: Models performance for class Boat.
mAP 50 for boats
% of real data Real TF
Synth
Increment
10 % 0,590 0,675 14,4 %
20 % 0,669 0,691 3,28 %
30 % 0,711 0,771 8,43 %
50 % 0,876 0,876 0 %
70 % 0,909 0,928 2,09 %
100 % 0,922 0,934 1,3 %
Figure 8: Performance for class Boat.
all epochs when exposed to the same proportion of
real data.
Table 1 and the graph in Figure 6 show a signifi-
cant increase in performance for all classes when syn-
thetic data is used for pre-training the model com-
pared to just real data for all the different amounts
Optimizing Object Detection for Maritime Search and Rescue: Progressive Fine-Tuning of YOLOv9 with Real and Synthetic Data
213
of real images used. The progressive smaller incre-
ments as a bigger proportion of real data is used can
be expected since the availability of more real data
naturally makes the model perform better.
The same trend of best performance can be seen
on Table 2 and graph of the Figure 7, which is the
main focus for recognition on SAR missions. On the
other hand, the use of synthetic data shows a smaller
contribution on the case of boat recognition as can be
seen in Table 3 and graph of the Figure 8.
A remarkable point to mention is that according to
Table 1, when 70% of real data was used for the trans-
fer learning with the synthetic data, the model per-
formed better (0.831) than using 100% of just the real
data(0.820). This behaviour can also be observed for
Humans on Table 2 where 70% of real data in transfer
learning (0.734) performed better than 100% of real
data on training (0.718). Finally for the boat recogni-
tion occurs the same trend when transfer learning with
70% (0.928) has a better performance than 100% of
real data (0.922) as can be seen on Table 3.
Table 4 shows the model performance for the
training with only synthetic data as ”Synthetic”, only
10% of real data as ”Real” and for the transfer learn-
ing with 10% of real data on the model pre-trained on
synthetic images as ”TF 10%”. The first 3 columns in-
dicates the classes and the last columns indicates the
amount of real and synthetic data used in each pro-
cess.
Table 4: Performance for using 10% of real data.
Training
strategy
All Human Boat Synth
img
Real
img
Synthetic 0,167 0,012 0,322 7,370 0
Real 10% 0,460 0,329 0,590 0 737
TF 10% 0,523 0,371 0,675 7,370 737
This table shows that the performance of the
model when trained with just synthetic data is very
low, even if the amount of data is high (7,370). But
when a small quantity of real data (10% = 737) is used
for the transfer learning process, the model presents a
better performance than with only 10% of real data,
resulting in a 13.7% performance boost, achieving an
mAP50 of 52.3%. These results shows that even for
a small quantity of real data, the addition of synthetic
data brings a improvement on the model detection ca-
pability. This is particularly interesting once synthetic
data can be generated rapidly and at large scale.
The improved performance when combining syn-
thetic and real data can be related to a higher amount
of data provided by the synthetic images, a larger di-
versity can also lead a better capacity for the model
to generalize. The data provided on the virtual sce-
nario can also provided different elements not present
on real-world dataset, helping the model in pattern
recognition. However, the similarity between both
type of data domains can also be a limitation when
the virtual world can not accurately mimic real-world
conditions. Another challenge is when the opposite
effect can happen with the lack of real datasets con-
taining variations that can be easily generated on vir-
tual world (e.g., extreme weather or lighting condi-
tions).
The results can be compared with the findings of
(Krump and St
¨
utz, 2020), which investigated vehi-
cle detection performance using images acquired by
UAVs. The evaluation compared models trained on
real, synthetic, and mixed datasets using YOLOv3.
The reality gap was identified as the main factor im-
pacting detection accuracy, leading to the conclusion
that combining real and synthetic data improves per-
formance. While their work explored how context,
environmental conditions, and simulation parameters
influence detection accuracy, and the current work fo-
cuses on transfer learning improvements in a mar-
itime environment, the current study confirms the as-
sumptions of the previous work by demonstrating that
incorporating synthetic data with real data during the
training phase leads to performance improvements,
corroborating the results achieved by (Krump and
St
¨
utz, 2020).
6 CONCLUSION AND FUTURE
WORKS
With the progressive use of UAVs in different fields
and the emergence of powerful and resource-efficient
artificial intelligence models, the demand for data has
increased. In this work, two different datasets were
used: a real-world dataset specifically designed for
aerial recognition using drones in a maritime envi-
ronment, and a synthetic dataset developed in Un-
real Engine 4 that reflects a similar scenario. The
model YOLOv9t was trained under different config-
urations to evaluate the impact of transfer learning
with real and synthetic data. Initially, the model was
trained from scratch using different amounts of real
data. Subsequently, other models were pre-trained on
the full set of synthetic data and then fine-tuned us-
ing the same amounts of real data as the initial mod-
els. Finally, the performance of models trained with
the same amount of real data was compared, with
and without fine-tuning on synthetic data. The results
showed a better object detection score when using the
transfer learning process, with models pre-trained on
synthetic data performing better than those trained ex-
clusively on real data. This study demonstrates that
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
214

using synthetic data to train object detection systems
with YOLOv9t is a valid approach for overcoming the
challenges of real-world data acquisition. The ob-
tained results show that synthetic data is a feasible
and effective tool, particularly in the context of search
and rescue operations using transfer learning meth-
ods. The performance improvement when exposing
the model to even 10% of real data is notable. Special
attention should be given to the observation that trans-
fer learning with 70% of real data performed better
than models trained on 100% real data. This approach
of using small amounts of real data opens up the pos-
sibility of training models even when real-world data
is sparse, as synthetic data can be generated rapidly
and in large quantities.
The capability of easy virtual dataset generation
can be explored to address the creation of a mas-
sive amount of synthetic data compared to real data.
Higher similarity between synthetic and real image
datasets can also be considered to improve the model,
or studies could focus on increasing the diversity of
synthetic datasets to achieve better generalization for
real-world recognition. Further work can be done by
expanding the datasets to include different weather,
lighting, and sea conditions for both real and synthetic
data. The expansion of the evaluation to different do-
mains, such as terrestrial SAR operations, can also be
explored. Incorporating different noise sources, like
dust and humidity affecting camera lenses, can further
simulate real-world conditions. According to (Krump
and St
¨
utz, 2021), the main difference between real
and synthetic data, referred to as the ”reality gap,” is
related to general coloration, the absence of noise, and
the lack of fine structures. This opens the possibility
for further research to bridge this gap.
Implementation and testing in real-world scenar-
ios can be explored, evaluating the integration of all
solutions with hardware constraints and associated
challenges. These constraints may include factors
such as different camera resolutions, embedded pro-
cessing power, and image stabilization systems (gim-
bal). Hardware limitations could significantly impact
performance, and comparisons of the current model
YOLOv9t with different architectures can help op-
timize factors such as recognition time, training re-
quirements, and effectiveness.
ACKNOWLEDGEMENTS
This research work is partially funded by EU Hori-
zon Europe under the project entitled “Smart Mar-
itime and Underwater Guardian (SMAUG)” with
grant number 101121129.
REFERENCES
Bird, J. J., Faria, D. R., Ek
´
art, A., and Ayrosa, P. P. S.
(2020). From simulation to reality: Cnn transfer learn-
ing for scene classification. In 2020 IEEE 10th Inter-
national Conference on Intelligent Systems (IS), pages
619–625.
Dabbiru, L., Goodin, C., Carruth, D., and Boone, J. (2023).
Object detection in synthetic aerial imagery using
deep learning. In Dudzik, M. C., Jameson, S. M.,
and Axenson, T. J., editors, Society of Photo-Optical
Instrumentation Engineers (SPIE) Conference Series,
volume 12540 of Society of Photo-Optical Instru-
mentation Engineers (SPIE) Conference Series, page
1254002.
DotCam, TK-Master, Zoc, and Elble, S. (2022). Environ-
mentproject. https://github.com/UE4-OceanProject/
Environment-Project.
Everingham, M., Eslami, S. M. A., Gool, L. V., Williams, C.
K. I., Winn, J. M., and Zisserman, A. (2014). The pas-
cal visual object classes challenge: A retrospective.
International Journal of Computer Vision, 111:98 –
136.
Games, E. Unreal engine. https://www.unrealengine.com.
Accessed: 2024-02-22.
G
´
eron, A. (2017). Hands-on machine learning with Scikit-
Learn and TensorFlow : concepts, tools, and tech-
niques to build intelligent systems. O’Reilly Media,
Sebastopol, CA.
IAMSAR, I. (2022). International aeronautical and mar-
itime search and rescue manual. Mission coordina-
tion, 2.
Jayalath, K. and Munasinghe, R. (2021). Drone-based au-
tonomous human identification for search and rescue
missions in real-time. pages 518–523.
Kratzke, T. M., Stone, L. D., and Frost, J. R. (2010). Search
and rescue optimal planning system. In 2010 13th In-
ternational Conference on Information Fusion, pages
1–8.
Krump, M. and St
¨
utz, P. (2020). Uav based vehicle de-
tection with synthetic training: Identification of per-
formance factors using image descriptors and ma-
chine learning. In Modelling and Simulation for
Autonomous Systems: 7th International Conference,
MESAS 2020, Prague, Czech Republic, October 21,
2020, Revised Selected Papers, page 62–85, Berlin,
Heidelberg. Springer-Verlag.
Krump, M. and St
¨
utz, P. (2021). Uav based vehicle detec-
tion with synthetic training: Identification of perfor-
mance factors using image descriptors and machine
learning. In Mazal, J., Fagiolini, A., Vasik, P., and
Turi, M., editors, Modelling and Simulation for Au-
tonomous Systems, pages 62–85, Cham. Springer In-
ternational Publishing.
Lima, L., Andrade, F., Djenouri, Y., Pfeiffer, C., and Moura,
M. (2023). Empowering search and rescue operations
with big data technology: A comprehensive study
of yolov8 transfer learning for transportation safety.
pages 2616–2623.
Optimizing Object Detection for Maritime Search and Rescue: Progressive Fine-Tuning of YOLOv9 with Real and Synthetic Data
215

Lin, T.-Y., Maire, M., Belongie, S., Bourdev, L., Girshick,
R., Hays, J., Perona, P., Ramanan, D., Zitnick, C. L.,
and Doll
´
ar, P. (2015). Microsoft coco: Common ob-
jects in context.
Pettersvold, J., Wiulsrod, M., and Hallgreen, S. (2023).
Synthetic data generation for search and rescue mis-
sions. a novel approach using unreal engine, airsim,
and raycast. Bachelor’s thesis, University of South-
Eastern Norway.
Qingqing, L., Taipalmaa, J., Queralta, J. P., Gia, T. N., Gab-
bouj, M., Tenhunen, H., Raitoharju, J., and Wester-
lund, T. (2020). Towards active vision with uavs in
marine search and rescue: Analyzing human detec-
tion at variable altitudes. In 2020 IEEE International
Symposium on Safety, Security, and Rescue Robotics
(SSRR), pages 65–70.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time ob-
ject detection.
Tu
´
snio, N. and Wr
´
oblewski, W. (2022). The efficiency of
drones usage for safety and rescue operations in an
open area: A case from poland. Sustainability, 14(1).
Ultralytics (2022). ultralytics/yolov5: v7.0 - YOLOv5
SOTA Realtime Instance Segmentation. https://
github.com/ultralytics/yolov5.com. Accessed: 7th
May, 2023.
Upton, E. and Halfacree, G. (2014). Raspberry Pi User
Guide. John Wiley & Sons.
V7Labs (2022). Mean average precision (map) explained:
Everything you need to know. Accessed on March 20,
2024.
Varga, L. A., Kiefer, B., Messmer, M., and Zell, A. (2021).
Seadronessee: A maritime benchmark for detecting
humans in open water.
Wang, C.-Y. and Liao, H.-Y. M. (2024). YOLOv9: Learning
what you want to learn using programmable gradient
information.
Xing, D. and Tzes, A. (2023). Synthetic aerial dataset
for uav detection via text-to-image diffusion models.
In 2023 IEEE Conference on Artificial Intelligence
(CAI), pages 51–52.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
216
