
Dawn: A Robust Tone Mapping Operator for Multi-Illuminant and
Low-Light Scenarios
Furkan Kınlı
1 a
, Barıs¸
¨
Ozcan
2 b
and Furkan Kırac¸
1 c
1
Department of Computer Science,
¨
Ozye
˘
gin University,
˙
Istanbul, Turkey
2
Department of Computer Engineering, Bahc¸es¸ehir University,
˙
Istanbul, Turkey
{furkan.kinli, furkan.kirac}@ozyegin.edu.tr, baris.ozcan@bau.edu.tr
Keywords:
High Dynamic Range, Image Statistics, Low-Light Imaging, Naka-Rushton Equation, Tone Mapping
Operator, Retinex.
Abstract:
We introduce Dawn, a novel Tone Mapping Operator (TMO) designed to address the limitations of state-
of-the-art TMOs such as Flash and Storm, particularly in challenging lighting conditions. While existing
methods perform well in stable, well-lit, single-illuminant environments, they struggle with multi-illuminant
and low-light scenarios, often leading to artifacts, amplified noise, and color shifts due to the additional step
to adjust overall scene brightness. Dawn solves these issues by adaptively inferring the scaling parameter for
the Naka-Rushton Equation through a weighted combination of luminance mean and variance. This dynamic
approach allows Dawn to handle varying illuminant conditions, reducing artifacts and improving image quality
without requiring additional adjustments to scene brightness. Our experiments show that Dawn matches the
performance of current state-of-the-art TMOs on HDR datasets and outperforms them in low-light conditions,
providing superior visual results. The source code for Dawn will be available at https://github.com/birdortyedi/
dawn-tmo/.
1 INTRODUCTION
Tone Mapping Operators (TMOs) are essential in
High Dynamic Range (HDR) imaging, enabling the
compression of HDR content into a Standard Dy-
namic Range (SDR) format while preserving essen-
tial visual details. TMOs typically operate on the lu-
minance channel, often calculated from the Y chan-
nel in the YUV color space (Koschan and Abidi,
2008), with alternative representations available in
other color spaces such as HSV, HSL and Lab (Bani
´
c
and Lon
ˇ
cari
´
c, 2014; Nguyen and Brown, 2017). Two
major categories of TMOs exist: global and local.
Global TMOs apply the same transformation to all
pixels, offering faster processing and making them
more suitable for real-time applications (Tumblin and
Rushmeier, 1993; Larson et al., 1997). On the other
hand, local TMOs process intensities based on spatial
location by providing higher quality results at the cost
of increased computational complexity (Durand and
Dorsey, 2002; Reinhard et al., 2023; Mantiuk et al.,
2006; Mantiuk et al., 2008).
a
https://orcid.org/0000-0002-9192-6583
b
https://orcid.org/0000-0001-8598-1239
c
https://orcid.org/0000-0001-9177-0489
Recent advances in tone mapping literature (Bani
´
c
and Lon
ˇ
cari
´
c, 2016; Banic and Loncaric, 2018) have
focused on achieving a balance between computa-
tional efficiency and image quality. These operators,
commonly known as Flash and Storm, use the Naka-
Rushton equation to model the human visual response
to the luminance channel and offer a per-pixel com-
plexity of O(1), which makes them highly practical
for real-time applications. However, their effective-
ness is limited to well-lit, single-illuminant condi-
tions. In more complex scenarios, such as low-light or
multi-illuminant scenes, these TMOs often introduce
artifacts such as noise amplification and color distor-
tions, shown in Figure 1. Although deep learning-
based TMOs have shown promising results, they de-
mand significant computational resources, making
them unsuitable for real-time applications. Evaluat-
ing deep learning methods would also require addi-
tional performance metrics, such as training time and
memory usage, which would shift the focus away
from our primary objective of developing an adap-
tive, non-learning-based solution optimized for real-
time tone mapping. For these reasons, deep learning
approaches are considered beyond the scope of this
study.
62
Kınlı, F., Özcan, B. and Kıraç, F.
Dawn: A Robust Tone Mapping Operator for Multi-Illuminant and Low-Light Scenarios.
DOI: 10.5220/0013134600003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 3: VISAPP, pages
62-68
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
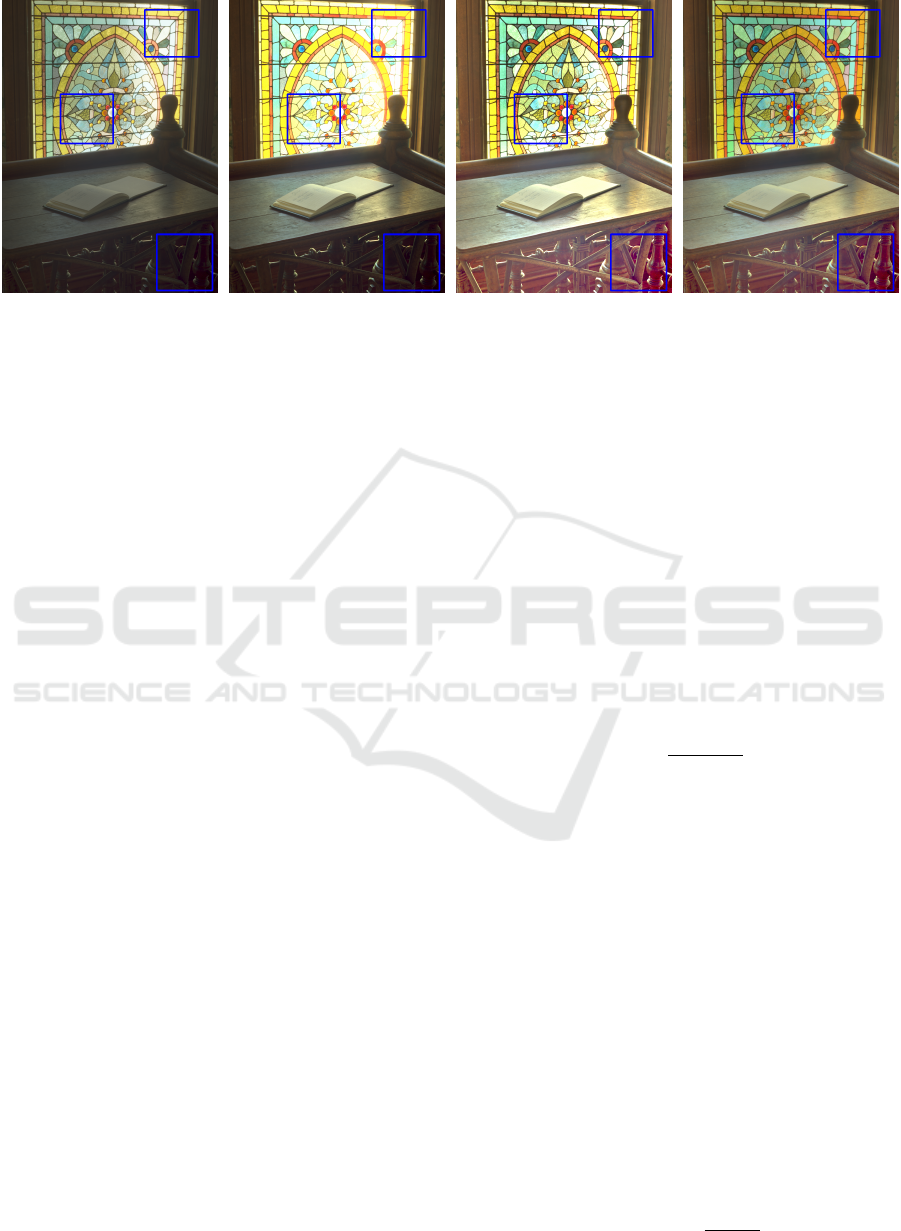
(a) Reinhard (b) Flash
10
+L
110
(c) Storm
20
(d) Dawn (ours)
Figure 1: Comparison of tone mapping results in complex lighting conditions. Flash and Storm (Banic and Loncaric, 2018)
produce noise amplification and color distortions, as exemplified in regions marked with blue boxes, while Dawn effectively
handles challenging scenarios by preserving image quality.
In response to the limitations of current TMOs in
low-light and multi-illuminant scenarios, we propose
Dawn, a novel TMO designed to dynamically adapt to
varying lighting conditions in scenes. Dawn leverages
image statistics—specifically, the luminance mean
and variance—to infer the scaling parameter for the
Naka-Rushton Equation, allowing it to reduce arti-
facts and preserve color distribution and image qual-
ity. Our method provides significant improvements in
challenging scenarios where existing TMOs struggle,
offering robust performance while maintaining com-
putational efficiency.
Our contributions can be summarized as follows.
• Adaptation to Complex Lighting. Dawn in-
troduces a robust method for handling multi-
illuminant and low-light conditions, significantly
reducing noise and color distortions.
• Dynamic Scaling Mechanism. By using im-
age luminance statistics to infer the Naka-Rushton
scaling parameter adaptively, Dawn outperforms
the current state-of-the-art TMOs using a static or
user-defined scaling parameter in challenging sce-
narios.
• Overall Robust Performance. Experimental re-
sults demonstrate that Dawn matches the perfor-
mance of existing TMOs in HDR dataset (Ward,
2015) and outperforms them in scenes containing
low-light and multi-illuminant cases.
2 METHODOLOGY
In this section, we describe the methodology be-
hind Dawn, a novel Tone Mapping Operator (TMO)
that builds upon the foundation of Flash, introducing
a more robust and adaptive scaling mechanism that
eliminates the need for static or user-defined scaling,
and avoids additional brightness adjustments.
2.1 Flash: The Foundation
Flash, introduced by (Banic and Loncaric, 2018), uti-
lizes a global tone mapping approach that compresses
the luminance values of HDR images using the Naka-
Rushton equation. This method applies a global trans-
formation uniformly to all pixels, which makes the
mapping operator computationally efficient. The core
equation is formulated as follows.
L
′
=
L
L + a · L
w
(1)
where L represents pixel luminance, L
w
is the geo-
metric mean luminance (i.e., image key), and a is a
static or user-defined scaling parameter. This static
scaling parameter, while efficient, is unable to adapt
to varying lighting conditions within an image, result-
ing in suboptimal performance in complex scenarios
containing very bright or low-lit areas in the scene.
To mitigate suboptimal results, Flash employs an
additional step, called Leap, which adjusts the overall
brightness of the tone-mapped image. Leap is an op-
tional post-processing step intended to correct global
brightness by normalizing the mean luminance of the
tone-mapped image to a predefined target mean value.
Specifically, it is used to ensure that the final LDR
output maintains a consistent brightness, particularly
when the static scaling parameter a in Flash does not
account for the image’s varying luminance distribu-
tion. The equation for Leap is applied as follows
L
′
Leap
= L
′
·
M
target
M
output
(2)
Dawn: A Robust Tone Mapping Operator for Multi-Illuminant and Low-Light Scenarios
63

where M
target
is the target mean of L (i.e., predefined
or user-defined) and M
output
is the mean luminance of
the tone-mapped image.
While Leap helps maintain consistent brightness
in Flash, its reliance on a user-defined target mean lu-
minance introduces complexity and reduces flexibil-
ity. This dependency may not be optimal for all im-
ages or lighting conditions, particularly in challeng-
ing scenarios such as varying illuminant sources or
dynamic lighting environments. In these cases, man-
ual adjustment of the target mean can exacerbate in-
consistencies, leading to suboptimal tone mapping re-
sults.
2.2 Dawn: Robust and Adaptive Scaling
for Flash
To address the limitations of Flash and Storm in com-
plex lighting conditions, we propose Dawn, a novel
Tone Mapping Operator (TMO) that introduces an
adaptive scaling mechanism into the core equation.
Unlike the static or user-defined scaling parameters
used by Flash, Dawn dynamically adjusts the scaling
parameter a based on the luminance statistics of the
image. This adaptive approach eliminates the need for
Leap and inherently handles brightness normalization
throughout the tone mapping process.
The adaptive scaling parameter a for Dawn is
computed using the following equation
a = k
1
· µ
L
+ k
2
· σ
L
+ k
3
(3)
where µ
L
and σ
L
represent the mean and variance of
the luminance values, respectively. The constants k
1
,
k
2
, and k
3
play a crucial role in this computation, as
they control the influence of brightness and contrast
on the scaling mechanism. Specifically, k
1
adjusts the
contribution of the mean luminance µ
L
, affecting the
overall brightness response, while k
2
determines how
much variance σ
L
affects contrast adaptation. The
constant k
3
serves as a base value, ensuring stability in
different luminance ranges. By fine-tuning these con-
stants, Dawn can be tailored to provide optimal tone
mapping in a wide range of lighting conditions.
By leveraging image statistics and sweeping post-
processing corrections away, Dawn continuously
adapts the tone mapping process to each image’s lu-
minance distribution, which ensures smooth transi-
tions in sudden brightness changes, minimized arti-
facts, and optimal brightness. This dynamic scaling
mechanism allows Dawn to handle varying bright-
ness levels and contrasts more effectively than static
parameters. This makes this approach more robust
in delivering higher-quality outputs in both low-light
and multi-illuminant scenes.
2.3 Why Adaptive Scaling Improves
Quality
The adaptive scaling mechanism in Dawn offers sig-
nificant advantages over static parameters by dynamic
adjustment with respect to the luminance statistics of
each image. In low-light conditions, the Leap op-
eration proposed in (Banic and Loncaric, 2018) fre-
quently amplifies noise as it tries to globally adjust
brightness and enhance contrast. In contrast, Dawn
adapts to luminance variance locally, selectively in-
creasing contrast and recovering details by inject-
ing less amount of noise. Next, in multi-illuminant
scenes, where static scaling often causes color shifts
or haloing, Dawn leads to adjusting to brightness vari-
ations in different regions, which tailors the tone map-
ping to specific lighting conditions and minimizing
these artifacts. Moreover, Dawn ensures consistent
tone mapping across regions with varying brightness,
such as shadows, midtones, and highlights, maintain-
ing balanced exposure throughout the scene. This
adaptability, which does not require manual adjust-
ments or predefined parameters, enables Dawn to
handle a wide range of lighting scenarios, from high-
contrast daylight to complex, low-light environments,
with ease and reliability.
2.4 Nonlinear Scaling for Complex
Scenarios
In more extreme lighting environments, Dawn can
employ an optional nonlinear scaling variant to fur-
ther enhance performance. The scaling parameter in
this case is computed as
a = exp(k
1
· µ
L
) + k
2
· log(1 + σ
L
) (4)
where µ
L
represents the mean luminance of the image,
and σ
L
is the variance of the luminance values, which
captures the contrast within the image. The constants
k
1
and k
2
control the contribution of the mean and
variance to the scaling process, respectively. Specif-
ically, k
1
governs the degree to which the mean lu-
minance influences the exponential adjustment, while
k
2
determines the impact of the variance on the loga-
rithmic correction. The addition of 1 to the logarith-
mic function ensures numerical stability when han-
dling low contrast values.
This nonlinear approach emphasizes the dynamic
response to rapid changes in luminance, offering
greater flexibility in complex scenarios. By applying
exponential and logarithmic transformations, Dawn
can adapt more aggressively to scenes with large
variations in brightness or contrast, ensuring better
preservation of detail and consistency of tone.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
64

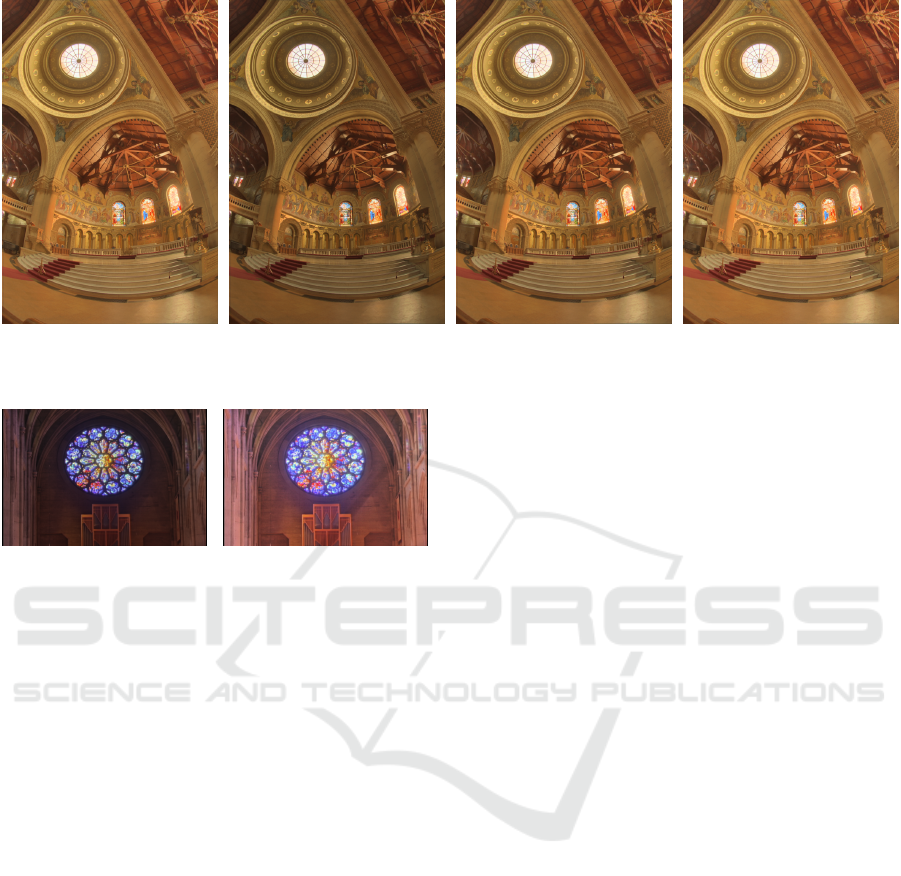
(a) Drago (b) Reinhard (c) Flash
10
+L
110
(d) Storm
20-(..,
1
16
)
+L
110
(e) Dawn (ours)
Figure 2: Comparison of Tone Mapping Operators (TMOs) across different scenes.
2.5 Implementation Details
The implementation of Dawn retains the computa-
tional efficiency of Flash and Storm, maintaining a
per-pixel complexity of O(1), which is crucial for
real-time applications. However, unlike Flash, Dawn
dynamically adjusts the scaling parameter a based on
the luminance statistics of the image and eliminates
the need for additional brightness correction steps
such as Leap.
The processing starts by calculating the maximum
luminance value, v = max(R, G, B), where R, G, and
B are the red, green, and blue channels of the pixel.
Using either the adaptive or nonlinear scaling strat-
egy, the scaling parameter a is calculated based on
the luminance mean (µ
L
) and variance (σ
L
). The final
luminance value with the nonlinear approach for each
pixel is calculated using the following equation
L
′
=
L
L + (exp(k
1
· µ
L
) + k
2
· log(1 + σ
L
)) · L
w
(5)
By relying on this dynamic scaling mechanism,
Dawn ensures a more natural tone-mapped image,
eliminating the need for post-processing brightness
adjustments, such as Leap. This simplifies the tone
mapping pipeline and reduces the reliance on hyper-
parameters, making the method more flexible and ro-
bust across different lighting conditions. Finally, a
gamma correction is applied to adjust the brightness
and contrast of the tone-mapped image. After gamma
correction, the pixel values are clipped to the valid
dynamic range (i.e., [0, 1]).
In our implementation, the constants are set to
k
1
= 0.5, k
2
= 0.5, and k
3
= 1.0, striking a bal-
ance between the luminance mean and variance, al-
lowing Dawn to maintain consistent brightness and
contrast across a range of lighting conditions. For
the nonlinear version, the constants are k
1
= 0.5 and
k
2
= 0.2, chosen to provide more aggressive scal-
ing in challenging lighting environments. The source
code for Dawn will be available at https://github.com/
birdortyedi/dawn-tmo/.
Looking ahead, local kernel-wise improvements,
such as those used in Storm, could be readily inte-
grated into Dawn to further enhance performance in
scenarios involving significant local brightness varia-
tions. These adjustments would allow for more local-
ized control of tone mapping, enhancing its ability to
handle highly complex lighting environments.
3 RESULTS AND DISCUSSION
The qualitative comparison in Figure 2 highlights
the performance of various TMOs in different chal-
Dawn: A Robust Tone Mapping Operator for Multi-Illuminant and Low-Light Scenarios
65
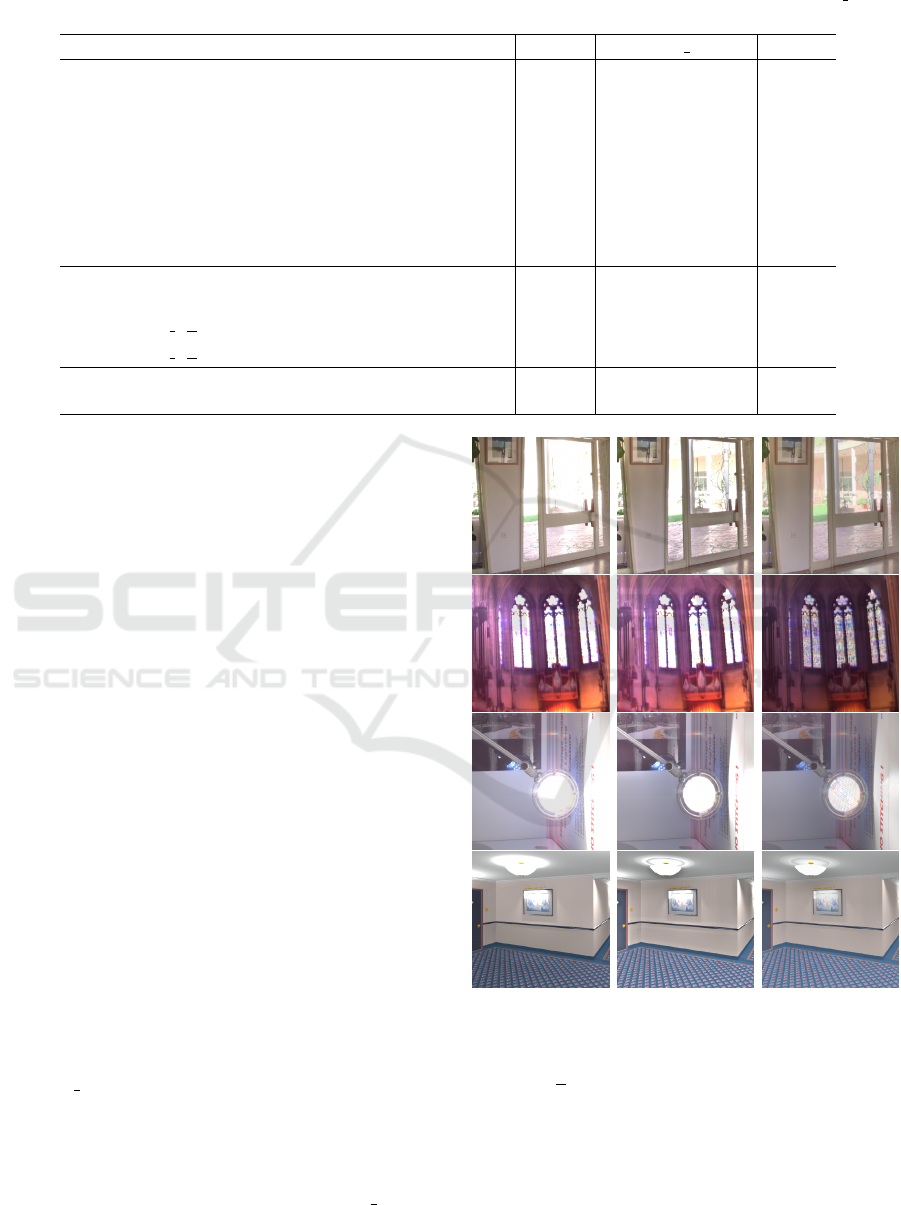
Table 1: Quantitative comparison on HDR dataset (Ward, 2015). Metrics used in this comparison: TMQI and FSITM
G
TMQI.
Cumulative computation times are also provided, which includes the metric computation.
TMO TMQI FSITM
G
TMQI t(s)
Ashikhmin (Debevec and Gibson, 2002) 0.6620 0.7338 225.23
Drago (Drago et al., 2003) 0.7719 0.8158 30.69
Durand (Durand and Dorsey, 2002) 0.8354 0.8405 225.14
Fattal (Fattal et al., 2023) 0.7198 0.7810 64.78
Mantiuk (Mantiuk et al., 2006) 0.8225 0.8266 88.03
Mantiuk (Mantiuk et al., 2008) 0.8443 0.8494 36.20
Pattanaik (Pattanaik et al., 2000) 0.6813 0.7635 46.91
Reinhard (Reinhard et al., 2023) 0.8695 0.8581 33.41
Reinhard (Reinhard and Devlin, 2005) 0.6968 0.7679 30.01
Flash
10
(Banic and Loncaric, 2018) 0.8072 0.8315 21.19
Flash
10
+Leap
110
(Banic and Loncaric, 2018) 0.8755 0.8625 21.26
Storm
20 - (1,
1
4
,
1
16
)
(Banic and Loncaric, 2018) 0.7675 0.8004 24.35
Storm
20 - (1,
1
4
,
1
16
)
+Leap
110
(Banic and Loncaric, 2018) 0.8782 0.8551 24.59
Dawn -linear (ours) 0.8654 0.8827 21.22
Dawn -nonlinear (ours) 0.8590 0.8795 21.11
lenging scenes. The performance of Dawn was as-
sessed using the HDR dataset provided in (Ward,
2015), which contains 33 HDR images. Drago and
Reinhard preserve midtones but struggle with high-
luminance regions, particularly in scenes like the
cathedral, where significant blooming and loss of de-
tail occur in bright areas. Flash improves highlight
handling but introduces artifacts due to its reliance
on static scaling and Leap, which flattens details in
bright regions, such as the desk lamp scene. Storm
mitigates some of these issues, but still suffers from
loss of highlight detail and local inconsistencies.
Dawn, however, consistently outperforms the
other methods, handling both low-light and high-
luminance regions effectively. Zoomed-in regions are
highlighted in Figure 3. For example, in the cathedral
scene, Dawn preserves detail in the bright windows
while maintaining contrast in shadow areas. The desk
lamp scene also shows balanced highlights without
the flattening seen in other operators. Using adap-
tive scaling and nonlinear adjustments, Dawn delivers
more natural, artifact-free images under various light-
ing conditions. Overall, Dawn demonstrates superior
robustness and consistency, particularly in challeng-
ing lighting environments, where other TMOs intro-
duce artifacts or lose critical details.
Table 1 shows the quantitative comparison of
TMOs based on TMQI (Yeganeh and Wang, 2012),
FSITM
G
TMQI (Nafchi et al., 2014). Dawn, for both
linear and nonlinear methods, delivers competitive
performance, with its image quality metrics closely
matching or surpassing other leading methods such
as Flash and Storm. In particular, the linear variant
of Dawn achieves one of the highest FSITM
G
TMQI
scores, indicating superior visual quality.
(a) Flash
10
+L
110
(b) Storm
20
+L
110
(c) Dawn (ours)
Figure 3: Zoomed-in regions from Figure 2, highlight-
ing the performance differences between Flash
10
+L
110
,
Storm
20-(..,
1
16
)
+L
110
, and Dawn.
In terms of efficiency, Dawn maintains low exe-
cution times comparable to the fastest TMOs such as
Flash. This balance of high-quality results and real-
time efficiency makes Dawn a strong candidate for
practical applications, particularly in environments
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
66
(a) Default (b) σ ↑ (c) µ ↑ σ ↓ (d) µ ↓ σ ↓
Figure 4: Influence of adjusting mean (µ) and variance (σ) on the output of Dawn with nonlinear scaling.
(a) Linear (b) Nonlinear
Figure 5: Comparison of tone mapping results using linear
and nonlinear scaling methods of Dawn in more challenging
lighting conditions.
that demand both performance and speed.
Figure 4 illustrates the impact of adjusting the lu-
minance mean (µ) and variance (σ) on Dawn, show-
casing how our optimized parameter choices affect
image quality. In (a), the default image serves as the
baseline. Increasing variance in (b) enhances local
contrast and detail visibility in high-dynamic regions,
such as stained glass. However, this comes at the cost
of slight noise amplification in shadow regions. In (c),
increasing the mean and decreasing the variance pro-
duce a brightening of the overall image, similar to the
default in terms of exposure, but at the cost of flatten-
ing some details in shadow regions. In (d), decreas-
ing both mean and variance results in an overexposed
image. These variations confirm that our selected pa-
rameters strike a balance, enhancing brightness and
contrast without sacrificing detail, demonstrating the
adaptability of Dawn to different lighting conditions.
Figure 5 introduces an example of linear and non-
linear scaling methods of Dawn under more chal-
lenging lighting conditions. This example mainly
highlights the effectiveness of the nonlinear scaling
approach, particularly in scenarios with rapid varia-
tions in brightness. The nonlinear approach demon-
strates improved handling of high-contrast areas, such
as stained glass in the scene, where it preserves
more details in the brightly lit regions. The linear
method, while effective, tends to flatten the contrast
slightly, resulting in less detail retention in these high-
luminance areas.
The different TMOs exhibit distinct performance
characteristics in extremely low-light scenarios, as
shown in Figure 6. Flash significantly brightens
the image, but introduces heavy noise, oversatura-
tion, and color shifts, particularly around the lamps,
which results in blown-out highlights and lost details.
While enhancing brightness, Storm introduces sub-
stantial noise and a strong red-yellow tint across the
image, overexposing the lamps and distorting the col-
ors. Next, Dawn with linear scaling offers a more bal-
anced approach compared to Flash and Storm, retain-
ing better color accuracy and reducing noise, though
some areas still appear overexposed and detail in
the shadows is limited. Finally, Dawn with nonlin-
ear scaling provides the best overall result, preserv-
ing natural colors, controlling noise, and maintaining
both highlight and shadow details without overexpo-
sure.
4 CONCLUSIONS
In this paper, we introduced Dawn, a novel tone map-
ping operator that builds upon the foundation of Flash
and Storm by incorporating an adaptive scaling mech-
anism based on image luminance statistics. Dawn
eliminates the need for post-processing corrections
like Leap, reducing artifacts and improving image
quality in low-light and multi-illuminant conditions.
Our results demonstrate that Dawn consistently out-
performs existing methods in terms of both image
Dawn: A Robust Tone Mapping Operator for Multi-Illuminant and Low-Light Scenarios
67

(a) Flash
10
+L
110
(b) Storm
20-(..,
1
16
)
+L
110
(c) Dawn -linear (ours) (d) Dawn -nonlinear (ours)
Figure 6: Comparison of Tone Mapping Operators (TMOs) under an extremely low-light scenario.
quality and computational efficiency, making it a ro-
bust solution for real-time tone mapping in diverse
lighting environments.
REFERENCES
Bani
´
c, N. and Lon
ˇ
cari
´
c, S. (2014). Improving the tone
mapping operators by using a redefined version of the
luminance channel. In Image and Signal Process-
ing: 6th International Conference, ICISP 2014, Cher-
bourg, France, June 30–July 2, 2014. Proceedings 6,
pages 392–399. Springer.
Bani
´
c, N. and Lon
ˇ
cari
´
c, S. (2016). Puma: A high-quality
retinex-based tone mapping operator. In 2016 24th
European Signal Processing Conference (EUSIPCO),
pages 943–947. IEEE.
Banic, N. and Loncaric, S. (2018). Flash and storm: Fast
and highly practical tone mapping based on naka-
rushton equation. In VISIGRAPP (4: VISAPP), pages
47–53.
Debevec, P. and Gibson, S. (2002). A tone mapping algo-
rithm for high contrast images. In 13th eurograph-
ics workshop on rendering: Pisa, Italy. Citeseer, vol-
ume 2.
Drago, F., Myszkowski, K., Annen, T., and Chiba, N.
(2003). Adaptive logarithmic mapping for displaying
high contrast scenes. In Computer graphics forum,
volume 22, pages 419–426. Wiley Online Library.
Durand, F. and Dorsey, J. (2002). Fast bilateral filtering for
the display of high-dynamic-range images. In Pro-
ceedings of the 29th annual conference on Computer
graphics and interactive techniques, pages 257–266.
Fattal, R., Lischinski, D., and Werman, M. (2023). Gradient
domain high dynamic range compression. In Seminal
Graphics Papers: Pushing the Boundaries, Volume 2,
pages 671–678.
Koschan, A. and Abidi, M. (2008). Digital color image
processing. John Wiley & Sons.
Larson, G. W., Rushmeier, H., and Piatko, C. (1997). A vis-
ibility matching tone reproduction operator for high
dynamic range scenes. IEEE Transactions on Visual-
ization and Computer Graphics, 3(4):291–306.
Mantiuk, R., Daly, S., and Kerofsky, L. (2008). Display
adaptive tone mapping. In ACM SIGGRAPH 2008 pa-
pers, pages 1–10.
Mantiuk, R., Myszkowski, K., and Seidel, H.-P. (2006). A
perceptual framework for contrast processing of high
dynamic range images. ACM Transactions on Applied
Perception (TAP), 3(3):286–308.
Nafchi, H. Z., Shahkolaei, A., Moghaddam, R. F., and
Cheriet, M. (2014). Fsitm: A feature similarity in-
dex for tone-mapped images. IEEE Signal Processing
Letters, 22(8):1026–1029.
Nguyen, R. M. and Brown, M. S. (2017). Why you should
forget luminance conversion and do something better.
In Proceedings of the ieee conference on computer vi-
sion and pattern recognition, pages 6750–6758.
Pattanaik, S. N., Tumblin, J., Yee, H., and Greenberg, D. P.
(2000). Time-dependent visual adaptation for fast re-
alistic image display. In Proceedings of the 27th an-
nual conference on Computer graphics and interac-
tive techniques, pages 47–54.
Reinhard, E. and Devlin, K. (2005). Dynamic range re-
duction inspired by photoreceptor physiology. IEEE
transactions on visualization and computer graphics,
11(1):13–24.
Reinhard, E., Stark, M., Shirley, P., and Ferwerda, J. (2023).
Photographic tone reproduction for digital images. In
Seminal Graphics Papers: Pushing the Boundaries,
Volume 2, pages 661–670.
Tumblin, J. and Rushmeier, H. (1993). Tone reproduction
for realistic images. IEEE Computer graphics and Ap-
plications, 13(6):42–48.
Ward, G. (2015). High dynamic range image examples.
Yeganeh, H. and Wang, Z. (2012). Objective quality assess-
ment of tone-mapped images. IEEE Transactions on
Image processing, 22(2):657–667.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
68
