
RoDiL: Giving Route Directions with Landmarks by Robots
Kanta Tachikawa
1 a
, Shota Akahori
1 b
, Kohei Okuoka
1 c
, Mitsuhiko Kimoto
2 d
and Michita Imai
1 e
1
Department of Engineering Informatics, Keio University, Tokyo, Japan
2
Department of Mechanical Engineering Informatics, Meiji University, Tokyo, Japan
Keywords:
Route Guiding, Human-Robot-Interaction, Large Language Model.
Abstract:
For social robots, a critical aspect is the design of mechanisms for providing information that is understandable
to a human recipient. In tasks such as giving route directions, robots must explain the route clearly to ensure
that the user can reach the destination. However, most studies on guiding robots have assumed that the robot
will only present a route from its current location without considering the route’s complexity. In this study, we
propose a robot guiding system, RoDiL (Route Directions with Landmarks), that aims to guide users along
a simple route by leveraging their knowledge of a city, especially when the route from the current location
to the destination is complex. Specifically, within the context of user interaction, RoDiL comprehends which
landmarks are familiar to the user. Subsequently, RoDiL initiates giving route directions using the landmark
familiar to the user as the starting point. We conducted an experimental comparison between landmark-based
guidance and non-landmark-based guidance with 100 participants. Landmark-based guidance was evaluated
significantly more highly when the direct route from the current location was complex. In contrast, when
the route from the current location was simple, non-landmark-based guidance was preferred. These results
confirm the efficacy of the RoDiL design criteria.
1 INTRODUCTION
Social robots capable of performing tasks on behalf
of humans are becoming increasingly prevalent (Kato
et al., 2004)(Kanda et al., 2010)(Wall
´
en, 2008)(Kim
and Yoon, 2014)(Pitsch and Wrede, 2014). By taking
over tasks traditionally performed by humans, robots
can reduce the burden on people. One example of
the increasingly utilized social robots is the guiding
robot. Guiding robots are robots that perform the
task of giving route directions to users (Luna et al.,
2018)(Triebel et al., 2016). This study investigates
such social robots tasked with giving route directions.
However, the task of giving route directions
presents a significant challenge for robots. When it
comes to tasks that convey routes to humans, the crit-
ical aspect is how to make the route understandable to
the recipient. For example, in cases where the route
is characterized by a high number of turns, long dis-
tances, and complexity, merely explaining the route
may not be effective, as humans may not remember
a
https://orcid.org/0009-0007-3674-5636
b
https://orcid.org/0009-0009-1434-3868
c
https://orcid.org/0000-0002-5569-3356
d
https://orcid.org/0000-0001-8441-8815
e
https://orcid.org/0000-0002-2825-1560
the explained route in its entirety. In other words, the
robot must carefully craft its utterances and methods
of route selection to ensure that the user fully under-
stands the entire route.
The theme of guiding robot has already been re-
searched in previous studies. For example, in the
study on methods of route presentation, Oßwald et al.
proposed a method for robots to provide natural route
descriptions by imitating the sentences that humans
explain routes (Oßwald et al., 2014). Furthermore, in
the study of route generation, Russo et al. proposed
an algorithm that uses visible landmarks as nodes in
indoor environments to generate low-level routes and
simplified text (Russo et al., 2014).
These studies demonstrated efficient methods for
explaining simple routes which is characterized by a
minimal number of turns, short distances, and sim-
plicity. However, most previous studies on robots
giving route directions assumed that the robot would
guide the user from the current location without con-
sidering the route’s complexity, as shown on the left
in Figure 1. There is a lack of investigation into more
realistic approaches for effectively explaining longer
distances. In other words, those studies did not inves-
tigate how to transform complex routes into simple,
comprehensible route directions.
298
Tachikawa, K., Akahori, S., Okuoka, K., Kimoto, M. and Imai, M.
RoDiL: Giving Route Directions with Landmarks by Robots.
DOI: 10.5220/0013131300003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 1, pages 298-309
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
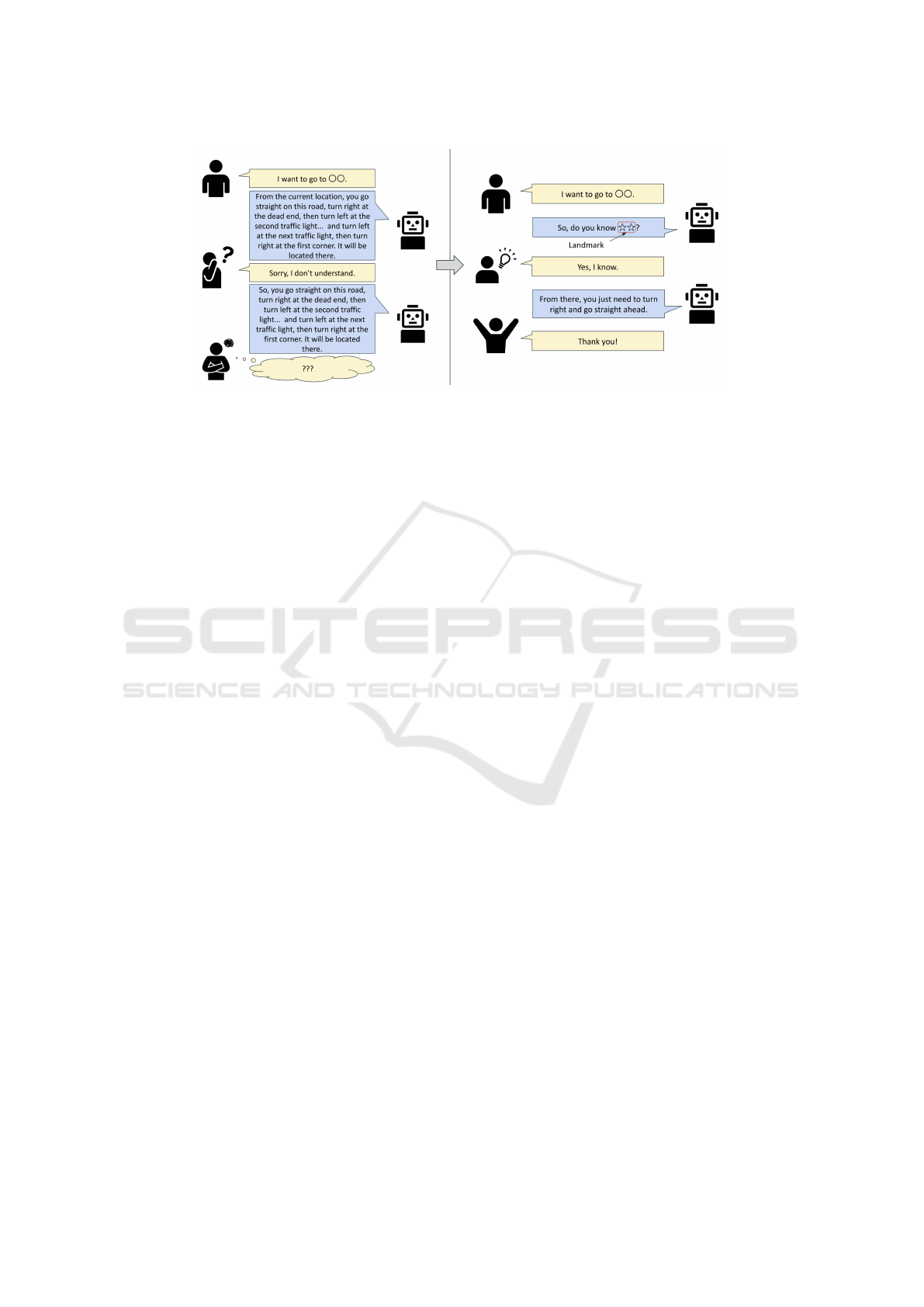
Figure 1: Examples of dialogues in previous studies and with RoDiL.
Therefore, we propose a robot system, called
RoDiL (Route Directions with Landmarks), that aims
to guide users along a simpler route by leveraging
their knowledge of a city, especially when the direct
route to the destination is complex. In an interaction,
RoDiL selects a landmark and inquires whether the
user is familiar with it. If the user is familiar with
the landmark, RoDiL proceeds to give route direc-
tions to the user with a route from that landmark to the
destination (right side of Figure 1). In other words,
RoDiL does not initially possess a database of land-
marks known to the user; instead, it seeks to discover
landmarks familiar to the user through the interaction.
In this context, the route from the landmark to the des-
tination must be simpler when compared to the route
from the current location to the destination. Further-
more, considering the user’s travel distance, the land-
mark should not be located significantly off the route
from the current location to the destination. In ad-
dition, the effectiveness of a landmark is nullified if
unknown to the user; thereby, RoDiL is obligated to
suggest landmarks of a high degree of familiarity. In
summary, the landmarks suggested by RoDiL must
be located along the route from the current location to
the destination, have a simple route to the destination,
and be well known. To extract landmarks that ful-
fill specific conditions, RoDiL considers the distance
and the number of turns of the route from the land-
mark to the destination, and the number of reviews
the landmark has received on Google Maps for calcu-
lation. Finally, RoDiL suggests the landmark with the
highest score first. Through user interaction, RoDiL
selects routes starting from landmarks that the user is
familiar with. Due to the previously mentioned cal-
culations, the chosen route is simpler than the route
from the current location. Consequently, this reduces
the robot’s utterances required for guidance and en-
hances the clarity of the route direction.
In summary, the contribution of this study lies in
the development of a robot system that acquires users’
knowledge of a city through interaction and provides
understandable explanations of complex routes.
2 RELATED WORK
2.1 Guiding Robots
Previous studies have been conducted on robots ca-
pable of giving route directions to users. For ex-
ample, Richter et al. proposed a process for adapt-
ing route guidance to match environmental and route
characteristics (Richter and Klippel, 2005)(Richter,
2008). Oßwald et al. introduced an algorithm that
enables robots to learn human-written route descrip-
tions using inverse reinforcement learning, thus im-
itating human descriptions (Oßwald et al., 2014).
Their study significantly enhanced the naturalness of
robot-generated route descriptions. In addition, Shah
et al. proposed a guiding system called LM-Nav
(Shah et al., 2023), which was created using the pre-
trained models ViNG (Shah et al., 2021), CLIP (Rad-
ford et al., 2021), and GPT-3 (Brown et al., 2020).
LM-Nav provides a high-level interface to users in a
vision-based setting where destinations are specified
using images. Waldhart et al. introduced the Shared
Visual Perspective planner, which gives route direc-
tions based on the shared visual perspectives of hu-
mans and robots (Waldhart et al., 2019). Morales et
al. modeled route concepts based on human cognitive
processes as a three-layer model comprising memory,
survey, and path layers, thereby developing a system
that generates route directions that are understandable
by humans (Morales et al., 2014). Inclusion of the
path layer allows robots to perform at a level equiva-
lent to that of human expert.
In evaluating guiding robots, Rosenthal et al.
demonstrated that concise route descriptions given by
RoDiL: Giving Route Directions with Landmarks by Robots
299

robots significantly reduce human attention toward
the robots (Rosenthal et al., 2022). Okuno et al. in-
dicated that it is beneficial for robots to perform ges-
tures in sync with their verbal instructions at appro-
priate times during guidance (Okuno et al., 2009). In
another study, Heikkil
¨
a showed that the characteris-
tics making human-provided guidance intuitive and
effective have a similar impact when humanoid robots
perform guiding tasks (Heikkil
¨
a et al., 2019).
Other previous studies on guiding robots focused
on generating routes. Russo et al. developed an al-
gorithm that generates low-level route directions and
simplified text by using visible landmarks along the
route in indoor environments (Russo et al., 2014).
Zheng et al. proposed a robot that uses panoramic rep-
resentations to acquire route descriptions from route
views captured during trial movements (Zheng and
Tsuji, 1992). These descriptions are then used for
giving route directions. Moreover, Zhang et al. de-
veloped a robot guiding system aimed at visually im-
paired individuals (Zhang and Ye, 2019). This system
estimates the robot’s posture by using RGB-D cam-
era images, depth data, and inertial data from an in-
ertial measurement unit (IMU), and the estimated re-
sults are applied to route planning.
In addition, other studies demonstrated the utility
of robots performing gestures. For example, Okuno
et al. demonstrated that appropriateness significantly
enhances the utility of gestures in guiding scenarios
(Okuno et al., 2009). Salem et al. revealed that
nonverbal behaviors such as hand and arm gestures,
when performed in conjunction with verbal commu-
nication, lead users to positively evaluate a robot
(Salem et al., 2011). Kim et al. discovered a corre-
lation between robots’ coordinated gestures and fac-
tors such as intimacy, homogeneity, and engagement
(Kim et al., 2012).
2.2 Communication Robots Using
Natural Language Models
Studies on using large language models, such as GPT
(Radford et al., 2018), to generate robot utterances in-
clude a study by Billing et al. (Billing et al., 2023).
They integrated GPT-3 with the Aldebaran Pepper
and Nao robots. Levoka et al. applied GPT as an
IoT service and proposed a natural language dialogue
model for interaction with humanoid robots (Lekova
et al., 2022). Zhang et al. introduced Mani-GPT, a
model that comprehends environments through object
information, understands human intentions through
dialogue, generates natural language responses to hu-
man inputs, and formulates appropriate action plans
to assist humans (Zhang et al., 2023). Mani-GPT
thereby enables generation of suitable strategies for
individual support.
2.3 Limitations of Previous Studies
Most previous studies on route explanation and gen-
eration by robots only considered scenes in which the
routes themselves do not exhibit any complexity. If
the route from the current location to the destination
is complex, it is difficult for users to understand the
route correctly, because these previous methods di-
rectly explain the complex route as it is. We should
thus reduce the quantity of utterances in robots’ route
explanations to ensure that they are comprehensible
to users.
3 RODIL
In this study, we propose RoDiL (Route Directions
with Landmarks), a robot guiding system that gives
route directions by confirming whether a user has
city knowledge and then using landmarks as starting
points for guidance when the route from the current
location to the destination is complex. Figure 2 shows
an operational diagram of RoDiL.
Upon receiving user input specifying a destina-
tion, RoDiL queries Google Maps to obtain the route
from the current location to the destination and build-
ings along the route as landmark candidates. The can-
didates are then sorted by their values of an evaluation
function, and the top three landmarks with the high-
est values are selected. RoDiL compares the routes
from the selected landmark candidates to the destina-
tion with the direct route from the current location in
terms of the number of turns. If there is at least one
appropriate landmark, RoDiL suggests landmarks to
the user in order of the fewest turns.
3.1 Input and Output
The user’s utterance is the entire input to RoDiL. The
utterance is converted to text through speech recogni-
tion and input to GPT-4 (OpenAI, 2023). Then, the
output text is vocalized and delivered as the robot’s
utterance.
3.2 Search Module
Upon receiving the user’s destination, RoDiL passes
the current location and the destination to Google
Maps. Then, by using the Directions API of Google
Maps, which outputs routes between two specified
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
300
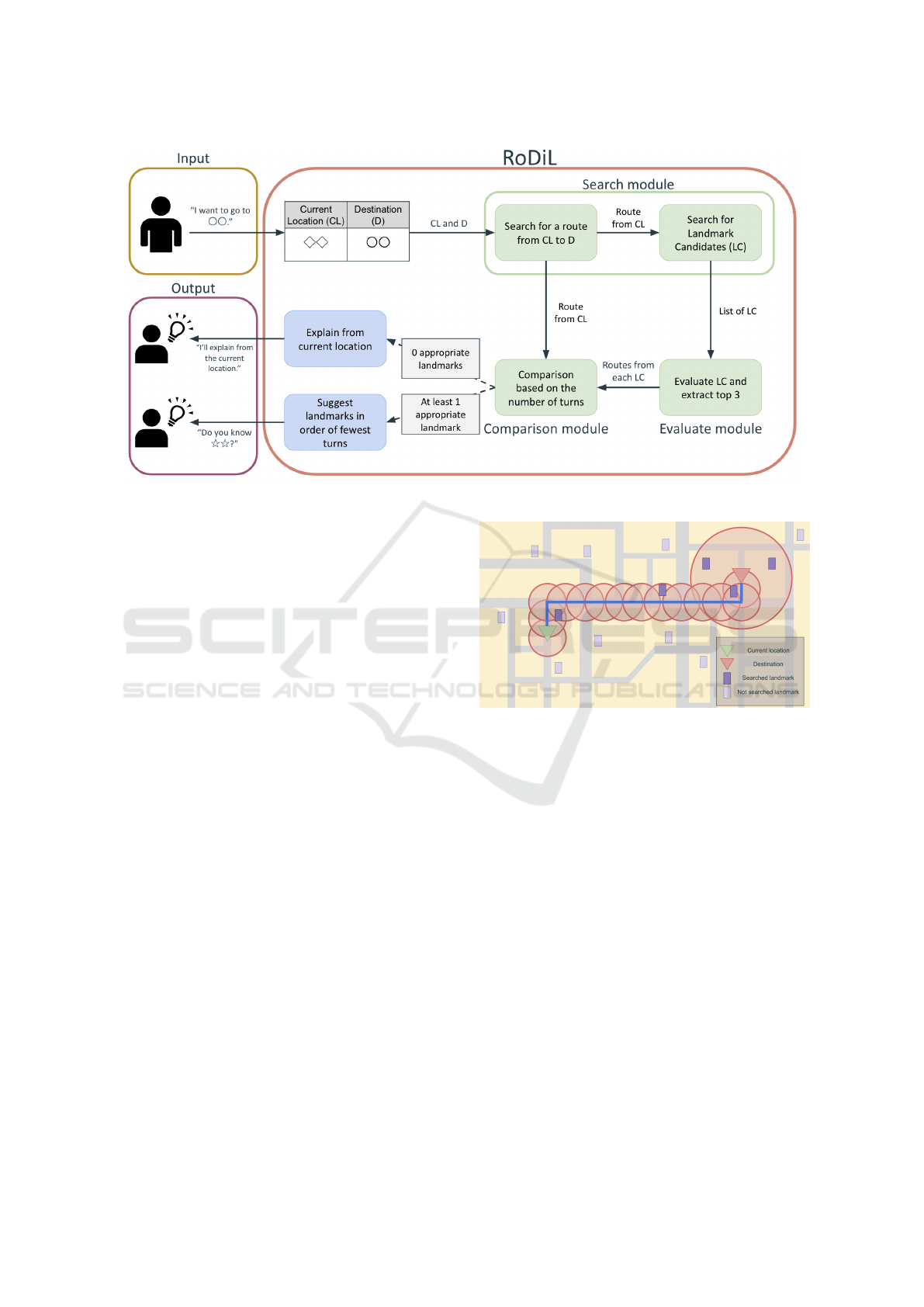
Figure 2: Operational diagram of RoDiL.
points, RoDiL obtains the route from the current lo-
cation to the destination.
Next, RoDiL searches for buildings along the ob-
tained route that could potentially serve as landmarks.
Buildings that are listed on Google Maps with at least
one review are eligible landmark candidates. The ra-
tionale behind requiring at least one review is to ex-
clude buildings, such as private homes or commer-
cial buildings, that users are presumed to be unfamil-
iar with. The Places API is leveraged to search for
buildings within a circular area centered on a specified
point. By moving the circular search area along the
route, RoDiL searches for landmark candidates. The
search radius is set to 40 meters to include buildings
on adjacent streets as landmark candidates. A simi-
lar search is also conducted within a 200-meter radius
centered on the destination. This extended search en-
ables the inclusion of buildings that are near the des-
tination, even if they are not located directly along the
route from the current location to the destination.
Figure 3 shows an example of a landmark candi-
date search. The green triangle represents the current
location, the red triangle represents the destination,
the blue line indicates the route, and the red circles
represent the search areas. The dark purple rectan-
gles represent landmark candidates that are subject to
search, whereas the light purple rectangles represent
landmark candidates that are not searched. RoDiL
outputs a list of all the identified landmark candidates.
3.3 Evaluation Module
By sorting the landmark candidates, RoDiL can ef-
ficiently propose well-known buildings that the user
Figure 3: Example of searching landmark candidates.
may be familiar with. Specifically, RoDiL sorts the
list of candidates by their values of an evaluation
function defined in Eq(1) below, where each landmark
is assigned a single value. Here, R denotes the num-
ber of reviews, W is a weight, D is the distance (in
meters) from the landmark to the destination, and T
is the number of turns from the landmark to the des-
tination. The weight W is set to 1 if the landmark is
within a circle of radius 40 m, or to 3 if it is outside
that circle but within a circle of radius 200 m.
F(Landmark) = 3R − W D − 30T (1)
RoDiL extracts the top three landmark candidates
with the highest values of the evaluation function,
thus limiting the actual proposed landmarks to a max-
imum of three.
3.4 Comparison Module
Next, RoDiL compares routes from the proposed
landmarks with the route from the current location. If
RoDiL: Giving Route Directions with Landmarks by Robots
301

the route from the current location is simpler, then it
is explained to the user. On the other hand, if the route
from the current location is more complex, then giv-
ing route directions from a landmark is used to guide
the user on a simpler route. In RoDiL, a route’s com-
plexity is determined by the number of turns. For the
three landmark candidates, RoDiL compares the cor-
responding routes with the route from the current lo-
cation in terms of the number of turns, to determine
an appropriate number of landmarks to use. The algo-
rithm operates as Algorithm 1. If there are no appro-
priate landmarks, RoDiL gives route directions from
the current location; otherwise, if there is at least one
appropriate landmark, RoDiL gives route directions
from those landmarks in ascending order of T . In
this way, it can suggest landmarks with simpler routes
first.
Data: landmark candidates l
1
,l
2
,l
3
Data: current location c
Result: list of appropriate landmarks a
initialization;
if CountTurn(c) > 3 then
for i ← 1 to 3 do
if CountTurn(l
i
) < CountTurn(c)/2
then
a.append(l
i
)
end
end
end
Algorithm 1: Determine appropriate landmarks.
3.5 Gestures
In our study, RoDiL uses the Pepper robot to give
route directions. For the robot to visualize guidance,
we prepared gestures that were shown to be effective
for guiding utterances in previous studies. Specifi-
cally, we prepared the three gestures shown in Fig-
ure 4: pointing left, pointing right, and extending an
arm forward, which respectively correspond to turn-
ing left, turning right, and going straight ahead. We
assume that the user and robot are interacting face
to face; therefore, the gestures for “left” and “right”
were designed as mirror images. The robot’s ut-
terance is segmented according to punctuation. For
each segment containing the word “left,” “right,” or
“straight,” the corresponding gesture is triggered si-
multaneously with the utterance segment.
3.6 Inquiring User’s Familiarity of
Landmarks
Here, we assume that at least one appropriate land-
mark has been identified. After suggesting a land-
Figure 4: The robot’s gestures: “left,” “right,” and “straight.
mark to the user, the user’s response is placed in one
of two categories: “familiar” and “unfamiliar.” Within
the “familiar” category, however, there are two con-
ceivable subtypes: direct acknowledgment of famil-
iarity, and indirect indication of familiarity without
explicitly stating so. Accordingly, RoDiL generates
different utterances for each of these three response
patterns: “directly familiar,” “indirectly familiar,” and
“unfamiliar.” If the response is “directly familiar,” the
robot gives route directions from the landmark. For
an “indirectly familiar” response, the robot performs
small talk about the suggested landmark before giv-
ing the directions. The purpose of small talk here is
to smooth the flow of communication. Lastly, if the
response is “unfamiliar,” the robot proposes the next
landmark, or it starts explaining from the current lo-
cation if no further landmarks exist. Figure 5 shows
conversation examples for “directly familiar” and “in-
directly familiar” responses. RoDiL determines these
three patterns using GPT-4 (OpenAI, 2023). GPT pro-
cesses the user’s utterances as input and outputs one
of the specified patterns. If the user’s response does
not fit any of the patterns, i.e. if the user does not re-
spond about recognition of landmarks, GPT outputs
“irrelevant”. For example, inputting “I know it.” re-
sults in the output “directly familiar”, while inputs
such as “I go there often.” or “The hamburgers there
are tasty, aren’t they?” yield the output “indirectly fa-
miliar”.
Figure 6 illustrates the entire procedure in a
flowchart. Following a user’s response, the robot’s
subsequent utterances are modified accordingly.
Figure 5: Differences in the robot’s utterances due to varia-
tion in the user’s responses.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
302
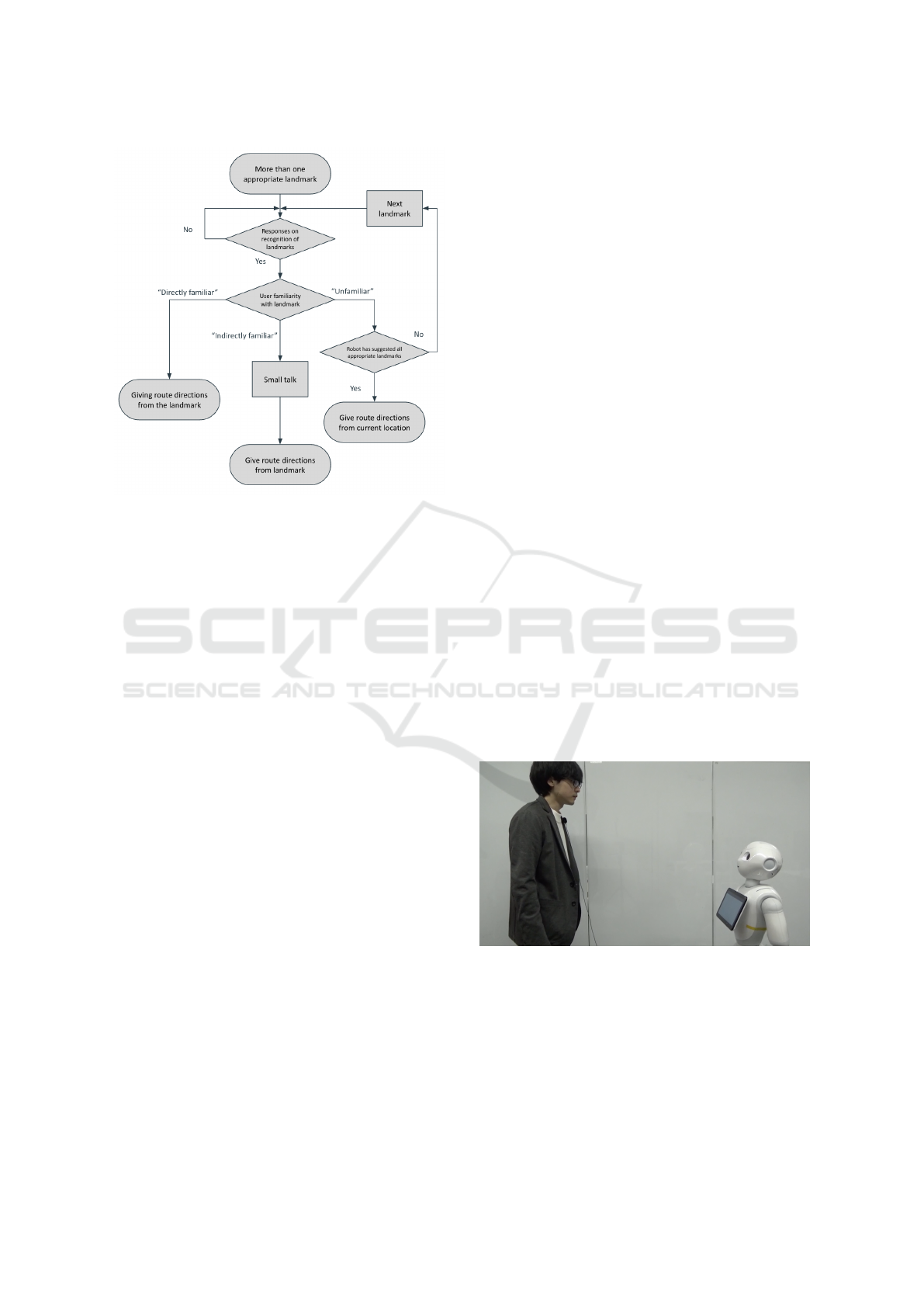
Figure 6: Flowchart of the robot’s utterances.
4 EXPERIMENT
4.1 Task Settings
To examine RoDiL’s efficacy, we conducted an exper-
iment comparing its guiding with and without land-
marks.
We chose Shibuya Station in Shibuya Ward,
Tokyo, as the location for giving route directions.
Users asked a robot, which was present near Shibuya
Station, for route directions to a destination. How-
ever, we conducted the interactions with the robot not
in the field but within the confines of a laboratory set-
ting.
4.2 Conditions
We considered the following factors: scene and guide.
Both scene and guide factors were treated as within-
subjects factors, resulting in each participant experi-
encing four conditions that combined two levels of
scene with two levels of guide.
4.2.1 Scene Factor
Scene factor has two levels: Simple and Complex.
Simple. The route from the current location to
the destination is simple. The experimental route
was from Shibuya Scramble Crossing to the Tower
Records Shibuya store. The number of turns was zero.
Complex. The route from the current location to the
destination is complex. The experimental route was
from the south exit of Shibuya Station to the Tower
Records Shibuya store. The number of turns was
seven.
4.2.2 Guide Factor
Guide factor has two levels: Without Landmarks and
With Landmarks.
Without Landmarks. Regardless of the complexity
of the route, the robot always gives route directions
from the current location.
With Landmarks. Regardless of the complexity of
the route, the robot always gives route directions from
a landmark.
4.3 Participants
We used crowdsourcing to recruit 100 participants (63
man, 36 woman, and 1 other, mean age = 42.57 years,
SD = 9.53 years) for the experiment.
4.4 Video Preparation
In this experiment, we used videos. We recorded
four interaction videos, which were created by com-
bining specific scenes with various conditions, as
listed in Table 1. Figure 7 shows an image captured
from one of the videos. RoDiL comprises two ap-
proaches: Simple-Without Landmarks and Complex-
With Landmarks. In the With Landmarks condition,
it is assumed that RoDiL identifies appropriate land-
marks, and when the robot suggested landmarks, the
user responded by indicating that he was “directly fa-
miliar” with them.
Figure 7: An image captured from one of the scenes in the
videos.
4.5 Procedures
The experimental participants were first informed that
they would view videos in which the robot gives route
directions. After viewing each video, the participants
answered a questionnaire for the video and an addi-
tional questionnaire for each scene.
RoDiL: Giving Route Directions with Landmarks by Robots
303
Table 1: Recorded Videos.
Title of Video Content
Simple - Without Landmarks
The robot gives route directions
from current location in the Simple scene.
Simple - With Landmarks
The robot gives route directions
from a landmark in the Simple scene.
Complex - Without Landmarks
The robot gives route directions
from current location in the Complex scene.
Complex - With Landmarks
The robot gives route directions
from a landmark in the Complex scene.
4.6 Measurements
The participants responded to a total of three surveys.
Surveys 1 and 2 used a seven-point response format
(where 1 is the most negative and 7 is the most posi-
tive) and were administered after the viewing of each
video. Survey 1 is outlined in Table 2, while Survey
2 comprised items from the Godspeed questionnaire
(Bartneck et al., 2009). In Survey 3, the participants
were asked to choose, in a binary single-answer for-
mat, which robot they would prefer to use in each
scene. Accordingly, Survey 1 aimed to evaluate the
guiding skill, Survey 2 assessed the robot impression,
and Survey 3 was meant for an overall evaluation.
Table 2: Survey 1 Contents.
Question
Q1 Was the guidance clear?
Q2
Could this guidance potentially
lead you to reach the destination?
Q3 Was the guidance smooth?
Q4 Was the robot skillful?
Q5
Would you like to try
using this robot?
4.7 Hypotheses and Predictions
For scenes where the route from the current location
to the destination was complex, we predicted that the
With Landmarks condition, using landmarks for sim-
ple route guiding, would enhance the guidance clar-
ity and thus improve the participants’ impression of
the robot. We thus anticipated that, for a complex
route from the current location, the With Landmarks
condition would receive higher scores on both Sur-
vey 1 and Survey 2. Moreover, we expected that a
greater number of participants would express a pref-
erence for the With Landmarks condition on Survey
3. Conversely, for scenes where the route from the
current location to the destination was simple, we pre-
dicted that the Without Landmarks condition, giving
route directions without any unnecessary conversa-
tion about landmarks, would improve both the guid-
ance clarity and the impression of the robot. There-
fore, for a simple route from the current location,
we expected that the Without Landmarks condition
would garner higher evaluations across the surveys.
From these predictions, we formulated the following
two hypotheses.
H1. When the route from the current location to the
destination is simple, the Without Landmarks condi-
tion will be perceived more favorably and evaluated
more highly.
H2. When the route from the current location to the
destination is complex, the With Landmarks condi-
tion will be perceived more favorably and evaluated
more highly.
5 RESULTS
We conducted a two-way ANOVA on the users’ re-
sponses to Surveys 1 and 2, with the significance level
set to 5%. When a significant interaction was ob-
served, we conducted multiple comparisons by the
Bonferroni method. In addition, we conducted a Chi-
squared test on the users’ responses to Survey 3, with
the significance level set to 5%.
5.1 Survey 1: Guiding Skill
Figure 8 shows the results of Survey 1: Guiding Skill.
We observed a significant interaction effect across all
items, including questions Q1 to Q5 and the over-
all average (Q1: F(1,396) = 28.13, p < 0.001, η
2
= 0.058; Q2: F(1,396) = 29.27, p < 0.001, η
2
=
0.060; Q3: F(1,396) = 26.25, p < 0.001, η
2
= 0.057;
Q4: F(1,396) = 12.83, p < 0.001, η
2
= 0.030; Q5:
F(1,396) = 16.35, p < 0.001, η
2
= 0.037; Average:
F(1,396) = 28.58, p < 0.001, η
2
= 0.062).
The results from multiple comparisons indi-
cated significant differences for Q3 between Simple-
Without Landmarks and Simple-With Landmarks
(p < 0.001), between Simple-Without Landmarks
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
304

and Complex-Without Landmarks (p < 0.001), and
between Simple-Without Landmarks and Complex-
With Landmarks (p < 0.001). For the other items,
we observed significant differences across all items
between Complex-Without Landmarks and Simple-
Without Landmarks (Q1: p < 0.001; Q2: p < 0.001;
Q4: p < 0.001; Q5: p < 0.001; Average: p < 0.001),
between Complex-Without Landmarks and Simple-
With Landmarks (Q1: p < 0.001; Q2: p < 0.001; Q4:
p < 0.001; Q5: p < 0.001; Average: p < 0.001), and
between Complex-Without Landmarks and Complex-
With Landmarks (Q1: p < 0.001; Q2: p < 0.001; Q4:
p < 0.001; Q5: p < 0.001; Average: p < 0.001).
5.2 Survey 2: Robot Impression
Next, Figure 9 shows the results of Survey 2: Robot
Impression. From the two-way ANOVA, we found a
significant interaction effect only for the item God-
speed III: Likeability (F(1,396) = 4.535, p = 0.034,
η
2
= 0.011). The results from multiple comparisons
indicated significant differences between Complex-
Without Landmarks and each of the other three
patterns: Simple-Without Landmarks (p < 0.001),
Simple-With Landmarks (p < 0.001), and Complex-
With Landmarks (p = 0.002)).
5.3 Survey 3: Overall
Lastly, Table 3 shows the results of Survey 3: Over-
all. The findings indicate that, when the route from
the current location was simple, half the participants
preferred the robot under the Without Landmarks con-
dition, while the other half preferred the robot under
the With Landmarks condition. In contrast, when the
route from the current location was complex, 80% of
the participants preferred the robot under the With
Landmarks condition. We conducted the chi-square
test, we found that there was a significant association
between the scene factor and the guide factor (χ
2
(1)
= 19.53, p < 0.001, φ = 0.31).
6 DISCUSSION
6.1 Survey 1: Guiding Skill
On Survey 1: Guiding Skill, as shown in Figure 8, we
observed significant differences between Complex-
Without Landmarks and the other three patterns for
Q1, Q2, Q4, Q5, and the average. Of particular
importance is the finding that Complex-With Land-
marks was evaluated significantly more highly than
Complex-Without Landmarks was. This result sup-
ports H2, as the With Landmarks condition was eval-
uated more highly when the route from the current
location was complex. Participants reported that
“route directions from known locations were more
understandable,” suggesting that simple route guid-
ance using landmarks was effective. Conversely, in
the case of Q3 (smoothness), Simple-Without Land-
marks was evaluated significantly more highly than
the other three patterns were. We believe that this was
because participants perceived superfluous questions
about landmarks as hindering smooth guidance.
Furthermore, the fact that Simple-Without Land-
marks was evaluated significantly more highly than
Simple-With Landmarks was supports H1, as the
Without Landmarks condition was perceived more fa-
vorably when the route from the current location was
simple. Therefore, on Survey 1, H1 was supported
by the results of Q3, while H2 was supported by the
results of all the questions besides Q3.
6.2 Survey 2: Robot Impression
On Survey 2: Robot Impression, as shown in Fig-
ure 9, we only observed a significant difference
for Godspeed III: Likeability between the Complex-
Without Landmarks pattern and the other three pat-
terns. Participants expressed concerns about delays
in the robot’s response and the loudness of its mo-
tor. We also received comments such as “The robot
was cute,” and “The robot’s behavior was charm-
ing.” These comments suggest that some participants
evaluated the robot in terms of its gestures and at-
titude, regardless of the guiding content. In this
experiment, we did not differentiate the robot’s be-
havior under each condition, which we consider to
have yielded results without significant differences.
On the other hand, for Likeability, Complex-With
Landmarks received significantly higher ratings than
Complex-Without Landmarks did. We speculate that
this was because many participants felt distrust or dis-
comfort with complex guidance under the Without
Landmarks condition. From these results, we con-
clude that H2 was supported by the results for Like-
ability on Survey 2.
6.3 Survey 3: Overall
As seen in Table 3, when the route from the current lo-
cation was complex, 80% of the participants preferred
the robot under the With Landmarks condition. These
results corroborate that the findings are not attributed
to error, as evidenced by the Chi-square test. These
results support H2.
RoDiL: Giving Route Directions with Landmarks by Robots
305
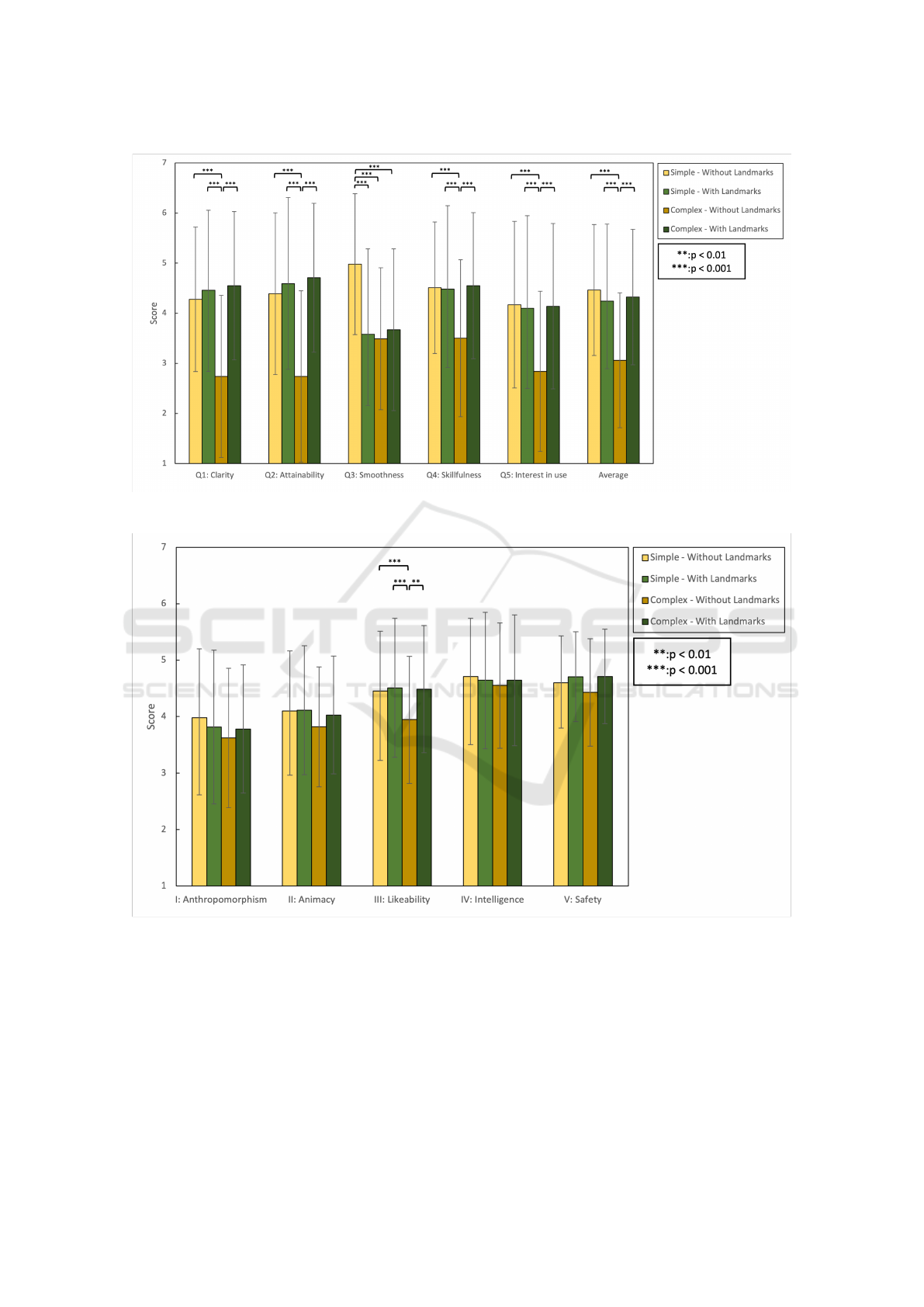
Figure 8: Results of Survey 1. The error bars represent the standard deviations.
Figure 9: Results of Survey 2. The error bars represent the standard deviations.
6.4 Summary
Upon consolidating the results of the three surveys,
we concluded that both H1 and H2 were supported.
The validation of these hypotheses indicates that,
when the route from the current location to the desti-
nation is simple, giving route directions from the cur-
rent location without using landmarks is effective. On
the other hand, when the route from the current loca-
tion is complex, the use of landmarks to give route
directions proves effective. RoDiL gives route direc-
tions without using landmarks when the route from
the current location is simple and with landmarks
when the route is complex. Thus, through this exper-
iment, we have demonstrated the efficacy of RoDiL.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
306
Table 3: Result of Survey 3.
Guide Factor
Without landmarks With landmarks
Scene Factor
Simple 51 49
Complex 21 79
6.5 Guidelines
RoDiL extracts notable buildings located near the
route from the current location to the destination. We
hypothesize that in a city with numerous such build-
ings, RoDiL would be able to identify at least one
appropriate landmark regardless of the destination or
route chosen. In addition, we presuppose that RoDiL
conducts giving route directions within a walking dis-
tance of 15 minutes. Hence, we believe that RoDiL
would be most significantly effective in urban areas
that are densely packed with notable buildings, in-
cluding, but not limited to, cities like Tokyo and New
York.
6.6 Contribution
The key contribution of this study, especially for
those involved in HRI studies, is showcasing how in-
teractions with robots can be significantly enhanced
through LLMs in specified dialogue areas. One no-
table area is guiding assistance, which is uniquely
suited to robots. Humanoid robots, being capable of
active perception and communication, enable people
to naturally ask them for directions. For example,
using a disembodied computer to seek route direc-
tions might be difficult for individuals with declining
cognitive abilities, such as the elderly. In essence,
the physical presence of a robot aids in the natu-
ral interaction needed for sharing directions, thereby
enhancing communication between humans and ma-
chines. This study envisions potential future interac-
tion experiences between humans and robots. RoDiL
demonstrates the ability to conduct navigation dia-
logue through robot interaction and to deliver clear
routes. Consequently, this study offers valuable in-
sights for developing voice dialogue-based HRI meth-
ods.
7 CASE STUDY
We also conducted a case study to investigate how
users would actually use RoDiL. We set the cur-
rent location to the south exit of Shibuya Station in
Shibuya Ward, Tokyo, although we again conducted
the case study in a laboratory. We used Pepper again,
and the participants conversed with Pepper through
voice recognition. Three participants took part in this
case study. They were first instructed to choose a
destination from the Tower Records Shibuya store,
Bunkamura, or Yoyogi Park. After making their
choice, they began interacting with the robot. Dur-
ing the interaction, the participants spoke to the robot,
which used RoDiL, and asked for route directions to
their chosen destination. These interactions were con-
ducted in Japanese.
Figure 10 shows an example from the case study
results. The participant first greeted the robot and
then asked for directions to Bunkamura. Upon de-
tecting the participant’s request, RoDiL searched for a
route from the south exit of Shibuya Station to Bunka-
mura and for landmark candidates along the way. As
a result, it selected the landmarks shown in Figure 10
as appropriate. The robot suggested SHIBUYA109,
the landmark with the highest priority, to the partici-
pant. The participant responded with “directly famil-
iar,” which prompted the robot to begin giving route
directions without engaging in small talk. The inter-
action concluded when the robot had finished explain-
ing the directions and the participant had expressed
his gratitude.
8 FUTURE WORK
There are several areas in this study that still require
further exploration. The directions currently use ab-
solute terms like north and south because of reliance
on Google Maps. To enhance user comprehension, it
would be better to use relative directions like left and
right. Also, only three participants interacted with the
robot during this study. It would be beneficial to in-
clude more participants in a case study to gather addi-
tional feedback and perspectives. Although the exper-
iments took place in a controlled laboratory environ-
ment, it is worth considering conducting field stud-
ies to test the robot in real-world settings. To sug-
gest more appropriate landmarks, refining the evalu-
ation function is essential. Presently, we recommend
a maximum of three routes with the highest evalua-
tion function scores due to computational constraints,
which might overlook other possible solutions. This
is an area that needs more research. The concept of
RoDiL: Giving Route Directions with Landmarks by Robots
307

Figure 10: Example interaction from the case study.
“indirectly familiar” has not yet been thoroughly in-
vestigated for practical use. We need more exper-
iments to understand to what extent the small talks
generated by “indirectly familiar” responses can help
users feel a sense of familiarity and connection.
9 CONCLUSION
In this study, we proposed a robot guiding system
called RoDiL (Route Directions with Landmarks) that
gives route directions using landmarks to provide a
simpler route when the route from the user’s current
location to the destination is complex. RoDiL ex-
plores the user’s knowledge of a city, and utilizing
familiar locations as landmarks for the user. Exper-
imental results have substantiated the effectiveness of
RoDiL.
This is the first study to demonstrate a significant
reduction in the quantity of guidance instructions by
utilizing landmarks located along a route as a starting
point. In addition, this study demonstrated that robots
could acquire users’ knowledge through interaction,
even in the absence of pre-existing users’ knowledge.
This result is likely to make a significant contribution
to the generation of dialogue in HRI. There are three
possible future works. The first involves improving
the landmark selection mechanism, especially the fit-
ting of the evaluation function. The second involves
investigating the usefulness of a system that decides
whether to incorporate small talk according to the
user’s responses. The third future work entails evalu-
ating RoDiL’s usability by having users interact with
a robot using RoDiL in a real-world setting.
ACKNOWLEDGEMENTS
This study was supported by JST CREST Grant Num-
ber JPMJCR19A1, Japan.
REFERENCES
Bartneck, C., Kuli
´
c, D., Croft, E., and Zoghbi, S. (2009).
Measurement instruments for the anthropomorphism,
animacy, likeability, perceived intelligence, and per-
ceived safety of robots. International Journal of So-
cial Robotics, 1:71–81.
Billing, E., Ros
´
en, J., and Lamb, M. (2023). Lan-
guage models for human- robot interaction. In HRI
’23: Companion of the 2023 ACM/IEEE International
Conference on Human-Robot Interaction, pages 905–
906.
Brown, T. B., Mann, B., Ryder, N., Subbiah, M., Kaplan,
J. D., Dhariwal, P., Neelakantan, A., Shyam, P., Sas-
try, G., Askell, A., Agarwal, S., Herbert-Voss, A.,
Krueger, G., Henighan, T., Child, R., Ramesh, A.,
Ziegler, D. M., Wu, J., Winter, C., Hesse, C., Chen,
M., Sigler, E., Litwin, M., Gray, S., Chess, B., Clark,
J., Berner, C., McCandlish, S., Radford, A., Sutskever,
I., and Amodei, D. (2020). Language models are few-
shot learners. In Advances in Neural Information Pro-
cessing Systems, pages 1877–1901.
Heikkil
¨
a, P., Lammi, H., Niemel
¨
a, M., Belhassein, K.,
Sarthou, G., Tammela, A., Clodic, A., and Alami, R.
(2019). Should a robot guide like a human? a quali-
tative four-phase study of a shopping mall robot. In
International Conference on Social Robotics, pages
548–557.
Kanda, T., Shiomi, M., Miyashita, Z., Ishiguro, H., and
Hagita, N. (2010). A communication robot in a
shopping mall. IEEE Transactions on Robotics,
26(5):897–913.
Kato, S., Ohshiro, S., Itoh, H., and Kitamura, K. (2004).
Development of a communication robot ifbot. In 2004
IEEE International Conference on Robotics and Au-
tomation (ICRA), pages 697–702.
Kim, A., Kum, H., Roh, O., You, S., and Lee, S. (2012).
Robot gesture and user acceptance of information in
human-robot interaction. In HRI ’12: Proceedings of
the Seventh Annual ACM/IEEE International Confer-
ence on Human-Robot Interaction, pages 279–280.
Kim, Y. and Yoon, W. C. (2014). Generating task-oriented
interactions of service robots. IEEE Transactions on
Systems, Man, and Cybernetics: Systems, 44(8):981–
994.
Lekova, A., Tsvetkova, P., Tanev, T., Mitrouchev, P., and
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
308

Kostova, S. (2022). Making humanoid robots teaching
assistants by using natural language processing (nlp)
cloud-based services. Journal of Mechatronics and
Artificial Intelligence in Engineering, 3(1):30–39.
Luna, K. L., Palacios, E. R., and Marin, A. (2018). A
fuzzy speed controller for a guide robot using an
hri approach. IEEE Latin America Transactions,
16(8):2102–2107.
Morales, Y., Satake, S., Kanda, T., and Hagita, N. (2014).
Building a model of the environment from a route per-
spective for human–robot interaction. International
Journal of Social Robotics, 7:165–181.
Okuno, Y., Kanda, T., Imai, M., Ishiguro, H., and Hagita, N.
(2009). Rproviding route directions: Design of robot’s
utterance, gesture, and timing. In HRI ’09: Proceed-
ings of the 4th ACM/IEEE International Conference
on Human Robot Interaction, pages 53–60.
OpenAI (2023). GPT-4 Technical Report.
Oßwald, S., Kretzschmar, H., Burgard, W., and Stach-
niss, C. (2014). Learning to give route directions
from human demonstrations. In 2014 IEEE In-
ternational Conference on Robotics and Automation
(ICRA), pages 3303–3308.
Pitsch, K. and Wrede, S. (2014). When a robot orients
visitors to an exhibit. referential practices and inter-
actional dynamics in real world hri. In The 23rd IEEE
International Symposium on Robot and Human Inter-
active Communication, pages 36–42.
Radford, A., Kim, J. W., amd A. Ramesh, C. H., Goh, G.,
Agarwal, S., Sastry, G., Askell, A., Mishkin, P., Clark,
J., Krueger, G., and Sutskever, I. (2021). Learning
transferable visual models from natural language su-
pervision. In Proceedings of the 38th International
Conference on Machine Learning, pages 8748–8763.
Radford, A., Narasimhan, K., Salimans, T., and Sutskever,
I. (2018). Improving Language Understanding by
Generative Pre-Training.
Richter, K. (2008). Context-specific route directions. KI,
22:39–40.
Richter, K. and Klippel, A. (2005). A model for context-
specific route directions. In Spatial Cognition IV. Rea-
soning, Action, Interaction, pages 58–78.
Rosenthal, S., Vichivanives, P., and Carter, E. (2022). The
impact of route descriptions on human expectations
for robot navigation. ACM Transactions on Human-
Robot Interactions, 11(35):1–19.
Russo, D., Zlatanova, S., and Clementini, E. (2014). Route
directions generation using visible landmarks. In ISA
’14: Proceedings of the 6th ACM SIGSPATIAL In-
ternational Workshop on Indoor Spatial Awareness,
pages 1–8.
Salem, M., Rohlfing, K., Kopp, S., and Joublin, F. (2011).
A friendly gesture: Investigating the effect of multi-
modal robot behavior in human-robot interaction. In
2011 20th IEEE International Conference on Robot
and Human Interactive Communication (RO-MAN),
pages 247–252.
Shah, D., Eysenbach, B., Kahn, G., Rhinehart, N., and
Levine, S. (2021). Ving: Learning open-world
navigation with visual goals. In 2021 IEEE In-
ternational Conference on Robotics and Automation
(ICRA), pages 13215–13222.
Shah, D., Osi
´
nski, B., Ichter, B., and Levine, S. (2023). Lm-
nav: Robotic navigation with large pre-trained models
of language, vision, and action. In Proceedings of the
6th Conference on Robot Learning, pages 492–504.
Triebel, R., Arras, K., Alami, R., Beyer, L., Breuers, S.,
Chatila, R., Chetouani, M., Cremers, D., Evers, V.,
Fiore, M., Hung, H., Ram
´
ırez, O. A. I., Joosse, M.,
Khambhaita, H., Kucner, T., Leibe, B., Lilienthal,
A. J., Linder, T., Magnusson, M., Okal, B., Palmieri,
L., Rafi, U., van Rooij, M., and Zhang, L. (2016).
Spencer: A socially aware service robot for passenger
guidance and help in busy airports. In Field and Ser-
vice Robotics: Results of the 10th International Con-
ference, pages 607–622.
Waldhart, J., Clodic, A., and Alami, R. (2019). Reasoning
on shared visual perspective to improve route direc-
tions. In 2019 28th IEEE International Conference on
Robot and Human Interactive Communication (RO-
MAN), pages 1–8.
Wall
´
en, J. (2008). The History of the Industrial Robot.
Link
¨
oping: Link
¨
oping University Electronic Press.
Zhang, H. and Ye, C. (2019). Human-robot interaction for
assisted wayfinding of a robotic navigation aid for the
blind. In 2019 12th International Conference on Hu-
man System Interaction (HSI), pages 137–142.
Zhang, Z., Chai, W., and Wang, J. (2023). Mani-gpt: A
generative model for interactive robotic manipulation.
Procedia Computer Science, 226:149–156.
Zheng, J. Y. and Tsuji, S. (1992). Panoramic representation
for route recognition by a mobile robot. International
Journal of Computer Vision, 9:55–76.
RoDiL: Giving Route Directions with Landmarks by Robots
309
