
Latent Space Characterization of Autoencoder Variants
Anika Shrivastava
1
, Renu Rameshan
2 a
and Samar Agnihotri
1,2 b
1
School of Computing and EE, IIT Mandi, HP - 175005, India
2
Vehant Technologies Pvt. Ltd., UP - 201301, India
Keywords:
Representation Learning, Autoencoder, Latent Space, Hilbert Space, Matrix Manifold.
Abstract:
Understanding the latent spaces learned by deep learning models is crucial in exploring how they represent
and generate complex data. Autoencoders (AEs) have played a key role in the area of representation learning,
with numerous regularization techniques and training principles developed not only to enhance their ability to
learn compact and robust representations, but also to reveal how different architectures influence the structure
and smoothness of the lower-dimensional non-linear manifold. We strive to characterize the structure of
the latent spaces learned by different autoencoders including convolutional autoencoders (CAEs), denoising
autoencoders (DAEs), and variational autoencoders (VAEs) and how they change with the perturbations in the
input. By characterizing the matrix manifolds corresponding to the latent spaces, we provide an explanation
for the well-known observation that the latent spaces of CAE and DAE form non-smooth manifolds, while
that of VAE forms a smooth manifold. We also map the points of the matrix manifold to a Hilbert space
using distance preserving transforms and provide an alternate view in terms of the subspaces generated in the
Hilbert space as a function of the distortion in the input. The results show that the latent manifolds of CAE
and DAE are stratified with each stratum being a smooth product manifold, while the manifold of VAE is a
smooth product manifold of two symmetric positive definite matrices and a symmetric positive semi-definite
matrix.
1 INTRODUCTION
With the emergence of cutting-edge deep learning
models, the field of image processing has seen sig-
nificant progress. However, this advancement neces-
sitates a deeper understanding of the inner workings
of these models, specifically how they represent data.
Autoencoders, introduced in (Rumelhart et al., 1986),
serve as the foundation for a wide range of unsuper-
vised learning models (Zhai et al., 2018) and have
gained significant attention for their ability to learn
meaningful representations of data. They learn these
representations with the help of a simple end-to-end
structure involving two main components: an encoder
and a decoder. The input y ∈ R
D
is mapped to a
latent representation z ∈ R
d
via an encoding func-
tion f : R
D
→ R
d
, and then the decoder reconstructs
it back in the original space using a decoding func-
tion g : R
d
→ R
D
, minimizing the reconstruction loss
L(y,
ˆ
y), where y is the original input and
ˆ
y is its re-
construction. In essence, the latent space is where z
lies. Characterizing the latent space involves analyz-
a
https://orcid.org/0000-0002-7623-0510
b
https://orcid.org/0000-0003-3038-2479
ing how autoencoders arrange data within this space,
understanding the properties of this space, and assess-
ing whether smooth navigation is possible within the
space. We believe that knowing the structure of the la-
tent space can guide one in designing better restoration
algorithms.
Traditionally, autoencoders are introduced as a di-
mensionality reduction technique, where the latent
space has a dimension d < D, resulting in an under-
complete autoencoder. This dimensionality restric-
tion acts as a form of regularization, forcing the model
to learn only the most important features of y. How-
ever, some variants of autoencoders, known as over-
complete autoencoders, employ latent spaces with di-
mensions equal to or even larger than the input space.
While this design has the potential to capture the clos-
est reconstruction of the input image, it also intro-
duces the risk of the model learning an identity func-
tion (Bengio et al., 2013), where it simply replicates
the input, thus failing to learn any useful representa-
tions. To prevent this, over-complete models are of-
ten combined with regularization techniques such as
weight decay, adding noise to input images (Vincent
et al., 2008), imposing sparsity constraints (Ng et al.,
Shrivastava, A., Rameshan, R. and Agnihotri, S.
Latent Space Characterization of Autoencoder Variants.
DOI: 10.5220/0013123700003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 2: VISAPP, pages
59-67
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
59

2011), or by adding a penalty term to the loss func-
tion to make the space contractive (Rifai et al., 2011).
These regularizations help in structuring the latent
space to be compact and robust against small varia-
tions in the input data, enabling the model to learn ro-
bust and meaningful patterns rather than merely copy-
ing the input. Additionally, some variants introduce
a stochastic component by enforcing a probabilistic
latent space, which ensures smooth latent manifold
leading to better generalization (Kingma and Welling,
2013). In Section 2, we discuss how these regulariza-
tion methods shape the properties of the latent space.
However, while these methods impose some structure
on the latent space, they do not directly explain the
underlying manifold—specifically, its geometry and
properties. Our work aims to bridge this gap by pro-
viding a more detailed understanding of the manifold
structure learned by different autoencoder variants.
We aim to characterize the latent spaces of over-
complete Convolutional autoencoders (CAE), De-
noising autoecnoders (DAE), and Variational au-
toencoders (VAE) by analyzing how varying levels
of noise impact their respective learned latent mani-
folds and whether the structures of these spaces per-
mit smooth movement within them. Empirically, it
is observed that autoencoders exhibit a non-smooth
latent structure (Oring, 2021), while VAEs tend to
have a smooth latent structure (Cristovao et al., 2020).
A simple experiment to visually illustrate this differ-
ence involves interpolating between two data points
by decoding convex combinations of their latent vec-
tors (Berthelot et al., 2018). For CAE and DAE, this
often leads to artifacts or unrelated output, indicating
the lack of smooth transitions between the two points.
In contrast, VAE exhibits a coherent and smooth tran-
sition, reflecting its continuous latent space. Our ap-
proach builds upon the work of (Sharma and Rame-
shan, 2021), where video tensors are modeled as
points on the product manifold (PM) formed by the
Cartesian product of symmetric positive semi-definite
(SPSD) matrix manifolds. We adapt this method for
the encoded tensors extracted from each model’s la-
tent space and examine the ranks of the SPSD matri-
ces to analyze the structure of the learned latent man-
ifold. This analysis provides support for the fact that
the latent spaces of CAE and DAE have non-smooth
structure as those are stratified manifolds with each
stratum being a smooth manifold based on the ranks,
while that of the VAE forms a smooth product mani-
fold of SPD and SPSD matrices. Further, we trans-
form these PM points to the Hilbert space using a
distance based positive-definite kernel (Sharma and
Rameshan, 2021), allowing us to analyze the latent
spaces in terms of subspaces.
Our main contribution is in characterizing the
manifold by using a simple observation namely, the
latent tensors lie on a product manifold of symmet-
ric positive semidefinite matrices. We also explore
how the manifold structure changes with perturba-
tions in the input. Perturbations are modeled by ad-
ditive white Gaussian noise with different variances.
We show that while CAE and DAE have a stratified
matrix manifold, VAE has a matrix manifold that is
smooth.
Organization: The remainder of the paper is struc-
tured as follows. Section 2 provides a brief literature
review. Section 3 discusses the approach used for the
characterization of latent spaces, followed by exper-
imental details in Section 4. Section 5 analyzes the
results obtained and discussed their various implica-
tions. Finally, Section 6 concludes the paper and pro-
vides some directions for the future work.
2 RELATED WORK
Regularization-Guided Latent Spaces. The widely
recognized manifold hypothesis (Fefferman et al.,
2016) suggests that a finite set of high dimen-
sional data points concentrate near or on a lower-
dimensional manifold M . A manifold is basically
a topological space that locally resembles Euclidean
space near each point, and autoencoders are instru-
mental in learning this underlying latent manifold.
Several autoencoder variants employ regularization
techniques to enhance the robustness and structure
of the underlying latent manifold. (Vincent et al.,
2008) introduce Denoising autoencoders (DAEs), a
modification to the traditional autoencoders where
the model learns to reconstruct clean images ˆy from
noisy/corrupted inputs ˜y, thereby, minimizing the re-
construction loss L (y, ˆy). From a manifold learning
perspective, the latent space of DAEs identifies the
lower dimensional manifold where the clean data re-
sides and DAEs learn to map the corrupted data back
onto this manifold. This enables the model to gen-
eralize better, capturing essential latent representa-
tions while being robust to noise. Based on a simi-
lar motive of learning the lower-dimensional manifold
and robust latent representations (Rifai et al., 2011)
add a contractive penalty to the learning process.
Unlike traditional autoencoders, contractive autoen-
coders apply a regularization term to the encoder’s
Jacobian matrix, penalizing the sensitivity of the la-
tent space to small input changes. In other words,
the underlying latent manifold becomes locally in-
variant to small variations in the input and contracts
the latent space along these directions of unimportant
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
60
C
output
input
Skip-connected Triple convolution (SCTC)
Convolution layers with
same no. of filters
Input
image
+
Latent
tensor
3
256
output
image
128
32 64
128
7x7x256
7x7x128
128 64
32
Feature extraction Reconstruction
SCTC block with
Conv layers
Maxpool layer Feature maps
Single Conv layer
SCTC block with
Conv transpose
layers
C
Concatenate
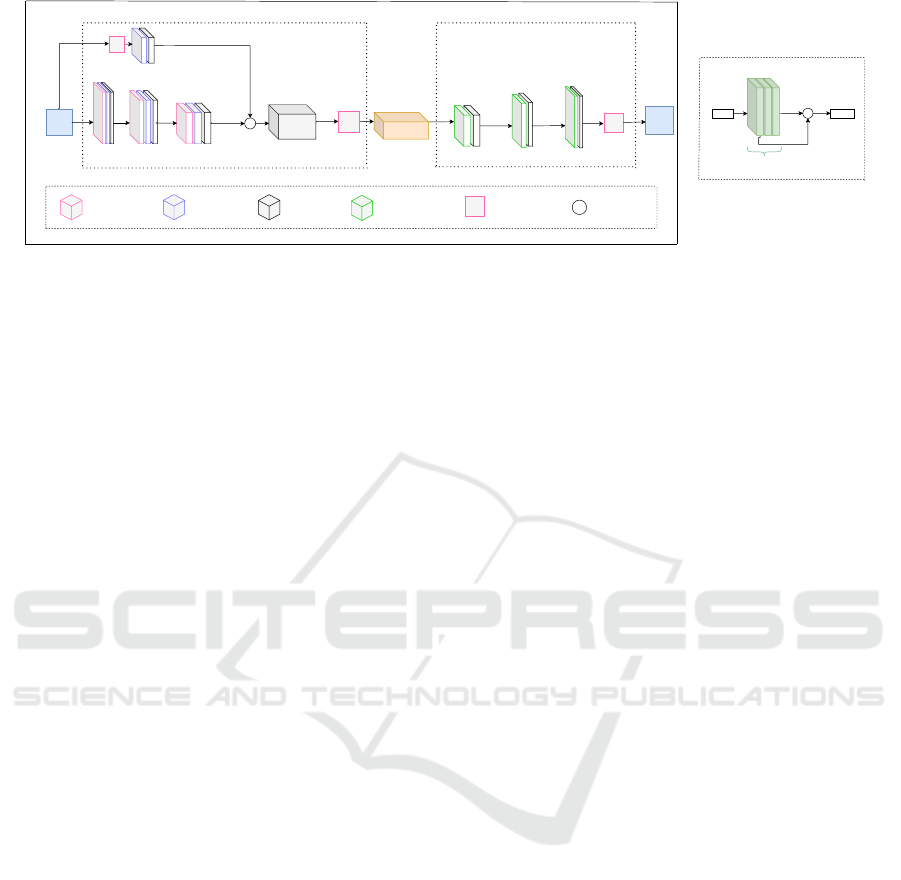
Figure 1: The SCTC block used in CAE and DAE models.
variations. Similarly, sparse autoencoders (Ng et al.,
2011) learn non-redundant representations by enforc-
ing sparsity in the hidden units. By activating only
a few neurons at a time, the model captures more
distinct, disentangled features, resulting in a sparse,
interpretable and efficient latent space. In addition
to these techniques, Variational autoencoders (VAEs)
(Doersch, 2016) introduce a probabilistic structure to
the latent space by learning a distribution over the la-
tent variables, rather than representing them as fixed
points. This pushes the latent space toward being con-
tinuous and smooth, facilitating tasks like data gener-
ation and interpolation.
Representation Geometry. Several studies explore
and regularize the geometry of the latent represen-
tation in VAEs. For instance, (Chadebec and Allas-
sonnière, 2022) show that the latent manifold learned
by VAEs can be modeled as a Riemannian manifold,
while (Chen et al., 2020) extend the VAE framework
to learn flat latent manifolds by regularizing the met-
ric tensor to be a scaled identity matrix. (Connor
et al., 2021) incorporate a learnable manifold model
into the latent space to bring the prior distribution
closer to the true data manifold. Additionally, (Leeb
et al., 2022) develop tools to exploit the locally con-
tractive behaviour of VAEs to better understand the
learned manifold. These and many other studies as-
sume that VAEs learn a smooth manifold, whereas
AEs learn a non-smooth manifold (Oring, 2021), but
the exact structure and properties of these manifolds
have not been thoroughly explored.
We aim to capture the precise structure of the la-
tent space and how it evolves when processing images
with varying levels of noise. Our results confirm that
the latent manifolds learned by AEs are non-smooth,
while the manifold learned by VAEs is smooth - ex-
plaining the reasons behind this behavior and char-
acterizing the space in detail. Many studies have
demonstrated the effectiveness of modeling sample
data as points in the product manifold across various
vision tasks (Abdelkader et al., 2011; Lui et al., 2010;
Lui, 2012; Sharma and Rameshan, 2019). Motivated
by this, we strive to thoroughly model the latent space
points in the PM of the SPSD matrices to characterize
the behaviour of latent spaces of different models.
3 PRODUCT MANIFOLD
STRUCTURE
In this section, we describe the details of the au-
toencoder network used for feature extraction and the
method we adopt for modeling the encoded latent ten-
sors as points in the PM of SPSD matrices, and for
further transforming PM points to the Hilbert space.
3.1 Model Architectures
The architecture used for extracting latent tensors
in both CAE and DAE models is built of "Skip-
Connected Triple Convolution” (SCTC) block as
shown in Fig. 1. Each SCTC block contains three
convolutional layers with the same number of filters
and a skip connection from the first convolution to the
third convolution. The encoder is composed of three
such layers, each followed by max-pooling. Addi-
tionally, a skip connection is introduced directly from
the input image to the latent representation using a
single convolutional and max-pooling layer. The de-
coder mirrors the encoder’s structure, using the SCTC
blocks with transpose convolution layers to recon-
struct the images from the latent tensor. We select the
SCTC blocks after extensive experimentation. To as-
sess the impact of the SCTC blocks, we replace them
with standard convolution layers, which result in re-
duced PSNR, confirming their importance in preserv-
ing image details. Additionally, removing the direct
skip connection from the input to the latent tensor
again leads to a drop in PSNR, underscoring its role
in better feature retention.
For VAEs, we use a standard convolutional VAE
architecture. However, instead of using linear layers
Latent Space Characterization of Autoencoder Variants
61
Encoder
Input
images
Encoded latent tensor
for each image
n
3
n
1
n
2
n
2
n
3
n
1
n
3
n
1
n
2
n
1
n
2
n
3
n
2
n
3
n
1
n
3
n
1
n
2
Latent tensor
decomposition
Each encoded
latent tensor
n
2
n
2
n
1
n
1
n
3
n
3
x
x
Matrix unfolding
operation
Product of
SPSD matrices
Product Manifold
k
Hilbert Space
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
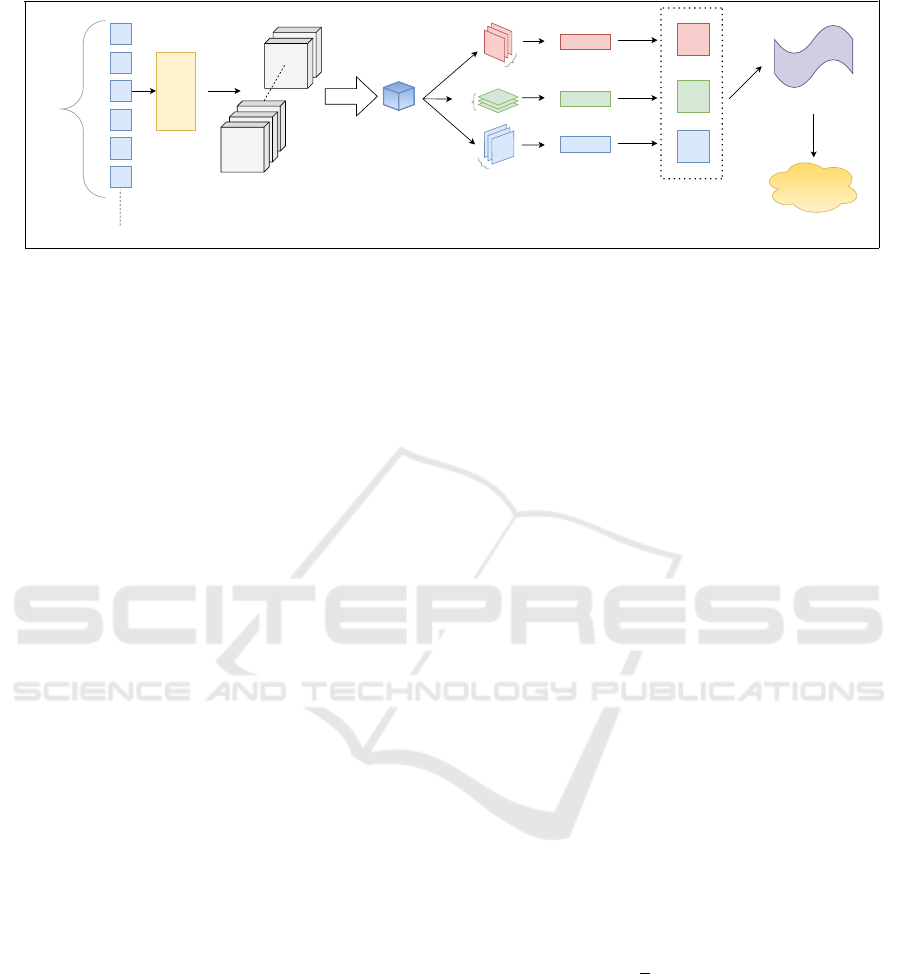
Figure 2: Pipeline of the proposed approach.
to compute the mean (µ) and log variance, we employ
convolution layers to generate a latent tensor instead
of a latent vector. Through experimentation, we con-
firm that both latent vectors and latent tensors yield
similar reconstruction output. Based on this, we opt
for latent tensors to maintain consistency, with the
shape of the extracted latent tensor fixed at 7×7×128
for all models to ensure fair comparison.
3.2 Latent Tensors as Points in a
Product Manifold
The encoded latent tensors can be understood as
points lying on a PM of the SPSD matrices. An il-
lustration of the pipeline used for representing en-
coded latent tensors as points in the PM of the SPSD
matrices is shown in Fig. 2 (inspired by (Sharma
and Rameshan, 2021)). Let the encoded feature ten-
sors have the shape (N, n
1
, n
2
, n
3
), where N repre-
sents the number of test samples. Each feature tensor
can be interpreted as a point F ∈ R
n
1
×n
2
×n
3
, with n
1
,
n
2
and n
3
corresponding to height, width, and num-
ber of channels of the encoded image, respectively.
These tensors are then decomposed into a set of three
matrices F 7→ {F
(1)
, F
(2)
, F
(3)
}, using matrix unfold-
ing, where F
(1)
∈ R
n
1
×(n
2
·n
3
)
, F
(2)
∈ R
n
2
×(n
3
·n
1
)
, and
F
(3)
∈ R
n
3
×(n
1
·n
2
)
. For each F
(i)
, a covariance matrix
is calculated denoted as S
(1)
, S
(2)
, S
(3)
and these are
inherently the SPSD matrices. The Cartesian product
of these covariance matrices is a product manifold of
the SPSD manifolds (Rodolà et al., 2019).
By definition, the SPSD manifold S
n
+
(r)
(Bonnabel and Sepulchre, 2010) is the space of
n × n SPSD matrices of fixed rank r. The SPSD
matrices sharing the same rank belong to the same
manifold. The collection of all n × n SPSD matrices
with rank ≤ r is not a manifold. It is well known
that the collection of all n × n SPSD matrices with
varying ranks, forms a stratified manifold (Massart
et al., 2019). The ranks r
1
, r
2
, r
3
of the matrices
S
(1)
, S
(2)
, S
(3)
, respectively, form a tuple (r
1
, r
2
, r
3
),
characterizing the overall rank configuration of the
latent tensor within the PM. We show in Section 5
that the way this rank tuple behaves with varying
noise levels is different for the three architectures.
The variability in these ranks indicate whether the
underlying manifold is smooth or stratified.
3.3 Transformation to Hilbert Space
To simplify the understanding, instead of viewing the
latent representation as a tensor in the SPSD mani-
fold, we adopt an alternative approach by embedding
these points into a Hilbert space. Each covariance de-
scriptor S
(i)
is regularized to a fixed rank r
i
by replac-
ing zero eigenvalues with small epsilon value, where
r
i
corresponds to the maximum rank observed across
all test samples for each i ∈ {1, 2, 3}. The decomposi-
tion of each S
(i)
is given as (Bonnabel and Sepulchre,
2010):
S
(i)
= A
(i)
A
(i)⊤
= (U
(i)
R
(i)
)(U
(i)
R
(i)
)
⊤
=U
(i)
R
(i)2
U
(i)⊤
,
for i ∈ {1, 2, 3} corresponding to each unfolding.
Here, U ∈ R
n×r
has orthonormal columns; n is the
size of S and r its rank. R is an SPD matrix of
size r. Following (Sharma and Rameshan, 2021), the
geodesic distance function between any two points
γ
1
, γ
2
on the PM of the SPSD matrices is defined as:
d
2
g
(γ
1
, γ
2
) =
3
∑
i=1
1
2
∥U
(i)
1
U
(i)T
1
−U
(i)
2
U
(i)T
2
∥
2
F
+λ
(i)
∥log(R
(i)
1
) − log(R
(i)
2
)∥
2
F
!
.
(1)
For further analysis, we use the positive definite
linear kernel function that follows from Eq. 1:
k
lin
(γ
1
, γ
2
) =
3
∑
i=1
w
i
∥U
(i)T
1
U
(i)
2
∥
2
F
+λ
(i)
tr
log(R
(i)
1
)log(R
(i)
2
)
!
,
(2)
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
62

where w
i
denotes the weight for each factor manifold
and tr denotes trace of a matrix. The transformation
from the PM to the Hilbert space is achieved using
this distance based positive definite kernel function.
It has been shown in (Sharma and Rameshan, 2021)
that such a kernel ensures that the distances between
points in the manifold are maintained in the Hilbert
space after the transformation.
Using the kernel in Eq. 2, we can obtain virtual
features (VF) for each of the data tensor as described
in (Zhang et al., 2012). If there are N data points, then
the virtual feature is a length N vector obtained from
the kernel gram matrix (K) and its diagonalization.
Following the observation that not all the eigenvalues
of K are significant, we do a dimensionality reduction
and map the manifold points to a lower dimensional
subspace of R
N
. In Section 5, we demonstrate how
the dimensionality of the space changes with varying
noise levels for the three autoencoder variants.
4 EXPERIMENTAL SETUP
Training Data. We train our models on the MNIST
dataset. The CAE and VAE models are trained us-
ing 60,000 clean images, while the DAE is trained on
a noisy version of the dataset, with Gaussian noise
(sigma = 0.05) added to the training images.
Testing Data. To effectively capture the changes in
structure of the underlying latent manifold for each
model, we construct a comprehensive test dataset
from the MNIST test set. This dataset includes
multiple classes, each containing 300 images. The
first class contains clean images, while the subse-
quent classes are progressively corrupted with Gaus-
sian white noise, with the variance increasing in in-
crements of 0.01.
Training Loss. For the CAE and DAE, we employ
a custom loss function that combines the weighted
sum of MSE and SSIM losses, with equal weights.
For the VAE, we train it using the MSE reconstruc-
tion loss along with the Kullback–Leibler Divergence
loss, where the KLD term is weighted by a parameter
β = 0.8.
5 RESULTS AND ANALYSIS
Empirical observations in the existing literature show
that autoencoders like CAEs and DAEs tend to exhibit
a non-smooth latent structure, while VAEs are known
for producing a smooth latent structure. We aim to
explain this widely discussed hypothesis by explor-
ing what these manifolds exactly are and motivate our
findings from different perspectives.
5.1 Latent Space Structure in Manifold
Space
In our first experiment, we use the Berkeley segmen-
tation dataset (BSDS) to train the CAE and DAE mod-
els. The latent tensor corresponding to each image
in the test dataset is modeled as a point on the PM
formed of the SPSD matrices, as described in subsec-
tion 3.2. S
(1)
, S
(2)
, S
(3)
have shapes 32 × 32, 32 × 32
and 128 × 128, respectively, corresponding to each
unrolled matrix. The ranks of these SPSD matri-
ces are then calculated across different noise levels.
The rank configuration (r
1
, r
2
, r
3
) decides the product
manifold in which the latent tensor lies. It is observed
that all the latent tensors do not lie on the same prod-
uct manifold in the case of CAE and DAE. For clean
images and at lower noise levels, the latent tensors
are distributed across different strata of the product
manifold whereas at higher noise levels they tend to
lie on fewer strata. For a fair comparison between
the three models, we switch to the MNIST data as all
three models present a similar reconstruction perfor-
mance on this dataset. The CAE and DAE exhibit a
behaviour similar to that for the BSDS. Contrary to
this behaviour, the latent tensors of the VAE lie in
the same product manifold for clean as well as for
noisy cases at all noise variances. The rank variablilty
across the three models is given in Fig. 3. The ranks
of the three SPSD matrices for varying noise are pre-
sented in Table 1. These ranks are reported as ranges
(min, max) for each case to reflect the observed vari-
ability across the dataset. We observe that the ranks
of the SPSD matrices, mostly S
(3)
, for CAE and DAE
vary across different noise levels, while for VAE, the
corresponding ranks remain fixed.
The variability in the ranks of the SPSD matri-
ces observed in CAE and DAE results in a stratified
manifold. Since each SPSD matrix lies on a specific
SPSD manifold defined by its rank, the latent spaces
of the CAE and DAE span multiple product manifolds
determined by the tuple (r
1
, r
2
, r
3
) creating stratifica-
tion of space (Takatsu, 2011). In contrast, the VAE
shows consistent ranks across all noise levels for the
three covariance matrices, indicating that all tensors
lie on the same product manifold - product of two
SPD manifolds and an SPSD manifold. This consis-
tency results in smooth movement within the latent
space from one point to another, describing the latent
space of the VAE as a smooth product manifold.
Latent Space Characterization of Autoencoder Variants
63

Figure 3: Histograms of ranks of S
(1)
, S
(2)
, S
(3)
for the three models on 300 test samples. Left side is for clean and right for
noisy with standard deviation 0.1. From top to bottom: CAE, DAE, VAE.
Table 1: Ranks of unrolled covariance matrices across different noise level for CAE, DAE, and VAE.
Noise
levels
CAE (latent shape: 7x7x128) DAE (latent shape: 7x7x128) VAE (latent shape: 7x7x128)
zero S1: (5, 7), S2: (6, 7), S3: (29, 48) S1: (6, 7), S2: (6, 7), S3: (29, 48) S1: (7, 7), S2: (7, 7), S3: (48, 48)
0.01 S1: (6, 7), S2: (7, 7), S3: (30, 48) S1: (7, 7), S2: (6, 7), S3: (42, 48) S1: (7, 7), S2: (7, 7), S3: (48, 48)
0.02 S1: (5, 7), S2: (7, 7), S3: (30, 48) S1: (6, 7), S2: (7, 7), S3: (42, 48) S1: (7, 7), S2: (7, 7), S3: (48, 48)
0.03 S1: (6, 7), S2: (7, 7), S3: (32, 48) S1: (6, 7), S2: (7, 7), S3: (42, 48) S1: (7, 7), S2: (7, 7), S3: (48, 48)
0.04 S1: (6, 7), S2: (7, 7), S3: (32, 48) S1: (7, 7), S2: (7, 7), S3: (43, 48) S1: (7, 7), S2: (7, 7), S3: (48, 48)
0.05 S1: (6, 7), S2: (7, 7), S3: (31, 48) S1: (7, 7), S2: (7, 7), S3: (44, 48) S1: (7, 7), S2: (7, 7), S3: (48, 48)
0.06 S1: (7, 7), S2: (7, 7), S3: (31, 48) S1: (7, 7), S2: (7, 7), S3: (43, 48) S1: (7, 7), S2: (7, 7), S3: (48, 48)
0.07 S1: (7, 7), S2: (7, 7), S3: (32, 48) S1: (7, 7), S2: (7, 7), S3: (45, 48) S1: (7, 7), S2: (7, 7), S3: (48, 48)
0.08 S1: (7, 7), S2: (7, 7), S3: (33, 48) S1: (7, 7), S2: (7, 7), S3: (46, 48) S1: (7, 7), S2: (7, 7), S3: (48, 48)
0.09 S1: (7, 7), S2: (7, 7), S3: (33, 48) S1: (7, 7), S2: (7, 7), S3: (47, 48) S1: (7, 7), S2: (7, 7), S3: (48, 48)
0.1 S1: (7, 7), S2: (7, 7), S3: (34, 48) S1: (7, 7), S2: (7, 7), S3: (47, 48) S1: (7, 7), S2: (7, 7), S3: (48, 48)
5.2 Latent Space Structure in Hilbert
Space
The stratified structure observed in CAE and DAE
can be difficult to visualize directly within the prod-
uct manifold space. Therefore, we transform the PM
points into Hilbert space, as detailed in subsection 3.3.
This is justified as the distance between the points
are preserved in both the spaces as shown in (Sharma
and Rameshan, 2021). For a test dataset with N data
points, an N ×N kernel-gram matrix is generated. We
proceed by calculating virtual features, followed by
dimensionality reduction to derive N-length vectors
lying on a d-dimensional subspace of R
N
. The dimen-
sion d for each noise level is determined by minimiz-
ing the difference between the original kernel-gram
matrix and its rank-i approximations and selecting the
smallest i such that the norm falls below a certain
threshold. Fig. 4 illustrates the change in d with noise
levels.
Rather than dealing with multiple product mani-
folds that arise for CAE and DAE, we use a regular-
izer - adding a small value to all the zero eigenvalues
of the SPSD matrices - and push all the points to lie on
a single product manifold. While it may seem that this
simplification destroys the structure, our results show
that the rank variability gets reflected as variability of
subspace dimension in the Hilbert space.
We observe that for the CAE and DAE, the di-
mensionality of subspaces decreases as the input tran-
sitions from clean to noisy, indicating that the sub-
spaces in the Hilbert space change with increasing
noise. The CAE experiences a sharper drop in dimen-
sionality, while the DAE preserves it slightly better.
In contrast, the VAE points lie in the same subspace
regardless of the noise level.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
64
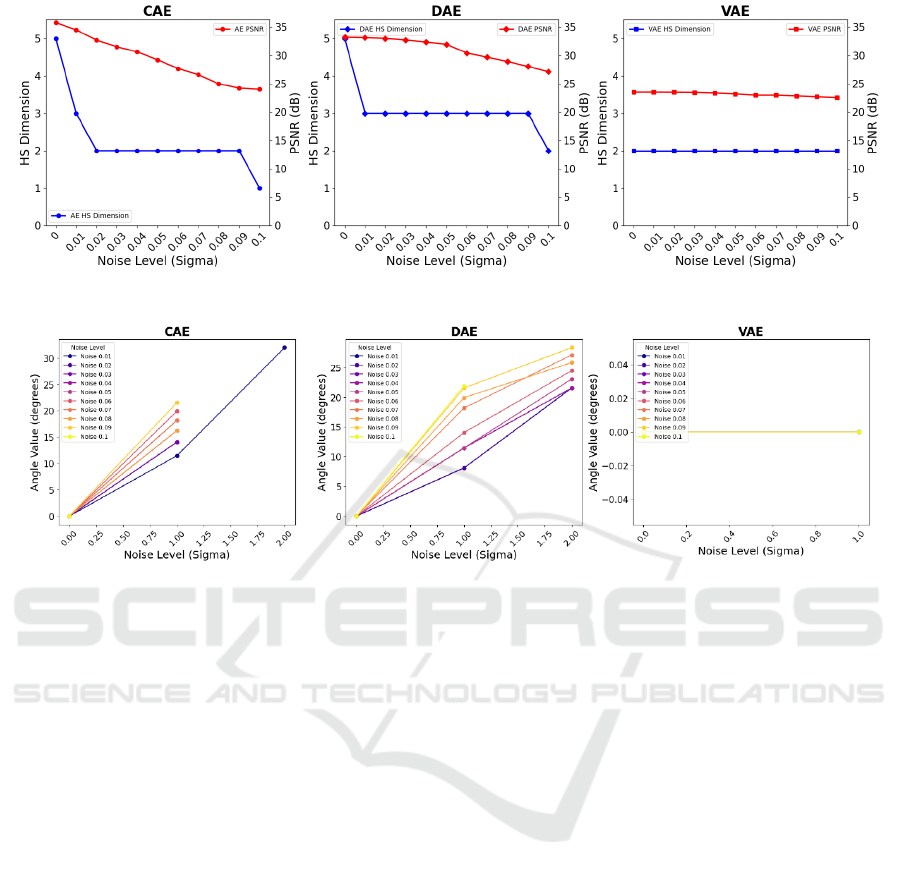
Figure 4: The Hilbert space dimensionality and PSNR versus noise level for CAE, DAE, and VAE.
Figure 5: Principal angle variations for CAE, DAE, VAE.
With noisy subspace dimensions differing from
those of the clean subspace, we have so far estab-
lished that CAE and DAE points lie on distinct sub-
spaces for noisy cases. To examine how the subspaces
corresponding to noisy inputs are oriented with re-
spect to the clean ones, we calculate the principal
angles (Knyazev and Zhu, 2012) between noisy and
clean subspaces at each noise level. Given two sub-
spaces X and X
′
with dimensions d and d
′
, respec-
tively, the number of principal angles is determined by
m = min(d, d
′
). The results, presented in Fig.5, show
that for the CAE and DAE, the principal angles in-
crease with noise level, suggesting that the noisy sub-
spaces diverge away from the clean ones with noise.
This divergence is more pronounced in the CAE. In
contrast, the VAE shows zero principal angles as ex-
pected.
We also examine how PSNR behaves across dif-
ferent noise levels (Fig. 4). It is observed that as
the subspace dimension decreases, the PSNR tends
to drop, particularly in CAE and DAE, whereas VAE
maintains both constant dimensionality and consistent
PSNR across all noise levels, suggesting a connection
between the two.
5.3 Visualizing the Latent Tensors
To provide a clear visual representation of the learned
latent tensors for the three models across different
noise levels, we used t-distributed Stochastic Neigh-
bor Embedding (t-SNE) (Van der Maaten and Hin-
ton, 2008) of the latent tensors extracted from each
model. The t-SNE is a dimensionality reduction tech-
nique that projects high-dimensional data into a two-
dimensional Euclidean space, enabling easier visual
comparison of latent spaces and complementing the
more abstract analysis in the Hilbert space. Fig. 6
shows the t-SNE plots of the flattened latent tensors
for each model across different noise levels, with each
color representing a different noise level and blue dots
denoting the clean images.
We observe that as noise increases, the latent ten-
sors for CAE and DAE diverge further from the clean
points, thus confirming our earlier observation from
the Hilbert space analysis, where the principal angles
between noisy and clean subspaces consistently in-
creased with higher noise levels. In DAE, the diver-
gence is more gradual compared to CAE. In contrast,
for VAE, the t-SNE coordinate range shows that the
divergence between clean and noisy points is quite
small, with both clean and noisy representations re-
maining within a single, tightly clustered region cen-
Latent Space Characterization of Autoencoder Variants
65
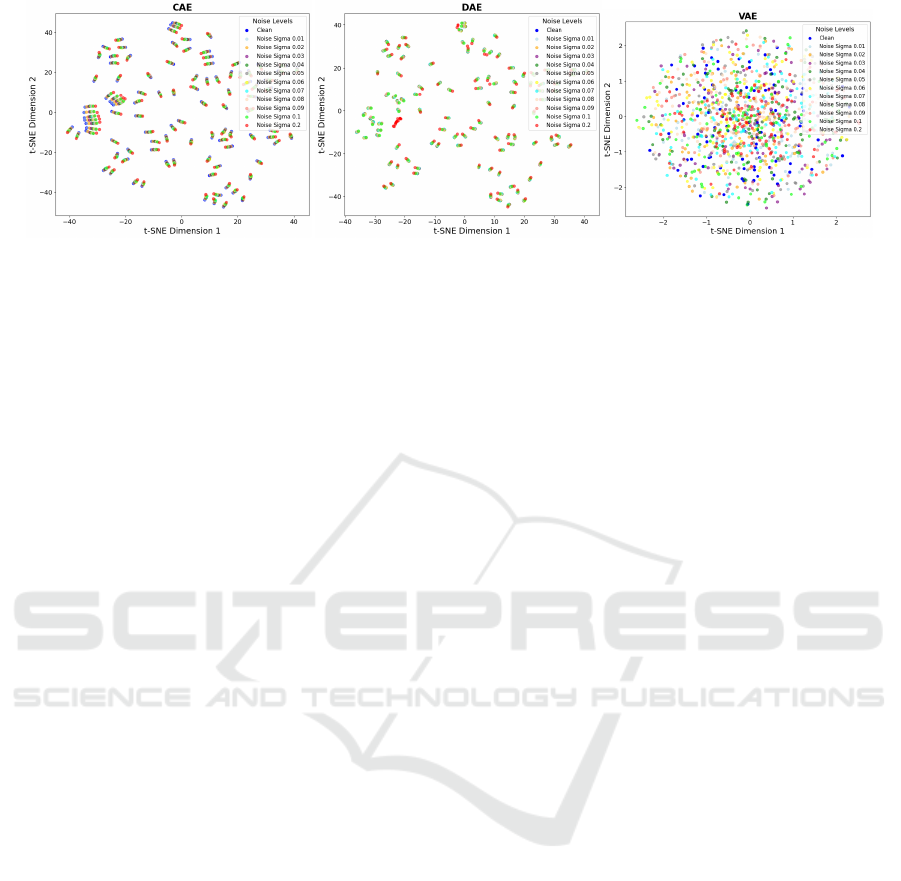
Figure 6: t-SNE plot of latent tensors for CAE, DAE, VAE.
tered around the origin. These observations reinforce
the behaviour that we observe in both the manifold
and Hilbert space analyses.
5.4 Discussion
In this subsection, we discuss the implications of the
observations from the results discussed earlier in this
section, focusing on their relevance to the denoising
application from the latent space perspective.
It is observed that the CAE and DAE have a latent
space which is a stratified manifold. While moving
within a stratum is smooth, transitioning across strata
is not so due to the dimensionality differences among
the strata. It is interesting to note that with increasing
noise, the manifold becomes a smooth SPD manifold
and moving from this higher rank manifold of SPD
matrices to the lower rank manifold of SPSD matrices
is easier as it only involves thresholding of the smaller
eigenvalues. This observation points to a possibility
of using both the autoencoders for denoising.
For VAEs, as outlined in (Lee and Lee, 2012, Ex-
ample 1.34), the Cartesian product of manifolds is
a smooth product manifold if each component man-
ifold is smooth. Since both SPD and SPSD (of fixed
rank) are smooth manifolds, the latent space of the
VAE can be described as a smooth product manifold.
This smooth manifold structure may lead to far sim-
pler denoising algorithms than those with the CAEs
and DAEs. Our primary contribution lies in character-
izing the latent manifold as a product manifold of the
SPD/SPSD matrices, where the core distinction be-
tween smooth and non-smooth manifolds is rooted in
the structure of this product manifold. The CAE and
DAE form stratified product manifolds due to rank
variability of their respective SPSD matrices, leading
to discontinuities and non-smooth transitions across
strata. On the other hand, the VAE, with its uniform
rank structure, results in a smooth product manifold.
The Hilbert space analysis for the three autoen-
coders reveals the following structure. For the CAE
and DAE, the subspace representing noisy data ro-
tates away from that of clean data and has a lower di-
mension. Whereas, for the VAE, the noisy and clean
data points are transformed to latent space points that
can be mapped to the same Hilbert space. The t-SNE
plots also reflect these distinct structural differences
in latent spaces of the three autoencoders. The t-SNE
plot of VAE feature-points appear as a coherent ball
despite varying noise levels. Contrary to this, these
points are seen as elongated points in the t-SNE plot
for the CAE. The DAE, being midway between these
two, has more tightly clustered points.
All the three analysis methods provide strong and
concurring evidence for the smoothness of the latent
space of VAE and the non-smooth structure of latent
space of CAE and DAE.
6 CONCLUSION AND FUTURE
WORK
We characterize the latent spaces of different autoen-
coder models, specifically CAEs, DAEs and VAEs,
to gain an understanding of their respective smooth-
ness properties. For this, we explore the latent space
in two domains: the manifold space and the Hilbert
space. In the manifold space, with the help of a sim-
ple observation that the latent tensors lie on a prod-
uct manifold of the SPSD matrices, we observe the
variability in ranks of the SPSD matrices in the CAE
and DAE that result in a stratified structure, where
each stratum is smooth but the overall structure is
non-smooth due to discontinuities among strata. In
contrast, the VAE shows consistent ranks, forming
a smooth product manifold. In the Hilbert space,
varying dimensions and increasing principal angles
between clean and noisy subspaces in the CAE and
DAE suggest distinct subspaces for clean and noisy
data, while the VAE maintains the subspace with the
same dimensionality for both, with zero principal an-
gles. We also note a close relationship between sub-
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
66

space dimensionality and reconstruction performance
across models. These results are corroborated by the
t-SNE plots where significant divergence is observed
between clean and noisy points in the CAE and DAE,
while such points for the VAE are tightly clustered
near the origin.
Much work remains to be done. We plan to extend
this analysis to other autoencoder variants and vali-
date the results with more datasets. Further, we also
plan to characterize the latent spaces of other genera-
tive models. As a constructive next step, we intend to
devise denoising and deblurring algorithms by lever-
aging the understanding of the manifold structure of
autoencoders, particularly VAEs.
REFERENCES
Abdelkader, M. F., Abd-Almageed, W., Srivastava, A., and
Chellappa, R. (2011). Silhouette-based gesture and
action recognition via modeling trajectories on Rie-
mannian shape manifolds. Computer Vision and Im-
age Understanding, 115(3):439–455.
Bengio, Y., Courville, A., and Vincent, P. (2013). Represen-
tation learning: A review and new perspectives. IEEE
Trans. on Pattern Analysis and Machine Intelligence,
35(8):1798–1828.
Berthelot, D., Raffel, C., Roy, A., and Goodfellow, I.
(2018). Understanding and improving interpola-
tion in autoencoders via an adversarial regularizer.
arXiv:1807.07543.
Bonnabel, S. and Sepulchre, R. (2010). Riemannian metric
and geometric mean for positive semidefinite matrices
of fixed rank. SIAM Journal on Matrix Analysis and
Applications, 31(3):1055–1070.
Chadebec, C. and Allassonnière, S. (2022). A geomet-
ric perspective on variational autoencoders. Advances
in Neural Information Processing Systems, 35:19618–
19630.
Chen, N., Klushyn, A., Ferroni, F., Bayer, J., and Van
Der Smagt, P. (2020). Learning flat latent manifolds
with VAEs. arXiv:2002.04881.
Connor, M., Canal, G., and Rozell, C. (Apr. 2021). Vari-
ational autoencoder with learned latent structure. In
Proc. AISTATS, Online.
Cristovao, P., Nakada, H., Tanimura, Y., and Asoh,
H. (2020). Generating in-between images through
learned latent space representation using variational
autoencoders. IEEE Access, 8:149456–149467.
Doersch, C. (2016). Tutorial on variational autoencoders.
arXiv:1606.05908.
Fefferman, C., Mitter, S., and Narayanan, H. (2016). Test-
ing the manifold hypothesis. Journal of the American
Mathematical Society, 29(4):983–1049.
Kingma, D. P. and Welling, M. (2013). Auto-encoding vari-
ational Bayes. arXiv:1312.6114.
Knyazev, A. V. and Zhu, P. (2012). Principal angles between
subspaces and their tangents. arXiv:1209.0523.
Lee, J. M. and Lee, J. M. (2012). Smooth manifolds.
Springer.
Leeb, F., Bauer, S., Besserve, M., and Schölkopf, B. (2022).
Exploring the latent space of autoencoders with in-
terventional assays. Advances in Neural Information
Processing Systems, 35:21562–21574.
Lui, Y. M. (2012). Human gesture recognition on prod-
uct manifolds. The Journal of Machine Learning Re-
search, 13(1):3297–3321.
Lui, Y. M., Beveridge, J. R., and Kirby, M. (Jun. 2010).
Action classification on product manifolds. In Proc.
IEEE/CVF CVPR, San Francisco, CA.
Massart, E., Hendrickx, J. M., and Absil, P.-A. (Aug. 2019).
Curvature of the manifold of fixed-rank positive-
semidefinite matrices endowed with the Bures–
Wasserstein metric. In Proc. Geometric Science of
Information Science (GSI), Toulouse, France.
Ng, A. et al. (2011). Sparse autoencoder. CS294A Lecture
notes, 72(2011):1–19.
Oring, A. (2021). Autoencoder image interpolation by
shaping the latent space. Master’s thesis, Reichman
University (Israel).
Rifai, S., Vincent, P., Muller, X., Glorot, X., and Bengio,
Y. (Jun. 2011). Contractive autoencoders: Explicit
invariance during feature extraction. In Proc. ICML,
Bellevue, WA.
Rodolà, E., Lähner, Z., Bronstein, A. M., Bronstein, M. M.,
and Solomon, J. (2019). Functional maps represen-
tation on product manifolds. In Computer Graphics
Forum. Wiley Online Library, pages 678–689.
Rumelhart, D. E., Hinton, G. E., and Williams, R. J. (1986).
Learning representations by back-propagating errors.
Nature, 323(6088):533–536.
Sharma, K. and Rameshan, R. (2021). Distance based ker-
nels for video tensors on product of Riemannian ma-
trix manifolds. Journal of Visual Communication and
Image Representation, 75:103045.
Sharma, K. and Rameshan, R. (May 2019). Linearized ker-
nel representation learning from video tensors by ex-
ploiting manifold geometry for gesture recognition. In
Proc. ICASSP, Brighton, UK.
Takatsu, A. (2011). Wasserstein geometry of Gaussian mea-
sures. Osaka J. Math, 48(4):1055–1026.
Van der Maaten, L. and Hinton, G. (2008). Visualizing data
using t-SNE. Journal of Machine Learning Research,
9(11).
Vincent, P., Larochelle, H., Bengio, Y., and Manzagol, P.-
A. (Jun. 2008). Extracting and composing robust fea-
tures with denoising autoencoders. In Proc. ICML,
Helsinki, Finland.
Zhai, J., Zhang, S., Chen, J., and He, Q. (Oct. 2018). Au-
toencoder and its various variants. In Proc. IEEE
SMC, Miyazaki, Japan.
Zhang, K., Lan, L., Wang, Z., and Moerchen, F. (Apr.
2012). Scaling up kernel SVM on limited resources:
A low-rank linearization approach. In Proc. AISTATS,
La Palma, Canary Islands.
Latent Space Characterization of Autoencoder Variants
67
