
Coupled Lateral and Longitudinal Control for Vehicle Platoons on
Curved Roads
Bocheng Ma, Yang Zhu
∗
and Hongye Su
College of Control Science and Engineering, Zhejiang University, Hangzhou, Zhejiang, China
Keywords:
Vehicle Platoon, Longitudinal and Lateral Coupling, Frenet Coordinate System, Distributed Model Predictive
Control.
Abstract:
This paper presents a longitudinal and lateral coupling control model for platoons on roads with varying
curvature. The model integrates a 3-DOF vehicle dynamic model with lateral distance errors using the Frenet
coordinate system and employs a distributed predictive controller. This approach ensures that vehicles within
the platoon maintain ideal inter-vehicle distances, follow the leader’s speed, and remain within their lanes,
effectively addressing the “cutting-corner” issue. Joint simulations using Carsim and Matlab demonstrate that
the model effectively maintains ideal inter-vehicle distances and tracks the leader’s speed, even with changes
in the leader’s velocity.
1 INTRODUCTION
As transportation technology advances, the grow-
ing demand for travel has led to numerous is-
sues, including increased traffic accidents, severe
congestion, and worsening environmental pollution.
Within autonomous driving technology, platoon con-
trol—enhanced by developments in V2X communi-
cation—has gained significant research interest due to
its advantages in improving safety(Dai et al., 2022),
alleviating congestion(Zeng et al., 2023), and boost-
ing traffic efficiency(Ma et al., 2021).
The PATH project has made groundbreaking con-
tributions to platoon control, addressing numerous as-
sociated challenges (Rajamani et al., 2000). A frame-
work for platoon modeling introduced by (Li et al.,
2017; Basiri et al., 2020) includes four key com-
ponents: Node Dynamics, Information Flow Net-
work, Distributed Controller, and Formation Geom-
etry, which has advanced the field further. Distributed
Model Predictive Control (DMPC) is widely widely
applied in multi-agent cooperative control(He et al.,
2024), especially in platoon control(Negenborn and
Maestre, 2014; Zheng et al., 2017) for its ability to
reduce computational load and communication delays
in large-scale platoons while managing complex con-
straints effectively.
Most existing platoon control systems have con-
centrated on straight roads, focusing primarily on lon-
gitudinal control (Kwon and Chwa, 2014; Dunbar
∗
Corresponding author.
and Caveney, 2012), and have often overlooked lat-
eral dynamics. Given the practical challenges of pla-
toon operation on curved roads, addressing control in
such conditions is of considerable importance. The
cutting-corner problem on curved roads remains a sig-
nificant challenge (Zhao et al., 2022). The approach
proposed by (Bayuwindra et al., 2020), which utilizes
an extended look-ahead strategy, addresses this issue
without requiring road information, relying instead on
vehicle data. However, incorporating road informa-
tion into controllers can enhance performance in more
complex scenarios. Many control strategies simplify
design by separating lateral and longitudinal control
(Wu et al., 2022; Kianfar et al., 2014). The lateral and
longitudinal coupled platoon control model offers im-
proved precision and following performance, making
it a valuable and challenging area for research. The
Frenet coordinate system is frequently employed in
controllers that integrate road information, as it sim-
plifies path tracking and effectively manages curved
road data (Zuo et al., 2024).
This paper presents a lateral and longitudinal cou-
pled platoon control model, integrating the 3-D0F dy-
namic vehicle model with lateral distance errors in the
Frenet coordinate system (Wei et al., 2019). This in-
tegration facilitates optimal performance for platoons
on curved roads.
286
Ma, B., Zhu, Y. and Su, H.
Coupled Lateral and Longitudinal Control for Vehicle Platoons on Curved Roads.
DOI: 10.5220/0013131500003941
In Proceedings of the 11th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2025), pages 286-293
ISBN: 978-989-758-745-0; ISSN: 2184-495X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
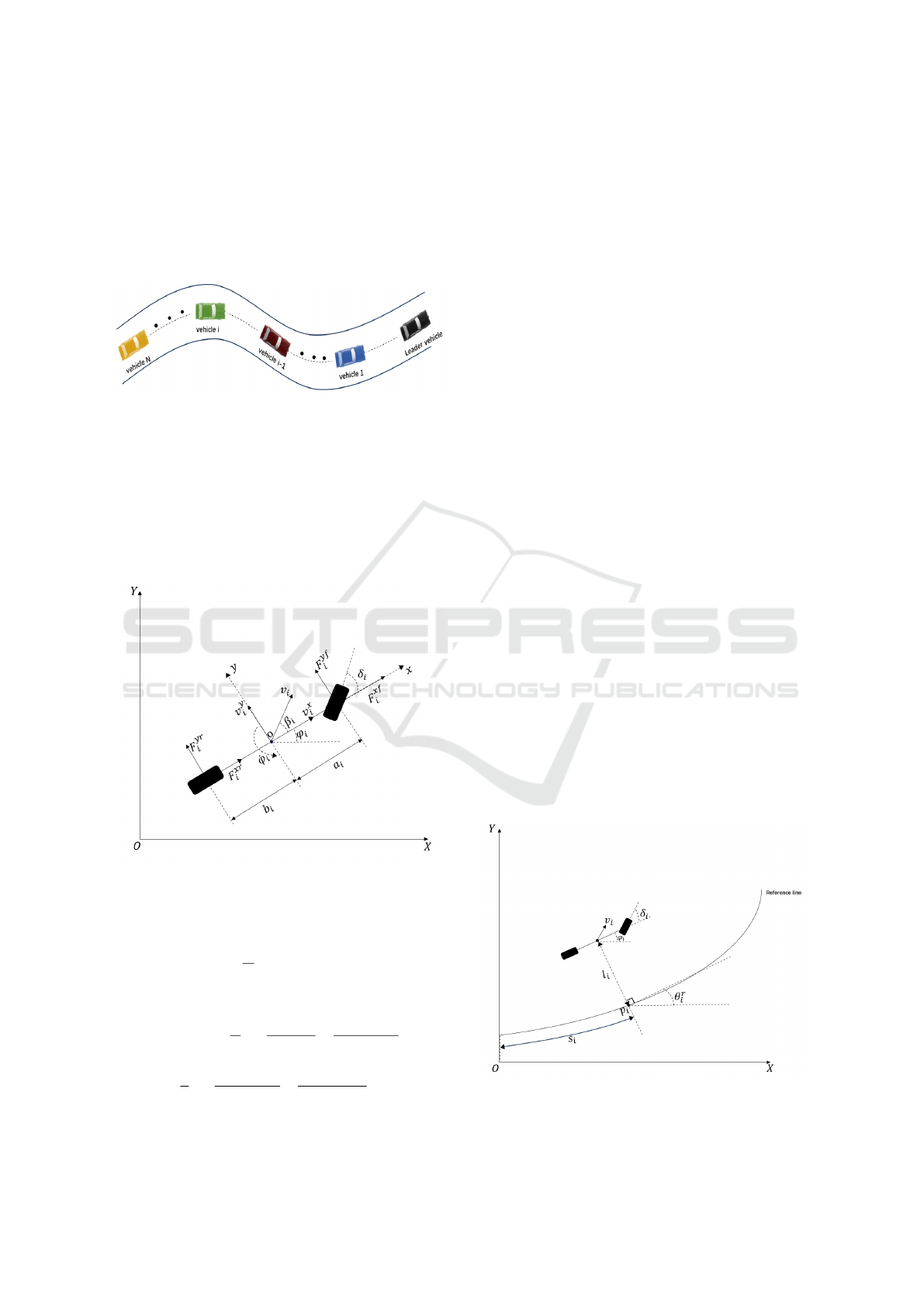
2 VEHICLE PLATOON MODEL
In this paper, as shown in Figure 1, a platoon of vehi-
cles on the curved road is presented, which consists of
a leader vehicle and several following vehicles. The
leader vehicle is denoted as 0, and the following vehi-
cles are denoted as 1 to N, respectively.
Figure 1: Vehicle platoon on the curved road.
2.1 Vehicles Dynamics Model
Since the vehicle platoon in this paper needs to travel
on roads with varying curvature, both lateral and lon-
gitudinal motion control is required. Therefore, as
shown in Figure 2, we introduce a 3-DOF dynamic
bicycle model of the vehicle
Figure 2: 3-DOF dynamic bicycle model of the vehicle.
In Figure 2, X , O, and Y represent the Earth coor-
dinate system, while x, o, and y represent the vehicle
body coordinate system. Based on (Feng et al., 2024),
set u
a
i
= ˙v
x
i
= v
y
i
˙
ϕ
i
+
1
m
i
F
x
i
, we propose a new vehicles
dynamics model which can be expressed as:
˙v
x
i
= u
a
i
˙v
y
i
= −v
x
i
˙
ϕ
i
+
1
m
i
−
(
C
f
i
+C
r
i
)
v
y
i
v
x
i
−
(
C
f
i
a
i
−C
r
i
b
i
)
˙
ϕ
i
v
x
i
+C
f
i
δ
i
¨
ϕ
i
=
1
I
z
i
−
(
C
f
i
a
i
−C
r
i
b
i
)
v
y
i
v
x
i
−
(
C
f
i
a
2
i
+C
r
i
b
2
i
)
˙
ϕ
i
v
x
i
+C
f
i
a
i
δ
i
(1)
The subscript i denotes the i-th vehicle, where i ∈
{1,2,..., N}. The mass of the i-th vehicle is denoted
by m
i
. The longitudinal and lateral velocities of the
i-th vehicle are represented by v
x
i
and v
y
i
, respectively.
The longitudinal forces on the front and rear tires are
denoted by F
xf
i
and F
xr
i
, respectively, while the lateral
forces on these tires are denoted by F
yf
i
and F
yr
i
. The
moment of inertia of the i-th vehicle about the z-axis
is represented by I
z
i
. The distances from the front and
rear axles to the center of mass of the i-th vehicle are
denoted by a
i
and b
i
, respectively. The yaw rate of the
i-th vehicle is given by
˙
ϕ
i
.
C
f
i
and C
r
i
represent the cornering stiffness of the
front and rear wheels of the vehicle i, respectively.
δ
i
is the steering angle of the front tires of the i-th
vehicle. u
a
i
denotes the acceleration of the i-th vehicle.
2.2 Longitudinal and Lateral Error
Model
Assuming the speed v
0
and position s
0
of the leading
vehicle are a priori known, the goal of the following
vehicles is to track the speed of the leading vehicle
while maintaining a desired inter-vehicle distance. In
this paper, the commonly used constant distance pol-
icy is adopted.
For each following vehicle i, i ∈ {1, 2,... ,N}, let
its position be defined as s
i
. The position error is de-
scribed as:
e
p
i
= s
0
− s
i
− i · d
des
(2)
where d
des
represents the desired inter-vehicle dis-
tance, which is a constant.
As shown in Figure 3, the lateral error l
i
is defined
in the Frenet coordinate system as the distance be-
tween the vehicle’s center of mass and its projection
onto the reference line.
Figure 3: Lateral error in the Frenet coordinate system.
Coupled Lateral and Longitudinal Control for Vehicle Platoons on Curved Roads
287

Here, p
i
is the projection of the center of mass of
vehicle i onto the reference line; v
i
is the velocity of
the center of mass of vehicle i; ϕ
i
is the yaw angle of
vehicle i; and θ
r
i
is the angle between the tangent to
the reference line at p
i
and the X-axis. The derivative
of l
i
with respect to time t is as follows:
˙
l
i
= v
y
i
cos(ϕ
i
− θ
r
i
) + v
x
i
sin(ϕ
i
− θ
r
i
) (3)
2.3 Longitudinal and Lateral Coupled
Model
By combining equations (1), (2), and (3), we obtain
the longitudinal and lateral coupling model for vehi-
cle i:
˙v
x
i
= u
a
i
˙v
y
i
= −v
x
i
˙
ϕ
i
+
1
m
i
−
(
C
f
i
+C
r
i
)
v
y
i
v
x
i
−
(
C
f
i
a
i
−C
r
i
b
i
)
˙
ϕ
i
v
x
i
+C
f
i
δ
i
¨
ϕ
i
=
1
I
z
i
−
(
C
f
i
a
i
−C
r
i
b
i
)
v
x
i
−
(
C
f
i
a
2
i
+C
r
i
b
2
i
)
˙
ϕ
i
v
x
i
+C
f
i
a
i
δ
i
˙
ϕ
i
=
˙
ϕ
i
˙e
p
i
= v
0
− v
i
˙
l
i
= v
y
i
cos(ϕ
i
− θ
r
i
) + v
x
i
sin(ϕ
i
− θ
r
i
)
(4)
Discretize the system and define the state variables
as follows:
X
i
(k) = [v
x
i
(k) v
y
i
(k)
˙
ϕ
i
(k) ϕ
i
(k) e
p
i
(k) l
i
(k)]
T
(5)
The control inputs are the acceleration and the
front wheel steering angle, defined as:
U
i
(k) = [u
a
i
(k) δ
i
(k)]
T
(6)
The output is given by:
y
i
(k) = [v
x
i
(k) e
p
i
(k)]
T
(7)
Using the Euler forward difference method, the
discrete nonlinear model is given by:
(
X
i
(k + 1) = φ
i
X
i
(k),U
i
(k)
y
i
(k) = γX
i
(k)
(8)
γ =
1 0 0 0 0 0
0 0 0 0 1 0
where γ is the matrix defined above. The function
φ
i
X
i
(k),U
i
(k)
is specified in equation (11), and T
s
represents the discrete time interval.
3 DISTRIBUTED MODEL
PREDICTIVE CONTROL
This section introduces the design of a Distributed
Model Predictive Control (DMPC). Vehicles ex-
change and receive information based on the com-
munication topology. Each vehicle transmits its own
state and the received information to its upper-level
DMPC controller, which then optimizes to compute
the optimal control inputs. The DMPC controller ad-
justs the state of each vehicle to ensure coordinated
behavior of the platoon.
3.1 Communication Topology
The design of the communication topology plays a
crucial role in the formulation of the cost function
in DMPC. The communication topology of the ve-
hicle fleet can be represented by a directed graph
G = {V,E} , where V = {0,1,2, . .., N} is the set of
vehicles, and E ⊆ V × V is the set of edges that con-
nect vehicles, and then define an N-order real-valued
adjacency matrix A = [a
i j
] ∈ R
N×N
, which is used
to represent the communication relationship between
any two vehicles
A = [a
i j
] =
(
a
i j
= 1, if
{
j, i
}
∈ E
a
i j
= 0, if
{
j, i
}
/∈ E
(10)
where i, j ∈ V and { j,i} ∈ E indicate a directed edge
from j to i, meaning that information from vehicle j
can be transmitted to vehicle i. We define N
i
= { j |
a
i j
= 1, j ∈ {1,2, . .., N}} as the neighbor set of ve-
hicle i, which implies that vehicle i can receive infor-
mation from any vehicle j ∈ N
i
. Similarly, we define
O
i
= { j | a
ji
= 1, j ∈ {1,2, ..., N}}, representing the
set of vehicles to which vehicle i can transmit infor-
mation. In this paper, we adopt the commonly used
predecessor-leader following (PLF) topology, as illus-
trated in Figure 4.
Figure 4: Predecessor-leader following (PLF) topology.
3.2 Controller Design
DMPC transforms the global problem into a local
problem for each vehicle, where all vehicles simul-
taneously solve their own optimization problems.
Assume that the lead vehicle is not controlled and
always follows the ideal trajectory. Then, accord-
ing to equation (7), we define the reference values
X
i,des
(k) for the follower vehicles in the platoon:
X
i,des
(k) =
[v
x
i,des
(k) v
y
i,des
(k)
˙
ϕ
i,des
(k) ϕ
i,des
(k) e
p
i,des
(k) l
i,des
(k)]
T
(11)
where v
x
i,des
(k) is the desired speed of vehicle i.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
288

φ
i
X
i
(k),U
i
(k)
=
u
a
i
(k)T
s
+ v
x
i
(k)
−v
x
i
(k)
˙
ϕ
i
(k) +
1
m
i
−
(C
f
i
+C
r
i
)v
y
i
(k)
v
x
i
(k)
−
(C
f
i
a
i
−C
r
i
b
i
)
˙
ϕ
i
(k)
v
x
i
(k)
+C
f
i
δ
i
(k)
!!
T
s
+ v
y
i
(k)
1
I
z
i
−
(C
f
i
a
i
−C
r
i
b
i
)v
y
i
(k)
v
x
i
(k)
−
(C
f
i
a
2
i
+C
r
i
b
2
i
)
˙
ϕ
i
(k)
v
x
i
(k)
+C
f
i
a
i
δ
i
(k)
!!
T
s
+
˙
ϕ
i
(k)
˙
ϕ
i
(k)T
s
+ ϕ
i
(k)
(v
0
(k) − v
i
(k)) T
s
+ e
p
i
(k)
v
y
i
(k) cos
ϕ
i
(k) − θ
r
i
(k)
+ v
x
i
(k) sin
ϕ
i
(k) − θ
r
i
(k)
T
s
+ l
i
(k)
(9)
In the platoon, the desired speed of the follower
vehicles should track the speed of the lead vehicle,
thus let v
x
i,des
(k) = v
0
(k). The desired lateral speed
v
y
i,des
(k) = 0, but this does not mean that we expect
the lateral speed to be exactly zero, as it is impossible
for the vehicle’s lateral speed to be zero when driving
through a curve. We simply want the lateral speed to
be as small as possible to reduce vehicle oscillation.
Assuming that the onboard equipment can mea-
sure the road radius R, meaning the road radius is
known, then the ideal yaw rate is:
˙
ϕ
i,des
(k) =
v
x
i
(k)
R
. (12)
The ideal yaw angle, as shown in Figure 3, is
the angle between the tangent to the reference line at
point p
i
and the X-axis, i.e.,
ϕ
i,des
(k) = θ
r
i
(k). (13)
The ideal spacing error e
p
i,des
(k) = 0 and the ideal
lateral distance error l
i,des
(k) = 0, as we want to main-
tain a safe set distance between vehicles and ensure
that each following vehicle travels along the reference
line.
In the local problem for each following vehicle,
define the same prediction horizon N
p
. In the pre-
diction horizon [k, k + N
p
], three state trajectories are
defined.
1) X
p
i
(t|k) : Predicted state trajectory.
2)
˜
X
i
(t|k) : Assumed state trajectory.
3) X
∗
i
(t|k) : Optimal state trajectory.
Here, t = 0,1, . .., N
p
. Similarly, define three con-
trol input trajectories.
1) U
p
i
(t|k) : Predicted control input trajectory.
2)
˜
U
i
(t|k) : Assumed control input trajectory.
3) U
∗
i
(t|k) : Optimal control input trajectory.
Within the prediction horizon, define the reference
state trajectory
X
i,des
(t|k) =
[v
x
i,des
(t|k) v
y
i,des
(t|k)
˙
ϕ
i,des
(t|k) ϕ
i,des
(t|k)
e
p
i,des
(t|k) l
i,des
(t|k)]
T
(14)
v
x
i,des
(t|k) = v
0
(k)
v
y
i,des
(t|k) = 0
˙
ϕ
i,des
(t|k) =
˜v
x
i
(t|k)
R
ϕ
i,des
(t|k) = θ
r
i
(t|k)
e
p
i,des
(t|k) = 0
l
i,des
(t|k) = 0
t = 0,1, ...,N
p
(15)
where ˜v
x
i
(t|k) is the first term in the assumed state tra-
jectory, and θ
r
i
(t|k) can be computed from the refer-
ence line information collected by the onboard equip-
ment.
Now, we present the local optimization control
problem for each vehicle i .
Problem P : For each vehicle i, i ∈ 1, 2, ... , N, at
time k
min
U
p
i
(:|k)
N
p
−1
∑
t=0
J
i
X
p
i
(t|k),y
p
i
(t|k), ˜y
i
(t|k), ˜y
j
(t|k),U
p
i
(t|k)
+
X
p
i
(N
p
|k) − X
i,des
(N
p
|k)
Q
i
(16a)
subject to
X
p
i
(t + 1|k) = φ
i
X
p
i
(t|k),U
p
i
(t|k)
y
p
i
(t|k) = γX
p
i
(t|k)
X
p
i
(0|k) = X
i
(k)
(16b)
u
a
i,min
≤ u
a,p
i
(t|k) ≤ u
a
i,max
(16c)
δ
i,min
≤ δ
p
i
(t|k) ≤ δ
i,max
(16d)
Coupled Lateral and Longitudinal Control for Vehicle Platoons on Curved Roads
289

where
J
i
X
p
i
(t|k),y
p
i
(t|k), ˜y
i
(t|k), ˜y
j
(t|k),U
p
i
(t|k)
=
X
p
i
(t|k) − X
i,des
(t|k)
Q
i
+
y
p
i
(t|k) − ˜y
j
(t|k)
F
i
+
∑
j∈N
i
y
p
i
(t|k) − ˜y
j
(t|k)
M
i
+
U
p
i
(t|k)
R
i
(17)
where U
p
i
(: |k) = [U
p
i
(0|k),... ,U
p
i
(N
p
− 1|k)] repre-
sents the unknown control input trajectory to be op-
timized, Q
i
∈ S
2
, F
i
∈ S
2
, M
i
∈ S
2
, R
i
∈ S
2
are the
weighting matrices and they are all symmetric pos-
itive definite matrices.
∥
o
∥
Q
i
represents
∥
o
∥
Q
i
=
o
T
Q
i
o. ˜y
i
(t|k) = γ
˜
X
i
(t|k) is the assumed output of the
vehicle i, and ˜y
j
(t|k) = γ
˜
X
j
(t|k) is the assumed output
of the neighboring vehicle j of the vehicle i. (16c)
and (16d) represent constraints on the control inputs
of acceleration and front wheel steering angle, ensur-
ing that the vehicle’s acceleration, deceleration, and
front wheel steering angles remain within the physi-
cally feasible limits.
In the cost function (17)
1)
X
p
i
(t|k) − X
i,des
(t|k)
Q
i
represents the penalty
for the error between the predicted state trajectory of
vehicle i and the desired state trajectory.
2)
y
p
i
(t|k) − ˜y
j
(t|k)
F
i
represents the penalty for
the error between the predicted output trajectory of
vehicle i and the assumed output trajectory.
3) ∥y
p
i
(t|k) − ˜y
j
(t|k)∥
M
i
represents the penalty for
the error between the predicted output trajectory of
vehicle i and the assumed output trajectory vehicle j.
4)
U
p
i
(t|k)
R
i
represents the penalty for the con-
trol inputs of acceleration and front wheel steering an-
gle for vehicle i .
Furthermore,
X
p
i
(N
p
|k) − X
i,des
(N
p
|k)
Q
i
is the
terminal cost function.
3.3 Algorithm of DMPC
The assumed control input trajectory
˜
U
i
(t|k) is iter-
ated using the following equation
˜
U
i
(t|k) =
(
U
∗
i
(t + 1|k − 1),t = 0, 1,...,N
p
− 2
U
∗
i
(N
p
− 1|k − 1),t = N
p
− 1
(18)
The assumed state trajectory
˜
X
i
(t|k) is then com-
puted based on the assumed control input trajectory
˜
X
i
(t + 1|k) = φ
i
˜
X
i
(t|k),
˜
U
i
(t|k)
˜
X
i
(0|k) = X
∗
i
(1|k − 1)
˜y
i
(t|k) = γ
˜
X
i
(t|k)
t = 0,1, ...,N
p
− 1
(19)
The DMPC algorithm is presented as Algorithm 1:
Algorithm 1: DMPC Algorithm.
1 Initialization:
/* At time k =0, initialize the
assumed state trajectory for
vehicle i = 1,2, ...,N. */
2 Initialize the state variables X
i
(0) and control
inputs U
i
(0) of vehicle i.
3
e
U
i
(t|0) = U
i
(0),t = 0,1,...,N
p
;
4 for t = 0 to N
p
− 1 do
5
˜
X
i
(t + 1|0) = φ
i
˜
X
i
(t|0),
˜
U
i
(t|0)
;
6 ˜y
i
(t|0) = γ
˜
X
i
(t|0);
7
˜
X
i
(0|0) = X
i
(0);
8 end
9 Iteration:
/* At time k>0, all vehicles
i = 1,2, ...,N perform iterative
computations. */
10 while the lead vehicle has not stopped do
11 1) Vehicle i gets the optimal control input
trajectory U
∗
i
(t|k) through solving the
problem P ;
12 2) Calculate the optimal state trajectory.
13 for t = 0 to N
p
− 1 do
14 X
∗
i
(t + 1|k) = φ
i
(X
∗
i
(t|k),U
∗
i
(t|k));
15 X
∗
i
(0|k) = X
i
(k);
16 end
17 3) Calculate the assumed control and
output trajectories for the next time step
using equations (18) and (19);
18 4) Transmit ˜y
i
(t|k + 1) to vehicles j ∈ O
i
,
receive ˜y
j
(t|k + 1) from vehicles j ∈ Ni,
and obtain Xi,des(t|k + 1) from the lead
vehicle and onboard systems;
19 5) Apply the first element of the optimal
control input, U
i
(t) = U
∗
i
(0|k), to
vehicle i;
20 6) Set k = k + 1;
21 end
Algorithm 1 presents the detailed steps of the
DMPC algorithm. Within this framework, each ve-
hicle in the fleet simultaneously solves its own opti-
mization problem. This synchronized execution en-
sures the effectiveness of real-time control.
4 SIMULATION
The simulation will use CarSim 2016 and Matlab
2020b in conjunction. We validate the effectiveness
of the longitudinal and lateral coupling platoon con-
trol model.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
290
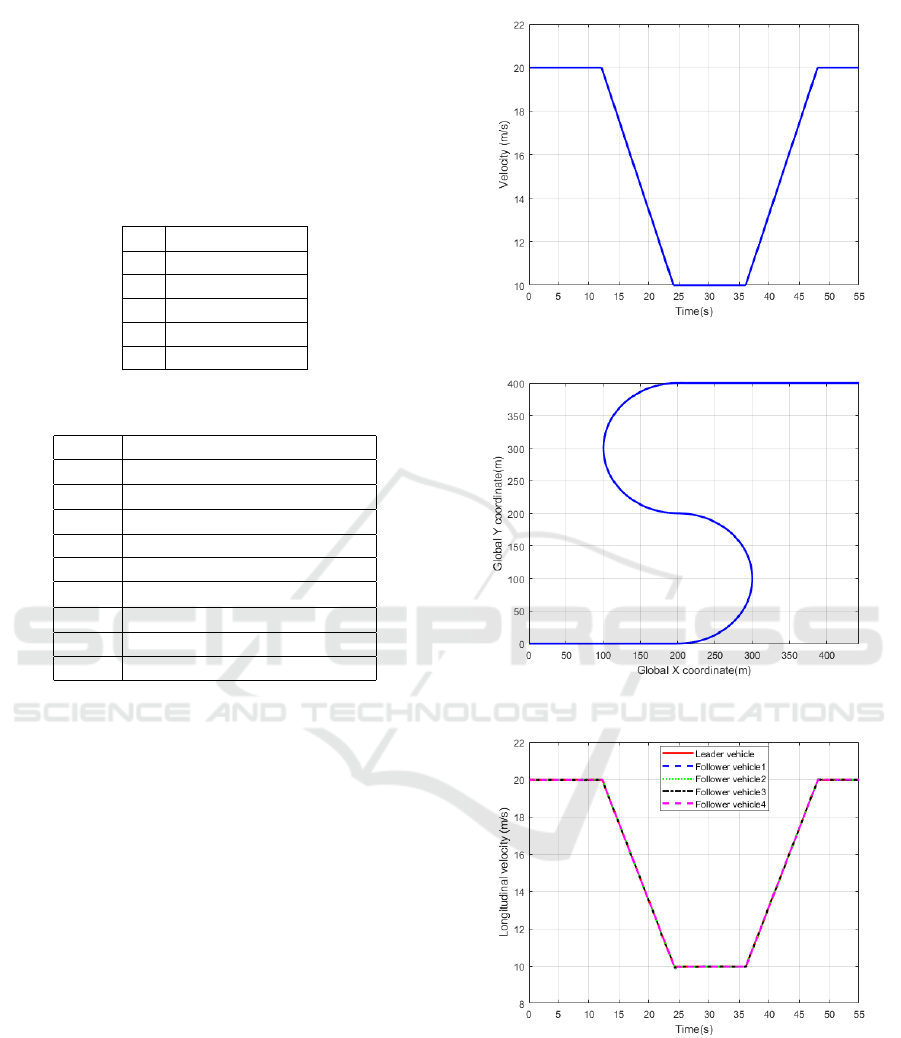
4.1 Parameter Settings
In this section, we will provide information about the
vehicle and relevant parameters in the control algo-
rithm. The vehicles in the simulation are homoge-
neous. The parameter settings can be found in Table
1 and Table 2.
Table 1: Vehicle parameters.
C
f
i
110000(N/rad)
C
r
i
110000(N/rad)
a
i
1.015(m)
b
i
1.950(m)
m
i
1412(kg)
I
z
i
1536.7(kg·m²)
Table 2: Control parameters.
N
p
6
Q
i
10
6
diag(5, 1, 5, 500, 10, 10)
F
i
10
6
diag(1, 100)
M
i
10
4
diag(1, 100)
R
i
diag(10, 10)
T
s
0.1(s)
u
a
i,min
-8(m/s²)
u
a
i,max
5(m/s²)
δ
i,min
-1(rad)
δ
i,max
1(rad)
4.2 Simulation Results
This case is used to verify the effectiveness of the lon-
gitudinal and lateral coupling platoon control model
proposed in this paper.
Set the initial position of the lead vehicle s
0
=
60m, the initial position of the following vehicle s
1
=
45m, s
2
= 30m, s
3
= 15m, s
4
= 0m. Set the desired
inter-vehicle distance as d
des
= 15m. The velocity tra-
jectory of the lead vehicle is shown in Figure 5. The
reference line is shown in Figure 6.
The simulation results are shown from Figures 7
to 10. Figure 7 presents the vehicle velocities. It
can be observed that the following vehicles in the pla-
toon closely track the lead vehicle’s speed during con-
stant, deceleration, and acceleration phases. Figure 8
shows the vehicle positions, demonstrating that safe
distances between vehicles are maintained throughout
the simulation, preventing collisions. Figure 9 illus-
trates the ideal inter-vehicle spacing errors. Under the
PLF topology, since the first following vehicle only
receives information from the lead vehicle, its reac-
tion is more intense when the lead vehicle changes
speed, resulting in relatively larger spacing errors. In
Figure 5: Lead vehicle’s desired velocity trajectory.
Figure 6: Reference line.
Figure 7: Velocity of vehicles.
contrast, the following vehicles can receive informa-
tion from both the lead vehicle and the preceding ve-
hicle, which leads to smaller spacing errors. Overall,
the spacing errors between vehicles remain within a
small range. Figure 10 illustrates the lateral distance
error of the vehicles. It shows that the lateral distance
error is minimal, indicating that the vehicles main-
Coupled Lateral and Longitudinal Control for Vehicle Platoons on Curved Roads
291
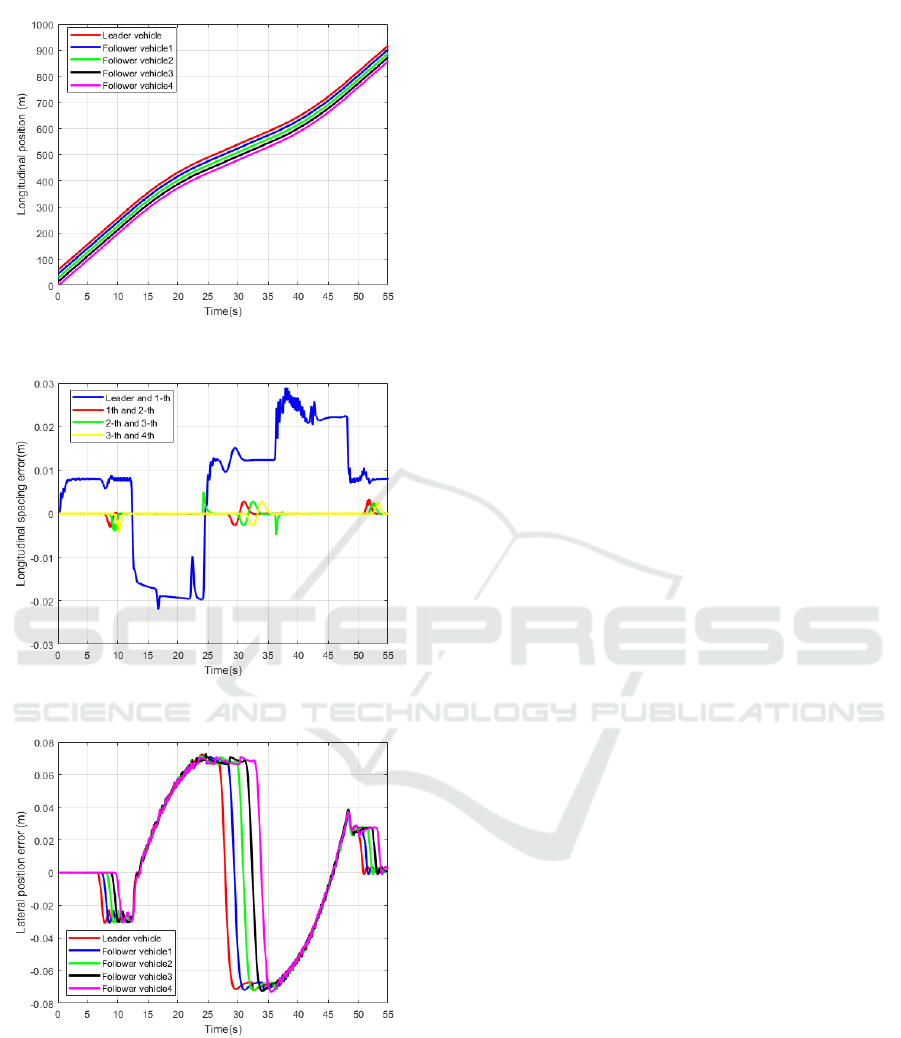
Figure 8: Longitudinal position of vehicles.
Figure 9: Longitudinal spacing error.
Figure 10: Lateral position error.
tain excellent lane-keeping performance while driving
on roads with varying curvature, avoiding the cutting-
corner problem and preventing drifting out of lane.
5 CONCLUSION
This paper focuses on platoon driving on curved
roads by integrating a 3-DOF dynamic vehicle model
with lateral distance in the Frenet coordinate sys-
tem, forming a new longitudinal and lateral cou-
pled platoon control model, which is controlled by
DMPC (Distributed Model Predictive Control). Sim-
ulations demonstrate the good performance of the
longitudinal-lateral coupled platoon control model. In
the future, we plan to extend our research to cooper-
ative control among more platoons, such as two or
three platoons, and explore better models to improve
control performance.
ACKNOWLEDGEMENTS
This work is supported by Zhejiang Provincial
Natural Science Foundation of China (Grant No.
LQ23F030014), National Natural Science Foundation
of China (Grant No. 62303410), and Open Research
Project of State Key Laboratory of Industrial Control
Technology, Zhejiang University, China (Grant No.
ICT2024B46).
REFERENCES
Basiri, M. H., Ghojogh, B., Azad, N. L., Fischmeister, S.,
Karray, F., and Crowley, M. (2020). Distributed non-
linear model predictive control and metric learning for
heterogeneous vehicle platooning with cut-in/cut-out
maneuvers. In 2020 59th IEEE Conference on Deci-
sion and Control (CDC), pages 2849–2856.
Bayuwindra, A., Ploeg, J., Lefeber, E., and Nijmeijer, H.
(2020). Combined longitudinal and lateral control of
car-like vehicle platooning with extended look-ahead.
IEEE Transactions on Control Systems Technology,
28(3):790–803.
Dai, Y., Yang, Y., Wang, Z., and Luo, Y. (2022). Exploring
the impact of damping on connected and autonomous
vehicle platoon safety with cacc. Physica A: Statisti-
cal Mechanics and its Applications, 607:128181.
Dunbar, W. B. and Caveney, D. S. (2012). Distributed re-
ceding horizon control of vehicle platoons: Stability
and string stability. IEEE Transactions on Automatic
Control, 57(3):620–633.
Feng, Y., Yu, S., Sheng, E., Li, Y., Shi, S., Yu, J., and
Chen, H. (2024). Distributed mpc of vehicle platoons
considering longitudinal and lateral coupling. IEEE
Transactions on Intelligent Transportation Systems,
25(3):2293–2310.
He, J., Zhao, F., Zhu, S., Li, S., and Xu, J. (2024). Priority-
based deadlock recovery for distributed swarm ob-
stacle avoidance in cluttered environments. In 2024
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
292

IEEE/RSJ International Conference on Intelligent
Robots and Systems (IROS), pages 14056–14062.
IEEE.
Kianfar, R., Ali, M., Falcone, P., and Fredriksson, J. (2014).
Combined longitudinal and lateral control design for
string stable vehicle platooning within a designated
lane. In 17th International IEEE Conference on In-
telligent Transportation Systems (ITSC), pages 1003–
1008.
Kwon, J.-W. and Chwa, D. (2014). Adaptive bidirectional
platoon control using a coupled sliding mode control
method. IEEE Transactions on Intelligent Transporta-
tion Systems, 15(5):2040–2048.
Li, S. E., Zheng, Y., Li, K., Wu, Y., Hedrick, J. K., Gao,
F., and Zhang, H. (2017). Dynamical modeling and
distributed control of connected and automated vehi-
cles: Challenges and opportunities. IEEE Intelligent
Transportation Systems Magazine, 9(3):46–58.
Ma, K., Wang, H., and Ruan, T. (2021). Analysis of road
capacity and pollutant emissions: Impacts of con-
nected and automated vehicle platoons on traffic flow.
Physica A: Statistical Mechanics and its Applications,
583:126301.
Negenborn, R. and Maestre, J. (2014). Distributed model
predictive control: An overview and roadmap of fu-
ture research opportunities. IEEE Control Systems
Magazine, 34(4):87–97.
Rajamani, R., Tan, H.-S., Law, B. K., and Zhang, W.-B.
(2000). Demonstration of integrated longitudinal and
lateral control for the operation of automated vehicles
in platoons. IEEE Transactions on Control Systems
Technology, 8(4):695–708.
Wei, S., Zou, Y., Zhang, X., Zhang, T., and Li, X. (2019).
An integrated longitudinal and lateral vehicle follow-
ing control system with radar and vehicle-to-vehicle
communication. IEEE Transactions on Vehicular
Technology, 68(2):1116–1127.
Wu, J., Wang, Y., and Yin, C. (2022). Curvilinear multi-
lane merging and platooning with bounded control in
curved road coordinates. IEEE Transactions on Vehic-
ular Technology, 71(2):1237–1252.
Zeng, J., Qian, Y., Li, J., Zhang, Y., and Xu, D. (2023).
Congestion and energy consumption of heterogeneous
traffic flow mixed with intelligent connected vehicles
and platoons. Physica A: Statistical Mechanics and its
Applications, 609:128331.
Zhao, H., Sun, D., Zhao, M., Pu, Q., and Tang, C. (2022).
Combined longitudinal and lateral control for hetero-
geneous nodes in mixed vehicle platoon under v2i
communication. IEEE Transactions on Intelligent
Transportation Systems, 23(7):6751–6765.
Zheng, Y., Li, S. E., Li, K., Borrelli, F., and Hedrick,
J. K. (2017). Distributed model predictive control for
heterogeneous vehicle platoons under unidirectional
topologies. IEEE Transactions on Control Systems
Technology, 25(3):899–910.
Zuo, Z., Yang, K., Wang, H., Wang, Y., and Wu, Y. (2024).
Distributed mpc for automated vehicle platoon: A
path-coupled extended look-ahead approach. IEEE
Transactions on Intelligent Vehicles, pages 1–13.
Coupled Lateral and Longitudinal Control for Vehicle Platoons on Curved Roads
293
