
Beyond Labels: Self-Attention-Driven Semantic Separation Using
Principal Component Clustering in Latent Diffusion Models
Felix Stillger
1,2 a
, Frederik Hasecke
2 b
, Lukas Hahn
2 c
and Tobias Meisen
1 d
1
University of Wuppertal, Gaußstraße 20, Wuppertal, Germany
2
APTIV, Am Technologiepark 1, Wuppertal, Germany
{felix.stillger, meisen}@uni-wuppertal.de, {frederik.hasecke, lukas.hahn}@aptiv.com
Keywords:
Diffusion Model, Self-Attention, Segmentation.
Abstract:
High-quality annotated datasets are crucial for training semantic segmentation models, yet their manual cre-
ation and annotation are labor-intensive and costly. In this paper, we introduce a novel method for generating
class-agnostic semantic segmentation masks by leveraging the self-attention maps of latent diffusion models,
such as Stable Diffusion. Our approach is entirely learning-free and explores the potential of self-attention
maps to produce semantically meaningful segmentation masks. Central to our method is the reduction of
individual self-attention information to condense the essential features required for semantic distinction. We
employ multiple instances of unsupervised k-means clustering to generate clusters, with increasing cluster
counts leading to more specialized semantic abstraction. We evaluate our approach using state-of-the-art mod-
els such as Segment Anything (SAM) and Mask2Former, which are trained on extensive datasets of manually
annotated masks. Our results, demonstrated on both synthetic and real-world images, show that our method
generates high-resolution masks with adjustable granularity, relying solely on the intrinsic scene understand-
ing of the latent diffusion model - without requiring any training or fine-tuning.
1 INTRODUCTION
Semantic segmentation is a fundamental task in com-
puter vision, with applications ranging from au-
tonomous driving to medical image analysis. How-
ever, the process of creating large, annotated datasets
to train segmentation models is both time-consuming
and costly. This has prompted increasing interest
in methods that leverage existing data, models, or
mechanisms to bypass the need for data creation
and manual annotation. Generative models, particu-
larly diffusion-based models like Stable Diffusion 2.1
(Rombach et al., 2022a), have shown remarkable ca-
pabilities in generating detailed and coherent images,
yet their potential to assist in generating segmenta-
tion masks remains underexplored. In this work, we
investigate the intrinsic ability of diffusion models to
produce class-agnostic semantic segmentation masks
without any modification to the models themselves
or reliance on additional pre-trained networks (see
Figure 1). Specifically, we exploit the self-attention
a
https://orcid.org/0009-0006-9771-6233
b
https://orcid.org/0000-0002-6724-5649
c
https://orcid.org/0000-0003-0290-0371
d
https://orcid.org/0000-0002-1969-559X
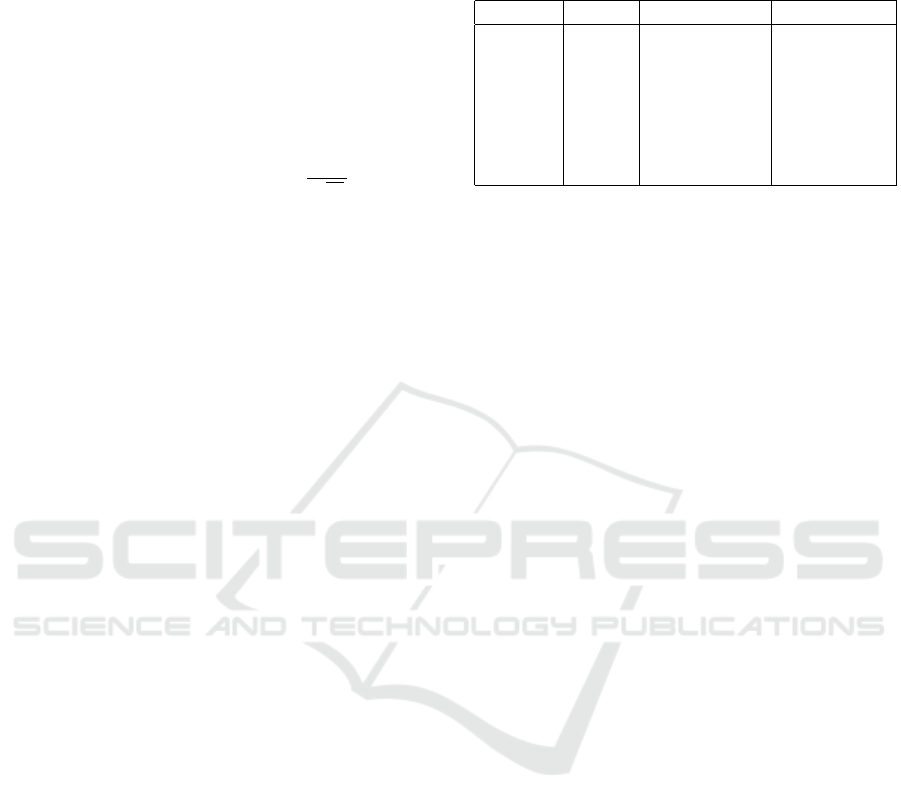
Figure 1: Our method generates class-agnostic yet seman-
tically meaningful segmentation masks. The highlighted
pixel (marked by a star in the upper left image) can be as-
sociated with various semantic categories, such as left eye,
eyes, face, cat, and foreground. These segmentation masks
are produced solely through the self-attention mechanism
of Stable Diffusion, without relying on any external image
features.
mechanisms embedded in latent diffusion models,
which are designed to enhance image generation qual-
ity by capturing relationships between different parts
of the image (Hong et al., 2023). While self-attention
has been used in previous efforts to create segmenta-
68
Stillger, F., Hasecke, F., Hahn, L. and Meisen, T.
Beyond Labels: Self-Attention-Driven Semantic Separation Using Principal Component Clustering in Latent Diffusion Models.
DOI: 10.5220/0013124500003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 2: VISAPP, pages
68-80
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

tion masks, it has not been fully explored at the gran-
ularity of individual attention heads. We hypothesize
that the self-attention heads within these models en-
code sufficient information about image structure and
content, enabling the segmentation of distinct regions
with semantically meaningful boundaries - without
the need for external supervision.
Previous methods, such as (Nguyen et al., 2023)
and (Tian et al., 2024), typically aggregate self-
attention maps by averaging or summing over atten-
tion heads and/or features to manage the large ten-
sor sizes involved. In contrast, our approach lever-
ages the individual multi-head self-attention maps in-
dependently, preserving their distinct objectives and
enabling the derivation of more fine-grained semantic
masks.
Our main contributions are as follows:
• Head-Wise Self-Attention Analysis. We con-
duct a detailed analysis of the individual self-
attention maps from each head in Stable Diffu-
sion, demonstrating how they contribute to se-
mantic separation within an image.
• Class-Agnostic Mask Generation. We propose
a novel method for generating semantic segmen-
tation masks across multiple levels of granular-
ity—ranging from coarse to fine—directly from
the self-attention features of the diffusion model.
• Zero-Shot Segmentation. We validate our ap-
proach in the context of zero-shot segmentation,
showcasing the ability to interpret and semanti-
cally segment real-world images without any prior
training or fine-tuning.
2 RELATED WORK
Numerous text-to-image diffusion models have been
developed to generate images from textual prompts,
with notable examples including DALL-E 3 (Betker
et al., 2023), Imagen (Saharia et al., 2022), Muse
(Chang et al., 2023), and Stable Diffusion (Rombach
et al., 2022b). Among these, Stable Diffusion stands
out as an open-source model capable of synthesizing
high-resolution images containing multiple objects in
one scene. This is achieved by encoding the input
text into a latent space, where a diffusion process is
applied using a denoising network. The final image is
then reconstructed through a decoder.
Previous works have explored the role of self-
attention in generative models, particularly diffusion-
based models. For instance, (Vaswani et al., 2023)
examined the self-attention mechanism in Stable Dif-
fusion and concluded that it encapsulates valuable
layout and shape information. SegDiff (Amit et al.,
2022) introduces a segmentation approach for diffu-
sion models but relies on ground truth data for ac-
curate segmentation. DiffuMask (Wu et al., 2023),
building on AffinityNet (Ahn and Kwak, 2018), uses
cross-attentions to generate foreground masks, yet,
like SegDiff, it produces only one foreground mask
per image. Dataset Diffusion (Nguyen et al., 2023)
was the first to enable the generation of multiple ob-
ject masks per image by combining both self- and
cross-attentions. However, its reliance on cross-
attentions results in coarse segmentation masks, as
cross-attentions provide only broad region informa-
tion and still require the finer details derived from
self-attention maps.
SliME (Khani et al., 2024) refines self-attentions
to improve cross-attention segmentation but still re-
quires ground truth data to specify the segmentation
style. Ref-Diff (Ni et al., 2023) demonstrates how
generative models can leverage the connection be-
tween visual elements and text descriptions, and in-
troduces a diffusional segmentor for zero-shot seg-
mentation. DiffSeg (Tian et al., 2024) treats atten-
tion resolutions differently via an iterative merging
approach but averages multi-head attentions, assum-
ing similar objectives using Kullback-Leibler diver-
gence. A network-free approach to obtain semantic
segmentation masks is proposed in A network-free
approach is proposed in (Feng et al., 2023), where
semantic segmentation masks are generated by ob-
serving pixel connectivity through synthetic image
variants, utilizing Generative Adversarial Networks
(Goodfellow et al., 2014) rather than diffusion mod-
els. Meanwhile, iSeg (Sun et al., 2024) proposes an
iterative refinement framework to reduce the entropy
of self-attention maps, applying their module to unsu-
pervised segmentation tasks and mask generation for
synthetic datasets.
DAAM (Tang et al., 2022) introduces a method
to visualize the cross-attention between words and
pixels, producing pixel-level attribution maps us-
ing word-pixel scores from the denoising network.
OVAM (Marcos-Manch
´
on et al., 2024) extends this
idea to generate cross-attention maps for open vo-
cabulary tasks, enabling the segmentation of semantic
meanings that may not be explicitly represented in the
textual prompt without altering the image generation
process.
To the best of our knowledge, no existing method
leverages individual self-attention heads in a learning-
free manner to generate multiple high-resolution
masks for semantic separation within attention-based
generative models.
Beyond Labels: Self-Attention-Driven Semantic Separation Using Principal Component Clustering in Latent Diffusion Models
69
3 INTERPRETING
SELF-ATTENTIONS
The attention mechanism in diffusion models is used
to focus on particular objectives and enhance recon-
struction abilities, thereby improving the final sam-
ple quality (Hong et al., 2023). The basic scaled dot-
product attention is computed as follows:
Attention(Q, K, V ) = softmax
QK
T
√
d
k
V (1)
Where: Q ∈ R
n×d
k
is the query matrix, K ∈ R
n×d
k
is
the key matrix, V ∈ R
n×d
v
is the value matrix, d
k
is
the dimensionality of the key/query vectors, d
v
the di-
mensionality of the value vector and n identical layers
(Vaswani et al., 2023).
In multi-head attention, the final attention map is
derived from the outputs of several individual atten-
tion heads. Each head processes the input by linearly
projecting the query, key, and value matrices into dis-
tinct subspaces, allowing each head to focus on differ-
ent parts of the input. These projections are then com-
bined by concatenating the outputs from all heads, re-
sulting in a richer representation that captures more
nuanced relationships between the elements in the in-
put.
MHead(Q, K, V ) = Concat(head
1
, .., head
h
)W
O
with head
i
= Attention(QW
Q
i
, KW
K
i
, VW
V
i
)
(2)
Where: W
Q
i
∈ R
d
model
×d
k
, W
K
i
∈ R
d
model
×d
k
, W
V
i
∈
R
d
model
×d
v
, and W
O
∈ R
hd
v
×d
model
(Vaswani et al.,
2023).
This allows to jointly attend to information from dif-
ferent representations in different subspaces (Vaswani
et al., 2023).
In the context of self-attention mechanisms, par-
ticularly within the context of multi-head attention,
this means that each head in the transformer model is
capable of focusing on distinct objectives and captur-
ing different aspects of the features.
Stable Diffusion is comprised of three main com-
ponents. To encode and decode images, a pre-
trained VAE (Kingma and Welling, 2022) is em-
ployed. The second component is a text encoder, such
as CLIP (Radford et al., 2021), which encodes a tex-
tual prompt into latent space. The core of the model
is the denoising U-Net, which reconstructs images
under conditioning from noise by learning a denois-
ing strategy that incorporates self- and cross-attention
mechanisms (Rombach et al., 2022b).
In Stable Diffusion, multi-head self-attention layers
are positioned at various stages within the denoising
Table 1: Self-attention positions with layer name, count of
individual heads, resolution and feature size of Stable Dif-
fusion 2.1.
Name Heads Resolution Feature Size
Down-1 5 4096 (64x64) 64
Down-2 10 1024 (32x32) 64
Down-3 20 256 (16x16) 64
Mid 20 64 (8x8) 64
Up-2 20 256 (16x16) 64
Up-3 10 1024 (32x32) 64
Up-4 5 4096 (64x64) 64
U-Net architecture. Our method utilizes Stable Dif-
fusion 2.1, as this version features a larger number of
attention heads compared to earlier versions, such as
Stable Diffusion 1.5, which incorporates only eight
parallel heads per layer (Rombach et al., 2022a). The
specific positions and sizes of the self-attention layers
in Stable Diffusion 2.1 are summarized in Table 1 and
further detailed in Figure 12.
Previous methods for leveraging attention maps,
such as the aforementioned Dataset Diffusion
(Nguyen et al., 2023), aggregate information by sum-
ming and averaging the head-wise output over all time
steps without using additional pre-trained models for
practical purposes. The averaging and summing pro-
cedures lead to a loss of the individual separation ca-
pabilities inherent to each attention head, as they fo-
cus solely on aggregated areas of interest. To par-
tially recover this lost precision, methods like Dataset
Diffusion (Nguyen et al., 2023) average across multi-
ple iteration steps. In contrast, our approach seeks to
preserve and condense the rich information embed-
ded within each self-attention map. We hypothesize
that these maps inherently encode sufficient details to
separate objects in the generated image based on their
semantic meaning. Averaging across attention heads,
however, can dilute the semantic information, limit-
ing the ability to capture fine-grained distinctions.
Our methodology operates under the assumption
that head-wise data can be effectively reduced to a
more manageable form while preserving the unique
subspace representation of each individual attention
head. Furthermore, the specific objectives of each
head can be visualized, allowing for direct inspection
of their role in the segmentation process.
Each layer within the self-attention mechanism cap-
tures distinct features and serves different objectives.
In Stable Diffusion 2.1, the number of attention heads
varies based on their position within the architecture.
The downstream flow contains two consecutive trans-
former layers for self-attention, while the upstream
flow incorporates three consecutive transformer lay-
ers, and the middle block features a single transformer
layer. Although the resolutions change in accordance
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
70

with the U-Net layers, the feature dimensions remain
consistent across all layers.
Selecting the layers and features with the high-
est probabilities for object separation based on se-
mantic meaning is a significant challenge due to the
high-dimensional nature of the multi-head outputs.
To facilitate visual interpretation of these objectives,
we employ Principal Component Analysis (PCA) as
a standard dimensionality reduction technique. A
beneficial side effect of dimensionality reduction is
its ability to highlight the most distinguishable ele-
ments of a feature map while simultaneously discard-
ing noise. Visualizing the PCA of an individual atten-
tion head enables us to interpret and understand the
semantics encoded within that head.
A straightforward method involves computing the
top three principal components of a self-attention fea-
ture map for an individual head and mapping these
components to RGB-values. In this mapping, simi-
lar colors indicate alignment across all three princi-
pal components, whereas visual differences in color
highlight discrepancies in at least one component.
This color-based separation allows for the easy iden-
tification of clusters and their corresponding objec-
tives. Additionally, we interpret the resulting PCA
values not only as a visual representation of the self-
attention outputs but also as an encoding of objec-
tives, with the distances between these representa-
tions reflecting similarities in image construction ob-
jectives. The resulting clusters/classes need not be
human-understandable; they correspond to the intrin-
sic clusters that the model perceives as classes and
their subclasses. Still the principal components are in-
terpreted as important objectives that are able to rep-
resent a human-made class definition. This implies
that a face contains subclasses like eyes, which are
identified without prompting, but the model must un-
derstand that eyes must be in a particular area of the
face. The PCA is conducted to understand the under-
lying objectives of each head and further to improve
and accelerate downstream algorithms by extracting
the most semantically significant data.
To illustrate our findings, we provide an example
using the prompt: ”a baby in a yellow toy car”, along
with the classes depicted in the image: [”person”,
”car”], follows the prompt style by (Nguyen et al.,
2023), which appends the class names to the actual
prompt separated by ”;”. This prompt is employed
to generate an image using Stable Diffusion, and the
resulting output is shown in Figure 2.
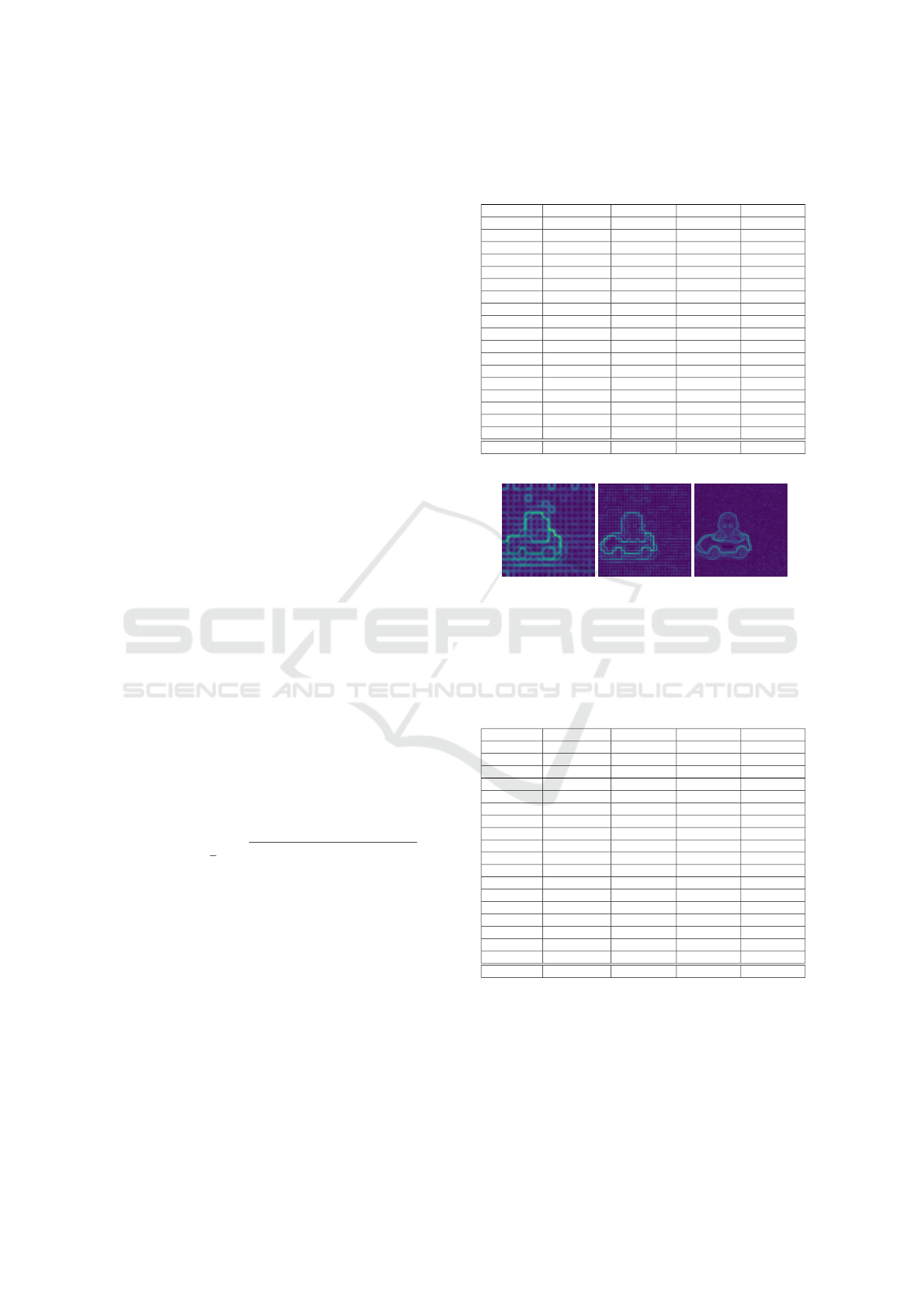
Figure 3 depicts the visualization of the first head
of every multi-head attention (see Appendix Figure
12 for more information). The visualization starts
with the downstream flow, transitioning from a 64x64
Figure 2: Output image by Stable Diffusion 2.1 based on
the prompt: ”a baby in a yellow toy car; person, car”.
self-attention resolution to 16x16. As the resolution
decreases, a greater number of distinct color clus-
ters become apparent, while higher resolutions reveal
finer clusters and more detailed features. The con-
tours of objects are marked by abrupt color changes,
effectively approximating the original image without
relying on image space features. This demonstrates
that the principal components successfully condense
the objectives, visualize the objectives in a human-
interpretable way, support our hypothesis of the in-
trinsic semantic information, and can be further uti-
lized to segment an image into its semantic compo-
nents.
Figure 3: Principal component visualization of the first
multi-head attention heads in U-Net order, progressing from
left to right and top to bottom. The resolution begins at
64x64 and decreases to 16x16 in the down layers, with the
mid block at 8x8 resolution. The upstream flow starts at
16x16 and increases back to 64x64 in the up layers. First
three main components are mapped to RGB-values
The first self-attention in Figure 3, located at the
upper left, demonstrates objective separation capabil-
ity. The eyes, mouth, and hair are represented with
distinct colors, indicating significant differences in at
least one principal component, in comparison to the
rest of the face and skin. It is noteworthy that the sec-
ond (right) visualization of the first downstream layer
Beyond Labels: Self-Attention-Driven Semantic Separation Using Principal Component Clustering in Latent Diffusion Models
71
shows a distinct color cluster for the wheels (green-
ish) of the car, while the left head’s visualization has
one color cluster for the black parts (including shadow
of the car and wheels) of the car. Averaging over
these head maps would result in the loss of impor-
tant details, as some of these distinct clusters would
be merged or diminished. This underscores the ra-
tionale for our approach of leveraging head-specific
features, as individual heads may capture unique ob-
jectives that are otherwise lost through averaging.”
However, it is important to note that the car and
the child’s face may appear closely related in this rep-
resentation, leading to similar colors. This observa-
tion highlights the necessity of incorporating diverse
heads and their respective features when applying
clustering algorithms to ensure more effective sepa-
ration of the image’s distinct semantic components.
The subsequent principal component visualization
of the second down layer with a 64x64 resolution suc-
cessfully separates the car from the child. However,
as the resolution of the self-attention principal com-
ponents decreases, the clusters lose finer details Ad-
ditionally, we observed subtle differences in seman-
tic separation between the upstream and downstream
self-attention layers, which we further analyze in Ta-
ble 2.
Figure 3 already illustrates the advantage of vi-
sualizing individual heads. Notably, both the down-
stream and upstream layers reveal distinct color clus-
ters that correspond well to the objects in the output
image shown in Figure 2.
In addition to the upstream and downstream lay-
ers, Stable Diffusion 2.1 includes a single self-
attention layer in the middle block. To explore its
relevance, we conducted a PCA with three compo-
nents and visualized the head outputs. The results re-
vealed no noticeable color clusters corresponding to
the semantic meaning of the output image, as shown
in Figure 14, which includes all 20 heads of the mid-
dle block from the previous example.
Our experiments indicate that this layer does not
contribute meaningful semantic information. We hy-
pothesize that this lack of semantic separability is due
to the block’s low resolution. This conclusion is fur-
ther supported by the quantitative results presented in
Table 8, where we repeated the analysis from Table 2
but included the middle self-attention features. The
overall performance did not improve, and in some
cases, it even worsened when the middle block fea-
tures were incorporated. Consequently, we exclude
the middle block from further investigation.
4 METHODOLOGY FOR MASK
GENERATION
Figure 4: Main methodology of our proposed method.
Our method is built on top of the OVAM (Marcos-
Manch
´
on et al., 2024) source code to extract the raw
self-attentions from the denoising U-Net. To demon-
strate the effectiveness of our approach, we utilize
publicly available text prompts from Dataset Diffu-
sion (Nguyen et al., 2023), which are derived from
images in the Pascal VOC training dataset (Evering-
ham et al., 2012). The image captions for these
prompts are generated using BLIP (Li et al., 2022).
4.1 Process Self-Attentions
Our main methodology, as illustrated in Figure 4, in-
volves extracting self-attention maps from up to 16
different layers. The specific positions of these layers
are detailed in Figure 12, with corresponding sizes
presented in Table 1. To process the self-attention
maps, we apply bilinear upsampling to the head-wise
tensors, which are reduced via principal component
analysis, ensuring a uniform shape across all layers.
This approach yields PCA feature maps from up to
195 individual heads, all at the same resolution. De-
pending on their position within the network, these
maps may capture different intrinsic semantic infor-
mation.
To obtain masks from the reduced self-attentions,
we apply k-means clustering to the stacked princi-
pal component features of the sub-selected heads. K-
means is a simple clustering algorithm that does not
need any additional parameters besides the cluster
count k. This is an advantage if we want fast con-
vergence for clusters without the need of fine-tuning
parameters on our examples. We use a fixed seed for
initialization to ensure that our method remains re-
producible over all experiments. To address potential
issues with fixed initialization, we experiment with
various cluster counts and cluster the same features
multiple times over an increasing cluster count. This
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
72

allows us to produce multiple masks with different
semantic meaning per image. As a straightforward
mask reduction step, we merge masks with a high in-
tersection over union into a single unified mask. Ex-
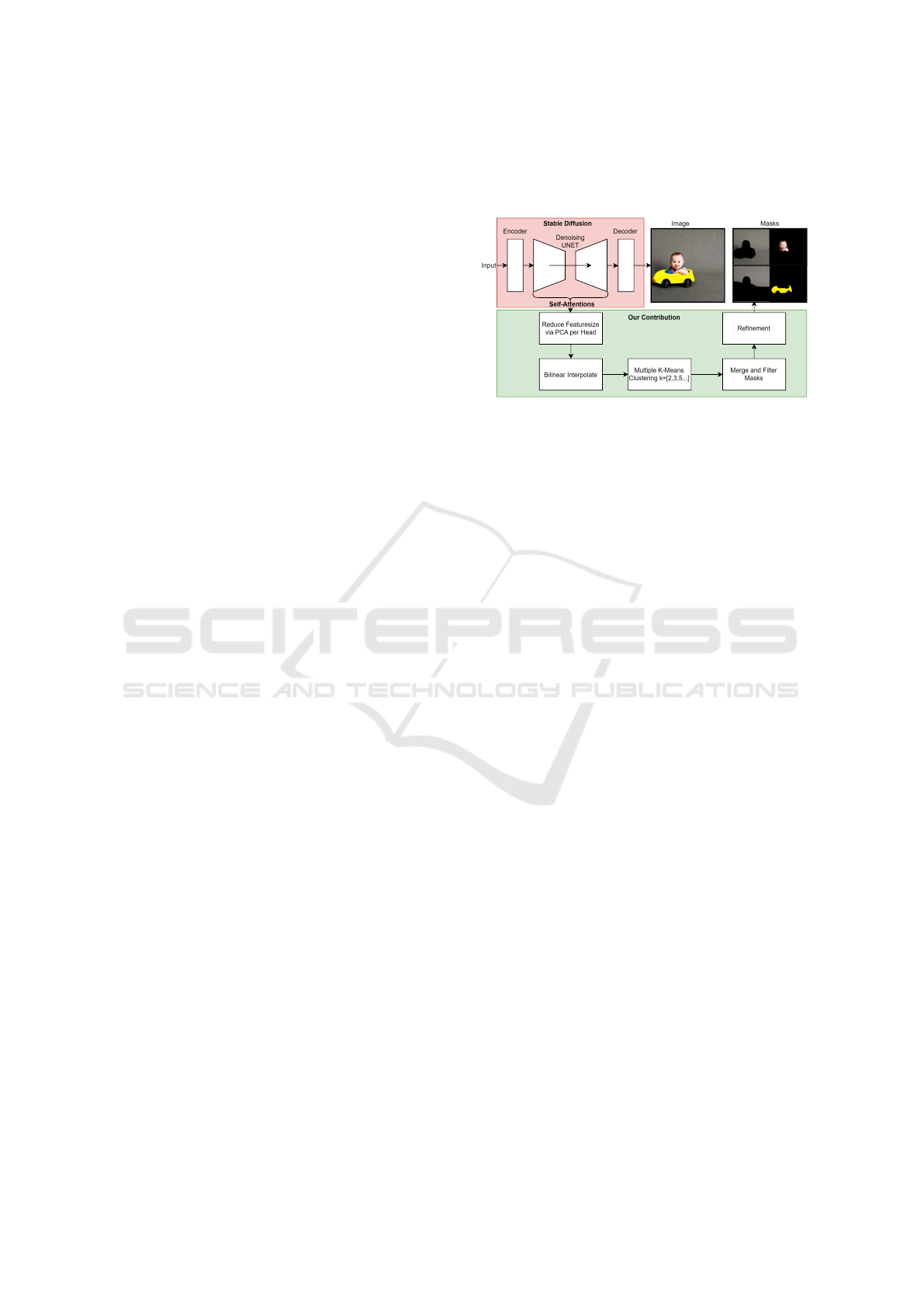
amples of this approach are shown in Figure 5, where
the generated images are displayed in the top row,
and the corresponding clusters, with cluster counts
∈ [2, 5, 6, 10, 20], are shown in the rows below. A low
cluster count corresponds highly to a background-
foreground segmentation [cluster count = 2] whereas
the clusters with a cluster count of [5,6] correspond to
high-level classes like child, car or cat. Clusters from
a high cluster count [10, 20] correspond to low-level
semantic segmentation masks like face, eyes and ears.
The resolution and the therefore abstraction level
of the self-attentions is crucial: low-resolution self-
attentions provide connectivity and distinguishable
features for low-level objectives and therefore coarse
segmentation but suffer from imprecise contours,
whereas high-resolution self-attentions capture finer
details, such as facial features, but may miss some
obvious connections among masks (see Figure 11 for
more details).
Depending on the target objective and computing
time, parameters such as the number of k-means clus-
ters, upsampling resolution, number of principal com-
ponents, and position selection of the self-attention
layers can be varied. We utilize scikit-learn (Pe-
dregosa et al., 2011) to conduct our upsampling and
clustering. The choice of the optimal setup depends
on the desired outcome. For instance, if the goal is to
segment only a person, a coarse segmentation, such as
background versus foreground, might suffice. How-
ever, if the masks are intended for an image-to-image
inpainting approach and a detailed definition of in-
stance e.g. ”eyes” are of interest, a much finer seg-
mentation is required and therefore a higher cluster
count has to be set.
As demonstrated qualitatively in Figure 5 and Fig-
ure 11, our approach is capable of segmenting fine-
grained classes and multiple objects within a single
scene. For instance, in the last column, a monitor dis-
playing content is placed on a table in a room. Our
method effectively separates the monitor, its content,
and the table it is placed on. With an increasing clus-
ter count, hierarchical masks can be defined, such as
identifying a head as part of a person, which is part of
the content on the monitor, which in turn belongs to
the monitor. Additionally, in the Appendix Figure11
provides a comparison of the generated clusters de-
rived solely from the 16x16 self-attention maps.
This qualitative analysis shows that clusters de-
rived from low-resolution self-attentions tend to cap-
ture more semantic meaning, closely aligning with
Image
2 Clusters
5 Clusters
6 Clusters
10 Clusters
20 Clusters
Figure 5: K-means clustering over multiple cluster counts
and five examples. Every color represents a single clus-
ter for attention-maps from sizes [16x16, 32x32, 64x64].
See more in Figure 11 (Appendix), where also clusters from
only [16x16] are presented.
high-level classes such as those in Pascal VOC. In
contrast, higher-resolution self-attentions are better
suited for generating fine-grained, low-level segmen-
tations. However, due to the significantly lower res-
olution of self-attentions - at minimum eight times
lower than the output image — the principal compo-
nents between clusters lack well-defined edges, espe-
cially in lower resolutions.
As the number of clusters increases, some pseudo-
clusters may form due to transitions between truly
meaningful clusters, which is an inherent limitation of
the bilinear interpolation process. Additionally, ob-
ject contours remain uncertain because no final out-
put image features are incorporated into the clustering
process. Introducing extraneous information, such as
pixel positions or image features, could result in clus-
ters being overly influenced by these features, thereby
reducing the interpretability and effectiveness of the
clustering method.
To improve accuracy, a refinement method is
needed. We propose leveraging the upsampling error
as a potential means of refinement and incorporating
image features in a post-processing step. A brief anal-
ysis of the upsampling error is provided in the Ap-
pendix 6.
Beyond Labels: Self-Attention-Driven Semantic Separation Using Principal Component Clustering in Latent Diffusion Models
73
4.2 Hyperparameter-Studies and
Evaluation
In order to also quantitatively evaluate our method
and determine suitable parameters, we use two ex-
ternal task-specific state-of-the-art models to gener-
ate pseudo-labels on images generated by the diffu-
sion model. First, we employ the Segment Anything
model (Kirillov et al., 2023) with a ViT-L backbone,
which is expected to generate instance masks without
domain knowledge. Second, we use Mask2Former
(Cheng et al., 2022) with a Swin-L backbone, which
is pre-trained on the ADE20K dataset (Zhou et al.,
2017) and is available as a pre-trained implemen-
tation via the mmseg toolbox (Contributors, 2020).
Unlike instance segmentation, this model provides
class-specific semantic segmentations, and its train-
ing classes closely align with the Pascal VOC classes,
which are the basis for the prompts used in our model.
Both of these methods are trained on labeled
segmentation ground truth, whereas our method has
never seen or trained on a segmentation mask. In-
stead, our method relies solely on the intrinsic seman-
tic knowledge derived from the self-attentions of Sta-
ble Diffusion and its derived features.
To assess the performance of our method, we
compare the semantic masks generated by our ap-
proach with those produced by the two evaluation
models. This comparison aims to highlight the effec-
tiveness of our method relative to an instance-focused
model and a class-based segmentation model. We
omit the classification component, as it would only be
feasible with cross-attention. For evaluation, we use
Intersection over Union (IoU) as our metric, defined
as follows:
IoU(A,B) =
Area of Intersection
Area of Union
=
|A ∩B|
|A ∪B|
(3)
To provide a comprehensive evaluation of the
most significant masks, we define the Top-n metric.
This metric selects the n-largest masks from the ex-
ternal models and computes the average IoU with the
corresponding classes from our method:
Top-n =
1
N
N
∑
n=1
max
B∈predicted masks
|A
n
∩B|
|A
n
∪B|
(4)
where A
n
represents the n-th largest mask from the
external models, and B denotes the masks from our
method.
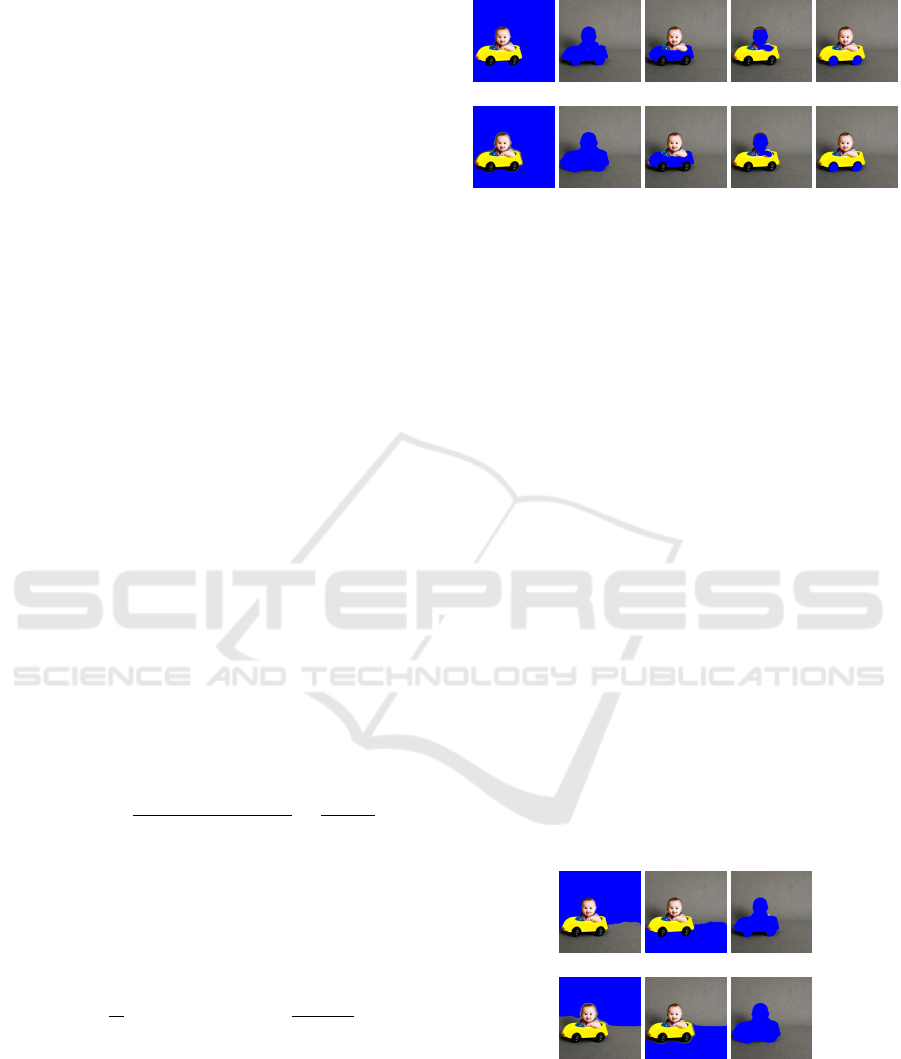
For the final evaluation, we average this score
over all samples. Figure 6 presents our evaluation for
the first sample using the Segment Anything Model
(SAM), and Figure 7 shows the performance of our
method compared to Mask2Former.
SAM Pseudo Ground Truth
Our Matched Masks
Figure 6: Top: SAM Top-5 masks colored in blue. Bottom:
Matched masks from our method. The IoUs between the
pseudo ground truth and our method’s masks are 0.97, 0.82,
0.94, 0.87, and 0.77 (from left to right).
The SAM evaluation provides an example of fine,
pixel-accurate masks. While it segments parts of
the image very effectively, our method identifies not
only the corresponding masks but also additional se-
mantically consistent variations that are not iden-
tified by SAM. We do not provide additional do-
main knowledge to SAM, such as masks, points or
boxes, to obtain the raw scene-interpreted masks from
SAM. On the other hand, the Mask2Former evalu-
ation serves as a sanity check, as it was trained on
the ADE20K dataset, which limits its ability to gen-
eralize beyond its training domain. In the example,
Mask2Former splits the background into upper and
one lower parts, with only a single mask for the fore-
ground. Our method closely matches these masks of
the Mask2Former network as shown in Figure 7.
It is important to note that SAM contributes to
the Top-1 to Top-5 average score due to its ability
to generate a larger number of masks. In contrast,
Mask2Former only contributes to the Top-1 to Top-
3 average score, as it generates fewer class-specific
masks. We observed that SAM typically produces
more masks than Mask2Former, making it a more re-
liable source for the Top-n metric.
Mask2Former Pseudo Ground Truth
Our Matched Masks
Figure 7: Top: Mask2Former Top-3 masks colored in blue.
Bottom: Matched masks from our method. The IoUs be-
tween the pseudo ground truth and our method’s masks are
0.90, 0.87, and 0.82 (from left to right).
Next, we present a study on layer positions and
reweighting of the features in Table 2. We hypothe-
size that the position of the layer affects the semantic
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
74
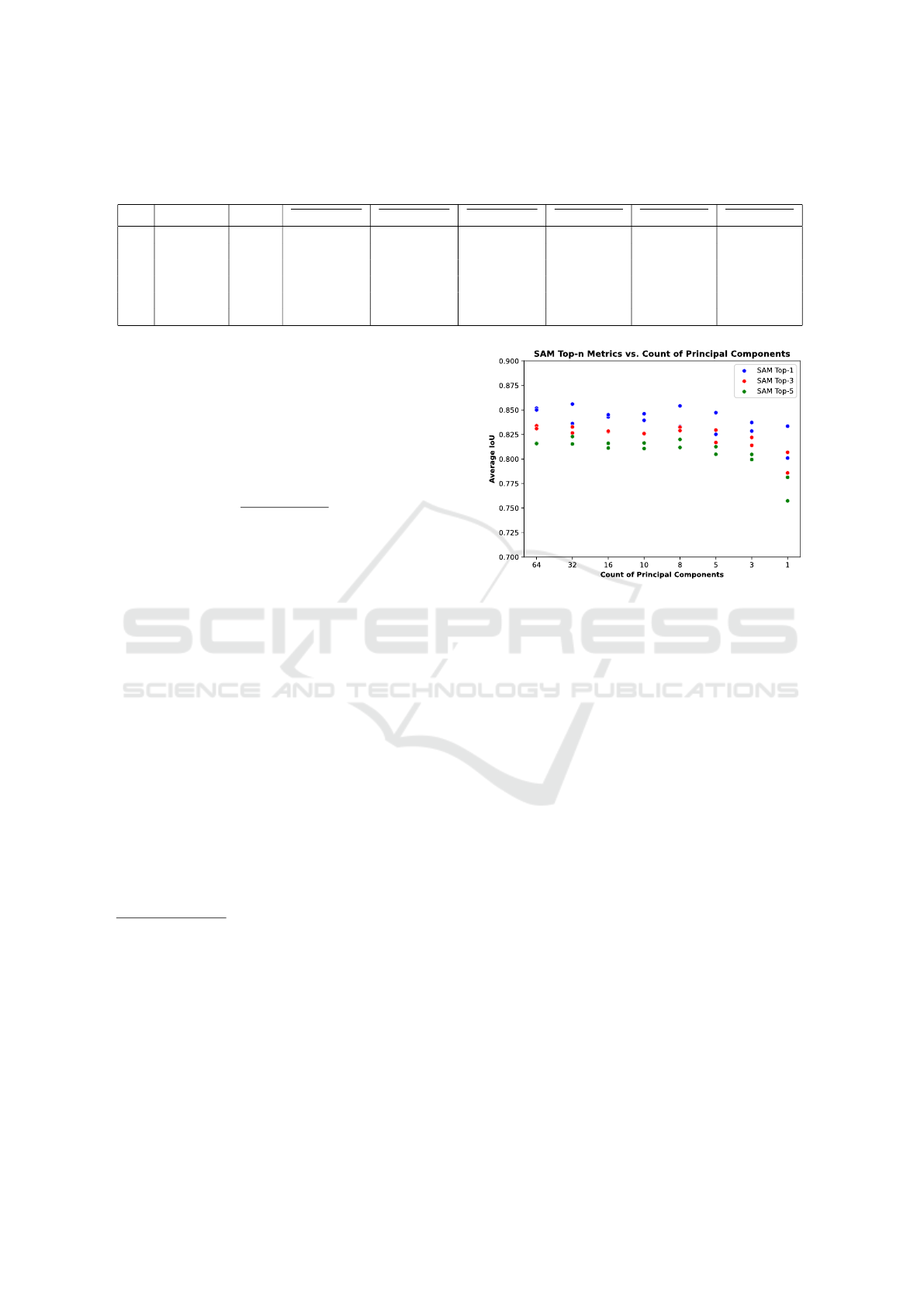
Table 2: Study on reweighting and layer positions, evaluated by the average top scores across multiple samples (measured in
average IoU). Self-attentions at resolutions of [16, 32, 64] are used with three principal components, bilinearly upsampled to
a resolution of 64. No middle block is incorporated.
ID Reweight Layer SAM Top-1 SAM Top-3 SAM Top-5 M2F Top-1 M2F Top-3 M2F Top-5
0 True down 0.80 0.79 0.76 0.76 0.73 0.64
1 True up 0.84 0.82 0.79 0.79 0.76 0.67
2 True both 0.84 0.81 0.78 0.79 0.76 0.66
6 False down 0.84 0.82 0.79 0.80 0.78 0.67
7 False up 0.85 0.83 0.80 0.81 0.78 0.68
8 False both 0.84 0.83 0.80 0.80 0.78 0.68
meaning of the generated masks. While the down-
flow is expected to focus on condensing information,
the up-flow is hypothesized to support image recon-
struction. The reweighting process addresses the im-
balance in the feature map distribution across differ-
ent layer positions, particularly due to the higher num-
ber of 16x16 attention layers compared to 64x64 lay-
ers. The reweighting is defined as follows:
x
reweighted
=
x
original
(r
i
) ·r
i
max(r
1
, r
2
, r
3
)
r
i
∈{16,32,64}
(5)
where x are the features which get reweighted by their
resolution.
The study presented in Table 2 demonstrates that
self-attentions from the upstream layers are more
valuable for reconstructing accurate masks compared
to the downstream layers. All rows with only ”down”-
layers are inferior to gather only ”up”-layers for
self-attention. However, including features from the
downstream layers does not disadvantage the perfor-
mance, but using ”both”-self-attentions has no effect
on performance. Also, reweighting has no positive
impact in this scenario, and the non-reweighted clus-
ters are slightly ahead, in conclusion supporting the
importance of the low-resolution self-attention maps.
We also conducted a study on the impact of
the number of principal components, as shown in
Figures 8 and Table 7. These figures demonstrate
that applying PCA to the self-attention features en-
hances clustering compared to using the raw features.
While there is no significant change in mask accu-
racy, the speedup achieved is defined by speedup =
64
#principal components
. The study shows an improvement
in the SAM Top-n metric when using approximately
eight principal components, with the optimal number
being around 32. This analysis was conducted with
bilinear feature upsampling to a resolution of 256.
The study also reveals that we can reduce the origi-
nal feature parameters by more than a factor of 20 (by
applying PCA to eight components and using only the
”up” attention layers) without sacrificing the final av-
erage performance.
Finally, we examined how the position of feature
layers affects which resolution of self-attention pro-
Figure 8: Impact of varying the number of principal compo-
nent on multiple SAM-scores. Higher dimensionality does
not necessarily lead to a greater performance. Detailed met-
rics in Table 7.
vides the most accurate semantic information. This
is motivated by the fact that we have qualitatively
noticed that the low-resolution self-attention fea-
tures represent low-level semantics, while the higher-
resolution self-attention carries finer details (see Fig-
ure 11). Conversely, the higher resolution self-
attentions should tend to better represent the contour
of an object because of the higher feature resolution.
Based on this study, we concluded that the PCA com-
ponents should be taken from all reasonable attention
layers across all resolutions, specifically the [16x16,
32x32, 64x64] self-attention layers for best perfor-
mance, as shown in Table 6. The mix of coarse and
fine features provides the best performance. For effi-
ciency, we bilinearly upsampled to 64x64 to perform
this study in a reasonable time frame.
5 ZERO-SHOT SEGMENTATION
To demonstrate the capabilities of our findings, we
conduct our method with an image-to-image ap-
proach to enable zero-shot segmentation on all types
of images. To validate, we apply our method on a
real-world image, which we try to denoise with Sta-
Beyond Labels: Self-Attention-Driven Semantic Separation Using Principal Component Clustering in Latent Diffusion Models
75

Image
2 Clusters
5 Clusters
15 Clusters
20 Clusters
Figure 9: Zero-Shot segmentation of our method with as-
cending cluster counts from top to bottom, going from high-
level segmentation to low-level segmentation.
ble Diffusion to obtain the self-attention features. In
order not to change the original content of the image
too much and still obtain segmentation masks we ap-
ply only a small denoising strength (strength = 0.05)
and only perform 2 iteration steps. Furthermore,
we do not use an input prompt (we input an empty
string), but one can easily be generated with any im-
age descriptor, such as BLIP (Li et al., 2022). We
validate our method using the public datasets Pascal
VOC and Cityscapes, where we are able to compare
against a public ground truth and the performance of
the SOTA-segmentation algorithm SAM. Our work-
flow is the same as presented previously in section
4. Figure 9 illustrates the general capabilities of our
method on real-world images. Our method demon-
strates that self-attention features convey semantic in-
formation for classes and even subclasses, and that the
internal model’s interpretation of them can be visual-
ized. The zero-shot application proves that the self-
attentions can be employed to segment the content
of an image not only working for image generation
by textual prompt. This method can also be utilized
to obtain segmentation masks in the wild. Remark-
able in our method is that it connects same classes
across pixel gaps and group classes together, visual-
ized in the third image of Figure 9 from the left. Peo-
ple’s faces or clothes are assigned to the same cluster.
Table 3: Performance comparison of our method and SAM
variants on Cityscapes and Pascal VOC validation datasets
in average class IoU.
Validation Set Our Method SAM ViT-H SAM ViT-B SAM ViT-L
Pascal VOC Semantic 0.66 0.69 0.39 0.65
Pascal VOC Instance 0.62 0.74 0.39 0.65
Cityscapes Semantic 0.27 0.44 0.26 0.43
Cityscapes Instance 0.21 0.26 0.15 0.25
As the number of clusters increases, these high-level
clusters split, as discussed, into lower-level clusters.
As the number of clusters increases, the high-level
clusters are divided into lower-level clusters. This is
possible due to the lack of additional pixel position
data or additional information.
In order to evaluate and compare our method with
SAM, we conduct an analysis using the Pascal VOC
and Cityscapes validation sets. We bypass the classi-
fication task and match the generated mask with the
highest IoU to the ground truth mask for both SAM
and our method. Subsequently, we determined the
class-wise IoU per image and averaged the results
over all samples. We chose an average class IoU per
image instead of an mIoU to not consider complexer
scences with finer and smaller masks less than simple
scenes. We use both the semantic and instance labels
for comparison. The results are presented in Table 3,
which shows that the best performance was achieved
on the semantic segmentation validation set of the
Pascal VOC dataset. Our method outperforms the
strongest SAM with ViT-H backbone in some classes
(see Appendix Table 4 for more details).
However, the overall average class performance
is slightly below that of the best performing SAM
model, but above the rest. The discrepancy widens in
the case of instance segmentation, where the metric of
the best performing SAM model is noticeably higher,
but our method is close to the SAM model with ViT-
L backbone. In the Cityscapes datasets, there are a
lot more finer and complex segmentations, and our
method falls slightly more behind compared to best
performance of the best SAM and can now only per-
form better than the weakest SAM model with ViT-B
backbone.
Nevertheless, our performance is remarkable con-
sidering that we use an untrained method for seman-
tic segmentation, while SAM is self-supervised and
trained on billions of images and millions of anno-
tated masks. We have added some examples in the
Appendix in Figure 13 where one will notice that our
method still cannot match the pixel accuracy of SAM,
but is able to obtain masks where a class is well repre-
sented. Furthermore, our method is superior in some
edge cases where a class is occluded by other things
and our method is able to associate a class with a
mask where all SAM model fail to segment (see Fig-
ure 13 example horse). This is due to the underlying
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
76

scene understanding of the Stable Diffusion model
compared to a mask-generating optimized model such
as SAM.
6 CONCLUSION
We have presented a novel approach to generate
high-resolution semantic masks using only the self-
attention maps from diffusion models. We show that
our method extracts semantically meaningful masks,
without requiring additional learning or pre-trained
models. This approach can be employed to directly
obtain semantic masks for self-generated images us-
ing textual prompts as input only or for zero-shot
segmentation, where an input image is given. Our
method enables the utilization of Stable Diffusion’s
inherent scene understanding for semantic separation,
a task it has not been explicitly trained on. Validation
with SAM (Kirillov et al., 2023) shows that our ap-
proach produces high-quality semantic segmentation
on par with state-of-the-art methods, further allowing
flexibility to adjust segmentation granularity.We fur-
ther show that the generated masks benefit from Sta-
ble Diffusion’s scene understanding, to provide clus-
ters of consistent semantic meaning beyond occlusion
and pixel gaps.
As a direction for future work, we suggest using
cross-attention maps to further obtain class labels for
the generated masks. Additionally, a post-processing
step using the upsampling error and image features
to refine the masks will increase the accuracy of the
masks.
REFERENCES
Ahn, J. and Kwak, S. (2018). Learning pixel-level semantic
affinity with image-level supervision for weakly su-
pervised semantic segmentation.
Amit, T., Shaharbany, T., Nachmani, E., and Wolf, L.
(2022). Segdiff: Image segmentation with diffusion
probabilistic models.
Betker, J., Goh, G., Jing, L., Brooks, T., Wang, J.,
Li, L., Ouyang, L., Zhuang, J., Lee, J., Guo, Y.,
et al. (2023). Improving image generation with bet-
ter captions. Computer Science. https://cdn. openai.
com/papers/dall-e-3. pdf, 2(3):8.
Chang, H., Zhang, H., Barber, J., Maschinot, A., Lezama,
J., Jiang, L., Yang, M.-H., Murphy, K., Freeman,
W. T., Rubinstein, M., Li, Y., and Krishnan, D. (2023).
Muse: Text-to-image generation via masked genera-
tive transformers.
Cheng, B., Misra, I., Schwing, A. G., Kirillov, A., and Gird-
har, R. (2022). Masked-attention mask transformer for
universal image segmentation.
Contributors, M. (2020). MMSegmentation: Openmmlab
semantic segmentation toolbox and benchmark. https:
//github.com/open-mmlab/mmsegmentation.
Everingham, M., Van Gool, L., Williams, C. K. I.,
Winn, J., and Zisserman, A. (2012). The PASCAL
Visual Object Classes Challenge 2012 (VOC2012)
Results. http://www.pascal-network.org/challenges/
VOC/voc2012/workshop/index.html.
Feng, Q., Gadde, R., Liao, W., Ramon, E., and Martinez,
A. (2023). Network-free, unsupervised semantic seg-
mentation with synthetic images. In Proceedings of
the IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 23602–23610.
Goodfellow, I. J., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A., and Ben-
gio, Y. (2014). Generative adversarial networks.
Hong, S., Lee, G., Jang, W., and Kim, S. (2023). Im-
proving sample quality of diffusion models using self-
attention guidance. In Proceedings of the IEEE/CVF
International Conference on Computer Vision, pages
7462–7471.
Khani, A., Taghanaki, S. A., Sanghi, A., Amiri, A. M., and
Hamarneh, G. (2024). Slime: Segment like me.
Kingma, D. P. and Welling, M. (2022). Auto-encoding vari-
ational bayes.
Kirillov, A., Mintun, E., Ravi, N., Mao, H., Rolland, C.,
Gustafson, L., Xiao, T., Whitehead, S., Berg, A. C.,
Lo, W.-Y., Doll
´
ar, P., and Girshick, R. (2023). Seg-
ment anything.
Li, J., Li, D., Xiong, C., and Hoi, S. (2022). Blip:
Bootstrapping language-image pre-training for unified
vision-language understanding and generation.
Marcos-Manch
´
on, P., Alcover-Couso, R., SanMiguel, J. C.,
and Mart
´
ınez, J. M. (2024). Open-vocabulary atten-
tion maps with token optimization for semantic seg-
mentation in diffusion models.
Nguyen, Q., Vu, T., Tran, A., and Nguyen, K. (2023).
Dataset diffusion: Diffusion-based synthetic dataset
generation for pixel-level semantic segmentation.
Ni, M., Zhang, Y., Feng, K., Li, X., Guo, Y., and Zuo,
W. (2023). Ref-diff: Zero-shot referring image seg-
mentation with generative models. arXiv preprint
arXiv:2308.16777.
Pedregosa, F., Varoquaux, G., Gramfort, A., Michel, V.,
Thirion, B., Grisel, O., Blondel, M., Prettenhofer,
P., Weiss, R., Dubourg, V., Vanderplas, J., Passos,
A., Cournapeau, D., Brucher, M., Perrot, M., and
Duchesnay, E. (2011). Scikit-learn: Machine learning
in Python. Journal of Machine Learning Research,
12:2825–2830.
Radford, A., Kim, J. W., Hallacy, C., Ramesh, A., Goh, G.,
Agarwal, S., Sastry, G., Askell, A., Mishkin, P., Clark,
J., Krueger, G., and Sutskever, I. (2021). Learning
transferable visual models from natural language su-
pervision.
Rombach, R., Blattmann, A., Lorenz, D., Esser, P., and
Ommer, B. (2022a). High-resolution image synthe-
sis with latent diffusion models. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 10684–10695.
Beyond Labels: Self-Attention-Driven Semantic Separation Using Principal Component Clustering in Latent Diffusion Models
77
Rombach, R., Blattmann, A., Lorenz, D., Esser, P., and
Ommer, B. (2022b). High-resolution image synthe-
sis with latent diffusion models.
Saharia, C., Chan, W., Saxena, S., Li, L., Whang, J., Den-
ton, E., Ghasemipour, S. K. S., Ayan, B. K., Mahdavi,
S. S., Lopes, R. G., Salimans, T., Ho, J., Fleet, D. J.,
and Norouzi, M. (2022). Photorealistic text-to-image
diffusion models with deep language understanding.
Sun, L., Cao, J., Xie, J., Khan, F. S., and Pang, Y. (2024).
iseg: An iterative refinement-based framework for
training-free segmentation.
Tang, R., Liu, L., Pandey, A., Jiang, Z., Yang, G., Kumar,
K., Stenetorp, P., Lin, J., and Ture, F. (2022). What
the daam: Interpreting stable diffusion using cross at-
tention.
Tian, J., Aggarwal, L., Colaco, A., Kira, Z., and Gonzalez-
Franco, M. (2024). Diffuse attend and segment: Un-
supervised zero-shot segmentation using stable diffu-
sion. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
3554–3563.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, L., and Polosukhin, I.
(2023). Attention is all you need.
Wu, W., Zhao, Y., Shou, M. Z., Zhou, H., and Shen, C.
(2023). Diffumask: Synthesizing images with pixel-
level annotations for semantic segmentation using dif-
fusion models. In Proceedings of the IEEE/CVF In-
ternational Conference on Computer Vision, pages
1206–1217.
Zhou, B., Zhao, H., Puig, X., Fidler, S., Barriuso, A., and
Torralba, A. (2017). Scene parsing through ade20k
dataset. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 633–
641.
APPENDIX
Upsampling Error. The upsampling effect/error can
be computed as follows:
E
Upsample
(i, j) =
1
n
n
∑
k=1
q
(x
bilinear
(i, j, k) −x
nearest
(i, j, k))
2
∀i ∈ {1, 2, . . . , width}, ∀j ∈ {1, 2, . . . , height}
n = count of principal components
(6)
This calculation computes a pixel-wise mean of
the root squared differences of the nearest neighbor
(x
nearest
) and bilinear upsampled (x
bilinear
) principal
components. This approach faciliates a visual esti-
mation of clusters, as illustrated in Figure 10. The
upsampling effect can be leveraged for contour refine-
ment of the final masks, filtering out potential pseudo-
clusters, or identifying objects in a generated image.
Table 4: Our Method vs. SAM on the Pascal VOC valida-
tion set for semantic segmentation. The metric is the per
image averaged class-wise Iou.
Class Our Method SAM ViT-H SAM ViT-L SAM ViT-B
airplane 0.65 0.73 0.70 0.34
bicycle 0.30 0.26 0.23 0.14
bird 0.70 0.79 0.74 0.47
bottle 0.52 0.74 0.72 0.52
bus 0.79 0.85 0.85 0.49
car 0.61 0.77 0.74 0.54
cat 0.83 0.86 0.84 0.46
chair 0.52 0.56 0.53 0.40
table 0.71 0.55 0.49 0.36
dog 0.79 0.84 0.83 0.39
horse 0.70 0.65 0.60 0.20
motorbike 0.67 0.66 0.50 0.18
person 0.61 0.64 0.63 0.39
potted plant 0.42 0.44 0.42 0.30
sheep 0.73 0.64 0.63 0.50
sofa 0.80 0.67 0.62 0.43
train 0.79 0.82 0.78 0.16
monitor 0.60 0.83 0.82 0.68
all classes 0.66 0.69 0.65 0.39
16x16 32x32 64x64
Figure 10: Pixel-mean upsampling effect of individual res-
olutions of the self-attentions for the ”baby”-example.
Table 5: Our Method versus SAM on the Pascal VOC vali-
dation set for instance segmentation. The metric is the per
mask averaged class-wise IoU. The differences compared
to semantic segmentation for Pascal VOC are minimal be-
cause multiple instances of a single object are rare in this
dataset.
Class Our Method SAM ViT-H SAM ViT-L SAM ViT-B
airplane 0.62 0.73 0.70 0.34
bicycle 0.29 0.28 0.24 0.14
bird 0.69 0.84 0.74 0.47
bottle 0.48 0.81 0.72 0.52
bus 0.70 0.92 0.85 0.49
car 0.54 0.81 0.74 0.54
cat 0.81 0.89 0.84 0.46
chair 0.48 0.65 0.53 0.40
table 0.69 0.56 0.49 0.36
dog 0.77 0.88 0.83 0.39
horse 0.67 0.70 0.60 0.20
motorbike 0.63 0.68 0.50 0.18
person 0.54 0.75 0.63 0.39
potted plant 0.40 0.54 0.42 0.30
sheep 0.60 0.79 0.63 0.50
sofa 0.79 0.71 0.62 0.43
train 0.78 0.83 0.78 0.16
monitor 0.59 0.91 0.82 0.68
all classes 0.62 0.74 0.65 0.39
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
78
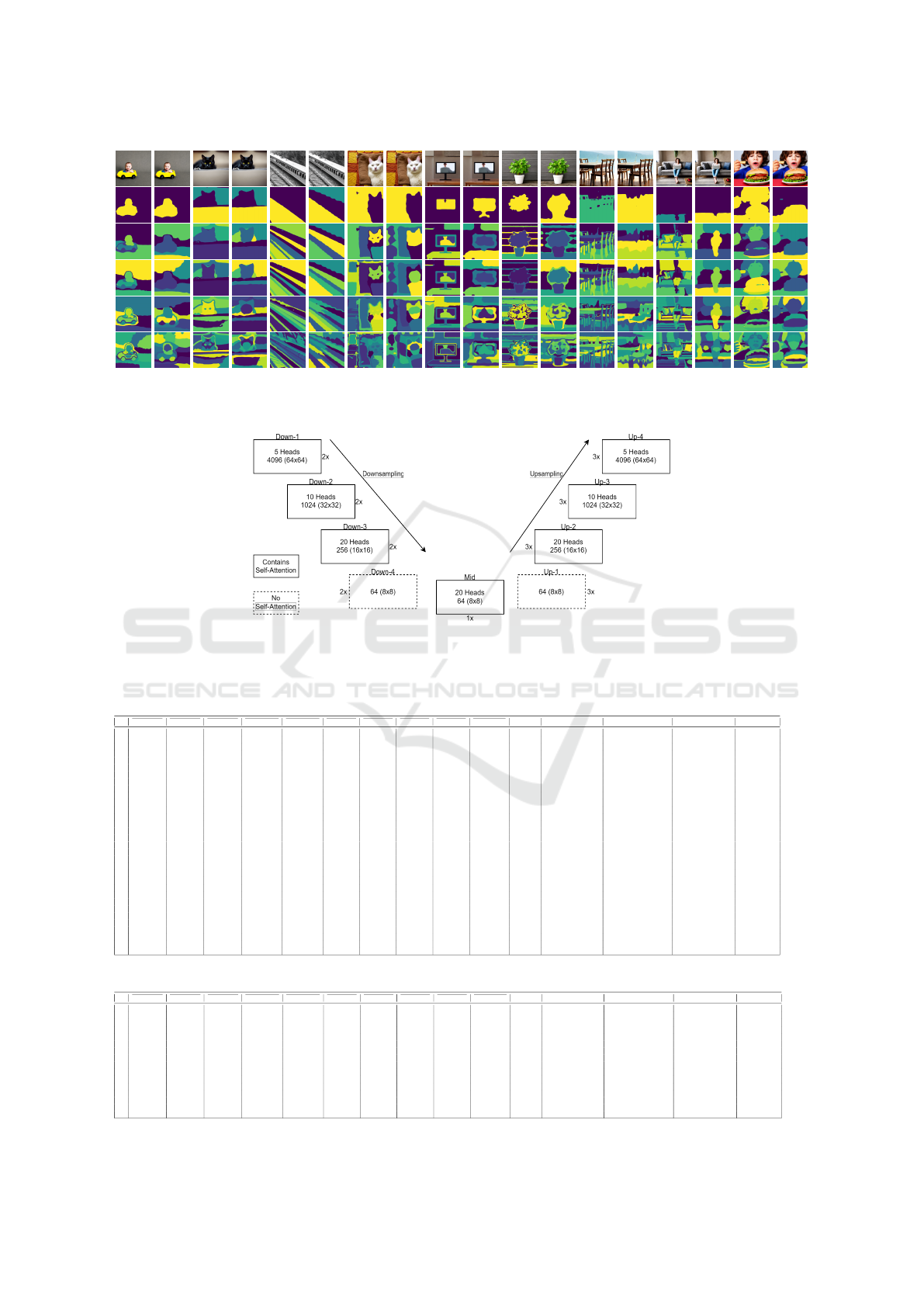
Figure 11: Examples comparing high-resolution masks from [16x16, 32x32, 64x64] attentions (left) with coarse masks from
[16x16] attentions (right). High-resolution masks capture finer details and sharper contours, while the [16x16] masks lack
precision in object boundaries, but focus more on high-level semantic meanings.
Figure 12: Positions of self-attentions in denoising U-Net in Stable Diffusion 2.1. There are six self-attention in the down
layers, one in the middle layer and 9 in the up layers, down-4 and up-1 does not contain any transformer layer.
Table 6: Parameter study on attention layers position and principal component count, only with 64x64 bilinear feature upsam-
pling.
ID SAM Top-1 SAM Top-3 SAM Top-5 SAM Top-10 SAM Top-15 M2F Top-1 M2F Top-2 M2F Top-3 M2F Top-5 M2F Top-10 Reweight Attention Resolution #Principal Components Upsample Resolution Sample Count
0 0.84 0.83 0.80 0.73 0.67 0.79 0.79 0.77 0.68 0.59 True [16, 32, 64] 64 64 50
1 0.84 0.82 0.80 0.72 0.67 0.79 0.78 0.76 0.67 0.59 True [16, 32, 64] 32 64 50
2 0.84 0.82 0.79 0.72 0.66 0.80 0.79 0.77 0.68 0.60 True [16, 32, 64] 16 64 50
3 0.84 0.82 0.80 0.72 0.67 0.79 0.78 0.76 0.68 0.60 True [16, 32, 64] 10 64 50
4 0.83 0.82 0.79 0.71 0.66 0.78 0.78 0.76 0.67 0.59 True [16, 32, 64] 8 64 50
5 0.84 0.82 0.79 0.70 0.65 0.79 0.78 0.76 0.67 0.59 True [16, 32, 64] 5 64 50
6 0.84 0.81 0.78 0.70 0.65 0.78 0.77 0.76 0.66 0.56 True [16, 32, 64] 3 64 50
7 0.82 0.80 0.76 0.67 0.62 0.77 0.76 0.74 0.65 0.54 True [16, 32, 64] 1 64 50
8 0.83 0.82 0.80 0.72 0.67 0.78 0.77 0.76 0.67 0.59 True [32, 64] 64 64 50
9 0.82 0.81 0.79 0.72 0.67 0.78 0.76 0.75 0.66 0.58 True [32, 64] 32 64 50
10 0.82 0.81 0.79 0.71 0.66 0.78 0.76 0.75 0.66 0.58 True [32, 64] 16 64 50
11 0.83 0.81 0.79 0.71 0.67 0.78 0.76 0.75 0.67 0.59 True [32, 64] 10 64 50
12 0.82 0.81 0.78 0.71 0.66 0.77 0.76 0.75 0.66 0.59 True [32, 64] 8 64 50
13 0.83 0.81 0.78 0.70 0.66 0.76 0.75 0.74 0.66 0.58 True [32, 64] 5 64 50
14 0.82 0.81 0.78 0.69 0.65 0.77 0.75 0.74 0.65 0.57 True [32, 64] 3 64 50
15 0.80 0.78 0.73 0.66 0.62 0.75 0.73 0.71 0.62 0.53 True [32, 64] 1 64 50
16 0.84 0.81 0.79 0.70 0.62 0.80 0.80 0.78 0.68 0.60 True [16, 32] 64 64 50
17 0.84 0.82 0.79 0.69 0.62 0.80 0.80 0.78 0.68 0.60 True [16, 32] 32 64 50
18 0.84 0.82 0.79 0.70 0.62 0.79 0.80 0.78 0.69 0.59 True [16, 32] 16 64 50
19 0.84 0.82 0.79 0.70 0.62 0.80 0.80 0.78 0.68 0.59 True [16, 32] 10 64 50
20 0.84 0.81 0.78 0.70 0.62 0.79 0.80 0.78 0.68 0.59 True [16, 32] 8 64 50
21 0.84 0.81 0.78 0.69 0.62 0.79 0.80 0.78 0.68 0.58 True [16, 32] 5 64 50
22 0.83 0.81 0.78 0.69 0.61 0.79 0.79 0.77 0.68 0.58 True [16, 32] 3 64 50
23 0.82 0.80 0.76 0.67 0.60 0.77 0.78 0.76 0.66 0.57 True [16, 32] 1 64 50
24 0.82 0.81 0.79 0.71 0.66 0.78 0.76 0.75 0.66 0.58 True [64] 64 64 50
25 0.82 0.80 0.79 0.71 0.66 0.77 0.76 0.74 0.65 0.58 True [64] 32 64 50
26 0.82 0.80 0.78 0.70 0.66 0.77 0.76 0.75 0.66 0.58 True [64] 16 64 50
27 0.82 0.80 0.78 0.70 0.66 0.77 0.76 0.74 0.66 0.58 True [64] 10 64 50
28 0.81 0.80 0.78 0.70 0.66 0.77 0.76 0.74 0.66 0.57 True [64] 8 64 50
29 0.81 0.79 0.77 0.69 0.65 0.76 0.75 0.74 0.65 0.56 True [64] 5 64 50
30 0.81 0.79 0.76 0.69 0.64 0.76 0.75 0.73 0.65 0.56 True [64] 3 64 50
31 0.79 0.78 0.74 0.66 0.61 0.74 0.73 0.71 0.63 0.54 True [64] 1 64 50
Table 7: Study on principal component count with 256x256 bilinear feature upsampling.
ID SAM Top-1 SAM Top-3 SAM Top-5 SAM Top-10 SAM Top-15 M2F Top-1 M2F Top-2 M2F Top-3 M2F Top-5 M2F Top-10 Reweight Attention Resolution #Principal Components Upsample Resolution Sample Count
0 0.85 0.83 0.82 0.74 0.69 0.80 0.79 0.78 0.69 0.61 True [16, 32, 64] 64 256 41
1 0.86 0.83 0.82 0.75 0.70 0.79 0.79 0.78 0.68 0.62 True [16, 32, 64] 32 256 41
2 0.84 0.83 0.82 0.74 0.69 0.79 0.78 0.77 0.69 0.63 True [16, 32, 64] 16 256 41
3 0.85 0.83 0.82 0.74 0.69 0.80 0.79 0.77 0.68 0.61 True [16, 32, 64] 10 256 41
4 0.85 0.83 0.82 0.74 0.68 0.79 0.79 0.78 0.68 0.61 True [16, 32, 64] 8 256 41
5 0.85 0.83 0.81 0.74 0.68 0.79 0.78 0.77 0.68 0.59 True [16, 32, 64] 5 256 41
6 0.84 0.82 0.81 0.73 0.68 0.78 0.77 0.76 0.67 0.60 True [16, 32, 64] 3 256 41
7 0.83 0.81 0.78 0.69 0.64 0.77 0.76 0.74 0.65 0.57 True [16, 32, 64] 1 256 41
8 0.85 0.83 0.82 0.75 0.69 0.78 0.78 0.76 0.68 0.60 True [32, 64] 64 256 41
9 0.84 0.83 0.82 0.75 0.70 0.78 0.78 0.77 0.68 0.62 True [32, 64] 32 256 41
10 0.85 0.83 0.81 0.75 0.70 0.79 0.78 0.77 0.68 0.61 True [32, 64] 16 256 41
11 0.84 0.83 0.81 0.74 0.70 0.79 0.78 0.76 0.68 0.61 True [32, 64] 10 256 41
12 0.83 0.83 0.81 0.74 0.70 0.77 0.77 0.76 0.67 0.60 True [32, 64] 8 256 41
13 0.83 0.82 0.81 0.73 0.69 0.77 0.76 0.76 0.67 0.61 True [32, 64] 5 256 41
14 0.83 0.81 0.80 0.73 0.68 0.76 0.76 0.75 0.66 0.60 True [32, 64] 3 256 41
15 0.80 0.79 0.76 0.68 0.64 0.74 0.73 0.72 0.63 0.56 True [32, 64] 1 256 41
Beyond Labels: Self-Attention-Driven Semantic Separation Using Principal Component Clustering in Latent Diffusion Models
79

Table 8: Incorporating middle self-attention and study on reweighting and layer positions (like Table 2), evaluated by the
average of the top scores over multiple samples (in average IoU). [8,16,32,64] self-attention layers were used with 3 principal
components, feature bilinear upsampling resolution to 64 and additionally middle block is incorporated.
ID Reweight Layer SAM Top 1 SAM Top 3 SAM Top 5 M2F Top-1 M2F Top-3 M2F Top-5
0 True down+mid 0.80 0.78 0.75 0.75 0.73 0.64
1 True up+mid 0.84 0.82 0.79 0.79 0.77 0.67
2 True all+mid 0.84 0.82 0.79 0.79 0.76 0.67
3 False down+mid 0.83 0.81 0.78 0.79 0.77 0.67
4 False up+mid 0.85 0.82 0.79 0.80 0.78 0.68
5 False all+mid 0.84 0.83 0.80 0.80 0.78 0.68
Figure 13: Comparison of segmentation performance be-
tween SAM models and our method on the Pascal VOC val-
idation set.
Figure 14: Visualization of the self-attentions from the
mid-block for the ”baby”-example presented in Section 3.
No distinct clusters are noticeable when mapping the three
main components to RGB-values.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
80
