
Conditioned Generative AI for Synthetic Training of 6D Object Pose
Detection
Mathijs Lens
a
, Aaron Van Campenhout
b
and Toon Goedem
´
e
c
EAVISE-PSI, KU Leuven Campus De Nayer, Sint-Katelijne-Waver, Belgium
{mathijs.lens, aaron.vancampenhout, toon.goedeme}@kuleuven.be
Keywords:
Pose Estimation, 6D Pose Estimation, Pacel Detection, ControlNet, Stable Diffusion.
Abstract:
In this paper, we propose a method to generate synthetic training images for a more complex computer vision
task compared to image classification, specifically 6D object pose detection. We demonstrate that conditioned
diffusion models can generate unlimited training images for training an object pose detection model for a cus-
tom object type. Moreover, we investigate the potential of (automatically) filtering out ill-produced images in
the dataset, which increases the quality of the image dataset, and show the importance of finetuning the trained
model with a limited amount of real-world images to bridge the remaining sim2real domain gap. We demon-
strate our pipeline in the use case of parcel box detection for the automation of delivery vans. All code is pub-
licly available on our GitLab https://gitlab.com/EAVISE/avc/generative-ai-synthetic-training-pose-detection.
1 INTRODUCTION
Training deep learning models for computer vision
tasks typically requires extensive manually annotated
datasets. As the scaling laws predict, the more chal-
lenging a task, the more complex the neural network
architecture must be, and consequently, the greater
the amount of data required for training. Collecting
large quantities of relevant images is already time-
consuming and costly process. However, the fact that
all of these images need to be manually labeled, ren-
ders this in many cases infeasible. Especially when
the labels are complex and demand significant man-
ual effort, as in the task we focus on.
Indeed, this paper’s vision task is 6D object pose
determination. Compared to the simple image la-
bels required for classification, the labels for 6D ob-
ject pose detection are significantly more expensive
to produce. The effort to annotate an object’s 6D
(x, y, z, α, β, γ) pose is clearly more time-demanding
than the actual image acquisition.
A solution we explore in this paper to overcome
this bottleneck, is synthetic data generation. This pa-
per introduces the first pipeline, to the best of our
knowledge, that uses Generative AI for the creation
of realistically looking synthetic datasets for 6D ob-
a
https://orcid.org/0009-0005-4798-3555
b
https://orcid.org/0009-0006-4193-3650
c
https://orcid.org/0000-0002-7477-8961
ject pose detection. We propose to use wireframe con-
ditioning as control input to a combination of Stable
Diffusion and ControlNet, enabling to exactly steer
the image creation process with precise 6D object
pose labels. Stable Diffusion is utilized to create re-
alistic synthetic images, and ControlNet conditions
these images based on specific 6D pose information.
By randomly modifying the input prompts, we
generate diverse object instances under various light-
ing, texture, and environmental conditions, enriching
the variety and robustness of the synthetic dataset.
Additionally, we incorporate a filter network that
automatically evaluates the quality of the generated
images, identifying and discarding poorly rendered or
inaccurate examples. This filtering process ensures
that only high-quality synthetic data, accurately re-
flecting the target 3D poses, is used for model train-
ing. By leveraging this synthetic data pipeline, we
drastically reduce the dependency on expensive real-
world datasets, enabling more efficient and scalable
3D object pose detection. We demonstrate that our
pipeline is effective for parcel box detection, but by
modifying the prompt inputs, it can be easily adapted
to generate annotated data for a wide range of other
objects, making it a versatile solution for various ap-
plications.
In this paper, we showcase our pipeline on a par-
cel box detection use case. Since last-mile delivery is
the most time-consuming part of the delivery process,
investments in making this process more efficient pay
324
Lens, M., Van Campenhout, A. and Goedemé, T.
Conditioned Generative AI for Synthetic Training of 6D Object Pose Detection.
DOI: 10.5220/0013130600003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 2: VISAPP, pages
324-331
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
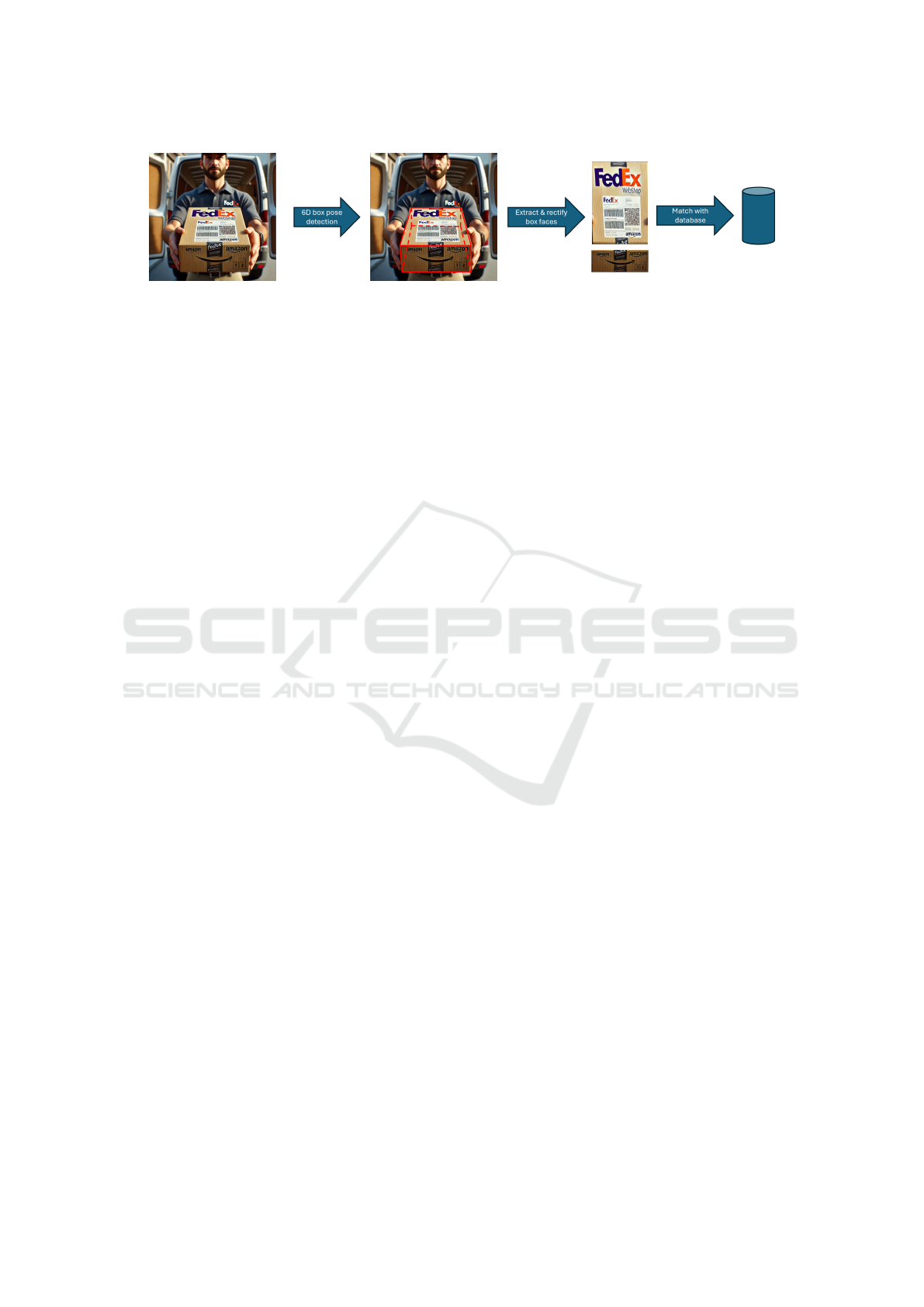
Figure 1: Illustration of our parcel recognition use case. This paper focuses on the first phase, 6D pose detection of parcel
boxes. Using the 6D pose, we can extract and rectify the box faces, a crucial step for identifying specific parcels.
off quickly. Currently, the delivery person manually
loads the vehicle using his “mental map” for sorting,
enabling him to retrieve the parcels later on. If we
can automate this, the loading (incl. sorting) of the
parcels can be done a lot quicker. This would require
automatic recognition and localisation of the parcels
in the van. We develop a camera-based system which
can be installed in the delivery van. The delivery van
operator can use this camera system to quickly iden-
tify any parcel box by just holding it in the field-of-
view. Once identified, the in-van computer system
can then indicate where to optimally store that par-
cel in the van during the loading phase, or what the
exact destination address is of the parcel in the deliv-
ery phase. Our envisioned system must be capable
of detecting parcels and performing pose estimation,
such that the box faces can be cut out from the im-
age, rectified and compared with a database recorded
in the parcel facility, as demonstrated in figure. High
accuracy in pose estimation is essential to ensure the
reliable extraction and rectification of these box faces.
Figure 1 illustrates this. While the box face recogni-
tion part is not covered in this paper, the first step of
this application, i.e. 6D parcel box pose estimation,
is an ideal use case for the presented pipeline. A key
challenge, however, lies in creating a large and diverse
dataset of 6D pose-annotated parcel images, as man-
ual annotation is both time-consuming and costly.
This paper presents several key contributions.
First, up to our knowledge, we propose the first
automatically annotated synthetic dataset production
pipeline for 6D object pose detection datasets. We
demonstrate it is a viable solution to the challenge
of creating large, annotated real-world datasets and
that a high-quality synthetic dataset can achieve de-
cent performance while requiring less data. Further-
more, we show that combining synthetic data with
real-world data results in even better performance
than using either data type alone. Finally, the pipeline
we introduce enables the creation of diverse synthetic
datasets for a wide range of objects, wherever it is
feasible to create a wireframe of the object.
2 RELATED WORK
In this section, first we review the state-of-the-art on
6D object pose estimation techniques, focusing on ad-
vancements in deep learning-based methods. Next,
we discuss recent developments in synthetic data gen-
eration, highlighting its growing role in addressing
the challenges of large-scale annotated dataset cre-
ation.
2.1 6D Pose Estimation
Understanding the position and orientation of ob-
jects is crucial in various fields such as robotics, au-
tonomous driving, and augmented reality, as it en-
ables machines to comprehend and interact with their
environment. A key task in this domain is 6D pose
estimation, which determines an object’s translation
(x, y, z) and rotation (α, β, γ) within a scene.
Many state-of-the-art 6D pose estimation methods
utilize depth sensors or CAD models for training, as
these provide precise 6D annotations like (Zhao et al.,
2020; Josifovski et al., 2018; Su et al., 2015). How-
ever, since our approach does not rely on such re-
sources, we focus on monocular pose estimation tech-
niques. These methods predict object poses from sin-
gle RGB images, offering a more flexible and accessi-
ble solution that aligns with our synthetic data gener-
ation pipeline. These techniques often aim to estimate
the projection of a 3D object and rely on the PNP al-
gorithm to solve the translation and rotation. By iden-
tifying keypoints or correspondences between the 3D
model and its 2D projection, the PnP algorithm com-
putes the object’s pose in the scene (Marullo et al.,
2023). Monocular methods often employ deep learn-
ing to predict these keypoints directly from RGB im-
ages, making them a versatile approach for scenarios
where depth data or CAD models are unavailable.
A commonly used monocular dataset for pose es-
timation is Google’s Objectron dataset (Ahmadyan
et al., 2021), which consists of 9 object classes an-
notated with 3D bounding boxes. This dataset has be-
come a key benchmark for 6D object pose estimation,
Conditioned Generative AI for Synthetic Training of 6D Object Pose Detection
325

enabling models to learn object-centric features in a
variety of real-world scenes.
Several notable models utilize 3D bounding box
annotations for 6D pose estimation. BB8 (Rad and
Lepetit, 2017) employs a multistage approach using
a cascade of convolutional neural networks (CNNs),
where each network progressively refines the key-
point predictions from the previous stage. This mul-
tistage refinement improves accuracy, especially in
challenging conditions such as occlusions or cluttered
backgrounds. YOLO6D (Tekin et al., 2018), in con-
trast, adopts a single-shot approach that simultane-
ously detects objects in RGB images and predicts
their 6D pose in real time. By eliminating the need
for multiple stages, YOLO6D achieves greater com-
putational efficiency while maintaining reliable per-
formance in complex environments.
CatTrack (Yu et al., 2024) leverages vision trans-
formers for detecting and tracking object keypoints,
providing a robust solution for multi-object tracking
in dynamic and cluttered scenes. The combination
of tracking and keypoint detection with vision trans-
formers enables CatTrack to accurately estimate 6D
object poses in video streams.
2.2 Synthetic Data
Over recent years, synthetic data has become instru-
mental in computer vision research due to its ability
to overcome the challenges of manual generation and
ethical concerns associated with real-world data ac-
quisition (Man and Chahl, 2022).
Among the various methods for generating syn-
thetic data, gaming engines like Unity or Unreal have
emerged as a powerful tool for creating virtual envi-
ronments that facilitate the visualization of complex
scenes. Example application domains are: human
faces (Wood et al., 2021; Delussu et al., 2024), pedes-
trian detection (Hattori et al., 2018), manufacturing
industry (Moonen et al., 2023) and automotive (De-
schaud, 2021; Zhang et al., 2019; Zhao et al., 2024).
Despite the improving rendering quality of these en-
gines, the resulting images can still look artificial.
Hence, a model trained solely on synthetic images
will typically perform not as good on real images, i.e.
the so-called sim2real domain gap. Moreover, one
needs a complete and realistic 3D model of all objects
in the scene to render.
Alternatively, generative AI techniques can infer
missing information in images, bypassing the need
for fully explicit input to create synthetic data. For
instance, GAN (Generative Adversarial Networks)
models have been employed to generate novel, re-
alistic images(Nikolenko, 2021). In (Abbas et al.,
2021), the authors extend a limited real dataset of dis-
eased tomato leaves with synthetic images generated
using DCGAN, demonstrating improved generaliza-
tion during training. Another application of GANs is
presented in (Rajagopal et al., 2023), in which Unreal
Engine-generated images are enhanced using Cycle-
GAN to improve lighting and textures, thus increasing
realism. The authors observed that while the perfor-
mance was initially hindered by the artificial appear-
ance of the data, CycleGAN effectively closed this
realism gap.
More recently, high-quality image generation has
become achievable with models like Stable Diffu-
sion. (Lomurno et al., 2024) uses Stable Diffusion
2.0 to generate synthetic datasets for image classifica-
tion tasks. Notably, in one-third of the experiments,
models trained on synthetic data outperformed those
trained on real data, illustrating the potential of this
approach.
The previously mentioned methods primarily fo-
cus on generating images without explicit control over
the conditions. In (Tran, 2024), a novel method
is introduced that generates high-quality segmenta-
tion masks alongside synthetic data. By extracting
candidate point prompts from attention maps, these
prompts guide a vision model to yield fine-grained
segmentation masks. While this method provides seg-
mentation masks, it lacks direct control over the im-
age generation process, a feature that our method ad-
dresses.
Lastly, in (Valvano et al., 2024), a diffusion model
is trained to generate training images of custom ob-
jects based on textual prompts and associated condi-
tions. However, this approach cannot explicitly ex-
press 6D poses using text prompts, highlighting a lim-
itation that ControlNet seeks to overcome.
3 METHOD
In this section, we will first describe the pipeline used
for synthetic dataset generation and provide details
about the CenterPose model and the PnP algorithm
for object pose estimation.
3.1 Synthetic Data Pipeline
Figure 6 provides an overview of the pipeline we
developed for generating synthetic datasets. The
pipeline we present starts from randomly chosen 6D
pose parameters (x, y, z, α, β, γ) and randomly chosen
box dimensions (w, h, d), which are used as input for
a program called the Wireframe Generator, which
leverages OpenGL to render a wireframe image of the
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
326

Figure 2: The first component of our pipeline for gener-
ating synthetic datasets conditioned on wireframes for 6D
pose estimation is the wireframe generator. This component
randomly renders 3D wireframes in OpenGL, including 6D
pose annotations.
Figure 3: Comparing images generated with different Sta-
ble Diffusion models.
box at the specified location. These images are gen-
erated with a fixed resolution of 512x512 pixels. The
annotated wireframes in the image are automatically
saved in a JSON file. A few examples of these wire-
frames are shown in Figure 2.
The crux of the matter is that we can use these
wireframe images as a means to control the syn-
thetic image generation process. ControlNet (Zhang
et al., 2023) indeed enables to guide the Stable Dif-
fusion (Rombach et al., 2022) image generation with
a graphical input. It enforces spatial consistency be-
tween the input image and generated synthetic image.
as we want the box object to be synthesized exactly at
the 6D pose corresponding to the parameters we gen-
erated the wireframe image with, we chose to use the
scribble condition modality ControlNet offers. We
observed that this indeed controls the pose of the box
in the generated image well, while the rest of the im-
age is filled in with realistic fantasized content. This
behaviour is not possible when a depth map of the
box was used as input instead. Because of the lack in
depth input data in the background, only flat scenes
were synthesized with that modality.
We chose a Stable Diffusion model fine-tuned on
human figures, which results in higher quality im-
ages when generating depictions of a person hold-
ing a parcel. As shown in Figure 3, the Realistic Vi-
sion v20 model generates high-quality images featur-
ing humans.
During the image generation process, we employ a
prompt template to generate a variety of different text
prompts, as illustrated in Figure 5. In this template,
bold words in the sentences are randomly substituted
with terms from predefined lists. This approach al-
Figure 4: Poorly generated images.
Figure 5: Prompt-template used for generating diverse
prompt texts.
lows to create a wide variety of detailed prompts,
leading to the generation of diverse images.
By cascading these components, we create a
pipeline capable of generating a diverse, realistic-
looking synthetic dataset. This process can be re-
peated indefinitely until a sufficiently large dataset is
accumulated for training, without the need for human
intervention.
3.2 Synthetic Image Filtering
However, during our experiments, we observed that
some images appeared unrealistic or poorly gener-
ated, as illustrated in Figure 4. To minimize the gap
between real and synthetic data, we propose a filter-
ing neural network that detects and removes poorly
generated images. For this classifier network, we use
a ResNet-18 model, trained on a seperate set of syn-
thetic images which we manually annotated as “good“
or “bad“. This classifier achieves 73.87% accuracy on
the test set.
3.3 6D Pose Detection Model
Once the pipeline presented above is executed, we end
up with a large filtered synthetic dataset suitable for
training CenterPose. CenterPose (Lin et al., 2022) is
a single-stage keypoint-based approach for category-
level object pose estimation. It uses three branches
to determine the 6-DoF (degrees of freedom) pose of
an object. First, a keypoint detection branch identifies
the center of the object. Once the center is detected,
the model estimates the object’s vertices. Finally, the
Conditioned Generative AI for Synthetic Training of 6D Object Pose Detection
327
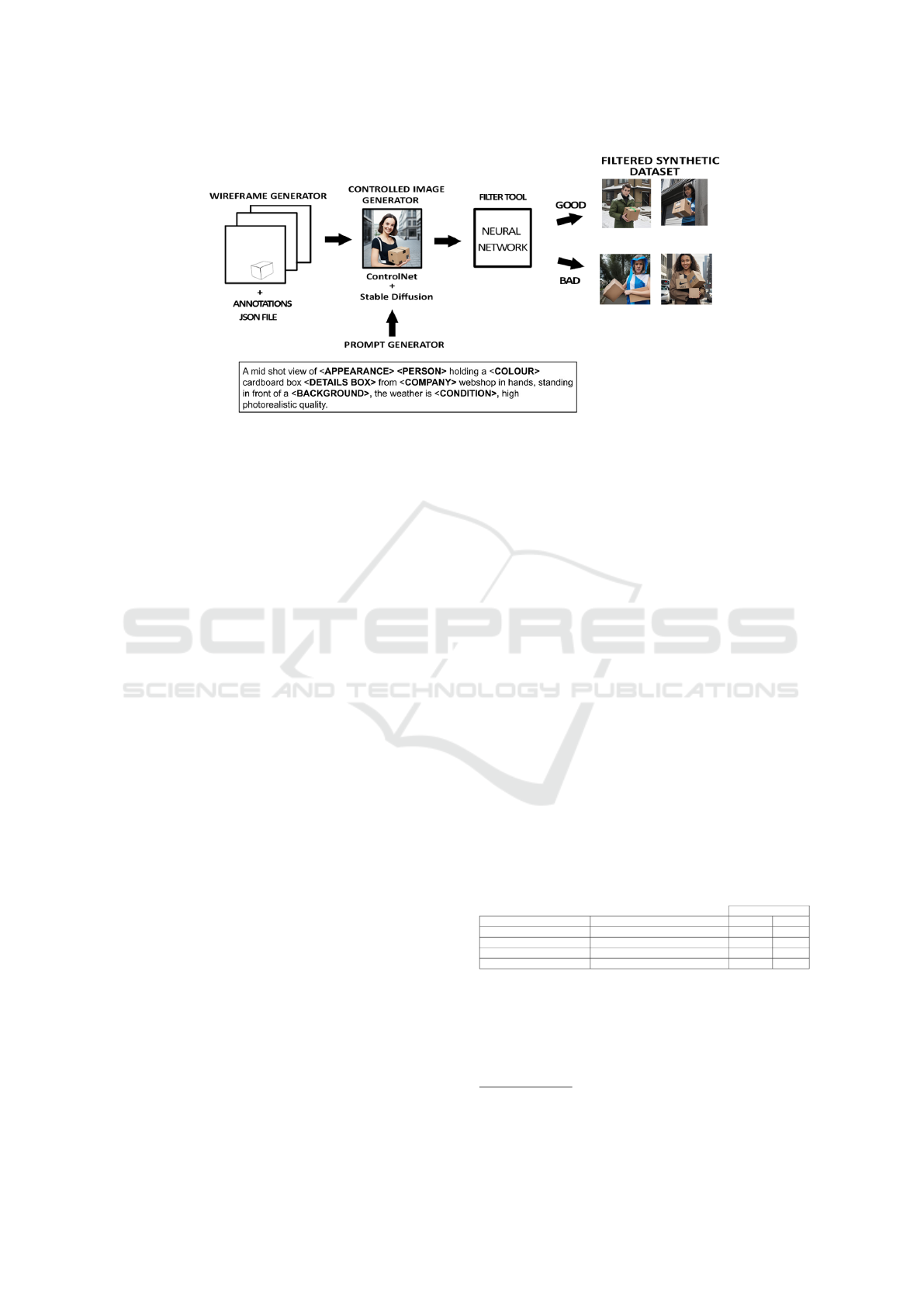
Figure 6: An overview of all the components in the synthetic dataset generation pipeline.
cuboid dimension branch is used to estimate the rela-
tive dimensions of the object in the scene.
After these branches have been executed, the PnP
(Perspective-n-Point) algorithm is applied. This algo-
rithm uses the detected keypoints, estimated dimen-
sions and the camera’s intrinsic parameters to com-
pute the rotation and translation of the object.
4 RESULTS
4.1 Datasets
For our experiments, we use various different
datasets, which allows us to gain better insight into
the usefulness of synthetic data for training 6D object
pose detection and the effectiveness of our pipeline.
Table 1 gives an overview of the different datasets
we collected for the parcel box detection use case.
First of all, for our synthetic pipeline we annotated
1,080 generated synthetic images, which we used to
train and test the image filtering network described
in Section 3.2. For this, we manually inspected all
images and annotated them as “good“ or “bad“. From
this annotated dataset, 969 images were set aside for
training, while 111 images were used for testing.
To conduct the actual experiments, we put our
pipeline in full throttle and let it freely generate a big
dataset of 5600 synthetic images. We used our fil-
tering network to filter out poorly generated images,
as shown in Figure 4, reducing the initial synthetic
dataset to 3,300 training images and 100 test images.
Both of these datasets were used to train the object
pose detection network, as described below.
Finally, to better understand the sim2real domain
gap and evaluate the real-life performance, we also
collected a real dataset consisting of 299 images.
These 299 images are then split into 199 for train-
ing and 100 for testing. The dataset includes pic-
tures photographed from 29 different cardboard par-
cel boxes, with approximately 10 pictures taken from
different angles for each parcel. Half of these pictures
are mid-shots of a person holding a parcel, while the
other half are parcels lying in various locations, as
illustrated in Figure 7. Dimensions of each parcel
box were measured with a ruler. Annotation of the
6D pose of each box in each image is done manually.
For this, we developed an annotation tool
1
, that uses
the Perspective-n-Point (PnP) algorithm on manually
clicked corner points of the box, yielding a quick ini-
tial estimate of the pose. In a second step, this pose
can be manually refined by finetuning each of the six
dimensions.
4.2 Evaluation Metrics
In this section, we describe the metrics used for eval-
uating the performance of the model, specifically the
3D Intersection over Union (IoU) and two types of 2D
IoU, which are illustrated in fig. 8.
Table 1: Overview of the datasets used in our use case.
Number of images
Dataset name Creation details Training Test
Filter training synthetic manually labeled good/bad 969 111
unfiltered Synthetic training automatically generated 5600
Filtered synthetic training automatically generated and filtered 3300 100
Real manually annotated 6D pose 199 100
The 3D IoU metric measures how well the pre-
dicted 3D bounding box overlaps with the ground
truth 3D bounding box, providing insight into the
accuracy of the 3D pose estimation. Because a 2D
image always has scale ambiguity, CenterPose can’t
1
https://gitlab.com/EAVISE/avc/
generative-ai-synthetic-training-pose-detection
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
328

Figure 7: Example of images from the manually annotated
test dataset.
Figure 8: Illustration of the evaluation metrics: 3D IoU
(left), 2D IoU of bounding boxes (middle) and 2D mask
IoU (right).
determine the depth from a single RGB image. We
hence do not know if the detected box is a small box
close to the camera, or a very large box far away. To
alleviate this, we normalize the depth dimension by
translating the center point of the detected 3D bound-
ing box to the center point of the ground truth over its
threedimensional line-of-sight axis.
The 3D IoU is used in two ways. We both com-
pute the mean IoU over the entire test set, as is done
in semantic segmentation evalutions. But, next to that,
we threshold the IoU of the detections to count it as
a true positive or not. The resulting average preci-
sion for two different thresholds (0.5 and 0.75) is also
reported in our experiments, giving insight to the ac-
curacy of the estimated poses.
Since CenterPose uses the Perspective-n-Point
(PnP) algorithm to estimate the 6-DoF pose, it re-
quires knowledge of the intrinsic camera matrix used
to capture the images. However, for synthetic data
generated using Stable Diffusion, the intrinsic camera
parameters are not available, making 3D IOU evalua-
tion infeasible for synthetic data. To address this, we
evaluate the accuracy on synthetic data using the 2D
IoU metric. We calculated the 2D IoU in two different
ways:
• Computing the intersection and overlap of the de-
tected and ground truth 2D bounding boxes of the
object in the image.
• Computing the intersection and overlap of the
segmentation masks of both detected and ground
truth boxes in the image, produced by the convex
hull of the object points in the image.
These two methods offer a clearer understanding of
how accurately synthetic objects are detected in 2D,
despite the absence of 3D camera parameters. Ad-
ditionally, we report the Miss Rate metric, which in-
dicates the percentage number of objects the model
failed to detect. When an object is missed, the PnP al-
gorithm is not executed, resulting in both the 2D and
3D IoU metrics being zero.
4.3 Results Overview
Table 2 presents the results obtained after training on
the different datasets. It is important to note for the
evaluation results, that all trainings started from the
CenterPose model pre-trained on the Google’s Objec-
tron dataset (Ahmadyan et al., 2021), more specifi-
cally the cereal box category. The datasets consist of
images containing a parcel, annotated by determining
the eight vertices of each parcel and the normalized
dimensions of these parcels. The table compares the
performance of the model using the 2D and 3D IoU
metrics defined above on the respective datasets.
We evaluated the performance of the models on
both synthetic and real test sets. For the training
dataset, we compared the unfiltered and filtered ver-
sions. The bottom two models were initially trained
on a synthetic dataset, followed by further fine-tuning
on the real-life training dataset. For the fine-tuning
process on real data, we used the same learning rate
and selected the number of epochs that yielded the
best results.
4.4 Discussion
Upon reviewing the results, it is evident that the
model trained solely on cereal box data from Google’s
Objectron dataset performed the worst, as expected.
The limited training on cereal boxes constrained the
model’s ability to generalize to parcel objects. Train-
ing the model exclusively on 199 real training images
resulted in improved performance on both synthetic
and real metrics, with a significant reduction on the
miss rate.
Training solely on the unfiltered synthetic dataset
of 5,600 images yielded the best performance when
tested on the synthetic test dataset. It also had a posi-
tive impact on the real test dataset, demonstrating that
unfiltered synthetic data can help the model general-
ize better to real-world scenarios.
In contrast, training on the filtered synthetic
dataset of 3,300 images resulted in slightly worse per-
formance on the synthetic test dataset. However, the
filtered synthetic dataset achieved a marginally higher
average IoU compared to the unfiltered dataset when
Conditioned Generative AI for Synthetic Training of 6D Object Pose Detection
329

Table 2: Object pose detection results of the model after training on different datasets. Grey cells report the results on the
synthetic test set, white cells on the real-life test set.
2D IoU 3D IoU
Training dataset Test dataset
Bounding box Mask AP@0.5IoU AP@0.75IoU meanIoU
Miss Rate
Synthetic 0.3832 0.3293 x x x x
Cereal boxes
Real 0.2016 0.1922 0.0800 0.0100 0.1058 0.7100
Synthetic 0.6796 0.6122 x x x x
Real
Real 0.7402 0.6816 0.3000 0.0200 0.3940 0.1000
Synthetic 0.9321 0.8919 x x x x
Unfiltered synthetic
Real 0.5083 0.4680 0.2000 0.0200 0.2325 0.3400
Synthetic 0.9293 0.8771 x x x x
Filtered synthetic
Real 0.5094 0.4647 0.2000 0.0200 0.2384 0.3500
Synthetic 0.9100 0.8706 x x x x
Unfiltered synthetic + real
Real 0.7720 0.7221 0.4400 0.0600 0.4332 0.1000
Synthetic 0.8974 0.8327 x x x x
Filtered synthetic + real
Real 0.7568 0.7016 0.3800 0.0400 0.4247 0.1000
evaluated on the real test dataset. This improvement
can be attributed to the higher quality information in
the filtered dataset. The higher miss rate observed in
the filtered dataset may be due to its smaller size com-
pared to the unfiltered one.
Finally, when fine-tuning both the unfiltered and
filtered synthetic datasets on real data, the best overall
performance was surprisingly achieved with the unfil-
tered synthetic + real training dataset. This suggests
that the larger volume of data in the unfiltered set (al-
most double the amount of images) contributed more
than the data quality itself. But, despite having fewer
images, the filtered dataset performed nearly as well,
indicating that the higher quality of data in the filtered
set compensated somehow for its smaller size. How-
ever, when fine-tuning further, the impact of filtering
out poor-quality images was minimal. The random-
ness introduced by the unfiltered dataset may have
been sufficient for effective pre-training.
4.5 Non-Cuboid Objects
In our test use case on parcel detection, the object at
hand is a simple cuboid object. However, our pipeline
can be used for any non-cuboid object of which a 3D
wireframe model is available. Figure 9 demonstrates
synthetically generated images using our pipeline, af-
ter rendering these none-cuboid wireframe models in
random 6D poses.
5 CONCLUSION
In this paper, we proposed a pipeline for the con-
trolled generation of 6D annotated image datasets for
object pose detection training. with this, we explored
the potential of automatic generation of a large anno-
tated synthetic dataset, as well as the effectiveness of
using synthetic data to train a 6D object pose detec-
Figure 9: Non-cuboid objects generated with the same
pipeline starting from a 3D object wireframe.
tion network.
The proposed pipeline for generating annotated
synthetic datasets provides a cost-efficient solution to
reduce the reliance on extensive manual annotation.
The results on a real-life application example, i.c.
parcel box pose detection, demonstrate that models
trained on synthetic datasets produced by this pipeline
exhibit strong generalization capabilities when ap-
plied to real-world test data. However, a key chal-
lenge remains in generating high-quality, realistic im-
ages with rich information. Ensuring that prompts are
diverse and well-aligned with the conditioned genera-
tion process is crucial to enhancing the overall quality
and variability of the synthetic data.
We explored the potential of automatic filtering
out of poorly produced synthetic images, increasing
the data quality in the generated dataset. Our findings
indicate that when training solely on synthetic data,
the filtered dataset achievable slightly better perfor-
mance due to the higher quality of the data. How-
ever, the unfiltered dataset exhibited a lower miss rate,
likely because it exposed the model to a larger volume
of synthetic data during training. This highlights the
importance of balancing data quality and quantity for
optimal model training.
Additionally, training on synthetic data alone
demonstrated a positive transfer effect when tested on
real-world data. While the results were not as strong
as those achieved through training solely on real data,
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
330

combining synthetic and real datasets produced the
best overall results. Interestingly, when fine-tuning
the model with real data after initial training on syn-
thetic data, the impact of filtering became less signif-
icant. The randomness introduced by the unfiltered
dataset improved generalization during fine-tuning.
This hybrid approach suggests that synthetic data can
be a valuable supplement in situations where real-
world data is limited or difficult to annotate. We also
demonstrated the general applicability on objects be-
yond simple cuboid shapes.
REFERENCES
Abbas, A., Jain, S., Gour, M., and Vankudothu, S. (2021).
Tomato plant disease detection using transfer learning
with c-gan synthetic images. Computers and Electron-
ics in Agriculture, 187:106279.
Ahmadyan, A., Zhang, L., Ablavatski, A., Wei, J., and
Grundmann, M. (2021). Objectron: A large scale
dataset of object-centric videos in the wild with pose
annotations. Proceedings of the IEEE Conference on
Computer Vision and Pattern Recognition.
Delussu, R., Putzu, L., and Fumera, G. (2024). Synthetic
data for video surveillance applications of computer
vision: A review. IJCV, pages 1–37.
Deschaud, J.-E. (2021). Kitti-carla: a kitti-like dataset
generated by carla simulator. arXiv preprint
arXiv:2109.00892.
Hattori, H., Lee, N., Boddeti, V. N., Beainy, F., Kitani,
K. M., and Kanade, T. (2018). Synthesizing a scene-
specific pedestrian detector and pose estimator for
static video surveillance - can we learn pedestrian de-
tectors and pose estimators without real data? Int.
Journal of Computer Vision, 126(9):1027–1044.
Josifovski, J., Kerzel, M., Pregizer, C., Posniak, L., and
Wermter, S. (2018). Object detection and pose estima-
tion based on convolutional neural networks trained
with synthetic data. In 2018 IEEE/RSJ IROS, pages
6269–6276.
Lin, Y., Tremblay, J., Tyree, S., Vela, P. A., and Birchfield,
S. (2022). Single-stage keypoint-based category-level
object pose estimation from an RGB image. In IEEE
ICRA.
Lomurno, E., D’Oria, M., and Matteucci, M. (2024). Stable
diffusion dataset generation for downstream classifi-
cation tasks. arXiv preprint arXiv:2405.02698.
Man, K. and Chahl, J. (2022). A review of synthetic im-
age data and its use in computer vision. Journal of
Imaging, 8(11).
Marullo, G., Tanzi, L., Piazzolla, P., and Vezzetti, E. (2023).
6d object position estimation from 2d images: A lit-
erature review. Multimedia Tools and Applications,
82(16):24605–24643.
Moonen, S., Vanherle, B., de Hoog, J., Bourgana, T., Bey-
Temsamani, A., and Michiels, N. (2023). Cad2render:
A modular toolkit for gpu-accelerated photorealistic
synthetic data generation for the manufacturing indus-
try. In Proceedings of WACV, pages 583–592.
Nikolenko, S. (2021). Synthetic data for deep learning, vol-
ume 174. Springer.
Rad, M. and Lepetit, V. (2017). Bb8: A scalable, accurate,
robust to partial occlusion method for predicting the
3d poses of challenging objects without using depth.
In 2017 IEEE International Conference on Computer
Vision (ICCV), pages 3848–3856.
Rajagopal, B. G., Kumar, M., Alshehri, A. H., Alanazi, F.,
Deifalla, A. F., Yosri, A. M., and Azam, A. (2023).
A hybrid cycle gan-based lightweight road perception
pipeline for road dataset generation for urban mobil-
ity. Plos one, 18(11):e0293978.
Rombach, R., Blattmann, A., Lorenz, D., Esser, P., and
Ommer, B. (2022). High-resolution image synthesis
with latent diffusion models. In Proceedings of the
IEEE/CVF conference on computer vision and pattern
recognition, pages 10684–10695.
Su, H., Qi, C. R., Li, Y., and Guibas, L. J. (2015). Render
for cnn: Viewpoint estimation in images using cnns
trained with rendered 3d model views. In 2015 IEEE
ICCV, pages 2686–2694.
Tekin, B., Sinha, S. N., and Fua, P. (2018). Real-time seam-
less single shot 6d object pose prediction. In Proceed-
ings of the IEEE/CVF Conference on Computer Vision
and Pattern Recognition (CVPR).
Tran, T. (2024). Synthesizing image with high-quality seg-
mentation mask by prompting large vision model. In
CVPR Workshop.
Valvano, G., Agostino, A., De Magistris, G., Graziano, A.,
and Veneri, G. (2024). Controllable image synthesis
of industrial data using stable diffusion. In Proceed-
ings of the IEEE/CVF Winter Conference on Applica-
tions of Computer Vision, pages 5354–5363.
Wood, E., Baltru
ˇ
saitis, T., Hewitt, C., Dziadzio, S., Cash-
man, T. J., and Shotton, J. (2021). Fake it till you
make it: face analysis in the wild using synthetic data
alone. In Proceedings of the IEEE/CVF international
conference on computer vision, pages 3681–3691.
Yu, S., Zhai, D.-H., Xia, Y., Li, D., and Zhao, S. (2024).
Cattrack: Single-stage category-level 6d object pose
tracking via convolution and vision transformer. IEEE
Transactions on Multimedia, 26:1665–1680.
Zhang, H., Tian, Y., Wang, K., He, H., and Wang, F.-Y.
(2019). Synthetic-to-real domain adaptation for object
instance segmentation. In 2019 International Joint
Conference on Neural Networks (IJCNN), pages 1–7.
Zhang, L., Rao, A., and Agrawala, M. (2023). Adding con-
ditional control to text-to-image diffusion models. In
Proceedings of the IEEE/CVF International Confer-
ence on Computer Vision, pages 3836–3847.
Zhao, H., Wang, Y., Bashford-Rogers, T., Donzella, V.,
and Debattista, K. (2024). Exploring generative ai
for sim2real in driving data synthesis. arXiv preprint
arXiv:2404.09111.
Zhao, W., Zhang, S., Guan, Z., Luo, H., Tang, L., Peng, J.,
and Fan, J. (2020). 6d object pose estimation via view-
point relation reasoning. Neurocomputing, 389:9–17.
Conditioned Generative AI for Synthetic Training of 6D Object Pose Detection
331
