
BevGAN: Generative Fisheye Cross-View Transformers
Rania Benaissa, Antonyo Musabini, Rachid Benmokhtar, Manikandan Bakthavatchalam
and Xavier Perrotton
Valeo, Brain Division, anSWer AI R&D Center, Cr
´
eteil 94000, France
Keywords:
Generative Models, Image Generation, Image-to-Image Translation, Driving Assistance Systems,
Autonomous Vehicles.
Abstract:
Current parking assistance and monitoring systems synthesize Bird Eye View (BEV) images to improve drivers
visibility. These BEV images are created using a popular perspective transform called Inverse Perspective
Mapping (IPM), which projects pixels of surround-view images captured by onboard fisheye cameras onto a
flat plane. However, IPM faces challenges in accurately representing objects with varying heights and seam-
lessly stitching together the projected surround-views due to its reliance on rigid geometric transformations.
To address these limitations, we present BevGAN, a novel geometry-guided Conditional Generative Adver-
sarial Networks (cGANs) model that combines multi-scale discriminators along with a transformers-based
generator that leverages fisheye cameras calibration and attention-mechanisms to implicitly model geomet-
rical transformations between the views. Experimental results demonstrate that BevGAN outperforms IPM
and state-of-the-art cross-view image generation methods in terms of image fidelity and quality. Compared to
IPM, we report an improvement of +6.2db on PSNR and +170% on MS-SSIM when evaluated on a synthetic
dataset depicting both parking and driving scenarios. Furthermore, the generalization ability of BevGAN on
real-world fisheye images is also demonstrated through zero-shot inference.
1 INTRODUCTION
Automotive Surround-view Systems (SVS) assist ve-
hicles in navigating through unpredictable real-world
scenarios, reducing risks of accidents by making real-
time, high-confidence decisions.
SVS involves four wide-angle fisheye lens cam-
eras known as the surround-view cameras (SVCs),
which are already mounted in vehicles and offer a
large field of view (up to 195°). Numerous manu-
facturers like BMW, Mercedes, Toyota and Hyundai,
integrate such systems into their around-view moni-
tors (TrueCar, nd). The market size of these systems
was estimated around USD 2734.6 million in 2022
with an expected increase to USD 43815.1 million by
2031 (Business Research Insights, nd).
Despite that, images captured by fisheye cameras
exhibit strong radial distortions that are particularly
intensified with larger fields of view. It falls short in
providing an accurate and comprehensive understand-
ing of the distant environment since mapping real-
world coordinates onto perspective views alters the
objects appearance leading to hindered views and oc-
clusions between objects (see Figure 1). Moreover,
the scarcity of open datasets featuring fisheye images
often deters their use in tasks beyond around view
montiors, such as perception systems.
Conversely, Bird Eye View (BEV) perception has
proven to tremendously enhance the vehicles percep-
tual capabilities by using a configuration of six pin-
hole cameras mounted around the vehicle. BEV per-
ception provides rich semantic information, including
precise objects scaling and positioning, resulting in
accurate scene representations. This is particularly
pertinent in the context of parking assistance systems
where BEV images are showcased to assist the driver,
demanding high fidelity and an accurate representa-
tion of the real scene.
Direct acquisition of BEV images is challeng-
ing due to the need for costly equipment (such as
drones or helicopters) to properly setup acquisition
sensors. Alternatively, current parking assistance
systems utilize an established perspective transform
called Inverse Perspective Mapping (IPM) (Mallot
et al., 1991). This transform projects pixels of
surround-view images into a flat plane by computing a
homography matrix that relies on the camera calibra-
tions. IPM images are used in many perception tasks,
such as parking slots detection (Zhang et al., 2018;
Do and Choi, 2020; Wang et al., 2023) and Simulta-
neous Localization and Mapping (SLAM) tasks (Lee
et al., 2023).
One significant drawback of IPM lies in its as-
sumption that the world is flat since objects with
Benaissa, R., Musabini, A., Benmokhtar, R., Bakthavatchalam, M. and Perrotton, X.
BevGAN: Generative Fisheye Cross-View Transformers.
DOI: 10.5220/0013122200003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 2, pages 153-163
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
153

heights (e.g. vehicles, trees and poles) are severely
distorted and thus occlude other objects that are not
directly in the camera’s line of sight. Additionally, er-
rors in camera calibrations contribute to IPM’s failure
to seamlessly merge the projected perspective views
(see Figure 1f).
In commercial vehicles, the coverage range of the
BEV images is limited to a very short distance around
the ego-vehicle (i.e., ±5 meters) to diminish image
deformations. Consequently, IPM is primarily em-
ployed for parking applications rather than broader
driving scenarios which limits the drivers visibility of
their surroundings and prevents them from having a
satisfactory user experience (Musabini et al., 2021).
This work aims to overcome these challenges and
improve the driver experience across both parking and
driving scenarios. To the best of our knowledge, this
is the first attempt to generate BEV images using Gen-
erative Adversarial Networks (GAN) by exploiting
BEV features that are directly obtained from distorted
surround-view fisheye images. Our main contribu-
tions are :
• A novel geometry-guided Conditional Generative
Adversarial Networks (cGANs) model referred to
as BevGAN. The proposed architecture leverages
robust mechanisms for features extraction and in-
herently acquires mappings from individual cam-
era views to infer BEV features representation.
The latter are then transformed into BEV images
all in a GAN-like framework.
• BevGAN generates BEV images of significantly
higher quality compared to IPM and generative
state-of-the-art methods. Furthermore, BevGAN
generation capabilities span across diverse driv-
ing scenarios, while the BEV coverage range is
expanded to a distance of ±12m around the ego-
vehicle.
2 RELATED WORK
2.1 Vision-Centric BEV Perception
Vision-centric BEV perception focuses on transform-
ing one or multiple view inputs into BEV represen-
tations that are subsequently used to perform crucial
downstream perception tasks (i.e. objects detection,
lanes and maps segmentation, etc...). Current liter-
ature is divided into two main streams: geometry-
based and network-based transformations (May et al.,
2022).
Geometry-based transformations explicitly lever-
ages the geometric properties of physical cameras to
(a) Front. (b) Rear. (c) Left. (d) Right.
(e) Ground truth. (f) IPM. (g) BevGAN.
Figure 1: We propose a geometry-guided generative ad-
versarial framework (BevGAN) that generates a BEV im-
age from four surround-view fisheye images. Compared to
IPM(1f), BevGAN fuses surround-view images into a uni-
fied BEV grid where the positioning of each object in the
scene is known through a learnt transform. In (1g), no dis-
tortions are observed and the objects appearances are pre-
served thanks to GANs capabilities in generating unseen ar-
eas, resulting on a scene that is more faithful to the ground
truth (1e).
establish a natural projection relationship between the
views. A pioneering work is IPM, as introduced in
Section 1. It efficiently transforms the views through
a homography matrix that is derived from intrinsic
and extrinsic parameters of the camera. However,
it falls short in meeting the intricacies of real-world
driving as it relies on a rigid flat plane assumption that
causes noticeable distortions on objects lying above
the flat plane (for example vehicles, buildings, pedes-
trians). Despite other attempts to reduce the distor-
tions by performing IPM on objects footprint segmen-
tation maps (Loukkal et al., 2021; Can et al., 2020)
and feature maps (Reiher et al., 2020) to align with
the flat ground assumption, it is still present.
Network-based methods implicitly incorporate
camera geometry using neural networks to learn a
cross-view mapping (Yang et al., 2021; Zou et al.,
2023). In particular, transformers-based networks are
widely used in dense and sparse perception tasks for
their expressiveness (May et al., 2022). These meth-
ods utilize cross-attention between the BEV queries
and the input image features to transform the views
(May et al., 2022; Zhou and Krahenbuhl, 2022; Ji-
achen et al., 2022; Bartoccioni et al., 2022; Yang
et al., 2023).
However, capitalizing on the rich BEV representa-
tions to generate BEV images remains a nascent field
of research as we report only one work (Gieruc et al.,
2024) that exploits TriPlane representations to gener-
ate BEV images.
Moreover, only few prior works consider fisheye
camera geometry (Samani et al., 2023) (Musabini
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
154

et al., 2024) or use a combination of both fisheye and
pinhole cameras (Pham et al., 2024).
2.2 Generative Adversarial Networks
GANs were introduced to synthesize new images
from a complex, high-dimensional training distribu-
tion (Goodfellow et al., 2020). It consists of two net-
works trained adversarially : a generator G that learns
to generate photo-realistic images from a noise vector
and a discriminator D that learns to distinguish be-
tween the generated and ground truth images.
Many variants of GANs use novel networks ar-
chitectures and loss functions to leverage specific
tasks like super-resolution (Ledig et al., 2017), text-
to-image translation (Zhang et al., 2017) or images
editing (Pan et al., 2023).
Among Conditional Generative Adversarial Net-
works (cGANs) applications, image-to-image trans-
lation (also called cross-domain image translation)
achieved prominent success in mapping images of a
source domain X to a target domain Y . Early endeav-
ors (Zhu et al., 2017; Isola et al., 2017; Wang et al.,
2018) concentrated on transforming aligned source
and target domains, where geometrical transforma-
tions between the domains views are insignificant.
Recent approaches (Jain et al., 2021; Zhu et al.,
2018) exploit semantic segmentation or geometry in-
formation (such as depth or homography estimation)
to handle unaligned domains. BridgeGAN (Zhu et al.,
2018) generates a BEV image of a driving scene from
a single frontal view image by incorporating the ho-
mography image as an intermediate view to a multi-
GAN framework designed such that frontal, homog-
raphy and bird eye views share the same feature rep-
resentation. However, this method highly depends on
homography view and distortions are still present. A
video-to-video translation model (Jain et al., 2021)
was also introduced to generate BEV driving se-
quences from egocentric RGB videos using an addi-
tional branch that estimates the optical flow map to
ensure temporal consistency between the generated
frames. However, this method produces blurrier im-
ages over time due to accumulated generations errors
and some inconsistencies related to global structure
of the scene are also reported.
Shifting to semantic-guided approaches, the gen-
erator in (Regmi and Borji, 2019; Wu et al., 2023)
is forked to produce both target-view images and
segmentation maps to learn rich semantic features
through the optimization of alignment losses. In (Ren
et al., 2021; Tang et al., 2020a; Tang et al., 2019;
Ren et al., 2023), the generator is conditioned by
real target-view segmentation maps to learn shared
features that progressively align domains. Over-
all, semantic-guided frameworks mostly depend on
target-view segmentation maps at inference time or
have heavy, complex architectures that hardly learn
efficient mappings between the views.
To date, none of the existing methods handle fish-
eye images and multiple surround-view images fu-
sion. In this work, we formulate our task as a cross-
view image-to-image translation task and propose a
geometry-based model that involves four surround-
view fisheye images (i.e. front, rear, left and right
fisheye images). Instead of relying on hard geometry
transforms, it learns an estimate of the 3D objects lo-
cations in the scene to construct pertinent BEV map-
pings. The generative capabilities of our model al-
low to translate these mappings into a BEV image that
faithfully represents the scene.
3 METHODOLOGY
3.1 The Proposed Cross-View
Transformers-Based GAN
Our goal is to generate a high-fidelity BEV image
considering a set of four surround-view fisheye im-
ages (I
k
∈ R
W ×H×3
)
4
k=1
each having a corresponding
camera intrinsics matrix K
k
∈ R
3×3
, extrinsic rotation
matrix R
k
∈ R
3×3
and translation vector t
k
∈ R
3
rel-
ative to the center of the ego-vehicle.
To accomplish that, we introduce a novel
geometry-guided cross-view image-to-image transla-
tion GAN architecture, referred to as BevGAN. Using
cameras calibration and attention mechanisms, it im-
plicitly models geometrical transformations between
the views to produce rich BEV features representa-
tion.
BevGAN overall architecture is presented in Fig-
ure 2. It comprises multi-scale discriminators and
a transformers-based generator designed with an en-
coder and decoder built upon cross-view transformer
(Zhou and Krahenbuhl, 2022) and Pix2PixHD (Wang
et al., 2018) frameworks respectively.
The key elements of BevGAN are outlined in the
following sections.
3.1.1 BEV Grid Construction
BEV grid representations are constructed by adapting
the dense query-based encoder of Cross-view Trans-
formers (Zhou and Krahenbuhl, 2022) to take input
images acquired from four fisheye cameras, instead of
the original six pinhole cameras.
BevGAN: Generative Fisheye Cross-View Transformers
155

Fisheye-camera-aware
Positional Encodings
Generated image
Ground truth image
Image
Generation Head
Multi-scale features
.
.
.
B.E.V grid construction
B.E.V queries
?
?
?
?
?
?
?
?
?
Cross-attention layers
Fisheye images
Features
Extractor
Multi-scale discriminators
.
.
.
Flatten
Fake
Real
Fc + Softmax
Flatten
Fc + Softmax
Fake
Real
Figure 2: BevGAN architecture overview. Image features across multiple resolutions are extracted from surround-view
fisheye images. Combined with Positional encodings (see Figure 3) obtained from cameras position and intrinsics, the BEV
grid is constructed through a serie of cross-attention layers and passed to the decoder to generate the final BEV image. The
BEV image along with ground truth image are given to multi-scale discriminators for the discrimination process.
First, a features extractor builds up multi-scale
features φ
k
for each input image (see Figure 2) (Zhou
and Krahenbuhl, 2022). Two different resolutions
are considered, each processed independently to be
passed into a cross-view attention mechanism. The
latter matchs up a BEV representation with input im-
ages features by implicitly modeling the geometry
transformation between the views.
Starting from the lowest resolution, learnt BEV
embeddings are refined through the projection of
higher resolutions to better estimate the 3D location
of each object in the scene.
3.1.2 Fisheye-Camera-Aware Positional
Encoding
For each image coordinate x
(I)
i
, the angle of incidence
α
k,i
emanating from each fisheye camera lens is com-
puted based on its distance r
k,i
from the principal
point (center of projection) and the radial distortions
coefficients of each camera (c
k,l
)
4
l=1
.
r
k,i
= c
k,1
α
k,i
+ c
k,2
α
2
k,i
+ c
k,3
α
3
k,i
+ c
k,4
α
4
k,i
(1)
Equation 1 depicts the relationship between the
angle of incidence α
k,i
and the distance r
k,i
follow-
ing the Polynomial FishEye Transform (PEFT). The
computed polynomial root, α
k,i
, encodes the depth in-
formation of a new world coordinate. The latter is
multiplied by the inverse of the camera extrinsic rota-
tion matrix R
k
and translation vector t
k
to obtain the
direction vector d
k,i
which represents a fisheye cam-
era positional encoding of the image coordinate x
(I)
i
.
Figure 3 illustrates a multi-view 3D visualization of
the fisheye camera positional encodings derived from
a single-frame scene.
(a) Side view. (b) Front view. (c) Top view.
Figure 3: A multi-view 3D visualization of fisheye-camera
positional encodings derived from a single-frame scene.
The vehicle’s center is positioned at pixel coordinates (0, 0)
and the z-axis depicts height above ground level. The po-
sitional encoding of each camera is represented by a color
: red for front camera, yellow for rear camera, blue for left
camera and green for right camera.
The direction vector d
k,i
is encoded, using an MLP
shared across all k views, into a D-dimensional posi-
tional embedding δ
k,i
∈ R
128
.
3.1.3 Image Generation Head
The proposed decoder is constructed upon the global
generator of Pix2PixHD (Wang et al., 2018) which
has proven to be effective for high-resolution image-
to-image translation and style transfer tasks (Johnson
et al., 2016). It consists of a sequence of 9 residual
blocks followed by a transposed convolutional back-
end (which is composed of 3 blocks of 3 × 3 convo-
lution of stride
1
2
, instance normalization and ReLU
layers).
3.1.4 Multi-Scale Discriminators
In order to generate coherent scene representation
with finer details, it is necessary to design a discrimi-
nator that has a large receptive field. Inspired by pre-
vious works (Wang et al., 2018; Tang et al., 2020b),
we adopt multi-scale discriminators which comprise
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
156

three identical convolutional PatchGAN classifiers
(Isola et al., 2017) that operate at different scales. For
each discriminator D
k
, k = {1, 2, 3}, we downsample
input images by a factor of 2
k−1
.
3.2 Optimization Scheme
Three optimization loss functions are considered in
BevGAN : i) a least-square adversarial loss L
lsgan
(Mao et al., 2017) , ii) a feature matching loss L
FM
(Isola et al., 2017) and iii) a VGG perceptual loss
L
V GG
(Isola et al., 2017). The generator G and dis-
criminators D
k
, k = {1, 2, 3} are alternately optimized
according to the following optimization problem :
L
BevGAN
= arg min
G,D
3
∑
k=1
L
lsgan
(G, D
k
)+
λ(
3
∑
k=1
L
FM
(G, D
k
) + L
V GG
(G))
(2)
where λ controls the importance given to the visual
losses L
FM
and L
V GG
.
4 EXPERIMENTS
4.1 Parallel Domain Dataset
The dataset used in this work was procedurally gen-
erated using the synthetic data platform developed at
Parallel domain (Parallel Domain Plateform, nd). To
ensure visual diversity in the images, three different
scenario types were generated:
1. Highway scenario
2. Urban scenario with high pedestrian density
3. Parking scenarios with the following parking slot
variations :
• Angled parking slots
• Parallel parking slots
• Perpendicular slots
Each scenario contains high fidelity renderings
(and all the associated annotations) for four surround-
view cameras and a BEV camera viewing the scene
orthogonally as illustrated in Figure 4.
4.2 Evaluation Metrics
Drawing from previous works (Wu et al., 2023; Ren
et al., 2023; Tang et al., 2020a; Regmi and Borji,
2019; Zhu et al., 2018; Ren et al., 2021), the follow-
ing quantitative metrics have been selected to assess
the quality of the generated images.
(a) Highway. (b) Urban. (c) Angled.
(d) Parallel. (e) Perpendicular.
Figure 4: Illustration of BEV samples from each scene type
of Parallel Domain dataset.
• Peak Signal-to-Noise Ratio (PSNR) operates at
the pixel-level. It is defined as the ratio between
the maximum of a signal f and the power of cor-
rupting noise that affects the fidelity of its repre-
sentation.
• Multi-Scale Structural SIMilarity (MS-
SSIM)(Wang et al., 2003) value ranges from 0
to 1. MS-SSIM compares two images patches at
multiple scales based on their luminance, contrast
and structure.
• Sharpness Difference (SD) measures the similar-
ity between real and generated images in terms
of sharpness by computing the difference between
their gradients.
• Learned Perceptual Image Patch Similarity
(LPIPS) computes the difference between the
feature maps patches of the real and gener-
ated images extracted at different layers of a
pre-trained model (a VGG-network, AlexNet or
SqueezeNet...) using L1-distance.
• Frechet Inception Distance (FID)(Heusel et al.,
2017) uses frechet distance to measure differences
in density between two distributions at the deepest
layers of an Inception-v3 classifier.
4.3 Implementation Details
In all experiments, we use an EfficientNet-V2 Medium
(Tan and Le, 2021) as the features extractor and set
the weight λ = 10 (see Equation 2). Other networks
parameters remain unchanged. BevGAN is trained
on a 40G NVIDIA A100 GPU for 80 epochs follow-
ing the splitting scheme established in Table 1. We
use AdamW optimizer and the one-cycle learning rate
scheduler (Smith and Topin, 2018) with a learning
rate of 10
−3
for both generator and discriminators.
BevGAN: Generative Fisheye Cross-View Transformers
157

Table 1: Training and test sets splitting scheme for Parallel Domain Dataset.
Scenes Highway Urban
Parking
Angled Parallel Perpendicular
Training set images 5350 6850 6720 8625 5350
Test set images 650 650 745 975 650
Total 6000 7500 7465 9600 6000
The batch size is set to 9 which is the largest size that
the model can accommodate within the GPU capacity.
Surround-view fisheye images are resized to
640 × 528 and BEV images are cropped and re-
sized such that it covers an area of ±12m around the
ego-vehicle with a corresponding pixels resolution of
200 × 200 for a BEV grid size of 25 × 25.
4.4 Results
4.4.1 State-of-the-Art Comparison
The proposed BevGAN is compared to three meth-
ods : IPM, Pix2PixHD and PanoGAN. IPM is the
cutting-edge method deployed in parking assistance
and monitoring systems to transform multiple inputs
into a single BEV image.
Pix2PixHD originally generates high-resolution
images from a single input of a different domain (for
example, edges-to-image or labels-to-image transla-
tion (Wang et al., 2018)). Because BevGAN employs
similar decoder and discriminators, contrasting the
two models gives an assessment of the transformer-
based encoder ability to construct a detailed BEV
grid.
On the other hand, PanoGAN is the state-of-the-
art method for cross-view image-to-image translation.
It is designed to handle more significant geometrical
transformations since it synthesizes a panorama im-
age from a single BEV image.
Pix2PixHD and Panogan are adapted and trained
on Parallel Domain dataset following the training
scheme in 1, using the same hyper-parameters as set
in their respective papers. Both models initially take
one single input image. To accommodate to our task,
the four fisheye images were arranged in a 2 by 2 grid
then fed to the models as a single input.
Quantitative Evaluation. The quantitative evalua-
tion results obtained on Parallel Domain dataset are
presented in Table 2. It is noticeable that BevGAN
achieves the best scores on all presented metrics.
In comparison to IPM, an improvement of +6.2db
on PSNR, +170% on MS-SSIM and +22% on SD
is observed. Moreover, BevGAN outperforms both
Multi-input PanoGAN and Multi-input Pix2PixHD
by a large margin as we report an improvement of
+2.66db and +1.87db on PSNR and +35% and
+20% on MS-SSIM respectively. These results in-
dicate that BevGAN is able to produce BEV im-
ages with higher quality than other leading meth-
ods. Scores achieved on high-level evaluation metrics
(LPIPS and FID) demonstrate the expressiveness of
the BEV representations obtained with BevGAN as it
allows the generation of diverse, high-quality images.
Table 3 presents quantitative evaluation of Bev-
GAN on Parallel Domain dataset for each scene type.
It is worth mentioning that BevGAN performs better
on highway scenes in contrast to urban and parking
scenes. In fact, parking and urban scenes simulate
more complex and detailed environments, featuring
high pedestrians density in urban areas and a variety
of parking slot types and markings in parking scenar-
ios (see Figure 4). Moreover, only a small number of
scenes include challenging conditions (like night and
snow scenes). Plus, these scenes are predominant in
parking scenarios making it difficult for the model to
effectively learn their characteristics.
Qualitative Evaluation. Figure 5 illustrates quali-
tative results obtained with leading methods on vari-
ous scenes of Parallel Domain dataset. It is observ-
able that BevGAN produces more realistic BEV im-
ages across all scenarios closely matching the corre-
sponding ground truth images. Compared to IPM, all
generative methods provide distortion-free represen-
tations of the generated objects. Although, BevGAN
is able to identify all objects in the scene and repre-
sents them more accurately in terms of shape, color,
and sharpness.This holds true even in complex sce-
narios (see row 2 and 5) where textured objects with
varied sizes (vehicles, pedestrians, etc...) and various
road and parking slots markings, are present. Further-
more, BevGAN synthesizes a scene where invisible
regions (ie. regions that are originally invisible in
surround-view images) are consistent with respect to
the visible parts of the scene (see the vehicles roofs,
vehicles occluded by the blue vehicle in row 5).
4.4.2 Ablation Study
An ablation study was conducted on Parallel Domain
dataset to assess the effectiveness of the proposed
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
158
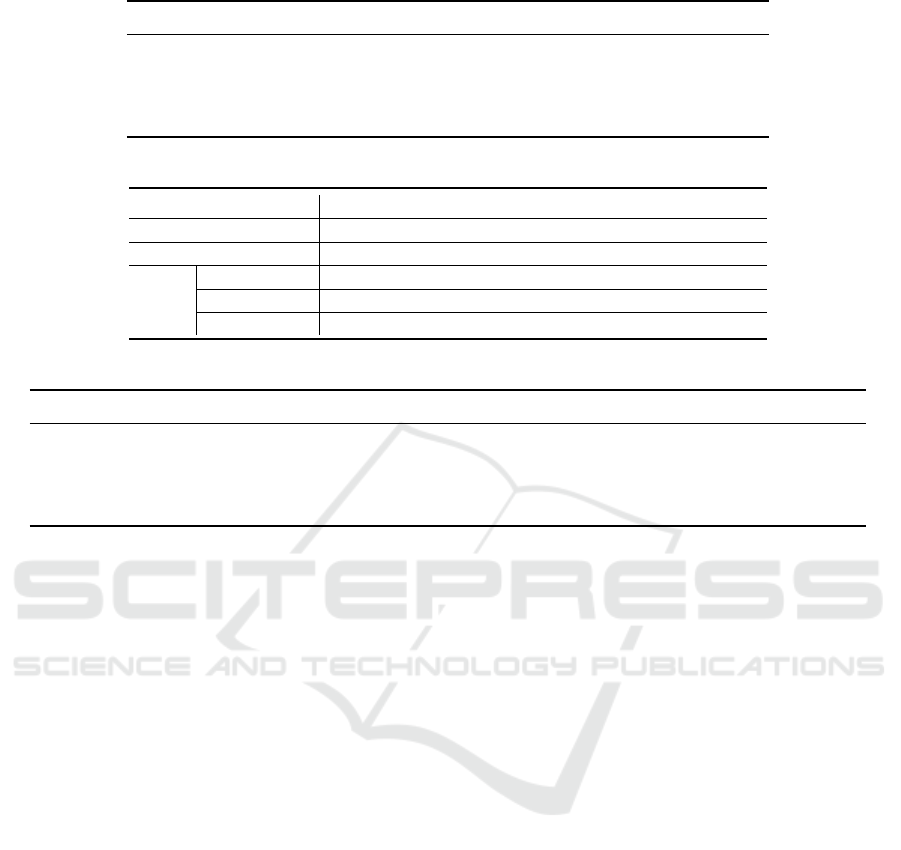
Table 2: Quantitative evaluation of BevGAN against state-of-the-art methods on Parallel Domain Dataset.
Method PSNR (↑) MS-SSIM (↑) LPIPS (↓) SD (↓) FID (↓)
IPM 17.14 0.30 0.47 0.22 249.46
Multi-input PanoGAN 20.68 0.60 0.40 0.23 176.80
Multi-input Pix2PixHD 21.47 0.67 0.29 0.20 114.33
BevGAN (ours) 23.34 0.81 0.17 0.18 52.7
Table 3: Quantitative evaluation of BevGAN on Parallel Domain Dataset based on scenes type.
Scenes PSNR (↑) MS-SSIM (↑) LPIPS (↓) SD (↓) FID (↓)
Urban 23.11 0.8 0.18 0.23 89.29
Highway 25.54 0.85 0.13 0.13 42.00
Parking
Angled 23.5 0.81 0.19 0.20 89.75
Parallel 23.26 0.83 0.19 0.14 113.87
Perpendicular 21.75 0.82 0.17 0.13 116.30
Table 4: Ablation study of the proposed BevGAN on Parallel Domain Dataset.
Variant Description PSNR (↑) MS-SSIM (↑) LPIPS (↓) SD (↓) FID (↓)
A generator + VGG 18.76 0.67 0.32 0.18 108.82
B generator + discriminator + VGG 21.5 0.72 0.23 0.20 67.20
C generator + discriminator + FM 22.65 0.77 0.22 0.19 83.12
BevGAN generator + discriminator + all losses 23.34 0.81 0.17 0.18 52.7
BevGAN model. Table 4 provides a quantitative com-
parison of various BevGAN variants. Variant A in-
cludes the generator only, which is trained in a super-
vised manner using input fisheye images and corre-
sponding BEV images. In this configuration, the op-
timization focuses solely on minimizing the VGG loss
since that both adversarial and FM losses depend on
the discriminator (see Equation 2). Compared to this
variant, BevGAN demonstrates a significant increase
in performances on all evaluation metrics with a dif-
ference of 4.58db in PSNR and a increase of +21%
in MS-SSIM. These results confirm that the use of a
generative model is more adequate for the task.
The two remaining variants (variants B and C) in-
clude both the generator and discriminator. They eval-
uate the impact of each visual loss on the quality of
the generated images by employing only one visual
loss at a time. Results from Variant B indicate that
adding the FM loss substantially improves the perfor-
mances. Although adding VGG loss also improves
the results, its effect is less pronounced compared to
the feature matching loss, as observed from evalua-
tion results of Variant C.
4.4.3 Generalization Ability
Given the non-existence of a publicly available
dataset containing paired real-world surround-view
fisheye and corresponding BEV images, all prior ex-
periments were conducted on Parallel Domain’s syn-
thetic dataset. When transitioning to real-world im-
ages, the current implementation of BevGAN shows
poor generalization capabilities (see Figure 6). Since
that direct training or fine-tuning on a real dataset is
not feasible, we chose to retrain our model using the
following data augmentations to improve its general-
ization capabilities.
• Image-level data augmentations : image dropout
with a probability p ∈ [0.0, 0.01], sharpening,
change in brightness and hue channels.
• Roll rotations of one degree per camera.
• BEV Flip Left/Right and rotations of fixed de-
grees (90
◦
, 180
◦
and 270
◦
) on yaw axis with a
probability of 0.8.
Table 5 provides a comparative evaluation be-
tween BevGAN and BevGAN
†
, the variant trained us-
ing previously cited augmentations. Despite that Bev-
GAN outperforms BevGAN
†
showing a difference of
0.64db in PSNR and 20% in MS-SSIM, BevGAN
†
demonstrates superior generalization capabilities, as
highlighted in Figure 6. Additional zero-shot in-
ferences of IPM and BevGAN
†
on our internal real
dataset are illustrated in Figure 7. The generated im-
ages demonstrate that BevGAN
†
accurately locates
vehicles and parking slots in the scene. Neverthe-
less, we report some distortions and a drop in tex-
tural quality as the captured distributions depend on
the synthetic dataset on which the model was origi-
BevGAN: Generative Fisheye Cross-View Transformers
159
(a) GT. (b) IPM. (c) PanoGAN. (d) Pix2PixHD. (e) BevGAN.
Figure 5: Qualitative comparison between different methods on Parallel Domain dataset. From left to right : Ground Truth,
IPM, Multi-input PanoGAN, Multi-input Pix2PixHD and BevGAN (ours). The proposed BevGAN generates more realistic
results with finer details on all scenes settings compared to other state-of-the-art methods.
Table 5: Quantitative evaluation of BevGAN against
BevGAN
†
on Parallel Domain Dataset.
Method PSNR (↑)MS-SSIM (↑)LPIPS (↓)SD (↓)FID (↓)
BevGAN 23.34 0.81 0.17 0.18 52.7
BevGAN
†
22.7 0.76 0.23 0.2 70
nally trained. That being said, BevGAN
†
struggles to
reproduce objects not encountered during the training
phase, such as buildings and road markings, which are
absent from Parallel Domain Dataset.
5 CONCLUSION
In this work, we introduce BevGAN : a novel
geometry-guided cGANs model designed to generate
a BEV image from a set of four surround-view fish-
eye images. BevGAN integrates two key elements :
a cross-view transformer-based generator and multi-
scale discriminators. The generator operates across
multiple scales and leverages fisheye-camera-aware
positional embeddings to generate high-quality BEV
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
160

(a) Fisheye. (b) IPM.
(c) BevGAN. (d) BevGAN
†
.
Figure 6: Example of zero-shot inference of BevGAN on
real-world fisheye images.
images that faithfully represent the scene.
Experiments conducted on a synthetic dataset
demonstrate that the proposed BevGAN outperforms
leading methods used in parking assistance and vision
monitoring systems, as well as state-of-the-art GAN
approaches for cross-view generation. Moreover, ex-
periments show that with just a few added augmenta-
tion strategies, BevGAN can effectively generalize to
images acquired from real cameras.
BevGAN introduces promising performances for
practical integration into advanced around-view sys-
tems for real-world vehicles. Notably, our method
expands the covered area around the ego-vehicle to
a range of ±12m, which is a significant improvement
compared to the ±5m coverage range offered by cur-
rent systems.
Future works will focus on exploring novel view
representations like Tri-Perspective View (TPV) rep-
resentation (Huang et al., 2023) (Gieruc et al., 2024)
for a robust description of the 3D scene. Additionally,
steps will be taken to collect a more diverse dataset
encompassing a larger range of driving and parking
scenarios.
REFERENCES
Bartoccioni, F., Zablocki, E., Bursuc, A., Perez, P., Cord,
M., and Alahari, K. (2022). Lara: Latents and rays for
multi-camera bird’s-eye-view semantic segmentation.
In 6th Annual Conference on Robot Learning.
Business Research Insights (n.d.). Business research in-
sights. Accessed: Febuary 2024.
(a) Fisheye images. (b) IPM. (c) BevGAN
†
.
Figure 7: Qualitative comparison between IPM and aug-
mented BevGAN on real-world fisheye images.
Can, Y. B., Liniger, A., Unal, O., Paudel, D. P., and Gool,
L. V. (2020). Understanding bird’s-eye view of road
semantics using an onboard camera. IEEE Robotics
and Automation Letters, 7:3302–3309.
Do, H. and Choi, J. Y. (2020). Context-based parking
BevGAN: Generative Fisheye Cross-View Transformers
161

slot detection with a realistic dataset. IEEE Access,
8:171551–171559.
Gieruc, T., K
¨
astingsch
¨
afer, M., Bernhard, S., and Salzmann,
M. (2024). 6img-to-3d: Few-image large-scale out-
door driving scene reconstruction.
Goodfellow, I., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A., and Ben-
gio, Y. (2020). Generative adversarial networks.
Commun. ACM, 63(11):139–144.
Heusel, M., Ramsauer, H., Unterthiner, T., Nessler, B., and
Hochreiter, S. (2017). Gans trained by a two time-
scale update rule converge to a local nash equilibrium.
In Proceedings of the 31st International Conference
on Neural Information Processing Systems, NIPS’17,
page 6629–6640, Red Hook, NY, USA. Curran Asso-
ciates Inc.
Huang, Y., Zheng, W., Zhang, Y., Zhou, J., and Lu, J.
(2023). Tri-perspective view for vision-based 3d se-
mantic occupancy prediction.
Isola, P., Zhu, J.-Y., Zhou, T., and Efros, A. A. (2017).
Image-to-image translation with conditional adversar-
ial networks. CVPR.
Jain, V., Wu, Q., Grover, S., Sidana, K., Chaudhary, D.-G.,
Myint, S., and Hua, Q. (2021). Generating bird’s eye
view from egocentric rgb videos. Wireless Communi-
cations and Mobile Computing, 2021:1–11.
Jiachen, L., Zheyuan, Z., Xiatian, Z., Hang, X., and Li, Z.
(2022). Learning ego 3d representation as ray tracing.
Johnson, J., Alahi, A., and Fei-Fei, L. (2016). Perceptual
losses for real-time style transfer and super-resolution.
In Leibe, B., Matas, J., Sebe, N., and Welling, M.,
editors, Computer Vision – ECCV 2016, pages 694–
711, Cham. Springer International Publishing.
Ledig, C., Theis, L., Huszar, F., Caballero, J., Cunning-
ham, A., Acosta, A., Aitken, A., Tejani, A., Totz, J.,
Wang, Z., and Shi, W. (2017). Photo-realistic single
image super-resolution using a generative adversarial
network. In 2017 IEEE Conference on Computer
Vision and Pattern Recognition (CVPR), pages 105–
114, Los Alamitos, CA, USA. IEEE Computer Soci-
ety.
Lee, Y., Kim, M., Ahn, J., and Park, J. (2023). Accurate
visual simultaneous localization and mapping (slam)
against around view monitor (avm) distortion error us-
ing weighted generalized iterative closest point (gicp).
Sensors, 23(18).
Loukkal, A., Grandvalet, Y., Drummond, T., and Li, Y.
(2021). Driving among flatmobiles: Bird-eye-view
occupancy grids from a monocular camera for holistic
trajectory planning. In 2021 IEEE Winter Conference
on Applications of Computer Vision (WACV), pages
51–60.
Mallot, H., B
¨
ulthoff, H., J.J., L., and S, B. (1991). Inverse
perspective mapping simplifies optical flow computa-
tion and obstacle detection. Biological cybernetics,
64:177–85.
Mao, X., Li, Q., Xie, H., Lau, R. Y. K., Wang, Z., and Smol-
ley, S. P. (2017). Least squares generative adversarial
networks. In 2017 IEEE International Conference
on Computer Vision (ICCV), pages 2813–2821, Los
Alamitos, CA, USA. IEEE Computer Society.
May, Y., Wangy, T., Baiy, X., Yang, H., Hou, Y., Wang, Y.,
Qiao, Y., Yang, R., Manocha, D., and Zhu, X. (2022).
Vision-centric bev perception: A survey.
Musabini, A., Bozbayir, E., Marcasuzaa, H., and Ram
´
ırez,
O. A. I. (2021). Park4u mate: Context-aware digi-
tal assistant for personalized autonomous parking. In
2021 IEEE Intelligent Vehicles Symposium (IV), pages
724–731. IEEE.
Musabini, A., Novikov, I., Soula, S., Leonet, C., Wang, L.,
Benmokhtar, R., Burger, F., Boulay, T., and Perrotton,
X. (2024). Enhanced parking perception by multi-task
fisheye cross-view transformers.
Pan, X., Tewari, A., Leimk
¨
uhler, T., Liu, L., Meka, A., and
Theobalt, C. (2023). Drag your gan: Interactive point-
based manipulation on the generative image manifold.
In ACM SIGGRAPH 2023 Conference Proceedings.
Parallel Domain Plateform (n.d.). Parallel domain. Ac-
cessed: Febuary 2024.
Pham, T., Maghoumi, M., Jiang, W., Jujjavarapu, B. S. S.,
Sajjadi, M., Liu, X., Lin, H.-C., Chen, B.-J., Truong,
G., Fang, C., et al. (2024). Nvautonet: Fast and accu-
rate 360deg 3d visual perception for self driving. In
Proceedings of the IEEE/CVF Winter Conference on
Applications of Computer Vision, pages 7376–7385.
Regmi, K. and Borji, A. (2019). Cross-view image synthe-
sis using geometry-guided conditional gans. Com-
puter Vision and Image Understanding, 187:102788.
Reiher, L., Lampe, B., and Eckstein, L. (2020). A sim2real
deep learning approach for the transformation of im-
ages from multiple vehicle-mounted cameras to a se-
mantically segmented image in bird’s eye view. In
2020 IEEE 23rd International Conference on Intelli-
gent Transportation Systems (ITSC), pages 1–7.
Ren, B., Tang, H., and Sebe, N. (2021). Cascaded cross
mlp-mixer gans for cross-view image translation. In
British Machine Vision Conference.
Ren, B., Tang, H., Wang, Y., Li, X., Wang, W., and Sebe,
N. (2023). Pi-trans: Parallel-convmlp and implicit-
transformation based gan for cross-view image trans-
lation. In ICASSP 2023 - 2023 IEEE International
Conference on Acoustics, Speech and Signal Process-
ing (ICASSP), pages 1–5.
Samani, E., Tao, F., Dasari, H., Ding, S., and Banerjee,
A. (2023). F2bev: Bird’s eye view generation from
surround-view fisheye camera images for automated
driving. 2023 IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS), pages 9367–
9374.
Smith, L. and Topin, N. (2018). Super-convergence: very
fast training of neural networks using large learning
rates. In Defense + Commercial Sensing.
Tan, M. and Le, Q. V. (2021). Efficientnetv2: Smaller mod-
els and faster training.
Tang, H., Xu, D., Sebe, N., Wang, Y., Corso, J. J., and
Yan, Y. (2019). Multi-channel attention selection gan
with cascaded semantic guidance for cross-view im-
age translation. 2019 IEEE/CVF Conference on Com-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
162

puter Vision and Pattern Recognition (CVPR), pages
2412–2421.
Tang, H., Xu, D., Yan, Y., Torr, P. H. S., and Sebe, N.
(2020a). Local class-specific and global image-level
generative adversarial networks for semantic-guided
scene generation. In 2020 IEEE/CVF Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 7867–7876.
Tang, W., Li, G., Bao, X., Nian, F., and Li, T. (2020b).
Mscgan: Multi-scale conditional generative adversar-
ial networks for person image generation. In 2020
Chinese Control And Decision Conference (CCDC),
pages 1440–1445.
TrueCar (n.d.). Truecar. Accessed: Febuary 2024.
Wang, L., Musabini, A., Leonet, C., Benmokhtar, R., Bre-
heret, A., Yedes, C., B
¨
urger, F., Boulay, T., and Per-
rotton, X. (2023). Holistic parking slot detection with
polygon-shaped representations. In 2023 IEEE/RSJ
International Conference on Intelligent Robots and
Systems (IROS), pages 5797–5803. IEEE.
Wang, T.-C., Liu, M.-Y., Zhu, J.-Y., Tao, A., Kautz, J., and
Catanzaro, B. (2018). High-resolution image synthe-
sis and semantic manipulation with conditional gans.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition.
Wang, Z., Simoncelli, E., and Bovik, A. (2003). Multiscale
structural similarity for image quality assessment. In
The Thrity-Seventh Asilomar Conference on Signals,
Systems & Computers, 2003, volume 2, pages 1398 –
1402 Vol.2.
Wu, S., Tang, H., Jing, X.-Y., Zhao, H., Qian, J., Sebe, N.,
and Yan, Y. (2023). Cross-view panorama image syn-
thesis. IEEE Transactions on Multimedia, 25:3546–
3559.
Yang, C., Chen, Y., Tian, H., Tao, C., Zhu, X., Zhang, Z.,
Huang, G., Li, H., Qiao, Y., Lu, L., et al. (2023).
Bevformer v2: Adapting modern image backbones to
bird’s-eye-view recognition via perspective supervi-
sion. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
17830–17839.
Yang, W., Li, Q., Liu, W., Yu, Y., Ma, Y., He, S., and Pan,
J. (2021). Projecting your view attentively: Monocu-
lar road scene layout estimation via cross-view trans-
formation. In 2021 IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
15531–15540.
Zhang, H., Xu, T., Li, H., Zhang, S., Wang, X., Huang,
X., and Metaxas, D. (2017). Stackgan: Text to photo-
realistic image synthesis with stacked generative ad-
versarial networks. In ICCV.
Zhang, L., Huang, J., Li, X., and Xiong, L. (2018). Vision-
based parking-slot detection: A dcnn-based approach
and a large-scale benchmark dataset. IEEE Transac-
tions on Image Processing, 27(11):5350–5364.
Zhou, B. and Krahenbuhl, P. (2022). Cross-view trans-
formers for real-time map-view semantic segmenta-
tion. In 2022 IEEE/CVF Conference on Computer Vi-
sion and Pattern Recognition (CVPR), pages 13750–
13759, Los Alamitos, CA, USA. IEEE Computer So-
ciety.
Zhu, J.-Y., Park, T., Isola, P., and Efros, A. A. (2017).
Unpaired image-to-image translation using cycle-
consistent adversarial networkss. In Computer Vision
(ICCV), 2017 IEEE International Conference on.
Zhu, X., Yin, Z., Shi, J., Li, H., and Lin, D. (2018). Genera-
tive adversarial frontal view to bird view synthesis. In
2018 International Conference on 3D Vision (3DV),
pages 454–463.
Zou, J., Xiao, J., Zhu, Z., Huang, J., Huang, G., Du, D., and
Wang, X. (2023). Hft: Lifting perspective represen-
tations via hybrid feature transformation for bev per-
ception. In 2023 IEEE International Conference on
Robotics and Automation (ICRA), pages 7046–7053.
BevGAN: Generative Fisheye Cross-View Transformers
163
