
Towards Resource-Efficient Deep Learning for Train Scene Semantic
Segmentation
Marie-Claire Iatrides
1,2
, Petra Gomez-Kr
¨
amer
1
, Olfa Ben Ahmed
3
and Sylvain Marchand
1
1
L3i Laboratory, La Rochelle University, La Rochelle, France
2
Association Ferrocampus, Saintes, France
3
Xlim Institute of Research, Poitiers University, Poitiers, France
{marie-claire.iatrides, petra.gomez, sylvain.marchand}@univ-lr.fr, olfa.ben.ahmed@univ-poitiers.fr
Keywords:
Lightweight CNN, Resource-Efficient ML, Semantic Segmentation, Deep Learning, Train Environment.
Abstract:
In this paper, we present a promising application of scaling techniques for segmentation tasks in a railway
environment context to highlight the advantages of task specific models tailored for on-board train use. Smaller
convolutional neural networks (CNNs) do not focus on accuracy but resource efficiency. Our models are scaled
using skip connections as well as quantization in order to form lightweight models trained specifically for our
context. The proposed models have been evaluated both in terms of segmentation performance and efficiency
on state of the art scene segmentation datasets namely RailSem19 and Cityscapes. We have obtained models
with less than 3.5M parameters and a minimum of 78.4% of segmentation accuracy showing that lightweight
models can effectively segment the railway surroundings.
1 INTRODUCTION
Autonomous systems are the next step towards opti-
mizing transportation systems. The railway industry
is one of the most developed transportation modes in
France with over 27,483 km of rail tracks operated
by the SNCF (Soci
´
et
´
e Nationale des Chemins de Fer
franc¸ais). Because of its direct interactions with na-
ture, the railroad network requires considerable main-
tenance. Another challenge is that a lot of the technol-
ogy involved in our railroad system has not undergone
major renovations and therefore presents numerous
possibilities for innovation. For instance, some ac-
tive regional express railways date back to the 1980s
and little improvement has been made on parts of the
infrastructure. In this context, there are several major
challenges to tackle the development of both practi-
cal and environment friendly systems in the railway
industry. One of the major concerns of railway oper-
ations is the maintenance of the vegetation in the rail
surroundings. Vegetation has multiple impacts on the
rail traffic: it creates obstacles on the rails, endangers
ballast stability or can even cause derailments. As a
result, it is one of the main concerns for smaller re-
gional lines that are not isolated like most high speed
rails and are in direct interaction with nature.
We present in this article a study of resource-
efficient models for the detection and segmentation
of the train’s environment. We aim to develop an on-
board system that uses solely images as input to elab-
orate an analysis of the train’s surrounding. We fo-
cus on lightweight models to limit energy consump-
tion, CO
2
emissions and optimize memory space on-
board. With this in mind, semantic segmentation of
the scene allows for the detection of the different ele-
ments of the environment. As an embedded system, it
should follow a certain set of constraints, mainly re-
garding memory consumption, computer power and
inference. We therefore explored scaling techniques
in order to reduce the impact of our models. Scal-
ing can be approached through multiple angles such
as limited input information, model size and mem-
ory consumption. The aim is to determine whether
images are sufficient to perform predictive mainte-
nance on vegetation in the environment of trains with
a frugal deep learning approach. To that end, the
contributions of our work are a comparative study
for resource-efficient convolutional neural networks
(CNNs) for semantic segmentation, an adaptation of
scaling techniques from classification tasks to seg-
mentation, and then, a study of the effects of quanti-
zation on these CNNs and their limitations with more
complex datasets.
The remainder of this article is structured as fol-
lows. Firstly, we explore previous research related to
our task. Secondly, we define the perimeter we have
Iatrides, M.-C., Gomez-Krämer, P., Ben Ahmed, O. and Marchand, S.
Towards Resource-Efficient Deep Learning for Train Scene Semantic Segmentation.
DOI: 10.5220/0013139000003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 3: VISAPP, pages
347-354
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
347

chosen for our work and its application. And then, we
describe our approach to introduce our results. Lastly,
we discuss the implications of the said results in or-
der to conclude on their implications towards future
work.
2 RELATED WORK
In this section, we briefly review related work with
respect to autonomous trains and the maintenance of
their infrastructure. Furthermore, we discuss frugal
techniques in machine learning applications and im-
age segmentation methods.
2.1 Context
In recent years, there has been much progress in au-
tonomous driving surveillance systems (Zakaria et al.,
2022), but most are limited to either regular road ve-
hicles or trains operating in controlled environments
such as subways (Singh et al., 2021). While simi-
lar, operating conditions are much more complicated
for outdoor trains and require more frequent main-
tenance. In a previous work (Skibicki and Licow,
2022), researchers working with the Swedish railway
industry developed a vision-based method to detect
weed presence on tracks to evaluate the infestation
level. To the best of our knowledge, the research
community has yet to produce a complete system to
ensure maintenance of the surrounding vegetation in
the railway environment. Many works focus solely on
the application of autonomous systems for high speed
rail (Yin et al., 2020). On the other hand, research on
open environment lines are still very much lacking.
There are multiple ways to implement autonomous
systems in trains (Singh et al., 2021), each utilizing
different sources of information and applying a wide
variety of processing operations. A systematic review
of open-source datasets for railroad applications (Pap-
paterra et al., 2021) clearly shows that, while many
domains have been well explored for which data was
made available, there is still a lack of data for image
segmentation. In his thesis work (Duquene, 2023),
Duquene explores the use of imitation and reinforce-
ment learning architectures to create an autonomous
driving system for trains, primarily for speed control.
2.2 Image Segmentation
Previous works, such as RailNet (Wang et al., 2019),
introduced a deep-learning-based model for the bi-
nary semantic segmentation of railway environments
designed for railroad appreciation. This model shows
a high detection rate, but a relatively low accuracy.
The introduction of the SqueezeNet (Iandola et al.,
2016) architecture brought about the development of
light and fast semantic segmentation networks like
SqueezeUNet (Beheshti and Johnsson, 2020). This
work introduces the fire module that both reduces the
size of the model compared to a regular UNet and
has a 17 times lower inference. Another comparable
work is the Squeeze-SegNet (Nanfack et al., 2017)
that fuses the enhancing methods brought by SegNet
(Badrinarayanan et al., 2017) with those of the fire
module.
2.3 Scaling of Resources
Following an introduction to frugality in machine
learning (Evchenko et al., 2021), there are three main
aspects of frugality in this domain: cost of data, com-
putation process requirements and model character-
istics. There can be multiple approaches to this ob-
jective, but the most evident is to reduce the size of
the model as a whole, without modifying its struc-
ture. We call this method quantization. It converts
stored model weights into a smaller format. In a pre-
vious work, authors achieve a 4 to 8 times reduc-
tion of a CNN’s size through quantization and prun-
ing (Ahamad et al., 2022) with minimal drop in accu-
racy. In another thesis work, the author explored the
three types of quantization: data-free, gradient-based
post-training quantization (GPTQ) and quantization-
aware training (Yvinec, 2023). These methods show a
significantly unstable trade-off between accuracy and
speed. Another method to reduce the size of a model
is through its architecture, for example, skip connec-
tions.
Before the introduction of skip connections, mod-
els were limited in their depth by the vanishing gra-
dient. ResNet (He et al., 2016) was one of the first
works to find a solution to this challenge with the
introduction of the residual connection. EfficientNet
(Tan and Le, 2019) took this idea even further through
balance and optimization of smaller models for object
classification. Another significant work is the UNet
(Ronneberger et al., 2015) which implements long
skip connections between the encoder and decoder
blocks. In the field of classification, SqueezeNet (Ian-
dola et al., 2016) also paved the way for small model
architectures by introducing the fire module. And
lastly, DenseNet (Huang et al., 2017) introduced an-
other type of skip connections with the dense block.
It allows for better performance with smaller models
and makes better use of the existing parameters. In
our work, we have modified such models to be used
and compared in a semantic segmentation task. To do
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
348

so, we adapt the methods discussed in this section to
a specific application, the railroad environment. This
context brings strict requirements in model, input and
memory size. As such, these models and techniques
show clear potential for our application. Our ap-
proach also aims to determine the limit of model size
reduction using the aforementioned techniques and to
test the performances of our models under hard re-
source constraints.
3 PERIMETER OF STUDY
In railway tasks, there is still a lack of open-source
datasets. Existing image datasets for scene un-
derstanding are mainly limited to the detection of
signs, i.e. FRSign (Harb et al., 2020), of rails, i.e.
RailSet (Zouaoui et al., 2022) or Rail-DB (Li and
Peng, 2023), and thorough semantic segmentation,
i.e. RailSem19 (Zendel et al., 2019). We describe
in the following the task we address in this article as
well as the dataset we used.
Segmentation can serve to detect rails, but also
provides a gateway to infrastructure surveillance and
predictive maintenance. Analyzing what surrounds
the train allows for a more comprehensive system that
can adapt to its surroundings. As such, this task can
lead the system to prevent obstacle collision, infras-
tructure degradation or even critical failure of the rail-
way system. RailSem19 (Zendel et al., 2019) is intro-
duced as a complete dataset with 8,500 images con-
taining dense pixel-wise annotations for 19 classes.
Varying weather and lighting conditions are repre-
sented as well as speed associated blur effects and
lighting artifacts due to tunnels and nighttime capture.
Images are extracted from video sequences with an
ego-vehicle point of view with a 1920 × 1080 pixel
resolution.
Figure 1: Segmentation of a railway section following
SNCF regulations. (© SNCF R
´
eseau, modified).
This dataset is inspired by the Cityscapes dataset
both in terms of classes and labeling policy. Some im-
ages of trams and city railways are even taken from
Cityscapes to form RailSem19. RailSem19 contains
a thorough analysis of the elements comprised in the
railroad environment with an accurate declination of
its signalization system. All in all, these elements are
essential in a global analysis of the environment of
trains, but we are not interested in the elements that
provide traffic information in our task. For the anal-
ysis considered in this work, the original 19 classes
were modified to fit into 8 classes (Table 1). These
classes represent the zones of interest defined by the
SNCF for the analysis and evaluation of the vegeta-
tion in the railroad vicinity (Figure 1). Henceforth,
the modified dataset will be referred to as RailSem8.
4 SEMANTIC APPROACH
This work originates from the need of an industrial
application for predictive maintenance and environ-
ment perception in trains. In order to solve this task,
we focus on the surveillance of vegetation and its im-
pact on the region of circulation. In order to perceive
the environment, this work implements semantic seg-
mentation of images taken from the ego-perspective
of trains. In this section, we present the different mod-
els that where selected following the energy, storage
and computation power constraints necessary for on-
board systems. We also explore the implementation
of scaling techniques to the models for the develop-
ment of resource-efficient deep learning techniques.
Semantic segmentation provides a pixel-wise classi-
fication into a class through mapping. As a result, it
provides a detailed description of the entities that con-
stitute the environment of trains. While this task is
relatively costly in terms of computation, results can
provide fine-grained information on the input content.
4.1 Scaling Techniques
Scaling techniques were explored to limit the model’s
size and parameters without compromising results.
This work mainly focuses on the use of skip connec-
tions to limit the degradation of gradients and con-
serve high details. The downside of this architec-
ture is that the number of parameters is still rela-
tively high to be considered resource-efficient. For
example, a ResNet-18, the smallest publicly avail-
able network using this type of architecture, has a
total of 11.4M parameters. As a result, this type of
skip connection is not further explored in this work.
Dense connection-based architectures like DenseNet
(Huang et al., 2017) networks have a relatively low
number of parameters with similar performances. For
example, DenseNet-56, with 56 layers as opposed to
the original DenseNet-121, only counts 1.5M parame-
Towards Resource-Efficient Deep Learning for Train Scene Semantic Segmentation
349

Table 1: RailSem19 modified dense labels to RailSem8; In Frames = %age of frames with pixels in the corresponding class.
Label RS8 Rails Track Track-bed Terrain
Label RS19 rail-raised, rail-embedded tram-track, rail-track track-bed terrain
In Frames 100.0% 100.0% 87.6% 61.2%
Label RS8 Vegetation Sky Obstacles Background
Label RS19 vegetation sky human, car, truck, on-rails road, sidewalk, construction, fence, pole, traffic-light, traffic-sign, void
In Frames 83.3% 94.5% 13.8 ∼ 24.4% 72.1 ∼ 100.0%
ters. As a result, this technique seems very promising
for the task at hand in terms of model scaling. The
last method is the long skip. UNets are comparably
smaller models by design and are optimized for fast
processing, performance in image analysis and gener-
alization purposes. In order to profit from these char-
acteristics, this type of models was also explored in
this work.
4.2 Models
Four networks were implemented for this work:
UNet, Squeeze-UNet, DenseNet-67 and DenseNet-
56. All of these models are built with 4 en-
coder blocks and decoder blocks except DenseNet-
67, which has 5 encoder and decoder blocks as de-
scribed in Table 2. Based on the UNet (Ronneberger
et al., 2015) architecture an original version was im-
plemented for this project. While being relatively
big, UNet has a much faster inference time. The
model was adapted from the aforementioned meth-
ods and modified to a UNet-like architecture in or-
der to compare it to the other architectures explored
in this work. We implemented our own Squeeze-
UNet based on the description of the SqueezeSegNet,
a modified SqueezeNet. On the other hand, DenseNet
was originally developed for classification with 121
layers (Huang et al., 2017). In this work, we modi-
fied and implemented two versions, much smaller in
scale, DenseNet-56 and DenseNet-67. These models
have much fewer operations and parameters (Tables
3 and 4) and thus show promise in terms of mem-
ory efficiency. All selected models were chosen as
archetypes of scaling techniques in terms of inference
speed, performance improvements, and have shown
very promising results in similar applications.
In our work, we pre-processed data with size re-
duction in order to test the limits of input resolution
towards performance. We know that the size of pro-
cess during training is directly proportional to the size
of data. When reducing the image resolution, we
inevitably reduce the model’s capacity to recognize
fine details which then impacts the results and per-
formance. On the other hand, smaller images implies
higher batching of images is possible during training.
Increasing the batchsize allows for a better general-
ization during training which then improves perfor-
mance. All in all, the preprocessing allows for smaller
processes and improves generalization.
5 EXPERIMENTS AND RESULTS
All models in this work were trained from scratch on a
NVIDIA RTX A-6000 GPU with a 2.45GHz proces-
sor and AMD EPYC 7763 CPUs installed with 1To
of RAM. During initial tests, the models were trained
for 100 epochs and then for 200 epochs. All training
was done with a 1e-5 learning rate, a batchsize of 8
for training and 4 for validation. The loss function is
a cross entropy loss minimized through an Adam opti-
mizer. These parameters were chosen through empir-
ical analysis in order to find the best combination of
input parameters and evaluation processes. For our
experiments, we divided the datasets into 60-20-20
proportions for training, validation and testing sets
with a random split manual seed set at 0 for repeti-
tion. As for data pre-processing, we have worked to
enforce input efficiency by reducing the resolution of
the image from its original 1920×1080 to 320×240.
5.1 Model Comparison
As presented in Table 4, most models studied are
much smaller in terms of size compared to the state-
of-the-art shallow network, EfficientNet (Tan and Le,
2019) that counts 11.3M parameters. Squeeze-UNet,
counting 8.1M parameters (Table 4), was found to
perform poorly (Table 5) with a 0.691 Dice Score
compared to a minimum of 0.78 for the others and
returns masks that visually reveal a heavy error rate
(Figure 4) and was therefore pushed aside from our
analysis. Results in Figure 4 show there is a weak-
ness towards night view images, but visually have a
high performance even under rain or fog.
We also performed a convergence analysis of our
models over 100 epochs (Figure 2). The model was
tested at each modification of the weights after the
validation step. From this graph, we can see a rapid
increase of the quality of the performance accord-
ing to the Dice score in the early stages of training
and after the 20
th
iteration, the system stabilizes on
a linear convergence curve with R
2
= 0.85. Later re-
sults in Dice score, after 200 epochs of training (Table
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
350
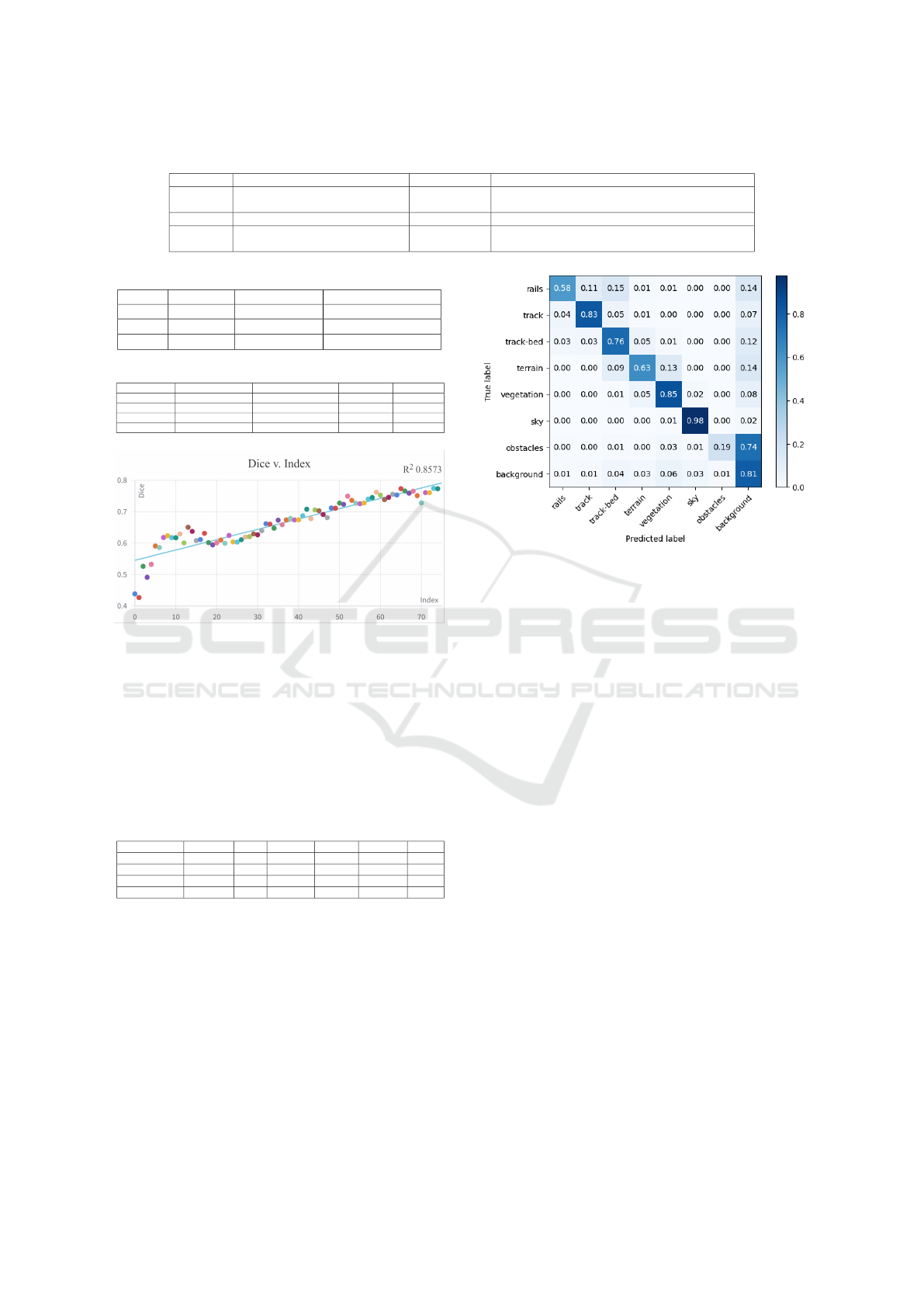
Table 2: Model architectures through blocks, each model is implemented with 4 or 5 encoder and decoder blocks.
Blocks UNet Squeeze-UNet DenseNet-56/-67
Encoder
[Conv3x3 + BatchNorm + ReLU] x2 [FireLayer] x2 [BatchNorm + ReLU + Conv3x3 + Dropout] x4 (x5)
MaxPool2x2 Conv4x4 [BatchNorm + ReLU + Conv1x1 + Dropout + MaxPool]
BottleNeck Conv1x1 [FireLayer] x2 [BatchNorm + ReLU + Conv3x3 + Dropout]
Decoder
ConvTranspose2x2 TransFireLayer ConvTranspose3x3
[Conv3x3 + BatchNorm + ReLU] x2 [FireLayer] x2 [BatchNorm + ReLU + Conv3x3 + Dropout] x4 (x5)
Table 3: Model size and operation counts.
Model UNet Squeeze-UNet DenseNet-56/-67
Params 31.0 M 8.1 M 1.4 M 3.5 M
FLOPs 118.2x10
9
111.5x10
9
27.6x10
9
64.5x10
9
MACs 59.0x10
9
55.6x10
9
13.6x10
9
31.9x10
9
Table 4: Model characteristics.
Model Inference time(ms) Check-point file(MB) Process(GB) Parameters
UNet 5.5 124.3 1.49 31.0 M
Squeeze-UNet 10.0 32.6 1.84 8.1 M
DenseNet-67 17.8 14.2 9.50 3.5 M
DenseNet-56 12.2 6.2 3.17 1.4 M
Figure 2: DenseNet-67 convergence graph over 100 epochs.
4), suggest a diminution of the learning curve with a
reduction of the impact of additional epochs on the
model’s performance. Between 100 and 200 epochs
for DenseNet-67, the Dice score increases of only
0.042 which gives a linear coefficient of R
2
= 0.42
after 100 epochs thus further supporting this conclu-
sion. It also shows a risk of over-fitting with further
training for this model.
Table 5: Model’s performance after 200 epochs of training.
Model Accuracy Dice F1-Score Jaccard Precision Recall
UNet 0.784 0.784 0.781 0.659 0.784 0.784
Squeeze-UNet 0.691 0.691 0.658 0.539 0.635 0.691
DenseNet-67 0.820 0.820 0.816 0.705 0.817 0.820
DenseNet-56 0.789 0.789 0.782 0.663 0.789 0.789
With models trained on 320 × 240 images for 200
epochs, results are very close (Table 5). While UNet
has the smallest process (Table 4), it is still relatively
big. On the other hand, DenseNet-67 obtains the best
performance scores on all metrics. Also we notice
only a 0.031 drop in Dice score with the DenseNet-56
which shows that smaller models are able to perform
just as well for semantic segmentation with a small
number of classes dataset. This proves that for our
task, resource-efficient models have great potential
and could have industrial use. The confusion matrix
(Figure 3) shows an imbalance in the model’s perfor-
Figure 3: DenseNet-67 normalized confusion matrix.
mance. If cross-referenced with Table 1, we can see
that the model clearly performs much better in classes
that are well represented, but has more trouble with
underrepresented classes like obstacles that are only
in 13.8% to 24.4% of the frames in the dataset. This
highlights the weakness of smaller models in their ca-
pacity to generalize for rare objects.
5.2 Quantization
In this work, we further explored model scaling
through the quantization of models. Quantization
compresses weights in float32 towards a smaller size,
for instance, int8. We tested it under two scenar-
ios post-training dynamic quantization (PTDQ) and
quantization-aware training (QAT). PTDQ is imple-
mented after training, truncating the values obtained
with a clipping range calibrated for each input. As a
result, the model loses in precision and performance.
On the other hand, QAT intervenes during training in
order to obtain a representation of the float operations
with lesser precision thus including it in the loss cal-
culations. PTDQ is easily implemented on a GPU,
but QAT is not supported to this day for GPU. As a
result, it only performs on CPU, the model’s infer-
ence is therefore a concern. Because of ecological
ethics, the model with QAT was halted after 1 epoch
as it lasted 50 min with the resources available. Table
6 shows the results of our different scenarios.
We decided to focus mainly on our most
Towards Resource-Efficient Deep Learning for Train Scene Semantic Segmentation
351
Table 6: DNet-56 before/after quantization (100 epochs).
Model Accuracy Dice F1-Score Jaccard Precision Recall
DenseNet-56 0.753 0.753 0.744 0.617 0.754 0.753
DNet-56 (PTDQ) 0.701 0.701 0.691 0.551 0.690 0.701
DNet-56 (QAT) NA NA NA NA NA NA
lightweight model, DenseNet-56, for quantization.
The difference in performance between the regular
and PTDQ version is only of 0.052 for the Dice score.
Again, it shows potential in terms of margin of error.
5.3 Task Evaluation
We implemented a comparative study between differ-
ent datasets in order to test the usefulness of our work
for other similar segmentation tasks. As Cityscapes
inspired RailSem19, it was chosen for our case study.
When tested on the original Cityscapes dataset that
contains 35 classes, DenseNets obtains very poor per-
formance results (Table 7), close to random. From
these results, we can infer that a 35 segmentation class
task is too complex for the small architectures we
have implemented. To verify this fact, we remapped
Cityscapes to match RailSem8 (Table 8) to effectively
compare performances on these datasets.
Table 7: Dice score on different datasets (200 epochs).
Model Cityscapes 35 Cityscapes 8 RailSem8
UNet NA 0.776 0.784
DenseNet-56 0.556 0.741 0.789
DenseNet-67 0.584 0.796 0.820
As the represented subject is different, class pro-
portions are also vastly unmatched. Cityscapes is
built with images taken from a vehicle ego-point
of view, but set in a different context. Where
RailSem8 represents mostly rails surrounded by na-
ture, Cityscapes shows urban areas with a much
higher concentration of humans, cars or other types
of vehicles, all considered as obstacles. After mod-
ifying Cityscapes, we notice a considerable increase
in performance of our models (Table 7). Results on
Cityscapes8 are lower than RailSem8, but with a max-
imum drop of 0.06 in Dice score for the DenseNet-56
and minimal drop of 0.008 for the UNet. The simil-
itude in tasks explains the closeness in results. An-
other aspect is that the label policy put in place for
RailSem19 is based of the one from Cityscapes. As a
result, the dense annotation is similar in style and ap-
proximation. On the other hand, Cityscapes counts
5000 images where RailSem19 has 8500, this ac-
counts for a slightly better generalization of the mod-
els using RailSem19 which, in turn, explains the small
performance drop. As a result, we can conclude that
our models can efficiently perform segmentation for
a low number of classes while being insufficient for
more detailed tasks.
6 DISCUSSION
This work towards efficient and lightweight deep
learning for semantic segmentation of railway envi-
ronments has shown promise, but there are still limi-
tations in terms of performance. While we were able
to demonstrate potential in the use of light models for
segmentation, it is paramount to appreciate the fact
that up-scaling the model size is not the only way to
enhance performance. For instance, a closer look at
segmentation results after DPTQ shows a slight in-
crease in performances for the detection of underrep-
resented classes in our dataset. Moreover, we ob-
served a drop in performance for the detection of ter-
rain, but an increase for the rail class. This observa-
tion shows that there is still room for optimization in
the computing of feature maps that could influence
the training process as a whole in favor of smaller
classes. Future work might include the exploration
of the effects of quantization on these values and the
model’s behavior regarding feature map construction
for these classes.
For resource-efficient processing, smaller models
do not always mean less resources needed (Table 4).
As a result, a model with more FLOPs and parameters
like UNet can show lower computational complexity
while performing similarly if not slightly better. For
an industrial application, the systems needs to be im-
plementable on-board in trains. As a result, a slightly
bigger model like UNet could still prove more suited
to commercial use as it is closer to real-time use with
less costly equipment. Therefore, with the available
data, we consider UNet to be the most appropriate so-
lution for industrial use in a constrained system. The
skip connection mechanisms employed in the UNet
and DenseNet architectures are at the root of the dif-
ference in operation processes. All in all, UNet is
deeper in terms of number of convolution layers but
faster overall. This problematic shows the challenge
of balancing model and learning process frugality op-
timization.
Our work has proven that a lower resolution can
show promising results without compromising learn-
ing efficiency. Naturally, there is a great chance that
these models could perform better on higher resolu-
tion images, but that would intricately increase pro-
cess requirements and therefore clash with our con-
straints. Future works include the implementation
of attention mechanisms or data augmentation to en-
hance segmentation performance on less represented
classes such as tracks. We also plan to implement this
section of our research in a more global vegetation
assessment application for railway maintenance.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
352
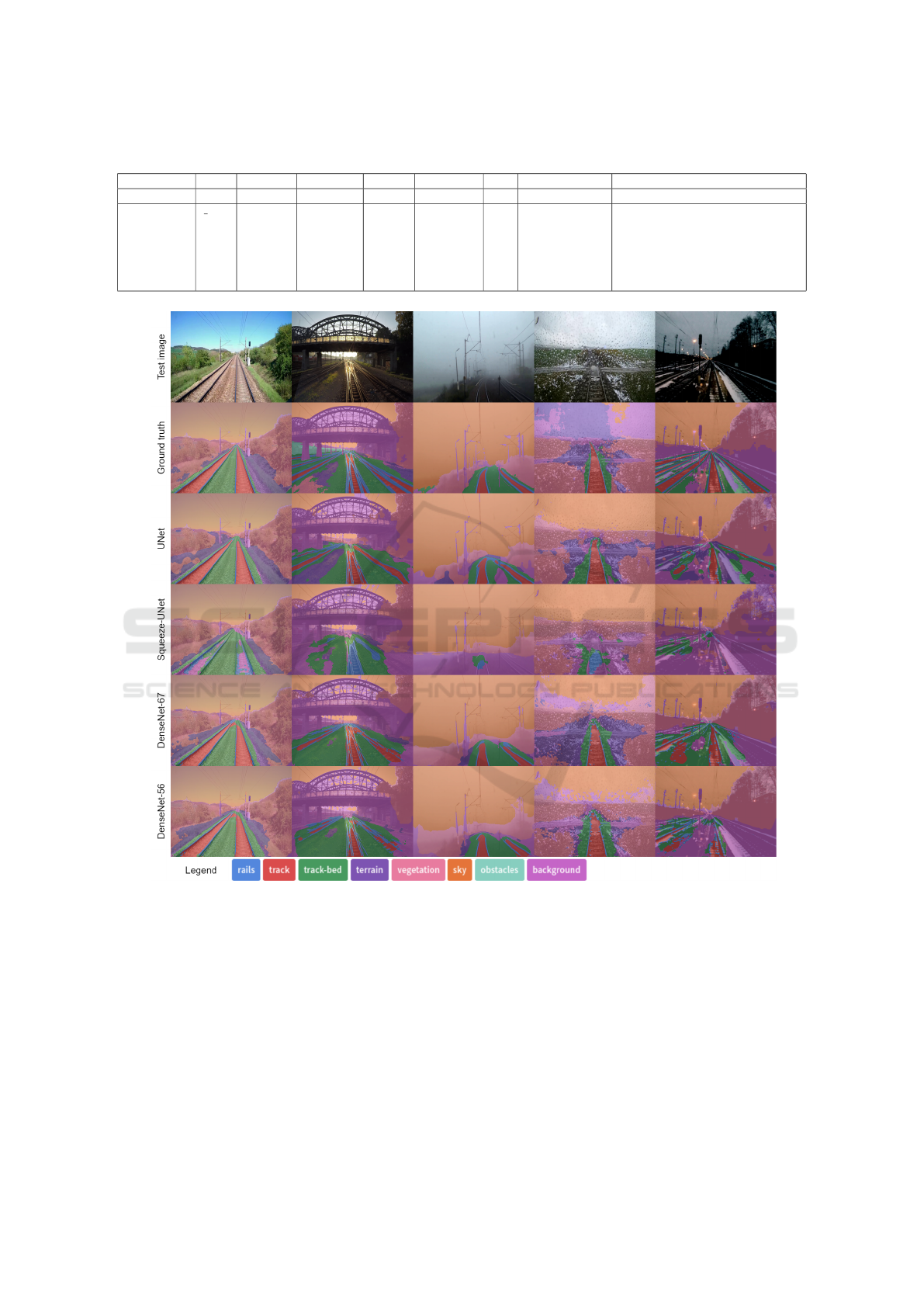
Table 8: Cityscapes (CS 35) modified dense labels to Cityscapes8 (CS 8) compared to RailSem8 (RS8) labels.
Label RS8 Rails Track Track-bed Terrain Vegetation Sky Obstacles Background
Label CS 8 Void Tracks Road Terrain Vegetation Sky Obstacles Background
Label CS 35 rail track road terrain vegetation sky person, rider,
car, truck, bus,
caravan, trailer,
motorcycle,
bicycle, license
plate
unlabeled, ego vehicle, rectifica-
tion border, out of roi, static, dy-
namic, ground, sidewalk, parking,
building, wall, fence, guard rail,
bridge, tunnel, pole, polegroup,
traffic light, traffic sign
Figure 4: Output of each model after training for 200 epochs.
7 CONCLUSION
In this paper, we propose a comparative study for
resource-efficient CNNs for semantic segmentation.
The models presented consist of the implementation
of known scaling techniques such as skip connec-
tions, and the adaptation of classifiers for segmen-
tation tasks while making the most of the mecha-
nisms developed to reduce model size. In our work,
we constrained our models to smaller architectures
while evaluating their performances on RailSem19
modified to RailSem8 and Cityscapes with 35 and 8
classes. Results show that our models have a very
small drop of performance when quantized and are
capable of detecting the main regions of interest for
industrial use in the detection of vegetation. In the
future, we will focus on optimizing results in order to
achieve real-time performance and raise segmentation
accuracy for under-represented classes.
Towards Resource-Efficient Deep Learning for Train Scene Semantic Segmentation
353

REFERENCES
Ahamad, A., Sun, C.-C., and Kuo, W.-K. (2022). Quan-
tized Semantic Segmentation Deep Architecture for
Deployment on an Edge Computing Device for Image
Segmentation. Electronics, 11(21):3561.
Badrinarayanan, V., Kendall, A., and Cipolla, R. (2017).
SegNet: A Deep Convolutional Encoder-Decoder Ar-
chitecture for Image Segmentation. IEEE Trans. Pat-
tern Anal. Mach. Intell., 39(12):2481–2495.
Beheshti, N. and Johnsson, L. (2020). Squeeze U-Net:
A Memory and Energy Efficient Image Segmentation
Network. In 2020 IEEE CVPR Workshops, pages
1495–1504.
Duquene, A. P. (2023). Apprentissage machine pour la
d
´
ecision de conduite autonome de v
´
ehicules guid
´
es :
Application dans le domaine ferroviaire. PhD thesis,
Universit
´
e Polytechnique Hauts-de-France.
Evchenko, M., Vanschoren, J., Hoos, H. H., Schoenauer,
M., and Sebag, M. (2021). Frugal Machine Learning.
arXiv:2111.03731.
Harb, J., R
´
eb
´
ena, N., Chosidow, R., Roblin, G., Potarusov,
R., and Hajri, H. (2020). FRSign: A Large-
Scale Traffic Light Dataset for Autonomous Trains.
arXiv:2002.05665.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep Resid-
ual Learning for Image Recognition. In 2016 IEEE
CVPR, pages 770–778.
Huang, G., Liu, Z., van der Maaten, L., and Weinberger,
K. Q. (2017). Densely Connected Convolutional Net-
works. In 2017 IEEE CVPR, pages 2261–2269.
Iandola, F. N., Han, S., Moskewicz, M. W., Ashraf, K.,
Dally, W. J., and Keutzer, K. (2016). SqueezeNet:
AlexNet-level accuracy with 50x fewer parameters
and ≤ 0.5mb model size. arXiv:1602.07360.
Li, X. and Peng, X. (2023). Rail Detection: An Efficient
Row-based Network and A New Benchmark. ACMM
2022 arXiv:2304.05667.
Nanfack, G., Elhassouny, A., and Thami, R. O. H. (2017).
Squeeze-SegNet: A new fast Deep Convolutional
Neural Network for Semantic Segmentation. ICMV
2017.
Pappaterra, M. J., Flammini, F., Vittorini, V., and Be
ˇ
sinovi
´
c,
N. (2021). A Systematic Review of Artificial Intelli-
gence Public Datasets for Railway Applications. In-
frastructures, 6(10):136.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-Net:
Convolutional Networks for Biomedical Image Seg-
mentation. MICCAI 2015 arXiv:1505.04597.
Singh, P., Dulebenets, M. A., Pasha, J., Gonzalez, E. D.
R. S., Lau, Y.-Y., and Kampmann, R. (2021). Deploy-
ment of Autonomous Trains in Rail Transportation:
Current Trends and Existing Challenges. IEEE Ac-
cess, 9:91427–91461.
Skibicki, J. D. and Licow, R. (2022). A Visual Method
of Measuring Railway-Track Weed Infestation Level.
Metrology, 2(2):230–240.
Tan, M. and Le, Q. V. (2019). EfficientNet: Rethinking
Model Scaling for Convolutional Neural Networks.
ICML 2019, pages 6105–6114.
Wang, Y., Wang, L., Hu, Y. H., and Qiu, J. (2019). Rail-
Net: A Segmentation Network for Railroad Detection.
IEEE Access, 7:143772–143779.
Yin, M., Li, K., and Cheng, X. (2020). A review on artificial
intelligence in high-speed rail. Transportation Safety
and Environment, 2(4):247–259.
Yvinec, E. (2023). Efficient Neural Networks : Post Train-
ing Pruning and Quantization. PhD thesis, Sorbonne
Universit
´
e.
Zakaria, B., Ben Ahmed, O., Amamra, A., Bradai, A.,
and Beghdad Bey, K. (2022). PSCS-Net: Perception
Optimized Image Reconstruction Network for Au-
tonomous Driving Systems. IEEE ITS, 24(2):1–16.
Zendel, O., Murschitz, M., Zeilinger, M., Steininger, D.,
Abbasi, S., and Beleznai, C. (2019). RailSem19: A
Dataset for Semantic Rail Scene Understanding. In
2019 IEEE CVPR Workshops, pages 1221–1229.
Zouaoui, A., Mahtani, A., Hadded, M. A., Ambellouis, S.,
Boonaert, J., and Wannous, H. (2022). RailSet: A
Unique Dataset for Railway Anomaly Detection. In
2022 IEEE IPAS, pages 1–6.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
354
