
Hands-Free VR
Jorge Askur Vazquez Fernandez
1,2,∗
, Jae Joong Lee
1,∗
, Santiago Andr
´
es Serrano Vacca
2
,
Alejandra Magana
3
, Radim Pe
ˇ
sa
4
, Bedrich Benes
1
and Voicu Popescu
1
1
Department of Computer Science, Purdue University, West Lafayette, U.S.A.
2
School of Engineering and Science, Tecnol
´
ogico de Monterrey, Monterrey, Mexico
3
Department of Computer and Information Technology, Purdue University, West Lafayette, U.S.A.
4
Department of Informatics and Computers, Ostravska Universita, Ostrava, Czech Republic
Keywords:
Virtual Reality, Large Language Model, Retrieval-Augmented Generation, Speech-to-Text, Deep Learning.
Abstract:
We introduce Hands-Free VR, a voice-based natural-language interface for VR that allows interaction without
additional hardware just using voice. The user voice command is converted into text using a fine-tuned speech-
to-text deep-learning model. Then, the text is mapped to an executable VR command using an LLM, which is
robust to natural language diversity. Hands-Free VR was evaluated in a within-subjects study (N = 22) where
participants arranged objects using either a conventional VR interface or Hands-Free VR. The results confirm
that Hands-Free VR is: (1) significantly more efficient than conventional VR interfaces in task completion time
and user motion metrics; (2) highly rated for ease of use, intuitiveness, ergonomics, reliability, and desirability;
(3) robust to English accents (20 participants were non-native speakers) and phonetic similarity, accurately
transcribing 96.7% of voice commands, and (3) robust to natural language diversity, mapping 97.83% of
transcriptions to executable commands.
1 INTRODUCTION
Virtual reality (VR) provides users powerful immer-
sive visualizations of complex virtual environments
(VEs). One of VR’s great strengths is its natural in-
terface for specifying the desired view based on track-
ing the user’s head position and orientation. However,
conventional VR interfaces are not equally effective
when allowing users to configure, search, or mod-
ify the VE. Canonical tasks such as object creation,
search, and selection, which are building blocks of
complex interactions, often require repeated and te-
dious attempts to invoke, activate, tune, and undo op-
erations through interface constructs that can be un-
familiar and unintuitive to the user. These challenges
compound when applying the same command to mul-
tiple objects, such as isolating objects of a certain type
or arranging objects in a specific configuration.
Conventional VR interfaces often adapt non-
immersive controls to virtual environments, resulting
in inefficiencies. For example, the familiar mouse
becomes a 3D laser pointer that must be aimed pre-
cisely in mid-air without the haptic feedback provided
by the physical stability of a desk, making fine ob-
ject selection difficult. Additionally, while modern
*
These authors contributed equally to this work.
VR headsets feature built-in tracking that removes lo-
cation constraints, navigating large virtual spaces in
smaller physical areas remains challenging. It can re-
quire complex, disorienting solutions like redirection.
Although VR can replicate non-immersive
controls-such as offering a 2D display + mouse
interface or a deeply nested floating menu—these
options break immersion and hinder the workflow.
VR-specific interfaces (Section 2) improve efficiency
but lose the familiarity of traditional controls.
Recent large language models (LLMs) handle
complex language so effectively that their users can
say what they want, and the LLM translates their
words into executable code. This voice-to-code ap-
proach reduces inefficiency and frustration in VR con-
trols, and as LLM-based code generation improves,
these benefits become increasingly accessible.
This paper introduces Hands-Free VR, a voice-
based VR interface. The user issues a natural-
language voice command, a speech-to-text model for
diverse English accents, and converts to text. An
LLM then maps it to a unique executable VR com-
mand. Both models run on a workstation connected
wirelessly to the headset. Compared to conventional
VR controls that force users to walk around to select
and arrange objects repeatedly, Hands-Free VR en-
ables isolating and arranging them in fewer steps via
Vazquez Fernandez, J. A., Lee, J. J., Serrano Vacca, S. A., Magana, A., Peša, R., Benes, B. and Popescu, V.
Hands-Free VR.
DOI: 10.5220/0013115100003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 1: GRAPP, HUCAPP
and IVAPP, pages 533-542
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
533
00:53
00:08
00:13
Our
voice based
UI
Conventional UI
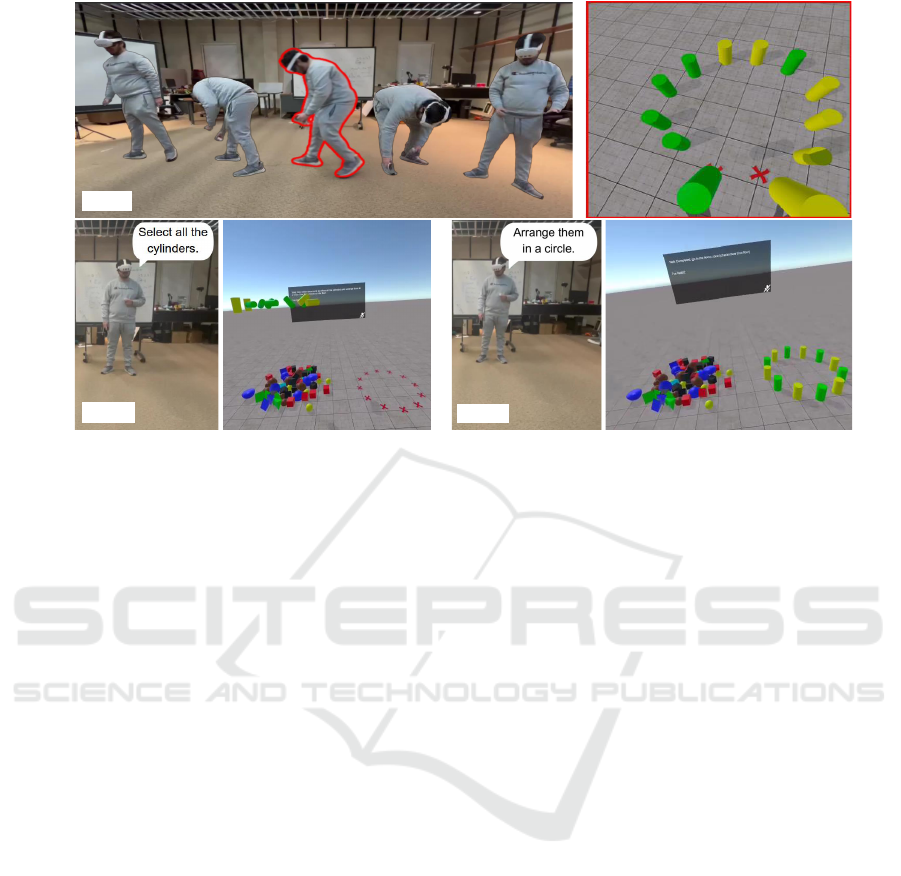
Figure 1: Conventional interface versus our Hands-Free VR. The task is to find all cylinders in a pile of objects and place them
in a circle. With the conventional interface, the user has to walk to grab each cylinder and place it, needing 53s to complete
the task. With our voice-based interface, the user first selects all the cylinders and then places them in a circle, using natural
language spoken commands, completing the task in 13s.
voice commands (see Figure 1 and the video).
We evaluated Hands-Free VR in a controlled
within-subjects study with 22 participants, approved
by our Institutional Review Board (IRB). Participants
completed object-finding and arrangement tasks us-
ing either a conventional VR interface (grab, carry,
drop) or Hands-Free VR. With 20 participants be-
ing non-native English speakers, Hands-Free VR still
achieved high accuracy: it correctly transcribed voice
commands 96.71% of the time and converted them
into executable VR commands 97.83% of the time,
demonstrating robustness to accents, phonetic simi-
larities, and natural language diversity.
We do not advocate using voice commands exclu-
sively in VR. In applications where physical action is
essential, voice should not bypass core interactions.
However, we do believe voice can free users from te-
dious, repetitive, and non-essential tasks that hinder
the application’s main purpose. We claim the follow-
ing contributions:
1. Hands-Free VR is a voice-based VR interface that
is efficient and robust to diverse accents, phonetic
similarities, and language variations.
2. A robust speech-to-text deep learning to accents.
3. A Large Language Model with Retrieval Aug-
mented Generation for custom VR commands.
2 RELATED WORK
We review prior work on conventional VR interfaces
that do not rely on the user’s voice and voice-based
VR user interfaces.
Conventional VR User Interfaces. Interactions in
VR have unique challenges for many user interface
tasks (Mine, 1995), and we limit the discussion to se-
lection and text entry: tasks relevant to our study.
Selection is a challenging VR interaction task that
has been extensively studied (Argelaguet and Andu-
jar, 2013). Users select targets using a virtual ray (An-
dujar and Argelaguet, 2007; Steinicke et al., 2006) or
directly with their hands (Ware, 1990; Han and Wan,
2010). A key challenge is the 3D visibility discrep-
ancy between the user’s eyes and hand (Argelaguet
et al., 2008), where some visible targets may be un-
reachable from a natural hand position. In cluttered
scenes, selection volumes instead of rays (Forsberg
et al., 1996; Pierce et al., 1997) help by reducing the
precision required to select small or occluded targets.
Our voice-based interface complements VR selection
methods, allowing users to select objects based on
known features, regardless of size or occlusion.
Text entry is a notoriously difficult problem in VR,
as typing on air keyboards is slow, inaccurate, and tir-
ing. Innovative solutions have been proposed to ad-
dress this issue, such as the implementation of vir-
tual QWERTY keyboard layouts controlled using fin-
HUCAPP 2025 - 9th International Conference on Human Computer Interaction Theory and Applications
534
ger and thumb gestures (Fashimpaur et al., 2020), or
such as the attachment of customized keycaps to the
VR headset (Hutama et al., 2021). Our deep learning
speech-to-text solution offers intuitive operation and
robustness to various accents and has the potential to
support text entry by dictation.
Voice-Based VR User Interfaces. Voice assistants
enhance VR applications like retail (Morotti et al.,
2020), offering greater efficiency and user preference
over traditional GUIs (Buchta et al., 2022c; Buchta
et al., 2022b). Our work uses LLM advancements to
increase user freedom and interface robustness.
Navigation in VR benefits from voice interfaces,
enabling users to teleport to distant virtual locations
without physical movement (Hombeck et al., 2023;
Calandra et al., 2022). Natural Language Understand-
ing (Zhao et al., 2020) simplifies interaction by re-
moving the need for complex commands. Our work
builds on this, fine-tuning a state-of-the-art speech-
to-text model (Radford et al., 2023) with 13 English
accents and demonstrating our voice-based interface
for selection, posing, and navigation tasks.
Conversation highlights the power of voice-based
interfaces, as reviewed in (G
¨
obl. et al., 2021).
Recent LLMs like GPT-3 (Brown et al., 2020),
PaLM (Chowdhery et al., 2022), LLaMA (Touvron
et al., 2023), and ChatGPT (OpenAI, 2022) enable
robust language understanding. Our work utilizes
LLMs to map user commands to VR actions, focus-
ing on robustness over conversation, and generates di-
verse language variants of VR commands offline.
Object manipulation in VR via voice has been
introduced in CAD (Chu et al., 1997) and distant ob-
ject interaction (Whitlock et al., 2018). Our approach
removes the need to memorize commands, allowing
users to describe intentions in their words using an
LLM, though it does not enable instant interpretation.
The interface is crucial to the user’s VR expe-
rience. Voice interfaces free the user’s hands for
tasks (Monteiro et al., 2021) and are often preferred
over GUIs, which feel tedious (Buchta et al., 2022a).
Hands-Free VR enables intuitive interaction without
memorizing or practicing predefined commands.
3 OVERVIEW
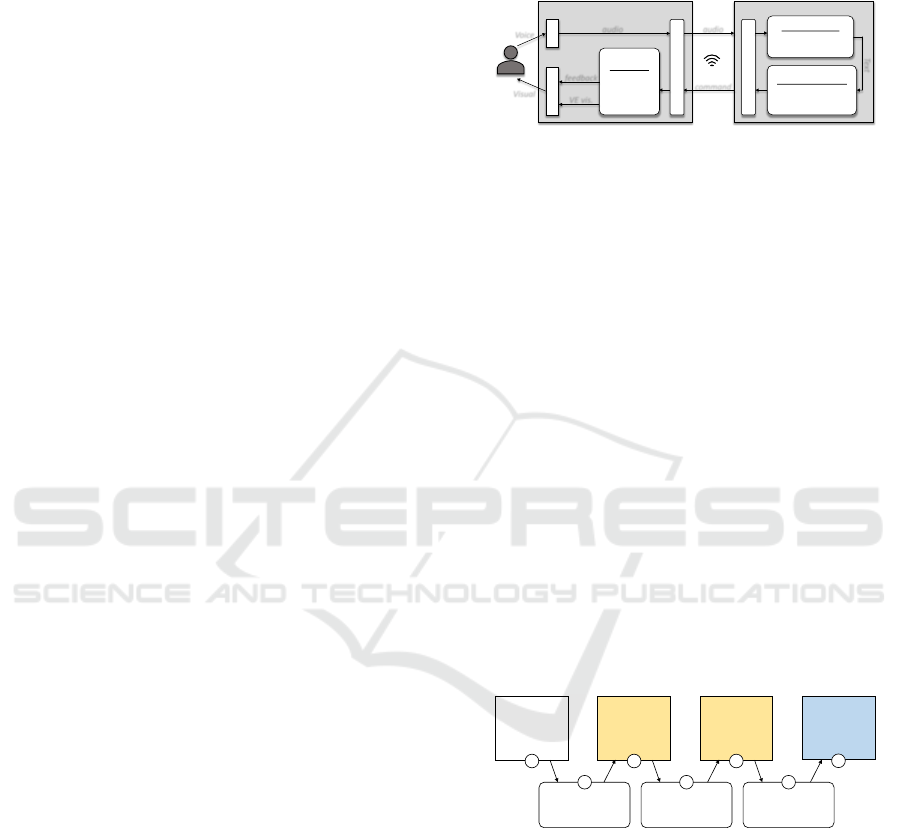
The pipeline of Hands-Free VR is given in Figure 2.
The user speaks a command, the VR headset captures
their voice, and an edge server receives the audio data
wirelessly and converts them to text with a robust
deep learning model in diverse English accents and
phonetic similarity to words. Next, a large language
model (LLM) maps the transcribed text to executable
VR commands using Retrieval-Augmented Genera-
tion (RAG) (Lewis et al., 2021) as shown in Section 4.
The command is sent back to the VR headset and then
is executed in the application.
Audio
Voice
VR Headset
Mic
Execution
State update
Feedback
Rendering
Displays
Edge Server
Text to command
LLM synonym
enumeration & parsing
audio
VE vis.
Visual
command
Speech to text
Accent robustness
Context tuning
feedback
Text
Networking Interface
audio
Networking Interface
Figure 2: Hands-Free VR pipeline.
4 ROBUST SPEECH TO
COMMAND CONVERSION
Understanding user intentions is important for a ro-
bust voice-based VR interface. This requires accurate
handling of accents, phonetic similarities, and map-
ping free-form text into executable commands. Here,
we detail our approach to ensuring speech-to-text and
text-to-command robustness.
4.1 Data Synthesis for Robustness
Enhancement
In the first offline step, our approach synthesizes data
to support the robustness of speech-to-text and text-
to-command. The data synthesis pipeline (Figure 3)
proceeds in reverse order compared to the run-time
order: data synthesis starts from the syntax and lexi-
con (1) and generates a set of natural language and a
set of accent-diversified audio files (7).
VR command
lexicon and
syntax
1
Diversified
verbal
commands
(audio)
7
Executable
commands
(text)
3
Verbal
commands
(text)
5
Exhaustive
instantiation
2
Text to accented
speech
6
Extensive NL
instantiation
4
Figure 3: Text (yellow) and audio (blue) synthesis data to
support robust speech-to-text and text-to-command conver-
sion. The data is used as shown in Fig. 4.
The VR application’s syntax and lexicon are
used to generate all possible executable commands
by assigning values to syntactic elements like
verbs, objects, and attributes (e.g., select(Cube), se-
lect(Pyramid, yellow), arrange(row)). Each com-
mand is input into ChatGPT (OpenAI, 2022), which
generates tens of natural language variants. These
verbal commands are converted to speech using Ama-
zon Polly (Amazon, 2016), producing tens of thou-
sands of audio files with diverse expressions and 13
Hands-Free VR
535

Accent Robustness
Fine-tuning
Speech-to-text
Deep Learning Model
5
7
Text -to-command
LLM
Instructor
Embedding
Embedding
Index
command
speech
RAG
3
5
Offline
Online
Figure 4: Speech-to-text and text-to-command robustness
through fine-tuning and through Retrieval Augmented Gen-
eration (RAG) using the command text and audio data gen-
erated as shown in Fig. 3.
English accents.
The selection, relocation, and arrangement tasks
of our user study (Section 6) are covered by a lexi-
con with 5 verbs, 5 objects, and 12 attributes (9 col-
ors and 3 types of alignment), and by a syntax with
sentences with just a verb, with a verb and an ob-
ject, and with a verb, an object, and an attribute.
Syntax and lexicon instantiation produced 66 exe-
cutable commands. The 66 executable commands
seeded 2,253 natural language variants, for an av-
erage of 34.14±10.52 variants per executable com-
mand. The minimum, median, and maximum vari-
ants per executable command are 4, 40, and 66, re-
spectively. The 2,253 variants were converted from
text to accented speech, resulting in 29,237 audio
files. We refer the reader to the supplemental material
FineTuningData.zip, which maps executable com-
mands to natural language variants and audio files.
4.2 Robustness Enhancement
The synthesized data is used to improve (a) the
speech-to-text and (b) the text-to-command conver-
sion as shown in Figure 4.
(a) The English command in text form (in-
put 5 in Figure 3) and the diversified English com-
mands in audio form (7 in Figure 3) are used
to fine-tune the Whisper (Radford et al., 2023)
speech-to-text deep learning model using 5,000 it-
erations on our audio files, instead of training
from scratch to utilize pre-trained dataset knowl-
edge. (b) The (English command, executable com-
mand) pairs are used for Retrieval Augmented Gen-
eration (RAG) (Lewis et al., 2021) with a pre-trained
LLM (Chung et al., 2022) and embedding (Su et al.,
2023). The embedding space is trained on instruc-
tion tasks, so we put our data in an instruction-
like text format to use the embedding space (Su
et al., 2023) as “ special command of {English
command} is {executable command}”.
4.3 Speech-to-Command Conversion
At run-time, the user gives a verbal command such
as “select all red boxes”. The command is con-
verted to a text command by the speech-to-text deep
learning model, with robustness to the user’s spo-
ken English accent and to words with similar sounds,
e.g., preferring “boxes” to “foxes”. The text com-
mand is interpreted by the LLM, which locates within
its latent space the executable VR command that
best aligns with the intended action. The LLM is
queried with the text-based prompt “what is the
special command of {text command}?”. In this
example, the LLM replies with the executable com-
mand, i.e., “select(cube, red)”. Finally, the VR
command is executed.
5 IMPLEMENTATION
The edge server (Figure 2) has an Intel i9-12900k
4.8GHz CPU, 128GB RAM, and NVIDIA RTX3090
GPU using Python 3.9 and PyTorch 2.0.1. The client
is on a Meta Quest 3 (Meta, 2013) VR headset. The
VR application is in Unity 3D (Li et al., 2018), ver-
sion 2021.3.8f1. The server and client were connected
with a 6E Wi-Fi.
The speech-to-text model is fine-tuned based on
Whisper (Radford et al., 2023) with 29,237 audio
files covering 13 different English accents. We use a
mixed-precision floating point, AdamW (Loshchilov
and Hutter, 2017), using a batch size 32 with a 10
−5
learning rate. The well-known speech-to-text model
metric, the word error rate, is used as our evaluation.
The Hands-Free VR text-to-command model
combines LLM (Chung et al., 2022) with In-
structor (Su et al., 2023) embedding space, di-
recting multiple words (English language com-
mand) to one word (executable command), by uti-
lizing RAG (Lewis et al., 2021) for its cost-
effectiveness and customization. We formulate data
for prompt augmentation by combining possible com-
mands from users and their corresponding executable
commands as “ special command of {text} is
{command}” with a vector database (chromadb,
2022).
special command is a unique identifier
for our specific task to avoid any overlap with data
from the original training dataset. Once the user’s
voice command was converted to text, we queried the
user’s question to the embedding as “What is the
special command of {text}?”, and we retrieved
from the LLM the most relevant answer, i.e., the
executable command, using LangChain (LangChain,
2022). We apply 4-bit quantization (Tim Dettmers,
HUCAPP 2025 - 9th International Conference on Human Computer Interaction Theory and Applications
536

2022) to the LLM to fit the 24GB VRAM GPU.
6 USER STUDY
We conducted an IRB-approved user study comparing
Hands-Free VR to a conventional VR interface.
6.1 Methods
Participants. We have recruited N = 22 participants
from our university. The study included 13 partici-
pants aged 18-25, 8 aged 26-30, and 1 over 30. Four
identified as women, 17 as men, and 1 chose an al-
ternative option. No participants identified as “Be-
ginner” in English; 4 were “Intermediate,” 16 “Ad-
vanced,” and 2 “Native Speakers.” One listed English
as their native language, 5 Mandarin, 4 Hindi, and 12
chose “Other”.
Study Design. We opted for a within-subjects study
design, with each participant performing the tasks in
each condition. The design brings the advantage of
greater statistical power for fewer participants. The
learning effects are minor, as the two interfaces are
substantially different from each other. The N =
22 participants are sufficient to detect effects of a
large/very large size (i.e., Cohen’s d = 1.0) with 0.90
power at a significance level α = 0.05.
Tasks. Participants performed two tasks: In Task
1 (T1), they moved a subset of 96 virtual objects
(spheres, hemispheres, pyramids, cubes, and cylin-
ders) from a pile to a nearby box (1 m away). Objects
were 10 cm tall, randomly colored, and the box mea-
sured 100 cm × 100 cm × 100 cm. In Task 2 (T2),
they arranged objects from the pile into a row, matrix,
or circular pattern, guided by red crosses on the floor,
2 m from the pile.
Conditions. In the control condition (CC), partici-
pants used a conventional VR interface to manipulate
objects with handheld controllers (Figure 5). They
grabbed objects by pressing and holding the trigger
button, releasing it to drop the object. Gravity and
collision allowed objects to fall above the T1 box, and
both hands could carry two objects at once (Figure 5).
In the experimental condition (EC), participants used
Hands-Free VR interface (Figure 6), pressing the trig-
ger button to issue voice commands and releasing it to
confirm. In both conditions, participants selected ob-
jects before placing them in the box (T1) or on the
floor (T2).
Data Collection. We collected data to assess Hands-
Free VR’s robustness and compare it to the conven-
tional VR interface using objective and subjective
metrics. Objective metrics included task completion
time (seconds), cumulative viewpoint translation (me-
ters), view direction rotation (degrees), and controller
translations. Subjective data came from a user prefer-
ence questionnaire with five questions:
Q1 The interface is tedious. It requires a lot of work.
Q2 The interface is intuitive. I quickly figured out
how to use it.
Q3 The interface requires a lot of physical effort.
Q4 The interface is unreliable, it often does the wrong
thing.
Q5 I would love to have a similar interface on my
computer.
Responses were on a five-point Likert scale,
scored from 1 to 5. For negative questions (Q1, Q3,
Q4), scores were reversed (x replaced with 6 − x) so
higher scores always indicated better outcomes. Re-
search Hypotheses. We hypothesized that Hands-
Free VR is robust, more efficient than a conventional
VR interface, and preferred by users.
RH1: Hands-Free VR is robust, with an overall spo-
ken command success rate s
STC
of over 90%, i.e.,
s
STC
> 0.90.
RH2: Participants complete both tasks faster, with
less viewpoint translation, with less view direc-
tion rotation, and with less hand translation when
using the Hands-Free VR interface than when us-
ing the conventional VR interface.
RH3: Participants find that the Hands-Free VR in-
terface is less tedious and requires less physical
effort than the conventional VR interface and that
Hands-Free VR is intuitive and reliable.
Procedure. Participants completed a demographics
questionnaire, practiced each task in both conditions,
Figure 5: Control condition, task 2: The left column shows
the participant’s VR view as they collect two yellow cylin-
ders (top) and place them in a circular pattern marked by
red crosses (bottom).
Hands-Free VR
537
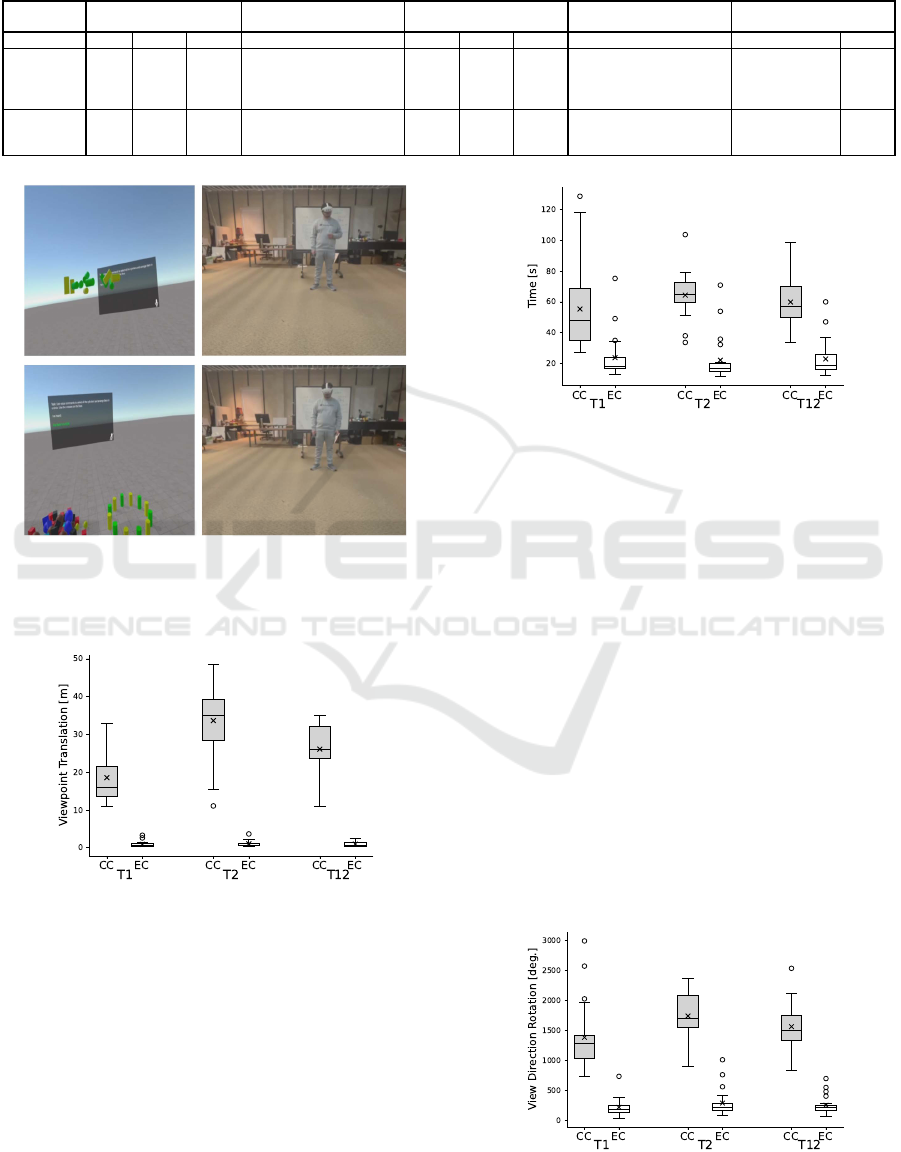
Table 1: Descriptive and inference statistics for the five objective metrics, considering the two tasks separately (T1 and T2),
and together (T12), and for the conventional (CC) and Hands-Free VR (EC) conditions. In all instances, EC has a significant
efficiency advantage over CC (p < 0.05).
Metric
Time
[s]
Viewpoint Translation
[m]
View Rotation
[deg]
Left Hand Translation
[m]
Right Hand Translation
[m]
Task T1 T2 T12 T1 T2 T12 T1 T2 T12 T1 T2 T12 T1 T2 T12
CC 55.44 64.47 59.95 18.56 33.67 26.12 1,385 1,740 1,562 12.75 14.89 13.82 12.67 13.60 13.14
Mean
EC 23.76 22.16 22.96 0.91 1.04 0.97 224 294 259 1.16 1.44 1.30 0.99 1.07 1.03
CC 27.56 14.63 16.93 6.07 9.57 6.57 584 399 401 4.86 3.83 3.67 4.81 3.49 3.20
Std.dev.
EC 14.69 14.90 11.79 0.78 0.82 0.64 153 227 156 0.87 1.29 0.84 0.84 0.79 0.69
Z -3.95 -4.01 -4.01 -4.01 -4.01 -4.01 -4.01 -4.01 -4.01 -4.01 -4.01 -4.01 -4.01 -4.01 -4.01
Wilcoxon
p 0.00008 <0.00001 <0.00001 <0.00001 <0.00001 <0.00001 <0.00001 <0.00001 <0.00001 <0.00001 <0.00001 <0.00001 <0.00001 <0.00001 <0.00001
Cohen’s d 1.43 2.87 2.54 4.08 4.80 5.39 2.72 4.46 4.28 3.32 4.71 4.70 3.38 4.95 5.23
Figure 6: Experimental condition, task 2. The user says
“Grab all the cylinders”, which are lifted from the pile of
objects (top), and then the user says “Put them in the circle”
for arranging the cylinders on the floor (bottom).
Figure 7: Viewpoint translation comparison.
and then performed three trials per task in both con-
ditions, in a counterbalanced order. They completed
a preference questionnaire via VR headset after each
condition. The 30-minute experiment concluded with
participants receiving a USD 20 gift card.
Data Analysis. We analyzed the data using de-
scriptive (tables, box plots) and inferential statis-
tics with appropriate tests with SPSS (IBM Corp.,
2022). Normality was checked via the Shapiro-Wilk
test (Shapiro and Wilk, 1965). Depending on normal-
ity, we used either the dependent t-test or the non-
Figure 8: Task completion time between conditions.
parametric Wilcoxon signed-rank test (Wilcoxon,
1992), suitable for our paired sample design. The
Wilcoxon test handled continuous (objective metrics)
and ordinal data (Likert scale responses). We set sig-
nificance at α = 0.05 and calculated effect sizes using
Cohen’s d (Cohen, 2013) to assess statistical power.
6.2 Results and Discussion
Hands-Free VR Robustness: We measured the ro-
bustness of Hands-Free VR over all 359 verbal com-
mands issued by our study participants. The speech-
to-text conversion success rate s
ST T
= 96.71 ±0.05%,
the text-to-command success rate s
T TC
= 97.83 ±
0.07%, for an overall verbal command success rate
of s
STC
= s
ST T
× s
T TC
= 94.61%. This supports RH1,
i.e., Hands-Free VR is robust, including with the spo-
ken English accents of our participants, 20 of whom
were not native English speakers.
Hands-Free VR vs. Conventional Interface. The
Figure 9: View direction rotation between conditions.
HUCAPP 2025 - 9th International Conference on Human Computer Interaction Theory and Applications
538
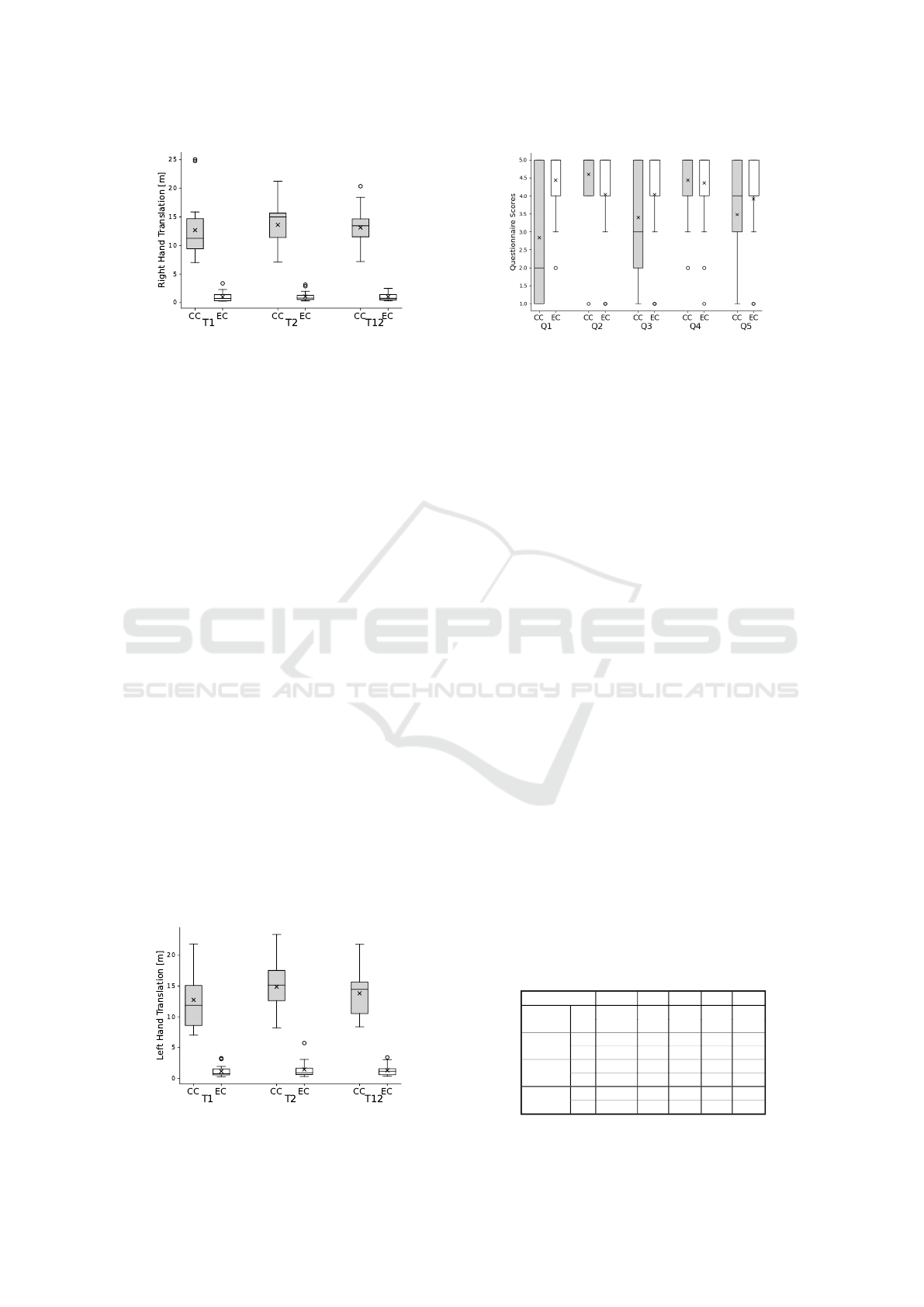
Figure 10: Right-hand translation between conditions.
interface efficiency measurements according to the
five objective metrics are presented numerically in Ta-
ble 1, and graphically, using box plots, in Figures 7
to 11.
In the box plots, the black line represents the
median, the cross the mean, the bar spans the in-
terquartile range (q
1
to q
3
), whiskers show the range
(q
1
± 1.5 × (q
3
− q
1
)), and dots mark outliers outside
this range. Hands-Free VR enabled faster task com-
pletion with less walking, head rotation, and hand
movement. The advantage was significant for T1 and
even greater for T2, as the conventional VR inter-
face required precise object placement for T2, while
Hands-Free VR made both tasks equally simple with
verbal commands.
With Hands-Free VR, each task required two ver-
bal commands: one for selection and one for place-
ment. Commands were executed in 1.51 seconds on
average: 0.99 ± 0.009s for speech-to-text and 0.51±
0.017s for text-to-command conversion—much faster
than Quest’s built-in STT (2.29s per API call) Task
completion time (e.g., 22 s for T2) was mostly spent
reading task descriptions, and users had an improve-
ment of 15% over each iteration of the task. In con-
trast, the conventional VR interface showed a linear
dependency between completion time and the num-
ber of objects manipulated, despite using both hands
simultaneously. It also showed a better rate of im-
provement than the verbal interface, at 20%. This can
be explained by the user’s frustration with the con-
ventional interface, leading to rushing the task. Mean-
Figure 11: Left-hand translation between conditions.
Figure 12: User preference questionnaire.
while, Hands-Free VR’s ability to handle multiple ob-
jects in parallel gives it a growing advantage as the
object count increases.
The data does not have a normal distribution,
so we compared the means using Wilcoxon’s signed
rank test. The comparison confirms the statistical sig-
nificance of the efficiency advantage of Hands-Free
VR over the conventional VR user interface for each
task, for both tasks combined, and for each of the five
objective metrics. This provides support for RH2, i.e.,
Hands-Free VR has a significant efficiency advantage
over the conventional VR user interface. The effect
sizes measured using Cohen’s d are all larger than
1.0, confirming that the study’s N = 22 participants
are sufficient for a power of 90.
The user preference questionnaire results are pre-
sented in Table 2 (numerical) and Figure 12 (box
plots). Negatively phrased questions were reversed
(6−x), so higher scores indicate better outcomes. The
largest and only significant difference was for Q1,
where participants found the conventional VR inter-
face more ”tedious” and requiring ”more work” than
Hands-Free VR. For Q3, participants strongly dis-
agreed that Hands-Free VR required significant phys-
ical effort (median 5), while the conventional inter-
face had a median of 3, though this difference was
not significant. Despite this, participants often treated
the conventional interface as a physical exercise chal-
lenge. Questions 2, 4, and 5 had high, similar me-
dian scores for both conditions (5, 5, and 4, respec-
tively). Importantly, Hands-Free VR scored the max-
imum median for both intuitiveness (Q2) and reliabil-
ity (Q4). We conclude that RH3 is supported, except
Table 2: User preference questionnaire statistics.
Question Q1 Q2 Q3 Q4 Q5
CC 2 5 3 5 4
Median
EC 5 5 5 5 4
CC 2.84 4.60 3.4 4.44 3.48
Mean
EC 4.44 4.04 4.04 4.36 3.92
CC 1.68 0.87 1.47 0.87 1.39
Std. dev.
EC 0.82 1.46 1.62 1.11 1.26
Z -3.57 -1.64 -1.49 -0.35 -1.53
Wilcoxon
p 0.00036 0.10 0.134 ∼1 0.123
Hands-Free VR
539

the perceived reduction in physical effort with Hands-
Free VR was not significant.
Discussion. Hands-Free VR reliably interprets spo-
ken commands, even with pauses or incomplete sen-
tences, using a trigger button and VR-optimized mod-
els. Tested with mostly non-native English speakers,
it excelled in accent robustness, outperforming Quest
3’s speech-to-text, which had a Word Error Rate of
43% in our tests, by supporting diverse accents from
day one. Most of our 22 participants were new to VR,
probably contributing to their preference for physical
interaction and viewing voice commands as efficient
but less engaging.
In work settings, users may prefer voice-based in-
terfaces for complex tasks such as handling multi-
ple objects, precise configurations, or information re-
trieval, while traditional controls suit simpler tasks.
For applications focused on physical exercise or skill
building, such as engine assembly, core actions must
remain physical. Voice commands can be supple-
mented by identifying parts, showing assembly order,
or setting conditions, preserving embodied learning
while reducing menu navigation and cognitive load.
7 CONCLUSIONS, LIMITATIONS,
AND FUTURE WORK
We introduced Hands-Free VR, a voice-based VR
interface that converts speech into executable com-
mands. Fine-tuned for phonetic similarity, diverse ac-
cents, and natural language variation, Hands-Free VR
achieved a 94% command understanding, enabling
efficient execution of complex tasks and offering sig-
nificant advantages over traditional VR controls.
7.1 Limitations
One limitation is our reliance on a powerful external
workstation as an edge server. Although standalone
VR headsets have advanced considerably, running
speech-to-text and large language models directly on
such devices is still not feasible. Our tests showed
that speech-to-text took about 3 seconds and text-
to-command took over 21 seconds on a laptop-class
GPU (Nvidia RTX 3070), which is too slow for most
VR applications. Until new technology emerges, ro-
bust voice-based VR interfaces will likely depend on
a distributed server-client setup.
A limitation is the slow response time, even with
a powerful edge server, which can be problematic
for time-sensitive commands such as stopping a dy-
namic VE. Rewinding to when the user started speak-
ing could help. Future work could speed up infer-
ence using quantization or simpler LLMs, and com-
bining speech-to-text and text-to-command into one
model could streamline processing. Another limita-
tion is that complex commands must currently be split
into simpler steps, e.g., “Select blue cubes” and “Put
them into the box” instead of “Select blue cubes and
move them into the box”. Furthermore, the system
had a limited number of discrete parameters per com-
mand, which means that continuous commands such
as move x distance were not supported by our system
due to the LLM’s tendency to hallucinate compromis-
ing the robustness of the system.
7.2 Future Work
Hands-Free VR can be expanded simply by adding
new verbs, objects, and attributes to its syntax and lex-
icon, then re-running data synthesis and fine-tuning.
The VR application would need the corresponding
execution capabilities. Future work aims to remove
the programmer from this process, letting users define
and extend the interface by demonstrating desired ac-
tions. The key advantage: Users providing only one
English formulation while Hands-Free VR generates
multiple variants should be preserved.
A more ambitious goal is to eliminate the fixed set
of commands. Instead of mapping speech to prede-
fined commands, Hands-Free VR could generate VR
interface source code on the fly. This would support
an unbounded range of commands, although ensuring
robustness remains challenging.
Another direction is to determine which tasks are
best served by voice commands. Although our ex-
periments highlight clear advantages for certain ac-
tions, understanding which commands are general
and which are domain-specific would simplify de-
signing future VR interfaces.
Moreover, this type of interface could be applied
to systems in areas such as robotics and healthcare,
where it would allow users with mobility limitations
to interact with an agent or system.
An interesting direction would be the efficiency
and user preference of a hybrid system, where they
can experience the best of both worlds, the efficiency
of voice commands with the immersion and interac-
tivity of conventional VR interfaces.
Hands-Free VR improves VR efficiency by min-
imizing head movements, reducing rotations from
five full turns to less than one, potentially mitigat-
ing cyber-sickness—a benefit for future study. It also
supports diverse accents but should be tested with
broader participant variability. Voice input adds a
valuable channel, simplifying tedious tasks and their
specification.
HUCAPP 2025 - 9th International Conference on Human Computer Interaction Theory and Applications
540

ACKNOWLEDGEMENTS
This work was supported in part by the National Sci-
ence Foundation grants 2417510 and 2309564.
REFERENCES
Amazon (2016). Amazon AWS Polly.
Andujar, C. and Argelaguet, F. (2007). Anisomorphic
ray-casting manipulation for interacting with 2d guis.
Computers & Graphics, 31(1):15–25.
Argelaguet, F. and Andujar, C. (2013). A survey of 3d
object selection techniques for virtual environments.
Computers & Graphics, 37(3):121–136.
Argelaguet, F., Andujar, C., and Trueba, R. (2008). Over-
coming eye-hand visibility mismatch in 3d pointing
selection. In Proceedings of the 2008 ACM sympo-
sium on Virtual reality software and technology, pages
43–46.
Brown, T., Mann, B., Ryder, N., Subbiah, M., Kaplan, J. D.,
Dhariwal, P., Neelakantan, A., Shyam, P., Sastry, G.,
Askell, A., et al. (2020). Language models are few-
shot learners. Advances in neural information pro-
cessing systems, 33:1877–1901.
Buchta, K., W
´
ojcik, P., Nakonieczny, K., Janicka, J.,
Gałuszka, D., Sterna, R., and Igras-Cybulska, M.
(2022a). Microtransactions in vr. a qualitative com-
parison between voice user interface and graphical
user interface. In 2022 15th International Conference
on Human System Interaction (HSI), pages 1–5.
Buchta, K., W
´
ojcik, P., Nakonieczny, K., Janicka, J.,
Gałuszka, D., Sterna, R., and Igras-Cybulska, M.
(2022b). Modeling and optimizing the voice assistant
behavior in virtual reality. In 2022 IEEE International
Symposium on Mixed and Augmented Reality Adjunct
(ISMAR-Adjunct), pages 397–402.
Buchta, K., W
´
ojcik, P., Pelc, M., G
´
orowska, A., Mota, D.,
Boichenko, K., Nakonieczny, K., Wrona, K., Szym-
czyk, M., Czuchnowski, T., Janicka, J., Gałuszka, D.,
Sterna, R., and Igras-Cybulska, M. (2022c). Nux ive -
a research tool for comparing voice user interface and
graphical user interface in vr. In 2022 IEEE Confer-
ence on Virtual Reality and 3D User Interfaces Ab-
stracts and Workshops (VRW), pages 982–983.
Calandra, D., Prattic
`
o, F. G., and Lamberti, F. (2022). Com-
parison of hands-free speech-based navigation tech-
niques for virtual reality training. In 2022 IEEE 21st
Mediterranean Electrotechnical Conference (MELE-
CON), pages 85–90.
Chowdhery, A., Narang, S., Devlin, J., Bosma, M., Mishra,
G., Roberts, A., Barham, P., Chung, H. W., Sut-
ton, C., Gehrmann, S., et al. (2022). Palm: Scal-
ing language modeling with pathways. arXiv preprint
arXiv:2204.02311.
chromadb (2022). Trychroma. version 0.4.12.
Chu, C.-C., Dani, T., and Gadh, R. (1997). Multimodal in-
terface for a virtual reality based computer aided de-
sign system. In Proceedings of International Confer-
ence on Robotics and Automation, volume 2, pages
1329–1334 vol.2.
Chung, H. W., Hou, L., Longpre, S., Zoph, B., Tay, Y., Fe-
dus, W., Li, Y., Wang, X., Dehghani, M., Brahma, S.,
Webson, A., Gu, S. S., Dai, Z., Suzgun, M., Chen, X.,
Chowdhery, A., Castro-Ros, A., Pellat, M., Robinson,
K., Valter, D., Narang, S., Mishra, G., Yu, A., Zhao,
V., Huang, Y., Dai, A., Yu, H., Petrov, S., Chi, E. H.,
Dean, J., Devlin, J., Roberts, A., Zhou, D., Le, Q. V.,
and Wei, J. (2022). Scaling instruction-finetuned lan-
guage models.
Cohen, J. (2013). Statistical power analysis for the behav-
ioral sciences. Academic press.
Fashimpaur, J., Kin, K., and Longest, M. (2020). Pinchtype:
Text entry for virtual and augmented reality using
comfortable thumb to fingertip pinches. In Extended
abstracts of the 2020 CHI conference on human fac-
tors in computing systems, pages 1–7.
Forsberg, A., Herndon, K., and Zeleznik, R. (1996). Aper-
ture based selection for immersive virtual environ-
ments. In Proceedings of the 9th annual ACM sym-
posium on User interface software and technology,
pages 95–96.
G
¨
obl., B., Kriglstein., S., and Hlavacs., H. (2021). Conver-
sational interfaces in serious games: Identifying po-
tentials and future research directions based on a sys-
tematic literature review. In Proceedings of the 13th
International Conference on Computer Supported Ed-
ucation - Volume 1: CSEDU, pages 108–115. IN-
STICC, SciTePress.
Han, X. and Wan, H. (2010). A framework for virtual hand
haptic interaction. Transactions on edutainment IV,
pages 229–240.
Hombeck, J., Voigt, H., Heggemann, T., Datta, R. R., and
Lawonn, K. (2023). Tell me where to go voice-
controlled hands-free locomotion for virtual reality
systems. In 2023 IEEE Conference Virtual Reality and
3D User Interfaces (VR), pages 123–134.
Hutama, W., Harashima, H., Ishikawa, H., and Manabe, H.
(2021). Hmk: Head-mounted-keyboard for text input
in virtual or augmented reality. In Adjunct Proceed-
ings of the 34th Annual ACM Symposium on User In-
terface Software and Technology, pages 115–117.
IBM Corp. (2022). IBM SPSS Statistics [Computer soft-
ware]. Version 27.0.
LangChain (2022). Langchain. version 0.0.299.
Lewis, P., Perez, E., Piktus, A., Petroni, F., Karpukhin,
V., Goyal, N., K
¨
uttler, H., Lewis, M., tau
Yih, W., Rockt
¨
aschel, T., Riedel, S., and Kiela,
D. (2021). Retrieval-augmented generation for
knowledge-intensive nlp tasks.
Li, Z., Zhang, S., Anwar, M. S., and Wang, J. (2018). Appli-
cability analysis on three interaction paradigms in im-
mersive vr environment. In 2018 International Con-
ference on Virtual Reality and Visualization (ICVRV),
pages 82–85.
Loshchilov, I. and Hutter, F. (2017). Fixing weight decay
regularization in adam. CoRR, abs/1711.05101.
Meta (2013). Quest 3: New Mixed Reality Headset. https:
Hands-Free VR
541

//www.meta.com/quest/products/quest-3/. Accessed:
2023-10-18.
Mine, M. R. (1995). Virtual environment interaction tech-
niques. UNC Chapel Hill CS Dept.
Monteiro, P., Gonc¸alves, G., Coelho, H., Melo, M., and
Bessa, M. (2021). Hands-free interaction in im-
mersive virtual reality: A systematic review. IEEE
Transactions on Visualization and Computer Graph-
ics, 27(5):2702–2713.
Morotti, E., Donatiello, L., and Marfia, G. (2020). Fos-
tering fashion retail experiences through virtual real-
ity and voice assistants. In 2020 IEEE Conference on
Virtual Reality and 3D User Interfaces Abstracts and
Workshops (VRW), pages 338–342.
OpenAI (2022). Chat GPT.
Pierce, J. S., Forsberg, A. S., Conway, M. J., Hong, S.,
Zeleznik, R. C., and Mine, M. R. (1997). Image plane
interaction techniques in 3d immersive environments.
In Proceedings of the 1997 symposium on Interactive
3D graphics, pages 39–ff.
Radford, A., Kim, J. W., Xu, T., Brockman, G., McLeavey,
C., and Sutskever, I. (2023). Robust speech recog-
nition via large-scale weak supervision. In Inter-
national Conference on Machine Learning, pages
28492–28518. PMLR.
Shapiro, S. S. and Wilk, M. B. (1965). An analysis
of variance test for normality (complete samples).
Biometrika, 52(3/4):591–611.
Steinicke, F., Ropinski, T., and Hinrichs, K. (2006). Object
selection in virtual environments using an improved
virtual pointer metaphor. In Computer Vision and
Graphics: International Conference, ICCVG 2004,
Warsaw, Poland, September 2004, Proceedings, pages
320–326. Springer.
Su, H., Shi, W., Kasai, J., Wang, Y., Hu, Y., Ostendorf,
M., tau Yih, W., Smith, N. A., Zettlemoyer, L., and
Yu, T. (2023). One embedder, any task: Instruction-
finetuned text embeddings.
Tim Dettmers (2022). Bitsandbytes. version 0.41.1.
Touvron, H., Lavril, T., Izacard, G., Martinet, X., Lachaux,
M.-A., Lacroix, T., Rozi
`
ere, B., Goyal, N., Hambro,
E., Azhar, F., et al. (2023). Llama: Open and ef-
ficient foundation language models. arXiv preprint
arXiv:2302.13971.
Ware, C. (1990). Using hand position for virtual object
placement. The Visual Computer, 6:245–253.
Whitlock, M., Harnner, E., Brubaker, J. R., Kane, S., and
Szafir, D. A. (2018). Interacting with distant objects
in augmented reality. In 2018 IEEE Conference on
Virtual Reality and 3D User Interfaces (VR), pages
41–48.
Wilcoxon, F. (1992). Individual comparisons by ranking
methods. Springer.
Zhao, J., Parry, C. J., dos Anjos, R., Anslow, C., and Rhee,
T. (2020). Voice interaction for augmented reality nav-
igation interfaces with natural language understand-
ing. In 2020 35th International Conference on Image
and Vision Computing New Zealand (IVCNZ), pages
1–6.
HUCAPP 2025 - 9th International Conference on Human Computer Interaction Theory and Applications
542
