
Beyond Discrete Environments: Benchmarking
Regret-Based Automatic Curriculum Learning in MuJoCo
Chin-Jui Chang
1
, Chen-Xing Li
1,2
, Jan Seyler
2
and Shahram Eivazi
1,2
1
Department of Computer Science, Eberhard Karls University of T
¨
ubingen, T
¨
ubingen, Germany
2
Festo, Esslingen, Germany
Keywords:
Reinforcement Learning, Curriculum Learning, Unsupervised Environment Design, Regret-Based Methods,
Robustness, Generalization, Automatic Curriculum Learning, Benchmarking.
Abstract:
Training robust reinforcement learning (RL) agents capable of performing well in unseen scenarios remains
a significant challenge. Curriculum learning has emerged as a promising approach to build transferable skills
and enhance overall robustness. This paper investigates regret-based adversarial methods for automatically
generating curricula, extending their evaluation beyond simple environments to the more complex MuJoCo
suite. We benchmark several state-of-the-art regret-based methods against traditional baselines, revealing that
while these methods generally outperform baselines, the performance gains are less substantial than antici-
pated in these more complex environments. Moreover, our study provides valuable insights into the applica-
tion of regret-based curriculum learning methods to continuous parameter spaces and highlights the challenges
involved. We discuss promising directions for improvement and offer perspectives on how current automatic
curriculum learning techniques can be applied to real-world tasks.
1 INTRODUCTION
Reinforcement learning (RL) has evolved into a key
AI component, advancing fields from robotics (Ope-
nAI et al., 2020) to gaming (Silver et al., 2018;
Mnih et al., 2015), as documented in recent surveys
(Arulkumaran et al., 2017; Li, 2018). However, tra-
ditional RL faces two major challenges: sparse re-
wards, where feedback is infrequent (Andrychowicz
et al., 2017), and limited robustness in novel situa-
tions (Cobbe et al., 2019b; Kirk et al., 2021). Cur-
riculum learning addresses these limitations by incre-
mentally increasing task complexity (Narvekar et al.,
2020; Portelas et al., 2020), helping agents manage
both sparse rewards and adaptation to new scenarios.
Curriculum learning in RL has several advantages:
it allows agents to master hard tasks that would be
impossible to learn if approached directly (Bengio
et al., 2009; Kulkarni et al., 2016; Dietterich, 2000;
Held et al., 2018); it breaks down complex tasks into
a series of incrementally harder sub-tasks so agents
can build skills incrementally; and it promotes the de-
velopment of more adaptable agents that can handle a
wide range of tasks and environments. Moreover, cur-
riculum learning can also improve sample efficiency,
agents can learn more with less data (Narvekar et al.,
2020; Portelas et al., 2020), which is valuable in real
world applications where data collection is time con-
suming or expensive.
Historically, designing curricula in reinforcement
learning has been primarily hand-crafted (Graves
et al., 2017; Narvekar et al., 2020; Bengio et al.,
2009; Taylor and Stone, 2009). While effective in
certain scenarios, hand-crafted curricula are time con-
suming to create and require domain-specific knowl-
edge. Moreover, these curricula lack flexibility and
fail to adapt to an individual agent’s evolving capabil-
ity. This becomes especially problematic when deal-
ing with large or unknown task spaces or scenarios
that require frequent curriculum updates.
To address these problems, the Unsupervised En-
vironment Design (UED) (Dennis et al., 2020) frame-
work has been proposed which views curriculum gen-
eration as an automated process. UED formulates the
learning process as a game between the agent and an
environment generator. The generator aims to create
environments that maximize the agent’s regret - the
difference between the optimal performance and the
agent’s current performance in a given environment.
Meanwhile, the agent tries to minimize this regret by
improving its policy. This ensures the generated envi-
ronments are the most challenging yet still solvable,
Chang, C.-J., Li, C.-X., Seyler, J. and Eivazi, S.
Beyond Discrete Environments: Benchmarking Regret-Based Automatic Curriculum Learning in MuJoCo.
DOI: 10.5220/0013116400003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 2, pages 133-143
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
133

so the agent improves in areas where it has the most
room to grow. Unlike simpler return-based adversar-
ial methods (Sukhbaatar et al., 2018; Wang et al.,
2019; Florensa et al., 2017) which often create im-
possible or trivial environments leading to inefficient
learning, regret-based methods find the balance that
promotes skill development.
While UED family of research has been demon-
strated to be promising, most of the research has
been limited to a few simple benchmark environments
like MiniGrid, BipedalWalker and CarRacing (Dennis
et al., 2020; Jiang et al., 2021b; Parker-Holder et al.,
2022; Azad et al., 2023), which may not fully cap-
ture the complexity and challenges of more realistic
scenarios. The limited scope of these test environ-
ments raises questions about the scalability of UED
methods to more complex and realistic tasks. Many
of these benchmark environments have simplified dy-
namics and constrained action spaces that may not ad-
equately represent the continuous, high-dimensional
state and action spaces found in real-world applica-
tions. This gap in current research motivates us to ex-
plore UED in more complex simulation environments
that better reflect the challenges of real-world tasks.
Our research benchmarks various UED algo-
rithms across a wider range of environments, provid-
ing a comprehensive landscape of their effectiveness.
By extending our testing to more complex scenarios,
we aim to identify the strengths and limitations of cur-
rent approaches within the UED framework. Our pri-
mary focus is on comparing these algorithms to deter-
mine which ones demonstrate superior performance
in unseen environments. We evaluate their ability to
generate effective curricula, transfer learned skills to
new situations, and adapt to different environment pa-
rameterizations, particularly in challenging continu-
ous control tasks. Through this comparative analy-
sis, we seek to offer practical insights for researchers
and practitioners interested in applying UED methods
to realistic domains, potentially bridging the gap be-
tween simplified benchmarks and real-world robotics
applications.
2 RELATED WORKS
2.1 RL Benchmarks
Several RL benchmarks have been proposed to eval-
uate various aspects of RL algorithms. The Ar-
cade Learning Environment (ALE) (Machado et al.,
2018) incorporates Atari 2600 games to assess RL al-
gorithms’ performance across diverse environments.
Bsuite (Osband et al., 2020), a compact benchmark
suite, tests algorithms’ robustness to noise and eval-
uates core RL agent capabilities including general-
ization, exploration, and long-term consequence han-
dling. CARL (Benjamins et al., 2021) extends es-
tablished RL environments to contextual RL prob-
lems, providing a consistent theoretical framework
for studying generalization. It allows researchers
to create environment variations by modifying goal
states or altering transition dynamics, offering a flex-
ible platform for in-depth RL research.
Another category of benchmarks employs Proce-
dural Content Generation (PCG) to create diverse en-
vironments with varying complexity levels. The Proc-
gen Benchmark (Cobbe et al., 2019a) is a prominent
example, featuring 16 procedurally generated game-
like environments designed to evaluate both sample
efficiency and generalization in reinforcement learn-
ing. Procgen uses PCG to create a vast array of
levels with randomized layouts, assets, and game-
specific details, forcing agents to learn robust policies
that generalize across diverse scenarios. Another no-
table example is Obstacle Tower (Juliani et al., 2019),
which offers a rich 3D environment with complex
navigation challenges. While these PCG-based en-
vironments provide a range of difficulty levels and
emphasize generalization, they lack built-in curricula
or structured training paces for agents. On the other
hand, our work focuses on curriculum generation al-
gorithms that automatically design optimal training
paths and paces.
To our knowledge, TeachMyAgent (Romac et al.,
2021) is the only existing benchmark specifically
focused on curriculum learning algorithms in re-
inforcement learning. It unifies various curricu-
lum reinforcement learning (CRL) methods under a
teacher-student framework, evaluating diverse teacher
algorithms such as ALP-GMM (Portelas et al.,
2019), RIAC (Baranes and Oudeyer, 2009), Covar-
GMM (Moulin-Frier et al., 2014), SPDL (Klink
et al., 2020), ADR (Plappert et al., 2019), and Goal-
GAN (Florensa et al., 2018). While TeachMyA-
gent provides a structured platform for benchmarking
these algorithms, our work differentiates itself by fo-
cusing on regret-based curriculum learning methods,
which are not included in their benchmark. Addition-
ally, we extend our evaluation to a broader range of
MuJoCo environments, offering a comprehensive as-
sessment of algorithm performance across diverse and
complex continuous control tasks.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
134

2.2 Alternative Approaches to
Curriculum Learning
While our work focuses specifically on regret-based
curriculum learning within the UED framework, it’s
important to contextualize our approach within the
broader landscape of curriculum learning in rein-
forcement learning. Besides regret-based methods,
many existing curriculum learning approaches em-
ploy different strategies for task generation and se-
quencing. Narvekar et al. (2020) (Narvekar et al.,
2020) provide a comprehensive survey and frame-
work for these diverse approaches. They categorize
curriculum learning methods based on various dimen-
sions, including task generation, sequencing meth-
ods, and transfer learning techniques. The survey
highlights several key approaches such as sample se-
quencing strategies, co-learning strategies, and meth-
ods that modify reward functions or state distribu-
tions.
Some recent curriculum learning approaches have
also shown promising results. The Paired Open-
Ended Trailblazer (POET) algorithm (Wang et al.,
2019) maintains a population of environment-agent
pairs, continuously performing three key tasks: gen-
erating new environments by mutating existing ones,
improving agents within their paired environments,
and attempting to transfer successful agents between
environments. The process creates a co-evolutionary
dynamics of agents and environments. However,
POET requires maintaining a population of environ-
ments and testing all agents in their paired environ-
ments, which require more computational resources.
Additionally, they require a manually decided thresh-
old to discard environments, a limitation not present
in the regret-based methods we benchmark.
The CURROT (Klink et al., 2022) algorithm refor-
mulates curriculum generation as a constrained opti-
mal transport problem. Unlike previous methods that
use KL divergence, CURROT uses Wasserstein dis-
tance to measure distribution similarity. The algo-
rithm enforces a strict performance constraint across
all tasks in the curriculum, avoiding the pitfall of mix-
ing trivial and infeasible tasks. By representing the
curriculum as a set of particles and utilizing context
buffer (or environment parameter buffer), CURROT
balances the trade-off between exploration and ex-
ploitation. However, a key limitation of CURROT
is its reliance on a pre-defined target task distribu-
tion. This contrasts with the open-ended approaches
we evaluate in this work, which can generate ever-
expanding curricula without the need for predefined
target distributions, offering greater flexibility in task
exploration and adaptation.
3 BACKGROUND
In this section, we provide an overview of the back-
ground knowledge necessary to enhance understand-
ing of the algorithms discussed in Section 4.
3.1 Unsupervised Environment Design
Unsupervised Environment Design (UED) (Dennis
et al., 2020) is a paradigm that aims to automatically
generate a curriculum of levels or tasks for a student
agent, with the goal of achieving systematic general-
ization across all possible levels. In this framework,
levels (hereafter used interchangeably with environ-
ment parameters) are typically produced by a gen-
erator, or teacher. This generator operates by max-
imizing a utility function, U
t
(π, θ), where π repre-
sents the student agent’s policy and θ denotes the level
parameters. The utility function serves as a mea-
sure of the educational value or challenge provided
by a given level, guiding the curriculum’s progres-
sion to optimize the agent’s learning trajectory. This
approach enables a dynamic and adaptive learning
process, continually tailoring the environment to the
agent’s evolving capabilities.
UED methods employ teachers that maximize re-
gret, defined as the difference between the expected
return of the current policy and the optimal policy.
The teacher’s utility is then defined as:
U
R
t
(π, θ) = argmax
π
∗
∈Π
{
REGRET
θ
(π, π
∗
)
}
(1)
= argmax
π
∗
∈Π
{
V
θ
(π
∗
) −V
θ
(π)
}
. (2)
Regret-based objectives are desirable because
they promote the generation of the simplest levels
that the student cannot currently solve (Dennis et al.,
2020). Formally, if the learning process reaches a
Nash equilibrium, the resulting student policy π prov-
ably converges to a minimax regret policy, defined as:
π = argmin
π∈Π
max
θ,π
∗
∈Θ,Π
{
REGRET
θ
(π, π
∗
)
}
. (3)
However, without access to π
∗
for each level, UED
algorithms must approximate the regret. In practice,
regret is estimated as the difference in return attained
by the main student agent (i.e., protagonist) and a sec-
ond agent (i.e., antagonist).
3.2 Domain Randomization
Domain Randomization (DR) (Tobin et al., 2017) is
a technique used to bridge the reality gap between
simulated and real-world environments, particularly
Beyond Discrete Environments: Benchmarking Regret-Based Automatic Curriculum Learning in MuJoCo
135

in the context of robotic learning and computer vi-
sion tasks. Unlike Unsupervised Environment Design
(UED) methods, DR does not actively generate a cur-
riculum but instead randomly samples a large num-
ber of environment configurations from a predefined
distribution. The randomization process can be for-
malized as sampling from a distribution p(θ) over en-
vironment parameters θ, where the goal is to train a
model f
φ
(e.g., a neural network) that minimizes the
expected loss L across this distribution:
φ
∗
= argmin
φ
E
θ∼p(θ)
[L ( f
φ
, θ)]. (4)
DR’s objective is to let policies generalize to un-
seen scenarios by making the model encounter a wide
array of variations during training. While it shows
very promising results for various robotic tasks and
computer vision, the approach of DR may prove inef-
ficient in more complex domains because of the low
probability of sampling relevant environment config-
urations in comparison with more targeted curriculum
learning approaches used by UED.
3.3 Prioritized Level Replay
Prioritized Level Replay (PLR) (Jiang et al., 2021a)
is a method designed to enhance learning efficiency
by selectively sampling training levels based on their
estimated learning potential. The potential value for
future learning is calculated using the average mag-
nitude of the Generalized Advantage Estimate (GAE)
over the episode trajectory, defined as:
Score(l) =
1
T
T
∑
t=1
|δ
t
| (5)
where δ
t
= r
t
+ γV (s
t+1
) − V (s
t
) is the TD-error at
time step t, and T is the length of the episode on level
l. The intuition is that higher magnitude TD-errors
indicate a greater discrepancy between expected and
actual returns, suggesting more potential for learning.
Once scores are assigned, PLR employs a rank-
based prioritization scheme for sampling levels. The
probability of sampling a level is inversely propor-
tional to its rank, given by:
P(l) ∝
1
rank(l)
α
(6)
where α is a hyperparameter controlling the de-
gree of prioritization. To prevent scores from be-
coming stale, PLR incorporates a staleness factor
that increases the sampling probability for levels that
haven’t been played recently. This is achieved by
modifying the sampling probability:
P(l) ∝
1
rank(l)
α
+ β · staleness(l) (7)
where β is a hyperparameter balancing the importance
of staleness, and staleness(l) is a measure of how long
it has been since level l was last played. This com-
bination of prioritization and staleness awareness al-
lows PLR to adaptively focus on high-potential levels
while still maintaining exploration of the level space.
3.4 MuJoCo Environments
MuJoCo (Multi-Joint dynamics with Contact) is a
high-performance physics engine that has become
a cornerstone in robotics and reinforcement learn-
ing research for its precise simulation capabilities.
The environments provided in Gymnasium (Towers
et al., 2024) offer a standardized implementation of
MuJoCo-based tasks, featuring accurate physical dy-
namics and continuous control challenges. These en-
vironments excel in simulating complex dynamic sys-
tems with realistic contact dynamics and joint inter-
actions, making them particularly valuable for devel-
oping and evaluating advanced control algorithms in
continuous action spaces. The simulation framework
incorporates sophisticated physics modeling, includ-
ing friction, contact forces, and multi-joint dynam-
ics, providing researchers with reliable benchmarks
for testing reinforcement learning approaches.
4 METHOD
4.1 Automatic Curriculum Learning
Methods Included
Herein, we outline the algorithms included in our
benchmark study. We have picked algorithms rep-
resenting a different variety of approaches to UED:
from adversarial frameworks, including PAIRED and
REPAIRED, to evolutionary methods including AC-
CEL and structured manifold sampling with CLUTR,
and foundational techniques including DR, PLR, and
Robust PLR. In this paper, we include the cur-
rent algorithms that benchmark a wide spectrum of
UED strategies, providing insight into their relative
strengths and weaknesses and helping retain the most
efficient strategies in training robust, generalizable
policies.
4.1.1 REPAIRED
Replay-Enhanced PAIRED (REPAIRED) (Jiang
et al., 2021b) extends the PAIRED approach by
incorporating a replay mechanism that focuses on
levels causing the highest regret. Levels generated by
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
136

PAIRED is only used once and then discarded. RE-
PAIRED addresses this inefficiency and instability by
reusing and concentrating on past environment levels
with the highest regret. Adhering to the principles of
robust PLR (introduced in Section 4.1.5), REPAIRED
avoids training agents on newly generated levels. It
strategically utilizes a curated selection of previously
encountered levels.
4.1.2 ACCEL
Adversarially Compounding Complexity by Editing
Levels (ACCEL) (Parker-Holder et al., 2022) intro-
duces an iterative approach to curriculum genera-
tion. It focuses on editing existing high-regret en-
vironments, progressively increasing their complex-
ity through evolutionary methods. The key insight
of ACCEL is that if a particular environment level
challenges the agent’s current capabilities, then strate-
gically edited versions of this level should continue
to push the boundaries of the agent’s competence.
This approach leads to the efficient discovery of in-
creasingly challenging scenarios. Importantly, AC-
CEL aligns with the principles of robust PLR and RE-
PAIRED by not training on newly generated levels,
maintaining a clear separation between environment
generation and agent training.
4.1.3 CLUTR
Curriculum Learning Using Task Representations
(CLUTR) (Azad et al., 2023) addresses a key chal-
lenge in the PAIRED framework: the simultaneous
learning of a task space and curriculum, which can
lead to training instability. CLUTR innovates by pre-
training a variational autoencoder (VAE) (Kingma
and Welling, 2013) to represent the environment’s
parameter space. This approach enables concurrent
generation of all environment parameters, fostering
more structured and coherent task creation. By map-
ping similar tasks to proximal points in latent space,
CLUTR facilitates smoother curriculum progression.
The VAE’s latent representation provides a stable,
lower-dimensional space for the teacher to explore,
simplifying task generation and mitigating the insta-
bility issues associated with simultaneous learning.
4.1.4 DR and PLR
Domain Randomization (DR) (Tobin et al., 2017) and
Prioritized Level Replay (PLR) (Jiang et al., 2021a)
serve as baselines in our study, chosen for their sim-
plicity and proven effectiveness. DR enhances agent
robustness by training across a diverse range of ran-
domly generated scenarios. PLR refines this ap-
proach by prioritizing levels based on their estimated
TD (temporal difference) error, focusing the agent’s
learning on the most informative experiences. These
methods provide valuable benchmarks against which
more advanced curriculum learning algorithms can be
compared.
4.1.5 Robust PLR (PLR⊥)
Robust PLR introduced in the REPAIRED pa-
per (Jiang et al., 2021b) is an enhanced iteration of
the original Prioritized Level Replay (PLR) that offers
guaranteed theoretical robustness. It diverges from
the original PLR in two crucial aspects: firstly, it
employs regret prioritization for level sampling, re-
placing the L1 value-loss metric used in the origi-
nal PLR. Secondly, it constrains the agent’s training
exclusively to sampled levels, avoiding training on
newly generated environments. These strategic mod-
ifications yield significant improvements in training
stability and theoretical guarantees. At equilibrium,
this approach ensures the convergence of the resulting
policy to a minimax regret policy. This refinement ad-
dresses key limitations of the original PLR, offering a
more principled approach to level sampling.
4.1.6 PAIRED
Protagonist Antagonist Induced Regret Environment
Design (PAIRED) (Dennis et al., 2020) is a pio-
neering algorithm in Unsupervised Environment De-
sign (UED), introducing a novel regret-based adver-
sarial framework for automatic environment genera-
tion. PAIRED employs a tripartite system comprising
a teacher, a student agent, and an antagonist agent.
The teacher is trained using regret, defined as the dif-
ference between the rewards of the student and antag-
onist agents. This approach motivates the teacher to
create levels that are challenging yet solvable for the
student agent. If a level is unsolvable, both the student
and antagonist would receive low rewards, providing
a natural balance. PAIRED’s innovative structure en-
ables the generation of a curriculum that continuously
adapts to the student agent’s improving capabilities,
fostering efficient learning and generalization.
4.2 Extended MuJoCo Environments
We extend environments based on the MuJoCo
physics engine (Todorov et al., 2012) to create under-
specified partially observable Markov decision pro-
cesses (UPOMDPs) by introducing adjustable envi-
ronment parameters. The specific level parameters
subject to modification are detailed in Section 5. Our
environments differ significantly from those previ-
ously used to benchmark UED algorithms in two key
Beyond Discrete Environments: Benchmarking Regret-Based Automatic Curriculum Learning in MuJoCo
137

Table 1: Comparison of Environment Generation Algo-
rithms.
Algorithm Env Generator Uses PLR
DR Fixed distribution No
PLR Fixed distribution L1 value-loss
sampler
PLR⊥ Fixed distribution Regret-based
sampler
ACCEL Fixed distribution
+ Evolution
Editing
Regret-based
sampler
PAIRED PAIRED No
REPAIRED PAIRED Regret-based
sampler
CLUTR PAIRED +
Pretrained VAE
No
aspects: firstly, the environments in this work fea-
ture a continuous parameter space, allowing for fine-
grained variations in environment dynamics. Sec-
ondly, alterations in these parameters—such as grav-
ity or motor gear ratios—directly influence the state
transition function, fundamentally changing the envi-
ronment’s dynamic and the optimal policy, rather than
merely increasing state complexity.
These MuJoCo-based UPOMDPs more closely
approximate the challenges inherent in sim-to-real
transfer learning scenarios. In such cases, the dis-
crepancies between simulated training environments
and real-world conditions can significantly impact the
performance of learned policies. By testing UED al-
gorithms on these new UPOMDP environments, we
aim to evaluate their capability in constructing poli-
cies that are robust to variations in environment dy-
namics, potentially facilitating more effective sim-to-
real transfer. This approach provides a testbed for
assessing the adaptability and generalization capa-
bilities of regret-based curriculum algorithms in dy-
namic, physics-based environments.
5 EXPERIMENT
To evaluate the effectiveness of UED methods
in complex, continuous control tasks, we ex-
tended our experiments to include six MuJoCo-
based environments from Gymnasium (Towers et al.,
2024): HalfCheetah-v5, Ant-v5, Swimmer-v5,
Hopper-v5, Walker2d-v5, and Humanoid-v5. These
environments offer diverse locomotion challenges
with continuous action and state spaces, closely re-
sembling real-world robotic control tasks.
For all environments except Swimmer-v5, we
made the motor gear ratio and gravity adjustable. In
Swimmer-v5, we replaced gravity with viscosity, re-
flecting its fluid medium simulation, since gravity
plays a less significant role in this environment. The
ranges for these parameters were set to within ±30%
of their original values during training, allowing for
significant task difficulty variation while maintaining
physical plausibility.
In our study, we employ Proximal Policy Op-
timization (PPO) (Schulman et al., 2017) to op-
timize the environment generator (teacher agent),
following the approach of previous UED methods.
For the student agents, we utilize Soft Actor-Critic
(SAC) (Haarnoja et al., 2018) method, given its
widespread adoption and superior performance in
continuous action spaces compared to other algo-
rithms.
To ensure statistical robustness and provide a
more accurate assessment of performance, we con-
duct training across five random seeds for each envi-
ronment and algorithm combination. The results pre-
sented in our analysis reflect the average scores ob-
tained from these multiple runs. The specific training
parameters are detailed in Table 2.
Table 2: Hyperparameters and Configuration.
Parameter Value
Number of Steps 5,760,000
Number of Processes 16
Model 2 hidden layers with
256 units each
Level Buffer Size 10,000
Replay Buffer Size 1e6
Learning Rate 3e-4
Update Interval 16000 step
Update Times 16000
Batch Size 256
Observation
Normalization
True
Reward Normalization True
5.1 Convergence of Each Algorithm
We initially demonstrate the performance of each
algorithm on the unmodified original environment
in Figure 1, with scores evaluated during training
at 16,000-step intervals and averaged over 10 roll-
outs. The results indicate that agents across all al-
gorithms successfully learn to achieve satisfactory
scores, with ACCEL demonstrating the highest aver-
age final score, though not significantly. Regarding
consistency and robustness, DR, PLR, PAIRED, and
CLUTR exhibit wider confidence intervals through-
out training, possibly due to continuous training on
newly generated levels (even PLR, despite its level re-
play buffer). In contrast, PLR⊥, which addresses this
issue with a more comprehensive level replay strat-
egy, displays a significantly narrower confidence in-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
138
terval, suggesting improved stability in training and
more consistent performance across different runs.
5.2 Transfer of Knowledge to
Challenging Scenario
To assess the performance of policies trained with
curriculum learning in unseen environments, we de-
signed increasingly challenging scenarios by gradu-
ally modifying key parameters. For most environ-
ments, we decreased the motor gear ratio to reduce
joint movement precision and torque, while increas-
ing gravity to impede body movement and increase
the likelihood of falling. These modifications effec-
tively increased the difficulty for all environments ex-
cept Swimmer-v5. For Swimmer-v5 specifically, we
increased viscosity instead of gravity to hinder its
movement, as gravity changes did not significantly af-
fect its performance. We created three levels of envi-
ronmental difficulty, detailed in Table 3, with Level 1
representing the easiest variation (parameters slightly
beyond the training range) and Level 3 being the most
challenging. This approach evaluates the robustness
and generalization capabilities of policies when faced
with progressively more demanding and unfamiliar
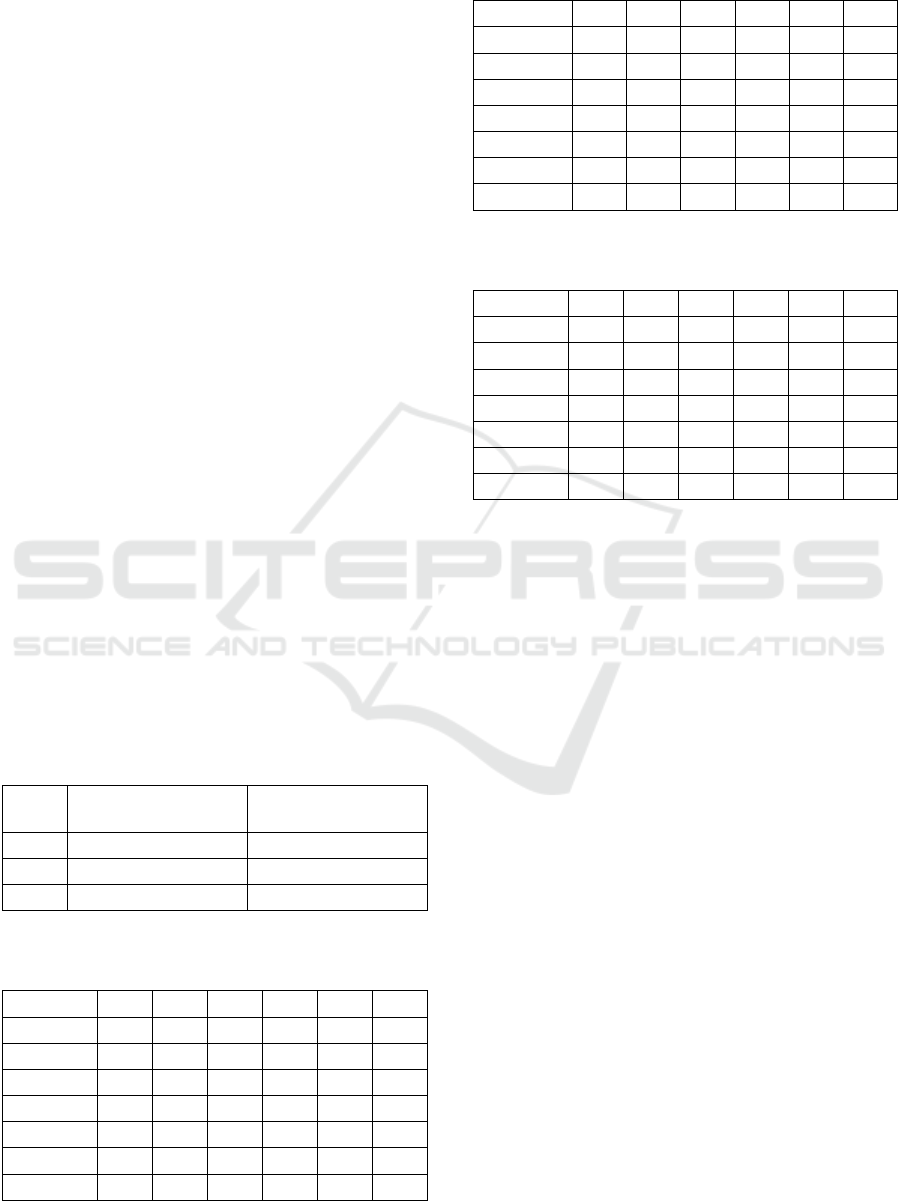
conditions. Tables 4, 5, and 6 present the results
for each difficulty level, with each value representing
an average from 50 rollouts generated by 5 models
(10 rollouts per model) trained with different random
seeds. For ease of analysis, we normalized the scores
so that the highest average score for each unmodified
environment is set to 1.0.
Table 3: Parameter modifications for different difficulty lev-
els. The percentages indicate changes applied to the original
values.
Level
Gravity/Viscosity
Change
Motor Gear Ratio
Change
1
+0% −22%
2
+11% −45%
3
+33% −45%
Table 4: Comparison of different methods across various
level 1 environments.
Cheet Ant Swim Hop Walk Hum
DR
0.91 0.92 0.93 0.92 0.93 0.92
PLR
0.92 0.91 0.92 0.95 0.92 0.91
PLR⊥
0.95 0.90 0.95 0.91 0.91 0.89
ACCEL
0.93 0.95 0.92 0.93 0.95 0.94
PAIRED
0.89 0.88 0.90 0.89 0.90 0.88
REPAIRED
0.90 0.89 0.91 0.90 0.91 0.90
CLUTR
0.87 0.86 0.88 0.87 0.88 0.86
Table 5: Comparison of different methods across various
level 2 environments.
Cheet Ant Swim Hop Walk Hum
DR
0.59 0.79 0.82 0.68 0.68 0.57
PLR
0.61 0.80 0.83 0.70 0.70 0.58
PLR⊥
0.63 0.82 0.86 0.71 0.72 0.59
ACCEL
0.65 0.83 0.85 0.72 0.74 0.60
PAIRED
0.60 0.78 0.81 0.67 0.67 0.56
REPAIRED
0.62 0.81 0.84 0.73 0.71 0.58
CLUTR
0.55 0.75 0.78 0.64 0.62 0.55
Table 6: Comparison of different methods across highly
challenging level 3 environments.
Cheet Ant Swim Hop Walk Hum
DR
0.28 0.32 0.35 0.30 0.29 0.22
PLR
0.31 0.36 0.38 0.33 0.32 0.24
PLR⊥
0.35 0.40 0.45 0.37 0.36 0.27
ACCEL
0.38 0.43 0.42 0.39 0.40 0.30
PAIRED
0.25 0.29 0.32 0.27 0.26 0.19
REPAIRED
0.33 0.38 0.40 0.41 0.34 0.25
CLUTR
0.20 0.23 0.25 0.21 0.20 0.14
For difficulty level 1, all methods maintain good
performance, most of them are able to maintain a per-
formance of above 90% of the original scores. Only
CLUTR drops below 0.90 for all environments. We
think the reason is that the original scores achieved
by these methods are lower, not due to unable to han-
dle distribution shift.
For difficulty level 2 and 3, ACCEL consistently
demonstrates superior performance in most scenar-
ios, particularly excelling in the HalfCheetah-v5,
Ant-v5, Walker2d-v5, and Humanoid-v5 environ-
ments. This superior performance can be attributed
to ACCEL’s unique approach of only editing part of
the parameters at the capacity frontier of the current
agent. By doing so, ACCEL can more efficiently find
other environment parameters that challenge the agent
at its current capacity, leading to better environment
generation efficiency. This targeted approach allows
ACCEL to generate diverse and challenging tasks that
promote robust learning more effectively than other
methods. Interestingly, PLR⊥ shows the best perfor-
mance in the Swimmer-v5 environment for both dif-
ficulty levels, indicating its effectiveness in this spe-
cific task. REPAIRED, on the other hand, consistently
outperforms other methods in the Hopper-v5 envi-
ronment, highlighting its strength in some particular
domain.
A notable observation is the significant drop in
performance scores between level 2 and level 3 envi-
ronments across all methods and tasks, underscoring
Beyond Discrete Environments: Benchmarking Regret-Based Automatic Curriculum Learning in MuJoCo
139
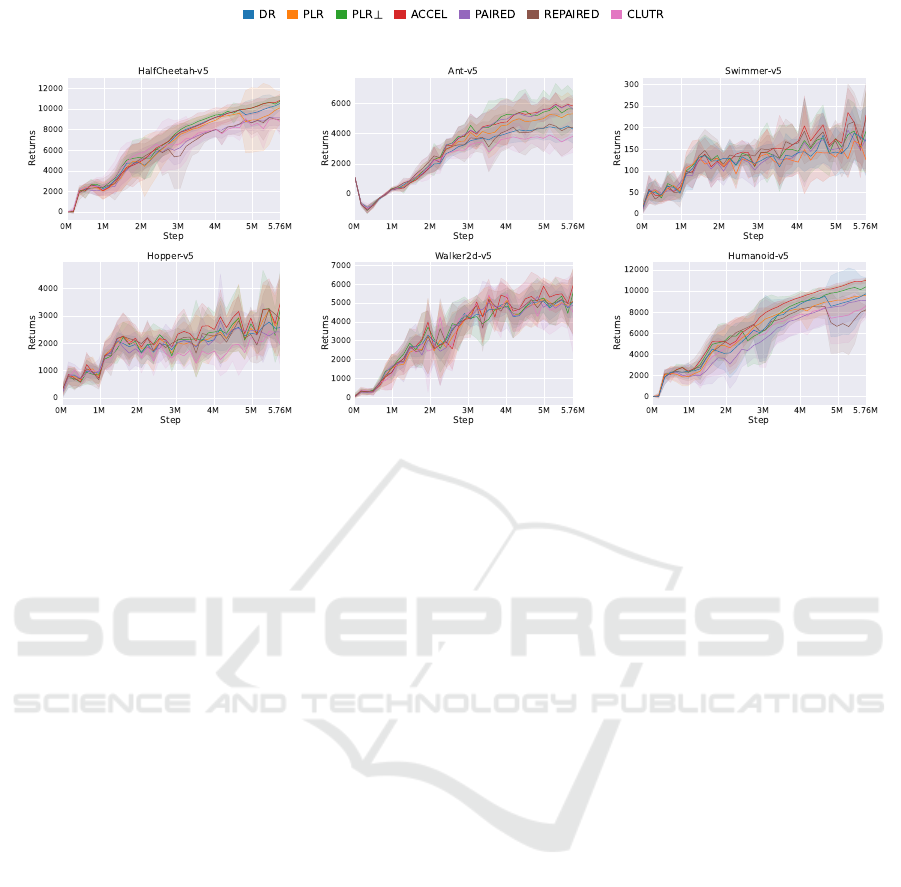
Figure 1: Learning Curves.
the substantially increased difficulty and the challenge
of maintaining high performance as task complex-
ity grows. Despite this overall decrease, the relative
performance rankings of different methods remain
largely consistent, with ACCEL, PLR⊥, and RE-
PAIRED maintaining their positions as top perform-
ers in their respective strong suits. ACCEL’s ability
to maintain its lead even in more challenging envi-
ronments further supports the effectiveness of its pa-
rameter editing strategy in finding the optimal balance
between challenge and learnability. It’s worth not-
ing that the CLUTR method consistently shows lower
performance compared to other approaches in both
difficulty levels, suggesting that while promising, it
may require further refinement (e.g., in VAE training)
to compete with more established UED methods in
these specific environments. Overall, the significant
performance drop in level 3 environments indicates
that there is still substantial room for improvement in
the robustness and generalization capabilities of cur-
rent UED approaches.
5.3 Level Parameter Trends
We illustrate the evolution of level parameters
throughout training in Fig. 2. To enhance the clar-
ity of these learning curves and mitigate data noise,
we applied the Savitzky-Golay filter with a window
size of 29 and a polynomial order of 3. Our obser-
vations reveal no significant differences among the
trends of the various algorithms, including ACCEL,
despite its superior performance relative to other al-
gorithms. Consistent with findings from previous
studies (Parker-Holder et al., 2022), the mean diffi-
culty for PAIRED and PLR algorithms does not ex-
hibit an apparent trend. Interestingly, our evaluation
shows that this lack of significant change extends to
the ACCEL algorithm as well in these MuJoCo envi-
ronments.
Two potential explanations emerge for this obser-
vation. First, in MuJoCo environments, the capac-
ity frontier may not consistently decrease or increase,
resulting in the absence of obvious trends in envi-
ronment parameters. Alternatively, these algorithms
may still have room for improvement in generating
a meaningful curriculum. This suggests that while
these methods demonstrate effectiveness in perfor-
mance, their approach to curriculum generation might
benefit from further refinement to produce more dis-
cernible parameter trends over the course of training.
6 DISCUSSION & CONCLUSION
Recent years have seen the proposal of various au-
tomatic curriculum learning methods, yet their ef-
fective application across a broad range of environ-
ments remains insufficiently tested. Our benchmark-
ing of these methods on MuJoCo environments, fea-
turing continuous action spaces more akin to real-
world robotic settings, reveals important insights into
their performance and limitations.
Our results demonstrate that while these auto-
matic curriculum learning methods generally outper-
form the baselines (i.e., DR, PLR), the performance
gains are less significant than initially anticipated.
This finding underscores the challenges of applying
these methods to more complex, continuous environ-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
140
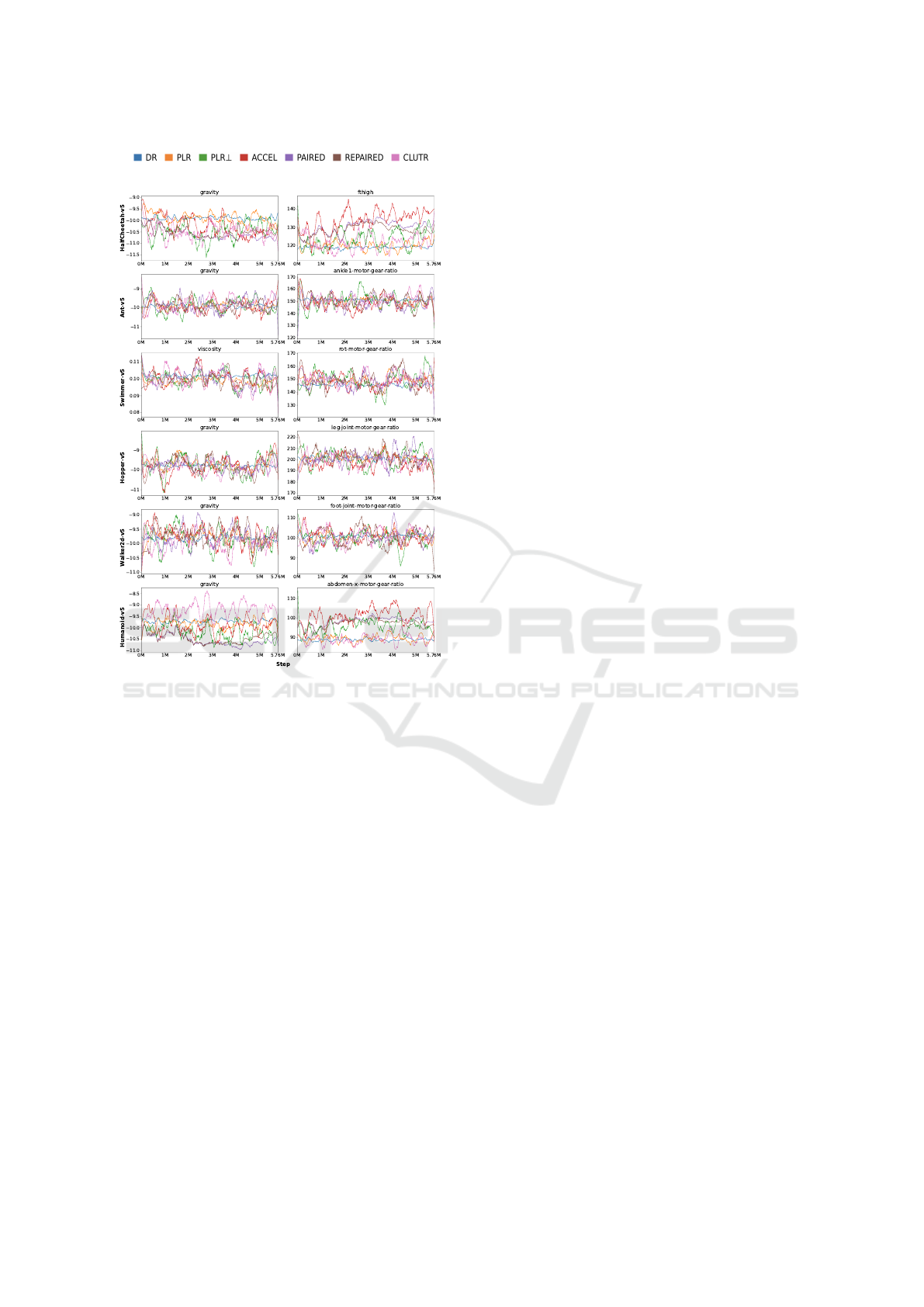
Figure 2: Level Parameters Throughout Training.
ments that closely resemble real-world scenarios.
Among the tested methods, ACCEL emerges as
a promising direction for improving automatic cur-
riculum learning. Its efficiency in finding new chal-
lenging environment settings stands out, suggesting
that its evolutionary-based approach to incrementally
increasing environment complexity is particularly ef-
fective. This targeted approach allows ACCEL to
generate diverse and challenging tasks that promote
robust learning more effectively than other methods.
PLR⊥ also shows promise, incorporating two key
modifications: not training on newly generated pa-
rameters and using a regret-based sampler. These
changes have yielded encouraging results, indicating
their potential for integration into future methods.
Our study reveals that these methods are less ef-
fective for continuous parameter spaces compared to
discrete ones. The vast diversity of parameter combi-
nations in continuous spaces poses a significant chal-
lenge for efficient exploration, highlighting the need
for more sophisticated exploration strategies tailored
to continuous domains.
A notable issue with these curriculum learning al-
gorithms is the substantial increase in environment in-
teractions required for agents to achieve robustness.
For the MuJoCo environments tested, this overhead
was 5.76 times the original value. While generaliz-
ing to unseen scenarios is inherently more challeng-
ing, this high overhead presents a significant barrier
to practical application. Developing methods that can
achieve generalization with lower sample complexity
could be a fruitful direction for future research.
The limitations exposed by our study underscore
the importance of expanding the range of environ-
ments used to test these algorithms. In particular,
there is a need to include more challenging tasks, es-
pecially those that are initially unsolvable, to evalu-
ate whether these methods can effectively break down
complex problems into learnable components.
In conclusion, while regret-based automatic cur-
riculum learning methods show promise in continu-
ous control tasks, there remains significant room for
improvement. Future work could focus on enhancing
the efficiency of these methods in continuous param-
eter spaces, reducing the sample complexity required
for robust learning, and demonstrating their effective-
ness in solving previously intractable problems. As
we continue to push the boundaries of reinforcement
learning towards more realistic and complex scenar-
ios, the development of more sophisticated and effi-
cient curriculum learning methods will play a crucial
role in advancing the field.
ACKNOWLEDGEMENTS
The authors acknowledge the use of the AI assistant
Claude 3.5 Sonnet, developed by Anthropic, PBC, to
enhance the readability and clarity of this manuscript.
The content and scientific contributions remain the
original work of the authors.
REFERENCES
Andrychowicz, M., Wolski, F., Ray, A., Schneider, J., Fong,
R., Welinder, P., McGrew, B., Tobin, J., Abbeel, P.,
and Zaremba, W. (2017). Hindsight experience re-
play. In Advances in Neural Information Processing
Systems, pages 5048–5058.
Arulkumaran, K., Deisenroth, M. P., Brundage, M., and
Bharath, A. A. (2017). Deep reinforcement learning:
A brief survey. IEEE Signal Processing Magazine,
34(6):26–38.
Azad, A. S., Gur, I., Emhoff, J., Alexis, N., Faust, A.,
Abbeel, P., and Stoica, I. (2023). Clutr: Curriculum
Beyond Discrete Environments: Benchmarking Regret-Based Automatic Curriculum Learning in MuJoCo
141

learning via unsupervised task representation learn-
ing. In Proceedings of the 40th International Con-
ference on Machine Learning, volume 202 of PMLR,
Honolulu, Hawaii, USA. PMLR.
Baranes, A. and Oudeyer, P.-Y. (2009). R-iac: robust in-
trinsically motivated exploration and active learning.
IEEE Transactions on Autonomous Mental Develop-
ment, 1(3):155–169.
Bengio, Y., Louradour, J., Collobert, R., and Weston, J.
(2009). Curriculum learning. In Proceedings of
the 26th annual international conference on machine
learning, pages 41–48. ACM.
Benjamins, C., Eimer, T., Schubert, F., Biedenkapp, A.,
Rosenhahn, B., Hutter, F., and Lindauer, M. (2021).
Carl: A benchmark for contextual and adaptive re-
inforcement learning. In Thirty-Fifth Conference on
Neural Information Processing Systems Datasets and
Benchmarks Track.
Cobbe, K., Hesse, C., Hilton, J., and Schulman, J. (2019a).
Leveraging procedural generation to benchmark rein-
forcement learning. arXiv preprint arXiv:1912.01588.
Cobbe, K., Klimov, O., Hesse, C., Kim, T., and Schulman,
J. (2019b). Quantifying generalization in reinforce-
ment learning. In International Conference on Ma-
chine Learning, pages 1282–1289. PMLR.
Dennis, M., Jaques, N., Vinitsky, E., Bayen, A., Russell,
S., Critch, A., and Levine, S. (2020). Emergent com-
plexity and zero-shot transfer via unsupervised envi-
ronment design. In Advances in Neural Information
Processing Systems, volume 33.
Dietterich, T. G. (2000). Hierarchical reinforcement learn-
ing with the maxq value function decomposition.
Journal of artificial intelligence research, 13:227–
303.
Florensa, C., Held, D., Geng, X., and Abbeel, P. (2018).
Automatic goal generation for reinforcement learning
agents. In Proceedings of the 35th International Con-
ference on Machine Learning, pages 1515–1528.
Florensa, C., Held, D., Wulfmeier, M., Zhang, M., and
Abbeel, P. (2017). Reverse curriculum generation
for reinforcement learning. In Conference on Robot
Learning, pages 482–495.
Graves, A., Bellemare, M. G., Menick, J., Munos, R.,
and Kavukcuoglu, K. (2017). Automated curriculum
learning for neural networks. In International confer-
ence on machine learning, pages 1311–1320. PMLR.
Haarnoja, T., Zhou, A., Abbeel, P., and Levine, S. (2018).
Soft actor-critic: Off-policy maximum entropy deep
reinforcement learning with a stochastic actor. In-
ternational Conference on Machine Learning, pages
1861–1870.
Held, D., Geng, X., Florensa, C., and Abbeel, P. (2018).
Automatic goal generation for reinforcement learn-
ing agents. In International Conference on Machine
Learning, pages 1515–1528. PMLR.
Jiang, M., Dennis, M., Parker-Holder, J., Foerster, J.,
Grefenstette, E., and Rockt
¨
aschel, T. (2021a). Priori-
tized level replay.
Jiang, M., Dennis, M., Parker-Holder, J., Foerster, J.,
Grefenstette, E., and Rockt
¨
aschel, T. (2021b). Replay-
guided adversarial environment design. In Ad-
vances in Neural Information Processing Systems,
volume 34, pages 1884–1897.
Juliani, A., Khalifa, A., Berges, V.-P., Harper, J., Teng, E.,
Henry, H., Crespi, A., Togelius, J., and Lange, D.
(2019). Obstacle tower: A generalization challenge
in vision, control, and planning. In Proceedings of
the Twenty-Eighth International Joint Conference on
Artificial Intelligence, pages 2684–2691. IJCAI.
Kingma, D. P. and Welling, M. (2013). Auto-encoding vari-
ational bayes. arXiv preprint arXiv:1312.6114.
Kirk, R., Zhang, A., Grefenstette, E., and Rockt
¨
aschel, T.
(2021). A survey of generalisation in deep reinforce-
ment learning. arXiv preprint arXiv:2111.09794.
Klink, P., D’Eramo, C., Peters, J., and Pajarinen, J.
(2020). Self-paced deep reinforcement learning. In
Advances in Neural Information Processing Systems,
volume 33. Curran Associates, Inc.
Klink, P., Yang, H., D’Eramo, C., Pajarinen, J., and Pe-
ters, J. (2022). Curriculum reinforcement learning via
constrained optimal transport. In Proceedings of the
39th International Conference on Machine Learning,
pages 11325–11344. PMLR.
Kulkarni, T. D., Narasimhan, K., Saeedi, A., and Tenen-
baum, J. (2016). Hierarchical deep reinforcement
learning: Integrating temporal abstraction and intrin-
sic motivation. Advances in neural information pro-
cessing systems, 29.
Li, Y. (2018). Deep reinforcement learning: An overview.
arXiv preprint arXiv:1701.07274.
Machado, M. C., Bellemare, M. G., Talvitie, E., Veness, J.,
Hausknecht, M., and Bowling, M. (2018). Revisiting
the arcade learning environment: Evaluation protocols
and open problems for general agents. Journal of Ar-
tificial Intelligence Research, 61:523–562.
Mnih, V., Kavukcuoglu, K., Silver, D., Rusu, A. A., Veness,
J., Bellemare, M. G., Graves, A., Riedmiller, M., Fid-
jeland, A. K., Ostrovski, G., et al. (2015). Human-
level control through deep reinforcement learning.
Nature, 518(7540):529–533.
Moulin-Frier, C., Nguyen, S. M., and Oudeyer, P.-Y. (2014).
Self-organization of early vocal development in in-
fants and machines: The role of intrinsic motivation.
Frontiers in Psychology, 5:1065.
Narvekar, S., Peng, B., Leonetti, M., Sinapov, J., Tay-
lor, M. E., and Stone, P. (2020). Curriculum learn-
ing for reinforcement learning domains: A framework
and survey. Journal of Machine Learning Research,
21(181):1–50.
OpenAI, Andrychowicz, M., Baker, B., Chociej, M., Joze-
fowicz, R., McGrew, B., Pachocki, J., Petron, A.,
Plappert, M., Powell, G., Ray, A., et al. (2020). Learn-
ing dexterous in-hand manipulation. The Interna-
tional Journal of Robotics Research, 39(1):3–20.
Osband, I., Doron, Y., Hessel, M., Aslanides, J., Sezener,
E., Saraiva, A., McKinney, K., Lattimore, T.,
Szepesv
´
ari, C., Singh, S., Van Roy, B., Sutton, R. S.,
Silver, D., and van Hasselt, H. (2020). Behaviour suite
for reinforcement learning. In 8th International Con-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
142

ference on Learning Representations, ICLR 2020, Ad-
dis Ababa, Ethiopia.
Parker-Holder, J., Jiang, M., Dennis, M., Samvelyan, M.,
Foerster, J., Grefenstette, E., and Rockt
¨
aschel, T.
(2022). Evolving curricula with regret-based environ-
ment design.
Plappert, M., Andrychowicz, M., Ray, A., McGrew, B.,
Baker, B., Powell, G., Schneider, J., Tobin, J.,
Chociej, M., Welinder, P., et al. (2019). Solv-
ing rubik’s cube with a robot hand. arXiv preprint
arXiv:1910.07113.
Portelas, R., Colas, C., Hofmann, K., and Oudeyer, P.-
Y. (2019). Alp-gmm: Active learning of prioritized
skills. Proceedings of the AAAI Conference on Artifi-
cial Intelligence, 33(1):3796–3803.
Portelas, R., Colas, C., Hofmann, K., and Oudeyer, P.-Y.
(2020). Teacher algorithms for curriculum learning of
deep rl in continuously parameterized environments.
In Conference on Robot Learning, pages 835–853.
PMLR.
Romac, C., Portelas, R., Hofmann, K., and Oudeyer, P.-
Y. (2021). Teachmyagent: a benchmark for auto-
matic curriculum learning in deep rl. arXiv preprint
arXiv:2103.09815.
Schulman, J., Wolski, F., Dhariwal, P., Radford, A., and
Klimov, O. (2017). Proximal policy optimization al-
gorithms. arXiv preprint arXiv:1707.06347.
Silver, D., Hubert, T., Schrittwieser, J., Antonoglou, I., Lai,
M., Guez, A., Lanctot, M., Sifre, L., Kumaran, D.,
Graepel, T., et al. (2018). A general reinforcement
learning algorithm that masters chess, shogi, and go
through self-play. Science, 362(6419):1140–1144.
Sukhbaatar, S., Lin, Z., Kostrikov, I., Synnaeve, G., Szlam,
A., and Fergus, R. (2018). Intrinsic motivation and
automatic curricula via asymmetric self-play. In In-
ternational Conference on Learning Representations.
Taylor, M. E. and Stone, P. (2009). Transfer learning for
reinforcement learning domains: A survey. Journal of
Machine Learning Research, 10(7):1633–1685.
Tobin, J., Fong, R., Ray, A., Schneider, J., Zaremba, W., and
Abbeel, P. (2017). Domain randomization for trans-
ferring deep neural networks from simulation to the
real world. In IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS).
Todorov, E., Erez, T., and Tassa, Y. (2012). Mujoco:
A physics engine for model-based control. 2012
IEEE/RSJ International Conference on Intelligent
Robots and Systems, pages 5026–5033.
Towers, M., Kwiatkowski, A., Terry, J., Balis, J. U.,
De Cola, G., Deleu, T., Goul
˜
ao, M., Kallinteris, A.,
Krimmel, M., KG, A., et al. (2024). Gymnasium: A
standard interface for reinforcement learning environ-
ments. arXiv preprint arXiv:2407.17032.
Wang, R., Lehman, J., Clune, J., and Stanley, K. O.
(2019). Paired open-ended trailblazer (poet): End-
lessly generating increasingly complex and diverse
learning environments and their solutions. arXiv
preprint arXiv:1901.01753.
Beyond Discrete Environments: Benchmarking Regret-Based Automatic Curriculum Learning in MuJoCo
143
