
Low Latency Pedestrian Detection Based on Dynamic Vision Sensor and
RGB Camera Fusion
Bingyu Huang
a
, Gianni Allebosch
b
, Peter Veelaert
c
, Tim Willems
d
, Wilfried Philips
e
and Jan Aelterman
f
TELIN-IPI, Ghent University, Sint-Pietersnieuwstraat, Ghent, Belgium
{bingyu.huang, gianni.allebosch, peter.veelaert, tim.willems, wilfried.philips, jan.aelterman}@ugent.be
Keywords:
Dynamic Vision Sensor, Motion Segmentation, Sensor Fusion, Autonomous Driving.
Abstract:
Advanced driver assistance systems currently adopt RGB cameras as visual perception sensors, which rely
primarily on static features and are limited in capturing dynamic changes due to fixed frame rates and mo-
tion blur. A very promising sensor alternative is the dynamic vision sensor(DVS) with microsecond temporal
resolution that records an asynchronous stream of per-pixel brightness changes, also known as event stream.
However, in autonomous driving scenarios, it’s challenging to distinguish between events caused by the ve-
hicle’s motion and events caused by actual moving objects in the environment. To address this, we design a
motion segmentation algorithm based on epipolar geometry and apply it to DVS data, effectively removing
static background events and focusing solely on dynamic objects. Furthermore, we propose a system that
fuses the dynamic information captured by event cameras and rich appearance details from RGB cameras.
Experiments show that our proposed method can effectively improve detection performance while showing
great potential in decision latency.
1 INTRODUCTION
Autonomous driving systems rely on robust and reli-
able perception mechanisms to ensure safety and ef-
ficiency in dynamic environments. Motion segmen-
tation, the process of identifying and isolating mov-
ing objects within a scene, is a critical component
of visual perception (Kulchandani and Dangarwala,
2015). Segmenting a moving foreground against a
static background is a relatively easy task for event
cameras thanks to its dynamic response characteristic
and edge-like output (Schraml et al., 2010). Moving
objects in autonomous driving scenarios is more chal-
lenging due to the more disturbing changing back-
ground. To counteract the interference of changing
background pixels, approaches such as optical flow
analysis (Kim and Kwon, 2015), motion clustering
(Kim et al., 2010), and neural networks (Mane and
Mangale, 2018) are introduced to characterize the dif-
a
https://orcid.org/0000-0003-0258-2684
b
https://orcid.org/0000-0003-2502-3746
c
https://orcid.org/0000-0003-4746-9087
d
https://orcid.org/0000-0002-5264-919X
e
https://orcid.org/0000-0003-4456-4353
f
https://orcid.org/0000-0002-5543-2631
ference between foreground and background. These
methods all develop high-dimensional feature repre-
sentations for backgrounds or targets and are robust
to general scenarios. The disadvantage is that con-
centrated features rely on prior dataset training and
reduce accuracy in the detection under occlusion or
under/over exposure. Another limitation of traditional
cameras is their inherent frame-based nature, which
can lead to latency issues (Narasimhan and Nayar,
2003; Zhu et al., 2020; Chang et al., 2021), partic-
ularly in scenarios requiring rapid decision-making.
In contrast, Dynamic Vision Sensors (DVS), or
event cameras, capturing per-pixel brightness changes
asynchronously with microsecond temporal resolu-
tion (Brandli et al., 2014; Taverni et al., 2018; Gal-
lego et al., 2020). This technology inherently pro-
vides a high temporal resolution that can significantly
reduce latency and enhance responsiveness in time-
critical scenarios. Event cameras are particularly ad-
vantageous in situations with low lighting conditions
or rapid motion.
However, in autonomous driving scenarios, it is
challenging to distinguish between events caused by
the vehicle’s ego-motion and events caused by actual
moving objects in the environment, such as pedestri-
Huang, B., Allebosch, G., Veelaert, P., Willems, T., Philips, W. and Aelterman, J.
Low Latency Pedestrian Detection Based on Dynamic Vision Sensor and RGB Camera Fusion.
DOI: 10.5220/0013126600003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 2: VISAPP, pages
841-850
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
841

ans, cyclists, or other vehicles. This difficulty arises
because the vehicle’s motion induces a large num-
ber of events from static objects, like buildings, road
signs, and trees, making it harder to identify and iso-
late meaningful events generated by truly dynamic
elements in the scene. Properly filtering out these
motion-induced events while retaining the relevant
ones is crucial for ensuring reliable and accurate per-
ception in fast-changing driving environments.
To address these challenges, we propose an epipo-
lar geometry-based method to remove events trig-
gered by static background objects. We further make
use of the data from DVS to complement dynamic
information for RGB detections and achieve a faster
detection response. In summary, the contributions of
this paper are:
• We introduce a novel motion segmentation algo-
rithm for DVS employing the epipolar geometry
principle.
• We propose a fusion method that makes use
of motion information from DVS and appear-
ance characteristics from RGB to accomplish low-
latency detection.
2 RELATED WORK
2.1 Motion Segmentation on DVS
Event-based vision, particularly utilizing Dynamic
Vision Sensors, has emerged as a transformative ap-
proach in computer vision, offering high temporal
resolution and low latency, which are crucial for
time-critical scenarios, such as autonomous driving,
robotics, and industrial automation. Research in
this domain can be broadly divided into two main
methodologies: ego-motion compensation and neu-
ral network-based approaches. Ego-motion compen-
sation focuses on deriving motion trajectories, opti-
cal flow, and other geometric properties directly from
the event streams. By estimating the ego-motion, it’s
possible to predict the expected change in brightness
at each pixel due to the vehicle’s motion and sub-
tract this from the DVS data (Stoffregen et al., 2019;
Zhou et al., 2021; Parameshwara et al., 2020; Mishra
et al., 2017). In contrast, neural network-based ap-
proaches harness the capabilities of deep learning
to process complex, sparse, and asynchronous data
from DVS. These techniques enable the extraction
and segmentation of motion directly from raw event
streams using various types of neural networks, in-
cluding spiking neural networks (Parameshwara et al.,
2021), graph neural networks (Mitrokhin et al., 2020;
Alkendi et al., 2024), and recurrent neural networks
(Zhang et al., 2023).
2.2 Fusion of RGB and DVS for Object
Detection
Fusion of RGB images with Dynamic Vision Sensor
(DVS) data has become a prominent approach for en-
hancing object detection, particularly in challenging
environments such as low-light conditions (Liu et al.,
2023) or scenes with rapid motion (Gehrig and Scara-
muzza, 2024). Since event data and RGB data are
fundamentally different in nature, most of the meth-
ods adopt deep learning models to learn features from
multi-modal data. A common approach involves us-
ing separate convolutional neural networks (CNNs)
to extract features and combine them in deeper lay-
ers (Zhou et al., 2023; Tomy et al., 2022). Some
researchers introduce novel architectures to improve
performance, such as the attention mechanism (Cao
et al., 2021; Cho and Yoon, 2022), temporal and re-
current networks (Wan et al., 2023; Hamaguchi et al.,
2023), and spiking neural network(SNN) (Cao et al.,
2024).
3 METHODOLOGY
Our method is inspired by a geometric-based tech-
nique (Allebosch et al., 2023) designed to distinguish
static backgrounds from true motion, using a linear
array of RGB cameras on a moving vehicle. We gen-
eralize the technique to asynchronous streams from
DVS, enabling lower-latency detection. In the follow-
ing sections, we outline the fundamental principles of
DVS, discuss the motion segmentation challenges we
aim to address and introduce our proposed solution.
3.1 Background Removal on DVS
3.1.1 Working Principle of DVS
DVS operates by asynchronously detecting changes
in brightness at individual pixels. Let I(t, x) denote
the intensity of light at time t, where x = (x, y) is the
pixel location. DVS responds to changes in the loga-
rithm of the intensity,
L(t, x) = log I(t, x). (1)
Each pixel sensor continuously monitors the
change in L(t, x) over time. An event is triggered
when the change in logarithmic intensity exceeds a
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
842
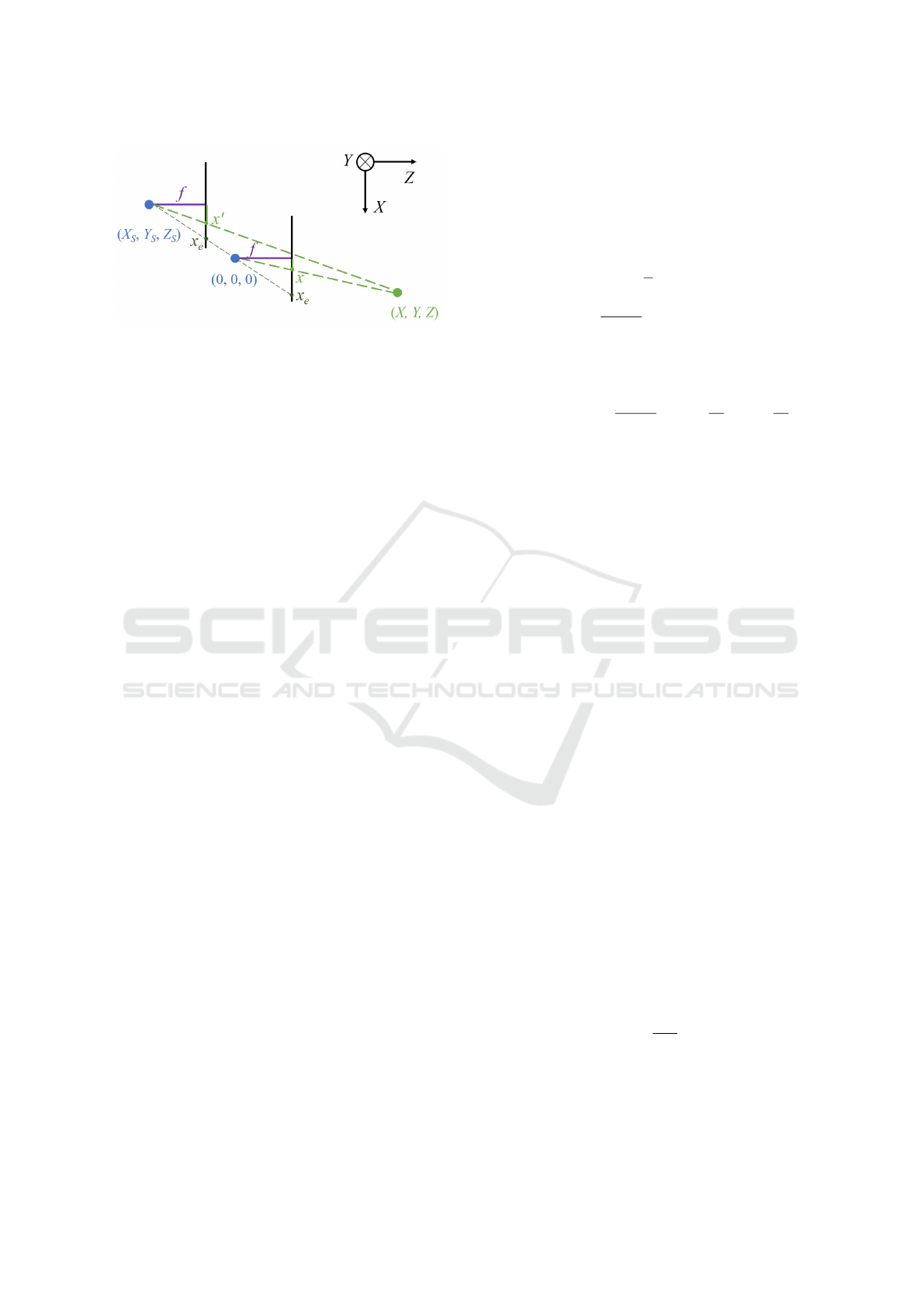
Figure 1: Camera configuration of our method. A pair of
cameras observes a static object located at (X,Y, Z). The
reference camera at current timestamp and the side camera
at past timestamp are at positions (0,0,0), (X
S
,Y
S
, Z
S
). f is
the focal length.
predefined threshold C. Specifically, an event is gen-
erated at pixel x and time t
k
if
|
L(t
k
, x) − L(t
k
− ∆t
k
, x)
|
≥ C. (2)
When an event is triggered at pixel location x
k
=
(x
k
, y
k
) , it is represented as
e
k
= (x
k
,t
k
, p
k
), (3)
where t
k
is the timestamp of the event, and p
k
is the
polarity of the event, indicating whether the bright-
ness increased or decreased,
p
k
=
(
+1 if L(t
k
, x
k
) − L(t
k
− ∆t
k
, x
k
) ≥ C
−1 if L(t
k
, x
k
) − L(t
k
− ∆t
k
, x
k
) ≤ −C.
(4)
Hence a static DVS is inherently sensitive to mo-
tion in the scene. It ignores static objects or back-
grounds because they do not cause any change in
brightness. This property is particularly useful in ap-
plications where detecting motion is the primary goal,
such as surveillance (Bolten et al., 2019), object track-
ing (Borer et al., 2017), or motion analysis (Xu et al.,
2020), as it reduces the amount of data that needs to
be processed by focusing only on areas with motion.
When a DVS is mounted on a moving vehicle, the
situation becomes more complex. The ego-motion of
the vehicle will cause the entire field of view to shift,
and this will generate a large number of events across
the sensor. A key challenge in this scenario is to dif-
ferentiate between events caused by the motion of the
vehicle (global motion) and those caused by indepen-
dent motion within the scene (e.g., a pedestrian cross-
ing the street).
3.1.2 Epipolar Geometry Principle
We will now show how it is possible to identify DVS
events that are triggered by static background through
epipolar geometry principles. Given the assumption
that the vehicle is driving in a straight line at a con-
stant speed during the period, with no vertical dis-
placement of the vehicle, the overview of the geomet-
ric calculation model is shown in Figure 1.
The projection (x, y) on image plane of reference
camera and side camera are denoted as follows,
(x, y) =
f
Z
(X,Y ), (5)
(x
′
, y
′
) =
f
Z − Z
S
(X −X
S
,Y −Y
S
). (6)
For a static object locates at (X ,Y, Z), the disparity
between projection x on the reference camera and the
projection x
′
on the side camera is
(∆
static,x
, ∆
static,y
) =
f
Z − Z
S
(X
S
− X
Z
S
Z
,Y
S
−Y
Z
S
Z
).
(7)
Except for depth Z, the variables in disparity vec-
tor (∆
static,x
, ∆
static,y
) can be obtained through camera
configuration. X
S
and Y
S
are the horizontal and ver-
tical setup distances between two cameras. Note that
Y
S
= 0 because the cameras are set on the same level.
Z
S
is the driving distance. We assume the camera pair
is mounted on a moving vehicle driving at speed v,
and the driving distance is
Z
S
= v∆t, (8)
where ∆t is the time interval between the reference
camera at the current timestamp and the side camera
at the past timestamp. We note that the driving speed
doesn’t have to be constant, only the vehicle displace-
ment needs to be known.
Object depth can be obtained by several potential
approaches, such as inferring object depth from DVS
data by neural network model (Hidalgo-Carri
´
o et al.,
2020), or speculating from stereo vision (Ghosh and
Gallego, 2022). In this paper, we use separate depth
sensors, which are fast and suitable for real-time pro-
cessing. It is shown in (Allebosch et al., 2023) that
even sparse depth information can already provide
tight uncertainty bounds for disparity analysis. We
also refer to this work for an in-depth description of
the relation between depth accuracy and disparity.
When we review expression 7, substituting Z
s
for
v∆t (eq 8) , the only value that is still unknown for the
right-hand side of the equation is ∆t. Therefore, we
can determine the specific time interval for which the
disparity along the x-direction is 0. Let ∆
static,x
= 0
and we get the desired time interval,
∆t = −
f X
S
xv
. (9)
The projections of two cameras that satisfy the above
condition are located at the intersection of the com-
mon line of sight and image plane. We denote these
special locations as epipoles x
e
in Figure 1.
Low Latency Pedestrian Detection Based on Dynamic Vision Sensor and RGB Camera Fusion
843

The epipolar geometry principle reveals that a
static object observed by current reference camera is
also observed by the side camera at ∆t before. If not,
it means the visual information is triggered by moving
objects. We can therefore distinguish moving pedes-
trians with static backgrounds in the event stream.
3.1.3 Event Frame Representation
In this paper, we employ the event frame (Perot et al.,
2020; Gehrig et al., 2019) as event representation in-
stead of a single event. Theoretically, when we accept
an event from the reference camera, we can search
for matching point in the side camera by the epipo-
lar geometry principle and judge if it is triggered
by a moving object. The challenge is that with sin-
gle events, slight deviations in time and location can
cause significant errors in the computation of match-
ing epipoles, leading to mismatches in feature cor-
respondence, since DVS is highly sensitive to small
changes in lighting, noise, and other environmental
factors. Another disturbance is that even if there is
no change in light intensity, there will be event out-
put due to thermal noise and junction leakage current
(Feng et al., 2020).
Another consideration is real-time performance.
In real-time applications like autonomous driving,
drones, or augmented reality, processing individual
events can lead to significant computational overhead
and delay. By using event frames, we can balance
the need for temporal resolution and real-time perfor-
mance because event frames can be processed more
efficiently than streams of single events.
As shown in Figure 2a, we visually compare dif-
ferent temporal widths that can be used to create the
event frame representation. We zoom in on the left
bottom area (left leg of the pedestrian) and compare
the distribution of the events in each temporal win-
dow. When the window size is 1 ms, the event distri-
butions on the image plane are not consistent in two
consecutive temporal windows. Since epipolar geom-
etry relies on matching points across views, incon-
sistency of triggered events and transient noise could
mislead the estimation of corresponding points be-
tween cameras. When we expand the window width
to 2ms, the event distribution on the image plane is
more stable and better for epipolar geometry analysis.
Figure 2b shows more visualizations of different tem-
poral window sizes. As the window width extends,
the contour of the pedestrian is more clear. Smaller
windows provide faster response times but may cap-
ture fewer details, while larger windows enhance fea-
ture clarity by accumulating more events, though at
the cost of slower responses. On the other hand, large
wide window sizes may cause overcrowding of events
and overlap between edges. In the 12ms temporal
window visualization, the pedestrian’s ankle begins to
blur due to its faster motion compared to other body
areas, causing a higher event density in that region.
The temporal width is a hyperparameter that can be
tuned according to the driving speed. In this paper,
we set the temporal window size as 8ms.
To build an event frame, we aggregate the events
at each pixel in the time interval centered around t,
with a window width ∆t
w
. The set of events on the
image plane in the time window is E = {e
k
}
N
e
k=1
, N
e
is
the number of events in the time window. We define
the event frame as a 2D grid that stores the accumu-
lation of the events at each pixel x(with coordinates
(x, y)) in the time window. Formally, the event ac-
cumulation at each pixel in the event frame can be
expressed as
F(x,t) =
∑
n
k|x
k
=x,t
k
∈
[
t−
∆t
w
2
,t+
∆t
w
2
]
o
p
k
. (10)
3.1.4 Background Removal
Once the event frame is constructed, we apply epipo-
lar geometry to match corresponding points between
different camera views. For each pixel location x=
(x, y) where there is event accumulation F
re f
(t, x) in
the current event frame of the reference camera, we
retrieve the corresponding matching point F
side
(t +
∆t, x) from the side camera at time t + ∆t. The dif-
ference D(t, x) is
D(t, x) = F
re f
(t, x) − F
side
(t + ∆t, x). (11)
To classify the event as either being caused by the
background or by a moving object, we use a thresh-
old τ to determine whether the event is from the back-
ground or a moving object. In this paper, we define
pixels where preserved events accumulate as active
pixels, the indicator function is
A(t, x) =
(
1, if |D(t, x)| ≥ τ
0, if |D(t, x)| < τ.
(12)
The difference threshold τ can be tuned according to
the event density. In this paper, we set τ =1.
Figure 3 shows the background removal result of
examples with event frames. The part with limited
disparity is removed, and the moving pedestrians are
preserved. Due to camera jitter and measurement er-
rors, there is still a small amount of residual back-
ground. In the next section, we will introduce an intu-
itive and effective fusion method to further make use
of the amount of filtered versus non-filtered events.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
844
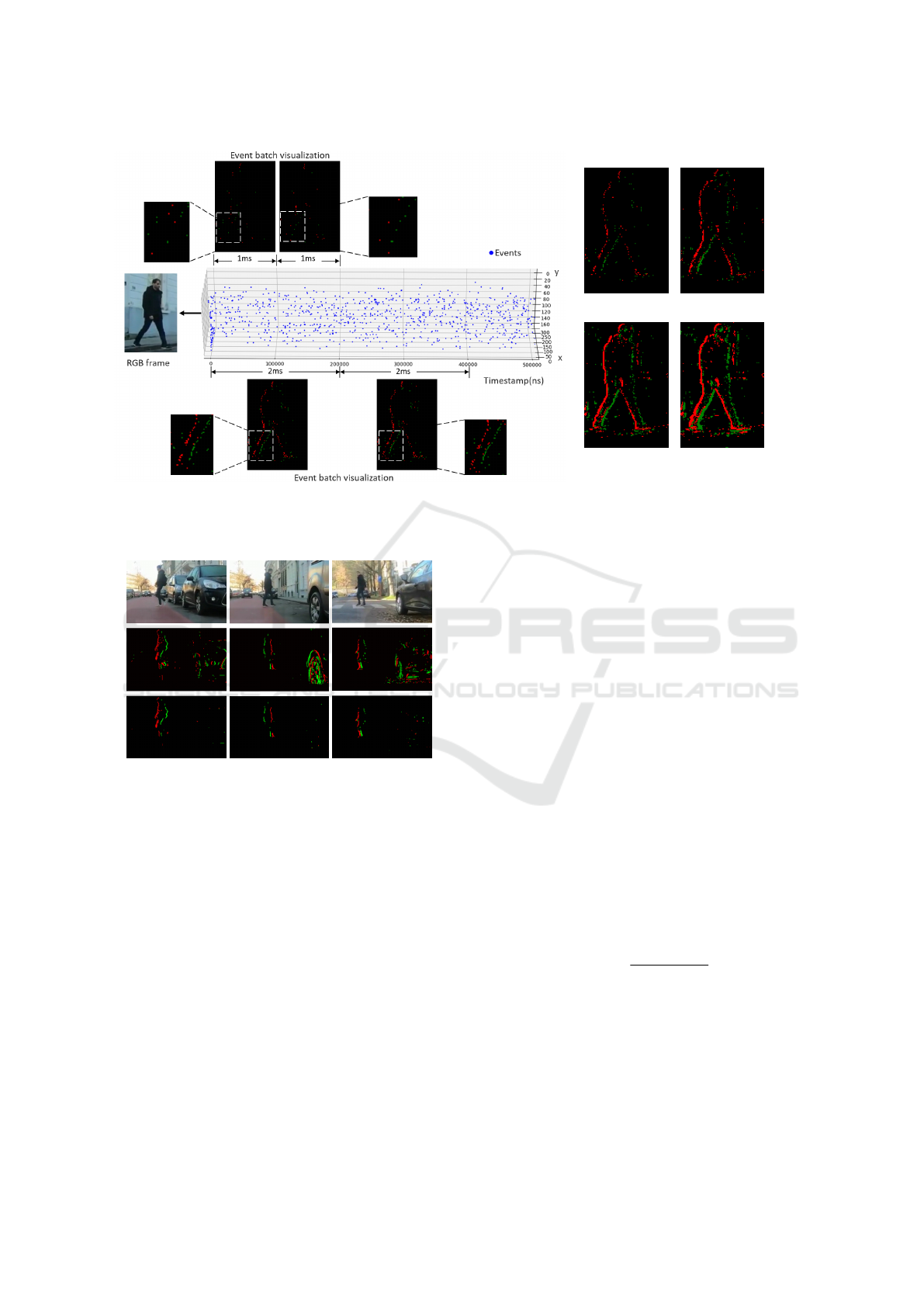
(a) Visualization of events in temporal window.
2ms 4ms.
8ms 12ms.
(B) comparison of different temporal
window size.
Figure 2: Visualization of event data in different temporal widths. The green and red pixels represent positive and negative
polarity respectively.
Figure 3: The first row is the image frame from the RGB
camera; the second row is the corresponding event frame.
The bottom row is the result of background removal by our
proposed method.
3.2 Detection Fusion of RGB Frames
and DVS Data
In the previous section, we explain how we removed
static background on event frames and kept dynamic
information, which is complementary to extracting in-
formation from RGB cameras. Detectors based on
RGB image frames rely on features like texture and
visible contrast structure, which are inherently static.
Hence, an object looks roughly the same whether it
is moving or not. Common object detection meth-
ods are divided into two major categories: traditional
methods that combine feature extraction with classi-
fiers (Viola and Jones, 2001; Dalal and Triggs, 2005;
Felzenszwalb et al., 2009), and deep learning meth-
ods that use neural network models (Girshick et al.,
2014; Redmon, 2016; Lin, 2017; Zhao et al., 2024).
In this paper, we consider an example of a neural net-
work model as the RGB detector, which generates
bounding boxes with confidence scores as detection
output. We define a bounding box B as a rectangular
area bounded by a set of pixel coordinates, with an
associated scalar confidence score C
b
.
A common approach for selecting target bound-
ing boxes is to set a confidence threshold and pick up
boxes that meet or exceed this threshold. As shown
in Figure 4, if a pedestrian appears suddenly behind
cars, single confidence level based judgment would
lose early detections due to low confidence scores
in these scenarios. In this case, the background re-
moval result from the DVS can provide complemen-
tary information for the bounding boxes, distinguish-
ing early-appearing pedestrians from misdetections in
low-confidence bounding boxes C
b
.
Specifically, we define the active pixel percentage
for each bounding box B as
P
a
(B) =
∑
x∈B
A(t, x)
∑
x∈B
F (t, x)
, (13)
where F (t, x) is an indicator function that judges if
events accumulate at the pixel x,
F (t, x) =
(
1, if |F(t, x)| > 0
0, if |F(t, x)| = 0.
(14)
By calculating the active pixel percentage of a
bounding box, we can further determine whether the
Low Latency Pedestrian Detection Based on Dynamic Vision Sensor and RGB Camera Fusion
845

Figure 4: Illustration of proposed fusion method. Our algorithm designed for event stream to remove static background is
introduced in Section 3.1.
bounding box comes from a static or dynamic object.
We proposed a straightforward and efficient fusion
strategy. We set a low confidence threshold T
c,l
and
a high confidence threshold T
c,h
for the confidence
score C
b
. There are three possibilities for RGB de-
tection results:
1) C
b
≥T
c,h
: This signifies that RGB detectors as-
sign a conclusive confidence score, suggesting a high
probability of a person being present. We retain this
candidate in the final set of detections, with minimal
risk of false positives.
2) C
b
< T
c,l
: This indicates a very low detection
score. We assume a negligible likelihood of a person
being present and exclude the candidate from the final
detections.
3) T
c,l
≤C
b
< T
c,h
: These bounding boxes have a
medium detection score, signaling no clear preference
to either keep or discard it as a detection. Therefore,
this range benefits the most from our epipolar geome-
try based detection on event frame. If the active pixel
percentage in the bounding box P
a
(B) is higher than
a threshold T
a
, it’s more likely that there is a crossing
person and we keep the candidate.
By making full use of candidate bounding boxes,
our proposed fusion method is able to boost the early
detection performance for moving pedestrian detec-
tion. In the next section, we evaluate both detection
performance and latency on a custom dataset.
3.3 Experimental Evaluation
When a pedestrian first appears from behind an oc-
clusion, only a small portion of their body is visible,
making it difficult for detectors to recognize them.
RGB detectors based on neural networks often assign
a low confidence score in such situations. We set up
an experiment to demonstrate that our fusion method
can differentiate between bounding boxes coming
from early-emerging pedestrians and those caused by
background misdetections. Hence, our method can
detect pedestrians earlier and provide more reaction
time for the drivers to avoid collisions.
3.3.1 Custom Dataset
We designed a platform with three Go Pro Hero 7
cameras mounted on an electric cargo bicycle. The
side cameras are set up beside the center camera per-
pendicular to the driving direction with an equal dis-
tance. In addition, radar is also equipped to record
driving speed and obtain object depth. The vehicle
was driving on a straight road in the city center. Two
experimenters crossed the road in front of the vehicle
individually or together, and the obtained videos were
captured into 21 sequences. The recorded RGB se-
quences are converted into event data using DVS sim-
ulator ESIM (Rebecq et al., 2018) with default simu-
lation settings.
To measure the reaction time (latency) between
the first visible instance and the first detection,
we manually initialize the first visible annotation
of pedestrians, followed by semi-automatic inter-
val tracking using SSD (Liu et al., 2016)and DSST
(Danelljan et al., 2016), which would be manually
corrected when necessary. Our evaluation comprises
18,982 annotation boxes and 33,123 frames. We
choose Yolo v4 (Wang et al., 2021) as the detector
for RGB cameras and use the original structure and
pre-trained weights. In this paper we focus only on
detecting objects in the ‘person’ class.
In section 3.2, we introduce the fusion method,
which uses three parameters: T
c,h
, T
c,l
and T
a
.
We define a range of values for each parame-
ter and evaluate all possible combinations: T
c,h
∈
{0.5, 0.7, 0.8, 0.9}, T
c,l
∈ {0.1, 0.2, 0.3, 0.5}, T
a
∈
{0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7, 0.8, 0.9}. For each
combination, we evaluate the performance by three
metrics, precision, recall, and latency. We select the
best points from the Pareto front (Ngatchou et al.,
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
846

2005), optimized using the F1 score. The Precision-
Recall curve and Precision-Latency curve to compare
the detection performance and latency are shown in
Figure 5.
3.3.2 Result
Table 1: Performance of Yolov4 detector and fusion
method.
Method F1
max
MAP average latency(ms)
Yolo v4 88.35 90.49 375.65
Fusion 89.28 91.59 328.09
(a) Precision-Recall curve. (b) Precision-Latency curve.
Figure 5: Comparative analysis of the Yolo v4 detector and
our proposed fusion method.
Latency. We define the detection latency as the re-
action time between the first annotation and the first
detection. Figure 6 shows how the fusion method re-
duces latency by leveraging motion information from
event data. By analyzing the active pixel percentage
in bounding boxes with low confidence scores, we
can distinguish the early appearance of moving pedes-
trians from false detections. The Precision-Latency
curve Figure 5b demonstrates that the fusion method
maintains high precision while reducing detection la-
tency by an average of 76.72 milliseconds. Figure 7
shows several examples of gain in reaction time and
distance by our proposed fusion method.
Detection Performance. The Precision-Recall curve
Figure 5a illustrates that the fusion method achieves
an average increase of 2.05% in recall at equivalent
precision levels. It means that, for the same number of
false positive detections, our fusion method can detect
actual pedestrians more often. Setting the precision
threshold at 95%, the fusion method shows a 1.05%
higher recall and an average latency gain of 58.23 ms.
These results suggest that the fusion method is more
efficient, providing accurate detections with reduced
response times. Table 1 shows that our proposed fu-
sion method improves MAP by 1.10% while the re-
sponse is 47.56 ms faster than Yolo v4 detector on
average.
3.4 Discussion
The results demonstrate that our proposed fusion ap-
proach of using DVS data, filtered by epipolar ge-
ometry, combined with RGB-based detections signif-
icantly improves pedestrian detection in autonomous
driving scenarios. By eliminating static background
events, our method enables more accurate and fo-
cused detection of dynamic objects, such as pedestri-
ans, even in challenging environments with complex
backgrounds.
One key advantage of our approach lies in the
use of epipolar geometry to filter out irrelevant events
generated by static objects, allowing the system to fo-
cus on truly dynamic elements in the scene. The fu-
sion with RGB data further complements the system
by leveraging the rich spatial and appearance informa-
tion from the RGB frames, ensuring that both static
and dynamic visual cues are effectively utilized.
Compared to previous methods that rely solely on
RGB or DVS data, our approach offers significant im-
provements in terms of detection latency and accu-
racy. The ability to detect pedestrians earlier, even
when partially occluded or moving quickly, makes
our method particularly suitable for real-time applica-
tions in autonomous driving. Nevertheless, real-world
testing and further refinement are needed to fully val-
idate the system’s robustness across different driving
conditions.
4 CONCLUSION AND FUTURE
WORK
In this paper, we presented a novel fusion algo-
rithm that integrates DVS data with RGB camera
detections for improved pedestrian detection in au-
tonomous driving scenarios. By applying epipolar ge-
ometry to remove static background events from the
DVS data, we significantly enabled the system to fo-
cus on dynamic objects. The proposed fusion of the
high temporal resolution of DVS with the rich spa-
tial detail of the RGB cameras brings faster and more
accurate detection, particularly in low-light and fast-
moving environments.
Our method demonstrates strong potential for re-
ducing detection latency and improving performance
in real-time perception systems, especially in safety-
critical applications such as autonomous vehicles. By
combining the complementary strengths of both sen-
sor modalities, our system addresses the limitations
faced by traditional camera-based detection methods.
Looking forward, several areas require further ex-
ploration and refinement. First, we plan to extend our
Low Latency Pedestrian Detection Based on Dynamic Vision Sensor and RGB Camera Fusion
847

Figure 6: Detection latency of proposed fusion method and Yolo v4. Traditional RGB-based detector tend to give a low
confidence score on suddenly appearing pedestrian at the early moment until the pedestrian is sufficiently visible. The fusion
method is able to detect a pedestrian ealier while Yolo takes much time to recognize an occluded pedestrian. In the shown
scenario, the vehicle is driving at the speed of 2.80 m/s and our proposed fusion method detects the pedestrian 258.59 ms
earlier than Yolov4, referring to a gain in distance of 0.72m for driver to avoid the collision.
Figure 7: Detection result of low-latency fusion. The first column is the first detection of the fusion method and the last
column is the first detection of YOLO v4 detector. The second and third columns are the raw event frame and the background
removal result by our proposed method. The confidence score is shown above bboxes. The confidence score threshold for
Yolo v4 to accept a detection is 0.8.
research by testing the system on real-world event
data, addressing potential challenges such as sen-
sor noise and environmental variability. Our future
work will also focus on optimizing the algorithm for
edge processing devices, enabling it to be deployed in
resource-constrained environments such as embedded
systems in autonomous vehicles.
By continuing to refine and validate the proposed
method in real-world conditions, we aim to develop
a robust, efficient, and reliable solution for pedestrian
detection and other object detection tasks in dynamic
environments. In future work, we will study more di-
verse and complex traffic scenarios.
REFERENCES
Alkendi, Y., Azzam, R., Javed, S., Seneviratne, L., and
Zweiri, Y. (2024). Neuromorphic vision-based motion
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
848

segmentation with graph transformer neural network.
arXiv preprint arXiv:2404.10940.
Allebosch, G., Van Hamme, D., Veelaert, P., and Philips,
W. (2023). Efficient detection of crossing pedestrians
from a moving vehicle with an array of cameras. Op-
tical Engineering, 62(3):031210–031210.
Bolten, T., Pohle-Fr
¨
ohlich, R., and T
¨
onnies, K. D. (2019).
Application of hierarchical clustering for object track-
ing with a dynamic vision sensor. In Computational
Science–ICCS 2019: 19th International Conference,
Faro, Portugal, June 12–14, 2019, Proceedings, Part
V 19, pages 164–176. Springer.
Borer, D., Delbruck, T., and R
¨
osgen, T. (2017). Three-
dimensional particle tracking velocimetry using dy-
namic vision sensors. Experiments in Fluids, 58:1–7.
Brandli, C., Berner, R., Yang, M., Liu, S.-C., and Delbruck,
T. (2014). A 240× 180 130 db 3 µs latency global
shutter spatiotemporal vision sensor. IEEE Journal of
Solid-State Circuits, 49(10):2333–2341.
Cao, H., Chen, G., Xia, J., Zhuang, G., and Knoll, A.
(2021). Fusion-based feature attention gate compo-
nent for vehicle detection based on event camera.
IEEE Sensors Journal, 21(21):24540–24548.
Cao, J., Zheng, X., Lyu, Y., Wang, J., Xu, R., and Wang, L.
(2024). Chasing day and night: Towards robust and
efficient all-day object detection guided by an event
camera. In 2024 IEEE International Conference on
Robotics and Automation (ICRA), pages 9026–9032.
IEEE.
Chang, M., Feng, H., Xu, Z., and Li, Q. (2021). Low-light
image restoration with short-and long-exposure raw
pairs. IEEE Transactions on Multimedia, 24:702–714.
Cho, H. and Yoon, K.-J. (2022). Event-image fusion stereo
using cross-modality feature propagation. In Proceed-
ings of the AAAI Conference on Artificial Intelligence,
volume 36, pages 454–462.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In 2005 IEEE com-
puter society conference on computer vision and pat-
tern recognition (CVPR’05), volume 1, pages 886–
893. Ieee.
Danelljan, M., H
¨
ager, G., Khan, F. S., and Felsberg, M.
(2016). Discriminative scale space tracking. IEEE
transactions on pattern analysis and machine intelli-
gence, 39(8):1561–1575.
Felzenszwalb, P. F., Girshick, R. B., McAllester, D., and
Ramanan, D. (2009). Object detection with discrim-
inatively trained part-based models. IEEE transac-
tions on pattern analysis and machine intelligence,
32(9):1627–1645.
Feng, Y., Lv, H., Liu, H., Zhang, Y., Xiao, Y., and Han,
C. (2020). Event density based denoising method for
dynamic vision sensor. Applied Sciences, 10(6):2024.
Gallego, G., Delbr
¨
uck, T., Orchard, G., Bartolozzi, C.,
Taba, B., Censi, A., Leutenegger, S., Davison, A. J.,
Conradt, J., Daniilidis, K., et al. (2020). Event-based
vision: A survey. IEEE transactions on pattern anal-
ysis and machine intelligence, 44(1):154–180.
Gehrig, D., Loquercio, A., Derpanis, K. G., and Scara-
muzza, D. (2019). End-to-end learning of represen-
tations for asynchronous event-based data. In Pro-
ceedings of the IEEE/CVF International Conference
on Computer Vision, pages 5633–5643.
Gehrig, D. and Scaramuzza, D. (2024). Low-latency
automotive vision with event cameras. Nature,
629(8014):1034–1040.
Ghosh, S. and Gallego, G. (2022). Multi-event-camera
depth estimation and outlier rejection by refo-
cused events fusion. Advanced Intelligent Systems,
4(12):2200221.
Girshick, R., Donahue, J., Darrell, T., and Malik, J. (2014).
Rich feature hierarchies for accurate object detec-
tion and semantic segmentation. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 580–587.
Hamaguchi, R., Furukawa, Y., Onishi, M., and Sakurada,
K. (2023). Hierarchical neural memory network for
low latency event processing. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 22867–22876.
Hidalgo-Carri
´
o, J., Gehrig, D., and Scaramuzza, D. (2020).
Learning monocular dense depth from events. In 2020
International Conference on 3D Vision (3DV), pages
534–542. IEEE.
Kim, D.-S. and Kwon, J. (2015). Moving object detec-
tion on a vehicle mounted back-up camera. Sensors,
16(1):23.
Kim, J., Ye, G., and Kim, D. (2010). Moving object de-
tection under free-moving camera. In 2010 IEEE In-
ternational Conference on Image Processing, pages
4669–4672. IEEE.
Kulchandani, J. S. and Dangarwala, K. J. (2015). Moving
object detection: Review of recent research trends. In
2015 International conference on pervasive comput-
ing (ICPC), pages 1–5. IEEE.
Lin, T. (2017). Focal loss for dense object detection. arXiv
preprint arXiv:1708.02002.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C.-Y., and Berg, A. C. (2016). Ssd: Single shot
multibox detector. In Computer Vision–ECCV 2016:
14th European Conference, Amsterdam, The Nether-
lands, October 11–14, 2016, Proceedings, Part I 14,
pages 21–37. Springer.
Liu, Z., Yang, N., Wang, Y., Li, Y., Zhao, X., and Wang,
F.-Y. (2023). Enhancing traffic object detection in
variable illumination with rgb-event fusion. arXiv
preprint arXiv:2311.00436.
Mane, S. and Mangale, S. (2018). Moving object detec-
tion and tracking using convolutional neural networks.
In 2018 second international conference on intelli-
gent computing and control systems (ICICCS), pages
1809–1813. IEEE.
Mishra, A., Ghosh, R., Principe, J. C., Thakor, N. V., and
Kukreja, S. L. (2017). A saccade based framework
for real-time motion segmentation using event based
vision sensors. Frontiers in neuroscience, 11:83.
Mitrokhin, A., Hua, Z., Fermuller, C., and Aloimonos, Y.
(2020). Learning visual motion segmentation using
event surfaces. In Proceedings of the IEEE/CVF Con-
Low Latency Pedestrian Detection Based on Dynamic Vision Sensor and RGB Camera Fusion
849

ference on Computer Vision and Pattern Recognition,
pages 14414–14423.
Narasimhan, S. G. and Nayar, S. K. (2003). Contrast
restoration of weather degraded images. IEEE trans-
actions on pattern analysis and machine intelligence,
25(6):713–724.
Ngatchou, P., Zarei, A., and El-Sharkawi, A. (2005). Pareto
multi objective optimization. In Proceedings of the
13th international conference on, intelligent systems
application to power systems, pages 84–91. IEEE.
Parameshwara, C. M., Li, S., Ferm
¨
uller, C., Sanket, N. J.,
Evanusa, M. S., and Aloimonos, Y. (2021). Spikems:
Deep spiking neural network for motion segmenta-
tion. In 2021 IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS), pages 3414–
3420. IEEE.
Parameshwara, C. M., Sanket, N. J., Gupta, A., Fermuller,
C., and Aloimonos, Y. (2020). Moms with events:
Multi-object motion segmentation with monocular
event cameras. arXiv preprint arXiv:2006.06158,
2(3):5.
Perot, E., De Tournemire, P., Nitti, D., Masci, J., and
Sironi, A. (2020). Learning to detect objects with a
1 megapixel event camera. Advances in Neural Infor-
mation Processing Systems, 33:16639–16652.
Rebecq, H., Gehrig, D., and Scaramuzza, D. (2018). Esim:
an open event camera simulator. In Conference on
robot learning, pages 969–982. PMLR.
Redmon, J. (2016). You only look once: Unified, real-time
object detection. In Proceedings of the IEEE confer-
ence on computer vision and pattern recognition.
Schraml, S., Belbachir, A. N., Milosevic, N., and Sch
¨
on,
P. (2010). Dynamic stereo vision system for real-
time tracking. In Proceedings of 2010 IEEE Inter-
national Symposium on Circuits and Systems, pages
1409–1412. IEEE.
Stoffregen, T., Gallego, G., Drummond, T., Kleeman, L.,
and Scaramuzza, D. (2019). Event-based motion seg-
mentation by motion compensation. In Proceedings of
the IEEE/CVF International Conference on Computer
Vision, pages 7244–7253.
Taverni, G., Moeys, D. P., Li, C., Cavaco, C., Motsnyi, V.,
Bello, D. S. S., and Delbruck, T. (2018). Front and
back illuminated dynamic and active pixel vision sen-
sors comparison. IEEE Transactions on Circuits and
Systems II: Express Briefs, 65(5):677–681.
Tomy, A., Paigwar, A., Mann, K. S., Renzaglia, A., and
Laugier, C. (2022). Fusing event-based and rgb cam-
era for robust object detection in adverse conditions.
In 2022 International Conference on Robotics and Au-
tomation (ICRA), pages 933–939. IEEE.
Viola, P. and Jones, M. (2001). Rapid object detection us-
ing a boosted cascade of simple features. In Proceed-
ings of the 2001 IEEE computer society conference on
computer vision and pattern recognition. CVPR 2001,
volume 1, pages I–I. Ieee.
Wan, Z., Mao, Y., Zhang, J., and Dai, Y. (2023). Rpe-
flow: Multimodal fusion of rgb-pointcloud-event for
joint optical flow and scene flow estimation. In Pro-
ceedings of the IEEE/CVF International Conference
on Computer Vision, pages 10030–10040.
Wang, C.-Y., Bochkovskiy, A., and Liao, H.-Y. M. (2021).
Scaled-YOLOv4: Scaling cross stage partial network.
In Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
13029–13038.
Xu, L., Xu, W., Golyanik, V., Habermann, M., Fang, L.,
and Theobalt, C. (2020). Eventcap: Monocular 3d
capture of high-speed human motions using an event
camera. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition (CVPR).
Zhang, S., Sun, L., and Wang, K. (2023). A multi-scale
recurrent framework for motion segmentation with
event camera. IEEE Access.
Zhao, Y., Lv, W., Xu, S., Wei, J., Wang, G., Dang, Q., Liu,
Y., and Chen, J. (2024). Detrs beat yolos on real-time
object detection. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recog-
nition, pages 16965–16974.
Zhou, Y., Gallego, G., Lu, X., Liu, S., and Shen, S.
(2021). Event-based motion segmentation with spatio-
temporal graph cuts. IEEE transactions on neural net-
works and learning systems, 34(8):4868–4880.
Zhou, Z., Wu, Z., Boutteau, R., Yang, F., Demonceaux, C.,
and Ginhac, D. (2023). Rgb-event fusion for moving
object detection in autonomous driving. In 2023 IEEE
International Conference on Robotics and Automation
(ICRA), pages 7808–7815. IEEE.
Zhu, Z., Wei, H., Hu, G., Li, Y., Qi, G., and Mazur, N.
(2020). A novel fast single image dehazing algorithm
based on artificial multiexposure image fusion. IEEE
Transactions on Instrumentation and Measurement,
70:1–23.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
850
