D-PLS: Decoupled Semantic Segmentation for
4D-Panoptic-LiDAR-Segmentation
Maik Steinhauser, Laurenz Reichardt, Nikolas Ebert and Oliver Wasenm
¨
uller
Mannheim University of Applied Sciences, Germany
{m.steinhauser, l.reichardt, n.ebert, o.wasenmueller}@hs-mannheim.de
Keywords:
Lidar, Point Cloud, Panoptic, Segmentation, 3D, Deep Learning, AI.
Abstract:
This paper introduces a novel approach to 4D Panoptic LiDAR Segmentation that decouples semantic and
instance segmentation, leveraging single-scan semantic predictions as prior information for instance segmen-
tation. Our method D-PLS first performs single-scan semantic segmentation and aggregates the results over
time, using them to guide instance segmentation. The modular design of D-PLS allows for seamless integra-
tion on top of any semantic segmentation architecture, without requiring architectural changes or retraining.
We evaluate our approach on the SemanticKITTI dataset, where it demonstrates significant improvements over
the baseline in both classification and association tasks, as measured by the LiDAR Segmentation and Track-
ing Quality (LSTQ) metric. Furthermore, we show that our decoupled architecture not only enhances instance
prediction but also surpasses the baseline due to advancements in single-scan semantic segmentation.
1 INTRODUCTION
Light Detection and Ranging (LiDAR) sensors have
become integral in providing highly accurate spatial
information, enabling the 3D perception of surround-
ings. These capabilities make LiDAR indispensable
in various applications, including autonomous navi-
gation, mapping, robotics, and numerous industrial
processes. The rise of deep learning has further en-
hanced the utility of LiDAR by becoming the de facto
standard for processing its data, allowing for more so-
phisticated interpretation and application.
However, the task of 4D-Panoptic-LiDAR-
Segmentation (Ayg
¨
un et al., 2021), which involves
segmenting LiDAR data at an instance level while
maintaining temporal consistency across multiple
frames, remains less explored compared to traditional
LiDAR segmentation or detection methods. As
such, many new network architectures and training
paradigms in the space are developed for single scan
data only (Thomas et al., 2019; Tang et al., 2020;
Yan et al., 2022; Wu et al., 2024). However, this
task is crucial for applications where understanding
the evolution of objects and environments over
time is essential. In this context, we propose that
semantic classes can serve as prior knowledge to
improve instance segmentation by providing an
initial ”coarse” clustering of points. We introduce
an approach that decouples the task of 4D-Panoptic-
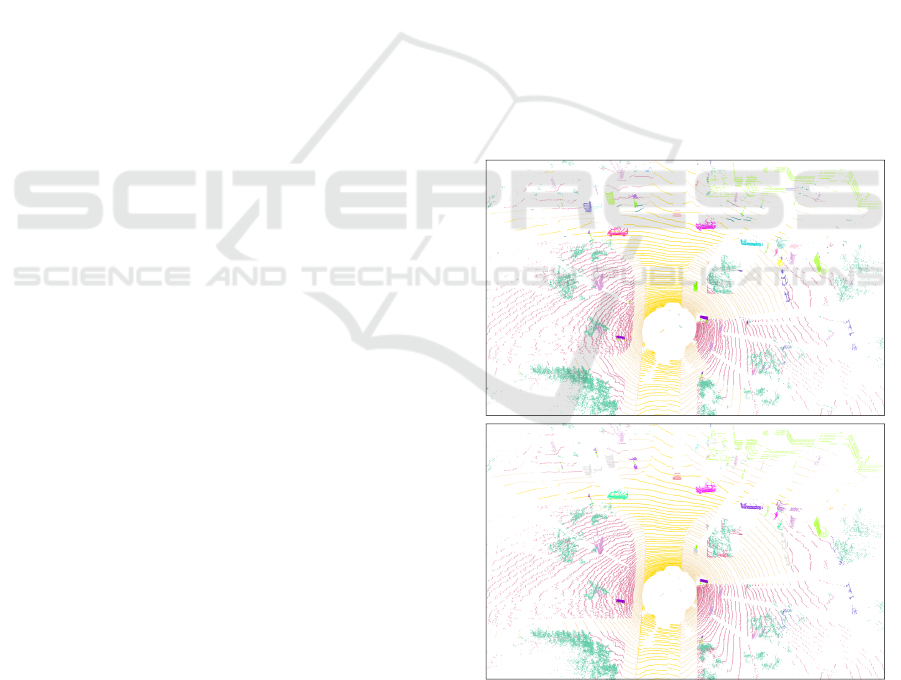
D-PLS (ours)
Ground Truth
Figure 1: Qualitative comparison of our methods (D-PLS)
results when compared to the ground-truth on the Se-
manticKITTI dataset.
LiDAR-Segmentation, first utilizing single scan
semantic predictions as the prior information for
Steinhauser, M., Reichardt, L., Ebert, N. and Wasenmüller, O.
D-PLS: Decoupled Semantic Segmentation for 4D-Panoptic-LiDAR-Segmentation.
DOI: 10.5220/0013114900003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 2: VISAPP, pages
645-650
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
645

the following step of temporal instance segmenta-
tion. Our Decoupled Semantic Segmentation for
4D-Panoptic-LiDAR-Segmentation (D-PLS) sepa-
rates temporal and instance components, offering
a dedicated module on top of existing segmenta-
tion networks for analyzing dynamic environments
through LiDAR data. To assess the performance of
our novel approach, we employ the SemanticKITTI
(Behley et al., 2019) dataset. This dataset provides
LiDAR point clouds and pose data for training,
validation, and testing, and facilitates comparison
with other state-of-the-art networks.
2 RELATED WORK
The field of 4D-Panoptic-LiDAR-Segmentation has
seen significant advancements, with multiple meth-
ods proposed to address the challenges of segmenting
objects at an instance level with temporal consistency.
The foundational work in this area, introduced by 4D-
PLS (Ayg
¨
un et al., 2021), established the 4D panop-
tic segmentation task, along with a framework for its
evaluation. Using known poses from the vehicle ego
motion, 4D-PLS fuses consecutive LiDAR scans into
a unified spatio-temporal point cloud, which under-
goes semantic segmentation. Instance clustering is
performed based on predicted centers through a prob-
abilistic framework.
Subsequent methods have built upon and extended
the 4D-PLS framework. 4D-DS-Net (Hong et al.,
2022) and 4D-StOP (Kreuzberg et al., 2022) are no-
table for their focus on refining the process of cluster-
ing instances by incorporating spatio-temporal prox-
imity. 4D-DS-Net enhances the previous DS-Net
(Hong et al., 2021) model by introducing a dynamic
shifting module that progressively adjusts individual
point coordinates to move towards instance centers
within the spatio-temporal context, ensuring a spatial
separation and thus more accurate clustering. Simi-
lar to our method, 4D-DS-Net decouples the semantic
segmentation branch, but masks the foreground (i.e.
things) classes before passing them to the instance
branch. However, a major drawback of masking is
that it eliminates spatial information and may exclude
or incorrectly include misclassified points. In con-
trast, our method preserves all semantic information,
ensuring the full spatial information in the instance
branch.
4D-StOP, in contrast, adopts a different strategy
by replacing the probabilistic approach of 4D-PLS
with an instance-centric voting mechanism. This
method involves a dual-network structure, where a
voting module predicts the center of each object, and
a proposal module identifies the corresponding points
associated with that center. This voting-based ap-
proach provides a more precise and targeted method
for determining instances over time.
Modifying the 4D-StOP method, Eq-4D-StOP
(Zhu et al., 2023) introduces the concept of rotation
equivariance to the model. By predicting equivariant
fields, this approach ensures that the model remains
robust to rotational variations in the data, thereby im-
proving the accuracy of feature learning. Instance
clustering itself remains similar to 4D-StOP.
Lastly, Mask4D (Marcuzzi et al., 2023) and
Mask4Former (Yilmaz et al., 2024) diverge from
traditional clustering methods by utilizing a mask
transformer-based paradigm. In this approach,
learned queries representing potential instances are
processed by attention-based decoders effectively
merging segmentation and tracking into a single op-
eration. This approach eliminates the need for non-
learned clustering techniques or complex network
structures, instead directly predicting spatio-temporal
instance masks along with their corresponding se-
mantic labels.
While these approaches have shown promising re-
sults, their development is decoupled from the space
of semantic segmentation, with their own specific net-
work architectures. Adapting to the temporal context
of 4D-Panoptic-LiDAR-Segmentation would require
adapting the architecture or at the very least retrain-
ing. In contrast, our work treats semantic segmen-
tation on a single LiDAR scan as a ”pre-clustering”
step, which can provide valuable initial information
for temporal consistency and instance level segmen-
tation.
3 APPROACH
We identify three key insights and limitations in
the current state of the art for 4D-Panoptic-LiDAR-
Segmentation.
Firstly, while semantic segmentation can be seen
as a preliminary step to instance segmentation, where
LiDAR points are initially clustered by class and then
further distinguished as individual instances within
each class, most methods require the network to per-
form both tasks simultaneously, without sharing se-
mantic information that could enhance instance pre-
dictions.
Secondly, the few networks that do use semantic
labels as the first step for instance segmentation typ-
ically only utilize them to mask out non-thing back-
ground classes such as building or vegetation. How-
ever, incorrect semantic predictions in these cases
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
646
Temporal
Aggregation
LiDAR Point Cloud
t = N
LiDAR Point Cloud with
Semantic Prior
t = N
Aggregated 4D-LiDAR
Point Cloud with
Semantic Prior
LiDAR Point Cloud
t = 0
LiDAR Point Cloud with
Semantic Prior
t = 0
Frozen
... ...
Poses
Center Prediction
Semantic Branch
Instance Branch
Refinement
Predicted Offsets
Sampling
Grouping
Clustering
Instance
Predictions
Predicted Centers
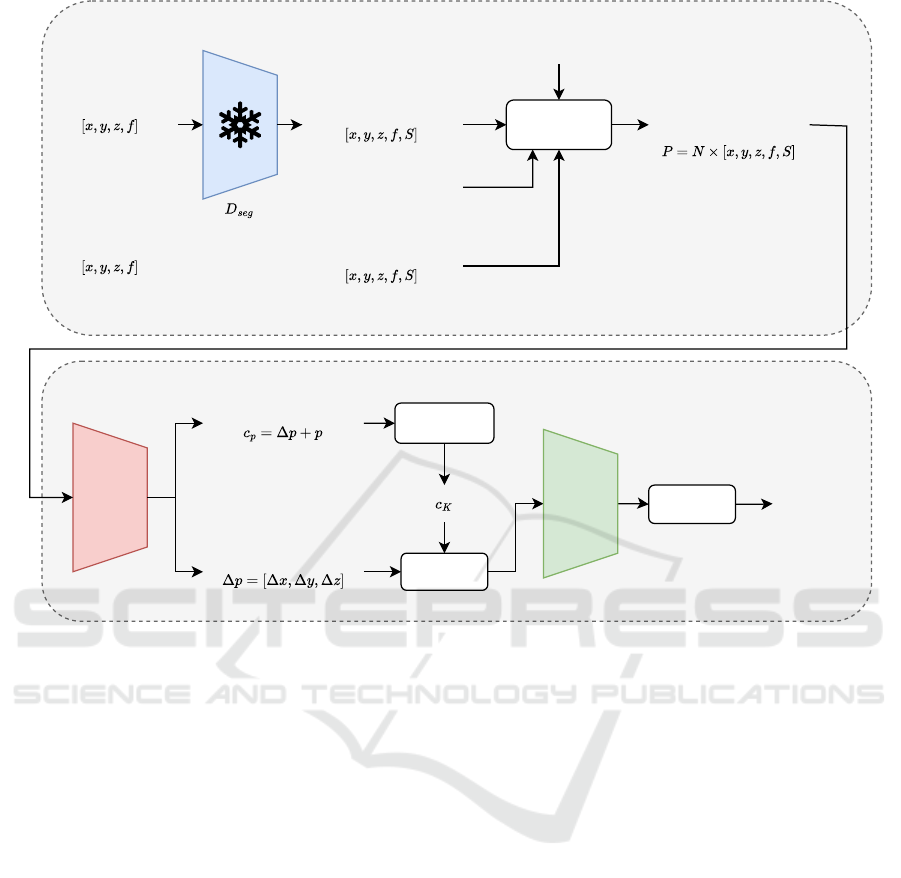
Figure 2: Our method D-PLS decomposes the task of 4D-Panoptic-LiDAR-Segmentation into two modular branches: the sin-
gle scan semantic segmentation branch which provides prior information to the temporally aggregated instance segmentation
branch.
lead to the complete removal of geometric informa-
tion for those points, depriving the instance branch of
potentially valuable data.
Thirdly, developments in 4D-Panoptic-LiDAR-
Segmentation often operate separately from advance-
ments in single-scan Semantic Segmentation, with
each domain focusing on distinct architectures. As
a result, 4D-Panoptic-LiDAR-Segmentation does not
always benefit from improvements in single-scan seg-
mentation.
Our approach addresses these challenges by de-
coupling semantic segmentation from instance seg-
mentation into two distinct steps. First we perform
single-scan semantic segmentation, which acts as a
coarse initial clustering of points. In a second step
wen pass these temporally aggregated semantic re-
sults as prior information to aid in instance segmenta-
tion, without masking out any points. This ensures
that the full geometric information is available for
instance prediction. Thanks to this decoupling, our
method is modular, allowing any semantic segmenta-
tion network to be used as a source of semantic prior
information without requiring architectural changes
or retraining (given that the desired classes remain the
same).
Our method is illustrated in Figure 2. The follow-
ing subsections describe both steps of our method in
detail.
3.1 Semantic Segmentation
Firstly, a pre-trained single scan segmentation net-
work D
seg
predicts semantic labels from point coor-
dinates x, y, z and their features f (usually remission
and/or intensity in LiDAR data) and the predicted
semantic labels S = D
seg
(x, y, z, f ) are appended to
the original point cloud. Then, multiple 3D point
clouds are temporally aggregated over N time steps
using ego-motion data, resulting in a 4D point cloud
P = R
N×[x,y,z, f ,S]
.
For our experiments, we utilize the SPVCNN
(Tang et al., 2020) network variant proposed in
2DPASS (Yan et al., 2022). This network combines
point-based and sparse voxel-based approaches, al-
lowing efficient 3D data processing while maintaining
high resolution and modeling across various receptive
D-PLS: Decoupled Semantic Segmentation for 4D-Panoptic-LiDAR-Segmentation
647

field sizes. The point-based branch preserves high-
resolution data, while the sparse voxel branch ap-
plies Sparse Convolution. These two branches com-
municate through sparse voxelization and devoxeliza-
tion, with trilinear interpolation used for devoxeliza-
tion. Feature fusion occurs by adding outputs from
both branches, enhancing fine details with minimal
computational cost. The 2DPASS variant features a
lightweight decoder composed of trilinear interpola-
tion and MLPs fusing the hierarchical features of the
encoder.
This architecture is particularly effective as it
maintains a pointwise branch while still leveraging hi-
erarchical features in the voxel branch, thus avoiding
the upsampling errors that occur when voxel predic-
tions are directly upsampled as pointwise predictions.
Nonetheless, any semantic segmentation architecture
is compatible with our method. To preserve modular-
ity and independence from specific architectures, we
deliberately avoid using semantic embeddings, limit-
ing the semantic prior information to one-hot predic-
tions or confidence scores.
3.2 Temporal Instance Segmentation
The temporally aggregated 4D point cloud, enriched
with semantic prior information P = R
N×[x,y,z, f ,S]
, is
passed to the instance segmentation branch. Here, the
point cloud is processed by a hierarchical encoder-
decoder architecture based on Kernel Point Convolu-
tion (KP-Conv) (Thomas et al., 2019), which predicts
the offset ∆ p between each point’s p coordinates and
the corresponding instance’s ground truth center co-
ordinate c
gt
. This allows us to coarsely assign each
point to a predicted instance centerc
p
= p + ∆ p. Un-
like 4D-StOP, the KP-Conv network can focus solely
on instance prediction. Following 4D-StOP, we min-
imize the Huber loss between the predicted center
c
p
and the instance center c
gt
. Notably, background
points such as buildings and vegetation are masked
out using the semantic class S, but this masking is
only applied to the loss calculation, not within the net-
work itself.
These coarse predicted centers are further refined
using the instance proposal module from 4D-StOP,
which generates the final instance masks. This mod-
ule first samples and groups the aggregated point
cloud based on the spatial and temporal proximity of
the predicted centers c
p
, using Farthest Point Sam-
pling (FPS) to select K potential instance centers
c
K
⊂ c
p
. Points p are then grouped with these cen-
ters if they fall within a predefined radius. Follow-
ing this grouping, a PointNet-like module (Qi et al.,
2017) with a multi-layer perceptron (MLP) is used
to extract advanced geometric embeddings from the
grouped points. These embeddings are further pro-
cessed by MLPs to predict refined proposal centers,
object radii, and bounding box sizes, the latter serv-
ing as an auxiliary loss to improve aggregation. This
aggregation-loss function, which incorporates errors
in center position, radius, and bounding box dimen-
sions, guides the refinement process.
Finally, DBScan (Ester et al., 1996) clustering is
applied to the learned embeddings, aggregating points
within the same cluster to form the final instance
masks. For each instance, we assign the most fre-
quently occurring semantic label to all points within
the instance.
4 EXPERIMENTS
Our experiments were conducted on the widely used
SemanticKITTI (Behley et al., 2019) dataset, which
is divided into training, validation, and test sets, en-
compassing more than 43K LiDAR scans captured by
a Velodyne HDL-64E laser scanner in diverse urban
settings. Each point within the LiDAR point clouds
is annotated with one of 19 semantic categories (e.g.
car, building, cyclist), and foreground classes also
have a unique instance ID that remains consistent
over time. Additionally, the dataset provides accu-
rate pose estimates for the ego vehicle at each time
step, allowing for the spatial and temporal aggrega-
tion of point clouds, which is crucial for 4D-Panoptic-
LiDAR-Segmentation.
We evaluated our method using the LiDAR
Segmentation and Tracking Quality Metric (LSTQ)
(Ayg
¨
un et al., 2021), which assesses the performance
of 4D panoptic segmentation approaches. The overall
LSTQ metric is computed as the geometric mean of
the classification score S
cls
and the association score
S
assoc
:
LST Q =
p
S
cls
× S
assoc
The classification score S
cls
evaluates the
method’s ability to assign correct semantic labels to
LiDAR points, calculated as the mean intersection
over union (mIoU) across all classes. The associa-
tion score S
assoc
measures the accuracy of instance
tracking throughout the entire LiDAR sequence,
independent of the predicted semantic class. The
geometric mean ensures that strong performance in
both classification and association tasks is necessary
to achieve a high overall LSTQ score.
We refer to our proposed method as D-PLS (De-
coupled Panoptic LiDAR Segmentation). For the se-
mantic prior information, we use the original check-
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
648

Table 1: Ablation study of the components of our method on the SemanticKITTI validation set using N = 2 scans.
One-Hot Semantics Semantic Confidences Auxiliary Semantic Loss LST Q% S
assoc
% S
cls
% IoU
T h
% IoU
St
%
none (Baseline) (Kreuzberg et al., 2022) 58.01 65.50 51.38 45.15 60.86
✓ 69.50 73.00 66.17 69.93 69.45
✓ ✓ 68.71 71.42 66.10 69.75 69.45
✓ 69.26 72.53 66.13 69.84 69.45
✓ ✓ 69.34 72.63 66.20 70.00 69.45
point of the 2DPASS network to generate single-scan
semantic predictions, which are subsequently incor-
porated during the temporal aggregation of the point
cloud. The coarse instance segmentation stage is
trained for 400K iterations before being frozen, fol-
lowed by an additional 150K iterations to train the re-
finement stage.
4.1 Ablation Study
We conducted an ablation study to assess the contri-
bution of each component in our approach. In this
study, 4D-StOP serves as the baseline, predicting both
semantic and instance labels directly from a single
spatio-temporally aggregated point cloud. In con-
trast, our method first predicts single-scan semantic
labels using a semantic network before aggregating
point clouds across multiple time steps. We evaluate
whether this semantic prior information is best added
as one-hot semantics or as semantic confidences.
We also experiment with having the instance stage
of our method being supervised by an auxiliary se-
mantic segmentation loss, in order to further refine
the semantic prior going into the network. The rea-
soning behind this experiment is to determine whether
predicting both semantic and instance information is
detrimental.
Table 1 presents the results, where N = 2 scans
were aggregated spatio-temporally during training
and evaluation. Note that the baseline results dif-
fer from the original 4D-StOP paper, as we reduced
the maximum points per batch to accommodate our
hardware limitations. As a result, both the baseline
and our method were retrained under identical con-
ditions to ensure a fair comparison. Our findings in-
dicate that introducing one-hot semantics as prior in-
formation for instance segmentation results in a clear
improvement in LSTQ compared to the baseline. In
particular, the classification score S
cls
saw significant
enhancement, demonstrating that network architec-
tures and training strategies developed for single-scan
data can be highly beneficial in the context of panop-
tic segmentation. This suggests that future advance-
ments in single-scan segmentation could further im-
prove panoptic segmentation.
Moreover, the use of semantic predictions as prior
information has positively impacted the association
score S
assoc
, leading to improved instance predictions.
Our hypothesis that decoupling semantic and instance
predictions benefits panoptic segmentation is further
supported by the observation that retaining the auxil-
iary semantic loss negatively affects the instance seg-
mentation stage. We use the configuration leading to
the best result for comparison with other state-of-the-
art methods in the next section.
5 COMPARISON WITH STATE OF
THE ART
For our final evaluation, we compared our approach
with the current state-of-the-art methods. Based on
the results from the ablation study in Section 4.1, we
use one-hot semantics as the semantic prior and we
retrained the model with N = 4 spatio-temporally ag-
gregated scans. This setting allows for equal compa-
rability with the state of the art. The results, shown in
Table 2, demonstrate the effectiveness of our method,
which outperforms the state of the art, except for
Mask4D. However, unlike our approach, Mask4D is
not modular, meaning that integrating new develop-
ments from single-scan applications requires adapta-
tions and retraining.
Table 2: Comparison of our method using N = 4 scans com-
pared to others on the SemanticKITTI validation set.
Method LST Q% S
assoc
% S
cls
% IoU
T h
% IoU
St
%
4DPLS (Ayg
¨
un et al., 2021) 59.86 58.79 60.95 64.96 63.06
CA-Net (Marcuzzi et al., 2022) - 72.90 - - -
4DStOP (Kreuzberg et al., 2022) 66.40 71.80 61.40 64.90 64.10
Eq-4D-PLS (Zhu et al., 2023) 65.00 67.70 62.30 64.60 66.40
4D-DS-Net (Hong et al., 2022) 68.00 71.30 64.80 64.50 65.30
Mask4D (Marcuzzi et al., 2023) 71.40 75.40 67.50 65.80 69.90
Eq-4D-StOP (Zhu et al., 2023) 70.10 77.60 63.40 67.10 66.40
Mask4Former (Yilmaz et al., 2024) 70.50 74.30 66.90 67.10 66.60
ours 70.49 74.87 66.36 70.40 69.45
Our method shows a substantial improvement
over the baseline 4D-StOP, confirming the viability
of decoupling semantic segmentation from instance
mask prediction. This concept could also be applied
to methods like Mask4D, with further improvements
possible by incorporating recent advancements in se-
mantic segmentation networks such as Point Trans-
former V3 (Wu et al., 2024). We leave this for fu-
ture research. Notably, when compared to 4D-DS-Net
which uses semantic results to mask out points prior
to instance refinement, our method performs better,
indicating that our approach of not using semantic
masking in the instance branch leads to better results.
D-PLS: Decoupled Semantic Segmentation for 4D-Panoptic-LiDAR-Segmentation
649

6 CONCLUSION
This paper introduces a novel two-stage approach
to 4D Panoptic Lidar Segmentation by decoupling
single-scan semantic and multi-scan instance segmen-
tation tasks. Our D-PLS framework leverages se-
mantic predictions as a coarse form of clustering and
prior information to aid in instance segmentation, sig-
nificantly outperforming the baseline, while offering
a modular and flexible solution. D-PLS capitalizes
on pretrained networks from the well-explored do-
main of single-scan semantic segmentation to sup-
ply these prior predictions, making it adaptable to a
wide range of architectures. Future work will ex-
plore extending our approach to diverse semantic and
panoptic networks. We validated our results using the
SemanticKITTI dataset, and aim to further advance
this research by incorporating label-efficient LiDAR
segmentation techniques (Reichardt et al., 2023), in-
stance specific augmentation (Reichardt et al., 2024)
and motion information (Rishav et al., 2020).
ACKNOWLEDGEMENTS
This work was funded by the German Federal
Ministry for Economic Affairs and Climate Action
(BMWK) under the grant SERiS (KK5335502LB3).
REFERENCES
Ayg
¨
un, M., Osep, A., Weber, M., Maximov, M., Stachniss,
C., Behley, J., and Leal-Taixe, L. (2021). 4D Panoptic
Segmentation. In Conference on Computer Vision and
Pattern Recognition (CVPR).
Behley, J., Garbade, M., Milioto, A., Quenzel, J., Behnke,
S., Stachniss, C., and Gall, J. (2019). SemanticKITTI:
A Dataset for Semantic Scene Understanding of Li-
DAR Sequences. In International Conference on
Computer Vision (ICCV).
Ester, M., Kriegel, H.-P., Sander, J., Xu, X., et al. (1996).
A density-based algorithm for discovering clusters in
large spatial databases with noise. In KDD.
Hong, F., Zhou, H., Zhu, X., Li, H., and Liu, Z. (2021).
Lidar-based panoptic segmentation via dynamic shift-
ing network. In Conference on Computer Vision and
Pattern Recognition (CVPR).
Hong, F., Zhou, H., Zhu, X., Li, H., and Liu, Z. (2022).
Lidas-based 4d panoptic segmentation via dynamic
shifting network. arXiv preprint arXiv:2203.07186.
Kreuzberg, L., Zulfikar, I. E., Mahadevan, S., Engelmann,
F., and Leibe, B. (2022). 4d-stop: Panoptic segmenta-
tion of 4d lidar using spatio-temporal object proposal
generation and aggregation. In European Conference
on Computer Vision (ECCV).
Marcuzzi, R., Nunes, L., Wiesmann, L., Marks, E., Behley,
J., and Stachniss, C. (2023). Mask4d: End-to-end
mask-based 4d panoptic segmentation for lidar se-
quences. Robotics and Automation Letters (RA-L).
Marcuzzi, R., Nunes, L., Wiesmann, L., Vizzo, I., Behley,
J., and Stachniss, C. (2022). Contrastive instance
association for 4d panoptic segmentation using se-
quences of 3d lidar scans. Robotics and Automation
Letters (RA-L).
Qi, C. R., Su, H., Mo, K., and Guibas, L. J. (2017). Pointnet:
Deep learning on point sets for 3d classification and
segmentation. In Conference on Computer Vision and
Pattern Recognition.
Reichardt, L., Ebert, N., and Wasenm
¨
uller, O. (2023). 360
◦
from a single camera: A few-shot approach for lidar
segmentation. In International Conference on Com-
puter Vision Workshop (ICCVW).
Reichardt, L., Uhr, L., and Wasenm
¨
uller, O. (2024).
Text3daug – prompted instance augmentation for lidar
perception. In International Conference on Intelligent
Robots and Systems (IROS).
Rishav, R., Battrawy, R., Schuster, R., Wasenm
¨
uller, O., and
Stricker, D. (2020). Deeplidarflow: A deep learning
architecture for scene flow estimation using monocu-
lar camera and sparse lidar. In IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS).
Tang, H., Liu, Z., Zhao, S., Lin, Y., Lin, J., Wang, H.,
and Han, S. (2020). Searching efficient 3d architec-
tures with sparse point-voxel convolution. In Euro-
pean Conference on Computer Vision (ECCV).
Thomas, H., Qi, C. R., Deschaud, J.-E., Marcotegui, B.,
Goulette, F., and Guibas, L. J. (2019). Kpconv: Flex-
ible and deformable convolution for point clouds. In
International Conference on Computer Vision (ICCV).
Wu, X., Jiang, L., Wang, P.-S., Liu, Z., Liu, X., Qiao, Y.,
Ouyang, W., He, T., and Zhao, H. (2024). Point trans-
former v3: Simpler faster stronger. In Conference on
Computer Vision and Pattern Recognition (CVPR).
Yan, X., Gao, J., Zheng, C., Zheng, C., Zhang, R., Cui, S.,
and Li, Z. (2022). 2dpass: 2d priors assisted seman-
tic segmentation on lidar point clouds. In European
Conference on Computer Vision (ECCV).
Yilmaz, K., Schult, J., Nekrasov, A., and Leibe, B. (2024).
Mask4former: Mask transformer for 4d panoptic seg-
mentation. In International Conference on Robotics
and Automation (ICRA).
Zhu, M., Han, S., Cai, H., Borse, S., Ghaffari, M., and
Porikli, F. (2023). 4d panoptic segmentation as invari-
ant and equivariant field prediction. In International
Conference on Computer Vision (ICCV).
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
650
