
Immersive versus Non-Immersive Virtual Reality Environments:
Comparing Different Visualization Modalities in a Cognitive-Motor
Dual-Task
Marianna Pizzo
a
, Matteo Martini
b
, Fabio Solari
c
and Manuela Chessa
d
Department of Informatics, Bioengineering, Robotics and Systems Engineering,
University of Genoa, Genoa, Italy
{marianna.pizzo, matteo.martini}@edu.unige.it, {fabio.solari, manuela.chessa}@unige.it
Keywords:
Perspective Visualization, Orthographic Visualization, Reaching Task, Counting Task, Presence in VR,
Usability in VR, Cognitive Load.
Abstract:
In fields like cognitive and physical rehabilitation, adopting immersive visualization devices can be unfeasible.
In these cases, the main challenge is to develop Virtual Reality (VR) scenarios that still provide a strong
sense of presence, usability, and user agency, even without full immersion. This paper explores a cognitive-
motor dual-task in VR, consisting in counting and reaching, comparing three non-immersive visualization
methods on a 2D screen (tracked perspective camera, fixed perspective camera, fixed orthographic camera)
with the immersive experience provided by a head-mounted display. The comparison focused on factors like
sense of presence, usability, cognitive load, and task accuracy. Results show, as expected, that immersive
VR provides a higher sense of presence and better usability with respect to the non-immersive visualization
methods. Unexpectedly, the implemented 2D visualization based on a tracked perspective camera seems not
to be the best approximation of immersive VR. Finally, the two fixed camera conditions showed no significant
differences in performance based on the type of projection.
1 INTRODUCTION
Immersive Virtual Reality (VR) technology has ex-
panded beyond gaming and entertainment into fields
such as education, training, medical simulation, and
rehabilitation. However, transitioning VR into clini-
cal practice remains challenging due to financial con-
straints, resistance to change, privacy concerns, and
gaps in staff training.
Clinicians have recently shown growing interest in
serious games and exergames for rehabilitation (Lee
et al., 2024; Ehioghae et al., 2024; Ren et al., 2024;
Garzotto et al., 2024). Nevertheless, immersive VR
is not always suitable for every rehabilitation proto-
col due to the unique needs of patients. For instance,
it may be unusable in cases of severe cognitive im-
pairment, epilepsy, or simply when clinicians opt for
non-immersive VR based on the patient’s condition.
Another limitation is the lack of sufficient data on the
a
https://orcid.org/0009-0004-8653-4018
b
https://orcid.org/0009-0006-3929-5055
c
https://orcid.org/0000-0002-8111-0409
d
https://orcid.org/0000-0003-3098-5894
use of head-mounted displays (HMDs) for rare condi-
tions, though this gap is gradually narrowing (Malihi
et al., 2020).
Exergames and serious games in clinical settings
are often delivered via non-immersive VR on 2D
screens, but the lack of depth cues reduces movement
precision, increases cognitive strain (Wenk et al.,
2022), and limits the immersive benefits of VR (Rao
et al., 2023). Moreover, the use of perspective cam-
eras in 3D virtual environments can distort object pro-
portions on 2D screens. To address this issue, clin-
icians often require to downgrade exergames to 2D
scenarios; although these are easier to manage, they
lose foundamental advantages of 3D environments,
such as depth perception, spatial representation, and
improved eye-hand coordination. A potential solution
to these issues is the adoption of orthographic camera
visualization for non-immersive VR.
In all these cases where immersive VR is not fea-
sible, developers of such systems who collaborate
with clinicians, must know which is the best non-
immersive alternative to it. For this reason, in this
paper, we aim to evaluate which non-immersive vi-
sualization modality can provide a user experience
Pizzo, M., Martini, M., Solari, F. and Chessa, M.
Immersive versus Non-Immersive Virtual Reality Environments: Comparing Different Visualization Modalities in a Cognitive-Motor Dual-Task.
DOI: 10.5220/0013133600003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 1: GRAPP, HUCAPP
and IVAPP, pages 561-568
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
561

that most closely resembles immersive VR. Specifi-
cally, we aim to understand if a non-immersive per-
spective visualization (onto a 2D screen), continu-
ously updated by considering the tracked user’s ac-
tual pose (in this paper referred to as point-of-view,
POV), could be a valid substitution for immersive VR.
Moreover, we aim to analyze the differences between
non-immersive fixed (i.e., without tracking the users’
head pose) perspective and orthographic visualization
(PERSP and ORTHO, respectively). The following
hypotheses are formulated:
• H1. The non-immersive tracked perspective visu-
alization (POV modality) is the best approxima-
tion of immersive VR, thus showing (a) a higher
sense of presence, (b) better usability, and (c) a
lower cognitive load compared to PERSP and OR-
THO modalities.
• H2. The non-immersive perspective (PERSP
modality) and orthographic visualization (OR-
THO modality) provide comparable (a) sense of
presence, (b) usability, and (c) cognitive load.
• H3. As a control hypothesis, the experimen-
tal setup confirms the finding of previous work
(Pallavicini et al., 2019; Boyd, 1997; Wenk et al.,
2022) that demonstrated the advantages of immer-
sive VR with respect to non-immersive visuali-
sation modalities, particularly in terms of (a) a
higher sense of presence, (b) better usability, and
(c) reduced cognitive load.
To compare the different visualization modalities,
we consider a cognitive-motor dual-task: subjects are
asked to count specific objects appearing in the virtual
scene (cognitive task) while reaching specific targets
(motor task). This approach is widely used in the lit-
erature to evaluate the cognitive load in different con-
ditions (Baumeister et al., 2017; Souchet et al., 2022).
2 RELATED WORK
Serious games and exergames are interactive
computer-based games designed for purposes beyond
entertainment, such as education, skill enhance-
ment, and behaviour change. Both are examples
of gamification, which applies game elements in
non-game contexts (Landers, 2014). Gamification is
widely used in fields like education, healthcare, and
wellness, often integrating VR to enhance immersion
and user experience through realistic, ecological 3D
environments (Carlier et al., 2020).
According to (Bassano et al., 2022), VR se-
tups can be classified into non-immersive, semi-
immersive, and immersive categories. Non-
immersive systems use screens that do not occlude the
user’s field of view (FOV), allowing a persistent sense
of the real world. Semi-immersive systems, such as
driving simulators based on multi-monitor configura-
tions or like the CAVEs, provide partial virtual en-
vironments and do not block external sensorial stim-
ulations, whereas immersive systems, e.g., the Meta
Quest 3
1
or HTC Vive
2
, fully immerse the user in the
virtual environment.
Despite the benefits of immersive VR in enhanc-
ing presence, most exergames and serious games still
rely on non-immersive setups due to their accessi-
bility, affordability, and portability (Bassano et al.,
2022). Even with advancements in affordable HMDs
with high performance, non-immersive VR remains
the most widely used visualization technology, fol-
lowed by immersive VR. Recent findings in (Sud
´
ar
and Csap
´
o, 2024) also show that cognitive load in 2D
tasks using standard UIs and non-immersive 3D envi-
ronments is comparable.
In their systematic review and meta-analysis, (Ren
et al., 2024) examined the impact of VR-based reha-
bilitation on patients with mild cognitive impairment
or dementia, highlighting the benefits of immersive
over non-immersive VR. Immersive VR showed sig-
nificant improvements in cognition and motor func-
tion compared to non-immersive setups, due to the
transfer of cognitive skills from the game to reality,
enhancing real-world performance.
In (Wenk et al., 2019), the impact of visualiza-
tion technologies on movement quality and cognitive
load was assessed by comparing (i) an immersive VR
HMD, (ii) an Augmented Reality (AR) HMD, (iii)
and a computer screen. Participants performed goal-
oriented reaching motions (measured with an HTC
Vive controller) while completing a concurrent count-
ing task to assess cognitive load. Compared to screen
displays, VR improved motor performance, which is
likely due to the more direct mapping between virtual
representation and physical movement. On the other
hand, there was not a noticeable impact of the display
mode on cognitive load.
The same authors repeated the experiment with
twenty elderly participants and five subacute brain-
injured patients (Wenk et al., 2022) to evaluate the ef-
fects of different visualization technologies on move-
ment quality and cognitive load. Results for 3D reach-
ing movements mirrored the first study, but HMDs
appeared to reduce cognitive load. Participants also
rated HMDs as highly usable, supporting their use in
future VR-based rehabilitation.
These findings were further confirmed in a sub-
1
https://www.meta.com/it/quest/quest-3
2
https://www.vive.com/eu/
HUCAPP 2025 - 9th International Conference on Human Computer Interaction Theory and Applications
562

sequent study (Wenk et al., 2023), where twenty
healthy participants performed the same task under
the same conditions and completed questionnaires to
assess cognitive load, motivation, usability, and em-
bodiment. While cognitive load remained unaffected
across technologies, VR was rated as more motivating
and usable than AR and 2D screens. Additionally, VR
and AR achieved higher levels of embodiment com-
pared to the 2D screen.
These studies align with our control hypothesis
H3 suggesting that immersive HMDs are better suited
for training 3D movements in VR-based therapy com-
pared to conventional 2D screens, and also have a pos-
itive effect on system’s usability and cognitive load.
However, as highlighted in the introduction, HMDs
are not always a feasible option. This motivates the
need to further evaluate the effects on users of differ-
ent non-immersive visualization modalities. Notably,
no other studies have specifically addressed the im-
pact of visualization modalities on user experience in
virtual environments.
3 EXPERIMENT
3.1 Participants
Participants were recruited voluntarily from the Uni-
versity of Genoa for a within-subject study evaluat-
ing the effects of four visualization modalities on par-
ticipants’ cognitive load, sense of presence, and us-
ability. Twenty-four healthy participants (8 female,
16 male), aged 20 to 56 years (26.71 ± 8.10), with
no known motor, cognitive disorders, or color blind-
ness took part. Most had little to no prior experience
with HMDs, and no compensation was provided. The
study complied with the Declaration of Helsinki.
3.2 Visualization Modalities
In this study, we evaluated four visualization modali-
ties (see Figure 1):
• VR: immersive VR using HMD;
• POV: non-immersive VR on 2D screen with
tracked perspective camera;
• PERSP: non-immersive VR on 2D screen with
fixed perspective camera;
• ORTHO: non-immersive VR on 2D screen with
fixed orthographic camera.
In the VR condition, participants used a fully im-
mersive HMD: the Meta Quest 2
3
. Hand movements
3
https://www.meta.com/it/quest/products/quest-2
Figure 1: The four visualization modalities considered in
the cognitive-motor dual-task.
were tracked using the XR Hands
4
Unity package,
while the body animation was handled with the Final
IK
5
plugin.
In the POV condition, participants experienced the
virtual environment (VE) on a 47” LG 47LM615S
screen (1920x1080 resolution) placed 155 cm away,
while seated on a fixed chair 112 cm from the screen
center (consistent across all non-immersive condi-
tions). In between the participant and the screen, a
ZED Mini depth camera
6
is positioned 35 cm ahead
of the monitor and tracks the user’s 3D pose, includ-
ing 38 body joints. In this way, the avatar’s arms and
the virtual rendering camera can move in sync with
the user’s arm and head movements, tracked by the
ZED device. A virtual perspective camera with a ver-
tical FOV of 75
◦
is used in this condition, and its 6
degrees of freedom (6DOF) pose is updated with re-
spect to the tracked 6DOF position of the users’ head.
In the PERSP condition, the same screen and ZED
setup were used, but the virtual perspective camera
was fixed with a 7
◦
downward tilt to ensure all shelves
were in view. Arm movements were tracked and
replicated into the virtual scene.
In the ORTHO condition, participants used the
same screen and setup, but in this condition, we use an
orthographic camera with a viewport size set so that
all the shelves are in the field of view. Again, only
arm movements were tracked and replicated.
In all conditions, a gender-neutral, light-skinned
full-body avatar downloaded from Adobe Mixamo
7
was used to match participants’ demographics. The
virtual environment (VE) featured light grey walls
and a wooden floor to minimize distractions.
4
https://docs.unity3d.com/Packages/com.unity.xr.
hands@1.5
5
http://root-motion.com/#final-ik
6
https://store.stereolabs.com/en-it/products/zed-mini
7
https://www.mixamo.com
Immersive versus Non-Immersive Virtual Reality Environments: Comparing Different Visualization Modalities in a Cognitive-Motor
Dual-Task
563

Figure 2: The shelving unit (left) and the types of cats
and flowers shown during the cognitive-motor task (right).
The white spheres (not shown during the experiment) on
the shelving highlight the position where objects were
spawned.
3.3 Experimental Setup
The experiment was conducted in a room with con-
trollable artificial lighting. The ZED Mini depth cam-
era was used across all visualization modalities to
record upper body movement data (head, trunk, and
arms) consistently.
The VE was developed using the Unity 3D game
engine (version 2022.3.23F 1, Unity Technologies,
USA). The ZED plugin version 4.1 for Unity 3D han-
dled motion tracking. The avatar was animated using
the IMMERSE framework (Viola et al., 2024) which
requires a brief calibration phase at the start of the VR
session to adapt the avatar to participants’ body pro-
portions.
The workstation operated on Windows 11 Home
64-bit (Microsoft, USA), equipped with an AMD
Ryzen 9 5900X processor (12 cores/32 threads) and
an NVIDIA RTX 3080 Ti graphics card.
3.4 The Dual Cognitive-Motor Task
Participants performed the same dual-task across dif-
ferent visualization modalities. A shelving unit with
nine fixed positions, arranged in a 3x3 square layout
at equal depth, was placed centrally in front of them
(see Figure 2). To exclude depth estimation cues,
all objects were positioned equidistant from the user.
Objects included three types of cats (white, black,
tabby) and three types of flowers (pink, blue, yellow),
all of the same size (see Figure 2).
For the motor task, participants were instructed to
reach for pink flowers using their bare hands, tracked
and displayed in the virtual environment. Reaching
could be executed with either hand without specific
arm positioning instructions, though most rested their
arms on their laps. Successfully reaching an item
made it disappear with a pop sound for auditory feed-
back. For the cognitive task, participants counted
aloud the cats appearing on the shelves.
The items were presented in four blocks of in-
creasing difficulty: Block 1 had one item per trial,
Block 2 had two, Block 3 had three, and Block 4
had four items. Each block consisted of 7 trials (so
for each modality, users are exposed to 28 trials), in-
cluding a final randomized trial added to vary the cat
count. Each trial lasted 5 seconds or ended earlier if
all items were reached. Trials within each block were
randomized, while block order remained sequential to
ensure progressive difficulty.
3.5 Procedure
A demo video of the experiment is shown here
8
.
A researcher was present throughout the experi-
ment. After a briefing on the task objectives, partic-
ipants completed a brief training session to confirm
their understanding. They then performed the dual
cognitive-motor task in VR, followed by the three
non-immersive modalities (POV, PERSP, ORTHO) in
a randomized order. The six possible modality orders
were evenly distributed among participants (four per
order).
At the start of each condition, participants were in-
formed of the current visualization modality. Before
the VR task, a calibration phase ensured the shelving
unit was positioned at shoulder height and equidistant
from the user by having participants hold their arms
up at shoulder level, palms down.
After VR, the system automatically calibrated the
avatar’s position to align with the shelving and cam-
era for the subsequent non-immersive modality. At
the end of each condition, participants completed self-
assessment questionnaires on sense of presence, us-
ability, and perceived cognitive load. Finally, partici-
pants ranked the visualization modalities in a tier list
based on their preference.
3.6 Instruments
To assess participants’ sense of presence, we used the
Igroup Presence Questionnaire (IPQ) (Schubert et al.,
2001), a 14-question tool on a 7-point Likert scale
(0–6) measuring three key aspects:
• Spatial Presence (SP), the sense of being physi-
cally present in the virtual environment;
• Involvement (INV), measuring attention and en-
gagement with the virtual environment;
• Experienced Realism (REAL), assessing the per-
ceived realism of the virtual environment.
Additionally, one item evaluates the general sense
of “being there” (PRES), which encompasses spatial
presence, emotional engagement, and cognitive in-
volvement, along with the illusion of ownership over
8
https://youtu.be/k1AMaxmxgAM
HUCAPP 2025 - 9th International Conference on Human Computer Interaction Theory and Applications
564
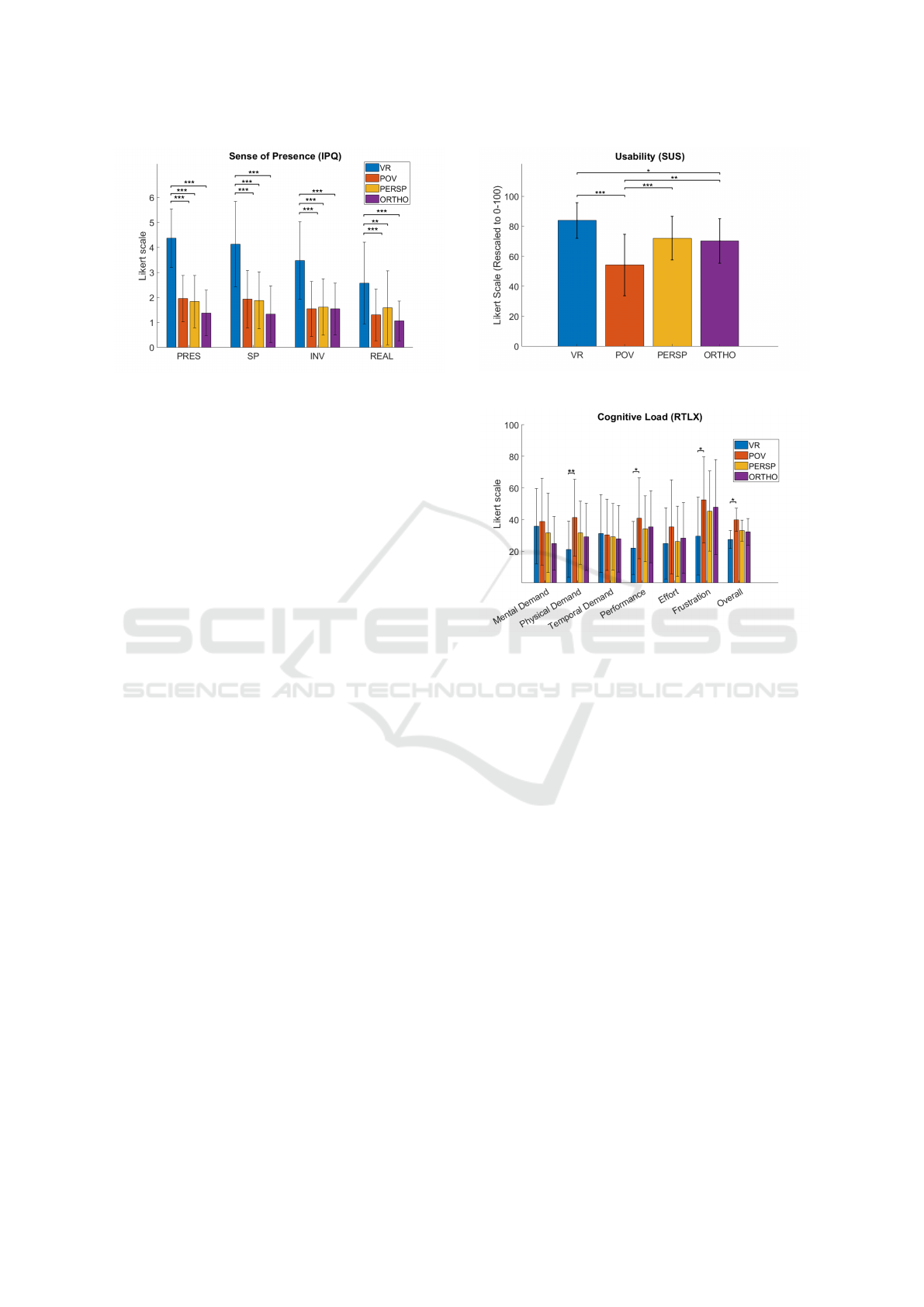
Figure 3: The IPQ results are reported for the three sub-
scales: spatial presence (SP), involvement (INV), and ex-
perienced realism (REAL). Lastly, PRES refers to the addi-
tional item for the general sense of “being there”.
a virtual body (Slater et al., 2022; Hartmann et al.,
2015).
To evaluate usability, we employed the System
Usability Scale (SUS) (Brooke et al., 1996), a 10-
question, 5-point Likert scale. Raw scores are re-
scaled to a 1–100 range, where 68 is the average
score:
• Below 51 indicates serious usability issues;
• Scores around 68 suggest room for improvement;
• Above 80.3 signifies excellent usability.
This scoring is the result of a statistical analysis of
three different datasets of SUS questionnaires, en-
compassing nearly 450 studies.
For cognitive load, we combined task perfor-
mance scores with the Raw Task Load Index (RTLX)
(Hart, 2006), a shortened version of the NASA Task
Load Index (Hart and Staveland, 1988). The RTLX
uses six sub-scales to measure mental, physical, and
temporal demand, as well as performance, effort, and
frustration, with responses rated on a 100-point Likert
scale.
4 RESULTS
Figure 3 shows the results of the IPQ. A one-way re-
peated measures ANOVA was conducted to examine
variations in IPQ subjective reports across different
modalities. The significance threshold was set at α =
0.05, with post-hoc analysis performed where neces-
sary to identify differences between specific condi-
tions. The VR condition demonstrated higher IPQ
scores across all considered aspects. In the corre-
sponding figure, asterisks indicate the presence of sta-
tistically significant difference, and their number rep-
Figure 4: The SUS questionnaire results.
Figure 5: The RTLX questionnaire results.
resents its level: one asterisk for p ≤ 0.05, two for
p ≤ 10
−2
, and three for p ≤ 10
−3
.
ANOVA was conducted to analyze differences
among visualization modalities in usability and to ex-
plore variations in SUS subjective reports. As shown
in Figure 4, the VR modality achieved an average
usability score of 83.85, indicating optimal usability
and ranking first among the four modalities. PERSP
and ORTHO, with scores of 72.08 and 70.31 respec-
tively, demonstrated usability slightly above the pass-
ing grade. Lastly, POV is below the usability thresh-
old, with a SUS score of 54.17: following the litera-
ture results, it is not unusable but does have some us-
ability issues. Asterisks indicate the presence of sig-
nificant difference following the same rules as those
used for the IPQ score.
As shown in Figure 5, for the cognitive load, VR
and POV modalities showed statistically significant
differences, through ANOVA analysis, in the physical
demand, performance, and frustration sub-scales in-
dividually and in the overall score. Also here, the as-
terisks indicate a significant difference emerged from
the post-hoc analysis, following the same conventions
described previously.
In Figure 6, we present the errors made by par-
Immersive versus Non-Immersive Virtual Reality Environments: Comparing Different Visualization Modalities in a Cognitive-Motor
Dual-Task
565
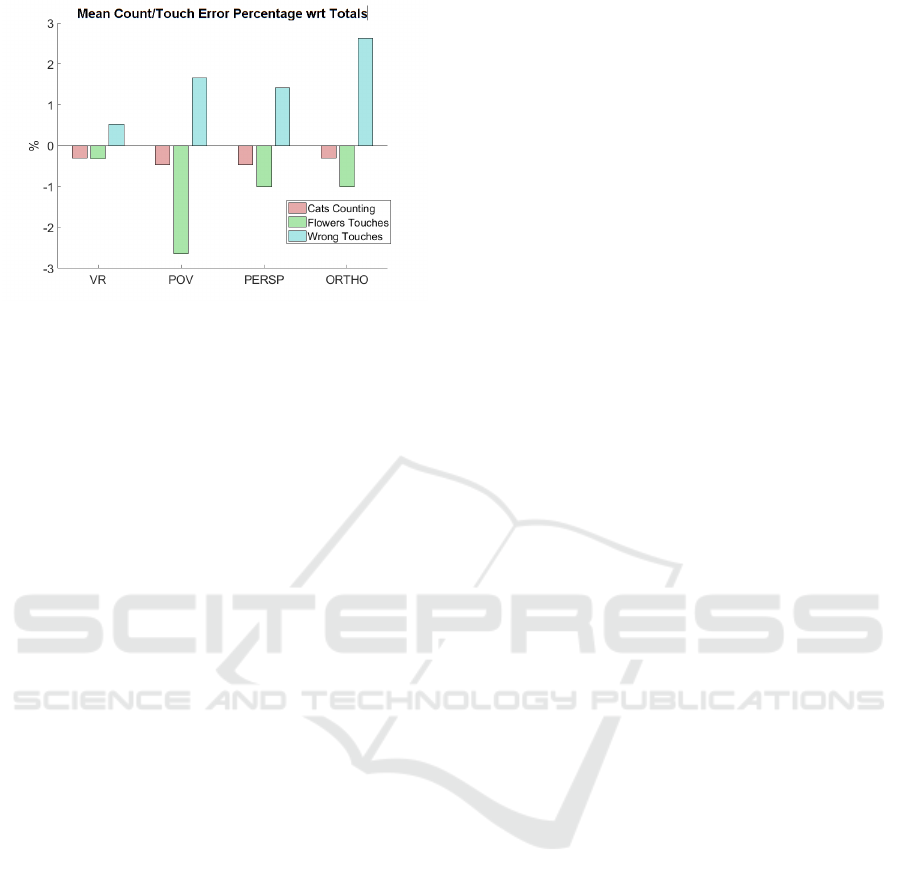
Figure 6: Mean percentage errors in the cognitive-motor
task. In particular, we have: the amount of miscounted cats
with respect to the total amount of shown cats (in pink);
the mean percentage error for the reaching task, i.e., the
number of untouched target flowers with respect to the total
amount of target shown flowers (in green); and the mean
percentage of wrongly touched objects (objects that should
not be touched but were, in blue).
ticipants during the cognitive-motor task experiment.
Specifically, we calculate the mean percentage er-
ror for the cognitive task (miscounted cats relative to
the total shown), the reaching task (untouched target
flowers relative to the total shown), and the percent-
age of wrongly touched objects (cats or non-target
flowers).
The number of miscounted cats (pink) can theoret-
ically be positive or negative, as users might overesti-
mate or underestimate the count. However, the graph
shows negative values, reflecting a general tendency
to underestimate. The number of untouched target
flowers (green) is inherently negative, indicating fail-
ures to touch required flowers. Lastly, the percentage
of wrongly touched objects (blue) is always positive,
as it measures incorrect touches relative to the total
displayed.
5 DISCUSSION
Among the three non-immersive visualization modal-
ities, the POV condition is, in principle, the most simi-
lar to immersive VR. Indeed, in this modality, the vir-
tual camera pose is continuously updated according
to the tracked user position, as it happens in HMDs.
The PERSP and ORTHO conditions do not update
the pose of the virtual camera, and they are often
preferred in order to avoid discomfort. The PERSP
condition allows us to maintain depth cues, like per-
spective, but it could generate distortions due to the
fact that the projection plane and the virtual cam-
era parameters are different with respect to the ob-
server’s ones. To this aim, sometimes people prefer
not to have these distortions, thus using the ORTHO
condition, in which perspective division is no longer
present and depth cues are eliminated.
Firstly, the results support our control hypothesis
H3 about the superiority of the immersive condition
with respect to other modalities both in terms of pres-
ence and usability, with IPQ scores and SUS scores
significantly higher. While no significant differences
in cognitive load (RTLX) were found between VR
and ORTHO or PERSP, immersive VR showed lower
cognitive load than POV and achieved the lowest er-
ror rates in the motor task (0.5% wrong targets, 0.3%
missed flowers), confirming its advantage in motor
tasks. These findings align with the previous result.
The absence of a significant difference in cognitive
load between the immersive and non-immersive con-
ditions might be due to the task itself.
Then, we aimed to understand whether POV visu-
alization is the best approximation of immersive VR.
Our results seem to reject the H1 hypothesis. Indeed,
POV visualization does not provide a better sense of
presence, better usability, or a lower cognitive load.
Regarding presence, the POV condition, like other
non-immersive conditions, shows significant differ-
ences compared to immersive VR, but no significant
differences were found between POV and the other
non-immersive conditions. For usability, the score
was 54.17, significantly lower than all other modal-
ities, which exceeded the usability threshold of 68
mentioned in 3.6. This is reflected in the RTLX re-
sults, which show significant differences from the im-
mersive condition in physical demand, performance,
frustration, and overall experience. Additionally, the
reaching task results indicate more errors in the POV
condition, with 1.6% of wrongly touched targets and
2.5% of missed pink flowers. This usability issue may
be due to the specific implementation of the POV vi-
sualization technique. As shown in Figure 7 (left),
the frustum follows the tracked head position, caus-
ing the projection of a virtual object O to shift left on
the screen during rightward head movement, unlike
real-world perception. An ecological implementation
(Figure 7, right) uses an asymmetric frustum with the
focal plane aligned to the screen, making the projec-
tion shift right, as in the real world. It is worth noting
that, given the setup and the task required of the par-
ticipants, the amount of head rotation observed during
the experiments was quite limited. As a result, their
perception was not significantly different from what
they would have experienced with the ecological im-
plementation. However, a focal plane at a different
position would still cause incorrect motion (see (So-
lari et al., 2013) for the stereoscopic case).
HUCAPP 2025 - 9th International Conference on Human Computer Interaction Theory and Applications
566
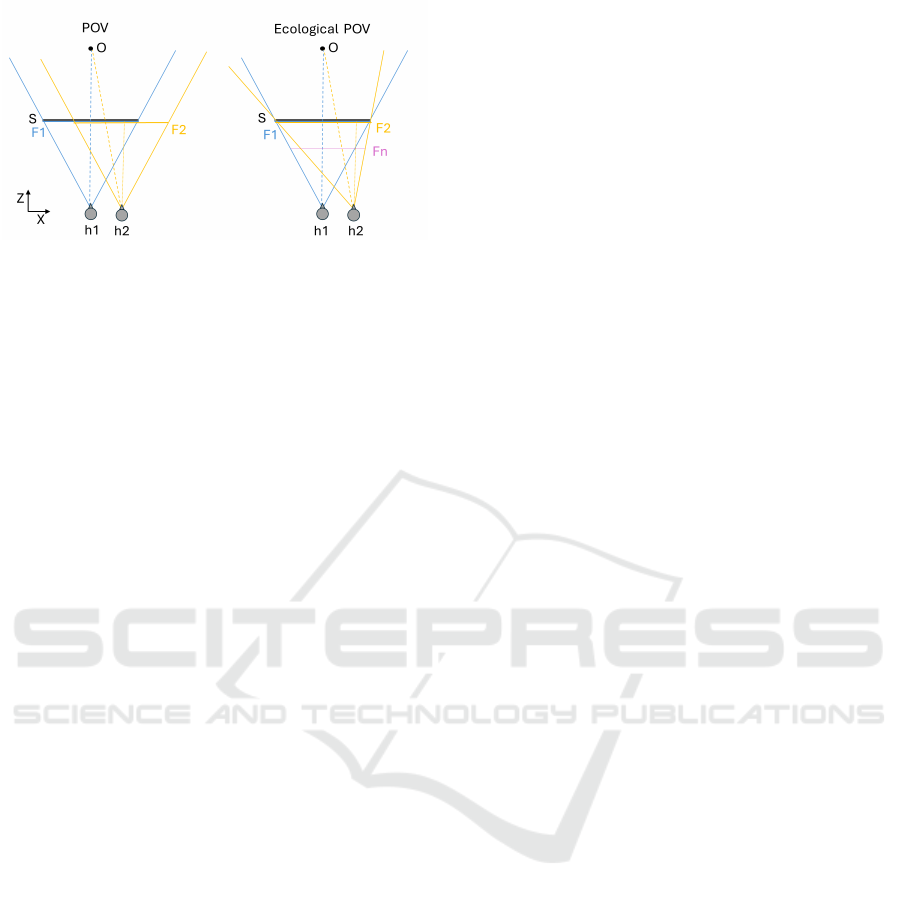
Figure 7: A sketch of the geometry for the POV visualiza-
tion technique: a view from above (X-Z plane). Two head
positions (h
1
and h
2
) and a virtual object (O) are consid-
ered. The screen (S) and the frustum with the relative focal
plane (F
1
) are also drawn: specifically, F
1
and dark blue for
h
1
, and F
2
and orange for h
2
(dashed lines denote the pro-
jection rays). (left) The current implementation of the POV:
the frustum follows the tracked head. (right) An ecologi-
cal implementation of the POV (the purple F
n
shows a focal
plane in a different position).
Finally, our results confirm that the PERSP and
ORTHO visualization modalities are characterized by
a comparable sense of presence, usability, and cogni-
tive load (H2 accepted). Looking at the results, it is
worth noting that the PERSP modality shows higher
(though not significant) values of the presence and
spatial presence factors in the IPQ. Moreover, though
the percentage of errors in the counting task and in
the pink flower reaching task are comparable between
the two modalities, the ORTHO visualization shows
a slightly higher percentage of wrongly touched ob-
jects. These results may confirm the added value of
perspective cues in 2D visualization.
At the end of the experiments, we also asked the
participants to provide a ranking of the visualization
modalities. Their choices allowed us to have the fol-
lowing ranking: 1) immersive VR, 2) PERSP, 3) OR-
THO, and finally, 4) POV. This ranking maps exactly
to the obtained quantitative results.
6 CONCLUSION AND FUTURE
WORK
In this paper, we have compared four visualization
techniques considering a cognitive-motor dual task.
This work is motivated by the fact that in some spe-
cific contexts, such as healthcare, immersive visual-
ization is not possible and for this reason we aimed
to provide a guidance on non-immersive visualization
modalities to developers working in this field.
Results shows that immersive VR (HMD) out-
performs the non-immersive visualization modalities.
Although there are few statistically significant dif-
ferences between immersive VR and non-immersive
methods, immersive VR excelled in cognitive (count-
ing) and motor (reaching) tasks. Furthermore, immer-
sive VR significantly surpassed the non-immersive
conditions in terms of users’ sense of presence and
usability. Contrary to our expectations, our imple-
mentation of a non-immersive visualization that ac-
counts for users’ head movements does not outper-
form the fixed non-immersive modalities (PERSP and
ORTHO). Indeed, the implemented POV technique
shows the worst results in terms of usability and cog-
nitive load. Lastly, fixed non-immersive visualization
techniques do not show significant differences with
respect to the kind of projection (perspective or ortho-
graphic). However, perspective one is more appreci-
ated and slightly better in terms of percentage errors.
Our analysis has several limitations. First, the
POV implementation shows discrepancies in projec-
tions compared to the real world. An ecological
POV with an asymmetric frustum, as shown in Fig-
ure 7, should be implemented to reassess H1. Ad-
ditionally, the low error rates in cognitive and mo-
tor tasks suggest that a more complex dual-task could
better highlight differences between modalities. We
also observed qualitative differences in arm trajecto-
ries during the reaching task, warranting further anal-
ysis of potential non-natural behavior. Future work
will incorporate an ecologically valid POV, investi-
gate screen distance effects, and explore how differ-
ent modalities impact movement naturalness. We also
plan to evaluate the impact of these modalities on
users’ embodiment, using the embodiment question-
naire from (Gonzalez-Franco and Peck, 2018).
ACKNOWLEDGEMENTS
This work was supported by the Italian Ministry of
Research, under the complementary actions to the
NRRP “Fit4MedRob - Fit for Medical Robotics”
Grant (# PNC0000007).
REFERENCES
Bassano, C., Chessa, M., and Solari, F. (2022). Visual-
ization and interaction technologies in serious and ex-
ergames for cognitive assessment and training: A sur-
vey on available solutions and their validation. IEEE
Access, 10:104295–104312.
Baumeister, J., Ssin, S. Y., ElSayed, N. A., Dorrian, J.,
Webb, D. P., Walsh, J. A., Simon, T. M., Irlitti,
A., Smith, R. T., Kohler, M., et al. (2017). Cogni-
tive cost of using augmented reality displays. IEEE
Immersive versus Non-Immersive Virtual Reality Environments: Comparing Different Visualization Modalities in a Cognitive-Motor
Dual-Task
567

transactions on visualization and computer graphics,
23(11):2378–2388.
Boyd, C. (1997). Does immersion make a virtual environ-
ment more usable? In CHI’97 Extended Abstracts
on Human Factors in Computing Systems, pages 325–
326.
Brooke, J. et al. (1996). Sus-a quick and dirty usability
scale. Usability evaluation in industry, 189(194):4–7.
Carlier, S., Van der Paelt, S., Ongenae, F., De Backere, F.,
and De Turck, F. (2020). Empowering children with
asd and their parents: design of a serious game for
anxiety and stress reduction. Sensors, 20(4):966.
Ehioghae, M., Montoya, A., Keshav, R., Vippa, T. K.,
Manuk-Hakobyan, H., Hasoon, J., Kaye, A. D., and
Urits, I. (2024). Effectiveness of virtual reality–based
rehabilitation interventions in improving postopera-
tive outcomes for orthopedic surgery patients. Current
Pain and Headache Reports, 28(1):37–45.
Garzotto, F., Gianotti, M., Patti, A., Pentimalli, F., and
Vona, F. (2024). Empowering persons with autism
through cross-reality and conversational agents. IEEE
Transactions on Visualization and Computer Graph-
ics.
Gonzalez-Franco, M. and Peck, T. C. (2018). Avatar
embodiment. towards a standardized questionnaire.
Frontiers in Robotics and AI, 5:74.
Hart, S. G. (2006). Nasa-task load index (nasa-tlx); 20 years
later. In Proceedings of the human factors and er-
gonomics society annual meeting, volume 50, pages
904–908. Sage publications Sage CA: Los Angeles,
CA.
Hart, S. G. and Staveland, L. E. (1988). Development of
nasa-tlx (task load index): Results of empirical and
theoretical research. In Advances in psychology, vol-
ume 52, pages 139–183. Elsevier.
Hartmann, T., Wirth, W., Schramm, H., Klimmt, C.,
Vorderer, P., Gysbers, A., B
¨
ocking, S., Ravaja, N.,
Laarni, J., Saari, T., et al. (2015). The spatial presence
experience scale (spes). Journal of Media Psychology.
Landers, R. N. (2014). Developing a theory of gamified
learning: Linking serious games and gamification of
learning. Simulation & gaming, 45(6):752–768.
Lee, J., Phu, S., Lord, S., and Okubo, Y. (2024). Effects
of immersive virtual reality training on balance, gait
and mobility in older adults: a systematic review and
meta-analysis. Gait & Posture.
Malihi, M., Nguyen, J., Cardy, R. E., Eldon, S., Petta, C.,
and Kushki, A. (2020). Evaluating the safety and
usability of head-mounted virtual reality compared
to monitor-displayed video for children with autism
spectrum disorder. Autism, 24(7):1924–1929.
Pallavicini, F., Pepe, A., and Minissi, M. E. (2019). Gaming
in virtual reality: What changes in terms of usability,
emotional response and sense of presence compared
to non-immersive video games? Simulation & Gam-
ing, 50(2):136–159.
Rao, A. K., Choudhary, G., Negi, R., and Dutt, V. (2023).
Is virtual reality better than desktop-based cognitive
training? A neurobehavioral evaluation of visual pro-
cessing and transfer performance. In Bruder, G.,
Olivier, A., Cunningham, A., Peng, Y. E., Grubert, J.,
and Williams, I., editors, IEEE International Sympo-
sium on Mixed and Augmented Reality Adjunct, IS-
MAR 2023, Sydney, Australia, October 16-20, 2023,
pages 308–314. IEEE.
Ren, Y., Wang, Q., Liu, H., Wang, G., and Lu, A.
(2024). Effects of immersive and non-immersive vir-
tual reality-based rehabilitation training on cognition,
motor function, and daily functioning in patients with
mild cognitive impairment or dementia: A system-
atic review and meta-analysis. Clinical Rehabilita-
tion, 38(3):305–321.
Schubert, T., Friedmann, F., and Regenbrecht, H. (2001).
The experience of presence: Factor analytic insights.
Presence: Teleoperators & Virtual Environments,
10(3):266–281.
Slater, M., Banakou, D., Beacco, A., Gallego, J., Macia-
Varela, F., and Oliva, R. (2022). A separate reality:
An update on place illusion and plausibility in virtual
reality. Frontiers in virtual reality, 3:914392.
Solari, F., Chessa, M., Garibotti, M., and Sabatini, S. P.
(2013). Natural perception in dynamic stereo-
scopic augmented reality environments. Displays,
34(2):142–152.
Souchet, A. D., Diallo, M. L., and Lourdeaux, D. (2022).
Cognitive load classification with a stroop task in vir-
tual reality based on physiological data. In Duh, H.
B. L., Williams, I., Grubert, J., Jones, J. A., and
Zheng, J., editors, IEEE International Symposium on
Mixed and Augmented Reality, ISMAR 2022, Singa-
pore, October 17-21, 2022, pages 656–666. IEEE.
Sud
´
ar, A. and Csap
´
o,
´
A. B. (2024). Comparing desktop 3d
virtual reality with web 2.0 interfaces: Identifying key
factors behind enhanced user capabilities. Heliyon.
Viola, E., Martini, M., Solari, F., and Chessa, M. (2024).
Immerse: Immersive environment for representing
self-avatar easily. In 2024 IEEE Gaming, Enter-
tainment, and Media Conference (GEM), pages 1–6.
IEEE.
Wenk, N., Buetler, K. A., Penalver-Andres, J., M
¨
uri, R. M.,
and Marchal-Crespo, L. (2022). Naturalistic visual-
ization of reaching movements using head-mounted
displays improves movement quality compared to
conventional computer screens and proves high us-
ability. Journal of NeuroEngineering and Rehabili-
tation, 19(1):137.
Wenk, N., Penalver-Andres, J., Buetler, K. A., Nef, T.,
M
¨
uri, R. M., and Marchal-Crespo, L. (2023). Effect
of immersive visualization technologies on cognitive
load, motivation, usability, and embodiment. Virtual
Reality, 27(1):307–331.
Wenk, N., Penalver-Andres, J., Palma, R., Buetler, K. A.,
M
¨
uri, R., Nef, T., and Marchal-Crespo, L. (2019).
Reaching in several realities: motor and cognitive
benefits of different visualization technologies. In
2019 IEEE 16th International Conference on Rehabil-
itation Robotics (ICORR), pages 1037–1042. IEEE.
HUCAPP 2025 - 9th International Conference on Human Computer Interaction Theory and Applications
568
