
Geometry and Texture Completion of Partially Scanned 3D Objects
Through Material Segmentation
Jelle Vermandere
a
, Maarten Bassier
b
and Maarten Vergauwen
c
KU Leuven, Belgium
{jelle.vermandere, maarten.bassier, maarten.vergauwen}@kuleuven.be
Keywords:
Indoor 3D, Mesh Geometry Models, Texturing.
Abstract:
This work aims to improve the geometry and texture completion of partially scanned 3D objects in indoor
environments through the integration of a novel material prediction step. Completing segmented objects from
these environments remains a significant challenge due to high occlusion levels and texture variance. State-
of-the-art techniques in this field typically follow a two-step process, addressing geometry completion first,
followed by texture completion. Although recent advancements have significantly improved geometry com-
pletion, texture completion continues to focus primarily on correcting minor defects or generating textures
from scratch. This work highlights key limitations in existing completion techniques, such as the lack of
material awareness, inadequate methods for fine detailing, and the limited availability of textured 3D object
datasets. To address these gaps, a novel completion pipeline is proposed, enhancing both the geometry and
texture completion processes. Experimental results demonstrate that the proposed method produces clearer
material boundaries, particularly on scanned objects, and generalizes effectively even with synthetic training
data.
1 INTRODUCTION
Dynamic 3D scanned indoor environments are in-
creasingly in demand within the gaming industry and
the Architecture, Engineering, Construction, and Op-
erations (AECO) sectors (Vermandere et al., 2022).
Like digitally created assets, these environments con-
sist of collections of digital objects that can be inter-
acted with (e.g., by modifying or removing objects) or
utilized in computations (e.g., volumetric analysis).
3D scanned environments are typically captured
as a whole, not only for efficiency but also for cost-
effectiveness. However, when isolating an object
from a scene, it is often incomplete due to occlu-
sions and contact with other objects. This missing
information presents a significant bottleneck, as the
aforementioned applications require complete object
data for both geometry and texture (Vermandere et al.,
2023). As a result, there is an urgent need for com-
pletion methods. Traditionally, geometry and tex-
ture completion, typically represented as polygonal
meshes, is performed through interpolation. With re-
cent advancements in machine learning and neural
a
https://orcid.org/0000-0002-7809-9798
b
https://orcid.org/0000-0001-8526-8847
c
https://orcid.org/0000-0003-3465-9033
networks, it is now possible to probabilistically pre-
dict these outputs (Mittal et al., 2022). Meshes pro-
vide a lightweight and scalable representation of 3D
scene data, making them effective for scanned envi-
ronments as they can achieve a similar level of detail
to point clouds, while retaining highly detailed texture
representations.
Current state-of-the-art (SOTA) techniques typi-
cally divide the completion process into two stages,
beginning with geometry completion, followed by
texture completion. In recent years, significant re-
search has focused on geometry completion (Liu
et al., 2023; Lin et al., 2022; Gao et al., 2020; Zhou
et al., 2021; Chibane et al., 2020), while research on
texture completion has also gained increasing popu-
larity (Cheng et al., 2022; Oechsle et al., 2019; Sid-
diqui et al., 2022; Lugmayr et al., 2022). However,
existing texture completion methods are primarily fo-
cused on either restoring minor defects (Maggior-
domo et al., 2023) or generating complete textures
from scratch (Siddiqui et al., 2022; Richardson et al.,
2023).
Texture completion is currently achieved through
texture inpainting techniques. However, these meth-
ods are often limited to filling very small missing re-
gions (Maggiordomo et al., 2023), which results in
Vermandere, J., Bassier, M. and Vergauwen, M.
Geometry and Texture Completion of Partially Scanned 3D Objects Through Material Segmentation.
DOI: 10.5220/0013120000003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 1: GRAPP, HUCAPP
and IVAPP, pages 193-202
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
193

blurry outputs when applied to larger gaps, or they
lack fine details due to the limited spatial resolution
of 3D inpainting techniques (Chibane et al., 2020).
Additionally, deploying trained models on real-world
captured data frequently leads to lower-quality re-
sults, as many machine learning models are predom-
inantly trained on synthetic data. This discrepancy
creates a gap between training data and real-world in-
puts.
The goal of this work is to improve both the ge-
ometry and texture completion on partially scanned
meshes. Specifically, the proposed method predicts
both the missing polygonal mesh faces and textures
of objects segmented from 3D scanned environments.
The procedure still treats geometry and texture sep-
arately. By splitting the texture completion process
into a material prediction and texture inpainting step,
as shown in Figure 1, the material boundaries can be
more clearly defined. This gives the texture inpainting
module a clear inpainting and reference area, which
improves the final results. This also allows the usage
of synthetic training data for the 3D material predic-
tion step, as no real textures are needed. The realistic
textures can then be inpainted on the 2D texture map
of the object.
The insertion of the novel material prediction step
in the object completion pipeline abstracts the texture
inpainting process allowing better real-world results
while still using synthetic material datasets.
2 BACKGROUND AND RELATED
WORK
In this section, the state-of-the-art of the three main
steps in the completion pipeline are discussed.
2.1 Geometry Completion
Mesh completion is a challenging task because
meshes have no fixed input size, which is a require-
ment of machine learning networks. Some mod-
els aim to overcome this by using a retrieval-based
method (Gao et al., 2023; Siddiqui et al., 2021) which
aims to replace the partial data with existing models
from a library.However, this limits the generality of
the objects that can be completed. This is why most
works convert the meshes to either point clouds or
Signed Distance Fields (SDFs).
Point-based geometry completion like Point-
Voxel Diffusion (Zhou et al., 2021) uses a normalized
point cloud as input to predict the final shape through
3D diffusion. On the other hand, IF-Nets (Chibane
et al., 2020) use implicit features generated from the
point cloud to predict the missing points. While these
models can provide good results, the point cloud sam-
pling can lead to a loss of detail in very dense ar-
eas and struggles with large missing parts, something
which is very common in incomplete scanned objects.
SDFs are an implicit representation of a 3D shape.
They define a function which represents the distance
to the boundary of the object from any point in space.
They are signed because they also define whether a
point is inside or outside the object. An SDF can be
voxelised to create a fixed amount of distances. These
have become a popular input type due to their clear
boundary definition. Models like AutoSDF (Mittal
et al., 2022) are able to encode the SDFs and, by high-
lighting the voxels in the incomplete regions, can pre-
dict the missing geometry. SD Fusion (Cheng et al.,
2022) builds upon this by allowing multiple input
types to guide the generation simultaneously like text
prompts or images. Because of the encoding, these
can be used to generate a complete shape based on
a very small existing part. Models like PatchCom-
plete (Rao et al., 2022) split the SDF into multiple
smaller parts to increase its generalizability, while
DiffComplete (Chu et al., 2023) uses a diffusion-
based approach to allow for a higher flexibility of in-
puts. While SDFs result in decreased resolution due
to the voxelisation, they are much better at retain-
ing the surface definition of the object compared to
point clouds. Non-watertight meshes can be difficult
to convert to an SDF due to the ambiguity of what is
inside and what is not. Jacobson et al.(Jacobson et al.,
2013) aims to solve this by generalizing the winding
number for arbitrary meshes, however, this method
lacks when large parts of the mesh are missing. To
handle real-world incomplete scanned objects, Un-
signed Distance Fields (UDFs) can be used as a more
generalized representation which only defines the ab-
solute distance to the object. These can be generated
for arbitrary meshes and are compatible with geome-
try completion networks like AutoSDF. Therefore, we
use the UDF representation of incomplete meshes and
complete them using AutoSDF.
2.2 Texture Completion
A challenge when trying to complete the texture of
a 3D mesh using its 2D texture map is the incon-
sistent layout of the UV texture map, where adja-
cent 3D faces are not always adjacent in 2D. De-
spite works like (Maggiordomo et al., 2021) trying
to improve this, this is still a field of ongoing re-
search. TUVF (Cheng et al., 2023) aims to create a
standard UV layout for each object class, making it
much easier to generate consistent textures for an ob-
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
194
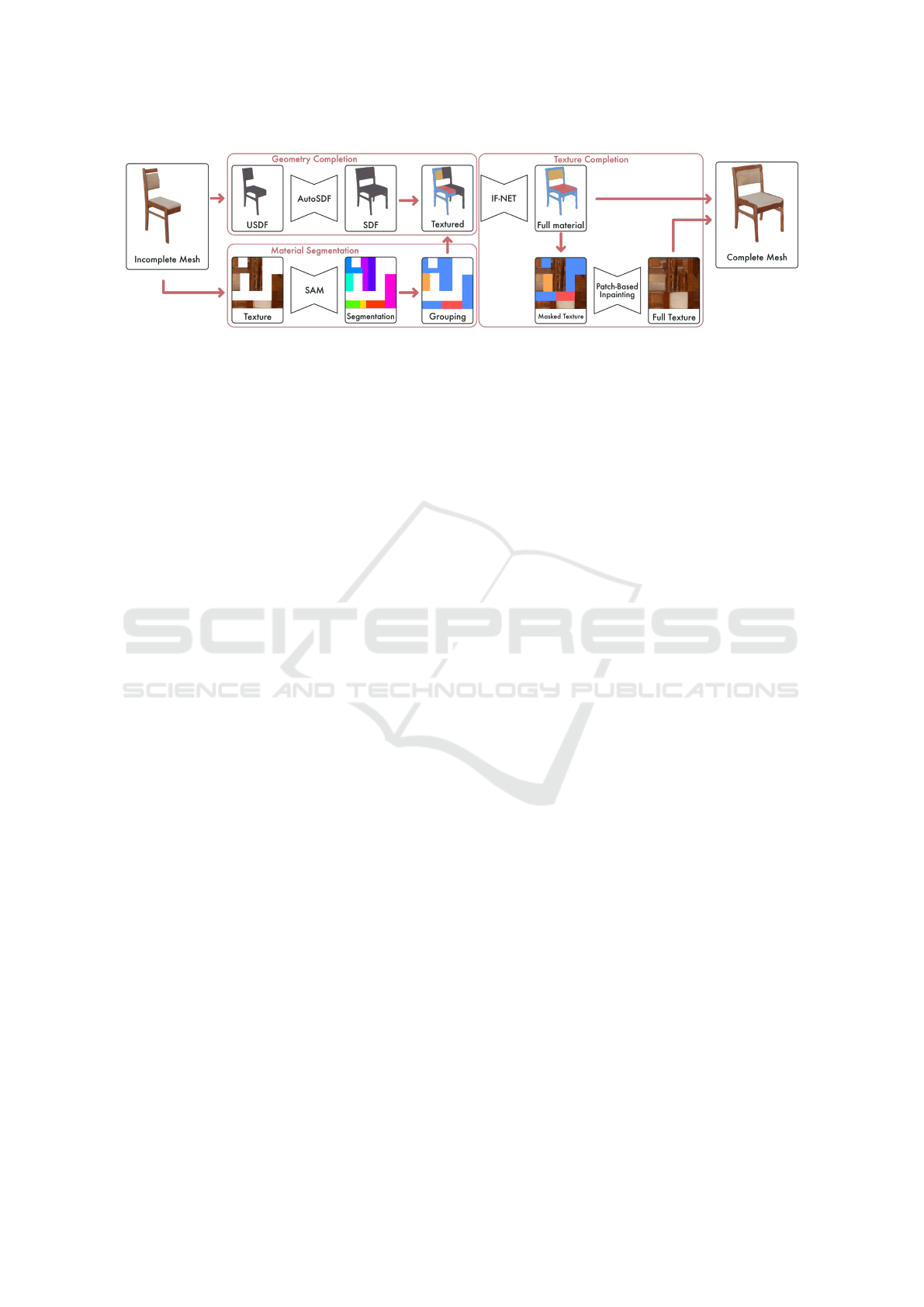
Figure 1: Overview of the object completion pipeline, starting with an incomplete mesh (left), featuring the parallel geometry
completion and material segmentation (center-left), followed by the texture completion (center-right) to result in a completed,
textured mesh.
ject. This creates a much more predictable inpainting
region but severely limits the geometric variation in
the objects. Texture Inpainting for Photogrammetric
Models (Maggiordomo et al., 2023) aims to overcome
this by focusing on smaller patches that are dynami-
cally unwrapped on the texture map. This minimizes
distortion and ensures that the surrounding reference
area is consistent. For larger areas, works like Image
quilting for texture synthesis and transfer (Efros and
Freeman, 2001) use an input sample to learn how to
inpaint the missing parts leading to very consistent re-
sults in distinct materials. When provided with a clear
reference area of a single material, these models per-
form very well. Instead of inpainting directly on the
uv map, TEXTure (Richardson et al., 2023) generates
2D textured renders of the object from different view-
points using diffusion and projects them on the object.
Circumventing the need for a clean uv map.
Recent works like Texture Fields (Oechsle et al.,
2019) have tried to tackle the texture generation in
a similar way compared to the geometry generation,
by encoding the texture in 3D space instead of on
the 2D plane. This has lead to a number of other
works like Texturify (Siddiqui et al., 2022) uses tex-
ture fields to generate plausible textures for certain
object classes. SD Fusion (Cheng et al., 2022) is able
to directly colorize the generated geometry by using
text prompts. While these models do not take the ex-
isting partial textures into account, the introduction of
Texture Fields has lead to networks like IF-Net Tex-
ture (Chibane and Pons-Moll, 2020), which uses par-
tially colored point clouds to predict the remaining,
uncolored points. The point-wise structure limits the
spatial resolution which can be too low for fine de-
tails, leading to unclear boundaries of the different
materials. Similar to Image Quilting (Efros and Free-
man, 2001), this method can greatly benefit from a
clear material boundary and is therefore implemented
in our framework as texture completion network.
Point-UV Diffusion (Yu et al., 2023) aims to com-
bine the two texture generation methods by working
in a two-step process. First, a coarse 3D point-wise
texture is generated. Second, a fine 2D texture map
inpainting is performed based on the point colors.
TSCom-Net (Karadeniz et al., 2022) uses the same
method, but also focuses on texture completion. The
completed 3D texture is projected back on a texture
map and the coarse color is used to inpaint finer de-
tail directly on the texture. While this improves the
detail in the texture, the fuzzy edges of the materials
still lead to inconsistent results.
2.3 Material Detection
The different materials of an object can be detected,
both in 2D and 3D. In 2D, material differences can be
detected on the texture map using image segmentation
models like Segment Anything Model (SAM) (Kir-
illov et al., 2023) which can detect distinct objects
or textures by determining large similar areas in the
image. Materialistic (Sharma et al., 2023) special-
izes in detecting similar materials in a single im-
age, however, does not allow for much granularity
in the matching process. Other works aim to seg-
ment the object based on an image of their 3D ap-
pearance using Material-Based Segmentation of Ob-
jects (Stets et al., 2019) creating a view-based seg-
mentation. Some reflective materials can be hard to
segment because they reflect the environment, result-
ing in visually confusing images. Multimodal Mate-
rial Segmentation (Liang et al., 2022) uses multiple
camera types like RGB, near-infrared and polarized
images to further improve the detection rate of these
materials.
In 3D, models like TextureNet (Huang et al.,
2018) leverage the color of the feature points in a
3D scene to create more distinct feature vectors, im-
proving the segmentation results. This also allows
the model to segment the different materials in a sin-
gle object. These material segmentation techniques
Geometry and Texture Completion of Partially Scanned 3D Objects Through Material Segmentation
195

are underused to aid the texture inpainting process.
Therefore, we aim to use a similar technique to seg-
ment the objects on a sub-material level.
3 METHODOLOGY
The presented method (Figure 1) follows the SOTA
approach to separate the geometry and texture com-
pletion. First, the missing geometry is predicted from
the geometric inputs by utilizing implicit shape rep-
resentations (Mittal et al., 2022). In addition, the
mesh textures are analyzed, and material informa-
tion for the meshes is computed based on image seg-
mentation. Second, these results are integrated, and
the missing materials are predicted using the texture
generation network, IF-Net (Chibane and Pons-Moll,
2020). In the final step, a detailed inpainting of the
missing regions is conducted, utilizing both shape and
material information to complete the mesh represen-
tation. This process results in a comprehensive pre-
diction of the object’s shape and appearance, that can
be rendered in photorealistic detail.
3.1 Geometry Completion
The first step in the geometry prediction is the pre-
processing of the mesh geometry to a suitable im-
plicit shape representation i.e. a continuous volumet-
ric field. In the literature, SDFs are typically used as
it can be easily discretised into a voxel raster with a
fixed number of distances, which is compatible with
CNN architectures (Mittal et al., 2022). However, as
explained in the related work, conventional SDF as-
sume the shape to be watertight, which is not the case
for our geometry prediction. Instead, we employ a
UDF to voxelise the mesh geometries. Concretely,
we employ a dual octree graph as proposed by (Wang
et al., 2022) with 128
3
resolution to represent the ge-
ometry (Figure 2). Then, we use the open edges of
the incomplete mesh surface to indicate the voxels for
which a prediction must be computed. As shape com-
pletion networks currently only operate on geometries
that are positioned symmetrically and centered, we
also perform a grounding and symmetrisation step to
optimize the objects’ position based on (Sipiran et al.,
2014).
Next, the UDF is fed to a shape prediction
model that samples vertices in the highlighted vox-
els. Specifically, we adjust the VQ-VAE autoregres-
sive model proposed in AutoSDF (Mittal et al., 2022)
to predict the distribution over the latent representa-
tion of 3D shapes and solve it for shape completion
(Eq. 1). The voxel selection process has been further
Figure 2: The incomplete mesh (left) and the meshed UDF
(right).
refined, to allow for a more granular selection. This
allows us to better define the correct parts of the par-
tially scanned object. This can be formulated as the
conditional probability optimisation of k number of
possible solutions of the 3D shape X given the par-
tially observed shape X
p
, which are expressed as a set
of latent variables O = {z
g
1
,z
g
2
,...,z
g
k
} that are fac-
torized to model the distribution over the latent vari-
ables Z (see VQ-VAE and AutoSDF for more details).
P(X|X
p
) ≈ p(Z|O) =
∏
j>k
p
θ
(z
g
j
|z
g
< j
,O)
(1)
The network returns a number of possible solu-
tions. The best option is selected based on the clos-
est fitting geometry to the original incomplete edges
based on the Euclidean distance of the vertices. Note
that due to the encoding, the SDF representation was
compressed and thus the overlap between the origi-
nal edges and the sampled edges can be evaluated.
To convert the object back into a mesh, we employ
marching cubes (Lorensen and Cline, 1998). The re-
sult is a watertight polygonal mesh geometry with a
topological correct fit between the original and the
predicted geometries (Figure 3).
Figure 3: Meshed representations of the incomplete UDF
(left) and the completed SDF (right).
3.2 Material Segmentation
Similar to the geometry completion, the different ma-
terials of the objects are identified to produce the in-
puts for the final texture prediction. Specifically, we
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
196

compute indices for each distinct material in the ob-
ject. First, we segment the different texture regions
from the texture images of the objects. However, UV
maps generated from scanned objects are not ideal for
this purpose as these are typically optimised to min-
imize the texture footprint and maximise each trian-
gle separately. As a result, there is no topological re-
lationship between the adjacent pixels in the texture
image compared to the 3D geometry. To counteract
this, we re-unwrap each object’s texture to preserve
this topology while keeping connected parts together
(Figure 4). Building on previous works (Verman-
dere et al., 2024), this is done by performing a part-
wise semantic segmentation (Sun et al., 2022), which
splits the object into smaller geometrically more basic
parts using 3D semantic instance segmentation. Each
part is then unwrapped using Blender’s unwrapping
API (Flavell, 2010) with the Angle Based Flattening
(ABF) (Chen et al., 2007) algorithm.
The resulting unwrapped texture images are then
processed by an image segmentation network. Specif-
ically, we transfer the zero-shot segmentation of the
Segment Anything Model (SAM) (Kirillov et al.,
2023) to our dataset. SAM is a powerful encoder-
decoder network trained on over 1.1 billion masks and
shows promising results for zero-shot generalization.
The result is set of patches containing a large number
of disjoint instances of the different materials.
Figure 4: Overview texture preprocessing: (left) The origi-
nal UV layout and (right) the re-unwrapped UV layout op-
timised for geometric topology.
Second, these patches P
set
are grouped per dis-
tinct material set S
set
. To this end, the cosine similar-
ity is evaluated between the image feature vectors f
P
i
of each patch, which are derived from the Efficient-
Net (Tan and Le, 2019) network, given a matching
threshold t
c
. The unique set
S
n
i=1
S
i
of the grouped
patches are then used to assign a unique material in-
dex to each S
i
(Figure 5) as shown in Eq. 2.
S
set
=
n
[
i=1
(
S
i
= {P
i
,P
j
}
∀P
i
,P
j
∈ P
set
:
f
P
i
· f
P
j
∥ f
P
i
∥∥ f
P
j
∥
≥ t
c
)
(2)
Next, the material indices are assigned to the par-
tial mesh. However, because the 2D boundaries of
the material patches do not necessarily align with the
3D mesh edges, an additional mesh refinement step
is performed. Based on previous work (Vermandere
et al., 2023), the boundaries S
set
between texture ma-
terials are baked as new edges in the mesh, and dupli-
cate the involved vertices, so that each face shares the
same material in its three vertices. This ensures that
each material can be completely isolated in 3D with
only a face selection.
Figure 5: Overview of the texture segmentation using the
Segment Anything Model (SAM) and subsequent clustering
of the different patches through cosine similarity.
3.3 Texture Completion
For the texture completion, we again employ an im-
plicit representation that can be trained and decoded
to predict color information of the missing parts. As
we want the texture prediction to be shape sensitive,
we retain the spatial encoding of the 3D geometry
and expand it with additional color channels. Specif-
ically, our work expands upon IF-Net (Chibane and
Pons-Moll, 2020) which extracts a learnable multi-
scale tensor of deep features from a spatial encoding
of both shape and appearance. Concretely, we first
assign the generic segmented material index labels to
the completed mesh geometry. Each segment is given
a unique color based on its index. Each index is en-
coded as a combination in three binary channels. En-
abling the network to generate up to 8 materials per
object. This ensures maximum separation between
different materials to minimize potential confusion in
the network.
Second, the partially textured mesh is sampled as
a point cloud due to IF-Nets point-based encoding.
The same voxel grid is employed as during the shape
geometry completion. To generate the deep features
grids F
k
, it subsequently convolutes the point cloud
with learned 3D convolutions while decreasing the
resolution. These features are then passed to the de-
coder f (.), which predicts the point and material in-
dex values at the grid intervals (Eq. 3) (Chibane and
Geometry and Texture Completion of Partially Scanned 3D Objects Through Material Segmentation
197

Pons-Moll, 2020).
f (F
k
) : F
1
× ... × F
n
→ [0,1]
(3)
Given the material indices, the final step is to com-
pute the detailed textures for the complete mesh. To
this end, we leverage patch-based inpainting (Efros
and Freeman, 2001). Because it only uses the sur-
rounding image for reference, the results can be more
faithful to the original data compared to more recent
generative approaches as it does not suffer from hal-
lucinations. First, the UV layout of the original par-
tial mesh is aligned with the newly created UV lay-
out of the completed geometry. To achieve this, we
project the original textures onto the completed ge-
ometry and unwrap it together with the material in-
dices. Iteratively, all the patches in a material set
P ∈ S
i
are used as reference samples to compute the
average texture for the new regions (Figure 6), while
P /∈ S are masked out. For every new patch, arbitrary
square blocks {B
1
,B
2
,...,B
n
} from S
i
are merged to-
gether with overlap to synthesize a new texture sam-
ple P
′
. The best fit cut between each two overlap-
ping blocks is retrieved by minimizing neighboring
contrasts e
i j
= f (B
i
,B
j
). The minimal cut is then ob-
tained by traversing all cuts and computing the cumu-
lative minimum error E for each block (Eq. 4).
E
i j
= e
i j
+ min(E
i−1, j−1
,E
i−1, j
,E
i−1, j+1
).
(4)
Figure 6: The inpainting process where each material is in-
painted separately.
4 EXPERIMENTS
In this section, we will first discuss the dataset used,
then the training of our models and finally discuss the
results of our experiments.
4.1 Dataset Preprocessing
Two datasets are used for the experiments. ShapeNet-
Core (Chang et al., 2015) is a synthetic object library
that we use for training and validation. It contains
55 common object categories like chairs, benches and
tables, with about 51.300 unique 3D models. It is a
good training dataset since it both contains the com-
pleted geometries and also the material indices for the
textures so both the AutoSDF and IF-Net have correct
ground truth data.
On the other hand, Matterport (Chang et al., 2017)
is a scanned dataset that we use for the evaluation.
It consists of 90 fully textured building-scale scenes,
with each between 15-30 objects that can be seg-
mented and completed (Figure 7). It is ideally suited
to investigate the domain-transfer capabilities of the
network to deal with realistic textures and incom-
plete geometries. No ground truth is available for this
dataset so a visual study is made of the resulting re-
constructions.
A relevant subselection is made from both datasets
for the experiments. The AutoSDF training dataset is
generated by converting the meshes to a normalised,
aligned 128
3
SDF grid as discussed in section 3.1.
The IF-Net input data is created by separating each
submesh and giving it a material index. Each mesh
is sampled to a colored point cloud from which 4 in-
complete variations are created by randomly remov-
ing parts of the point cloud. These four incomplete
colored point clouds, along with the uncolored com-
plete point cloud are used as the training input.
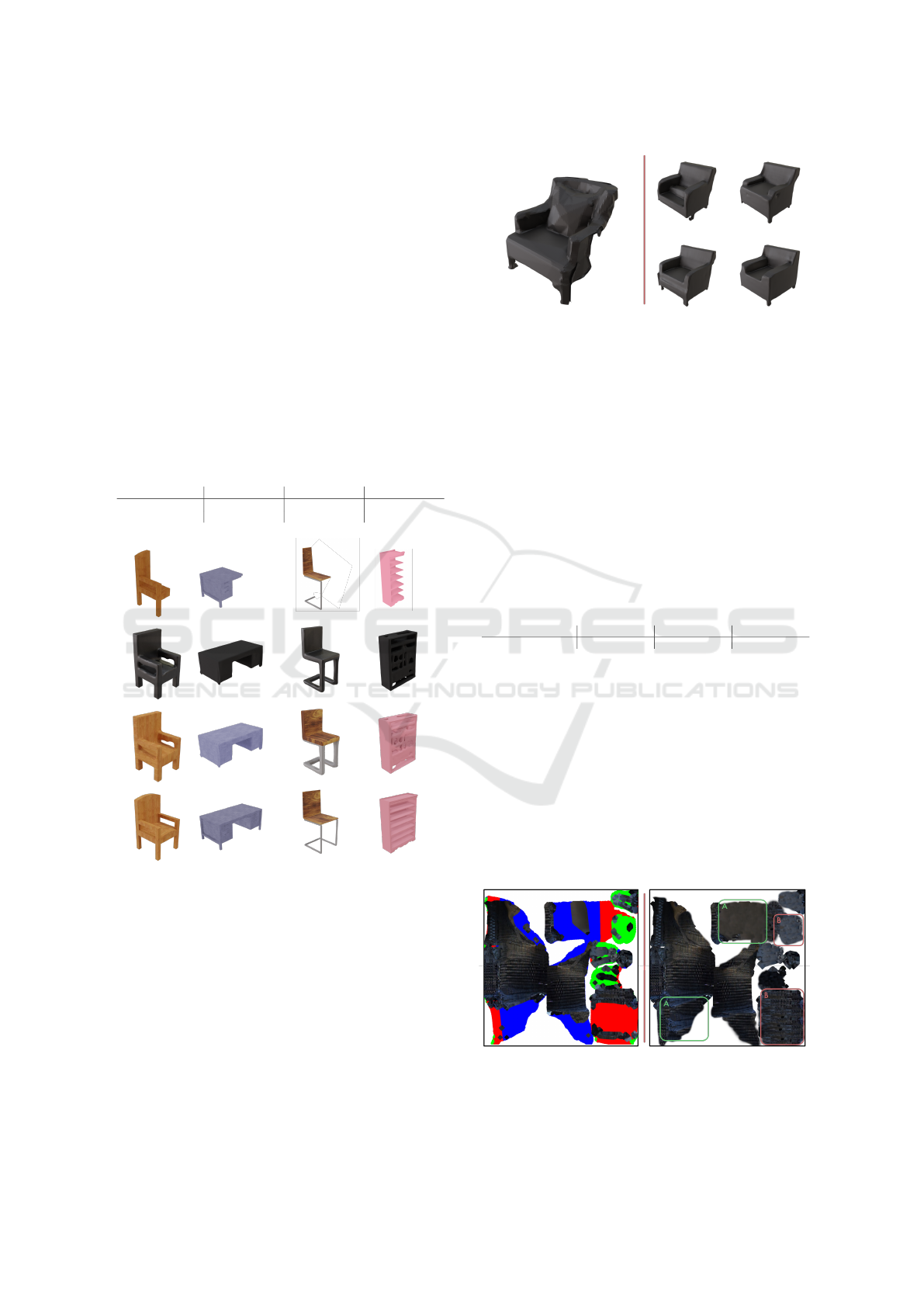
Figure 7: Examples of isolated objects from the Matterport
dataset with varying occlusions and shapes.
4.2 Training
For AutoSDF and SAM, we use the pre-trained mod-
els available to the public because they are trained on
relevant datasets. However, the IF-Net was retrained
using the Adam optimizer with a learning rate of 10
−4
for 1000 epochs with a minimal loss of 65.81 using
our custom dataset. The query points for the train-
ing data are obtained by sampling the ground truth
for 100,000 points. The partial scans are voxelised by
sampling 100,000 points from the partial surface and
setting the occupancy value in the nearest voxel grid
to 1. Similarly, for the colored voxelisation, the value
of the nearest voxel is set to the three-channel value
of the corresponding material index.
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
198
4.3 Results
4.3.1 Geometry Completion
For the geometry completion using AutoSDF, the val-
idation is performed by completing the objects from
the ShapeNet dataset (Figure 8) at different levels of
completeness. Table 1 shows the resulting average
MIOU and Chamfer distance of the dataset. Each
object is completed with 25%, 50% and 75% of the
original mesh remaining. These result show that the
MIOU and Chamfer distance increase when more of
the original mesh is present. There is, however, still a
loss in accuracy due to the voxel-based SDF conver-
sion, leading to lower MIOU.
Table 1: The MIOU of and Chamfer Distance on the
ShapeNet Core v2 dataset, completed at 25, 50 and 75%
respectively.
Shapenet Core v2 25% completion 50% completion 75% completion
MIOU 25.26% 54.14% 62.17%
Chamfer Distance 0.09 0.06 0.06
Figure 8: The results from the ShapeNet Core dataset. The
rows show the partial inputs, the completed geometry, the
final output and the the ground truth.
For the Matterport data, we focus on the visual fi-
delity and accuracy. Since the completion uses a VQ-
VAE network, multiple probable solutions are gener-
ated, as seen in Fig 9. There is a large variety in pro-
posed solutions due to the large and detailed voxel
selection necessary because the UDFs can be hollow
in the missing areas. The best option is determined
based on the largest overlap with the original incom-
plete mesh.
Figure 9: Examples of the multiple results returned from
AutoSDF geometry completion with the input UDF (left)
and four possible outputs (right).
4.3.2 Material Prediction
The material prediction is validated by calculating the
percentage of correctly predicted points as seen in Ta-
ble 2. The IF-Net can accurately predict the correct
material index if the materials are all present in the
partial scan. It does not introduce new materials, lead-
ing to lower correctness percentages at the lower com-
pletion levels. For smaller defects or missing parts,
the material mostly stays consistent.
Table 2: The average material prediction accuracy on the
ShapeNet Core v2 dataset, completed at 25, 50 and 75%
respectively.
ShapeNet Core V2 25% completion 50% completion 75% completion
Material Correctness 60,56% 80,78% 92.07%
The material completion returns good results on
the Matterport data for large uniform areas as seen in
Figure 10, where the highlighted areas A get a much
better result due to a larger reference area. The high-
lighted B areas have a limited amount of reference
area, so they have a very clear repeating pattern. SAM
often overly segments because of color artifacts in
the original scans, leading to a very high number of
patches. Its drawback is that it is impossible to define
a single cosine similarity threshold to group the dif-
ferent patches. Therefore, we adapt the threshold to
fit the 8-materials constraint.
Figure 10: The inpainting results (right) with the partial tex-
ture (left). highlighted areas ”A”and ”B” indicate good and
poor results respectively.
Geometry and Texture Completion of Partially Scanned 3D Objects Through Material Segmentation
199

4.3.3 Texture Inpainting
The performance of the texture inpainting is measured
with the cosine similarity of the predicted patches
compared to the ground truth. Table 3 shows the re-
sults at 3 different completion levels. Due to the ma-
terial prediction step, the inpainter only relies on one
type of material as the training area, leading to high
results across the board.
Table 3: The average texture inpainting similarity on the
ShapeNet Core v2 dataset, completed at 25, 50 and 75%
respectively.
ShapeNet Core V2 25% completion 50% completion 75% completion
Cosine Similarity 86.34% 90.00% 91.40%
The patched-based inpainting model inpaints the
textures as seen in Figure 11 with a patch size of 8 and
an overlap size of 2. To increase the rotational invari-
ance, we use rotations of [0,45,90,135,180] degrees.
Figure 11: The inpainting results. The first row shows the
predicted material indexes, the second row shows the UV
texture map, the third row the mapped incomplete original
texture and the final row the texture inpainting.
4.3.4 Full Completion
Figure 12 illustrates the completion results on the
Matterport dataset compared to the state of the art.
Objects with near-complete scans, such as the sofa
and stool, yield consistent geometry and texture com-
pletions. In contrast, less-scanned objects still pro-
duce plausible geometries but face challenges in tex-
ture inpainting. Extensive missing areas result in in-
sufficient reference patches, leading to repetitive tex-
tures.
5 DISCUSSION
The AutoSDF network demonstrates robust geometry
completion, effectively predicting large missing areas
even for meshes with limited ground truth. However,
it sacrifices fine details, and the VAE encoding alters
originally observed parts. Despite this, AutoSDF out-
performs the SOTA Multimodal Point-cloud Comple-
tion method (MPC) in preserving existing parts, as
shown in (Mittal et al., 2022).
Material segmentation with SAM excels at accu-
rately segmenting basic materials like wood, fabric,
and plastic, regardless of orientation. However, it
struggles with very small patches due to 2D resolu-
tion limits and is affected by lighting conditions, as
shadows and reflections are baked into the object dur-
ing capture, similar to (Siddiqui et al., 2022).
Material prediction enhances boundary definitions
between materials, improving representation. Chal-
lenges remain with extensive missing areas or ob-
jects featuring numerous distinct materials. Patch-
based image inpainting struggles with irregular pat-
terns, such as printed illustrations or intricate details,
underscoring the need for better handling of nonuni-
form textures. Unlike (Stets et al., 2019), which lim-
its segmentation to predefined material classes, our
method assigns generic material labels to patches, ab-
stracting actual materials and shifting the challenge to
2D inpainting.
Incorporating the material mask—a map indicat-
ing patches with the same material index—into the
completion process ensures cleaner reference areas
and facilitates effective inpainting for repeating tex-
tures. However, difficulties in inpainting orientation
and the reliance on UV layout pose challenges, po-
tentially limiting the method’s broader applicability.
6 CONCLUSION
This study presents a novel material prediction step in
the geometry and texture completion pipeline for par-
tially scanned 3D objects. The process begins with
geometry prediction to establish the structure, fol-
lowed by a three-step texture completion. First, the
partial UV map undergoes material segmentation us-
ing SAM to abstract the object for alignment with
training data. Next, the IF-Net network predicts the
material for missing areas. Finally, a 2D inpainting
refines the texture on the UV map for visual detail.
Our method delivers promising results, partic-
ularly with real scans, achieving clearer material
boundaries and advancing the state of the art. How-
ever, areas for improvement remain: enhancing UV
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
200
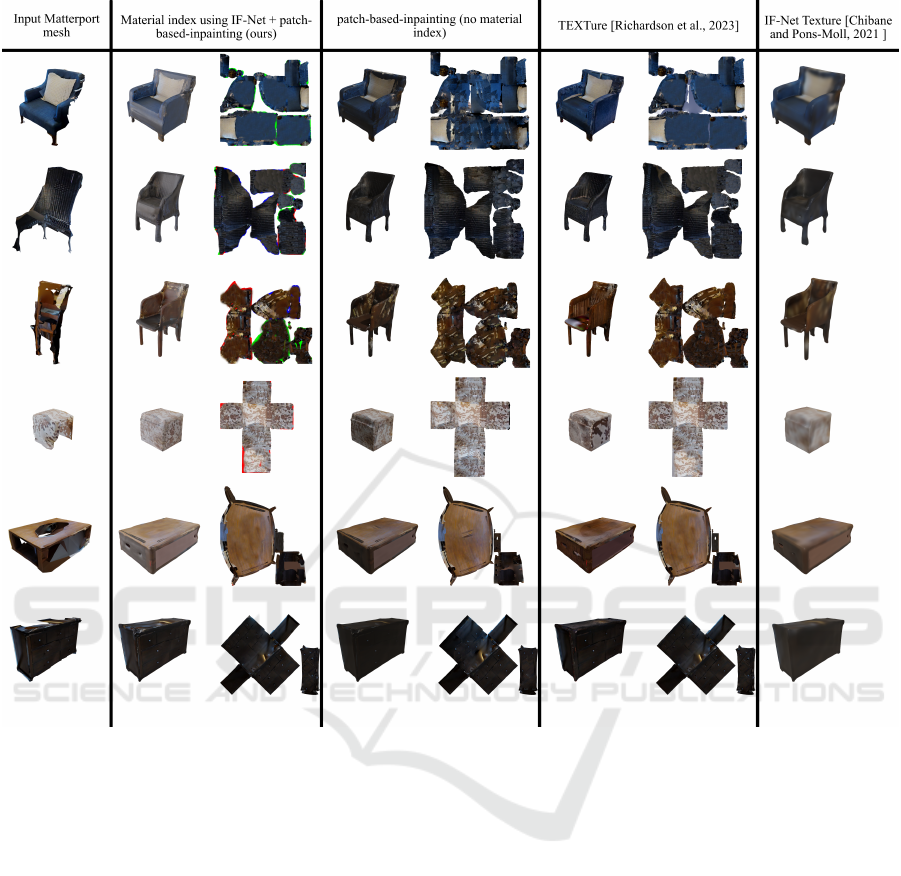
Figure 12: The texture inpainting results from the Matterport dataset using our method compared against: patch-based in-
painting, TEXTure, and IF-net Texture.
unwrapping could refine texture mapping, and better
occlusion detection would improve scene accuracy.
Future work may explore applying this approach to
full-scene reconstructions.
REFERENCES
Chang, A., Dai, A., Funkhouser, T., Halber, M., Niessner,
M., Savva, M., Song, S., Zeng, A., and Zhang, Y.
(2017). Matterport3d: Learning from rgb-d data in in-
door environments. International Conference on 3D
Vision (3DV).
Chang, A. X., Funkhouser, T., Guibas, L., Hanrahan, P.,
Huang, Q., Li, Z., Savarese, S., Savva, M., Song, S.,
Su, H., Xiao, J., Yi, L., and Yu, F. (2015). Shapenet:
An information-rich 3d model repository.
Chen, Z., Liu, L., Zhang, Z., and Wang, G. (2007). Sur-
face parameterization via aligning optimal local flat-
tening. In Proceedings - SPM 2007: ACM Symposium
on Solid and Physical Modeling, pages 291–296.
Cheng, A.-C., Li, X., Liu, S., and Wang, X. (2023). Tuvf:
Learning generalizable texture uv radiance fields.
Cheng, Y.-C., Lee, H.-Y., Tulyakov, S., Schwing, A., and
Gui, L. (2022). Sdfusion: Multimodal 3d shape com-
pletion, reconstruction, and generation.
Chibane, J., Alldieck, T., and Pons-Moll, G. (2020). Im-
plicit functions in feature space for 3d shape recon-
struction and completion.
Chibane, J. and Pons-Moll, G. (2020). Implicit feature net-
works for texture completion from partial 3d data.
Chu, R., Xie, E., Mo, S., Li, Z., Nießner, M., Fu, C.-W., and
Jia, J. (2023). Diffcomplete: Diffusion-based genera-
tive 3d shape completion.
Efros, A. A. and Freeman, W. T. (2001). Image quilting
for texture synthesis and transfer. In Proceedings of
the 28th Annual Conference on Computer Graphics
and Interactive Techniques, pages 341–346. Associa-
tion for Computing Machinery.
Flavell, L. (2010). Beginning Blender : open source 3D
modeling, animation, and game design. Apress.
Geometry and Texture Completion of Partially Scanned 3D Objects Through Material Segmentation
201

Gao, D., Rozenberszki, D., Leutenegger, S., and Dai, A.
(2023). Diffcad: Weakly-supervised probabilistic cad
model retrieval and alignment from an rgb image.
Gao, L., Wu, T., Yuan, Y.-J., Lin, M.-X., Lai, Y.-K., and
Zhang, H. (2020). Tm-net: Deep generative networks
for textured meshes.
Huang, J., Zhang, H., Yi, L., Funkhouser, T., Nießner, M.,
and Guibas, L. (2018). Texturenet: Consistent lo-
cal parametrizations for learning from high-resolution
signals on meshes.
Jacobson, A., Kavan, L., and Sorkine-Hornung, O. (2013).
Robust inside-outside segmentation using generalized
winding numbers.
Karadeniz, A. S., Ali, S. A., Kacem, A., Dupont, E., and
Aouada, D. (2022). Tscom-net: Coarse-to-fine 3d tex-
tured shape completion network.
Kirillov, A., Mintun, E., Ravi, N., Mao, H., Rolland, C.,
Gustafson, L., Xiao, T., Whitehead, S., Berg, A. C.,
Lo, W.-Y., Doll
´
ar, P., and Girshick, R. (2023). Seg-
ment anything.
Liang, Y., Wakaki, R., Nobuhara, S., and Nishino, K.
(2022). Multimodal material segmentation rgb near
infra-red angle of polarization degree of polarization
material segmentation annotation.
Lin, C.-H., Gao, J., Tang, L., Takikawa, T., Zeng, X.,
Huang, X., Kreis, K., Fidler, S., Liu, M.-Y., and Lin,
T.-Y. (2022). Magic3d: High-resolution text-to-3d
content creation.
Liu, M., Shi, R., Chen, L., Zhang, Z., Xu, C., Wei, X., Chen,
H., Zeng, C., Gu, J., and Su, H. (2023). One-2-3-
45++: Fast single image to 3d objects with consistent
multi-view generation and 3d diffusion.
Lorensen, W. E. and Cline, H. E. (1998). Marching cubes:
A high resolution 3d surface construction algorithm.
Lugmayr, A., Danelljan, M., Fisher, A. R., Radu, Y., Luc,
T., and Gool, V. (2022). Repaint: Inpainting using
denoising diffusion probabilistic models.
Maggiordomo, A., Cignoni, P., and Tarini, M. (2021). Tex-
ture defragmentation for photo-reconstructed 3d mod-
els. Computer Graphics Forum, 40:65–78.
Maggiordomo, A., Cignoni, P., and Tarini, M. (2023). Tex-
ture inpainting for photogrammetric models. Com-
puter Graphics Forum, 42.
Mittal, P., Cheng, Y.-C., Singh, M., and Tulsiani, S. (2022).
Autosdf: Shape priors for 3d completion, reconstruc-
tion and generation.
Oechsle, M., Mescheder, L., Niemeyer, M., Strauss, T., and
Geiger, A. (2019). Texture fields: Learning texture
representations in function space.
Rao, Y., Nie, Y., and Dai, A. (2022). Patchcomplete: Learn-
ing multi-resolution patch priors for 3d shape comple-
tion on unseen categories.
Richardson, E., Metzer, G., Alaluf, Y., Giryes, R., and
Cohen-Or, D. (2023). Texture: Text-guided texturing
of 3d shapes.
Sharma, P., Philip, J., Gharbi, M., Freeman, B., Durand,
F., and Deschaintre, V. (2023). Materialistic: Select-
ing similar materials in images. ACM Transactions on
Graphics, 42.
Siddiqui, Y., Thies, J., Ma, F., Shan, Q., Nießner, M., and
Dai, A. (2021). Retrievalfuse: Neural 3d scene recon-
struction with a database.
Siddiqui, Y., Thies, J., Ma, F., Shan, Q., Nießner, M., and
Dai, A. (2022). Texturify: Generating textures on 3d
shape surfaces.
Sipiran, I., Gregor, R., and Schreck, T. (2014). Approximate
symmetry detection in partial 3d meshes. Computer
Graphics Forum, 33:131–140.
Stets, J. D., Lyngby, R. A., Frisvad, J. R., and Dahl, A. B.
(2019). Material-based segmentation of objects. In
Lecture Notes in Computer Science (including sub-
series Lecture Notes in Artificial Intelligence and Lec-
ture Notes in Bioinformatics), volume 11482 LNCS,
pages 152–163. Springer Verlag.
Sun, C., Tong, X., and Liu, Y. (2022). Seman-
tic segmentation-assisted instance feature fusion for
multi-level 3d part instance segmentation. Computa-
tional Visual Media.
Tan, M. and Le, Q. V. (2019). Efficientnet: Rethinking
model scaling for convolutional neural networks.
Vermandere, J., Bassier, M., and Vergauwen, M. (2022).
Two-step alignment of mixed reality devices to exist-
ing building data. Remote Sensing, 14.
Vermandere, J., Bassier, M., and Vergauwen, M. (2023).
Texture-based separation to refine building meshes.
ISPRS Annals of the Photogrammetry, Remote Sens-
ing and Spatial Information Sciences, X-1/W1-
2023:479–485.
Vermandere, J., Bassier, M., and Vergauwen, M. (2024).
Semantic uv mapping to improve texture inpainting
for indoor scenes.
Wang, P.-S., Liu, Y., and Tong, X. (2022). Dual octree graph
networks for learning adaptive volumetric shape rep-
resentations. ACM Transactions on Graphics (SIG-
GRAPH), 41.
Yu, X., Dai, P., Li, W., Ma, L., Liu, Z., and Qi, X. (2023).
Texture generation on 3d meshes with point-uv diffu-
sion.
Zhou, L., Du, Y., and Wu, J. (2021). 3d shape generation
and completion through point-voxel diffusion.
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
202
