
Uncertainty-Driven Past-Sample Selection for Replay-Based Continual
Learning
Anxo-Lois Pereira
3 a
, Eduardo Aguilar
1,2 b
and Petia Radeva
1 c
1
Dept. de Matem
`
atiques i Inform
`
atica, Universitat de Barcelona, Gran Via de les Corts Catalanes 585, Barcelona, Spain
2
Dept. de Ingenier
´
ıa de Sistemas y Computaci
´
on, Universidad Cat
´
olica del Norte, Angamos 0610, Antofagasta, Chile
3
Dept. d’Enginyeria Inform
`
atica i Matem
`
atiques, Universitat Rovira i Virgili, Avda. Pa
¨
ısos Catalans 26, Tarragona, Spain
Keywords:
Continual Learning, Replay, Rehearsal, Uncertainty Quantification, Evidential Deep Learning.
Abstract:
In a continual learning environment, methods must cope with catastrophic forgetting, i.e. avoid forgetting
previously acquired knowledge when new data arrives. Replay-based methods have proven effective for this
problem; in particular, simple strategies such as random selection have provided very competitive results. In
this paper, we go a step further and propose a novel approach to image recognition utilizing a replay-based
continual learning method with uncertainty-driven past-sample selection. Our method aims to address the
challenges of data variability and evolving databases by selectively retaining and revisiting samples based on
their uncertainty score. It ensures robust performance and adaptability, improving image classification accu-
racy over time. Based on uncertainty quantification, three groups of methods were proposed and validated,
which we call: sample sorting, sample clustering, and sample filtering. We experimented and evaluated the
proposed methods on three public datasets: CIFAR10, CIFAR100 and FOOD101. We obtained very encour-
aging results largely outperforming the baseline sample selection method for rehearsal on all the datasets.
1 INTRODUCTION
Continual Learning (CL), or lifelong learning, gathers
together work and approaches that tackle the problem
of learning when the data distribution changes over
time, and where knowledge fusion over never-ending
streams of data needs to be accounted for (Lesort
et al., 2020). Traditional Machine Learning models
typically require retraining from scratch with the en-
tire dataset whenever new data is introduced, which is
both time-consuming and computationally expensive.
In contrast, CL aims to enable the model to learn con-
tinuously from new data streams, making the process
more efficient and scalable. However, CL is explicitly
limited by catastrophic forgetting (Wang et al., 2024),
which refers to the sudden and severe loss of prior
information in learning systems when acquiring new
information (Jedlicka et al., 2022).
To avoid catastrophic forgetting, strategies based
on regularization, architecture, and rehearsal have
been proposed (Masana et al., 2023). Specifically, in
a
https://orcid.org/0009-0004-9766-1418
b
https://orcid.org/0000-0002-2463-0301
c
https://orcid.org/0000-0003-0047-5172
the rehearsal-based method, a subset of the data used
for training is retained to preserve prior knowledge
in a CL framework. Several approaches have been
proposed for exemplar selection, such as: random-
based methods (Guo et al., 2022; Prabhu et al., 2020),
distance-based methods (Rebuffi et al., 2017), error-
based methods (Toneva et al., 2018), methods based
on parameter updating (Aljundi et al., 2019b; Aljundi
et al., 2019a; Sun et al., 2022), and those used for the
selection of CoreSet (Yoon et al., 2022; Hao et al.,
2023). Despite attempts to improve the sample se-
lection, the simplest method Random Selection (Guo
et al., 2022), continues to be the one commonly cho-
sen in CL and ends up being one of the best for the
rehearsal (Brignac et al., 2023; Borsos et al., 2020;
Yoon et al., 2022; Guo et al., 2022).
On the other hand, uncertainty-based approaches
have proven very effective in improving the under-
standing of the deep learning models (Abdar et al.,
2021). In particular, by analyzing epistemic uncer-
tainty it is possible to categorize the complexity of
the data as a function of the features learned dur-
ing training (Nagarajan et al., 2023). Data with high
epistemic uncertainty means being underrepresented
(e.g., a hard sample (Nagarajan et al., 2023) or OoD
Pereira, A.-L., Aguilar, E. and Radeva, P.
Uncertainty-Driven Past-Sample Selection for Replay-Based Continual Learning.
DOI: 10.5220/0013140700003912
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 20th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2025) - Volume 3: VISAPP, pages
365-372
ISBN: 978-989-758-728-3; ISSN: 2184-4321
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
365

data (Aguilar et al., 2023)). On the other hand, data
with low epistemic uncertainty corresponds to data
well-represented (e.g. an easy sample) in the training
dataset. We hypothesize that the uncertainty score re-
lated to each sample may be a good indicator when se-
lecting a suitable example to retain prior knowledge.
There are various approaches to quantify uncer-
tainty (Abdar et al., 2021), among which Evidential
Deep Learning (EDL) (Sensoy et al., 2018) stands out
for its ease of implementation and ability to quantify
uncertainty efficiently in terms of computational re-
sources. By integrating EDL into a CL framework, it
is possible to give confidence in a prediction given a
particular sample after each class-incremental learn-
ing step, and thus identify and prioritize past samples
that are most likely to improve model performance
and robustness.
To address the challenge of catastrophic forget-
ting, this paper proposes an innovative replay-based
CL method that uses uncertainty-based selection of
past samples. Our approach, which takes advan-
tage of quantified uncertainty through an EDL-based
method, not only improves the model’s ability to re-
tain previously learned information, but also ensures
that new knowledge is integrated more effectively.
The main contributions of this paper are as fol-
lows: 1) We are the first to use EDL uncertainty quan-
tification within the CL paradigm in a sample selec-
tion scheme for rehearsal; 2) We designed several
sample selection approaches based on uncertainty; 3)
We evaluated our sample selection approaches in 3
public benchmarking datasets: CIFAR10, CIFAR100,
and FOOD101; and 4) We outperformed the baseline
sample selection strategy with an improvement of up
to 2.21%, 3.05% and 4.13% in terms of AccFinal,
Acc1st, and Forgetting, respectively.
The rest of the paper is organized as follows: Sec-
tion 2 describes the proposed EDL-based Rehearsal
methods. In Section 3, the dataset, experimental se-
tups, and validation metrics are detailed. Section 4
shows the results of the proposed methods and base-
line for multiplies incremental settings. Finally, Sec-
tion 5 concludes the works and presents the future di-
rections.
2 METHODOLOGY
CL claims to create models that are able to adapt
to new situations and domains. Under CL, the Ma-
chine Learning method is trained iteratively as new
classes or new data arrive or are added to the model.
When the method is trained only with the new data,
it can completely forget the previous data, which is
called catastrophic forgetting. To avoid this, rehearsal
is used, where a small sample of previously learned
data is employed to avoid forgetting it. Considering a
Class-incremental learning scenario, we hypothesize
that uncertainty can provide us with a good perspec-
tive for selecting samples that preserve knowledge of
the seen classes.
In the following subsection, we first detail the
EDL-based method and then our proposed rehearsal
methods based on the uncertainty quantified after
each incremental step (also called experience).
2.1 Evidential Deep Learning
Uncertainty in deep learning can be interpreted as
how confident the model is in the prediction it has
made about a sample. In the sample selection litera-
ture, there are many interpretations and implementa-
tions of uncertainty for training deep learning mod-
els, such as the use of Kullback-Leibler divergence
in CAL or other CoreSet (Guo et al., 2022) methods
such as Least Confidence, Entropy and Margin (Cole-
man et al., 2020).
Unlike the previous methods, in this study, we
follow the implementation of the uncertainty mea-
sure presented in (Sensoy et al., 2018; Aguilar et al.,
2023), which is based on Evidence Theory, as this
method considers the performance achieved in object
recognition, the quality of the estimated uncertainty,
and the computational resources required. To un-
derstand how this method of quantifying uncertainty
works, we must first define how the evidence e is cal-
culated:
e
i
= σ( f
θ
(x
i
)); α
i
= e
i
+ 1. (1)
where e
i
is the evidence of a sample x
i
function f
θ
(·)
returns the output logits, or prediction, of a sample
using a neural network with the θ weights. It is im-
portant to note that this neural network does not have
a softmax layer or another activation layer at the end,
which makes the result of applying f
θ
(x
i
) on a sample
x
i
return the output logits of the sample x
i
prediction
and not the confidences of the predictions. To calcu-
late the evidence, a non-linearity must be applied to
ensure that the evidence is non-negative. This func-
tion is the function σ(·). Several functions can be
used to fulfill the role of the σ(·) function. For exam-
ple, in the original implementation, the authors used
the ReLU function (Sensoy et al., 2018). However, in
this study, we ended up using the exponential func-
tion exp(·), which is non-linear and ensures that the
result is greater than 0, considered to be more stable
than the ReLU (Bao et al., 2021; Aguilar et al., 2023).
On the other hand, we have the definition of α in the
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
366

Figure 1: Illustrative diagram of uncertainty calculation and sample selection.
equation (1), which represents the parameters of the
Dirichlet distribution, being greater than or equal to
1. Taking into account that K is the number of classes
in the experiment, the uncertainty is calculated as fol-
lows:
S
i
=
K
∑
j=1
α
i j
; u
i
=
K
S
i
(2)
where α
i j
is the value of α given for the j-th class of
the i-th sample. With this and taking into account that
α
i j
∈ [1, inf), S
i
∈ [K, inf) is ensured. Thus, u
i
∈ (0, 1]
where the value of maximum uncertainty i.e. 1 is only
taken, if the value of α, and therefore the evidence is
minimum (α
i j
= 1, ∀ j). With this definition, an un-
certainty value can be assigned to each of the training
samples, at the moment of training the model with
those samples, to obtain a value that can be sorted for
each of them, so that it can be used to select samples
for the rehearsal.
For the uncertainty to be properly calculated and
used for sample selection in rehearsal, the logits re-
sulting from the model must have values that allow
the correct interpretation of the evidence. For this, it
is necessary to change the training loss from Cross-
Entropy to the one used for Evidential Deep Learning
(Sensoy et al., 2018; Aguilar et al., 2023). Originally,
the use given to the definition of uncertainty used in
this study was to check how confident the model was
about the predictions of a given sample on a classical
Deep Learning framework. To give a correct predic-
tion of this value, the designers of this method, devel-
oped a loss function based on this implementation of
uncertainty to train the models. This loss function is
based on the Evidential Deep Learning (Sensoy et al.,
2018) method, or EDL for short, and is the Type II
Maximum Likelihood. For simplicity, we will refer to
this loss as EDL in the remainder of this study.
Given the sample x
i
and its ground-truth y
i
in a
one-hot vector encoding, the EDL loss function is cal-
culated as such that:
y
i j
=
(
1, if k = j
0, otherwise
(3)
L
i
=
K
∑
j=1
y
i j
× (log(S
i
) − log(α
i j
)) (4)
The value L
i
is the principal term of the loss of the
sample x
i
. An extra term is considered to act as a reg-
ularization to avoid providing evidence on misclassi-
fied samples. This is carried out by the KL-divergence
and is calculated as follows:
α
KL
i j
= e
i j
× (1 − y
i j
) + 1; S
KL
i
=
K
∑
j=1
α
KL
i j
(5)
KL
1
i
= ln
Γ(S
KL
i
)
Γ(K)
−
K
∑
j=1
ln
Γ(α
KL
i j
)
Γ(1)
(6)
KL
2
i
=
K
∑
j=1
(α
KL
i j
−1) × (
Γ
′
(α
KL
i j
)
Γ(α
KL
i j
)
−
Γ
′
(S
KL
i
)
Γ(S
KL
i
)
) (7)
KL
i
= KL
1
i
+ KL
2
i
. (8)
In these equations, lnΓ(·) is the natural logarithm
of the absolute value of the gamma function Γ(·), such
that lnΓ(·) = ln|Γ(·)|. At the same time,
Γ
′
(x)
Γ(x)
is the
logarithmic derivative of the Γ function.
Finally, the EDL loss function is defined as:
L
EDL
i
= (1 − λ) × L
i
+ λ × (C
ann
× KL
i
). (9)
where λ is equal to 0.1 and C
ann
is an annealing co-
efficient, which can be defined as a constant value or
as a value that mutates as training progresses. In this
study, C
ann
is equal to 0.01 throughout the training.
Uncertainty-Driven Past-Sample Selection for Replay-Based Continual Learning
367

2.2 EDL-Based Rehearsal Methods
Uncertainty is used as a measure of confidence for
each sample during inference, calculated after each
experience in the proposed methods’ training. Based
on the uncertainty of predictions for each sample, we
propose several strategies to select samples that retain
more information, helping to prevent catastrophic for-
getting. These strategies range from simple to com-
plex. A diagram illustrating the training process us-
ing any of these uncertainty-based sample selection
strategies is provided in Figure 1.
The simplest strategy is based on Samples Sort-
ing. Specifically, the proposed strategy named Simple
Uncertainty involves sorting the samples according to
their uncertainty and selecting those with the lowest
uncertainty. By doing so, the model will be trained
in future experiences with the samples that the model
can classify more reliably.
Another approach, based on Sample Clustering,
aims to ensure that the selected samples are as evenly
distributed as possible in terms of uncertainty. To
achieve this, we propose clustering the samples using
the K-Means algorithm. From each cluster, we se-
lect an equal number of samples, if possible, to main-
tain an even distribution. The samples can then be
chosen in various ways, such as randomly, which we
call Kmeans Random, or by iteratively selecting the
most central sample, i.e., the one closest to the me-
dian, which we call Kmeans Median.
The last approach, based on Samples Filtering,
considers eliminating the samples with the highest un-
certainty and then applying another strategy to ensure
that the chosen samples do not stray too far from what
the model has been able to learn. Two strategies have
been considered. First, by choosing the samples at
random over the non-eliminated samples, which we
call Filtered Random. Secondly, by eliminating the
samples and then applying the technique of Kmeans
Random, which we call Filtered Kmeans.
3 EXPERIMENTS
In this section, we explain the datasets used and jus-
tify their use. Then, we describe the hyperparameters
used in the training and their value. Finally, we define
the evaluation metrics used to compare the results.
3.1 Datasets
The study utilized three datasets, each serving a dif-
ferent purpose. CIFAR10 (Krizhevsky et al., 2009)
was used for preliminary validation of the proposed
methods on a small, simple dataset. CIFAR100
(Krizhevsky et al., 2009), an extension of CIFAR10
with more classes, was used to assess how the meth-
ods perform with a more complex dataset. The third
dataset, Food101 (Bossard et al., 2014), was used to
evaluate the methods in a much more complex do-
main, featuring large image sizes, several classes, and
high intra-class variability and inter-class similarity.
CIFAR10: consists of 10 classes, with 6,000 im-
ages per class—5,000 for training and 1,000 for eval-
uation, totaling 50,000 training and 10,000 evalua-
tion images. Its simplicity, due to the small number
of classes (10) and small image size (32x32 RGB),
makes it ideal for fast training and testing in a contin-
ual learning (CL) paradigm.
CIFAR100: is an extension of CIFAR10, featur-
ing 100 classes instead of 10, with the same num-
ber of images. Each class contains 600 RGB im-
ages—500 for training and 100 for evaluation—at the
same 32x32 size. While it shares the advantages of
CIFAR10, such as small image size for fast training
and widespread use as a benchmark, the increased
number of classes and reduced images per class make
training more challenging.
Food101: contains 101 food classes, with 750 train-
ing images and 250 evaluation images per class, total-
ing 101,000 images. It is still widely used while not a
standard benchmark like the other datasets. Due to its
larger size and increased complexity compared to CI-
FAR10 and CIFAR100, it is more challenging to train
on.
3.2 Experimental Setup
In all experiments for all datasets and models equiv-
alently, we defined the same type of buffer and pre-
pared the CL framework. Following the experimental
setup used in Deepcore (Guo et al., 2022), we used
a variable memory size buffer, where in a balanced
way (per experience), we kept a small percentage of
the samples for rehearsal. Specifically, we decided to
keep 10% of the samples of each experience in the
buffer. We focus on this range of percentage of sam-
ples because, for this range in (Guo et al., 2022) the
authors observed that the baseline random selection
results are notably higher compared to those of more
complex strategies.
The model trained in these experiments is the
ResNet-18 (He et al., 2016). These networks usu-
ally give outstanding results regardless of the train-
ing dataset, which has led to a standard benchmark-
ing model within an image classification problem.
Specifically, ResNet-18 is widely used in the litera-
ture to compare benchmarking (Masana et al., 2023;
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
368

Aguilar et al., 2023). For these reasons, we have de-
cided to use it within our study as the model to train
and evaluate our sample selection strategies for re-
hearsal.
To simulate a real-world scenario within a CL ex-
perimental setting, a Class-incremental learning sce-
nario was employed. The target dataset is divided into
several class groups, which are trained iteratively, one
after the other. These training phases, involving sub-
sets of classes, are referred to as experiences. It is evi-
dent that if the classes are entirely isolated, the classes
from the first experience may be completely forgotten
by the last one, a phenomenon known as catastrophic
forgetting.
The main hyper-parameters for training and re-
hearsal depended largely on the dataset, but remained
stable throughout all experiments done with each
dataset. The Table 1 lists these main parameters.
In this table, the columns Epochs and Increments,
given the training dataset, show the number of train-
ing epochs done in each experience and the number
of classes that are trained in each experience (without
counting the data in the rehearsal buffer) respectively.
The Base column is the number of classes that are
trained in the first experience of a given dataset. As
for the number of training experiences, we set it at a
total of 5. It is important to note that these parameters
do not fully apply to the robustness and generalization
experiments. For these experiments, we have tested
multiple combinations of the number of training ex-
periences and the percentage of the samples that are
stored in the memory buffer.
Table 1: Hyper-parameters used in the training of experi-
ments per dataset.
Dataset Epochs Increments Base
CIFAR10 10 2 2
CIFAR100 50 20 20
FOOD101 120 20 21
Other hyper-parameters had to be defined to con-
duct the benchmarking experiments. These hyper-
parameters were evaluated in the CIFAR10 dataset
and then used for the three datasets. The first hyper-
parameter was the number of clusters for the Kmeans-
based methods, where 15 was found to be the best
number consistently, except for the Filtered Kmeans
method, where 50 was found to be slightly better
sometimes. In the Filtered methods, we found that
the best percentage of data to remove before apply-
ing the selection algorithm is 20%. These values
were found experimentally in the CIFAR10 dataset
and used for all the datasets. The only exception to
this is the Learning Rate used. Both CIFAR datasets
were trained in the benchmarking experiments using
0.005 as the learning rate, while for FOOD101 0.001
was used instead.
All the models (all the experiments for all the
methods) were trained using as initial weights the
pre-trained on ImageNet (Krizhevsky et al., 2012)
ResNet-18. Also, to be able to correctly train these
datasets in the ResNet-18 neural network, some pre-
processing of the images and some data augmenta-
tion had to be applied. For the FOOD101 dataset,
a random flip is applied for data augmentation rea-
sons. Then the image is resized to 256 × 256 and ran-
domly cropped into a size of 224 × 224, which is the
pre-trained ResNet-18 input size. Finally, the image
is normalized. Similarly, the CIFAR datasets are first
cropped into 32×32 using padding = 4 as a data aug-
mentation technique (note that the original size was
already 32 × 32). Then the image is randomly flipped
horizontally and resized into 224 × 224. Finally, they
are normalized taking into account the mean and stan-
dard deviation of ImageNet.
3.3 Validation Metrics
To evaluate and compare the sample selection meth-
ods for rehearsal, we have mainly used accuracy,
which computation follows the equation (10), where
T P = True positive, FP = False positive, T N = True
negative and FN = False negative; the mean accuracy
(Acc) on the test set. Formally, the Acc in a CL prob-
lem can be defined as follows:
Acc
j
i
=
T P
j
i
+ T N
j
i
T P
j
i
+ T N
j
i
+ FP
j
i
+ FN
j
i
(10)
where Acc
j
i
denotes the average accuracy calculated
after the j-th experience of the data corresponding to
the new classes incorporated in the i-th experience.
There are two accuracy-based metrics selected
to evaluate model performance called AccFinal and
Acc1st which are defined as follows:
AccFinal = Acc
nE
1,...,nE
; Acc1st = Acc
nE
1
. (11)
As can be seen in the equation (11), the final aver-
age accuracy, AccFinal, calculates the accuracy after
the last experience considering data from all classes.
On the other hand, the metric Acc1st represents the
average accuracy of the data belonging to the classes
of the data used in the first experience, computed after
the whole training process is completed.
In addition to the accuracy, the Forgetting met-
ric was used. This metric is calculated as the mean
over the difference between the accuracy obtained af-
ter the first training on the data corresponding to the
new classes used in an experience and the accuracy
Uncertainty-Driven Past-Sample Selection for Replay-Based Continual Learning
369

obtained on the same experience data after the last ex-
perience, as in the equation (12), where Acc
nE
i
is the
accuracy of the experience i after the whole training
finished (after last experience training) and Acc
i
i
is the
accuracy of the experience i after the training of the
said experience i has finished. Unlike accuracy, the
less the Forgetting value is, the better the result is:
Forgetting =
1
nE
nE
∑
i=1
Acc
i
i
− Acc
nE
i
. (12)
4 RESULTS
This section presents a comparative analysis of the
proposed sample selection strategies, followed by a
comparison of the best strategy with the baseline. Fi-
nally, it includes an evaluation of the robustness and
generalizability of both strategies.
4.1 Evaluation of the Proposed Scores
for Sample Selection
Using the parameters stipulated in Table 1, we trained
on the CIFAR10 dataset with five different seeds for
each strategy. The results of the strategies on the
test set are summarized in Table 2. As can be seen,
the strategies belonging to Sample Filtering are the
ones that provide the best performance. In contrast,
the performance of the Simple Uncertainty strategy
differs greatly from the rest. The best performance
is achieved with Filtered Kmean, which provides a
noticeable improvement over the second best strat-
egy (Filtered Random) of 0.75%, 2.82% and 1.23%
in terms of AccFinal, Acc1st and Forgetting.
However, it should be noted that CIFAR10 has a
small number of classes, and the results may not nec-
essarily be the same in other scenarios involving more
classes. Therefore, we evaluated the same experi-
ments on a similar domain, but with 10 times more
classes, which is CIFAR100. As this dataset is more
complicated than CIFAR10, more training epochs are
needed. The results are shown in the Table 2. In the
CIFAR100 case, the strategy with the best average re-
sults in terms of AccFinal was the Simple Uncertainty
strategy. This method is closely followed for all the
Sample Filtering methods. On the other hand, for the
other metrics, the Filtered Random strategy gives con-
sistently better results, outperforming the rest of the
strategies.
Finally, we evaluated the most promising meth-
ods on the FOOD101 dataset. It should be noted that,
due to the very slow training with this dataset, only
four methods have been trained with only three seeds,
compared to the five seeds used for the other two
datasets. The results can be found in Table 2 for all
the metrics. Both strategies Simple Uncertainty and
Filtered Random provide comparable results in terms
of AccFinal. For the other metrics, Filtered Random
got the best results and was closely followed by Sim-
ple Uncertainty for the Acc1st and Filtered Kmeans
Random for the Forgetting.
Taking into account the performance obtained
among all the datasets, the strategy Filtered random
is selected for comparison with the baseline approach
because, although it is not always the best, it is the
strategy that provides the most stable behavior.
4.2 Comparison with Baseline
Approach
Table 3 shows the results obtained by the baseline
approach and the Filtered Random on the CIFAR10,
CIFAR100 and Food101 datasets. Overall, the pro-
posed strategy outperforms the baseline in all met-
rics evaluated, i.e., in terms of AccFinal, Acc1st
and Forgetting. The improvement is most notice-
able in the more challenging datasets (CIFAR100
and FOOD101). Particularly, in FOOD101, an im-
provement of the 2.21%, 3.07% and 2.12% in terms
of AccFinal, Acc1st and Forgetting. These re-
sults demonstrate the importance of using uncertainty
quantification to filter out samples with a high degree
of uncertainty before proceeding to random selection,
in order to obtain a better subset that will help pre-
serve prior knowledge and thus mitigate catastrophic
losses. On the other hand, it is interesting to note that
several of the proposed uncertainty-based strategies
other than Filtered Random, for some datasets, per-
form better, as seen in Table 2, and thus the results
difference is even greater.
4.3 Robustness and Generalizability
Analysis
The performance analysis is extended by consider-
ing different numbers of experiences and buffer sizes.
This allows us to evaluate the ability of the proposed
strategy to mitigate catastrophic forgetting in different
Class-incremental learning scenarios. The results are
presented in Table 4 for the baseline and the proposed
strategy for the CIFAR100 dataset. As expected, the
greater the number of experiences or the smaller the
buffer size, the greater the forgetting. A great im-
provement of the proposed strategy is seen in all con-
figurations except for 20 experiences and a buffer size
of 0.2. This demonstrates the generalizability of the
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
370
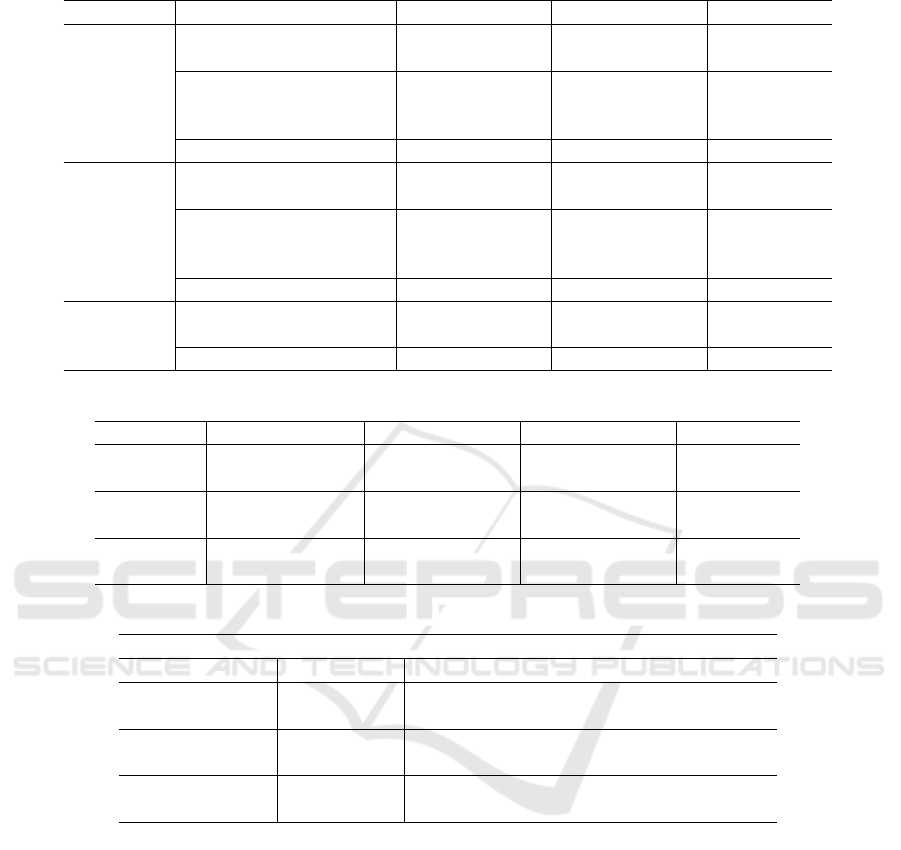
Table 2: Performance of the proposed strategies on the CIFAR10, CIFAR100 and FOOD101 datasets.
Dataset Strategy AccFinal ↑ Acc1st ↑ Forgetting ↓
CIFAR10 Kmean Random (k=15) 0.8934 ± 0.0096 0.8437 ± 0.0598 0.0454
Kmean Median (k=15) 0.8945 ± 0.0069 0.8526 ± 0.0619 0.0437
Filtered Random 0.8975 ± 0.0113 0.8653 ± 0.0842 0.0531
Filtered Kmean (k=15) 0.9050 ± 0.0122 0.8935 ± 0.0545 0.0408
Filtered Kmean (k=50) 0.9010 ± 0.0143 0.8789 ± 0.0481 0.0485
Simple Uncertainty 0.8624 ± 0.0233 0.8209 ± 0.0911 0.1170
CIFAR100 Kmeans Random (k=15) 0.5250 ± 0.0283 0.4499 ± 0.0266 0.3312
Kmeans Median (k=15) 0.4958 ± 0.0332 0.4209 ± 0.0506 0.3630
Filtered Random 0.5670 ± 0.0127 0.5241 ± 0.0374 0.2739
Filtered Kmeans (k=15) 0.5513 ± 0.0110 0.4994 ± 0.0426 0.2980
Filtered Kmeans (k=50) 0.5684 ± 0.0184 0.5155 ± 0.0585 0.2792
Simple Uncertainty 0.5689 ± 0.0276 0.4940 ± 0.0455 0.2943
FOOD101 Filtered Random 0.5076 ± 0.0164 0.4795 ± 0.0407 0.2898
Filtered Kmeans (k=15) 0.4789 ± 0.0209 0.4422 ± 0.0123 0.3215
Simple Uncertainty 0.5084 ± 0.0146 0.4677 ± 0.0393 0.3271
Table 3: Comparison of the selected best strategy with the baseline on the CIFAR10, CIFAR100 and FOOD101 datasets.
Dataset Strategy AccFinal ↑ Acc1st ↑ Forgetting ↓
CIFAR10 Random EDL 0.8927 ± 0.0275 0.8575 ± 0.0910 0.0571
Filtered Random 0.8975 ± 0.0113 0.8653 ± 0.0842 0.0531
CIFAR100 Random EDL 0.5544 ± 0.0112 0.4824 ± 0.0491 0.2856
Filtered Random 0.5670 ± 0.0127 0.5241 ± 0.0374 0.2739
FOOD101 Random EDL 0.4855 ± 0.0353 0.4491 ± 0.0261 0.3311
Filtered Random 0.5076 ± 0.0164 0.4795 ± 0.0407 0.2898
Table 4: Performance in terms of Forgetting for several incremental settings and buffer sizes on CIFAR100 dataset.
Buffer size : 0.1 0.05 0.2
Strategy Experiences Forgetting ↓ Forgetting ↓ Forgetting ↓
Random EDL 20 0.3556 0.4366 0.2973
Filtered Random 20 0.3392 0.4198 0.3168
Random EDL 10 0.3161 0.3873 0.2628
Filtered Random 10 0.2993 0.3775 0.2176
Random EDL 5 0.2856 0.3515 0.2393
Filtered Random 5 0.2739 0.3281 0.2355
proposed strategy for other buffer sizes and its robust-
ness to retain knowledge when performing more ex-
periences.
5 CONCLUSIONS
In this paper, we proposed several uncertainty-based
sample selection method strategies and evaluated
them on three public datasets. From the results,
we observe in the CIFAR10 and CIFAR100 datasets,
that at least one of the proposed strategies surpasses
the Random selection baseline in all validation met-
rics. Similarly, in FOOD101 dataset, all evaluated
uncertainty-based sample selection strategies, except
Filtered Kmeans, outperform the baseline. Among
all the datasets, the most consistent method is Fil-
tered Random. Particularly, in the large datasets (CI-
FAR100 and FOOD101), we found that although in
terms of AccFinal the strategy Simple Uncertainty it
is better (and much worse in the CIFAR10 dataset) by
a small margin, in the two other evaluation metrics
(Acc1st and Forgetting) Filtered Random is consis-
tently better. The experimental results demonstrate
that the predictive uncertainty related to each sample
provides relevant information for sample selection.
Specifically, the proposed best strategy can be inter-
preted as improving Random selection by filtering
high-uncertainty data before selection. With this fil-
tering was possible to improve the mitigation of catas-
trophic forgetting. In future work, we will explore the
integration of uncertainty into other strategies used in
Uncertainty-Driven Past-Sample Selection for Replay-Based Continual Learning
371

replay-based methods to analyze whether uncertainty
provides complementary information to improve the
sample selection they perform.
ACKNOWLEDGEMENTS
This work has been partially supported by the Span-
ish project PID2022-136436NB-I00 (AEI-MICINN),
Horizon EU project MUSAE (No. 01070421),
2021-SGR-01094 (AGAUR), Icrea Academia’2022
(Generalitat de Catalunya), Robo STEAM (2022-
1-BG01-KA220-VET-000089434, Erasmus+ EU),
DeepSense (ACE053/22/000029, ACCI
´
O), Deep-
FoodVol (AEI-MICINN, PDC2022-133642-I00),
PID2022-141566NB-I00 (AEI-MICINN), Beatriu de
Pin
´
os Programme and the Ministry of Research and
Universities of the Government of Catalonia (2022
BP 00257), and Agencia Nacional de Investigaci
´
on y
Desarrollo de Chile (ANID) (Grant No. FONDECYT
INICIACI
´
ON 11230262).
REFERENCES
Abdar, M., Pourpanah, F., Hussain, S., Rezazadegan, D.,
Liu, L., Ghavamzadeh, M., Fieguth, P., Cao, X., Khos-
ravi, A., Acharya, U. R., et al. (2021). A review
of uncertainty quantification in deep learning: Tech-
niques, applications and challenges. Information fu-
sion, 76:243–297.
Aguilar, E., Raducanu, B., Radeva, P., and Van de Weijer,
J. (2023). Continual evidential deep learning for out-
of-distribution detection. In ICCV Workshop, pages
3444–3454.
Aljundi, R., Belilovsky, E., Tuytelaars, T., Charlin, L., Cac-
cia, M., Lin, M., and Page-Caccia, L. (2019a). Online
continual learning with maximal interfered retrieval.
In NeurIPS, pages 11849–11860.
Aljundi, R., Lin, M., Goujaud, B., and Bengio, Y. (2019b).
Gradient based sample selection for online continual
learning. In NeurIPS, pages 11816–11825.
Bao, W., Yu, Q., and Kong, Y. (2021). Evidential deep
learning for open set action recognition. In ICCV,
pages 13349–13358.
Borsos, Z., Mutny, M., and Krause, A. (2020). Coresets via
bilevel optimization for continual learning and stream-
ing. In NeurIPS.
Bossard, L., Guillaumin, M., and Van Gool, L. (2014).
Food-101–mining discriminative components with
random forests. In ECCV, pages 446–461. Springer.
Brignac, D., Lobo, N., and Mahalanobis, A. (2023). Im-
proving replay sample selection and storage for less
forgetting in continual learning. In ICCV, pages 3540–
3549.
Coleman, C., Yeh, C., Mussmann, S., Mirzasoleiman, B.,
Bailis, P., Liang, P., Leskovec, J., and Zaharia, M.
(2020). Selection via proxy: Efficient data selection
for deep learning. In ICLR.
Guo, C., Zhao, B., and Bai, Y. (2022). Deepcore: A compre-
hensive library for coreset selection in deep learning.
In International Conference on Database and Expert
Systems Applications, pages 181–195. Springer.
Hao, J., Ji, K., and Liu, M. (2023). Bilevel coreset selection
in continual learning: A new formulation and algo-
rithm. In NeurIPS.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In CVPR, pages
770–778.
Jedlicka, P., Tomko, M., Robins, A., and Abraham, W. C.
(2022). Contributions by metaplasticity to solving
the catastrophic forgetting problem. Trends in Neu-
rosciences, 45(9):656–666.
Krizhevsky, A., Hinton, G., et al. (2009). Learning multiple
layers of features from tiny images.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
agenet classification with deep convolutional neural
networks. In NeurIPS, pages 1106–1114.
Lesort, T., Lomonaco, V., Stoian, A., Maltoni, D., Fil-
liat, D., and D
´
ıaz-Rodr
´
ıguez, N. (2020). Continual
learning for robotics: Definition, framework, learning
strategies, opportunities and challenges. Information
fusion, 58:52–68.
Masana, M., Liu, X., Twardowski, B., Menta, M.,
Bagdanov, A. D., and van de Weijer, J. (2023).
Class-incremental learning: Survey and performance
evaluation on image classification. IEEE TPAMI,
45(5):5513–5533.
Nagarajan, B., Bola
˜
nos, M., Aguilar, E., and Radeva, P.
(2023). Deep ensemble-based hard sample mining for
food recognition. Journal of Visual Communication
and Image Representation, 95:103905.
Prabhu, A., Torr, P. H. S., and Dokania, P. K. (2020).
Gdumb: A simple approach that questions our
progress in continual learning. In ECCV, volume
12347 of Lecture Notes in Computer Science, pages
524–540. Springer.
Rebuffi, S., Kolesnikov, A., Sperl, G., and Lampert, C. H.
(2017). icarl: Incremental classifier and represen-
tation learning. In CVPR, pages 5533–5542. IEEE
Computer Society.
Sensoy, M., Kaplan, L., and Kandemir, M. (2018). Evi-
dential deep learning to quantify classification uncer-
tainty. NeurIPS, 31.
Sun, Q., Lyu, F., Shang, F., Feng, W., and Wan, L. (2022).
Exploring example influence in continual learning.
NeurIPS, 35:27075–27086.
Toneva, M., Sordoni, A., des Combes, R. T., Trischler, A.,
Bengio, Y., and Gordon, G. J. (2018). An empirical
study of example forgetting during deep neural net-
work learning. In ICLR.
Wang, L., Zhang, X., Su, H., and Zhu, J. (2024). A compre-
hensive survey of continual learning: theory, method
and application. IEEE TPAMI.
Yoon, J., Madaan, D., Yang, E., and Hwang, S. J. (2022).
Online coreset selection for rehearsal-based continual
learning. In ICLR.
VISAPP 2025 - 20th International Conference on Computer Vision Theory and Applications
372
