
A Two-Stage Extended Kalman Filter-Based Approach Against FDI
Cyber-Attack in Intelligent and Connected Vehicles
Bin Sun
1 a
, Shichun Yang
1 b
, Yu Wang
1
, Jiayi Lu
1
and Yaoguang Cao
1,2 c
1
School of Transportation Science and Engineering, Beihang University, Beijing, China
2
State Key Lab of Intelligent Transportation System, Beihang University, Beijing, China
Keywords:
Cybersecurity, False Data Injection, Two-Stage Extended Kalman Filter, Intelligent and Connected Vehicles.
Abstract:
With the widespread integration of artificial intelligence and telecommunication technologies in vehicles, the
challenge of cybersecurity in Intelligent and Connected Vehicles (ICVs) has gained significant attention. A
typical and high-risk cyber-attack technique involves False Data Injection (FDI) into sensors through the net-
work, resulting in deviations in subsequent planning and control algorithm outcomes. Existing approaches
suffer from limited robustness, being suitable only for simple models or requiring extensive data for the train-
ing model, which limits their practicality. Therefore, this paper proposes a method based on a Two-stage
Extended Kalman Filter (TSEKF), which not only detects cyber-attacks but also restores the vehicle’s true
motion state, thereby enhancing the robustness of vehicle ego state perception. The experimental results
demonstrate that the proposed method exhibits strong performance across various motion scenarios, offering
an effective solution for the safe operation of ICVs.
1 INTRODUCTION
Intelligent and Connected Vehicles (ICVs) are a fu-
ture trend, integrating advanced technologies and im-
proving travel efficiency, but also introducing security
risks due to external information exchange. Protect-
ing vehicle sensors from cyber-attacks is essential for
safe operation(Mwanje et al., 2024).Common cyber
attacks include FDI, DRA, and DoS. FDI is the most
typical, injecting false data into vehicle sensors, lead-
ing to inaccurate algorithms and potential safety risks
(Ju et al., 2022). This paper focuses on detecting FDI
attacks.
Cyber-attack detection for ICVs can be classi-
fied into three main categories. The first category is
model-based attack detection methods, which design
an observer based on the vehicle’s dynamic model,
assuming that modeling and measurement uncertain-
ties have upper bounds. An attack is detected when
the measurement innovation exceeds a threshold. The
work in (He et al., 2021) focuses on sensor attack de-
tection using a saturation-like observer. The meth-
ods proposed in (Dutta et al., 2018), and (Abdol-
a
https://orcid.org/0009-0008-4998-0974
b
https://orcid.org/0000-0003-3426-7988
c
https://orcid.org/0000-0002-6107-2425
lahi Biron et al., 2016) utilize a sliding mode observer
for attack detection, characterized by a simple design
process and some robustness to modeling uncertain-
ties. However, observer-based methods are primarily
suited for deterministic system models, offering sim-
plicity but limited performance under imperfect com-
munication.The second category involves attack de-
tection based on machine learning techniques. These
methods utilize machine learning to achieve attack
detection. In (Ju et al., 2020), Support Vector Ma-
chines (SVM) is employed to detect speed and posi-
tion sensor attacks during vehicle following. Hsiao-
Chung Lin et al. developed an Atta detection model
using a pre-trained VGG16 deep learning classifier
to learn attack behavior features and classify threats
(Lin et al., 2022). Several scholars (Hossain et al.,
2020), (Lokman et al., 2019), (Han et al., 2018),
(Javed et al., 2021) have used foundational classifiers
to detect anomalies in CAN messages, such as De-
cision Trees, Logistic Regression and Support Vec-
tor Classifiers. Wei Lo et al. implemented a hybrid
network combining Convolutional Neural Networks
(CNN) and Long Short-Term Memory networks to
automatically extract spatial and temporal features
from vehicular network traffic for attack detection (Lo
et al., 2022). However, machine learning-based de-
tection faces two major challenges: the inability to
Sun, B., Yang, S., Wang, Y., Lu, J. and Cao, Y.
A Two-Stage Extended Kalman Filter-Based Approach Against FDI Cyber-Attack in Intelligent and Connected Vehicles.
DOI: 10.5220/0013137900003941
In Proceedings of the 11th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2025), pages 301-308
ISBN: 978-989-758-745-0; ISSN: 2184-495X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
301
quantify cyber-attacks and potential significant per-
formance degradation in the presence of measurement
noise. Additionally, effective detection and mitigation
of cyber-attacks require substantial amounts of real
data, which involves considerable effort in data col-
lection and labeling. The last category is hybrid meth-
ods that integrate model-based approaches with arti-
ficial intelligence. The literature (Wang et al., 2020)
presents a method that cascades CNN with a χ
2
de-
tector, where CNN first detects and removes anoma-
lous sensor data, followed by the χ
2
detector to iden-
tify undetected anomalies. Although this approach
shows performance improvements, the detection re-
sults rely heavily on CNN training. Guo et al. de-
signed a machine learning method that combines bat-
tery dynamics and vehicle kinematic models to de-
tect cyber-attacks on electric vehicles in various driv-
ing scenarios (Guo et al., 2021). Linxi Zhang et
al. merge traditional rule-based intrusion detection
techniques with emerging machine learning methods,
striking a balance between detection accuracy and ef-
ficiency (Zhang and Ma, 2022). Although each of the
three aforementioned methods has its strengths and
weaknesses in attack detection, they all primarily em-
phasize anomaly detection in the data, neglecting the
estimation of the vehicle’s true state.
The Kalman filter helps estimate vehicle states in
noisy settings. However, it struggles with inaccurate
models or biased sensor data. The Two-stage Kalman
Filter (TSKF) was initially proposed to addresses ran-
dom biases (Keller and Darouach, 1997). This pa-
per introduces a Two-stage Extended Kalman Filter
(TSEKF) for nonlinear systems to detect and mitigate
cyber-attacks in ICVs. It identifies cyber-attacks and
estimates vehicle states via a dual-stage process. The
performance of the method is validated for different
vehicle motions.
The remainder of the paper is organized as fol-
lows. Section II introduces the vehicle dynamics
modeling. Section III discusses the modeling of
cyber-attacks and the detection methods using the
TSEKF algorithm. Section IV describes the experi-
ment results of the TSEKF in various motion states.
Finally, Section VI summarizes the entire paper.
2 VEHICLE DYNAMICS
In the extened Kalman Filter prediction step, a twin-
track model is utilized to model the lateral and lon-
gitudinal vehicle dynamics, thereby enhancing the
precision of vehicle state estimation (Henning and
Sawodny, 2016). The model consists of a nonlinear
dynamic state equation combined with a linear output
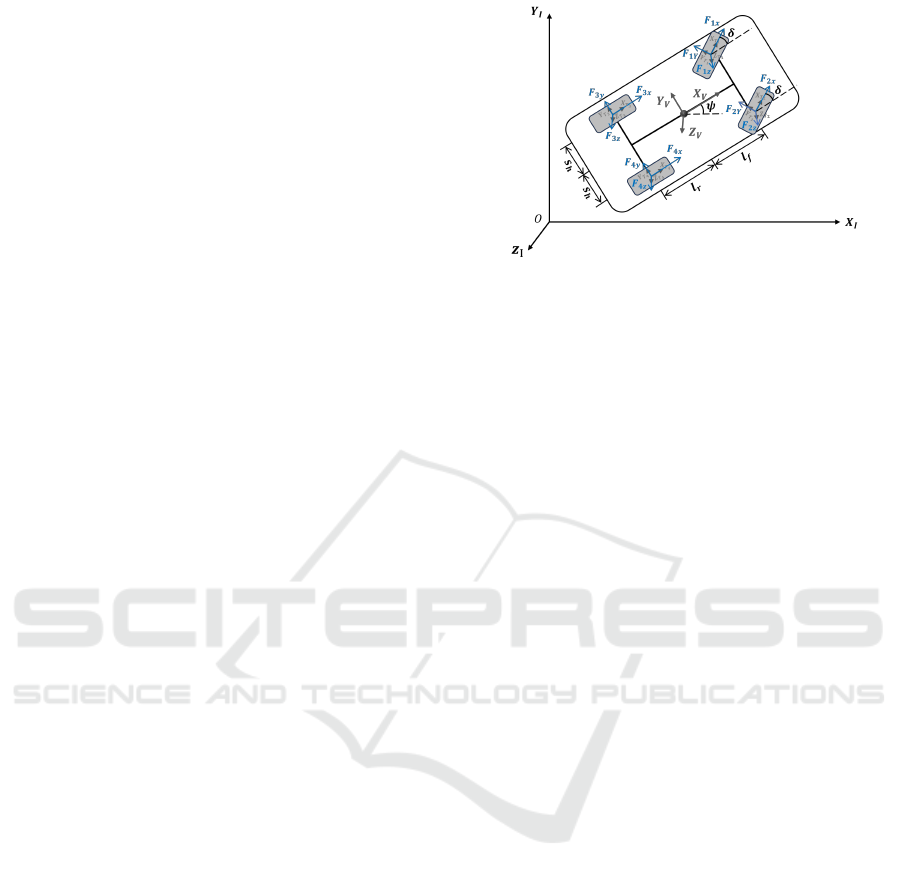
Figure 1: Double-track model of vehicle lateral dynamic
modal.
equation:
˙x = r(x, u), x(0) = x
0
y = Cx + F
y
(x) f
. (1)
The state vector of the dynamic equations is:
x = [
v
x,V
v
y,V
˙
ψ
V
a
x,I
a
y,I
]
T
, (2)
with longitudinal velocity v
y,V
, lateral velocity v
x,V
,
yaw rate
˙
ψ
V
, longitudinal acceleration a
x,I
and lateral
acceleration a
y,I
.The subscript for the state variables
indicates the reference coordinate system for mea-
surements: I for the inertial coordinate system, V for
the vehicle coordinate system, and T
i
for the tire co-
ordinate system. The tire numbering is as follows: 1
for the left front, 2 for the right front, 3 for the left
rear, and 4 for the right rear. The coordinate system is
shown in 1.
The control input vector of the model of the dy-
namic equations is:
u =
δ T
b1,T
1
T
b2,T
2
T
b3,T
3
T
b4,T
4
T
d1,T
1
T
d2,T
2
T
d3,T
3
T
d4,T
4
, (3)
with the front steering angle δ, the barking moment
T
bi,T
i
and driving moment T
di,T
i
of four wheels.
2.1 Non-Linear Tier Model
The torque balance equations for the four wheels are
as follows:
θ
tw
·
˙
ω
i,T
i
= −r
(tire)
· F
ix,V
− T
bi,T
i
+ T
di,T
i
, (4)
where θ
tw
is the moment of inertia of an individual
tire around its rotational axis, r
(tire)
is the tire radius,
and F
xi,V
is the longitudinal ground force acting on the
tire in the vehicle driving direction.
The tire model used in this study is a simplified
version of the Magic Formula Tire (MFT) model (Di-
eter et al., 2018), based on the MFT 5.2 model pro-
posed by Pacejka (Pacejka, 2012), and includes a
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
302

complete set of parameters. The fundamental equa-
tions are as follows:
F
i,V
= F
i(max)
sin(C arctan(B
∥
s
i
∥
µ
))
k
x
0
0 1
s
i
∥
s
i
∥
F
i(max)
= DµF
iz
(1 + k
F
z
F
Z0
−F
iz
F
Z0
).
(5)
The parameters B,C, D,k
x
and k
F
z
represent the
initial slope, saturation shape, peak tire force, longitu-
dinal scaling factor, and tire load coefficient, respec-
tively. These parameters describe the characteristic
relationship curve between slip and tire force, but do
not have physical units. The maximum transferable
force F
i(max)
increases with tire load F
iz
, which can be
calculated as in reference (Dieter et al., 2018). How-
ever, as the load continues to increase, the rate of in-
crease of the maximum force gradually decreases, a
relationship determined by the coefficient k
F
z
(Best,
2014).
The inputs for the tire model (5) are the longitudi-
nal slip k
i
and the lateral slip angle α
i
. For each tire,
these are represented as:
s
i
=
k
i
α
i
. (6)
The longitudinal slip k
i
is calculated as:
k
i
=
r
tire
ω
i,T
i
− v
xi,T
i
v
xi,T
i
. (7)
The side slip angle α
i
is defined by
α
i
=
δ − arctan
v
y,V
+l
f
˙
ψ
V
v
x,V
−s
h
˙
ψ
V
,i = 1
δ − arctan
v
y,V
+l
f
˙
ψ
V
v
x,V
+s
h
˙
ψ
V
,i = 2
−arctan
v
y,V
−l
r
˙
ψ
V
v
x,V
−s
h
˙
ψ
V
,i = 3
−arctan
v
y,V
−l
r
˙
ψ
V
v
x,V
+s
h
˙
ψ
V
,i = 4
. (8)
As shown in Figure 1, l
f
and l
r
represent the dis-
tances from the vehicle’s center of gravity to the front
and rear axles, respectively, s
h
is half of the vehicle’s
width.
2.2 Vehicle Dynamic Model
The general equation for the horizontal motion of a
vehicle can be expressed as follows:
˙v
x,V
=
1
m
4
∑
i=1
F
ix,V
+
˙
ψ
V
v
y,V
˙v
y,V
=
1
m
4
∑
i=1
F
iy,V
−
˙
ψ
V
v
x,V
¨
ψ
V
=
1
θ
zz
4
∑
i=1
M
iz,V
.
(9)
All kinetic quantities, tire forces, and moments are
illustrated in Figure 1. In equation (9), m represents
the vehicle’s mass, θ
zz
denotes the moment of inertia
of the entire vehicle about the z axis, while F
ix,V
and
F
iy,V
are the horizontal components of the respective
tire forces in the x or y direction. M
iz,V
represents the
moments generated by these forces around the vehi-
cle’s center of gravity (COG).
It is important to note that the additional trans-
lational acceleration caused by the rotating reference
frame has been accounted for in equation (10), but the
accelerations in inertial coordinates are calculated as:
a
x,I
=
1
m
4
∑
i=1
F
ix,V
a
y,I
=
1
m
4
∑
i=1
F
iy,V
, (10)
The complete model is derived by combining
equations (9) with a nonlinear tire model (5),
f (x,u) =
1
m
4
∑
i=1
F
ix,V
+
˙
ψ
V
v
y,V
1
m
4
∑
i=1
F
iy,V
−
˙
ψ
V
v
x,V
1
θ
zz
4
∑
i=1
M
iz,V
1
∆t
1
m
4
∑
i=1
F
ix,V
− a
x(∆t),I
1
∆t
1
m
4
∑
i=1
F
iy,V
− a
y(∆t),I
. (11)
The parameters used in the vehicle dynamic
model and MFT tire model proposed in this study
are listed in Table 1. These parameters were obtained
from the open database of the simulation software.
3 CYBER-ATTACK MODELING
AND TSEKF-BASED
APPROACH
The nonlinear vehicle dynamics model established
in Chapter 2 can be discretized using the 4th-order
Runge-Kutta method:
x
k
= f
d
(x
k−1
,u
k−1
) + w
k−1
y
k
= Cx
k
+ v
k
, (12)
with the state vector x
k
∈ R
n
, control input u
k
∈ R
m
,
and observation vector y
k
∈ R
p
. Here, w
k
∈ R
p
, w
k
∼
N (0,Q) and v
k
∈ R
p
, v
k
∼ N (0,R) denote process
and measurement noise, respectively, both of which
are assumed to follow a normal distribution with a
mean of zero. The covariance matrices Q and R rep-
resent the process noise and measurement noise co-
variance, respectively. Sensor noise captures the ran-
dom uncertainty present during the measurement pro-
cess. Process noise reflects external influences, such
A Two-Stage Extended Kalman Filter-Based Approach Against FDI Cyber-Attack in Intelligent and Connected Vehicles
303
Table 1: Modelling Parameters.
Symbol Description Value Unit
µ Friction coefficient
of road surface
0.8 -
F
z0
Nominal tire load 5150 N
k
x
Longitudinal scaling
factor
1.1743 -
k
Fz
Degenerative tire
load factor
0.1342 -
B Initial slope parame-
ter
10.4962 -
C Shape factor for satu-
ration region
1.5402 -
D Influences maximum
tire force peak
1.1006 -
m Vehicle mass 2100 kg
θ
zz
Moment of inertia for
Vehicle
2549 kg · m
2
θ
tw
Moment of inertia for
tires
2.1 kg · m
2
l
f
Distance cog to front 1.27 m
l
r
Distance cog to rear 1.37 m
r
tire
tire radius 0.34 m
s
h
Half track-width 0.81 m
g gravitational acceler-
ation constant
9.81 m/s
2
as wind force and road surface irregularities. Addi-
tionally, internal non-parametric input uncertainties,
such as actuator delays, are neglected; we assume that
the response of actuators, like steering, is rapid. Sim-
ilar uncertainties for other parameters are also disre-
garded.
In equation (13), the state observation matrix C is
chosen as follows:
C =
1 0 0 0 0
0 1 0 0 0
0 0 1 0 0
0
0
0
0
0
0
1
0
0
1
. (13)
3.1 Cyberthreat Modelling
FDI is one of the most prevalent forms of cyber-
attacks, where attackers, unaware of system param-
eters or previous event data, directly introduce er-
roneous information into the original data. This
manipulation can result in significant discrepancies
in speed, acceleration, and other critical parame-
ters, leading downstream decision-making processes
to rely on incorrect motion states for path planning.
Consequently, the safety constraints derived from
these decisions are based on flawed states, rendering
them ineffective and posing substantial safety risks of
ICVs. FDI attack can be modeled as follows (Tan
et al., 2017):
y
k
=
Cx
k
+ v
k
Cx
k
+ F
y
b
k
+ v
k
k < τ
k ≥ τ
. (14)
Here, the subscript k indicates the value at a given
discrete time k; b represents the bias/attack vector
added to the measurements; F denotes the observa-
tion matrix of the attack vector, illustrating how b in-
fluences the system’s observations; and τ is the mo-
ment when the attack is activated.
Thus, considering the cyber-attack, the dynamics
described by equation (13) can be updated to
x
k
= f
d
(x
k−1
,u
k−1
) + w
k−1
y
k
= Cx
k
+ F · b
k
+ v
k
, (15)
with cyber threat b
k
∈ R
nb
.
We assume that the cyber-attack is stationary dur-
ing the attack duration and can be modeled as a Gaus-
sian random process
b
k+1
= b
k
+ w
f ,k
, (16)
where w
b,k
∈ R
n
b
, w
b,k
∼ N (0,Q
b
) represents the un-
certainty of the attack magnitude.
For cyber-attacks, this paper considers FDI in the
form of erroneous data in longitudinal velocity, lat-
eral velocity, yaw rate, longitudinal acceleration, and
lateral acceleration, specifically:
b =
b
v
x
b
v
y
b
˙
ψ
b
a
x
b
a
y
T
. (17)
The output matrix of the attack is related to the state
variables, specifically as follows:
F
y
(x) =
0 0 0
1 0 0
0 1 0
0 0 1
. (18)
The measurement output when b = 0 is:
y = [
v
x,V
v
y,V
˙
ψ
V
a
x(∆t),I
a
y(∆t),I
]
T
. (19)
3.2 Two-Stage Extended Kalman Filter
By dividing state estimation and attack estimation
into two stages, the TSEKF effectively reduces
the computational complexity associated with high-
dimensional parameters. The first stage focuses on
estimating the true state of the vehicle’s motion, while
the second stage concentrates on estimating the mag-
nitude of the cyber-attack. Consequently, the first
stage can be redesigned based on different vehicle
model parameters, and the second stage can be opti-
mized to reduce false positive rates and shorten attack
detection times. These two stages operate relatively
independently, with no mutual interference, making
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
304
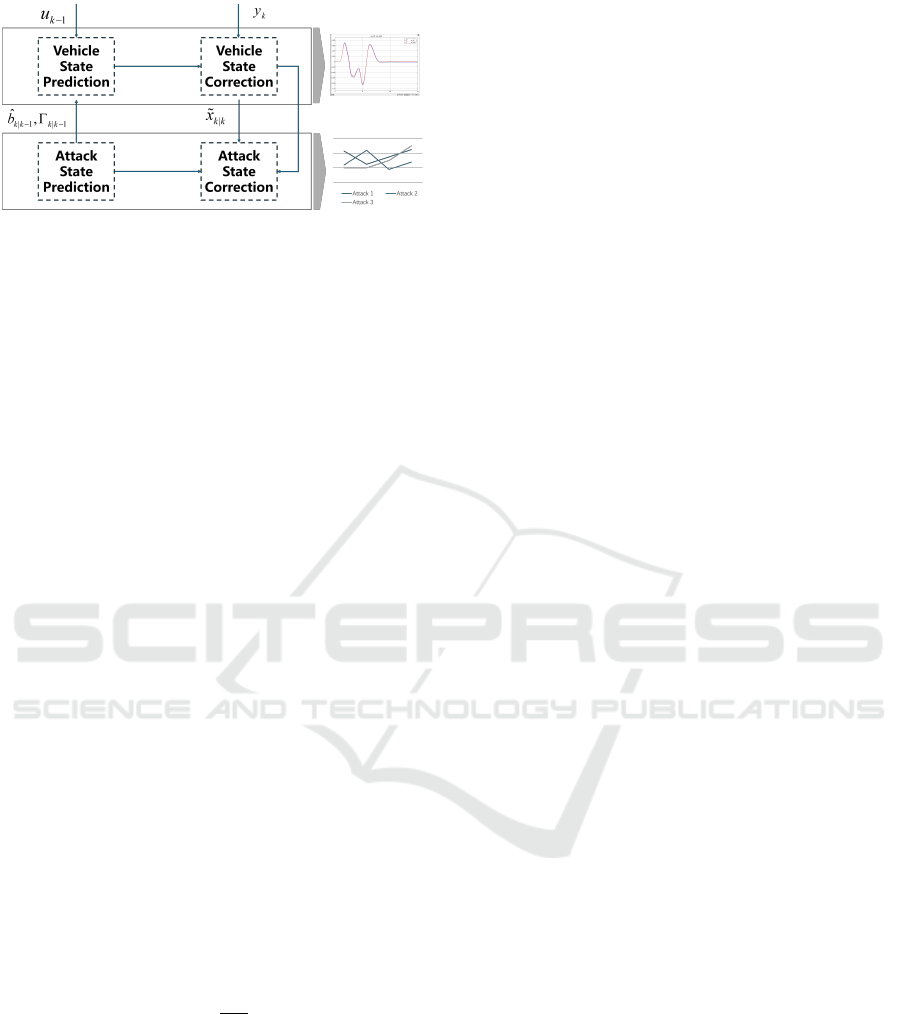
Figure 2: The proposed TSEKF algorithm.
the algorithm particularly well-suited for application
in the field of intelligent and connected vehicles.
The overall framework of the algorithm is illus-
trated in Figure 2. In the first stage of vehicle motion
state prediction, the inputs u
k
, the attack prior esti-
mate
ˆ
b
k|k−1
, and state transformation Γ
k|k−1
are used
to predict the state. Then, the measurement values y
k
are utilized to compute the corrected motion state esti-
mate. This corrected state estimate
ˆ
x
k+1|k+1
is subse-
quently used in the second stage for detecting cyber-
attacks, yielding a corrected attack estimate
ˆ
b
k|k
, that
serves as the prior estimate for the next iteration. The
prediction of cyber-attack detection
ˆ
b
k|k−1
leverages
the prior estimate of the attack and determines the
next state transition Γ
k|k−1
.
The subscript k|k − 1 indicates that at time step k,
measurements up to time step k−1 are used. Utilizing
the nonlinear motion equations (13) and combining
them with the current cyber-attack estimate, the prior
state is predicted for the vehicle’s motion state:
ˆx
k|k−1
= f
d
( ˆx
k−1|k−1
,u
k−1
,
b
b
k−1|k−1
). (20)
The prior estimate of the cyber-attack is computed
based on the assumed stationary characteristics of the
cyber-attack:
ˆ
b
k|k−1
=
ˆ
b
k−1|k−1
. (21)
According to the principles of the Extended
Kalman Filter (EKF), the approximate linearized state
transition Jacobian matrix for the nonlinear system is
obtained through numerical computation using finite
difference methods:
A
k
=
∂ f
d
∂x
. (22)
According to equation (23), the self-covariance of
the vehicle motion state estimation error is calculated
as follows:
P
xx,k+1|k
= A
k
P
xx,k|k
A
T
k
+ Q. (23)
The self-covariance of the estimation error for the
cyber-attack, based on equation (22) and the uncer-
tainty of the cyber-attack process, is given by the fol-
lowing result:
P
bb,k+1|k
= P
f f ,k|k
+ Q
f
. (24)
The state and attack cross-covariance matrix can
be computed using the state transition matrix and the
static assumption of the cyber-attack, resulting in:
P
xb,k+1|k
= A
k
P
xb,k|k
. (25)
To eliminate the cross-covariance from equation
(26), the state transformation should be processed as
follows:
e
x
k|k−1
˜
b
k|k−1
=
I
n
−Γ
k|k−1
0 I
b
ˆx
k|k−1
ˆ
b
k|k−1
=
ˆx
k|k−1
− Γ
k|k−1
ˆ
f
k|k−1
˜
b
k|k−1
. (26)
By applying the state transformation, the two
phases of the EKF can be effectively separated. The
new system state
˜
x is a linear combination of the sys-
tem state and the attack state, while the attack estima-
tion state
˜
b =
ˆ
b remains unchanged. Here, I
n
and I
b
are appropriately dimensioned identity matrices. Ac-
cording to reference (May et al., 2023), it can be ex-
pressed in an iterative calculation as a form indepen-
dent of the cross-covariance:
Γ
k|k−1
= A
k−1
Γ
k−1|k−1
P
bb,k−1|k−1
P
−1
bb,k|k−1
. (27)
When the measurement value is y
k
obtained, the
corrected kinematic state estimate is given by:
˜x
k|k
= ˜x
k|k−1
+ K
˜x,k
(y
k
− F
y,k
ˆ
b
k|k−1
−C
k+1
ˆx
k+1|k
),
(28)
with Kalman gain for state estimate K
˜x,k
, and calcu-
lated by
K
˜x,k
= P
˜x,k|k−1
C
T
k
S
−1
˜x,k
. (29)
Similar to the classic EKF algorithm, in equation
(31), S
˜x,k
represents the covariance of the observation
error
S
˜x,k
= C
k
P
˜x,k|k−1
C
T
k
+ R. (30)
The posterior estimate of the cyber-attack is given
by:
ˆ
b
k|k−1
=
ˆ
b
k|k−1
+ K
b,k
(v
k
− F
y,k
ˆ
b
k|k−1
), (31)
with
v
k
= y
k
−C
k
( ˜x
k|k−1
+ Γ
k|k−1
ˆ
b
k|k−1
). (32)
Similarly, the Kalman gain for attack estimate K
b,k
is
K
b,k
= P
bb,k|k−1
S
−1
f ,k+1
, (33)
where β
k
and S
f ,k+1
are calculated as follows:
β
k
= F
y,k
+C
k
γ
k|k−1
(34)
S
f ,k+1
= β
k+1
P
f f ,k+1|k
β
T
k+1
+ S
x,y,k+1
. (35)
Finally, the error covariance for the next time step
is updated using the following calculation:
P
˜x ˜x,k|k
= (I − K
˜x ˜x,y,k
C
k
)P
˜x ˜x,k|k−1
(36)
P
bb,k|k
= (I − K
f ,k
β
k
)P
bb,k|k−1
. (37)
A Two-Stage Extended Kalman Filter-Based Approach Against FDI Cyber-Attack in Intelligent and Connected Vehicles
305

4 EXPERIMENT RESULTS AND
DISCUSSION
Various driving maneuvers were constructed in the
simulation environment, including linear drive and
circular drive, to simulate vehicle dynamics in single-
directional movement, as well as coupled lateral and
longitudinal movements. Different types of data in-
jection attacks were designed to evaluate the perfor-
mance of the proposed TSEFK algorithm. The covari-
ance of process noise Q, measurement noise R, and
attack noise Q
b
was configured as diagonal matrices,
with the value of diagonal elements set as 3 × 10
−4
,
1 × 10
−5
and 2 × 10
−3
, respectively.
4.1 Linear Drive
Two driving maneuvers, with constant speed and ac-
celeration, were designed to test the algorithm per-
formance under cyber-attacks targeting longitudinal
speed and longitudinal acceleration, respectively.
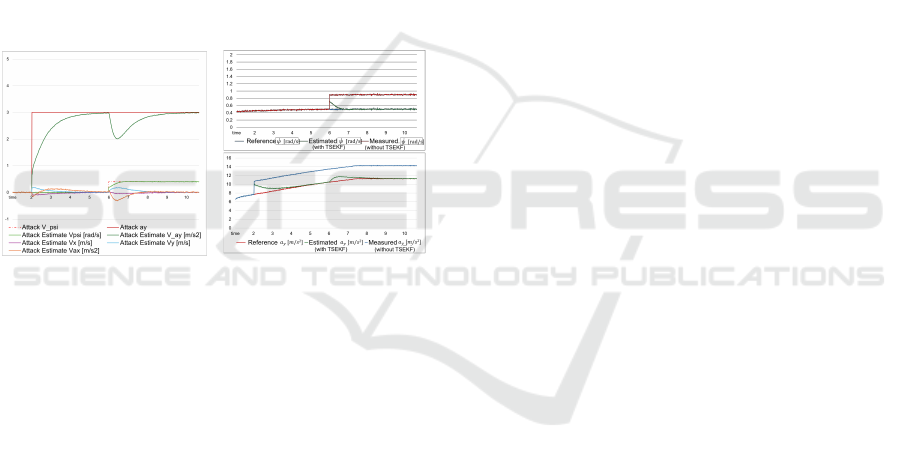
(a) Cyber-attack Estimate (b) Vehicle State
Figure 3: Linear Drive.
For the constant-speed scenario, the vehicle speed
was set at 50 km/h (≈ 16m/s), , reflecting typical ur-
ban traffic. At t = 1s, an FDI attack was initiated on
the longitudinal speed of the vehicle, with the attack
magnitude b
v
x
= 4(m/s). Figure (3a) illustrates the al-
gorithm estimation of cyber-attack magnitude. When
the cyber-attack (solid red line) occurs, the proposed
algorithm immediately detects it, with the estimated
attack magnitude on longitudinal speed (solid green
line) converging to the actual attack value within ap-
proximately 1 second. However, it should be noted
that when the cyber-attack is initiated, there is signif-
icant fluctuation in the estimated attack magnitudes
for both longitudinal and lateral acceleration. This is
because acceleration is the derivative of speed; thus,
any substantial deviation in speed measurements may
not only reflect direct attacks on speed, but may also
indicate an attack in acceleration. Over time, the esti-
mated values for acceleration converge toward zero.
Figure (3b) presents the actual state, the measured
state (without TSEFK), and the estimated state gen-
erated by the proposed algorithm (with TSEFK). Fol-
lowing a cyber-attack, the measured value displays an
immediate deviation. Although the estimated value
increases slightly, they rapidly reduce and converge
to the actual state within approximately 1 second.
(a) Cyber-attack Estimate (b) Vehicle State
Figure 4: Linear Accelerated Drive.
For the acceleration scenario, the vehicle speed
was also set at 50 km/h (≈ 16m/s), while an FDI
attack was initiated in the longitudinal acceleration,
with the attack magnitude b
a
x
= 2(m/s
2
). The attack
can be detected immediately and its magnitude sta-
bilizes within 1 second. Unlike in Figure (3a), the
estimated attack magnitudes for other variables re-
main close to zero. As explained previously, accelera-
tion is the derivative of other variables and determines
their rate of change. Therefore, when acceleration is
attacked, it exhibits a deviation independently, unaf-
fected by deviations in other variables. In Figure (4b),
the vehicle estimated state return to the actual state af-
ter a slight increase.
4.2 Circular Drive
We used the circular motion to test the algorithm’s
evaluation of the vehicle’s lateral motion state indi-
cators, with the steering angle fixed at 0.1 rad and
the vehicle speed set to the previously mentioned
50km/h. At t = 0.7s, a FDI attack was initiated at the
(a) Cyber-attack Estimate (b) Vehicle State
Figure 5: Circular Drive.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
306
lateral speed. Similarly to the linear constant speed
scenario, Figure (5a) shows that following the attack
(solid red line) at the lateral speed, the corresponding
estimated attack value (solid green line) rises swiftly
and converges to the actual attack magnitude within
approximately 1 second. Similarly, an attack on lat-
eral speed causes fluctuations in the estimated attack
value for acceleration, but these ultimately converge
to zero around 2 seconds. In Figure (5b), the algo-
rithm’s estimated values experience a slight increase
before converging to the actual lateral speed.
To further validate the algorithm’s performance
under combined motion conditions, we introduced an
acceleration scenario to the constant-speed circular
motion. The steering angle was kept constant at 0.1
rad, while the vehicle speed increased uniformly from
50km/h to 70km/h. At t = 2s, an FDI attack with
b
a
y
= 3(m/s) was initiated in the lateral acceleration,
followed by another FDI attack with b
˙
ψ
= 0.4(rad/s)
on the yaw rate at t = 6s.
(a) Cyber-attack Estimate (b) Vehicle State
Figure 6: Circular Accelerated Drive.
In Figure(6a), when only a lateral acceleration at-
tack is applied (solid red line), similar to the longitu-
dinal acceleration attack, the attack magnitude is ef-
fectively tracked. This causes only minor fluctuations
in the estimated attack values for other variables. The
actual lateral acceleration of the vehicle, in the ab-
sence of attack, is also accurately estimated. How-
ever, when a cyber-attack is applied to the yaw rate
(dashed red line), it induces a change in the estimated
attack values not only for yaw rate but also for ac-
celeration. This occurs because lateral acceleration
is one of the factors causing yaw rate change; thus,
when the yaw rate deviates due to a cyber-attack, the
algorithm may also infer that lateral acceleration has
been attacked, resulting in a perceived shift. However,
over time, the estimated value for the lateral accelera-
tion attack converges to its actual value. This fluctua-
tion also affects the vehicle state estimation, as shown
in Figure (6b): for the acceleration state estimation,
there is a noticeable deviation from the vehicle’s true
state between 6 and 7 seconds, though this deviation
remains much smaller than that of the direct measure-
ment. For the yaw rate state estimation, after a slight
increase, it swiftly converges to the vehicle’s actual
state.
In summary, the TSEKF algorithm effectively de-
tects cyber-attack magnitudes and estimates vehicle
state within 1–2 seconds under various driving con-
ditions. It performs better in estimating attacks and
states when targeting acceleration, though attacks on
speed-related variables cause some fluctuations in the
acceleration estimates. Despite this, the estimated
values remain significantly closer to the true state
compared to direct measurements without TSEKF.
5 CONCLUSION
In this paper, we propose a TSEKF-based cyberse-
curity approach to address FDI attacks in ICVs. By
separating state and attack estimation into two stages,
the method reduces computational complexity while
achieving accurate state estimation and attack detec-
tion across various vehicle states. The experimen-
tal results demonstrate strong stability and robustness
against FDI attacks under different driving conditions.
In the first stage, the algorithm accurately estimates
vehicle motion states despite attacks, while in the
second stage it effectively detects and estimates sen-
sor data deviations, providing robust protection. This
research expands the application of Kalman filters
in ICV security and lays a foundation for advanced
cyber-attack protection mechanisms.
In summary, the proposed method offers a promis-
ing solution to ensure the safety of ICV and counter
cyber threats. Future work could explore the integra-
tion of additional attack patterns and multisensor fu-
sion techniques to enhance protection in complex sce-
narios.
ACKNOWLEDGEMENTS
This work is supported by National Key R&D
Program of China (Grant No.2023YFB3107400),
National Key R&D Program of China (Grant
No.2022YFB2503300) and the National Natural Sci-
ence Foundation of China (No. U22A202101).
REFERENCES
Abdollahi Biron, Z., Dey, S., and Pisu, P. (2016). Sen-
sor fault diagnosis of connected vehicles under im-
perfect communication network. In Dynamic Sys-
A Two-Stage Extended Kalman Filter-Based Approach Against FDI Cyber-Attack in Intelligent and Connected Vehicles
307

tems and Control Conference, volume 50695, page
V001T16A003. American Society of Mechanical En-
gineers.
Best, M. C. (2014). A new empirical ‘exponential’ tyre
model. International Journal of Vehicle Design. Pub-
lisher: Inderscience Publishers Ltd.
Dieter, S., Manfred, H., and Roberto, B. (2018). Vehicle
dynamics: modeling and simulation.
Dutta, R. G., Yu, F., Zhang, T., Hu, Y., and Jin, Y. (2018).
Security for Safety: A Path Toward Building Trusted
Autonomous Vehicles. In 2018 IEEE/ACM Interna-
tional Conference on Computer-Aided Design (IC-
CAD), pages 1–6. ISSN: 1558-2434.
Guo, L., Ye, J., and Yang, B. (2021). Cyberattack Detection
for Electric Vehicles Using Physics-Guided Machine
Learning. IEEE Transactions on Transportation Elec-
trification, 7(3):2010–2022.
Han, M. L., Kwak, B. I., and Kim, H. K. (2018). Anomaly
intrusion detection method for vehicular networks
based on survival analysis. Vehicular Communica-
tions, 14:52–63.
He, X., Hashemi, E., and Johansson, K. H. (2021). Dis-
tributed control under compromised measurements:
Resilient estimation, attack detection, and vehicle pla-
tooning. Automatica, 134:109953.
Henning, K.-U. and Sawodny, O. (2016). Vehicle dynamics
modelling and validation for online applications and
controller synthesis. Mechatronics, 39:113–126.
Hossain, M. D., Inoue, H., Ochiai, H., Fall, D., and
Kadobayashi, Y. (2020). LSTM-Based Intrusion De-
tection System for In-Vehicle Can Bus Communica-
tions. IEEE access : practical innovations, open solu-
tions, 8:185489–185502.
Javed, A. R., ur Rehman, S., Khan, M. U., Alazab, M.,
and G, T. R. (2021). CANintelliIDS: Detecting In-
Vehicle Intrusion Attacks on a Controller Area Net-
work Using CNN and Attention-Based GRU. IEEE
Transactions on Network Science and Engineering,
8(2):1456–1466.
Ju, Z., Zhang, H., Li, X., Chen, X., Han, J., and Yang, M.
(2022). A Survey on Attack Detection and Resilience
for Connected and Automated Vehicles: From Vehi-
cle Dynamics and Control Perspective. IEEE Trans-
actions on Intelligent Vehicles, 7(4):815–837.
Ju, Z., Zhang, H., and Tan, Y. (2020). Distributed Deception
Attack Detection in Platoon-Based Connected Vehicle
Systems. IEEE Transactions on Vehicular Technol-
ogy, 69(5):4609–4620.
Keller, J.-Y. and Darouach, M. (1997). Optimal two-stage
Kalman filter in the presence of random bias. Auto-
matica, 33(9):1745–1748. Publisher: Elsevier.
Lin, H.-C., Wang, P., Chao, K.-M., Lin, W.-H., and Chen,
J.-H. (2022). Using Deep Learning Networks to
Identify Cyber Attacks on Intrusion Detection for In-
Vehicle Networks. Electronics, 11(14):2180. Pub-
lisher: Multidisciplinary Digital Publishing Institute.
Lo, W., Alqahtani, H., Thakur, K., Almadhor, A., Chan-
der, S., and Kumar, G. (2022). A hybrid deep learn-
ing based intrusion detection system using spatial-
temporal representation of in-Vehicle network traffic.
Vehicular Communications, 35:100471. Publisher:
Elsevier.
Lokman, S.-F., Othman, A. T., and Abu-Bakar, M.-H.
(2019). Intrusion detection system for automotive
Controller Area Network (CAN) bus system: a review.
EURASIP Journal on Wireless Communications and
Networking, 2019(1):184.
May, M. P., Henning, K.-U., and Sawodny, O. (2023). Ex-
perimental validation of sensor fault estimation for ve-
hicle dynamics with a nonlinear tire model. Control
Engineering Practice, 141:105725.
Mwanje, M. D., Kaiwartya, O., Aljaidi, M., Cao, Y., Ku-
mar, S., Jha, D. N., Naser, A., and Lloret, J. (2024).
Cyber security analysis of connected vehicles. IET
Intelligent Transport Systems.
Pacejka, H. B. (2012). Semi-Empirical Tire Models. Tire
and Vehicle Dynamics, pages 149–209. Publisher: El-
sevier.
Tan, R., Nguyen, H. H., Foo, E. Y. S., Yau, D. K. Y.,
Kalbarczyk, Z., Iyer, R. K., and Gooi, H. B. (2017).
Modeling and Mitigating Impact of False Data Injec-
tion Attacks on Automatic Generation Control. IEEE
Transactions on Information Forensics and Security,
12(7):1609–1624.
Wang, Y., Masoud, N., and Khojandi, A. (2020). Real-time
sensor anomaly detection and recovery in connected
automated vehicle sensors. IEEE transactions on
intelligent transportation systems, 22(3):1411–1421.
Publisher: IEEE.
Zhang, L. and Ma, D. (2022). A Hybrid Approach To-
ward Efficient and Accurate Intrusion Detection for
In-Vehicle Networks. IEEE access : practical inno-
vations, open solutions, 10:10852–10866.
VEHITS 2025 - 11th International Conference on Vehicle Technology and Intelligent Transport Systems
308
