
The Evolution of Criticality in Deep Reinforcement Learning
Chidvilas Karpenahalli Ramakrishna
a
, Adithya Mohan
b
, Zahra Zeinaly
c
and Lenz Belzner
d
AImotion Bavaria, Technische Hochschule Ingolstadt, Esplanade 10, 85049 Ingolstadt, Germany
Keywords:
Criticality, Deep Reinforcement Learning, Agents, Autonomous Driving, Deep Q-Learning (DQN), Trust.
Abstract:
In Reinforcement Learning (RL), certain states demand special attention due to their significant influence on
outcomes; these are identified as critical states. The concept of criticality is essential for the development of ef-
fective and robust policies and to improve overall trust in RL agents in real-world applications like autonomous
driving. The current paper takes a deep dive into criticality and studies the evolution of criticality throughout
training. The experiments are conducted on a new, simple yet intuitive continuous cliff maze environment and
the Highway-env autonomous driving environment. Here, a novel finding is reported that criticality is not only
learnt by the agent but can also be unlearned. We hypothesize that diversity in experiences is necessary for
effective criticality quantification which is majorly driven by the chosen exploration strategy. This close rela-
tionship between exploration and criticality is studied utilizing two different strategies namely the exponential
ε-decay and the adaptive ε-decay. The study supports the idea that effective exploration plays a crucial role in
accurately identifying and understanding critical states.
1 INTRODUCTION
Reinforcement Learning (RL) derives its name from
the process of optimizing policy through a reward
mechanism, which utilizes both positive and nega-
tive reinforcements to guide decision-making. Deep
reinforcement learning (DRL) combines the approx-
imation and generalization capabilities of neural net-
works with RL to allow agents to operate in complex,
high-dimensional state and action spaces. Apart from
enjoying incredible success in complex games (Mnih,
2013; Silver et al., 2016; Silver et al., 2017), DRL has
also demonstrated remarkable success in addressing
challenges related to autonomous driving (Ravi Kiran
et al., 2022; Li et al., 2020), recommendation systems
(Afsar et al., 2022; Chen et al., 2021), robotics (Gu
et al., 2016), supply chain management and produc-
tion (Panzer and Bender, 2022; Hubbs et al., 2020;
Boute et al., 2022), energy management (Santorsola
et al., 2023) and other real-world applications. Al-
though significant advancements have been made in
the field of DRL, some challenges exist and one such
key concept in DRL that requires attention is that of
critical states (Spielberg and Azaria, 2019). Critical
a
https://orcid.org/0009-0001-3091-9523
b
https://orcid.org/0009-0004-3572-9982
c
https://orcid.org/0009-0006-8575-9033
d
https://orcid.org/0009-0002-4683-5460
states in the context of a Markov Decision Process
(MDP) and RL are states in which the choice of action
significantly influences the outcome. In other words,
these are the states where the agent strongly prefers
certain actions over others. The ability to detect and
handle critical states is essential for building trust
in RL systems, especially in real-world applications
like Autonomous Driving (AD) (Huang et al., 2018).
Monitoring the performance alone is insufficient as a
trustworthy agent would also retain awareness of the
consequences of incorrect actions. Hence, trust in the
system may diminish if the agent’s understanding of
criticality degrades during learning. Studying the evo-
lution of criticality ensures safe decision-making, a
topic that, to our knowledge, has not been explored in
prior work. Our contribution in the current research is
threefold,
• First, we study the evolution of criticality during
the learning process.
• We report a novel finding of unlearning criticality,
which compromises safety and trust in RL sys-
tems, as it leads to policies that perform well but
ignore criticality in decision-making.
• We hypothesize that effective criticality quantifi-
cation requires sufficient visits and diverse expe-
riences in critical states. This is validated through
a study of two exploration strategies, showing that
enhanced exploration can help retain criticality.
Karpenahalli Ramakrishna, C., Mohan, A., Zeinaly, Z. and Belzner, L.
The Evolution of Criticality in Deep Reinforcement Learning.
DOI: 10.5220/0013114200003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 3, pages 217-224
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
217

2 BACKGROUND
2.1 Markov Decision Process (MDP)
An MDP models sequential decision-making as a tu-
ple (S,A,P,R, γ). Here, S is the state space, A is the
action space, P(s
′
|s,a) is the transition probability,
R(s,a, s
′
) is the reward function and γ is the discount
factor which controls future rewards. MDPs satisfy
the Markov property, where the next state s
′
depends
only on the current state s and action a. When P and
R are unknown, RL methods are used to learn optimal
policies through environmental interactions.
2.2 Q-value
The action-value function or the Q-value function
Q
π
(s,a) represents the expected cumulative reward an
agent receives by starting from a given state s and tak-
ing an action a and following a policy π(a|s). Q
π
(s,a)
is shown in equation (1). Here, s
0
and a
0
are the initial
state and action respectively, γ is the discount factor, t
represents the time step and R is the reward function.
Q
π
(s,a) contains encoded information regarding the
long-term effects of choosing an action a in state s.
Q
π
(s,a) = E
π
[
∞
∑
t=0
γ
t
R(s
t
,a
t
,s
t+1
)|s
0
= s, a
0
= a] (1)
2.3 Criticality in Reinforcement
Learning
A critical state is one where the chosen action sig-
nificantly impacts the outcome. Such states exhibit
high variability in the expected return, which corre-
sponds to the variance of the Q-function (Spielberg
and Azaria, 2019; Karino et al., 2020; Spielberg and
Azaria, 2022). Based on this, the current study uses
the variance of the Q-function across all actions as the
criticality metric C, as shown in equation (2).
C = Var[Q
π
(s,a)] (2)
2.4 Policy-Dependent Criticality
As shown in equation (2), the criticality metric de-
pends on the Q-function which is policy-dependent,
i.e., Q
π
(s,a). Consequently, the criticality of a
state evolves during training as Q-values are updated
(Spielberg and Azaria, 2019). This paper studies this
evolution to understand the agent’s perspective of crit-
icality as an agent’s ability to detect, handle and retain
critical states, alongside its performance, is essential
for building trust in RL systems (Huang et al., 2018).
2.5 Exploration and Criticality
As discussed in sub-section 2.4, criticality is policy-
dependent since the Q-function Q
π
(s,a) evolves with
policy updates. We hypothesize that for effective crit-
icality quantification, the agent has to satisfy the fol-
lowing two conditions,
1. Sufficiently visit critical states.
2. Understand the effect of different actions in criti-
cal states, including the consequences of incorrect
actions. So, diversity in experience is crucial for
effective criticality quantification. Here, diversity
of experience refers to the targeted exploration us-
ing the actions that give us a better understanding
of the critical states.
The above conditions are primarily governed by
the chosen exploration strategy. To study this rela-
tionship, we compare two strategies namely fixed ex-
ponential ε-decay (ε
exp
) and adaptive ε-decay (ε
ad
).
The ε
exp
strategy applies a fixed exponential decay to
ε reducing it to a minimum value over time. When
progress remaining p
i
is explicitly available from the
environment such as Highway-env (Leurent, 2018),
ε
exp
is decayed as shown in equation (3). Here, i is
the episode, ε
min
and ε
max
are the minimum and max-
imum exploration rates and λ is a decay factor con-
trolling the rate of decrease.
ε
i
exp
= max(ε
min
,ε
max
·e
−λ·(1−p
i
)
), (3)
ε
i
ad
=
(
max(ε
min
,ε
i−1
ad
.λ), R
i
avg
> R
i−1
avg
best
min(ε
i−1
ad
,ε
i−1
ad
/λ), R
i
avg
≤ R
i−1
avg
best
(4)
In contrast, ε
ad
adjusts ε based on performance
as shown in equation (4). Here, R
i
avg
is the average
reward until the i
th
episode, and R
i−1
avg
best
is the best
average reward up to the (i −1)
th
episode. By adjust-
ing exploration based on performance, ε
ad
is expected
to encourage further exploration in critical states, im-
proving the diversity of experiences and aiding in bet-
ter criticality quantification.
3 RELATED WORK
3.1 Fundamental Research
Criticality in RL was first introduced as the variability
in the expected return across actions (Spielberg and
Azaria, 2019). The paper introduces the Criticality-
Based Varying Stepnumber (CVS) algorithm that uti-
lizes criticality to adapt the step number in n-step al-
gorithms like n-step SARSA. State Importance (SI),
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
218

introduced in (Karino et al., 2020), uses Q-value vari-
ance to identify critical states, promoting exploitation
in critical states and exploration in non-critical ones.
Here, results in Atari and Walker2D showed faster
learning compared to ε-greedy. In (Liu et al., 2023), a
Deep State Identifier (DSI) method is introduced that
detects critical states from video trajectories using re-
turn prediction and masking, validated on grid-world
and Atari environments.
3.2 Autonomous Driving and Trust
In (Huang et al., 2018), the authors show that iden-
tifying and acting safely in critical states improves
trust in black-box policies. In (Hwang et al., 2022),
the authors introduce Critical Feature Extraction
(CFE) which improves Inverse Reinforcement Learn-
ing (IRL) efficiency by identifying critical states from
both positive and negative demonstrations, reducing
computation while maintaining quality.
3.3 Adversarial Attacks
Adversarial strategies like strategically-timed attacks
disrupt RL by targeting critical states, achieving sim-
ilar performance degradation as continuous attacks
with minimal intervention (Lin et al., 2017). Statis-
tical metrics in (Kumar et al., 2021) showed that tar-
geting critical states which make up about 1% of the
states, reduced agent’s performance by 40%.
3.4 Human-in-the-Loop RL
The studies (Ju, 2019), (Ju et al., 2020) and (Ju et al.,
2021) use criticality in pedagogy to enhance learning
in interactive learning environments, such as Intelli-
gent Tutoring Systems (ITS). Criticality-Based Advice
(CBA) (Spielberg and Azaria, 2022) integrates hu-
man advice for critical states, improving learning ef-
ficiency. Here, Plain CBA requests advice when criti-
cality exceeds a threshold, while Meta CBA combines
criticality with existing strategies, outperforming tra-
ditional advice in grid world and Atari environments.
3.5 Literature Gap
Despite significant work on criticality, no study ex-
plores its evolution during training. We believe that
studying this evolution will further enhance our un-
derstanding of what factors contribute to effective
criticality quantification. In the current paper, we
wish to address this gap by taking a deep dive into
the evolution of criticality by closely studying the re-
lationship between exploration and criticality.
Figure 1: The continuous cliff maze environment where the
agent is marked blue, the goal is green and the danger zones
(cliffs) are red. Here, the agent starts from the top left corner
and must navigate through the cliffs in the middle to reach
the goal in the bottom right corner. The agent, when passing
through the narrow passage is restricted from taking actions
in other directions making this region highly critical. The
narrow gap is kept at 0.3 units of vertical width and an ac-
tion step size of 0.5 is used.
4 EXPERIMENTAL SETUP
4.1 Environments
To study the evolution of criticality and the effect
of exploration strategies, we use two environments
namely the Continuous Cliff Maze and Highway-env
(Leurent, 2018). The lightweight and interpretable
Continuous Cliff Maze tests our hypothesis on explo-
ration and criticality, while Highway-env extends the
study to autonomous driving scenarios.
4.1.1 Continuous Cliff Maze
The Continuous Cliff Maze as shown in figure 1, is a
modified version of the discrete maze in (Karino et al.,
2020), with a continuous state space and discrete ac-
tion space. It provides an intuitive, static environment
to study criticality in a continuous state space using
DRL. The central narrow gap and surrounding cliffs
represent highly critical regions where action choices
are restricted. The agent receives −1 reward for en-
tering cliffs and +10 for reaching the goal.
4.1.2 Highway
The Highway-env (Leurent, 2018) is a collection of
environments to train and test DRL agents in au-
tonomous driving scenarios. It offers multiple envi-
ronments like Merge, Intersection and Roundabout.
In the current paper, we choose the Highway envi-
ronment to study criticality quantification in highway
autonomous driving scenarios. In the Highway envi-
ronment, the state space is continuous and we choose
discrete meta-actions namely a = {0 : Lane le f t, 1 :
The Evolution of Criticality in Deep Reinforcement Learning
219
(a) 200
th
episode. (b) 500
th
episode.
(c) 1200
th
episode. (d) 1900
th
episode.
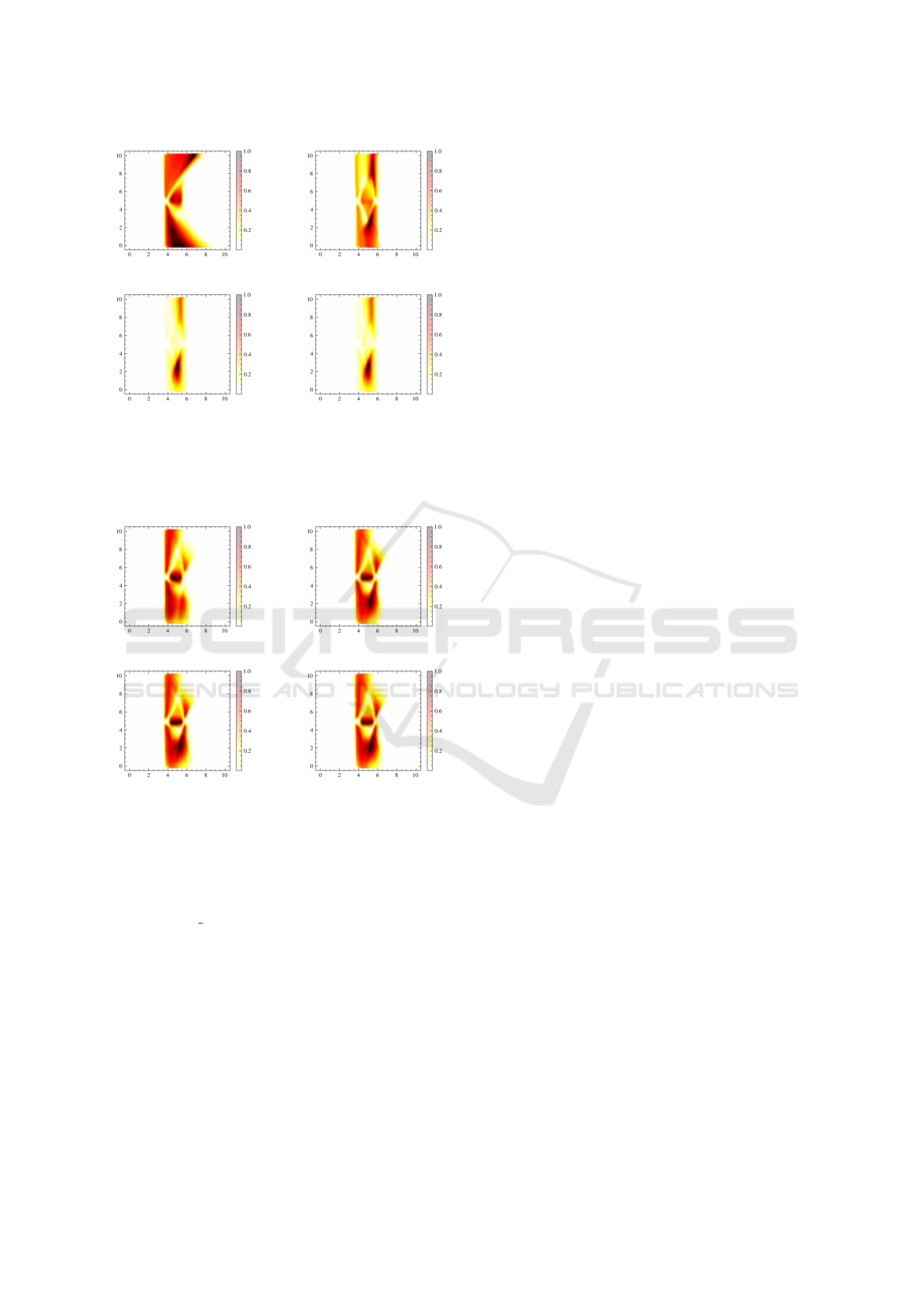
Figure 2: Normalized heatmaps of the evolution of critical-
ity in the continuous cliff maze environment for four model
checkpoints of one of the trials of the DQN
exp
model. The
images show a clear unlearning of the criticality of the cen-
tral narrow cliff and the surrounding regions.
(a) 200
th
episode. (b) 500
th
episode.
(c) 1200
th
episode. (d) 1900
th
episode.
Figure 3: Normalized heatmaps of the evolution of critical-
ity in the continuous cliff maze environment for four model
checkpoints of one of the trials of the DQN
ad
model. The
images show the retention of critical information about the
central narrow cliff and surroundings.
Idle,2 : Lane right,3 : Faster, 4 : Slower}. Once we
train the agent, we test it on four hand-crafted critical
scenarios as shown in figure 4, to study the evolution
of criticality.
4.2 Algorithm
Given the two environments in sub-section 4.1, which
both have a continuous state space and a discrete ac-
tion space, we train DRL agents using a Deep Q-
Network (DQN) algorithm (Mnih, 2013). The output
Q-values are used to quantify the criticality of a state
s using equation (2). For exploration, we employ ε
exp
and ε
ad
, denoting the resulting models as DQN
exp
and
DQN
ad
, respectively. These models are used to study
the effect of exploration strategies on criticality quan-
tification.
5 RESULTS AND DISCUSSION
5.1 Continuous Cliff Maze
We train five DQN
exp
and DQN
ad
models for 2,000
episodes, clipping ε between 0.9 and 0.01, with a step
limit of 5, 000 and a replay buffer of 50, 000. Model
checkpoints are saved every 100
th
episode to study the
evolution of criticality.
5.1.1 Evolution of Criticality
The evolution of criticality is analyzed using criti-
cality heatmaps. Figure 2 shows that DQN
exp
ex-
hibits unlearning of criticality in the given environ-
ment, while figure 3 demonstrates that DQN
ad
ap-
pears to retain criticality throughout training. To in-
vestigate this phenomenon, we analyze performance,
critical state visitations and action diversity.
5.1.2 Performance Study
Figure 5 shows the epsilon decay curves. The Simple
Moving Average (SMA) reward curves in figure 6 con-
verge around 1,200 episodes. Despite differences in
epsilon decay, no significant performance difference
is observed, ruling out performance as the cause of
criticality unlearning in DQN
exp
.
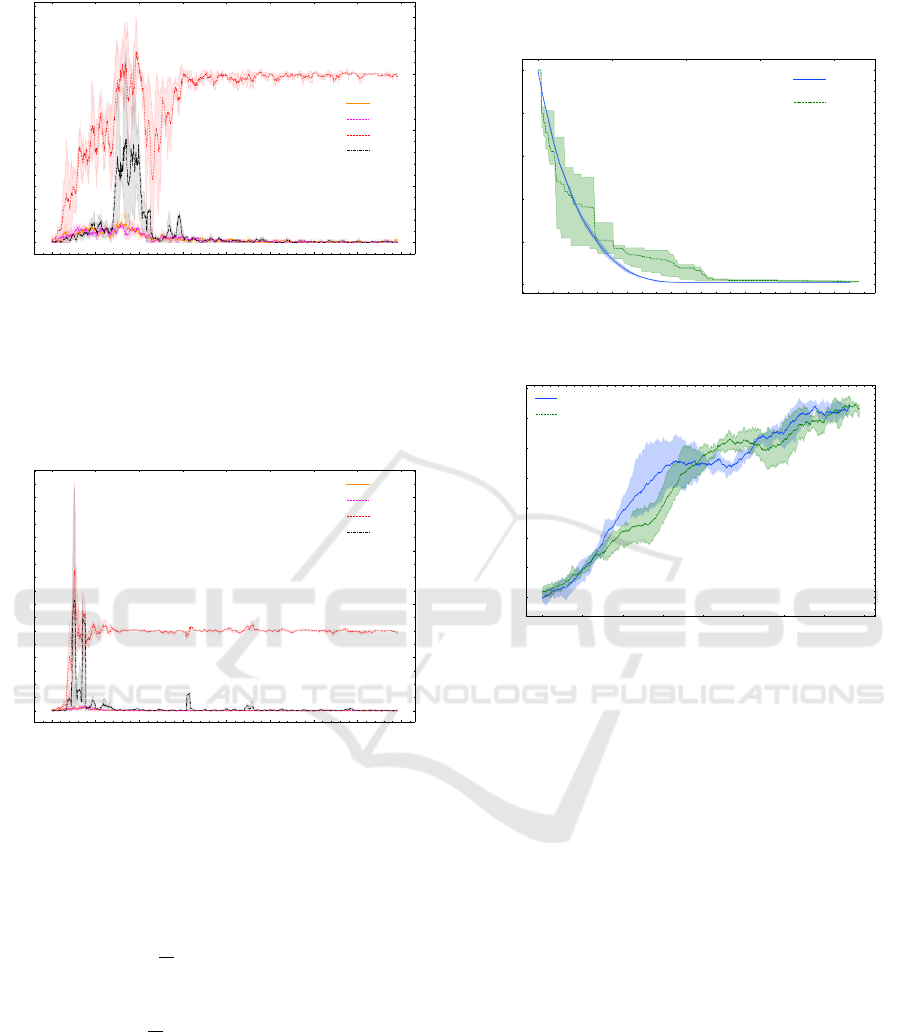
5.1.3 Critical State Visitations and Action
Diversity
An agent must substantially visit critical states to gain
knowledge of them. Figure 7 shows that DQN
exp
and
DQN
ad
visit the central narrow gap, the Region of In-
terest (ROI), about 6,000 times each thus ruling out
the number of visitations as the reason for the unlearn-
ing. Figures 8 and 9 illustrate action selection strate-
gies. DQN
ad
greatly prefers Right and Le f t actions,
showing a preference for those actions that facilitate
extended exploration of critical states. While DQN
exp
selects actions more uniformly, including U p and
Down, which terminate the episode. This difference
in action selection appears to contribute to DQN
ad
’s
ability to retain criticality, whereas DQN
exp
shows a
tendency to lose it. This suggests that a targeted di-
versity in experiences may contribute to effective crit-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
220
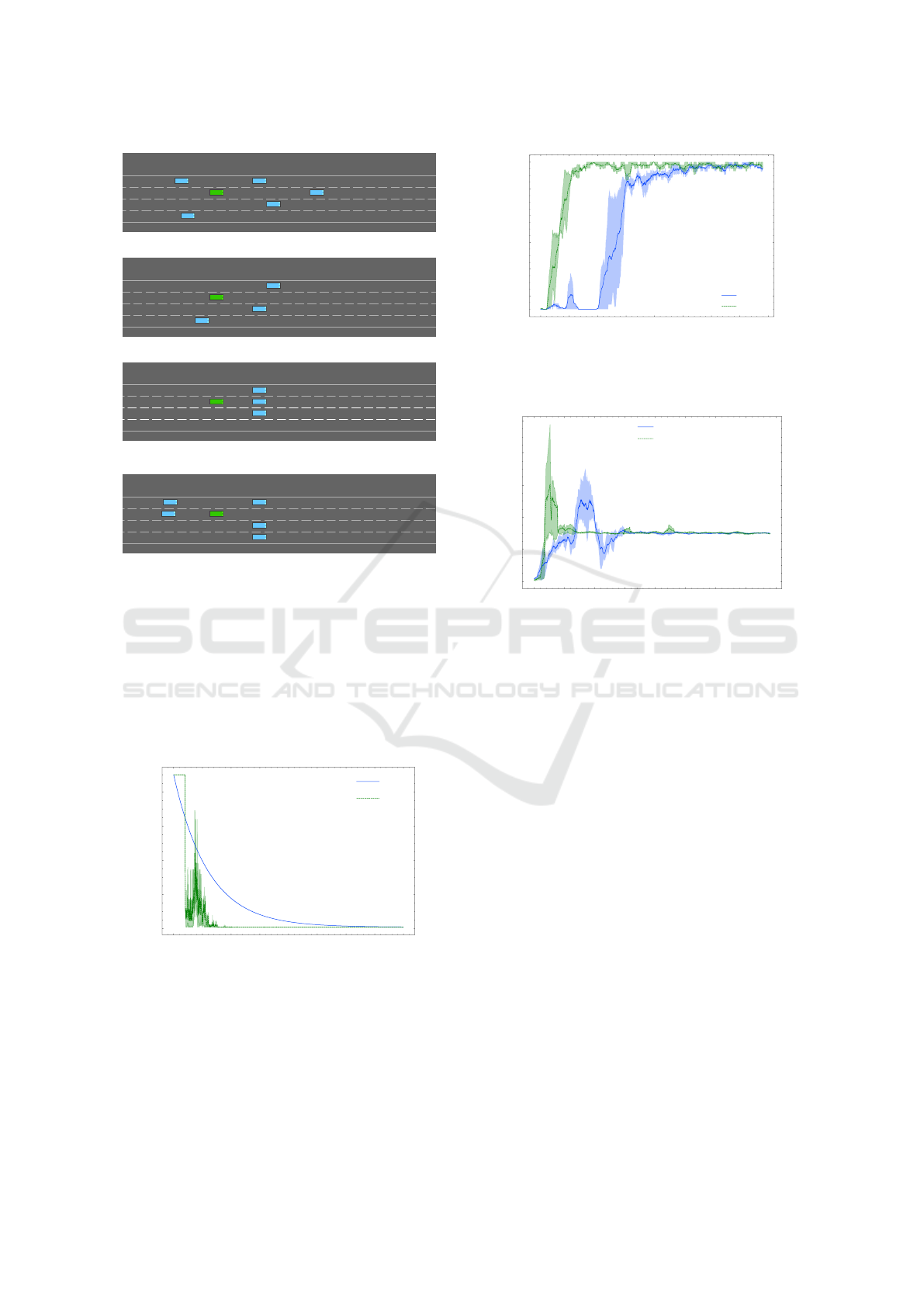
(a) Critical scenario 1.
(b) Critical scenario 2.
(c) Critical scenario 3.
(d) Critical scenario 4.
Figure 4: The four hand-crafted critical scenarios in the
Highway environment with the ego vehicle in green and the
surrounding vehicles in blue. Here the ego (agent) is re-
stricted in its actions and has to carefully navigate through
the surrounding vehicles without crashing. (a) The ego can
either overtake on the right or slowly pass through the vehi-
cles in front. (b) The ego has to pass through the vehicles in
front (c) The ego has to overtake on the right or slow down.
(d) The ego has to pass through the vehicles in front without
slowing down to prevent a collision with the vehicles at the
back.
0 250 500 750 1000 1250 1500 1750 2000
Episode
0.0
0.2
0.4
0.6
0.8
Epsilon
exp
ad
Figure 5: The epsilon decay curves for five trials of DQN
exp
and DQN
ad
models respectively. The plot is represented
using mean and 20 −80 percentile bands.
icality quantification. Another important thing to note
is that although figure 5 shows that ε
ad
decays more
rapidly than ε
exp
, figure 9 indicates longer episodes
experienced by DQN
ad
resulting in enhanced explo-
ration.
0 250 500 750 1000 1250 1500 1750 2000
Episode
0
2
4
6
8
10
SMA Reward
DQN
exp
DQN
ad
Figure 6: The SMA reward curves for five trials of DQN
exp
and DQN
ad
models respectively, where the window size to
calculate the average is set to 50 episodes. The plot is rep-
resented using mean and 20 −80 percentile bands.
0 250 500 750 1000 1250 1500 1750 2000
Episode
0
2
4
6
8
10
SMA Visitations
DQN
exp
(total visits: 5700.2±315.43)
DQN
ad
(total visits: 6033.0±223.98)
Figure 7: Critical states visitation during training presented
as an SMA curve. Here, the ROI is the central narrow gap
between the two cliffs. The window size for SMA is fixed
to 50 episodes.
Given the similar performance of both models, the
retention of criticality by DQN
ad
suggests that it may
be a more reliable and trustworthy choice under the
given conditions.
5.2 Highway
The findings from the cliff maze environment are ex-
tended to a more complex Highway environment. We
train five DQN
exp
and five DQN
ad
models using the
standard DQN implementation from stable baselines3
(Raffin et al., 2021). Training is conducted for 50,000
steps with ε clipped between 1.0 and 0.01. Model
checkpoints are saved every 100
th
episode and crit-
icality is calculated for four hand-crafted scenarios
given in figure 4.
The evolution of criticality is analyzed as mean
and variance curves using equations (5) and (6).
For each scenario, criticality C
j
m
= Var[Q
π
(s,a)]
j
m
is
computed at the j
th
checkpoint across all m trials.
The mean µ
j
C
reflects overall trends, while variance
Var[C]
j
captures variability. These results are illus-
trated in the Evolution of Criticality plot (EC-plot),
which conveys curve trends, with the Y-scale being
The Evolution of Criticality in Deep Reinforcement Learning
221
0 250 500 750 1000 1250 1500 1750 2000
Episode
0
1
2
3
4
SMA of Action Frequency
Up
Down
Right
Left
Figure 8: The SMA curve of action frequency of DQN
exp
agents during training, with a window size of 20. The ROI
is the central narrow gap between the two cliffs. The plot
is presented as mean and 20 −80 percentile bands for each
action. The Y-axis shows the average number of times each
action was chosen by the DQN
exp
agents per episode. The
plots show the DQN
exp
agents actively choosing U p and
Down actions until the end of 750 episodes.
0 250 500 750 1000 1250 1500 1750 2000
Episode
0
2
4
6
8
SMA of Action Frequency
Up
Down
Right
Left
Figure 9: The SMA curve of action frequency of DQN
ad
agent during training, with a window size of 20. The ROI
is the central narrow gap between the two cliffs. The plot
is presented as mean and 20 −80 percentile bands for each
action. The plots show that the DQN
ad
agents having a very
high preference for Right and Le f t actions.
proportional to Q-values but not of significance.
µ
j
C
=
1
m
∑
m
Var[Q
π
(s,a)]
j
m
(5)
Var[C]
j
=
1
m
∑
m
(Var[Q
π
(s,a)]
j
m
−µ
j
C
)
2
(6)
5.2.1 Performance Study
The ε
exp
and ε
ad
decay curves are shown in Figure 10
as mean and 20 −80 percentile bands. The ε
ad
decay
exhibits a step-like behaviour, reducing exploration
only when the average reward improves as shown in
equation (4)). This promotes extended exploration,
enhancing action diversity in critical states in contrast
to ε
exp
.
0 500 1000 1500 2000
Episode
0.0
0.2
0.4
0.6
0.8
1.0
Epsilon
exp
ad
Figure 10: The ε
exp
and ε
ad
decay curves with mean and
20 −80 percentile bands.
0 250 500 750 1000 1250 1500 1750 2000
Episode
10.0
12.5
15.0
17.5
20.0
22.5
25.0
27.5
SMA reward
DQN
exp
DQN
ad
Figure 11: The SMA reward curves for DQN
exp
and DQN
ad
as mean and 20 −80 percentile bands, with a window size
of 200 episodes.
The SMA reward curves in figure 10 show higher
variability for DQN
exp
due to identical decay sched-
ules across trials, leading to differences in experience
diversity. For DQN
ad
, the reward curves are more sta-
ble despite varying decay behaviour, indicating con-
sistent learning. By the end of 2,000 episodes, both
models achieve similar performance enabling a fair
comparison.
5.2.2 EC-plots
The EC-plot for DQN
exp
in figure 12 shows a sharp
increase in criticality from episode 1 to 1, 000, align-
ing with the exploration phase as shown in figures
10 and 11. The criticality peaks around episode 900
in scenario 1, followed by a gradual decrease with
low variance. For scenarios 2 and 4, criticality drops
sharply after episode 1,000 with fluctuations, while
scenario 3 shows a gradual decline. These trends mir-
ror the unlearning behaviour observed in the continu-
ous cliff maze environment.
Comparing the epsilon decay, rewards, and EC-
plot reveals that criticality unlearning occurs after
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
222
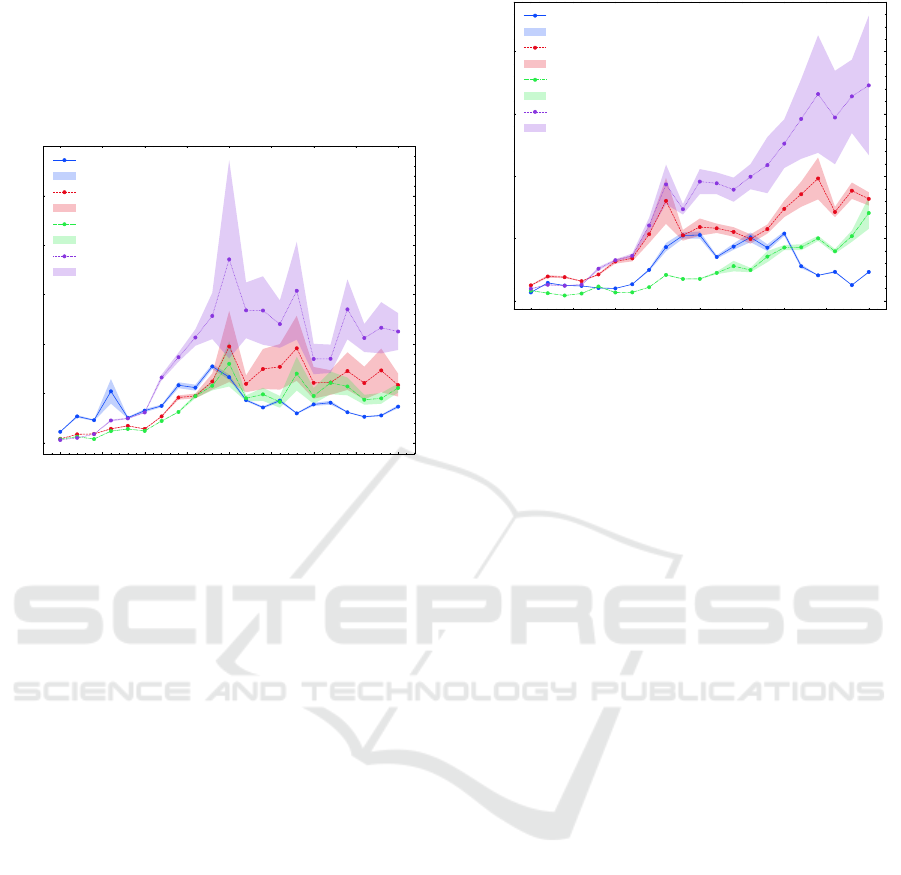
the reduced exploration phase around episode 1, 000,
even as model performance continues to improve.
This highlights that criticality can be unlearned, a cru-
cial consideration for real-world applications like au-
tonomous driving, where retaining criticality is essen-
tial for overall safety and trust.
0 250 500 750 1000 1250 1500 1750 2000
Episodes
0.0
0.1
0.2
0.3
0.4
0.5
Criticality (C = V ar[Q
π
(s, a)])
µ
C
Scenario 1
V ar[C] Scenario 1
µ
C
Scenario 2
V ar[C] Scenario 2
µ
C
Scenario 3
V ar[C] Scenario 3
µ
C
Scenario 4
V ar[C] Scenario 4
Figure 12: The EC-plot for the DQN
exp
model for the four
hand-crafted critical scenarios. A general unlearning of crit-
icality can be observed for all four scenarios during training.
The EC-plot for DQN
ad
depicted in figure 13
shows that the ε
ad
strategy retains awareness of crit-
icality throughout training, with criticality increasing
gradually in scenarios 2 and 3 and sharply in scenario
4, though with high variance. However, unlearning
persists for scenario 1 after episode 1, 500, indicat-
ing room for improvement in the ε
ad
schedule and
developing more advanced exploration strategies that
guarantee criticality retention. Given the similar per-
formance of DQN
exp
and DQN
ad
, the latter is prefer-
able as it retains criticality. For real-world applica-
tions like autonomous driving, agents must not only
perform well but also retain awareness of criticality
to ensure safe decision-making which makes DQN
ad
the suitable choice.
6 CONCLUSIONS
This study provides insights into the evolution of
criticality during training, emphasizing the im-
portance of sufficient state visitations and diverse
experiences for effective criticality quantification.
By comparing two exploration strategies, ε
exp
and
ε
ad
, we observe that the ε
ad
strategy tends to retain
criticality throughout training, while ε
exp
models
exhibit a tendency for unlearning, despite achieving
comparable performance. This behaviour is observed
consistently across both a static continuous cliff
0 250 500 750 1000 1250 1500 1750 2000
Episodes
0.0
0.1
0.2
0.3
0.4
Criticality (C = V ar[Q
π
(s, a)])
µ
C
Scenario 1
V ar[C] Scenario 1
µ
C
Scenario 2
V ar[C] Scenario 2
µ
C
Scenario 3
V ar[C] Scenario 3
µ
C
Scenario 4
V ar[C] Scenario 4
Figure 13: The EC-plot of the DQN
ad
model for four hand-
crafted critical scenarios. We observe sharp sustained and
increasing criticality curves for critical scenarios 2, 3, and 4
while unlearning is still observed for critical scenario 1.
maze environment and a more dynamic, complex
Highway environment suggesting that ε
ad
may be
more reliable for safety-critical applications such
as autonomous driving. While our findings suggest
that the ε
ad
strategy retains criticality better than
ε
exp
, we note that the effectiveness of an exploration
strategy can depend on the environment and training
dynamics. A more advanced exploration strategy that
proactively ensures targeted diversity is needed. To
support further research into the topic, the code used
in the current research is available at our GitHub
repository [https://github.com/aimotion-autonomous-
driving-cluster/The-Evolution-of-Criticality-in-
Deep-Reinforcement-Learning.git].
In the future, we aim to use more robust critical-
ity metrics for scenario generation (Westhofen et al.,
2023) and study criticality in entropy-based RL meth-
ods like Soft Actor-Critic (SAC). Additionally, we
will investigate the interplay between criticality and
model uncertainty, as higher Var[Q
π
(s,a)] values may
reflect uncertainty rather than criticality and high un-
certainty need not correspond to higher criticality.
REFERENCES
Afsar, M. M., Crump, T., and Far, B. (2022). Reinforcement
learning based recommender systems: A survey. ACM
Computing Surveys, 55(7):1–38.
Boute, R. N., Gijsbrechts, J., Van Jaarsveld, W., and Van-
vuchelen, N. (2022). Deep reinforcement learning for
inventory control: A roadmap. European Journal of
Operational Research, 298(2):401–412.
Chen, X., Yao, L., McAuley, J., Zhou, G., and Wang, X.
(2021). A survey of deep reinforcement learning in
The Evolution of Criticality in Deep Reinforcement Learning
223

recommender systems: A systematic review and fu-
ture directions. arXiv preprint arXiv:2109.03540.
Gu, S., Holly, E., Lillicrap, T. P., and Levine, S. (2016).
Deep reinforcement learning for robotic manipulation.
arXiv preprint arXiv:1610.00633, 1:1.
Huang, S. H., Bhatia, K., Abbeel, P., and Dragan, A. D.
(2018). Establishing appropriate trust via critical
states. In 2018 IEEE/RSJ international conference
on intelligent robots and systems (IROS), pages 3929–
3936. IEEE.
Hubbs, C. D., Li, C., Sahinidis, N. V., Grossmann, I. E., and
Wassick, J. M. (2020). A deep reinforcement learning
approach for chemical production scheduling. Com-
puters & Chemical Engineering, 141:106982.
Hwang, M., Jiang, W.-C., and Chen, Y.-J. (2022). A
critical state identification approach to inverse rein-
forcement learning for autonomous systems. Interna-
tional Journal of Machine Learning and Cybernetics,
13(5):1409–1423.
Ju, S. (2019). Identify critical pedagogical decisions
through adversarial deep reinforcement learning. In
In: Proceedings of the 12th International Conference
on Educational Data Mining (EDM 2019).
Ju, S., Zhou, G., Abdelshiheed, M., Barnes, T., and Chi,
M. (2021). Evaluating critical reinforcement learning
framework in the field. In International conference
on artificial intelligence in education, pages 215–227.
Springer.
Ju, S., Zhou, G., Barnes, T., and Chi, M. (2020). Pick the
moment: Identifying critical pedagogical decisions
using long-short term rewards. International Educa-
tional Data Mining Society.
Karino, I., Ohmura, Y., and Kuniyoshi, Y. (2020). Iden-
tifying critical states by the action-based variance of
expected return. In International Conference on Arti-
ficial Neural Networks, pages 366–378. Springer.
Kumar, R. P., Kumar, I. N., Sivasankaran, S., Vamsi, A. M.,
and Vijayaraghavan, V. (2021). Critical state detection
for adversarial attacks in deep reinforcement learn-
ing. In 2021 20th IEEE International Conference on
Machine Learning and Applications (ICMLA), pages
1761–1766. IEEE.
Leurent, E. (2018). An environment for autonomous
driving decision-making. https://github.com/eleurent/
highway-env.
Li, G., Li, S., Li, S., Qin, Y., Cao, D., Qu, X., and
Cheng, B. (2020). Deep reinforcement learning en-
abled Decision-Making for autonomous driving at in-
tersections. Automotive Innovation, 3(4):374–385.
Lin, Y.-C., Hong, Z.-W., Liao, Y.-H., Shih, M.-L., Liu, M.-
Y., and Sun, M. (2017). Tactics of adversarial attack
on deep reinforcement learning agents. arXiv preprint
arXiv:1703.06748.
Liu, H., Zhuge, M., Li, B., Wang, Y., Faccio, F., Ghanem,
B., and Schmidhuber, J. (2023). Learning to identify
critical states for reinforcement learning from videos.
In Proceedings of the IEEE/CVF International Con-
ference on Computer Vision, pages 1955–1965.
Mnih, V. (2013). Playing atari with deep reinforcement
learning. arXiv preprint arXiv:1312.5602.
Panzer, M. and Bender, B. (2022). Deep reinforcement
learning in production systems: a systematic literature
review. International Journal of Production Research,
60(13):4316–4341.
Raffin, A., Hill, A., Gleave, A., Kanervisto, A., Ernestus,
M., and Dormann, N. (2021). Stable-baselines3: Reli-
able reinforcement learning implementations. Journal
of Machine Learning Research, 22(268):1–8.
Ravi Kiran, B., Sobh, I., Talpaert, V., Mannion, P., Al Sal-
lab, A. A., Yogamani, S., and P
´
erez, P. (2022). Deep
reinforcement learning for autonomous driving: A
survey. IEEE Trans. Intell. Transp. Syst., 23(6):4909–
4926.
Santorsola, A., Maci, A., Delvecchio, P., and Coscia, A.
(2023). A reinforcement-learning-based agent to dis-
cover safety-critical states in smart grid environments.
In 2023 3rd International Conference on Electrical,
Computer, Communications and Mechatronics Engi-
neering (ICECCME). IEEE.
Silver, D., Huang, A., Maddison, C. J., Guez, A., Sifre, L.,
Van Den Driessche, G., Schrittwieser, J., Antonoglou,
I., Panneershelvam, V., Lanctot, M., et al. (2016).
Mastering the game of go with deep neural networks
and tree search. nature, 529(7587):484–489.
Silver, D., Hubert, T., Schrittwieser, J., Antonoglou, I., Lai,
M., Guez, A., Lanctot, M., Sifre, L., Kumaran, D.,
Graepel, T., et al. (2017). Mastering chess and shogi
by self-play with a general reinforcement learning al-
gorithm. arXiv preprint arXiv:1712.01815.
Spielberg, Y. and Azaria, A. (2019). The concept of crit-
icality in reinforcement learning. In 2019 IEEE 31st
International Conference on Tools with Artificial In-
telligence (ICTAI), pages 251–258. IEEE.
Spielberg, Y. and Azaria, A. (2022). Criticality-based ad-
vice in reinforcement learning. In Proceedings of the
Annual Meeting of the Cognitive Science Society, vol-
ume 44.
Westhofen, L., Neurohr, C., Koopmann, T., Butz, M.,
Sch
¨
utt, B., Utesch, F., Neurohr, B., Gutenkunst, C.,
and B
¨
ode, E. (2023). Criticality metrics for automated
driving: A review and suitability analysis of the state
of the art. Archives of Computational Methods in En-
gineering, 30(1):1–35.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
224
