A Ship Routing Algorithm Generating Precise and Diverse Paths
Alexandre Copp
´
e and Nicolas Prcovic
Aix Marseille Univ, Universit
´
e de Toulon, CNRS, LIS, Marseille, France
Keywords:
Sea Routing, Multicriteria Optimization, Time Dependent Algorithm.
Abstract:
We present an algorithm that accurately determines the optimal trajectories of a ship in a multi-objective and
dynamic context, where factors such as travel time and fuel consumption must be considered under varying
weather conditions during the journey. Our approach combines two recent algorithms, NAMOA*-TD and
WRM, allowing us to obtain a range of precise and diverse trajectories (a subset of the Pareto front) from which
a user can choose. Initial experiments conducted using real meteorological data demonstrate the effectiveness
of this approach.
1 INTRODUCTION
Over 80% of global trade volume is transported by
sea. In 2018, within maritime transport, 40% of op-
erational costs were absorbed by fuel expenses dur-
ing a journey. Even a small improvement, no matter
how minimal, can have significant impacts on costs.
Therefore, routing ships based on weather conditions
is a field of great interest for both ecological and eco-
nomic reasons.
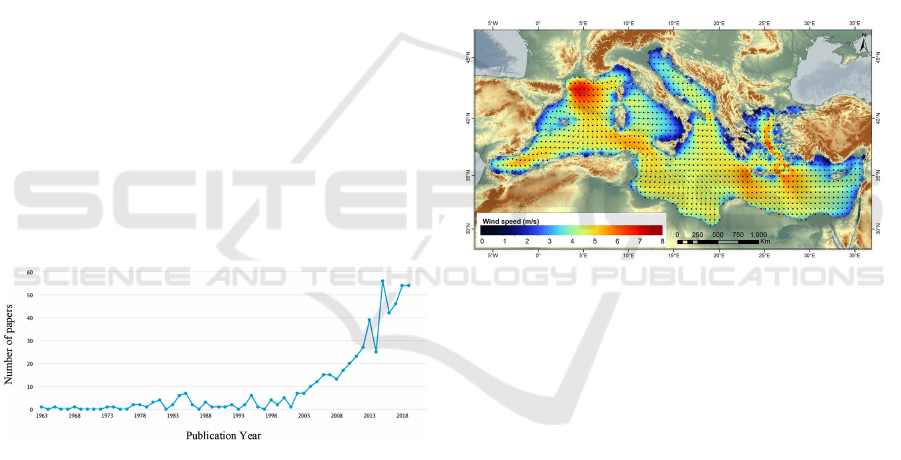
Figure 1: ”Number of publications on ship trajectories opti-
mization.” Source: Scopus February 2020.
The goal of our work is to find a ship route be-
tween two ports, arriving before a given date, while
optimizing fuel consumption and considering envi-
ronmental constraints, all within a context that up-
dates during the journey (currents, weather). In addi-
tion to maritime geography, departure and arrival lo-
cations and dates, we must consider ocean currents
and weather conditions. These are provided in the
form of a global grid divided into rectangular cells
within which currents and wind are considered uni-
form (see fig 2). This data allows us to calculate vari-
ous costs (time, fuel) associated with the route, which
depend on the wind and currents at a given moment.
Figure 2: Example of a weather grid. The arrows indicate
the direction of the wind and the colors represent its speed.
These forecasts are valid only for a specific period
(typically 6 hours), and for a journey, we need to re-
trieve the forecasts for the periods falling between the
ship’s departure and arrival dates.
Although the most realistic modeling of a ship’s
route is a continuous curve, data digitization re-
quires discretization. The digitized space and time
will therefore be a set of locations and dates, with the
number and precision of these points affecting the ef-
ficiency of the algorithms and the quality of the so-
lutions produced. Often, the locations are evenly dis-
tributed on a rectangular grid, forming a mesh that
covers the entire area of possible movements, aligned
with the weather grid.
The most classical approach is to represent the lo-
cations as a graph, where the edges connect vertices
corresponding to the closest locations (see Figure 3).
The edges are labeled with a cost vector (containing at
least the costs for time and fuel used to travel between
the two locations).
Tools that calculate routes in this context already
Coppé, A. and Prcovic, N.
A Ship Routing Algorithm Generating Precise and Diverse Paths.
DOI: 10.5220/0013122300003893
In Proceedings of the 14th International Conference on Operations Research and Enterprise Systems (ICORES 2025), pages 79-87
ISBN: 978-989-758-732-0; ISSN: 2184-4372
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
79

Figure 3: Example of 8- and 16-neighbor neighborhoods
where the vertices correspond to locations evenly dis-
tributed in a rectangular grid, as used in (Chauveau, 2018).
exist and are used by maritime routing companies.
However, the solutions currently in use fall short in
at least two aspects, according to the users we spoke
with:
• The routes provided are too coarse when near the
coast.
• Often, only a single route is proposed, whereas in
a multi-objective context, there are usually a large
number of possible routes (referred to as Pareto-
optimal, see 4). However, a ship’s captain may
have preconceived notions about the best route to
take, so they may struggle to accept a single solu-
tion that differs too much from what they initially
believe to be optimal. This highlights the useful-
ness of offering a diverse set of possible solutions,
among which they are more likely to find one that
suits them.
The structure of this article is as follows. We be-
gin by providing a formal definition of the problem
of finding an optimal route in a multi-objective and
dynamic context. Next, we present the existing algo-
rithms used to address this problem. Then, we intro-
duce our approach, based on two recent algorithms,
which allows us to obtain diverse and highly precise
routes to meet the demands of users in this field. Fi-
nally, we present experiments based on real data pro-
vided by the maritime transport company with which
we are collaborating.
1.1 Formal Definition of the Problem
Consider a directed graph equipped with a cost func-
tion c defined as: G = (N, A, c) , where N = {x
1
, . . . ,
x
n
} is a finite set of vertices, and A ⊂ N × N is a finite
set of |A| arcs of the form (x
i
,x
j
). Each arc a ∈ A is
associated with a cost function vector with values in
R, of the form c(a) = (c
1
(a), . . . , c
q
(a)), where q is
the number of evaluations of the graph, and c
i
is the
function that assigns the i
th
evaluation to an arc in the
graph. s ∈ N is the source vertex of the graph (starting
point), and p ∈ N is the sink vertex of the graph (des-
tination). A solution is a path starting from the source
vertex and ending at the sink vertex.
We are interested in the optimal paths between
two vertices of the graph. Let CH
i j
be the set of paths
from x
i
to x
j
in the graph G.
We define a cost vector C which associates with
each path ch
i j
the evaluation of the costs to traverse
this path. We aim to identify the path(s) ch
i j
∈ CH
i j
such that there does not exist a path ch
′
i j
∈ CH
i j
sat-
isfying C(ch
′
i j
) < C(ch
i j
). The operator < compares
vectors, which implies a partial order on the cost of
the paths.
2 SEARCHING FOR AN
OPTIMAL PATH IN A GRAPH
There are many algorithms for searching for optimal
paths in a weighted graph, which vary depending on
whether they are single-objective or multi-objective
and whether the edge cost(s) change over time.
All these algorithms assume that the journey is
made at a constant speed. Accounting for changes
in speed or engine power during the journey intro-
duces even greater complexity, which will be consid-
ered later.
2.1 Single-Objective Algorithms
Single-objective optimization involves optimizing
only one criterion and yields a single optimal solu-
tion.
The most well-known algorithm is Dijkstra’s algo-
rithm (Dijkstra, 1959), which uses a greedy approach
to obtain an optimal solution in O(nlogn) time, where
n is the number of vertices in the graph.
The A* algorithm (Hart et al., 1968) is a variant
of Dijkstra’s algorithm, initially designed to handle
cases where the graph (too large or even infinite) is
defined implicitly. It evaluates a path under construc-
tion by considering not only the cost of the path al-
ready traveled (as in Dijkstra) but also a heuristic un-
derestimation of the cost of the remaining path to be
traversed.
In practice, A* allows for faster selection of the
best path and significantly reduces the computation
time required to obtain the least costly path.
Multi-Objective Algorithms
Multi-objective algorithms aim to optimize multi-
ple criteria simultaneously, such as minimizing both
travel time and cost. These algorithms do not yield a
single optimal solution but rather a set of trade-off so-
lutions, known as Pareto-optimal solutions, where no
ICORES 2025 - 14th International Conference on Operations Research and Enterprise Systems
80
solution can improve one objective without worsen-
ing another.
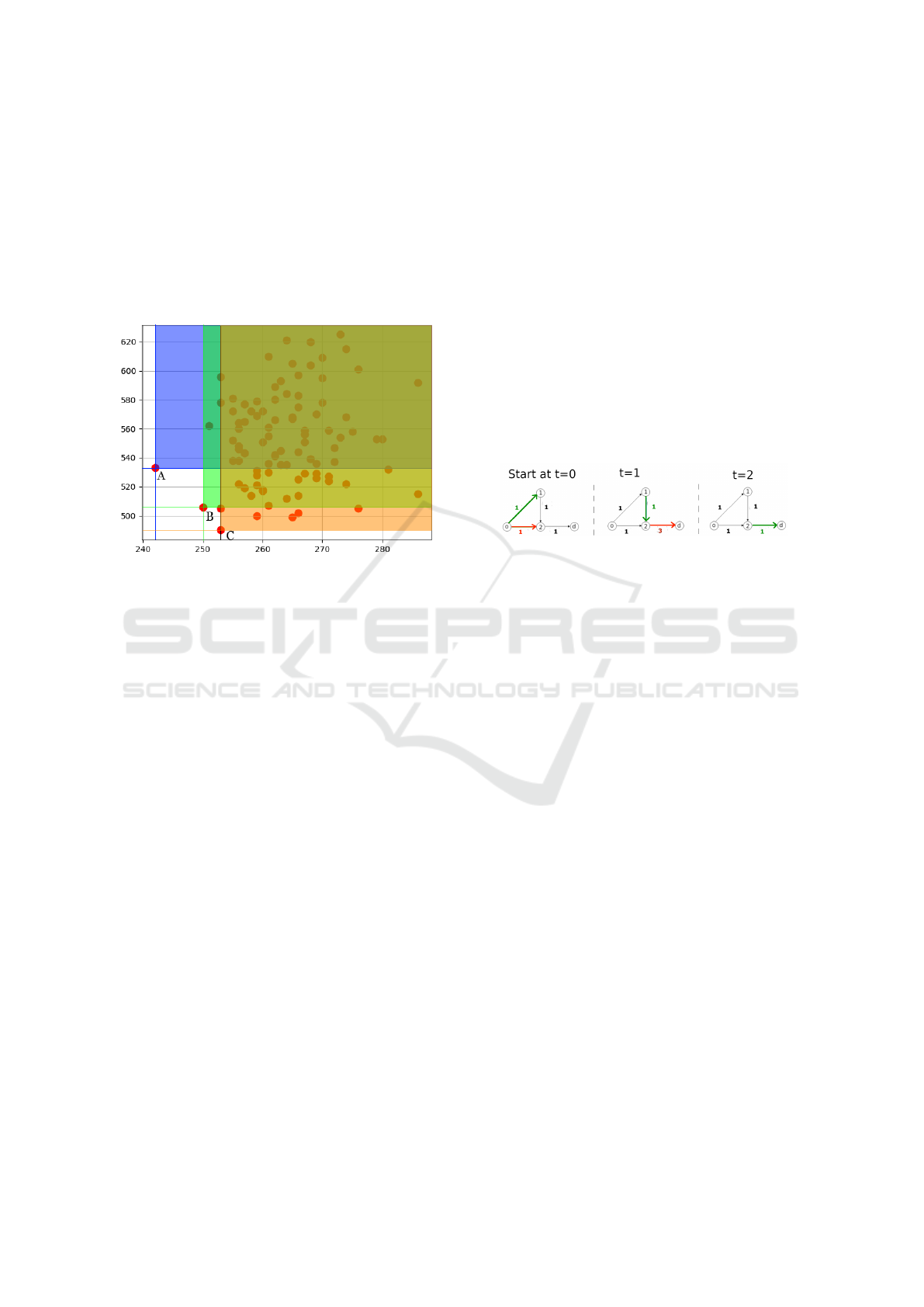
Pareto Front. When there are multiple criteria, one
solution can only be considered better than another
if it is better on all criteria. In this case, we say that
it dominates the other solution. Some solutions, how-
ever, are incomparable: one solution may be better on
one criterion but worse on another.
Figure 4: A solution set. In blue, green and orange are the
aeras dominated by the vertices A, B and C, which form the
Pareto front.
The set of solutions that are not dominated by any
other solution is called the Pareto front. A Pareto-
optimal solution has a cost vector such that there is
no alternative solution where any element of the cost
vector would be better.
A multi-objective problem presents the challenge
that an algorithm solving it must consider not only
the cost of the best solution to eliminate other poten-
tial candidates but all the cost vectors of the evolving
Pareto front. As a result, the problem becomes NP-
hard and potentially exhibits exponential complexity.
MOA* (Stewart and White, 1991) (Multi-
Objective A*) and NAMOA* (New Approach to
MOA*) (Mandow and De La Cruz, 2008) are general
variants of A* that take multi-objectivity into account.
Scalarization. The scalarization consists of linearly
combining different criteria to form a single one. If
we have three criteria c
1
, c
2
, and c
3
, the scalariza-
tion involves defining the function C(c
1
, c
2
, c
3
) =
α
1
.c
1
+α
2
.c
2
+α
3
.c
3
, where the α
i
are coefficients to
be determined, which specify the relative importance
of each cost c
i
.
By appropriately choosing the coefficients
(through dichotomic search on the parameters α
i
), the
entire convex hull of a Pareto front can be obtained
in polynomial time. The only solutions that will be
missing are the non-supported efficient solutions.
The major advantage of scalarization is that it allows
for quick resolution; however, since it only finds the
solutions on the convex hull of the Pareto front, it is
important that this hull contains a ”good” subset of
solutions in the given context.
In the remainder of the article, we will refer to a
scalar Dijkstra as a Dijkstra algorithm that handles
multi-objective problems by scalarizing the costs.
Time-Dependent Algorithms. When the edge
costs of a graph change over time (for example, due
to weather), the property that a sub-path of an opti-
mal path is itself optimal becomes false (see Figure
5). This property can no longer be used to eliminate
suboptimal partial paths. We must use other, weaker
criteria instead.
Figure 5: On this example we have a graph at 3 different
time (0,1,2), the paradox shown is that arriving later at a
vertex with a worse cost can optimise the overall travel cost:
arriving at vertex 1 at time 2 reduces the cost (1+1+1 instead
of 1+3).
In the context of maritime routing, we can
mention the Venetti algorithm (Veneti, 2015) and
NAMOA*-TD (Chauveau, 2018). To enable the elim-
ination of candidate partial paths, these algorithms
rely on two criteria:
• The cost is higher than that of an already found
solution.
• The cost is higher than that of a partial path arriv-
ing at the same vertex at the same time.
NAMOA*-TD, a ”time-dependent” version of
NAMOA*, proves to be much more efficient in prac-
tice than the Venetti algorithm (Chauveau, 2018).
This is primarily due to the fact that, unlike Venetti,
NAMOA*-TD uses a heuristic to estimate the cost of
the remaining path. This heuristic turns out to be a
sufficiently accurate estimate of reality, allowing it to
detect early on which candidate paths will be domi-
nated.
Although NAMOA*-TD appears to be an effec-
tive method in the context of international maritime
routing, enabling the calculation of realistic routes in
under two minutes, it has limitations that prevent it
from being fully satisfactory in our context. The rect-
angular and regular grid that determines the shape of
the trajectories is not precise enough when navigating
A Ship Routing Algorithm Generating Precise and Diverse Paths
81
near coasts or in narrow maritime zones (for exam-
ple, the English Channel): the maritime zone can be
narrower than the grid cells. The solution of reducing
the cell size leads to a significant increase in compu-
tation time. For instance, halving the size of the (rect-
angular) grid cells in both dimensions quadruples the
number of vertices in the graph, in a context where the
temporal complexity of the algorithms is exponential
with respect to the number of vertices.
In practice, the tool used by the shipping company
we consulted reduces the grid sizes in certain areas
where it was found necessary afterward. The draw-
back is that the graph must be constructed somewhat
”manually,” and it is difficult to precisely assess the
appropriate cell size depending on the location.
However, there is a recent approach that allows
fixing the density of the trajectory of a ship with arbi-
trarily high precision, which we will be able to adapt
to our context.
2.2 The Weather Routing Metaheuristic
Approach
Weather Routing Metaheuristic (WRM) (Grandcolas,
2022) is an innovative ship routing approach that does
not predefine vertices and allows for the generation of
routes where vertices can be located anywhere on the
navigable surface with an arbitrarily high degree of
precision.
The graph is determined by randomly generating
n vertices within a given area and creating an edge
between two vertices if the distance between them is
less than a specified constant. The ability to choose
n precisely allows for fine-tuning the size of the in-
stance, and thus the method’s execution time. The co-
ordinates of the vertices can be determined with the
desired level of precision. The fact that vertices are
drawn randomly (uniformly) rather than placed on a
regular grid does not prevent the point density from
remaining roughly uniform across the entire naviga-
tion area.
The algorithm proceeds iteratively, first searching
for a path in the graph and then selecting the geo-
graphic area near the vertices of the found path. It then
randomly draws n new vertices within this restricted
area to form a new graph. Gradually, the proximity
area becomes smaller, refining the trajectory step by
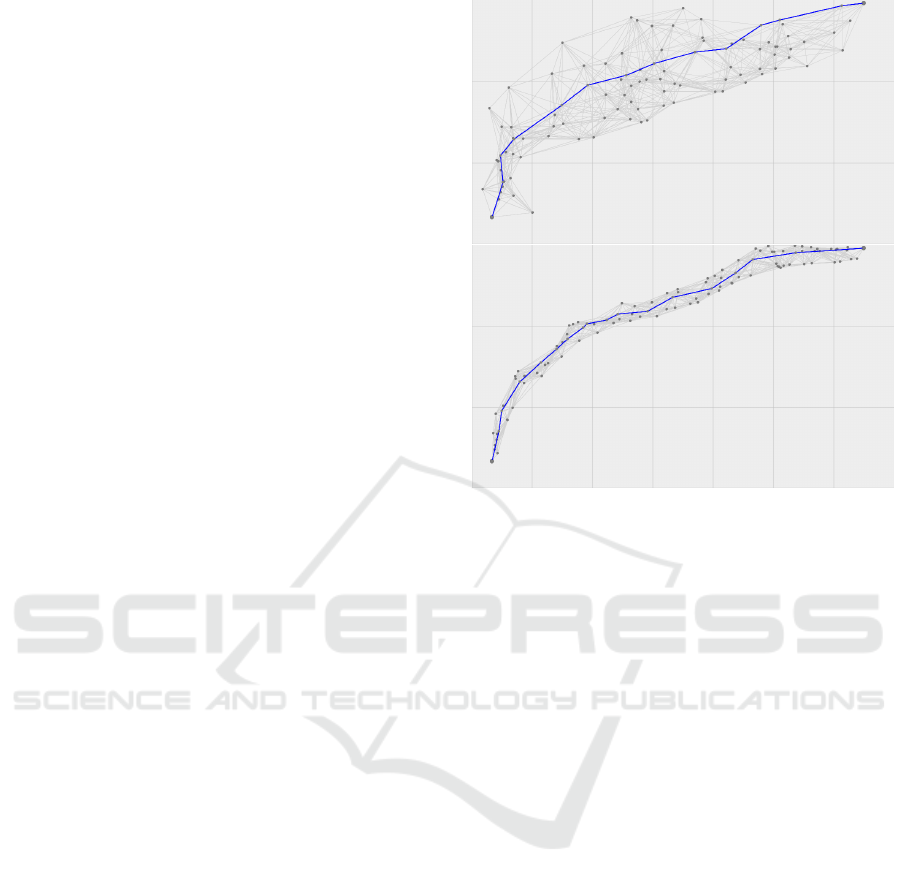
step (see Figure 6). In WRM, an incomplete single-
objective algorithm that minimizes fuel consumption
is used, but nothing prevents the use of another single-
or multi-objective, complete or incomplete procedure.
If a multi-objective procedure is employed, multiple
paths are generated at each iteration, and only one is
selected for the next iteration.
Figure 6: Step n (up) and step n + 1 (down). The geographi-
cal area of the possible locations for step n+1 is determined
by the trajectory found in step n.
3 SEARCH FOR PRECISE AND
DIVERSE ROUTES
We have seen that NAMOA*-TD allows us to obtain
a Pareto front and, therefore, all possible routes corre-
sponding to a given problem instance, but with insuf-
ficient precision in a context of limited computation
time. On the other hand, WRM generates only a single
route but with a high degree of precision. To achieve
both precise and diverse routes in a short amount of
time, we propose the following simple approach:
• The first phase of our method employs a multi-
objective algorithm in a grid (such as NAMOA*-
TD or scalar Dijkstra) to generate a Pareto front
of routes. These routes may be diverse but often
lack precision. To maximize diversity, we select a
small number (around ten among the most distant
costs) of distinct routes from the Pareto front.
• In the second phase, we refine the routes gener-
ated in the first phase using the Weather Routing
Metaheuristic (WRM). By focusing on areas sur-
rounding the initial routes, we progressively im-
prove the precision of the passage points, This
aims to gradually refine a solution to reduce its
costs.
To keep the computation time short, the grid of lo-
cations used by NAMOA*-TD on a rectangular grid
ICORES 2025 - 14th International Conference on Operations Research and Enterprise Systems
82
must have coarser cells than if NAMOA*-TD were
used alone, allowing more time for the rest of the al-
gorithm. This results in even less precise paths than
before, but this is not an issue since they are meant to
be refined immediately afterward.
For the selection of the k paths from the Pareto
front, we rely on the cost vectors and ensure that their
values are as evenly distributed as possible.
Regarding the search for Pareto-optimal paths dur-
ing an iteration of WRM, we will test two algorithms:
• NAMOA*-TD for completeness (at the cost of ex-
ecution time)
• Scalar Dijkstra, with a cost equal to a scalariza-
tion of the different costs, for speed (at the cost of
completeness).
WRM is designed to progressively narrow the area
where the vertices of the next graph may appear, fo-
cusing on the current path. However, in cases where
the current path on the new graph is not better than
the previous one, we allow ourselves to temporarily
expand this area to increase the chances of finding a
better path in the next iteration.
4 EXPERIMENTS
The current and weather data are derived from GRIB
files corresponding to real-world data. The algorithms
were tested over a 10-day weather period, with sev-
eral different routes starting at various times. We used
a 64-bit machine clocked at 2.1 GHz with 192 GB of
RAM for the experiments. So far, we have only con-
sidered two criteria: time and fuel consumption. The
fuel consumption model was provided by a shipping
company and is merely an approximation for a sin-
gle type of its vessels. All tests were conducted us-
ing the same random seed to ensure the reproducibil-
ity of results and provide a fair comparison between
different algorithm configurations. Distances are mea-
sured in degrees, and we assume that the distance of
one degree in meters is constant (ignoring the vari-
ation due to latitude). To determine the search area
around a route using WRM, we set an initial distance
d around the initial route, then multiply this distance
by 0.75 when the solution is improved and by 1.25
when there is no improvement. We limit the process
to 10 iterations. The test results presented here con-
cern a route from Boston to Lisbon on a specific date.
The other results we obtained for different dates and
between different ports do not show qualitative differ-
ences. Figure 7 shows the result of the first part of the
algorithm, which consists of running NAMOA*-TD
on a rectangular grid.
For the second part, WRM once again uses
NAMOA*-TD. Initially, we used a scalar Dijkstra,
which was very fast but did not significantly improve
the results.
The following figures 8, 9, and 10 show the results
of applying WRM with different initial values of d.
In the various tests, we observed that the solu-
tions tend to converge toward local minima that differ
from those found by NAMOA* during the first phase.
Moreover, the more space we allow for divergence
around a solution, the higher the final quality of the
solutions.
We then wanted to verify whether the initial solu-
tion quality is less important than its diversity. To do
this, in the second phase of the algorithm, we replaced
NAMOA*-TD with a scalar Dijkstra.
The results obtained are similar in quality but
much faster.
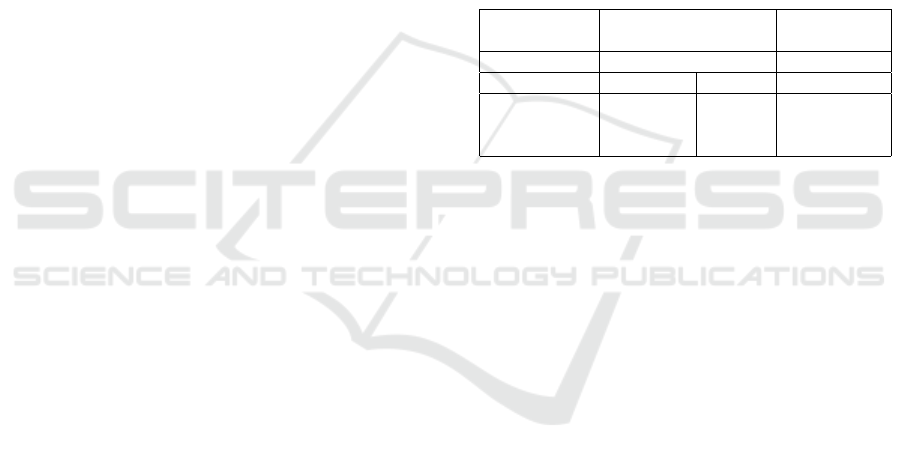
First phase NAMOA* Scalarization
(12 paths) (2 paths)
Time (s) 1610.12 7.743
Second phase NAMOA* Dijkstra Dijkstra
D = 0.5 493.284 17.892 7.112
D = 1.0 1169.74 34.475 8.647
D = 5.0 > 20 min. 565.256 127.749
5 SPEED VARIATION
So far, the approaches we have described assume
constant-speed routes. Allowing speed variation dur-
ing the journey has advantages in terms of optimizing
criteria but presents significant drawbacks in terms of
computation time.
Allowing speed changes at each vertex of the
graph multiplies the number of choices and exponen-
tially increases computation time. However, adjusting
speed during the journey can, for example, allow a
ship to avoid certain geographic areas when weather
conditions are poor. One might plan to slow down to
pass after a storm, then speed up later to make up
for lost time. Conversely, one could speed up to pass
ahead of a storm and then slow down later to conserve
fuel for the remainder of the trip.
5.1 A Naive First Approach
We initially experimented with a naive approach that
extended our previous algorithm by allowing multi-
ple speed choices at each vertex in the graph. As ex-
pected, the computation times became too long: the
few tests conducted with five speed options resulted
in computation times of up to 1 hour and 30 min-
A Ship Routing Algorithm Generating Precise and Diverse Paths
83
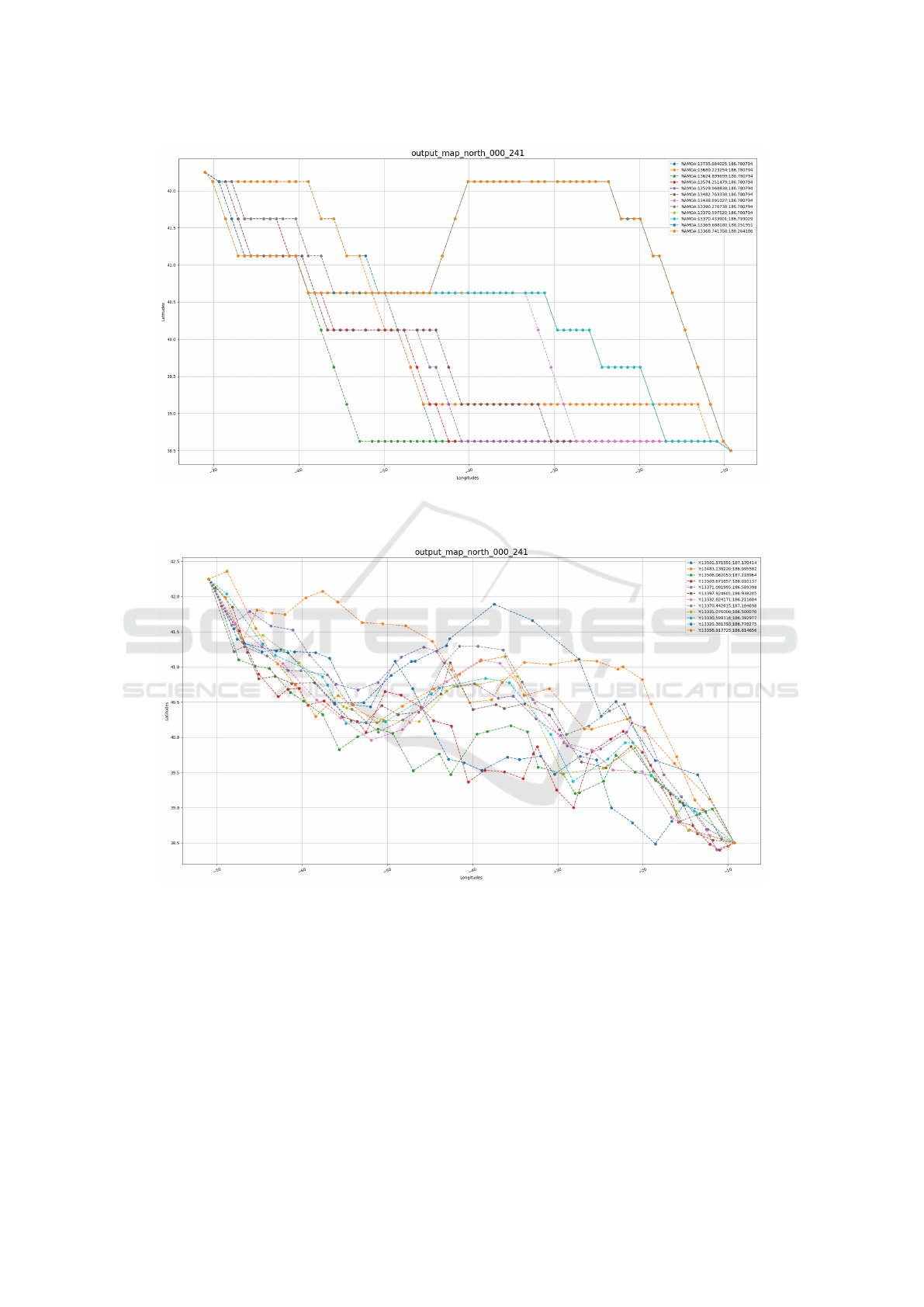
Figure 7: Set of initial solutions found by NAMOA* in a grid of 800 vertices. The pairs of values appearing in the top right
indicate, for each path, its fuel consumption and duration (in hours).
Figure 8: Improvement over 10 iterations of the initial solution with d = 0.5 and 200 vertices.
utes. Even with just three speed choices, the compu-
tation time exceeded 30 minutes. The main reason for
this inefficiency is that the heuristic overestimating
the remaining travel costs provides too broad bounds,
which fails to prune enough routes. Since, even when
traveling slowly at the start, one can speed up later to
make up for lost time, irrelevant paths are developed
much further compared to when speed was constant.
For this reason, we then opted for an incomplete ap-
proach.
5.2 Calculating a Single Speed via
Time/Fuel Consumption Trade-Off
To eliminate the exponential increase in computation
time caused by selecting from multiple speeds at each
vertex, we revisited the idea of scalarization, treating
the cost between two vertices as a linear combination
of time and fuel consumption. This scalarized cost de-
pends on a parameter α, which sets the relative impor-
tance of the two costs. Once α is fixed, we can com-
pute a single cost between two vertices for a given
ICORES 2025 - 14th International Conference on Operations Research and Enterprise Systems
84
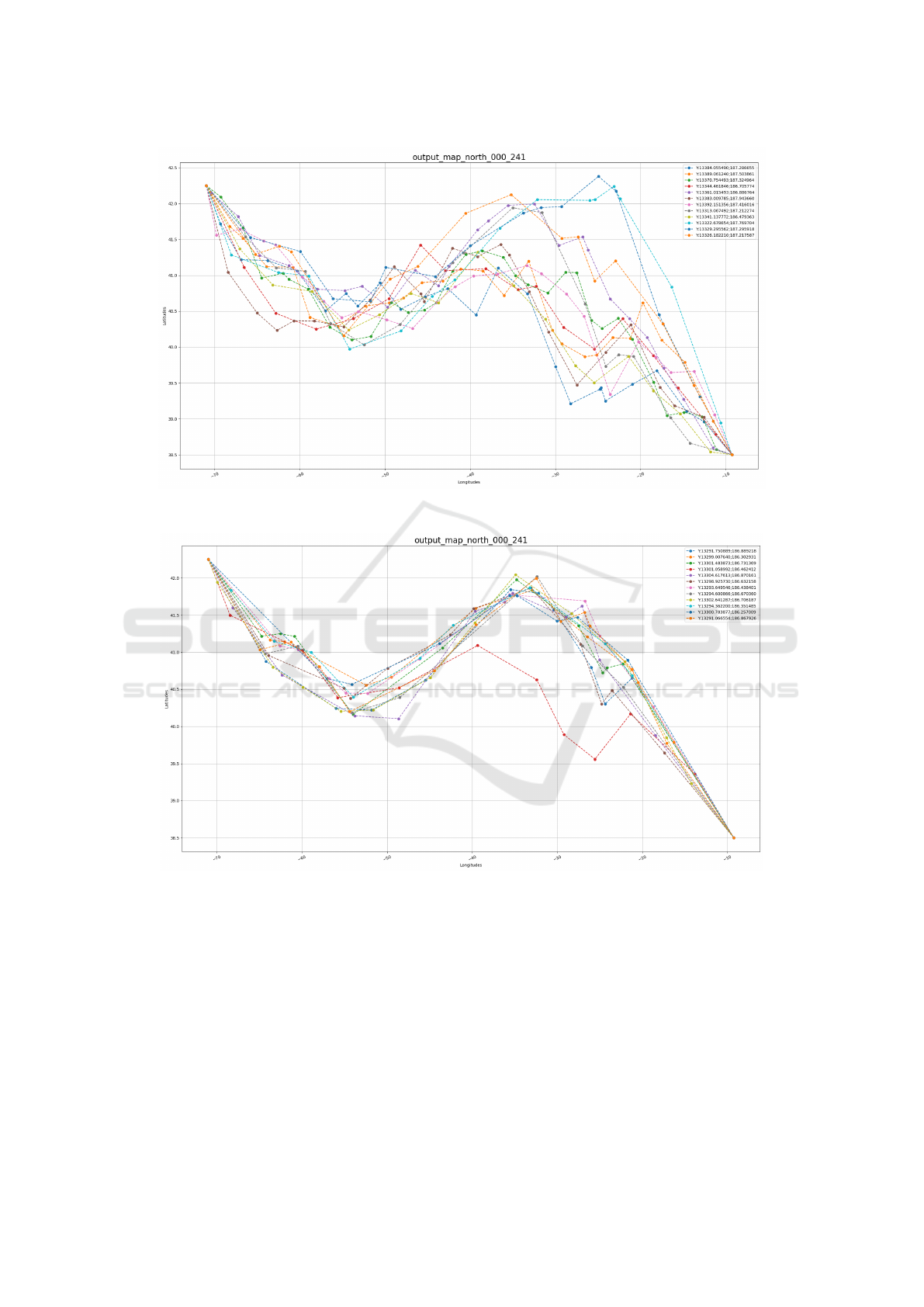
Figure 9: Improvement over 10 iterations of the initial solution with d = 1.0 and 200 vertices.
Figure 10: Improvement over 10 iterations of the initial solution with d = 5.0 and 200 vertices.
speed. The optimal speed is then chosen to minimize
this cost, knowing that this speed may vary depending
on location and time.
Our second approach, therefore, involves running
a scalar Dijkstra algorithm to determine the best route
for a fixed α, calculating the optimal speed at each
new vertex. By rerunning the algorithm with different
values of α, we can offer the user a variety of route
choices.
Experimentally, the results from this approach
were somewhat disappointing. Often, the speed along
the route varies very little and remains close to an
average speed, leading to insignificant improvements
compared to maintaining a constant speed at that av-
erage. The results in terms of both computation time
and the obtained routes were quite similar to those
when the speed was kept constant.
Consequently, we ultimately decided to return to
our constant-speed route calculation algorithm but to
run it multiple times with different constant speed.
This way, we can propose additional routes to the
user, potentially diversifying the options further.
A Ship Routing Algorithm Generating Precise and Diverse Paths
85
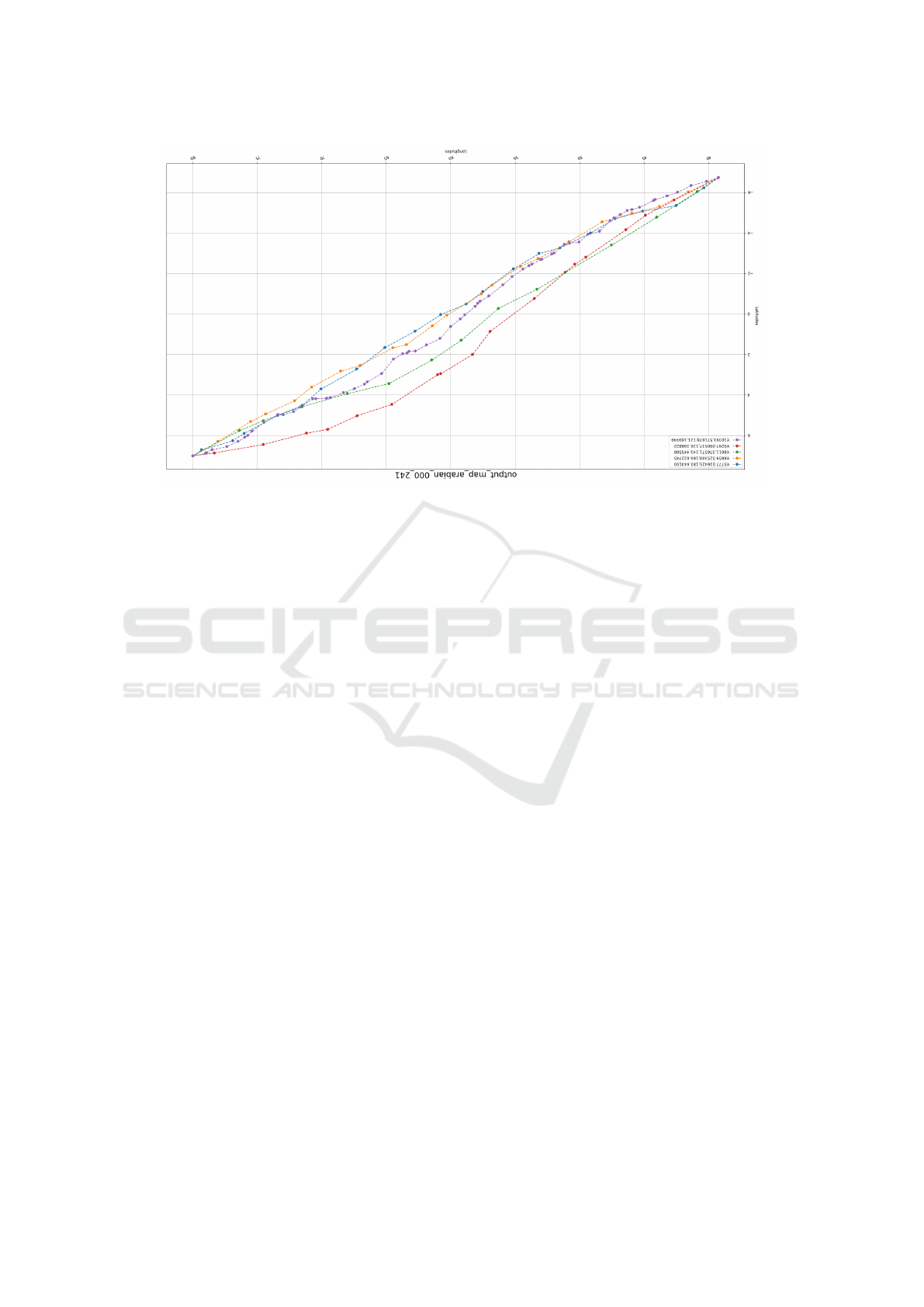
Figure 11: Multiple trajectories with constant speed.
Experimentally, choosing among several constant
speeds has, in some cases, resulted in a diversification
of routes, as illustrated in the example shown in figure
11.
6 CONCLUSION AND FUTURE
WORK
We have proposed a method for generating diverse
and precise maritime routes in a dynamic context
where weather and ocean currents change over time.
Our approach is divided into two phases: the first
generates diverse but imprecise and thus suboptimal
routes, followed by a second phase that refines the
passage points of the routes, improving the objectives
(time and fuel consumption).
From our initial experiments, we observed that for
both phases, a fast but incomplete algorithm (scalar
Dijkstra) was more relevant than a complete one. In-
deed, the computation times were significantly re-
duced, while the quality of the solutions was main-
tained.
Initially, we planned to use an incomplete and
fast algorithm (scalar Dijkstra) to improve the solu-
tions generated by a complete but too slow algorithm
(NAMOA*-TD). However, we realized it was more
effective to quickly generate highly approximate so-
lutions, as the quality of these initial solutions did not
affect the quality of the final ones.
Similarly, allowing speed variation during the
route either proved too computationally expensive or
did not lead to significant variations when scalariz-
ing the costs. However, selecting among multiple con-
stant speeds can diversify routes in terms of the geo-
graphic areas traversed.
The results we obtained, while meeting the preci-
sion and diversification expectations set by the ship-
ping company we collaborated with, still require fur-
ther refinement. Specifically, we need a better fuel
consumption model and to incorporate additional cri-
teria (notably environmental factors). The applicabil-
ity of our approach also depends on real-world con-
straints that we still need to understand in detail: the
maximum time allocated for all calculations and the
computational resources available. These factors will
determine the final precision of the routes our algo-
rithm can produce and, ultimately, its acceptability to
the shipping company.
ACKNOWLEDGMENTS
This work is supported by Bpifrance as part of the PIA
project ”Digital Transformation of Maritime Trans-
port” (TNTM).
REFERENCES
Chauveau, E. (2018). Optimisation des routes maritimes :
un syst
`
eme de r
´
esolution multicrit
`
ere et d
´
ependant du
temps.
Dijkstra, E. W. (1959). A note on two problems in connex-
ion with graphs. Numerische mathematik, 1(1):269–
271.
ICORES 2025 - 14th International Conference on Operations Research and Enterprise Systems
86

Grandcolas, S. (2022). A metaheuristic algorithm for ship
weather routing.
Hart, P. E., Nilsson, N. J., and Raphael, B. (1968). A for-
mal basis for the heuristic determination of minimum
cost paths. IEEE Transactions on Systems Science and
Cybernetics, 4(2):100–107.
Mandow, L. and De La Cruz, J. L. P. (2008). Multiob-
jective a* search with consistent heuristics. J. ACM,
Vol.57(5).
Stewart, B. S. and White, III, C. C. (1991). Multiobjective
a*. J. ACM, Vol.38(4):p.775-814.
Veneti, A., K. C. e. P. G. (2015). Continuous and discrete
time label setting algorithms for the time dependent
bi-criteria shortest path problem. Computing Society
Conference, p.62-73. 8.
A Ship Routing Algorithm Generating Precise and Diverse Paths
87
