
Finding the Shear Reflection Symmetry Plane in a 3D Point Cloud
V
´
ıtek Po
´
or
1 a
, Ivana Kolingerov
´
a
1 b
and Damjan Strnad
2 c
1
Department of Computer Science and Engineering, University of West Bohemia,
Technick
´
a 8, 306 14 Plze
ˇ
n, Czech Republic
2
Department of Computer Science, Faculty of Electrical Engineering and Computer Science, University of Maribor,
Koro
ˇ
ska cesta 46, 2000 Maribor, Slovenia
Keywords:
Symmetry, Reflection, Shearing, Computer Graphics.
Abstract:
Many objects, namely man-made ones, show signs of various types of symmetry. The most common type
perceived by humans is reflection symmetry to some plane. When detecting the symmetry for geometric
models, the existing algorithms look for orthogonal reflection symmetry. However, the models can be sheared,
therefore, algorithms detecting shear reflection symmetry would be useful. In this paper, we propose an
algorithm for detecting the plane of shear reflection symmetry in a 3D point cloud on condition that the shear
was done in one of the coordinate axes.
1 INTRODUCTION
Symmetry is a distinctive visual feature of geometric
objects, enabling their faster human understanding.
Mathematically, it is typically defined as a geomet-
ric transformation different from the identity, map-
ping the object into itself. The most often used trans-
formation is planar reflection, mirroring the object
by a plane of symmetry, and many methods for its
computer detection have been developed. However,
the used reflection is orthogonal, although managing
more general directions of reflection could be useful
to handle objects that are symmetric in a more general
sense, e.g., an object and its skewed copy.
When detecting the plane of symmetry for com-
puter geometric models, we work with approximate
symmetry, since we cannot rely on perfect symmetry
in real 3D data. Therefore, it is reasonable to propose
symmetry detection algorithms that work with noisy
or incomplete data.
This paper makes the first step to handling one
variant of non-orthogonal reflection symmetry, a
shear reflection symmetry. The proposed algorithm
handles 3D point clouds, possibly noisy or incom-
plete, sampled from the surface of a geometric object.
The input data are supposed to have been sheared in
the x-direction, by an unknown angle. The output is
a
https://orcid.org/0009-0004-4489-2837
b
https://orcid.org/0000-0003-4556-2771
c
https://orcid.org/0000-0003-4468-0290
the best fitting plane of shear reflection symmetry and
the shear angle to the x-axis.
1.1 Background
The perfect symmetry of the given 3D points of an ob-
ject X can be understood as a geometric transforma-
tion T such that T (X) = X, i.e., the object X is invari-
ant to the transformation T . The approximate sym-
metry can then be understood as a geometric transfor-
mation T such that T (X) approximately matches X.
A common type of symmetry is reflection symme-
try, where the transformation T is a reflection over a
given plane. Let the plane be described by the signed
distance from the origin d and the normal vector n.
Then the orthogonal reflection of the point p onto its
image r through the plane (n, d) is given by
r = p − 2 ∗ (dot(n, p)− d) ∗ n, (1)
where dot is the scalar product of two vectors.
Naturally or artificially skewed data can be de-
scribed by an affine transformation that shifts each
point in a certain direction by the value of its distance
from a given line parallel to that direction. This trans-
formation is often called shear mapping, shear trans-
formation or just shearing. The equation of the gen-
eral affine transformation, mapping the source vector
x = [x, y, z]
T
by the transformation matrix A into the
destination vector x
′
= [x
′
, y
′
, z
′
]
T
, is as follows:
x
′
= Ax. (2)
Poór, V., Kolingerová, I. and Strnad, D.
Finding the Shear Reflection Symmetry Plane in a 3D Point Cloud.
DOI: 10.5220/0013120400003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 1: GRAPP, HUCAPP
and IVAPP, pages 203-210
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
203

In 3D space, shearing can be done in three di-
rections. The corresponding transformation matrices
have the following forms:
shearing in x−direction : A =
1 0 0
a 1 0
b 0 1
, (3)
shearing in y−direction : A =
1 a 0
0 1 0
0 b 1
, (4)
shearing in z −direction : A =
1 0 a
0 1 b
0 0 1
, (5)
where a and b are coefficients of the shear; shearing in
the x-direction affects all axes except the x-axis, etc.
It is possible to assemble shearing in more axes, how-
ever, in this work, only the shear matrix (4) is used
and, what is more, b = 0.
The coefficients are derived from the angle at
which the object is sheared. We call this angle the
shear angle and the coefficients are its tangent. For ex-
ample, if the object is to be sheared in the y-direction
at an angle of 45° only due to the influence of the
x-axis, then the matrix (4) with the coefficients a =
tan(45) and b = 0.
1.2 Related Work
Symmetry detection is widely studied in various fields
including compression (Simari et al., 2006), object re-
construction (Sipiran, 2017) and alignment (Chaouch
and Verroust-Blondet, 2009), re-meshing (Podolak
et al., 2007), symmetrical editing (Martinet et al.,
2006), facial image analysis (Mitra and Liu, 2004).
Due to the importance of this topic, various types of
symmetry were addressed, such as perfect, approxi-
mate, global, local, extrinsic, intrinsic, rotational, and
reflection; the detection methods operate namely on
images and 3D points. An overview is provided in
(Mitra et al., 2013).
As reflection symmetry is the most important,
there are many methods for its detection. Most of
them have some limitations; e.g., they detect only
planes passing through a reference point (for exam-
ple, the object centroid) (Sun and Sherrah, 1997; Mar-
tinet et al., 2006; Li et al., 2016). These methods are
suitable for determining the global symmetry of the
entire object but not its local symmetry where dif-
ferent reference points are needed. The method in
(Schiebener et al., 2016) does not have this limita-
tion and is thus suitable also for local symmetry but
additional knowledge is needed, such as the position
from which the object is scanned. A similar method
is (Ji and Liu, 2019), which needs an additional neu-
ral network training dataset. There are a few methods
that impose no limitations on the input data, such as
in (Hruda et al., 2022).
Shear is indirectly used in the search for symme-
try in images, as the projective transformation dis-
torts the objects in the scene and they appear skewed.
Several algorithms have been presented to solve this
problem, e.g., (Gross and Boult, 1994; Bruckstein and
Shaked, 1998; Friedberg, 1986; Cham and Cipolla,
1995). These algorithms are based on the extraction
of features from the shape and either take into account
the entire contour and are insensitive to noise, or con-
sider locally defined characteristic features; it brings
instability and sensitivity to noise.
As far as we know, there is no direct method for
shear symmetry in a 3D point cloud. However, meth-
ods for object registration can be applied - we can
see symmetry detection as a special case of registra-
tion where both input objects are the same. Among
the registration algorithms, there are also specific al-
gorithms for affine transformations (Ji et al., 2017;
Shu et al., 2021). However, these algorithms need
a proper adjustment so that their output is a detected
plane of symmetry and they are unnecessarily com-
plex for solving the symmetry detection problem.
Our work focuses on global, approximate, shear
reflection symmetry in a 3D point cloud, sampled
from the surface of the object. For easier understand-
ing, the algorithm is first described in a simplified ver-
sion, for a fixed shear angle, in Section 2. An ex-
tension of the algorithm for an arbitrary shear angle
is presented in Section 3. The limitation of the al-
gorithm is that only shear along the x-axis is taken
into account. The case of an unknown shear direction
could be solved by triple repetition of the algorithm.
However, a general shear in a more complicated direc-
tion, combined from transformations in more axes, is
out of scope of the algorithm. Such shears are compli-
cated even to be perceived correctly and they are am-
biguous in the sense that the results could have been
achieved by more than one series of transformations.
2 THE SIMPLIFIED
ALGORITHM FOR A FIXED
SHEAR ANGLE
The input of the algorithm is a set of 3D points from
the surface of an object, the output is the equation of
the plane of shear symmetry together with the shear
angle. A plane (n, d) is described by its normal n
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
204

and its distance d from the origin. The shear angle
tells us the angle of transformation of the shear object
in a certain direction (compared to the untransformed
object). The version of the algorithm presented in this
section works with a fixed direction and angle (i.e.,
the fixed shear angle is the same as the shear angle
at the output). The shear reflection symmetry plane
detection algorithm is composed of three main steps:
1. Generating orthogonal and shear planes,
2. Evaluation of all planes,
3. Selection of the best plane.
A detailed description of the algorithm steps is be-
yond the scope of this text.
2.1 Generating Planes
Planes are generated directly from the input point
cloud. All pairs of points are processed, and each
pair generates two planes. Let the points p and q
be the currently processed pair of points. The first
plane reflects orthogonally the point p to the point q
(see Equation 1). We need this plane for cases where
the detected reflection symmetry plane is not sheared.
The second plane, called the shear plane, reflects at a
shear angle. In addition, the input of the algorithm
contains the shear vector shear, the first two com-
ponents of which indicate the shear direction and the
third component the shear angle.
Shear reflection through the original plane is
achieved by constructing an auxiliary plane whose
normal vector ns is in the direction of the input vector
shear and its distance from the origin is determined
by the distance of the intersection x of the original
plane with the line constructed by the input point p
and the ns direction (see Fig. 1). The term original
plane refers to the plane currently being processed by
the algorithm.
Figure 1: An example of constructing an auxiliary plane to
achieve shear reflection.
2.2 Evaluation of all Planes
The next step of the algorithm is the evaluation of the
generated planes. For each plane, the evaluation is
based on the distances of the mirrored points from the
original points. First, a plane is constructed from the
auxiliary vector, and then a measure is evaluated for
it. This evaluation process is performed for all points
of the input set over all generated planes. The overall
evaluation of one plane is given by the sum of partial
evaluations.
Finally, the partial evaluation of the given plane
for one given point from the input set of points is cal-
culated. Through the shear plane constructed as de-
scribed in the previous text, the point p is reflected
to the point r orthogonally via Equation 1. From the
thus reflected point r, the distances of all points of the
input set are calculated. The partial evaluation of the
input plane for the input point p is calculated by the
function minimum which returns the minimum value
from the distances of all points to point p.
2.3 Selection of the Best Plane
The selection of the plane with the best evaluation is
done by the ascending rating of the resulting evalua-
tions associated with the planes. The plane with the
lowest rating is taken as the best. In other words, the
mirror of points obtained by shear reflection through
the given plane has the smallest distance of points
from the original points.
However, the algorithm can return more planes
since it has the entire list of evaluated planes at its
disposal. More planes than one may be desirable for
objects where the plane of symmetry is not clearly
visible to humans. Such a selection is then made by
the user, who must take into account the value of the
evaluation.
2.4 Optimization
The proposed algorithm has been so far explained as
brute force. To achieve a reasonable runtime, various
optimization techniques can and should be incorpo-
rated. One of the techniques with the biggest impact
is input data reduction. A 3D spatial grid with a fixed
cell size is built over the input data points. All points
in individual cells are then averaged. The points cre-
ated in this way are then used in the next steps of the
algorithm. The number of points is directly propor-
tional to the number of grid cells. The input points
are normalized to a cube of unit edge and shifted so
that the centroid of the object is at the origin of the
world coordinate system.
Finding the Shear Reflection Symmetry Plane in a 3D Point Cloud
205
The biggest bottleneck of the algorithm is the eval-
uation of the planes. Optimization is done both to
reduce the set of planes to be evaluated and for the
evaluation itself. One can imagine that the gener-
ated planes in the first step are many, especially for
large data sets. As part of this step, the conditions for
adding a new plane to an existing data structure are
established. The distance of the plane from the origin
and the deviation of the direction of the normal from
the fixed directions are verified. Assuming that the
resulting plane passes through the origin (or its small
neighborhood), we keep only planes with the distance
from the origin smaller than the chosen threshold e
d
.
Similarly, we can also limit the normal direction of
the plane, with a known shear it is likely that the re-
sulting plane will be somewhere within the angle e
a
from the direction of shear or the orientation of world
coordinates.
Another significant optimization is performed in
the evaluation of planes. The experiments show that a
lot of time is devoted to the evaluation of planes that
end up with a worse measure than the best planes.
Since the resulting measure of one plane is given as
the sum of partial measures of all points, it is possi-
ble to terminate the evaluation process of the current
plane on the base of additional knowledge, such as the
best evaluation received so far.
3 THE FULL ALGORITHM FOR
AN ARBITRARY SHEAR
ANGLE
The algorithm described so far worked with addi-
tional knowledge of the shear angle (obtained at the
input of the algorithm). This section describes a gen-
eralization of the algorithm by removing the limita-
tion of a previously known shear angle. Thus, the
required input of the algorithm is only a set of 3D
points. The current limitation of the algorithm to the
x-axis remains.
3.1 The Proposed Extension
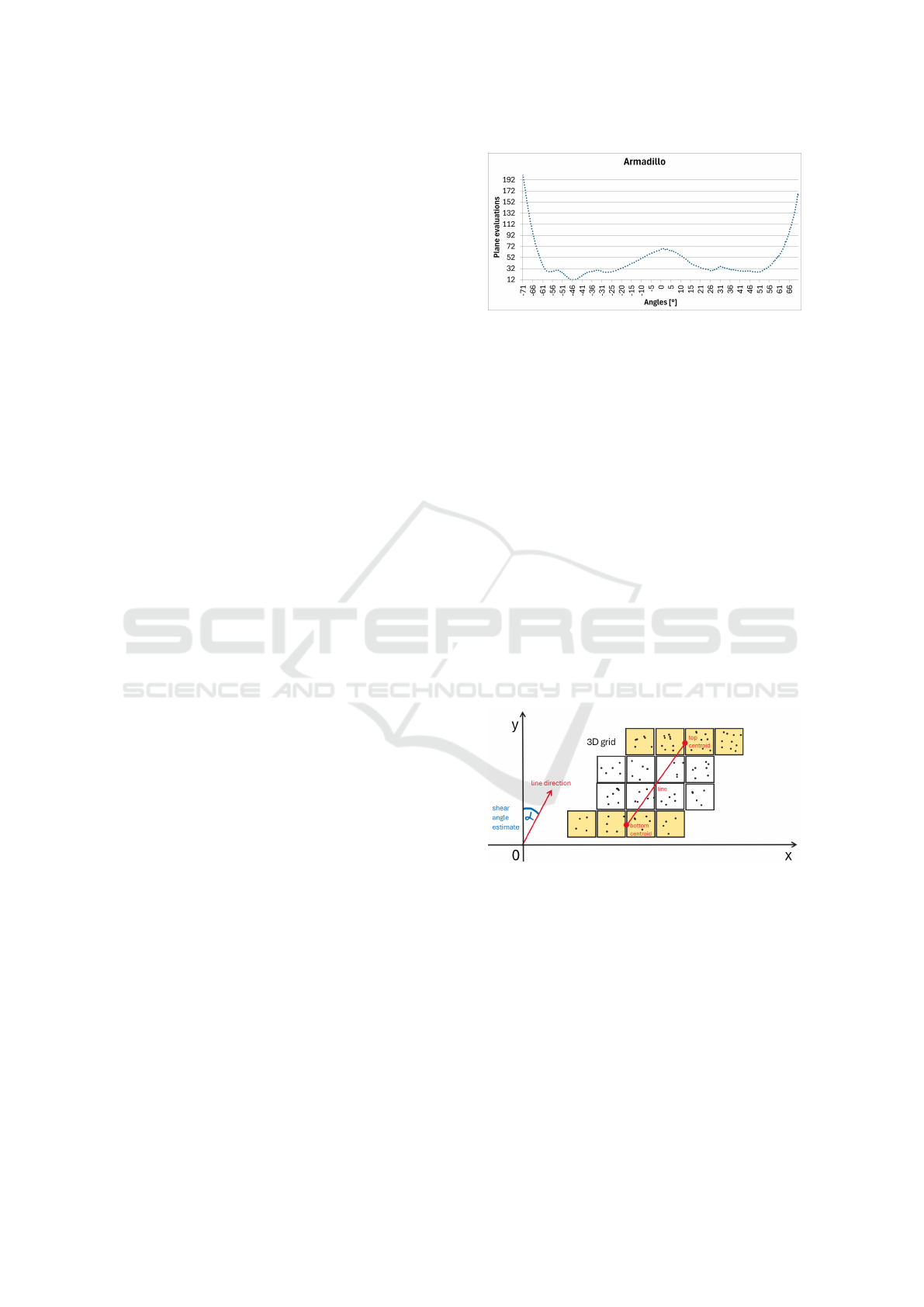
The problem of finding an unknown shear angle in
one axis corresponds to the problem of finding an
extreme in the graph of plane evaluations as a func-
tion of shear angle, see an example in Figure 2. For
time reasons, we want to avoid the computation of
this graph and still find the extreme. In order to avoid
computation in the entire interval of angles, an initial
estimate of the shear angle is needed.
Figure 2: Planes evaluation for various shear angles over the
Armadillo object. Microsoft Excel was used as the graph
generator.
3.2 Shear Angle Estimation
One can imagine the estimate of the shear angle as the
angle between the y-axis and a straight line dividing
the object vertically in two when projected onto the
xy-plane. The straightforward approach is the use of a
pre-created 3D grid. In particular, it concerns the base
and ceiling cells. From these two sets of cells, two
points are determined as the centroids of the points
contained in these sets. These two points construct
a straight line that passes through the object. When
projecting such a straight line into 2D (xy-plane in our
case), the angle between the straight line and the y-
axis indicates the skew of the grid. This angle is also
the desired estimate. A schematic is shown in Figure
3, with an example on a real data set shown in Figure
4. The estimate is then used to construct an initial
interval for finding the resulting shear angle.
Figure 3: Sketch of the shear angle estimation construction
process based on the bottom and top points of the 3D grid
cells. For simplicity, projection to the xy-plane is used.
3.3 Finding Shear Angle in Interval
With a known estimate of the shear angle, the search
of the optimum can be limited to only a small sub-
interval of angles. First, a total of five values are de-
termined, from which the search sub-interval is then
constructed. The five values are a set formed around
the estimate. For the estimate α
e
and for the neigh-
borhood coefficient b, the set is composed as
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
206

Figure 4: Shear angle estimate on the Lion data with the an-
gle estimate (red line) and the plane found by the algorithm
(black line). For simplicity, only the bottom and top cells
of the 3D grid are shown, which are used to calculate the
centroids and construct the line.
{−(2∗b)+α
e
, −b+α
e
, α
e
, α
e
+b, α
e
+(b∗2)}. (6)
Subsequently, a measure is calculated for these
five values using our detection algorithm. A search
sub-interval is constructed from the two values with
the best measure. This process is repeated for −α
e
.
At the end, a total of two search sub-intervals are
available, one for a positive estimate and one for a
negative estimate. A binary search is used over these
two intervals. The two best obtained values are com-
pared and the best value is declared as the resulting
shear angle.
4 EXPERIMENTS AND RESULTS
First, in Section 4.1, the basic experiments and results
for the simplified proposed method with a fixed shear
angle are presented. These experiments focus on the
correctness of the resulting plane and the calculation
time. Further in Section 4.2 there are experiments and
results for the extended method of finding the shear
angle. Here, the main subject is comparing the results
of the extended method against the best possible ones
obtained from previous experiments.
4.1 Experiments and Results for
Simplified Method
Figure 5 shows objects with their sheared symmetry
planes detected by the proposed method. Objects are
displayed so that the detected plane (indicated by a
line) is perpendicular to the plane of projection. They
were taken from various datasets (Fang et al., 2008;
Levoy et al., 2005; Shilane et al., 2004). The re-
sults except for Bunny look correct in visual inspec-
tion. More detailed analysis is beyond the scope of
this text.
Since we do not know of another method for shear
symmetry detection, we cannot perform a comparison
and instead compare the best detected shear symme-
try plane with the best detected reflection symmetry
plane that is obtained for un-sheared data. We mainly
experimented with the plane evaluation measurement
across different angles and the algorithm run time.
As a reference method for the detection of orthog-
onal symmetry, we have chosen (Hruda et al., 2020).
This method does not require additional information
for input data. As an experiment, we took the out-
put of the reference method for an object that was not
sheared. Then we sheared the result plane accord-
ing to the best angle obtained by our algorithm. We
obtained the best shear angle by re-running our algo-
rithm for angles ranging from −90 to 90 degrees with
the step equal to 0.1 and selecting the best result. The
comparison is based on the angle difference between
our detected plane and the plane additionally sheared
according to our obtained shear angle. Table 1 shows
the results for all objects. The biggest difference can
be seen with the Bunny object. This is mainly due to
the selection of the best angle.
If we detect a shear symmetry plane in the data,
where we know the shear angle, then we can assume
that the detected plane will be sheared at an angle op-
posite to the angle of the sheared data. We performed
an experiment that detects a shear plane with different
fixed shear angles for one specific object, Armadillo
(see Figure 5 (b)), sheared in the x-axis at an angle
of 45 degrees. Figure 2 shows the results of individ-
ual measurement values for different angles (a smaller
value is better). One can see that the best evaluation
is around an angle of −45 degrees, which was the as-
sumption of the experiment.
Computation time for the tested objects can be
seen in Table 2. Different sizes of simplification de-
pending on the total number of points are determined
by the chosen simplification algorithm and the shape
of the object.
4.2 Experiments and Results for
Proposed Method
Table 3 compares the best obtained shear angle (as
in Table 1) with the shear angle found using the ex-
tended algorithm. Data is generated for every single
instance of the Armadillo object (see Figure 5 (b)) that
has been sheared over the interval (-60, 60). Only a
few representative samples were selected.
Table 4 summarizes the error rate statistics of the
proposed algorithm extension compared to the best
found values. This experiment extends the previous
Table 3 by all previously used objects.
Finding the Shear Reflection Symmetry Plane in a 3D Point Cloud
207
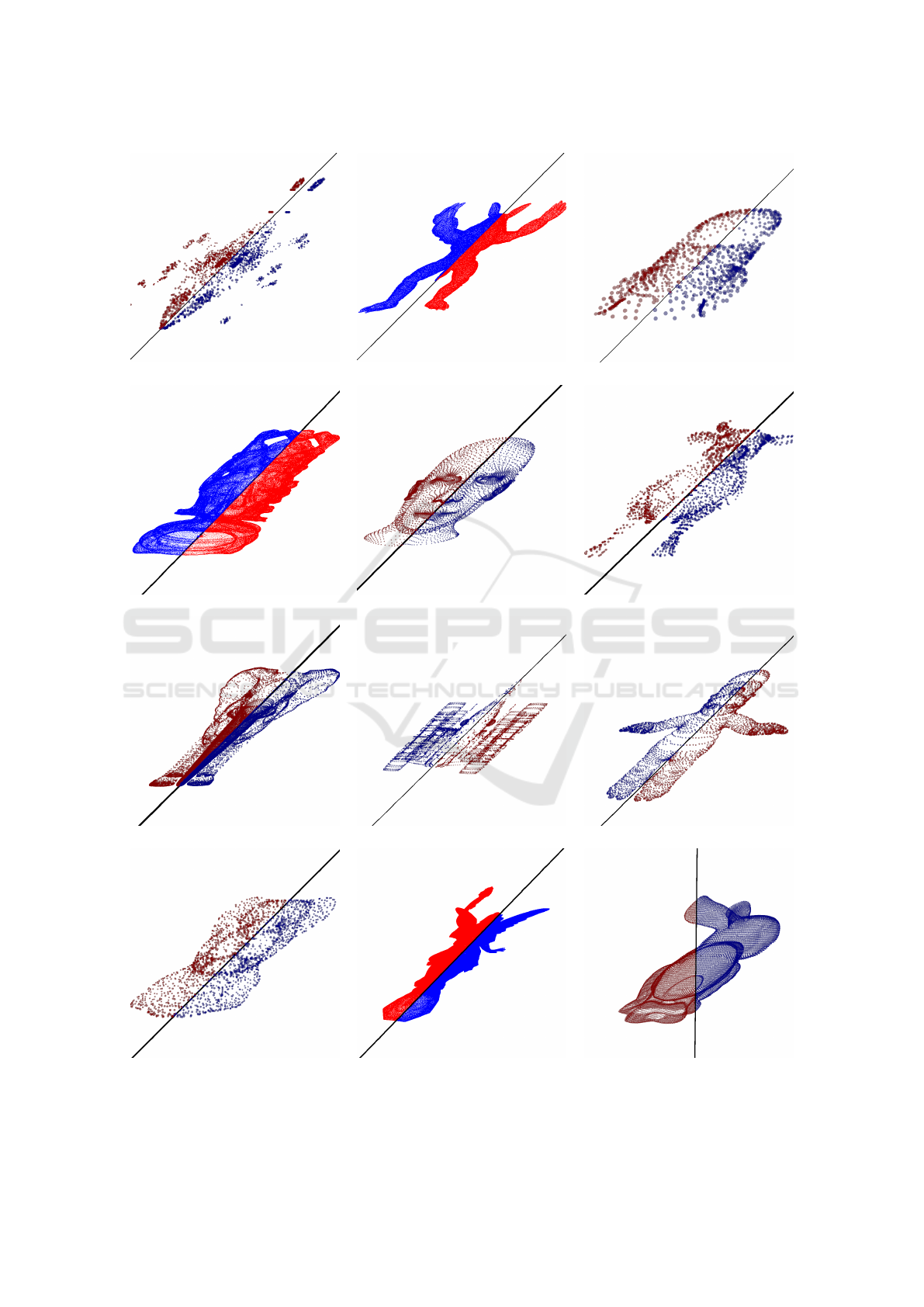
(a) Ant - 3495 (b) Armadillo - 172 974 (c) Beetle - 988
(d) Buddha - 543 103 Mannequin - 6737 (e) Cow - 2903 (f)
(g) Elephant - 19 753 (h) Formula - 10 969 (i) Homer - 5103
(j) Lion - 2213 (k) Lucy - 750 001 (i) Bunny - 34 834
Figure 5: Several objects with their symmetry planes detected using the proposed method. The number indicates the number
of 3D points in the point cloud.
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
208
Table 1: Comparison of angle differences between the plane normals of the reference method and the proposed method. The
reference plane is sheared according to the best angle we obtained. Then both shear planes are compared. The distance from
the origin d is not shown as the compared planes pass through the centroid of the object.
Object
Reference Shear Reference Resulting Angle
plane Angle [°] Shear Plane Plane Diff. [°]
Ant (1.00, 0.00, 0.01) 44.9 (0.71, -0.70, 0.00) (-0.71, 0.71, -0.01) 0.60
Armadillo (1.00, 0.00, 0.01) 45.5 (0.70, -0.71, 0.00) (0.70, -0.71, 0.00) 0.21
Beetle (1.00, 0.00, 0.01) 45.1 (0.71, -0.70, 0.00) (0.71, -0.71, 0.00) 0.19
Buddha (-1.00, 0.00, 0.00) 44.5 (-0.71, 0.70, 0.00) (0.71, -0.70, 0.00) 0.18
Bunny (-0.99, 0.01, 0.17) 29.6 (-0.84, 0.49, 0.23) (1.00, -0.01, -0.01) 32.26
Cow (-1.00, 0.01, 0.01) 45 (-0.70, 0.71, 0.01) (-0.70, 0.72, 0.01) 0.31
Elephant (1.00, 0.00, -0.01) 45.1 (0.71, -0.71, 0.00) (-0.71, 0.71, 0.01) 0.58
Formula (1.00, -0.01, 0.00) 44.4 (0.71, -0.70, 0.00) (0.71, -0.71, 0.00) 0.17
Homer (-1.00, -0.01, -0.02) 45 (-0.71, 0.70, -0.02) (0.71, -0.70, 0.00) 1.32
Lion (1.00, -0.01, 0.00) 44.9 (0.70, -0.71, 0.00) (-0.71, 0.71, -0.01) 0.63
Lucy (-1.00, -0.04, 0.03) 45.5 (-0.73, 0.69, 0.04) (-0.72, 0.69, 0.01) 1.91
Mannequin (-1.00, 0.00, 0.00) 44.9 (-0.71, 0.71, 0.00) (-0.71, 0.71, 0.00) 0.28
Table 2: Computation time for one fixed shear angle over
all objects. Times are measured for simplified objects.
Object Points
Points
(simpl.)
Time
[ms]
Ant 3495 162 508
Armadillo 172 974 281 1376
Beetle 988 283 1569
Buddha 543 103 361 2661
Bunny 34 834 342 2253
Cow 2903 253 1217
Elephant 19 753 272 1260
Formula 10 969 372 2981
Homer 5103 335 2389
Lion 2213 305 1797
Lucy 750 001 247 1301
Man-
nequin
6737 315 2012
5 CONCLUSION AND FUTURE
WORK
We proposed a new method for the detection of shear
reflection symmetry planes. We verified the method
on a set of objects. Currently, the method works with
shearing in one direction of the x-axis. Another limi-
tation is the chosen level of simplification of the input
point cloud, which has a direct impact on the result
and calculation. Future work will focus on removing
the limitation to include an adaptive choice of point
cloud simplification level such that the smallest pos-
sible data still gives correct results. At the same time,
another interesting challenge for future work is the
limitation of the fixed shearing axis direction.
Table 3: Comparison between the best obtained shear angle
and the found shear angle for the Armadillo object. The
individual data angles represent the partial shear instances
of the Armadillo object.
Data
Angle
Shear
Angle
[°]
Found
Shear
Angle
[°]
Angle
Diff. [°]
-59 58.0 58.5 00.5
-50 49.0 46.9 02.1
-40 40.0 38.6 01.4
-30 29.0 29.4 00.4
-20 19.0 19.3 00.3
-10 09.0 09.3 00.3
0 00.0 -00.4 00.4
10 -11.0 -11.2 00.2
20 -21.0 -21.0 00.0
30 -31.0 -30.5 00.5
40 -41.0 -40.4 00.6
50 -51.0 -51.1 00.1
59 -60.0 -59.6 00.4
ACKNOWLEDGEMENTS
This research was supported by the Czech Science
Foundation under research project 21-08009K, the
Slovene Research and Innovation Agency under re-
search project N2-0181, Research Programme P2-
0041; V. Po
´
or was also supported by the Ministry of
Education, Youth and Sports under the Students Re-
search project SGS-2022-015.
Finding the Shear Reflection Symmetry Plane in a 3D Point Cloud
209

Table 4: Summary statistic error rate over all instances of the used models over the interval (-60, 60). The acquisition error
rate is based on the experiment in Table 3, i.e. the difference between the best obtained angle and the found angle over the
shear data interval.
Object Min. Diff. [°] Max. Diff. [°] Avg. Diff. [°] Med. Diff. [°]
Ant 0.00 1.00 0.25 0.00
Armadillo 0.00 3.40 0.54 0.40
Beetle 0.00 1.40 0.45 0.30
Buddha 0.00 6.10 0.99 0.50
Bunny 0.00 4.60 0.79 0.50
Cow 0.00 3.50 0.43 0.40
Elephant 0.00 1.00 0.25 0.10
Formula 0.00 2.40 0.53 0.40
Homer 0.00 2.00 0.32 0.20
Lion 0.00 1.80 0.50 0.40
Lucy 0.00 3.50 0.60 0.50
Mannequin 0.00 1.50 0.40 0.40
REFERENCES
Bruckstein, A. M. and Shaked, D. (1998). Skew-symmetry
detection via invariant signatures. Pattern Recogni-
tion, 31(2):181–192.
Cham, T.-J. and Cipolla, R. (1995). Symmetry detection
through local skewed symmetries. Image and Vision
Computing, 13(5):439–450.
Chaouch, M. and Verroust-Blondet, A. (2009). Alignment
of 3d models. Graphical Models, 71(2):63–76.
Fang, R., Godil, A., Li, X., and Wagan, A. (2008). A new
shape benchmark for 3d object retrieval. In Interna-
tional Symposium on Visual Computing, pages 381–
392. Springer.
Friedberg, S. A. (1986). Finding axes of skewed symme-
try. Comput. Vision Graphics Image Process., 34:138–
155.
Gross, A. D. and Boult, T. E. (1994). Analyzing skewed
symmetries. Int. J. Comput. Vision, 13:91–111.
Hruda, L., Kolingerov
´
a, I., and V
´
a
ˇ
sa, L. (2020). Robust, fast
and flexible symmetry plane detection based on differ-
entiable symmetry measure: Supplementary material.
Available at http://meshcompression.org/tvcj-2020.
Hruda, L., Kolingerov
´
a, I., and V
´
a
ˇ
sa, L. (2022). Robust, fast
and flexible symmetry plane detection based on differ-
entiable symmetry measure. Visual Comput., 38:555–
571.
Ji, P. and Liu, X. (2019). A fast and efficient 3d reflection
symmetry detector based on neural networks. Multi-
media Tools and Applications, 78(24):35471–35492.
Ji, S., Ren, Y., Ji, Z., Liu, X., and Hong, X. (2017). An im-
proved method for registration of point cloud. Optik,
140:451–458.
Levoy, M., Gerth, J., Curless, B., and Pull, K. (2005).
The stanford 3d scanning repository. Available at
http://www.graphics.stanford.edu/data/3Dscanrep/.
Li, B., Johan, H., Ye, Y., and Lu, Y. (2016). Efficient 3d re-
flection symmetry detection: A view-based approach.
Graphical Models, 83:2–14.
Martinet, A., Soler, C., Holzschuch, N., and Sillion,
F. X. (2006). Accurate detection of symmetries in
3d shapes. ACM Transactions on Graphics (TOG),
25(2):439–464.
Mitra, N. J., Pauly, M., Wand, M., and Ceylan, D. (2013).
Symmetry in 3d geometry: Extraction and applica-
tions. Computer Graphics Forum, 32(6):1–23.
Mitra, S. and Liu, Y. (2004). Local facial asymmetry for
expression classification. In CVPR.
Podolak, J., Golovinskiy, A., and Rusinkiewicz, S. (2007).
Symmetry-enhanced remeshing of surfaces. In Pro-
ceedings of the Fifth Eurographics Symposium on Ge-
ometry Processing (SGP ’07), pages 235–242. Euro-
graphics Association.
Schiebener, D., Schmidt, A., Vahrenkamp, N., and As-
four, T. (2016). Heuristic 3d object shape completion
based on symmetry and scene context. In Intelligent
Robots and Systems (IROS), 2016 IEEE/RSJ Interna-
tional Conference on, pages 74–81. IEEE.
Shilane, P., Min, P., Kazhdan, M., and Funkhouser, T.
(2004). The princeton shape benchmark. In Shape
Modeling Applications, 2004. Proceedings, pages
167–178. IEEE.
Shu, Q., He, X., Wang, C., Yang, Y., and Cui, Z. (2021).
Fast point cloud registration in multidirectional affine
transformation. Optik, 229:165884.
Simari, P., Kalogerakis, E., and Singh, K. (2006). Fold-
ing meshes: Hierarchical mesh segmentation based on
planar symmetry. In Symposium on Geometry Pro-
cessing, volume 256, pages 111–119.
Sipiran, I. (2017). Analysis of partial axial symmetry on 3d
surfaces and its application in the restoration of cul-
tural heritage objects. In Proceedings of the IEEE
International Conference on Computer Vision Work-
shops, pages 2925–2933.
Sun, C. and Sherrah, J. (1997). 3d symmetry detection
using the extended gaussian image. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
19(2):164–168.
GRAPP 2025 - 20th International Conference on Computer Graphics Theory and Applications
210
