
Multiple Crack Detection in Beam-Like Structures Using a Novel
Particle Swarm Optimization Approach
Flaviu-Catalin Florea
4 a
, Horea Grebla
1 b
, Gilbert-Rainer Gillich
2 c
,
Bogdan Nicus
,
or Bindea
5 d
and Catalin V. Rusu
1,3 e
1
Department of Computer-Science, Babes-Bolyai University, Romania
2
Department of Engineering Science, Babes-Bolyai University, Romania
3
Department of Computer Science, Institute of German Studies, Babes-Bolyai University, Romania
4
Department of Computer Science, Aarhus University, Denmark
5
Department of Computer Science, Technical University of Cluj-Napoca, Romania
Keywords:
Damage Detection, Natural Frequencies, Cost Function, Particle Swarm Optimization.
Abstract:
This paper presents a method for assessing two cracks in simply supported beams by identifying their locations
and severities (depths). Our method is based on applying the Particle Swarm Optimization (PSO) algorithm
with the measured natural frequencies for several bending vibration modes of an intact and cracked beam. We
are using calculated relative frequency shifts (RFS) for eight vibration modes for all possible damage cases
using a mathematical relation deduced in previous researches. We detect changes, calculate the RFSs and
then subtract, separately for all modes, the measured RFSs from all calculated RFSs. Considering previously
demonstrated applications of PSO for one crack detection, we propose strategies to enable PSO to determine
locations in scenarios involving two cracks. Our method is successful in accurately identifying two damage
locations and severities.
1 INTRODUCTION
Fault detection in beam-like structures is an important
research field as it has real-life implications, from sav-
ing time, money and even lives, if cracks are detected
in early stages. There are several studies that use non
invasive methods to identify the location and depth of
one crack in beam like structures. There are however
only a few such studies that deal with multiple cracks
at the same time. Most related work involving Evo-
lutionary Algorithms focuses on Genetic Algorithms
(GA), but in this study our focus is on Particle Swarm
Optimization (PSO). To our knowledge, no prior work
uses the Equivalent Healthy Beam (EHB) model with
Evolutionary Algorithms for damage prediction.
Mohan, Maiti and Maity evaluated PSO and GA
in multiple crack detection (Mohan et al., 2013). PSO
outperformed GA in accuracy and robustness, consis-
tently providing more reliable predictions. They used
the Frequency Response Function (FRF) model on a
a
https://orcid.org/0009-0009-2479-6588
b
https://orcid.org/0000-0002-8529-5797
c
https://orcid.org/0000-0003-4962-2567
d
https://orcid.org/0009-0000-7045-2043
e
https://orcid.org/0000-0002-2056-8440
simple cantilever beam, demonstrating that combin-
ing FRF with PSO enhances accuracy. Khatir et al.
(Khatir et al., 2017) also compared GA and PSO for
detecting cracks in composite beams. PSO proved su-
perior in accuracy, efficiency, and robustness, espe-
cially with noise in the modal data, guiding the objec-
tive function using the Modal Assurance Criterion.
Greco et al. (Greco et al., 2018) proposed a static
method using GA and a closed-form solution based
on a rotational spring model for multiple crack detec-
tion. This method, implemented in the NetLogo en-
vironment, showed effective crack identification un-
der various conditions. Khai and Mehrjoo (Khaji and
Mehrjoo, 2014) introduced a new beam element capa-
ble of including multiple transverse edge cracks. Us-
ing GA, they solved an inverse problem to determine
crack specifics, validating their method against 2D fi-
nite element analyses and experimental data. Zheng,
Liang, Wang and Fan (Zheng et al., 2014) used a Hi-
erarchical Genetic Algorithm (HGA) with the same
model as the one used in (Khaji and Mehrjoo, 2014),
proving HGA’s superiority over simple GA in reduc-
ing finite element computations and avoiding prema-
ture convergence. Sahu, Kumar, and Parhi developed
a hybrid method (CSAGA) combining GA with the
334
Florea, F.-C., Grebla, H., Gillich, G.-R., Bindea, B. N. and Rusu, C. V.
Multiple Crack Detection in Beam-Like Structures Using a Novel Particle Swarm Optimization Approach.
DOI: 10.5220/0013131400003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 3, pages 334-342
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

clonal selection algorithm (Sahu et al., 2018). This
method improved accuracy in locating cracks and as-
sessing their severity by examining changes in natural
frequencies. Moradi and Kargozarfard (Moradi and
Kargozarfard, 2013) introduced the Bees Algorithm
for multiple crack detection, using changes in eigen-
frequencies and strain energy parameters to optimize
a damage index vector. This method effectively iden-
tified the number and locations of cracks.
Machine learning approaches, primarily using Ar-
tificial Neural Networks (ANN), are less common
in crack detection. Maurya, Mishra and Panigrahi
demonstrated ANN’s effectiveness in structural anal-
ysis, using the first three relative natural frequen-
cies to predict crack locations and depths accurately
(Maurya et al., 2018). Pop, Tufisi, and Gillich (Pop
et al., 2022) optimized an ANN through feedfor-
ward backpropagation to pinpoint crack positions in
a 1000mm cantilever steel beam with high precision.
Their model utilized the first five natural frequencies,
highlighting the impact of crack proximity on modal
response.
In multiple crack detection for beam-like struc-
tures, GAs and the rotational spring model are pre-
dominant. However, each study achieves different
error percentages based on varying beam properties,
making direct comparisons difficult. Most studies re-
port errors close to 2%, 1%, or even 0%.
Nevertheless, we found no study up to date to
tackle the problem from the point of view of the
Equivalent Healthy Beam model and Particle Swarm
Optimization. Hence, we propose a new approach for
multiple damage detection.
2 THEORETICAL BACKGROUND
2.1 Particle Swarm Optimization
Particle Swarm Optimization (PSO) is a method
within evolutionary computation in artificial intelli-
gence (AI), inspired by natural behaviors such as bird
flocking and fish schooling. Imagine a flock of birds:
when one bird finds a good spot for food, others fol-
low, adjusting their paths. Similarly, in PSO, each
”particle” (representing a potential solution) moves
through the solution space, learning from its own ex-
periences and those of others. Each particle keeps
track of its best position and is influenced by the best
position found by the swarm.
PSO success hinges on balancing exploration
(scouting new areas) and exploitation (refining known
good areas). This balance is managed through key
settings:
• Inertia Weight (w): Helps particles move. A
higher weight in the early stages encourages broad
exploration, while a reduced weight later on helps
fine-tune solutions.
• Cognitive Coefficient (c1): Influences a particle
based on its past success, encouraging it to revisit
or stay near promising solutions.
• Social Coefficient (c2): Influences a particle
based on the swarm’s best-found solution, pro-
moting a collective approach.
The velocity and position of each particle are up-
dated using:
v
k+1
= w ·v
k
+ c1 ·r1
·(pbest
i
−x
i
) + c2 ·r2) ·(gbest −x
i
) (1)
x
i
= x
i
+ v
k+1
(2)
where v
k
and v
k+1
are the current and next veloc-
ities of particle i, w is the inertia parameter, c1 is the
cognitive parameter, c2 is the social parameter, pbest
i
is the best position of particle i, gbest is the best posi-
tion of the swarm, x
i
is the current position of particle
i, and r1 and r2 are random numbers between 0 and
1.
Topology, which dictates how particles commu-
nicate, is crucial in Particle Swarm Optimization.
Within a global topology, every particle communi-
cates with all others, quickly sharing the best solu-
tions. In contrast, a local topology restricts commu-
nication to nearby particles, encouraging more inde-
pendent exploration. This choice affects how swiftly
the swarm converges and how well it finds optimal
solutions.
We will go into more depth about the steps we
took to get our PSO model to correctly anticipate two
defects in a cantilever beam in the upcoming chapters.
The techniques and experiments, ranging from hyper-
parameter tweaking to several unique approaches, are
covered in the next chapters.
2.2 Relative Frequency Shift for One
Crack Scenario
A crack in a beam decreases the rigidity of a specific
area, affecting its vibration. This is seen as changes in
eigenfrequencies, which are the natural vibration fre-
quencies of the structure. For a thought experiment,
imagine a cantilever beam, fixed at one end and free at
the other. If one were to push it down on the free end
and then release it, the beam will vibrate at a specific
frequency. If there is a crack at a point c with depth
Multiple Crack Detection in Beam-Like Structures Using a Novel Particle Swarm Optimization Approach
335

d, the beam will be weaker at that point, causing it to
bend more under the same pressure.
To model this, we use the Equivalent Healthy
Beam (EHB) model (Gillich et al., 2019). This model
suggests that a beam with a crack behaves like a thin-
ner, uniformly healthy beam with the same deflection
at the free end. According to Castigliano’s theorem,
both beams store the same energy and oscillate at the
same frequency.
The relationship between the deflection δ at the
free end and the eigenfrequency f
i
is:
f
i
=
λ
2
i
2π
r
g
8δ
(3)
where λ
i
is the eigenvalue for each i vibration
mode and g is the gravitational constant. The deflec-
tion δ for the healthy beam is:
δ =
pgAL
4
8EI
(4)
where L is the length of the beam, A is the cross-
sectional area (A = width×height), p is the mass den-
sity, E is the Young’s modulus, and I is the moment
of inertia. The constant 8 comes from the boundary
conditions of the beam (Gillich et al., 2021).
Cracks deepen at point c to d, making the free
end bend more (δ(c,d)). The healthy beam needs less
area (A(c,d)) and less bending resistance (I(c,d)) to
match. Both vibrate the same because they store the
same energy, and you calculate the damaged beam’s
frequency like this:
f
i
(c,d) =
λ
2
i
2π
r
g
8δ(c,d)
(5)
This leads to:
f
i
(c,d) = f
i
s
δ
δ(c,d)
(6)
A crack at c = 0, where the curvature is maxi-
mum, will cause the greatest increase in deflection
and the largest decrease in frequency. In the litera-
ture, it’s called the Equivalent Healthy Beam (EHB).
It’s the least stiff among healthy beams used to model
a crack of a certain depth. We assign a damage sever-
ity coefficient, γ, to the crack, calculated as shown in
(Praisach et al., 2013).
γ(0,d) =
p
δ(0,d) −
√
δ
p
δ(0,d)
(7)
As shown in Figure 1, a beam with a crack at lo-
cation c has higher deflection than a healthy beam but
the same deflection as an EHB with the crack at c = 0.
Figure 1: The 2 models of a beam; one with a crack at loca-
tion c and one with the crack at the fixed end.
The frequency drop ∆ f
i
for a crack at c = 0 is:
∆ f
i
(0,d) = f
i
− f
i
(0,d) = f
i
1 −
s
δ
δ(0,d)
!
= f
i
p
δ(0,d) −
√
δ
p
δ(0,d)
= f
i
γ(0,d)
(8)
For a general crack position c:
∆ f
i
(c,d) = f
i
− f i(c, d) = f
i
p
δ(c,d) −
√
δ
p
δ(c,d)
(9)
The damage severity γ can be related to the
normalized modal curvature
φ
”
i
(c)
2
(Gillich and
Praisach, 2014):
γ(c,d) =
p
δ(c,d) −
√
δ
p
δ(c,d)
=
p
δ(0,d) −
√
δ
p
δ(0,d)
φ
”
i
(c)
2
= γ(0,d)
φ
”
i
(c)
2
(10)
where
φ
”
i
(c)
2
is the normalized modal curvature,
indicating the local curvature’s effect due to bending.
For cantilever beams, the normalized curvature is:
φ
”
i
(x) = 0.5
{
cos(λ
i
x) + cosh(λ
i
x)
−
cos(λ
i
) + cosh(λ
i
)
sin(λ
i
) + sinh(λ
i
)
(sin(λ
i
x) + sinh(λ
i
x))
(11)
The frequency drop for a crack at c is:
∆ f
i
(c,d) = f
i
·γ(0,d) ·
φ
”
i
(c)
2
(12)
The Relative Frequency Shift (RFS) for a can-
tilever beam with one crack is:
∆ f
i
(c,d) = γ(0,d)·
φ
”
i
(c)
2
(13)
This allows quick calculation of RFS for any crack
depth and location, crucial for our PSO model.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
336

2.3 Relative Frequency Shift for
Multiple Cracks Scenario
When multiple cracks are present, each crack inde-
pendently alters the stiffness of the beam and affects
modal parameters, such as natural frequencies, mode
shapes and damping factors. If the cracks are suffi-
ciently far apart (more than 5mm), the superposition
principle applies, allowing the effects to be consid-
ered independently (Gillich et al., 2021).
The total RFS for two cracks is:
∆ f
i
(c1,d1,c2,d2) = ∆ f
i
(c1,d1) + ∆ f
i
(c2,d2) (14)
Experiments show that for cracks at least 5mm
apart, the EHB model applies with less than 0.005%
error (Gillich et al., 2021).
In our study, we use these relations to calculate
RFSs for any crack combination. This allows us to
train our PSO model on various crack scenarios, solv-
ing the optimization problem of identifying damage
properties from RFS data.
3 APPROACH AND
METHODOLOGY
For our simulations we will consider a cantilever
beam of 1000mm in length and a depth of 20mm.
We will be using a GeneralOptimizer PSO from
the Pyswarms library (PYS, ) as our PSO model. The
following is the form of the objective function that the
model must optimize:
f (solution) = −
∑
8
i=1
(RFS
i
(solution) −InputRFS
i
)
2
−5
(15)
where RFS
i
is the function from equation 14, i de-
notes the frequency modes, the solution denotes two
places and two depths for the cracks, and InputRFS
i
denotes the relative frequencies shifts received as in-
put for the fractured beam.
Going forward, whenever we discuss the charac-
teristics of a fractured beam (or target) using a 4-value
array such as [0.12, 0.65, 0.34, 1.34], the first two val-
ues, 0.12 and 0.65, denote the locations of the cracks
on a scale ranging from 0 to 1, while the final two val-
ues, 0.34 and 1.34, represent the depths of the cracks
on a scale ranging from 0 to 2. For locations, the
boundaries of the space search are therefore [0 - 1]
and for depths, [0 - 2]. The RFS equation will be used
to construct the InputRFS
i
when we test our model by
creating random targets using the previously outlined
structure.
The following formula is used to calculate the er-
ror:
err(predicted) =
|predicted −real|
length of interval
∗100 (16)
The length of the interval is 1 −0 = 1 in the case
of location and 2 −0 = 2 in the case of depth.
3.1 Hyper-Parameters Tuning
We employed an exhaustive search (GridSearch) to
optimize the parameters c1, c2, and w. Initially, we
used 100 particles and 200 iterations, exploring the
range [0.0 - 1.0] for each parameter with a target of
[0.2, 0.3, 0.2, 0.1] and a Star topology. The opti-
mal parameters found were c1 = 0.4, c2 = 0.5, and
w = 0.1, but predictions with these settings were in-
consistent, with errors up to 80
To address this, we ran GridSearch on 48 random
targets, saving the parameters and costs after each run,
and computed weighted averages: c1 = 0.4, c2 = 0.6,
and w = 0.2. Despite the close similarity to the initial
results, the error remained unsatisfactory.
We manually tested a broader range of values, dis-
covering that higher c1 values improved performance
due to the function’s numerous local minima. Even-
tually, we identified c1 = 3, c2 = 0.25, and w = 0.5
as promising settings, occasionally achieving errors
close to 1%.
To validate these findings, a comprehensive Grid-
Search with c1 and c2 in [0.2 - 5] and w in [0.1
- 1.1] was conducted, targeting [0.05878, 0.08467,
0.49865, 0.25434]. The results, c1 = 4.2, c2 = 0.6,
and w = 1.0, confirmed the need for higher c1. How-
ever, due to concerns about local minima, we retained
c1 = 3, c2 = 0.25, and w = 0.5. Despite these adjust-
ments, error rates varied from 0.5% to 36%.
Further experimentation revealed the Ring topol-
ogy to be more effective than the Star topology. The
Ring topology limits communication to a finite num-
ber of neighbours, enhancing exploration and reduc-
ing the risk of convergence to local minima. We found
that 50 neighbors per particle yielded the best results,
regardless of total particle count (100, 200, or 700).
Finally, increasing the number of iterations from
200 to 1000 and the total number of particles from
100 to 700 was necessary for proper convergence.
However, we later found that increasing the number
of particles to 700 was not the most effective strategy,
as will be discussed in the subsequent sections.
We conducted a comprehensive set of tests to
identify the subintervals where the model performs
well and where it encounters difficulties. The loca-
tion interval was divided into four subintervals: [0.0 -
0.1], [0.1 - 0.8], [0.8 - 0.9], and [0.9 - 1.0], while the
Multiple Crack Detection in Beam-Like Structures Using a Novel Particle Swarm Optimization Approach
337
depth interval was divided into: [0.0 - 0.1], [0.1 - 0.5],
[0.5 - 1.7], and [1.7 - 2.0]. We created 256 test cases
using these location and depth values.
The error for each test case was calculated by av-
eraging four errors (two for locations and two for
depths). The model exhibited significant challenges
when the depth was near 0 or close to 2, which,
despite being practical for monitoring beam failure,
highlighted its limitations. The model performed bet-
ter for depths between 0.1 and 1.7, though inconsis-
tencies persisted.
Notably, the model struggled with locations near
the clamped end or the free end, particularly within
the intervals [0.0 - 0.1] and [0.9 - 1.0]. This indicates
specific areas where the model’s accuracy needs im-
provement.
3.2 Our Approach
Observations of the model’s performance indicated
that results varied significantly for the same target,
with error rates ranging from less than 1% to over
10%. To address this inconsistency, we implemented
a strategy of running the model multiple times and
aggregating the results.
First, we determined that the model performed
similarly with 100 particles compared to 700 particles
if the number of iterations was increased. Thus, we
increased the iterations from 1000 to 3000 and ran the
model three and five times per target. This approach
improved overall performance but required subjective
interpretation to identify the best results from multi-
ple runs, as shown in Table 1.
Table 1: Multiple runs per target results.
# runs Error Location error Depth error
3 5.7517% 4.1953% 5.9317%
5 3.8481% 2.2716% 3.1317%
For instance, we could obtain the optimal number
for the first location from the first run of the model,
and the optimal number for the second location from
the third run, if we ran the model three times for a
target.
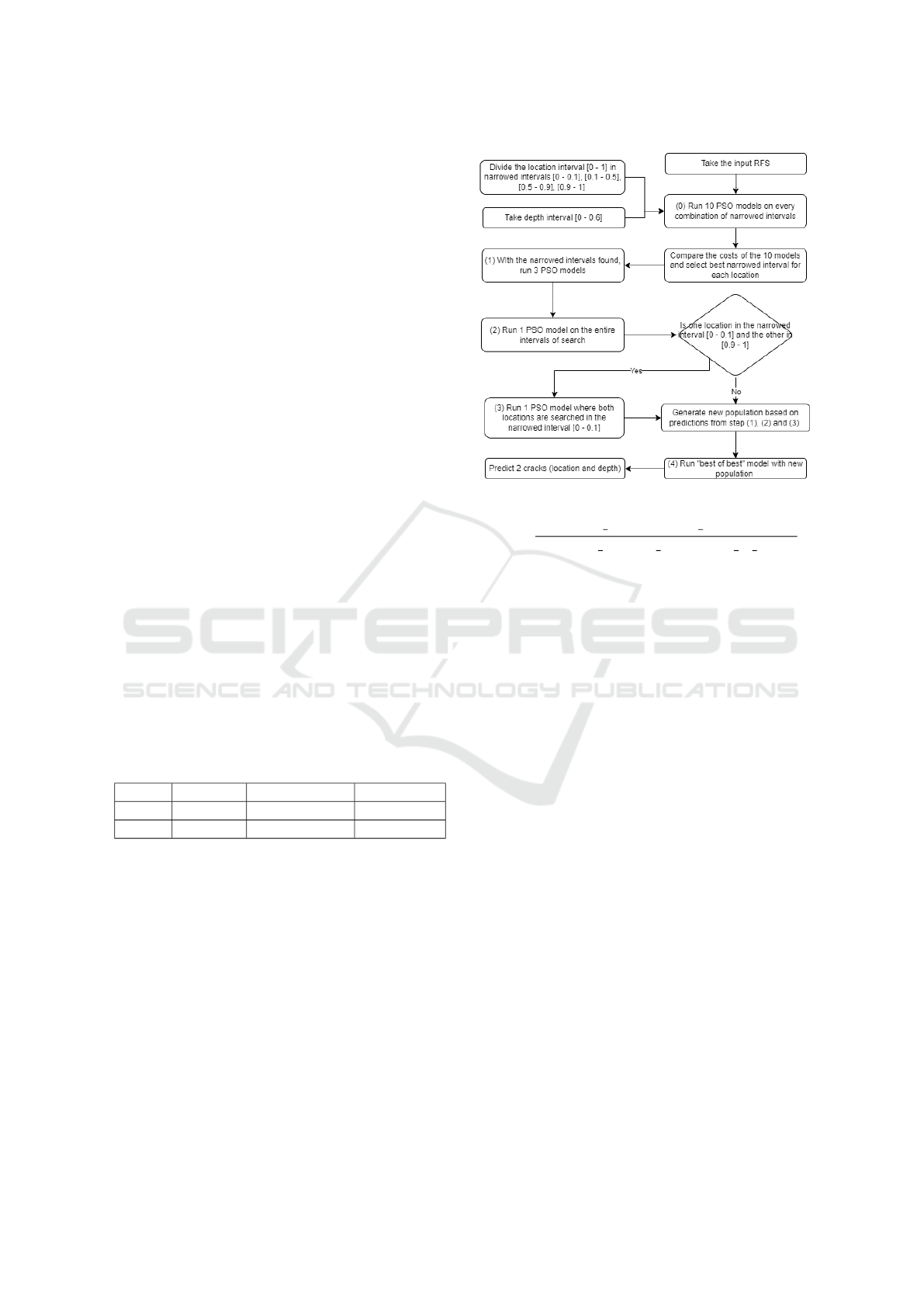
To address this shortcoming we developed a novel
”Best-of-Best” approach that involves merging out-
comes from various iterations and honing a swarm
population in order to create a new PSO model. Fig-
ure 2 shows our approach.
Our refined PSO model thus creates a new swarm
population based on the best results from multiple
runs. For each result, we generated additional par-
ticles by slightly adjusting the predicted locations and
depths using a calculated step value, as in formula:
Figure 2: Flowchart of proposed algorithm.
step =
upper bound −lower bound + 3
additional particles needed//nr of results
(17)
where // is the floor division and the upper
b
ound
and lower
b
ound are the intervals of search. For ex-
ample, if we wanted to calculate the step for location,
given 10 results and a new population of 200, the step
would equal (1 −0 + 3)/(190//10) = 4/19 ≈ 0.21.
With this step, the new particles would be created by
adding to each predicted location a random number
from the interval (−step,step).
Our updated PSO model required appropriate
hyper-parameters, which we determined through
GridSearch and manual testing. We found that c1 = 3,
c2 = 0.2, and w = 0.4 worked best, with a Ring topol-
ogy and 40 neighbours. We also increased the number
of particles from 100 to 200.
Testing this new model, we ran it 5 and 10 times
for the same target, collected the results, and ran a fi-
nal ”Best-of-Best” PSO model. Although the overall
performance error was not significantly higher than
before, the location detection improved considerably,
achieving a low error of 0.71%, while depth detection
was less accurate at 4.79% in the 10 runs scenario (Ta-
ble 2, row 1 and 2).
The ”Best-of-Best” model not only selected the
best results from previous runs but also occasionally
identified better predictions by centring the new pop-
ulation around the prior best results.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
338
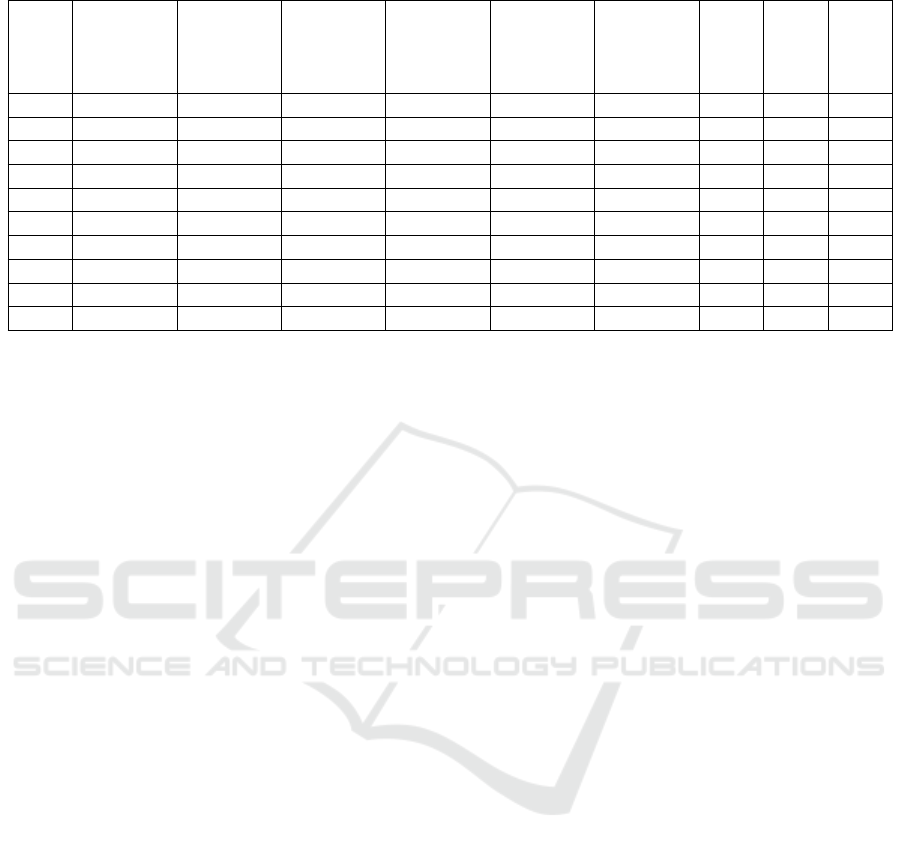
Table 2: Performance overview.
Nr. Runs on
entire
intervals
Runs
with
narrowed
intervals
Runs on
low locs
interval
Depth
narrowed
intervals
Y/N
Loc
bounds
Depth
bounds
Avg
err
%
Avg
loc
err
%
Avg
depth
err
%
1 5 - - - [0 - 1] [0 - 2] 5.96 2.93 8.99
2 10 - - - [0 - 1] [0 - 2] 2.75 0.71 4.79
3 2 5 1 or 3 Y [0 - 1] [0 - 2] 3.73 2.44 5.01
4 0 5 1 or 3 N [0 - 1] [0 - 2] 4.83 3.77 5.89
5 2 5 1 or 3 N [0 - 1] [0 - 2] 3.38 0.66 6.10
6 2 5 1 or 3 N [0 - 1] [0 - 1] 1.30 1.35 1.26
7 5 - - - [0 - 1] [0 - 1] 1.86 1.72 1.99
8 2 5 1 or 3 N [0 - 0.99] [0 - 1] 0.76 0.72 0.81
9 1 3 1 N [0 - 1] [0 - 0.3] 1.27 0.80 1.75
10 1 3 1 N [0 - 1] [0 - 0.6] 1.06 0.89 1.23
3.2.1 Improving the Performance Using
Narrowed Intervals of Search
One can however notice that the model’s error mar-
gin was minimal when it successfully identified the
target, but significantly escalated (up to 30%) when
it failed. This led us to conclude that narrowing the
search intervals would improve precision. We divided
the location range [0 - 1] into four smaller intervals:
[0 - 0.1], [0.1 - 0.5], [0.5 - 0.9], and [0.9 - 1]. PSO
models were executed within these intervals, result-
ing in ten runs to cover all combinations. A similar
approach was applied to the depth range [0 - 2], di-
viding it into: [0.0 - 0.2], [0.2 - 1], [1 - 1.8], and [1.8
- 2].
Next, we ran 5 PSO models to search within these
new narrowed intervals of search and 2 PSO models
over the entire intervals ([0 - 1] for location and [0
- 2] for depth) to maintain diversity in the popula-
tion of the ”best of best” model. We noticed that the
model often misinterpreted cases where both cracks
were close to the clamped end, within [0 - 0.1], some-
times detecting one crack in [0 - 0.1] and the other at
[0.9 - 1]. To address this, we added a check to run ad-
ditional PSO models if only one damage was detected
in the [0 - 0.1] subinterval.
Summarizing the algorithm steps: run 10 PSO
models for the best narrowed intervals for locations
and depths; run 5 PSO models within these intervals;
run 2 PSO models over the entire intervals; if neces-
sary, run additional PSO models within the [0 - 0.1]
interval. This process is followed by the ”best of best”
PSO model.
However, the algorithm’s performance was unsat-
isfactory, as shown in Table 2, row 3: average error
of 3.73%, location error of 2.44%, and depth error
of 5.01%. The 10 runs for narrowed depth intervals
often produced misleading outcomes, and removing
the 2 runs over entire intervals worsened results to an
average error of 4.83% (row 4). Reintroducing the 2
runs improved the location error to 0.66% (row 5), but
the depth error remained high.
Given the impracticality of predicting cracks
deeper than half the beam’s height, we revised the
depth search range to [0 - 1], which significantly re-
duced the depth error to 1.26%, although location er-
ror slightly increased (row 6).
The significant difference between tests 5 and 6
led us to question whether the technique we used to
try to focus our search for cracks was really essen-
tial. In a different experiment, we just used five runs
over the whole interval and the ”best of best” model
at the conclusion. The results showed that our sug-
gested approach was more efficient than the previous
one, with average errors of 1.86%, 1.72%, and 1.99%,
respectively, greater than in the previous test.
Further experiments suggested that narrowing the
search range was effective. Limiting the location
search to [0 - 0.99] produced the best results (average
error of 0.76%, location error of 0.72%, and depth er-
ror of 0.81%), though this approach didn’t align with
the objective of searching the entire beam length and
it is more informative.
To optimize the algorithm’s efficiency, we reduced
the number of PSO runs: from 2 to 1 for entire inter-
vals, from 5 to 3 for narrowed intervals, and condi-
tionally adjusted runs within [0 - 0.1]. Additionally,
we reduced the depth search range to 15% and 30%
of the beam’s height (rows 9 and 10), with the 30%
depth experiment showing the most promise.
These adjustments indicate that while narrowing
the search intervals improves precision, maintaining
some broader searches ensures robustness. The evolv-
ing approach demonstrates the potential for enhanc-
Multiple Crack Detection in Beam-Like Structures Using a Novel Particle Swarm Optimization Approach
339
ing the model’s efficiency and accuracy, with ongo-
ing refinements needed for practical Structural Health
Monitoring applications.
4 PERFORMANCE OVERVIEW
The errors dependent on the search intervals are pre-
sented in Table 2 (row 10). For location [0 - 1] and for
depth [0 - 0.6], the results are very satisfactory. An
average location error of 0.89% on a 1000mm long
beam translates to 0.89cm (or 8.9mm). For depth,
covering the first 60mm of a 200mm deep beam, an
average error of 1.23% translates to 0.738mm. This
means our algorithm achieves an error for location un-
der 1cm and an error for depth under 1mm.
Expanding on experiment 10 from Table 2, which
was conducted on 300 uniform targets, Table 3 shows
the percentage of locations and depths found under
different errors. It should be noted that the errors for
location and depth are calculated differently.
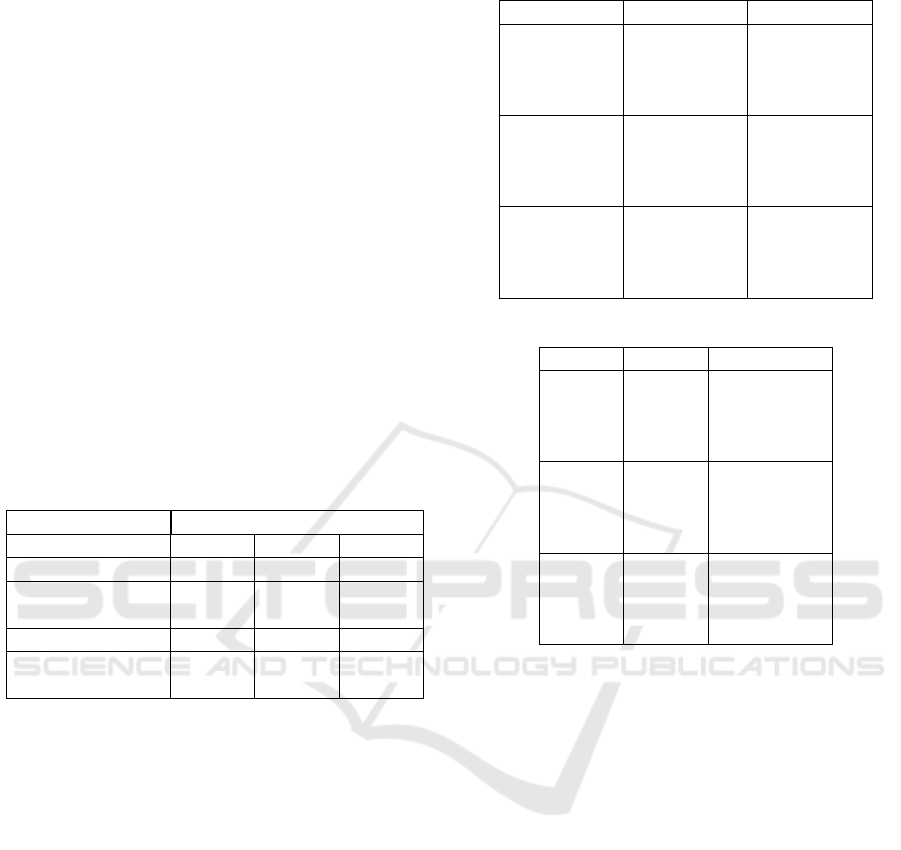
Table 3: Percentage of found with different errors.
Type Error
< 1% < 2% < 2%
Locations 96.16% 97.5% 97.66%
At least 1 out of 2
locations
100% 100% 100%
Depths 89.5% 91% 93.33%
At least 1 out of 2
depths
96% 96.33% 97.66%
Table 6 highlights 15 random samples from the
300 targets, showing that our model performs poorest
when the cracks are at the clamped end and has higher
accuracy for locations than depths.
Our results are comparable to related work. For
instance, the study (Sahu et al., 2018) used a CSAGA
model (a combination of clonal selection algorithm
and genetic algorithm). As shown in Table 4, our
model surpassed CSAGA in prediction accuracy.
Our model also matches the ANN model devel-
oped by the authors in (Maurya et al., 2018). Table 5
demonstrates that both models made nearly identical
predictions, with error rates close to 0%.
While it is challenging to compare our model’s
performance directly with related work due to vari-
ations in beam properties and benchmarks, we can
confidently state that our PSO model maintains a high
standard, with an overall error close to 1%.
Table 4: CSAGA model vs our model.
Target CSAGA Our Model
[0.125,
0.1375,
0.4375,
0.1625]
[0.12228,
0.1344,
0.4273,
0.159]
[0.12493315,
0.13697042,
0.43517278,
0.1685001 ]
[0.15625,
0.225,
0.53125,
0.2625]
[0.15276,
0.2173,
0.5196,
0.25633]
[0.15625005,
0.22500022,
0.53125016,
0.26249971]
[0.21875,
0.1875,
0.46875,
0.225]
[0.21347,
0.18335,
0.4569,
0.2198]
[0.21874927,
0.18749748,
0.46875855,
0.22498143]
Table 5: ANN model vs Our model.
Target ANN Our Model
[0.006,
0.166,
0.4,
0.4]
[0.006,
0.166,
0.4,
0.4]
[0.006,
0.16599,
0.39997,
0.40001]
[0.166,
0.333,
0.4,
0.4]
[0.165,
0.332,
0.417,
0.417]
[0.166,
0.333,
0.40001,
0.39999]
[0.333,
0.5,
0.4,
0.4]
[0.333,
0.5,
0.4,
0.4]]
[0.33296,
0.4995,
0.39995,
0.4003 ]
5 CONCLUSIONS
We investigated several parameters for PSO when ap-
plying this method for predicting the locations and
severities of 2 cracks in prismatic beams based on the
RFSs and PSO. From the tests performed, we identi-
fied good parameters by hyper-parameter tuning and
obtained excellent estimations, both for the 2 crack
positions and their respective depths using our own
developed ”Best of Best” approach. The average error
of less than 1% and less than 1.25% for the severity
means that our proposed method can be successfully
applied to the stated problem.
Two problems would arise with our methodology.
First off, if the cracks are closer than 5 mm, the su-
perposition principle will not hold. Secondly, our al-
gorithm might not scale properly. Although the su-
perposition can be used for any number of cracks, ex-
tending the approach to accommodate more cracks in
subsequent work may provide difficulties. In partic-
ular, challenges could surface during the first stage
when each location’s optimal narrowed interval is be-
ing searched for.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
340
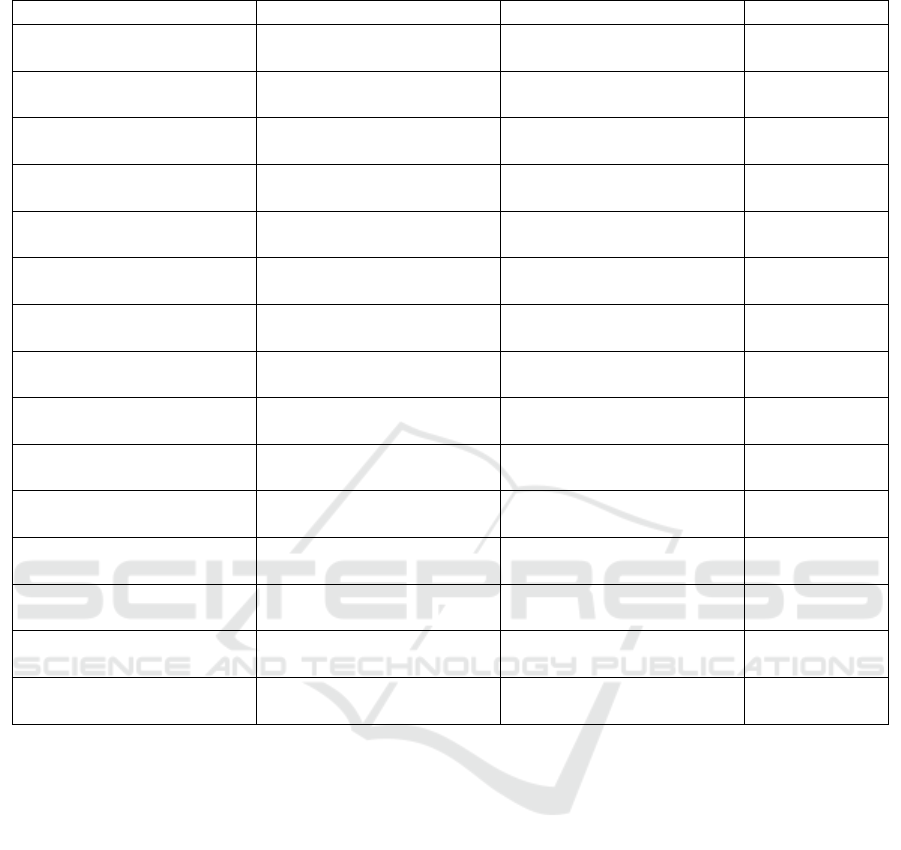
Table 6: Example of predictions.
Target Predicted Error % Mean Error %
[0.4598, 0.7152, 0.5841,
0.4266]
[0.4598, 0.7152, 0.5841,
0.4265]
[0, 0, 0.0028, 0.0042] 0.0018
[0.6893, 0.1113, 0.5933,
0.1565]
[0.6893, 0.1118, 0.5928,
0.1573]
[0.0018, 0.0474, 0.0794,
0.1409]
0.0674
[0.1803, 0.2550, 0.4382,
0.0676]
[0.1803, 0.2553, 0.4382,
0.0676]
[0.0003, 0.0375, 0.0016,
0.0075]
0.0117
[0.1078, 0.8705, 0.0022,
0.1403]
[0.0926, 0.8705, 0.0487,
0.1402]
[1.5236, 0.0024, 7.7486,
0.0198]
2.3236
[0.7733, 0.8200, 0.3782,
0.0261]
[0.7732, 0.8398, 0.3776,
0.0421]
[0.0122, 1.9783, 0.0946,
2.6562]
1.1853
[0.5701, 0.2046, 0.1945,
0.4737]
[0.2046, 0.5701, 0.4737,
0.1945]
[0, 0, 0, 0] 0
[0.2875, 0.7504, 0.0967,
0.4868]
[0.2875, 0.7504, 0.0967,
0.4868]
[0, 0, 0, 0] 0
[0.1468, 0.2139, 0.4900,
0.5009]
[0.1468, 0.2139, 0.4900,
0.5009]
[0, 0, 0, 0] 0
[0.1280, 0.6299, 0.4566,
0.4638]
[0.1280, 0.6299, 0.4566,
0.4638]
[0, 0, 0, 0] 0
[0.9556, 0.8967, 0.5819,
0.5564]
[0.9207, 0.8910, 0.4809,
0.4474]
[3.4891, 0.5681, 16.8419,
18.1578]
9.7642
[0.3273, 0.4975, 0.0075,
0.1942]
[0.3273, 0.4975, 0.0429,
0.1942]
[0.0005, 0.0004, 5.9108,
0.0001]
1.4780
[0.0028, 0.4900, 0.1298,
0.2172]
[0.0030, 0.4905, 0.1303,
0.2167]
[0.0159, 0.0515, 0.0800,
0.0851]
0.0581
[0.9128, 0.6575, 0.4073,
0.2701]
[0.9128, 0.6575, 0.4073,
0.2701]
[0, 0, 0, 0] 0
[0.8813, 0.8050, 0.2279,
0.5397]
[0.8813, 0.8050, 0.2279,
0.5397]
[0, 0, 0, 0] 0
[0.0623, 0.5662, 0.4172,
0.5537]
[0.0623, 0.5662, 0.4172,
0.5537]
[0, 0, 0, 0] 0
For future research, we will also focus on com-
paring the proposed PSO approach with other Neural
Network based techniques.
REFERENCES
Pyswarms’s documentation. https://pyswarms.readthedocs.
io/en/latest/. Accessed: 2024-05-19.
Gillich, G.-R., Aman, A. T., Abdel Wahab, M., and Tu-
fisi, C. (2019). Detection of multiple cracks using
an energy method applied to the concept of equiva-
lent healthy beam. In Proceedings of the 13th Inter-
national Conference on Damage Assessment of Struc-
tures: DAMAS 2019, 9-10 July 2019, Porto, Portugal,
pages 63–78. Springer.
Gillich, G.-R., Maia, N. M., Wahab, M. A., Tufisi, C., Ko-
rka, Z.-I., Gillich, N., and Pop, M. V. (2021). Damage
detection on a beam with multiple cracks: a simplified
method based on relative frequency shifts. Sensors,
21(15):5215.
Gillich, G.-R. and Praisach, Z.-I. (2014). Modal identifi-
cation and damage detection in beam-like structures
using the power spectrum and time–frequency analy-
sis. Signal Processing, 96:29–44.
Greco, A., Pluchino, A., Cannizzaro, F., Caddemi, S., and
Cali
`
o, I. (2018). Closed-form solution based genetic
algorithm software: application to multiple cracks de-
tection on beam structures by static tests. Applied Soft
Computing, 64:35–48.
Khaji, N. and Mehrjoo, M. (2014). Crack detection in a
beam with an arbitrary number of transverse cracks
using genetic algorithms. Journal of Mechanical Sci-
ence and Technology, 28:823–836.
Khatir, S., Belaidi, I., Khatir, T., Hamrani, A., Zhou, Y.-L.,
and Wahab, M. A. (2017). Multiple damage detection
in composite beams using particle swarm optimization
and genetic algorithm. Mechanics, 23(4):514–521.
Maurya, M., Mishra, R., and Panigrahi, I. (2018). Multi
crack detection in structures using artificial neural net-
work. In IOP Conference Series: Materials Science
and Engineering, volume 402, page 012142. IOP Pub-
lishing.
Multiple Crack Detection in Beam-Like Structures Using a Novel Particle Swarm Optimization Approach
341

Mohan, S., Maiti, D. K., and Maity, D. (2013). Struc-
tural damage assessment using frf employing particle
swarm optimization. Applied Mathematics and Com-
putation, 219(20):10387–10400.
Moradi, S. and Kargozarfard, M. H. (2013). On multiple
crack detection in beam structures. Journal of me-
chanical science and technology, 27:47–55.
Pop, M.-V., Tufisi, C., and Gillich, G.-R. (2022). Determin-
ing the position of two cracks in a cantilever beam us-
ing artificial neural networks. Vibroengineering Pro-
cedia, 46:14–20.
Praisach, Z. I., Gillich, G. R., Protocsil, C., and Muntean, F.
(2013). Evaluation of crack depth in beams for known
damage location based on vibration modes analysis.
Applied Mechanics and Materials, 430:90–94.
Sahu, S., Kumar, P. B., and Parhi, D. R. (2018). A hy-
bridised csaga method for damage detection in struc-
tural elements. Mechanics & Industry, 19(4):407.
Zheng, S., Liang, X., Wang, H., and Fan, D. (2014).
Detecting multiple cracks in beams using hierarchi-
cal genetic algorithms. Journal of Vibroengineering,
16(1):341–350.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
342
