
Swarm Intelligence-Based Algorithm for Workload Placement in
Edge-Fog-Cloud Continuum
Kefan Wu
1 a
, Abdorasoul Ghasemi
2 b
and Melanie Schranz
1 c
1
Lakeside Labs, Klagenfurt, Austria
2
Research Centre for Computational Sciences and Mathematical Modelling, Coventry University, Coventry, U.K.
Keywords:
Swarm Intelligence, Edge-Fog-Cloud Continuum, Ant Colony Optimization.
Abstract:
This paper addresses the workload placement problem in the edge-fog-cloud continuum. We model the edge-
fog-cloud computing continuum as a multi-agent framework consisting of networked resource supply and
demand agents. Inspired by the swarm intelligence behavior of the ant colony optimization, we propose a
workload scheduler for the arriving demand agents to increase local resource utilization and reduce com-
munication costs without relying on a centralized scheduler. Like the ants, the demand agents will release
pheromones on the resource agent to indicate the available resources. The next arriving demand agent will
most probably choose a neighbor, following the pheromone value and communication cost. The framework’s
performance is evaluated in terms of local resource utilization, dependency on fog and cloud, and commu-
nication cost. We compare these metrics for the ant-inspired algorithm with random and greedy algorithms.
The simulation results reveal that the proposed algorithm inspired by swarm intelligence can increase resource
utilization at the edge and reduce the dependency on higher layers, while also decreasing the communication
cost for the task of resource allocation.
1 INTRODUCTION
Data management and computing are key research ar-
eas in the Internet of Things (IoT). The initial solu-
tion is based on cloud computing due to its scalability
and efficiency. However, transmitting a large amount
of data to the cloud servers suffers from unpredictable
delays (Jiao et al., 2013). Storing privacy-critical data
in the cloud server may also trigger security issues
(Parikh et al., 2019). Hence, data processing closer to
the user, on the edge, should be considered.
Edge computing facilitates data processing at the
network’s edge (IoT devices or local servers) (Satya-
narayanan, 2017), This approach brings computation
closer to the data source, allowing for faster response
times and improved data security (Simi
´
c et al., 2021).
Nevertheless, edge devices have limited computing
and storage capabilities compared to cloud servers.
To bridge this gap, fog computing acts as an inter-
mediary layer to extend cloud services closer to the
edge devices (Bonomi et al., 2012), materializing the
a
https://orcid.org/0000-0001-7612-581X
b
https://orcid.org/0000-0002-4432-4504
c
https://orcid.org/0000-0002-0714-6569
edge-fog-cloud continuum. When the request, e.g., a
pod, the smallest and most basic deployable unit in
Kubernetes (Kim et al., 2021), arrives in the contin-
uum step by step randomly, they will be placed based
on their specific requirements such as resource de-
mand, latency, data security, etc. Hence, the workload
scheduler should be designed carefully to minimize
latency and maximize resource utilization.
Inspired by the collective behaviors in nature such
as schools of fish and flocks of birds, swarm intelli-
gence operates through decentralized, self-organizing
systems where the agents follow local rules with-
out centralized controllers leading to scalable, robust
and adaptive solutions (Schranz et al., 2021). These
characteristics make agent-based, swarm intelligence
methods particularly well-suited for optimizing re-
source allocation and task distribution in the hetero-
geneous and dynamic edge-fog-cloud environment.
Exactly this approach presents the focus of our pa-
per: We model the edge-fog-cloud computing contin-
uum as an agent-based system with resource agents
(edge, fog, cloud agents) and demand agents (pods).
Resource agents are characterized by different pa-
rameters such as available resources, communication
cost, etc. Demand agents decide the optimal resource
310
Wu, K., Ghasemi, A. and Schranz, M.
Swarm Intelligence-Based Algorithm for Workload Placement in Edge-Fog-Cloud Continuum.
DOI: 10.5220/0013140800003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 1, pages 310-317
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

agent for processing based on these parameters. We
propose a swarm intelligence workload scheduler mo-
tivated by the ant colony optimization (ACO) algo-
rithm (Dorigo and St
¨
utzle, 2003). Pods are modeled
as ants. They can lay down the pheromones at each
resource agent with a designed update rule based on
the available resources when pods leave the agent.
We also define the probability of the pods moving
to the neighbors based on the pheromone values and
communication costs if pods are not served in the
current resource agent. Simulation results illustrate
that the ACO-based scheduler outperforms baseline
schedulers by employing random and greedy strate-
gies. Summarized, the main contributions of the pa-
per are the following:
• We use agent-based modelling to map the re-
source and demand agents, presenting the com-
plex interplay in the edge-fog-cloud continuum.
• We propose a swarm intelligence-based workload
scheduler inspired by ACO. Specifically, we intro-
duce the pheromone update to indicate the avail-
able resources, joined with the communication
cost for a reallocation on each resource agent.
• We develop a new simulation framework to evalu-
ate the ACO algorithm against random and greedy
methods through different case studies. The re-
sults show that ACO algorithm outperforms the
baseline algorithms in terms of higher local re-
source utilization, lower communication cost, and
a reduced dependency on fog and cloud nodes.
The remainder of the paper proceeds as follows:
Section 2 introduces the current state-of-the-art in the
edge-fog-cloud continuum, swarm intelligence, and
ACO. Section 3 presents the model of the edge-fog-
cloud continuum. The workload scheduler based on
ACO is proposed in Section 4. Section 5 provides the
simulation case studies compared with two baseline
algorithms. Section 6 concludes this work.
2 RELATED WORK
This section reviews the current state-of-the-art in
the edge-fog-cloud continuum workload placement
mechanism, general and with a special focus on
swarm intelligence.
Workload allocation in the edge-fog-cloud contin-
uum presents significant challenges due to the het-
erogeneous nature of resources and varying compu-
tational capabilities across different layers (Shi et al.,
2016). In recent years, several methods worked on
strategies for workload offloading in edge computing:
For instance, federated learning was implemented to
tackle the offloading problem in vehicular edge com-
puting in (Hasan et al., 2024). In another work, game
theory was considered for the task offloading in edge
computing (Chen et al., ). In (Tong et al., 2020), an
adaptive task offloading and resource allocation al-
gorithm is proposed for mobile edge computing en-
vironments, utilizing deep reinforcement learning to
make offloading decisions and allocate computing re-
sources efficiently. However, in the works mentioned
above, the paradigms are considered isolated. To inte-
grate them as a continuum seamlessly over all layers
on the edge, fog and cloud, analytical and hierarchical
availability models were provided for the edge-fog-
cloud computing continuum in (Pereira et al., 2022).
A workload scheduling based on an adaptive con-
tainer managed by Kubernetes was proposed for the
continuum in (Robles-Enciso and Skarmeta, 2024). It
is noticeable that how to manage the edge-fog-cloud
continuum more effectively is still a challenge for
workload placement design (Gkonis et al., 2023).
This brings us to swarm intelligence, a promis-
ing approach that provides adaptive methods for op-
timizing workload allocation in the edge-fog-cloud
continuum, leveraging self-organization to man-
age distributed resources efficiently (Schranz et al.,
2021).In (Rajesh et al., 2020), a swarm intelligence
algorithm was applied in IoT routing to extend net-
work life and cut energy costs. The authors in (Saba
et al., 2023) proposed a load-balancing method us-
ing swarm intelligence for data management to re-
duce the response time of the cloud servers. In an-
other work, an innovative hybrid swarm intelligence
algorithm was designed in (Attiya et al., 2022) for
task scheduling in cloud computing to increase the
rate of convergence. The most innovative work comes
from (Ghasemi and Schranz, 2024), where the au-
thors tackle the dynamic nature of the available re-
sources and workloads from the bottom-up. The
delay-sensitive and insensitive pod agents are co-
located in the modelled multi-agent system to min-
imize slack resources while improving resource uti-
lization for edge micro data centers.
To tackle the high complexity behind workload
allocation in the continuum, we implement the Ant
Colony Optimization (ACO) based on the swarm be-
haviors of real ant colonies (Dorigo et al., 2006). The
authors in (Corominas et al., 2023) proposed an ACO-
based method to deal with the network alignment is-
sue. In (Wu et al., 2023), an adaptive ACO algorithm
was designed for path planning in robotics. In another
work, the resource allocation problem was considered
in (Du et al., 2023) for avionics systems. They pro-
vided an improved ACO strategy to minimize the en-
ergy cost during the allocation task. Moreover, the
Swarm Intelligence-Based Algorithm for Workload Placement in Edge-Fog-Cloud Continuum
311
MEA 𝑣
1
MEA 𝑣
2
MEA 𝑣
3
MEA 𝑣
4
MEA 𝑣
5
MFA 𝑣
7
MFA 𝑣
6
MFA 𝑣
8
MCA 𝑣
9
MCA 𝑣
10
IoT Devices
IoT Devices
IoT Devices
IoT Devices
IoT Devices
EMDCs
EMDCs
EMDCs
Cloud Server
Cloud Server
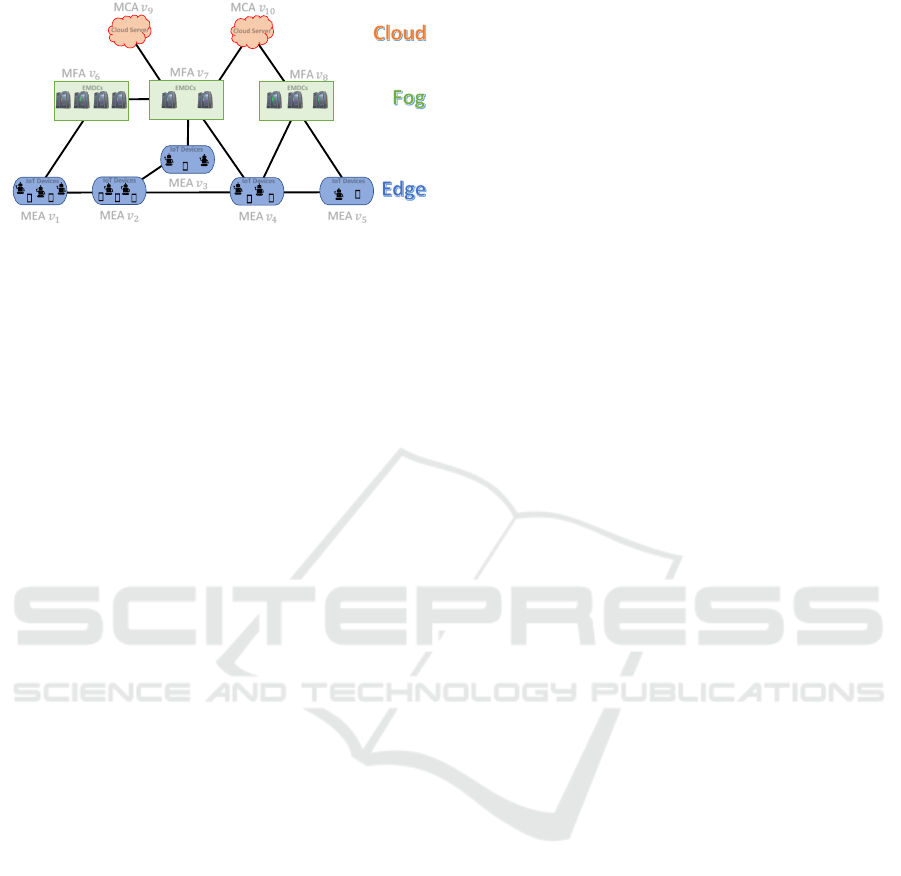
Figure 1: Exemplary architecture of the considered Edge-
Fog-Cloud Continuum.
authors in (Chandrashekar et al., 2023) proposed a
hybrid weight ACO method for task scheduling in
cloud computing. This novel scheduler was able to
enhance the performance compared with some tradi-
tional algorithms. Summarized, ACO is a powerful
tool for optimization problems in network routing and
scheduling (Bai et al., 2024). Thus, the ACO seems
to be a candidate algorithm for the flexible workload
placement we require in the highly dynamic edge-fog-
cloud continuum.
3 SYSTEM MODEL AND MAIN
OBJECTIVES
In this Section, we model the edge-fog-cloud contin-
uum as a multi-agent swarm system and describe the
features of the swarm agents. Three metrics are pro-
vided to evaluate the performance of the scheduler.
3.1 System Model of the Continuum
We introduce two types of swarm agents in the
continuum: resource agents and demand agents.
The resource agents are located in each comput-
ing node with available CPU and Memory (MEM)
resources. They are embodied by a Multi-layer
360° dynamIc RunTime Orchestration (MIRTO) en-
gine (related to the EU-Horizon project MYRTUS,
see ACKNOWLEDGEMENT), so we call them
MIRTO agents (Palumbo et al., 2024). Thus,
the MIRTO agents in the edge/fog/cloud comput-
ing paradigm are the MIRTO edge/fog/cloud agents
(MEA/MFA/MCA) in this paper. The type and capac-
ity of the resources depend on their layer. Each MEA
includes some IoT devices such as robots, smart-
phones, etc. MFA is comprised of a set of edge micro
data centers (EMDC), and MCA is run by big servers
with unlimited resource capacities. The main prin-
ciple of the considered edge-fog-cloud continuum is
sketched in Figure 1. The MEA/MFA/MCA are de-
noted by blue/green/orange blocks. The solid black
lines represent the connections in the continuum. The
demand agents are represented by pods in the Kuber-
netes context. Each pod has a specific demand for
resources and execution steps. So they are divided
into small, medium, and large pods. Pods arrive in
the continuum with specific steps generated by an ex-
ponential random variable with a parameter µ ∈ (0,1],
which reveals the frequency of arriving pods.
The different resource agents are also connected
to ensure that pods can move freely through the
links. This enables all resource agents to jointly
form a seamless edge-fog-cloud continuum. Ac-
cording to the concepts in graph theory (Godsil and
Royle, 2013), we can define the interaction topology
of the resource agents in the continuum as a graph
G = (V ,E). V = V
e
∪ V
f
∪ V
c
= {v
1
,..., v
N
} is
the vertex set of each resource swarm agent, where
V
e
= {v
1
,..., v
N
e
}, V
f
= {v
N
e
+1
,..., v
N
e
+N
f
}, and
V
c
= {v
N
e
+N
f
+1
,..., v
N
} represent the vertex set of
the MEA, MFA, and MCA, respectively. N
e
, N
f
, and
N
c
denote the number of the MEA, MFA, and MCA.
N = N
e
+ N
f
+ N
c
stands for the number of all the re-
source swarm agents. The set E ⊆ V × V reveals the
connection of the continuum. ∀v
i
,v
j
∈ V , (v
i
,v
j
) ∈ E
means that there are connection between the resource
agent i and j, and pods can move between the i
th
and j
th
resource agent, otherwise not. Since the con-
nections in the continuum can be inter-layer or intra-
layer, the edge set E can be rewritten as
E = E
ee
∪ E
e f
∪ E
f f
∪ E
f c
(1)
where E
ee
and E
f f
stand for the set of the connec-
tions in edge and fog computing paradigm. E
e f
(E
f c
)
is the set of connections between the edge layer and
fog layer (fog layer and cloud layer). It can be ob-
served from (1) that there are no connections between
the cloud servers because they manage their resources
in centralized manner. There is also no direct connec-
tions between the edge to the cloud layer. Then we
can define the neighbor set of the resource agent v
i
as
N
i
= {v
j
∈ V : (v
i
,v
j
) ∈ E}. (2)
The available resources in v
i
are denoted as
R
v
i
= (R
CPU
v
i
,R
MEM
v
i
), where R
CPU
v
i
and R
MEM
v
i
repre-
sent the available CPU and MEM resources. The de-
mand resource for the k
th
pod is denoted by D
k
=
(D
CPU
k
,D
MEM
k
). When the k
th
pod arrives at the re-
source agent v
i
, this MIRTO agent will provide infor-
mation about the resource available to the pod. If
D
CPU
k
≤ R
CPU
v
i
and D
MEM
k
≤ R
MEM
v
i
(3)
there are enough resources that can be assigned and
pods can finish execution here. Otherwise, the pod
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
312

can receive the available resource information from
the neighbor set N
i
, chooses one, and moves to it.
Each pod constantly rechecks the available resources
until it finds the resource agent with adequate re-
sources. Once pod k processes in the MIRTO agent
v
i
, the available resources in v
i
will be reduced to
R
v
i
− D
k
until pod finishes execution. After process-
ing, the resources are released again.
3.2 Main Objectives
This section focuses on developing the workload
scheduler for the edge-fog-cloud continuum. The
main objective for each pod is to find the resource
agent to meet its demand with the least latency. To
evaluate the performance of the workload scheduler,
we introduce three metrics as key performance indi-
cators (KPI): resource utilization (RU), dependency
on fog/cloud (DF/DC) and communication cost (CC).
The RU of CPU/MEM for v
i
is defined as
RU
CPU
v
i
=
ˆ
R
CPU
v
i
− R
CPU
v
i
ˆ
R
CPU
v
i
, RU
MEM
v
i
=
ˆ
R
MEM
v
i
− R
MEM
v
i
ˆ
R
MEM
v
i
(4)
where
ˆ
R
CPU
v
i
and
ˆ
R
MEM
v
i
are the capability of CPU and
MEM resources of v
i
.
ˆ
R
CPU
v
i
− R
CPU
v
i
and
ˆ
R
MEM
v
i
−
R
MEM
v
i
are the CPU and MEM resource used by v
i
These resources are assigned to pods for execution
and will be released when pods leave the continuum.
Assume that there are Q pods arriving in the con-
tinuum. For the k
th
arriving pod, denote the visited
resource agent set as M
k
= {v
k
1
,··· ,v
k
m
} ⊆ V . Let I
f
k
and I
c
k
be the indicators to reflect whether the k
th
pod
visited MFA and MCA. They are shown as follows
I
f
k
=
1, if M
k
∩ V
f
̸= ∅
0, if M
k
∩ V
f
= ∅
(5)
and
I
c
k
=
1, if M
k
∩ V
c
̸= ∅
0, if M
k
∩ V
c
= ∅.
(6)
Hence, DF and DC are defined as
DF =
∑
Q
k=1
I
f
k
Q
, DC =
∑
Q
k=1
I
c
k
Q
. (7)
The path of the k
th
pod is defined as
P
k
= {(v
k
1
,v
k
2
),··· ,(v
k
m−1
,v
k
m
)} ⊆ E. Let c
i j
be the
CC to transmit pod from resource agent v
i
to resource
agent v
j
, thus, the average CC for Q pods that arrive
in the continuum is defined as
CC
avg
=
∑
Q
k=1
∑
(v
i
,v
j
)∈P
k
c
i j
Q
(8)
where
∑
(v
i
,v
j
)∈P
k
c
i j
denotes the CC of the k
th
pod
(CC
k
). In summary, the ultimate goal of this work
is to design a workload scheduler with high local RU,
low DF/DF, and low CC.
4 METHODOLOGY
In this Section, we will introduce the swarm intelli-
gence workload placement inspired by the ACO al-
gorithm, where we map the pods to the role of ants
that can release pheromones on each resource agent.
Therefore, we define the pheromone value on the re-
source agent v
i
as τ
i
. The initial pheromone value
on each resource agent depends on the layer they are
located at. We design the update scheme τ
i
on the
MIRTO agent v
i
as
τ
i
:= τ
i
+ γ∆τ
k
i
(9)
if the k
th
pod finished execution on v
i
. ∆τ
k
i
is the re-
leased pheromone value by pod k on v
i
. This value is
related to the demand of the k
th
pod. γ is a parameter
which represents the pheromone deposit factor.
In contrast, if the k
th
pod arrives at v
i
, but cannot
be served here, we introduce the evaporation for the
pheromone value on v
i
. This can be regarded as the
reduction of the pheromone value if the pods are re-
jected to be served. The updated rule is designed as
τ
i
:= (1 − ρ
k
)τ
i
(10)
where ρ
k
denotes the evaporation rate which is also
related to the demand of the k
th
pod. Then, the pod
should decide where to go next from the neighbor set
N
i
. It can be observed from (9) and (10) that the
pheromone values reveal the available resources on
each MIRTO agent. When it comes to how to select
the neighbors, we first implement two baseline algo-
rithms (random and greedy). After that, we design a
swarm intelligence algorithm for the selection based
on the ACO method to make a decision for the next
MIRTO agent from the set N
i
. The algorithms are
presented as follows.
• Random. The pods randomly choose a resource
agent from the neighbor set N
i
and check the
available resource again until they find the re-
source agent meeting their demand. Although the
random algorithm exhibits excellent scalability,
often requires less computational resources and
can be easier to implement, it is hard to find the
appropriate resource agent at an appropriate time
in many cases.
• Greedy. The pods move to a resource agent with
the maximum pheromone value from the neigh-
bor set N
i
(if there are multiple MIRTO agents
Swarm Intelligence-Based Algorithm for Workload Placement in Edge-Fog-Cloud Continuum
313
MEA 𝑣
1
MEA 𝑣
2
MEA 𝑣
3
MEA 𝑣
4
MEA 𝑣
5
MFA 𝑣
7
MFA 𝑣
6
MFA 𝑣
8
MCA 𝑣
9
MCA 𝑣
10
D=(16,16)
R=(8,4)
R=(16,8)
R=(32,32)
R=(8,64)
R=(2,4)
R=(8,2)
R=(32,4)
ACO
Random
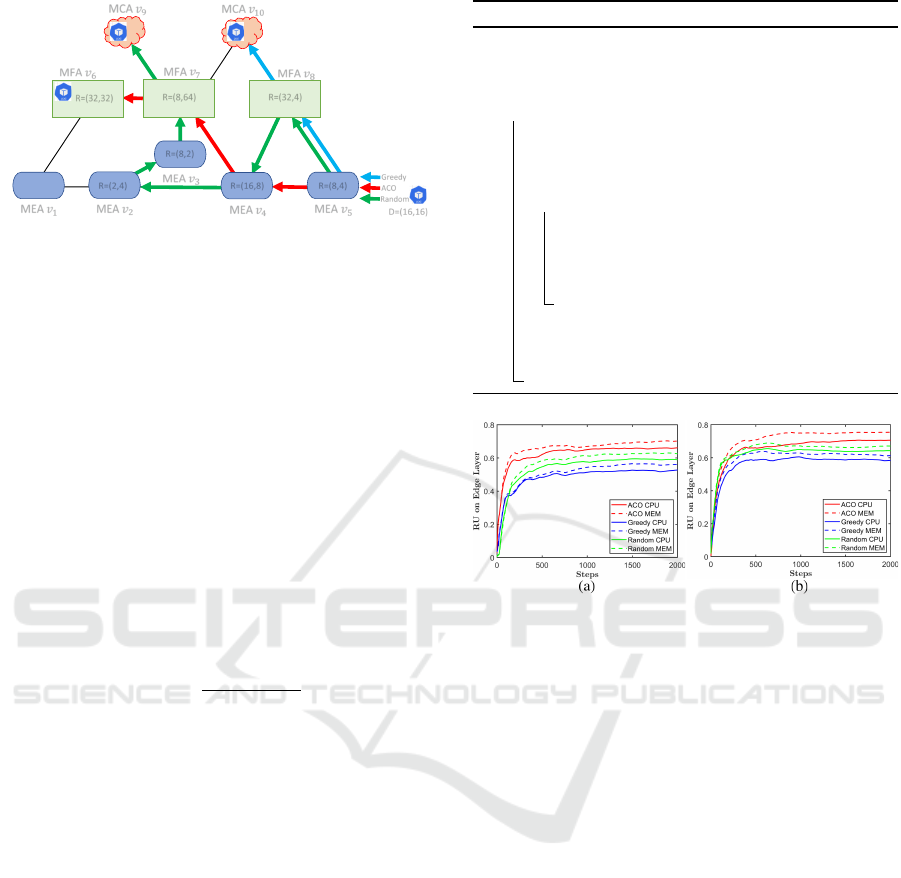
Greedy
Figure 2: Three possible paths of a pod to find a suit-
able resource agent in the continuum under random (green),
greedy (blue), and ACO (red) algorithms.
with the same maximum pheromone value, one is
randomly chosen). However, privacy issues may
not be guaranteed since the pods are inclined to go
to the higher layer (edge to fog, or fog to cloud)
under the greedy algorithm. Additionally, the
inter-layer transmission cost is much higher than
the intra-layer, which is not suitable for latency-
sensitive tasks.
• ACO. As the transmission cost is also an impor-
tant factor for workload management, it should be
taken into consideration when pods make their de-
cision. Motivated by the ACO method, the pods
move to a resource agent v
j
∈ N
i
with the proba-
bility p
j
defined as follows
p
j
=
τ
α
j
η
β
i j
∑
v
j
∈N
i
τ
α
j
η
β
i j
(11)
where η
i j
= 1/c
i j
denotes the heuristic desirabil-
ity which is the inverse of the transmission cost
between v
i
and v
j
. α and β are two weighting pa-
rameters, one for the pheromone value, the other
for the transmission cost. It can be observed from
(11) that pods are favorable to move to the neigh-
bor with a large number of available resources
and low communication costs. Hence, more pods
can be served locally on the edge layer instead of
moving to the fog or cloud layer. Algorithm 1
summarizes the behavior of pods by implement-
ing the ACO-based workload scheduling.
Figure 2 illustrates three possible paths of a pod n
with an exemplary demand of D
n
= (D
CPU
n
,D
MEM
n
) =
(16,16) to find the resource agent. The green path
is generated under the random algorithm. Since
the neighbor is selected randomly, the pod visits six
MIRTO agents without enough available resources.
Finally, it is transmitted to the cloud server. The blue
path stands for the greedy algorithm, the pod moves
directly to the MFA v
8
and then goes to the cloud
server. The red one represents the most likely path
Algorithm 1: ACO Based Workload Placement.
Input: Pods enter the continuum
Output: The path to the best resource agent
1 Initialization phrase;
2 for k ← 1 to Q do
3 Start randomly from a MEA v
i
;
4 Check the available resources ;
5 while Resource condition (3) is not
satisfied do
6 Update the pheromone value by (10) ;
7 Choose a neighbor based on (11);
8 Move to the selected resource agent;
9 Recheck the available resources.
10 Finishing execution;
11 Update the pheromone value by (9);
12 Leave the continuum.
Figure 3: Resource utilization (RU) on edge layer of the
three algorithms with µ = 0.5 (a) and µ = 0.8 (b).
of the pod under ACO algorithm. It can be served on
fog layer without visiting too many MIRTO agents.
5 SIMULATION CASE STUDIES
In this Section, the edge-fog-cloud continuum is sim-
ulated using the MESA library (Masad et al., 2015) in
a Python environment. We first set up the parameters
in the continuum. After that, the analysis and discus-
sion of the simulation results are presented to com-
pare the ACO algorithm with two baseline algorithms
in three aspects (RU, DF/DC, and CC), as mentioned
in Section 3.2.
5.1 Setup of the Continuum
In this simulation framework, we exemplary consider
ten MEA, five MFA, and two MCA in the contin-
uum. The capacity is defined as 16 or 32 CPU/MEM
resource units for each MEA. MFA is comprised of
a set of EMDC with a capacity equal to 64 or 128
CPU/MEM resource units, and the capacity MCA is
assumed unlimited. Their connections are generated
randomly by NetworkX (Platt, 2019) to ensure that
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
314
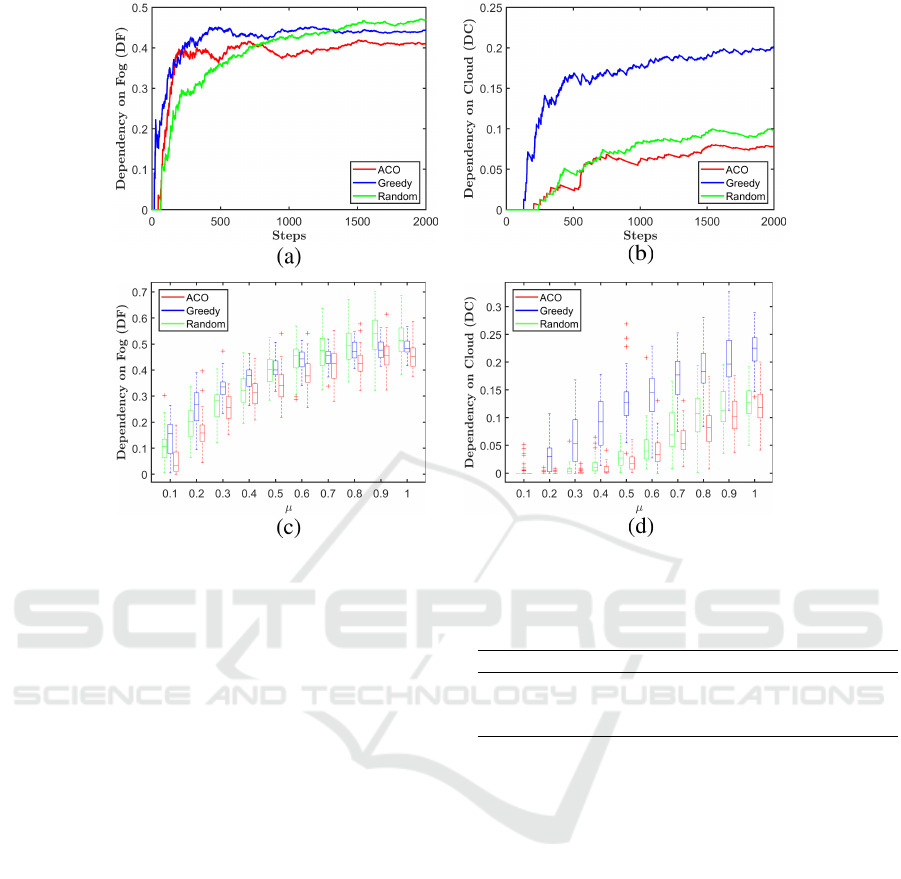
Figure 4: Dependency on fog (a) and cloud (b) (DF/DC) of the three algorithms with µ = 0.8, and box-plot of DF (c) and DC
(d) with different µ under three algorithms in 50 simulations.
the continuum is connected according to our model
described in Section 3. The communication cost c
i j
is
defined as follows
c
i j
=
1, if i, j ∈ V
e
2, if i, j ∈ V
f
5, if i ∈ V
e
, j ∈ V
f
30, if i ∈ V
f
, j ∈ V
c
(12)
The initial pheromone values τ
i
for the MEA are
defined as τ
i
= 4, if the capacity is (16,16), τ
i
= 6 if
the capacity is (32,32), and τ
i
= 5 otherwise. Simi-
larly, for the MFA, τ
i
= 12, if the capacity is (64,64),
τ
i
= 18 if the capacity is (128,128), and τ
i
= 15 oth-
erwise. The initial pheromone values on MCA equal
to 50 and will not be updated during the process.
The demand agents are represented by pods in the
Kubernetes context. Small (Medium) pods require 1
or 2 (4 or 6) CPU/MEM resource units with the ex-
ecution steps distributed from 20 to 30 (50 to 130)
uniformly and randomly. Their frequency of arrival is
0.4. For large pods, they need 8 or 16 CPU/MEM re-
source units with the execution steps distributed from
200 to 400 and the frequency of arrival is 0.2. Table 1
lists all the features of the arriving pods.
The parameters in the algorithms are defined
based on following criteria: As γ indicates the proba-
bility of considering pheromone values for a resource
Table 1: Pod profiles.
CPU/MEM Demand Execution Steps
Small 1 or 2 / 1 or 2 [20,30]
Medium 4 or 6 / 4 or 6 [50,130]
Large 8 or 16 / 8 or 16 [200,400]
allocation decision, we set γ = 1 on edge layer, γ = 0.6
on fog layer, and γ = 0 on cloud servers. As we
want to achieve a low dependency on the cloud, the
values are chosen in descending order. The released
pheromone ∆τ
k
and ρ
k
are designed related to the de-
mand of the pods. We set ∆τ
k
as 1, 2, and 3 for small,
medium, and large pods. ρ
k
is set as 0.15, 0.1, and
0.05 for small, medium, and large pods. The weight
parameters are designed as α = 1.4 and β = 1. We set
the iteration steps to 2,000 for each simulation.
5.2 Results and Discussion
Figure 3 demonstrates the resource utilization (RU)
on the edge layer first, as lightly loaded edge-fog-
cloud continuum with µ = 0.5 and second, a heav-
ily loaded one using µ = 0.8. It can be obtained that
RU on the edge layer under the ACO algorithm is
increased compared with the other two baseline al-
gorithms. More pods can be served locally instead
of moving to higher layers under ACO algorithm for
Swarm Intelligence-Based Algorithm for Workload Placement in Edge-Fog-Cloud Continuum
315
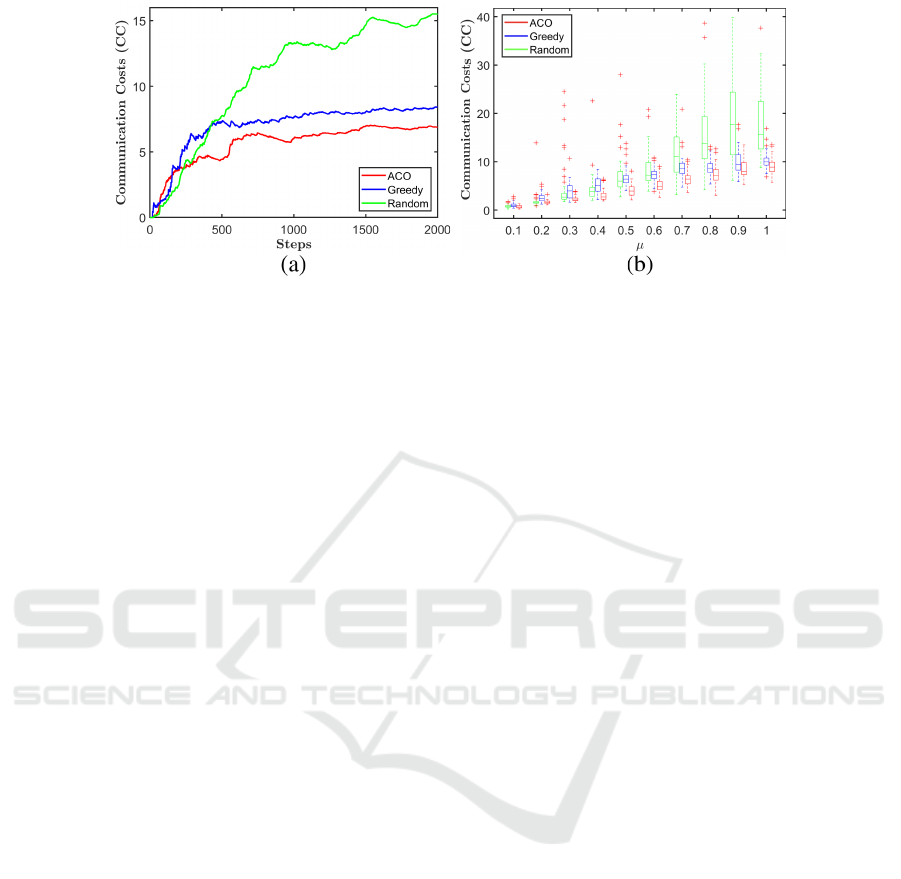
Figure 5: Communication costs (CC) of the three algorithms with µ = 0.8 (a), and box-plot of CC with different µ in 50
simulations (b).
both lightly and heavily loaded continuums.
Figure 4 (a) and (b) illustrate the dependency on
fog and cloud layer (DF/DC) with µ = 0.8. We
can observe that DF/DC under the ACO algorithm is
lower than another algorithm after 2,000 steps if the
load is heavy. Moreover, we explore the DF/DC with
different µ. The results are shown by box-plot in Fig-
ure 4 (c) and (d) by running 50 simulations. It is no-
ticeable that the greedy algorithm relies much more
on the cloud (as it has much more resources available
and the algorithm goes always for the highest avail-
ability). The DF/DC under the ACO algorithm keeps
the lowest for the different loaded continuums.
Figure 5 (a) reflects the communication costs (CC)
with µ = 0.8. The baseline algorithms are still higher
than the ACO algorithm as the iteration steps increase.
Moreover, the CC with different µ is presented in Fig-
ure 5 (b) in 50 simulations. ACO algorithms can also
save the CC compared with the baseline algorithms.
To sum up, compared with the two baseline algo-
rithms, the ACO algorithm increases the local RU and
decreases the DF/DC. This is because the scheduler
based on the ACO algorithm considers both available
resources and transmission costs. The pods are in-
clined to go to the matched MIRTO agent without too
many costs. Implementing the ACO algorithm also
reduces the CC. In conclusion, the ACO algorithm
demonstrates improved performance in optimizing lo-
cal resource utilization and minimizing data trans-
fer and computational costs across the edge-fog-cloud
continuum. This approach not only enhances the ef-
ficiency of workload distribution but also addresses
critical concerns related to latency and privacy, mak-
ing it particularly suitable for applications with strin-
gent requirements in these areas, where computing on
the edge is favored over cloud computing.
6 CONCLUSION
This paper investigates the workload placement prob-
lem for the edge-fog-cloud continuum. A multi-
agent framework is established to model the contin-
uum with arriving pods as demand agents and contin-
uum nodes as resource agents. We design a swarm-
based workload scheduler to place each demand agent
at a proper resource agent considering the available
resources and communication cost. The proposed al-
gorithm is inspired by ACO, where pods mimic the
behavior of ants by laying down pheromones on each
resource agent to reveal the available resources. The
probability of the pods moving to neighbors is also
defined based on the pheromone value and commu-
nication costs. Compared with random and greedy
algorithms, numerical studies illustrate that the work-
load scheduler based on swarm intelligence shows
higher local resource utilization with lower depen-
dency on fog and cloud. Future works will try to mod-
ify the algorithm to consider more factors, such as pri-
vacy issues. Moreover, other approaches, such as evo-
lutionary algorithms and approaches from reinforce-
ment learning, will be explored to design adaptable
rules for distributed resource allocation in dynamic
edge-fog-cloud continuum.
ACKNOWLEDGEMENT
Funded by the European Union, project MYRTUS, by
grant No. 101135183. Views and opinions expressed
are however those of the author(s) only and do not
necessarily reflect those of the European Union. Nei-
ther the European Union nor the granting authority
can be held responsible for them.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
316

REFERENCES
Attiya, I., Abd Elaziz, M., Abualigah, L., Nguyen, T. N.,
and Abd El-Latif, A. A. (2022). An improved hybrid
swarm intelligence for scheduling iot application tasks
in the cloud. IEEE Transactions on Industrial Infor-
matics, 18(9):6264–6272.
Bai, X., Liu, D., and Xu, X. (2024). A review of improved
methods for ant colony optimization in path planning.
Journal of Ship Research, pages 1–16.
Bonomi, F., Milito, R., Zhu, J., and Addepalli, S. (2012).
Fog computing and its role in the internet of things. In
Proceedings of the 1st Edition of the MCC workshop
on Mobile Cloud Computing, pages 13–16.
Chandrashekar, C., Krishnadoss, P., Kedalu Poornachary,
V., Ananthakrishnan, B., and Rangasamy, K. (2023).
Hwacoa scheduler: Hybrid weighted ant colony opti-
mization algorithm for task scheduling in cloud com-
puting. Applied Sciences, 13(6):3433.
Chen, Y., Zhao, J., Hu, J., Wan, S., and Huang, J. Dis-
tributed task offloading and resource purchasing in
noma-enabled mobile edge computing: Hierarchical
game theoretical approaches. ACM Transactions on
Embedded Computing Systems, 23(1):1–28.
Corominas, G. R., Blesa, M. J., and Blum, C. (2023).
Antnetalign: Ant colony optimization for network
alignment. Applied Soft Computing, 132:109832.
Dorigo, M., Birattari, M., and Stutzle, T. (2006). Ant colony
optimization. IEEE Computational Intelligence Mag-
azine, 1(4):28–39.
Dorigo, M. and St
¨
utzle, T. (2003). The ant colony opti-
mization metaheuristic: Algorithms, applications, and
advances. Handbook of Metaheuristics, pages 250–
285.
Du, X., Du, C., Chen, J., and Liu, Y. (2023). An energy-
aware resource allocation method for avionics systems
based on improved ant colony optimization algorithm.
Computers and Electrical Engineering, 105:108515.
Ghasemi, A. and Schranz, M. (2024). Bottom-up re-
source orchestration in edge computing: An agent-
based modeling approach. In 12th IEEE International
Conference on Intelligent Systems, pages 1–7.
Gkonis, P., Giannopoulos, A., Trakadas, P., Masip-Bruin,
X., and D’Andria, F. (2023). A survey on iot-edge-
cloud continuum systems: status, challenges, use
cases, and open issues. Future Internet, 15(12):383.
Godsil, C. and Royle, G. F. (2013). Algebraic graph theory,
volume 207. Springer Science & Business Media.
Hasan, M. K., Jahan, N., Nazri, M. Z. A., Islam, S., Khan,
M. A., Alzahrani, A. I., Alalwan, N., and Nam, Y.
(2024). Federated learning for computational offload-
ing and resource management of vehicular edge com-
puting in 6g-v2x network. IEEE Transactions on Con-
sumer Electronics, 70(1):3827–3847.
Jiao, L., Friedman, R., Fu, X., Secci, S., Smoreda, Z., and
Tschofenig, H. (2013). Cloud-based computation of-
floading for mobile devices: State of the art, chal-
lenges and opportunities. 2013 Future Network & Mo-
bile Summit, pages 1–11.
Kim, E., Lee, K., and Yoo, C. (2021). On the resource man-
agement of kubernetes. In 2021 International Confer-
ence on Information Networking, pages 154–158.
Masad, D., Kazil, J. L., et al. (2015). Mesa: An agent-based
modeling framework. In SciPy, pages 51–58. Citeseer.
Palumbo, F., Zedda, M. K., Fanni, T., Bagnato, A., Castello,
L., Castrillon, J., Ponte, R. D., Deng, Y., Driessen, B.,
Fadda, M., et al. (2024). Myrtus: Multi-layer 360 dy-
namic orchestration and interoperable design environ-
ment for compute-continuum systems. In Proceedings
of the 21st ACM International Conference on Comput-
ing Frontiers: Workshops and Special Sessions, pages
101–106.
Parikh, S., Dave, D., Patel, R., and Doshi, N. (2019). Secu-
rity and privacy issues in cloud, fog and edge comput-
ing. Procedia Computer Science, 160:734–739.
Pereira, P., Melo, C., Araujo, J., Dantas, J., Santos, V., and
Maciel, P. (2022). Availability model for edge-fog-
cloud continuum: an evaluation of an end-to-end in-
frastructure of intelligent traffic management service.
The Journal of Supercomputing, pages 1–28.
Platt, E. L. (2019). Network science with Python and Net-
workX quick start guide: explore and visualize net-
work data effectively. Packt Publishing Ltd.
Rajesh, G., Mercilin Raajini, X., Ashoka Rajan, R.,
Gokuldhev, M., and Swetha, C. (2020). A multi-
objective routing optimization using swarm intelli-
gence in iot networks. In In Proceedings of the In-
telligent Computing and Innovation on Data Science
Conference, pages 603–613. Springer.
Robles-Enciso, A. and Skarmeta, A. F. (2024). Adapting
containerized workloads for the continuum comput-
ing. IEEE Access, 12:104102–104114.
Saba, T., Rehman, A., Haseeb, K., Alam, T., and Jeon, G.
(2023). Cloud-edge load balancing distributed proto-
col for ioe services using swarm intelligence. Cluster
Computing, 26(5):2921–2931.
Satyanarayanan, M. (2017). The emergence of edge com-
puting. Computer, 50(1):30–39.
Schranz, M., Di Caro, G. A., Schmickl, T., Elmenreich,
W., Arvin, F., S¸ekercio
˘
glu, A., and Sende, M. (2021).
Swarm intelligence and cyber-physical systems: con-
cepts, challenges and future trends. Swarm and Evo-
lutionary Computation, 60:100762.
Shi, W., Cao, J., Zhang, Q., Li, Y., and Xu, L. (2016). Edge
computing: Vision and challenges. IEEE Internet of
Things Journal, 3(5):637–646.
Simi
´
c, M., Proki
´
c, I., Dedei
´
c, J., Sladi
´
c, G., and Milosavl-
jevi
´
c, B. (2021). Towards edge computing as a ser-
vice: Dynamic formation of the micro data-centers.
IEEE Access, 9:114468–114484.
Tong, Z., Deng, X., Ye, F., Basodi, S., Xiao, X., and Pan,
Y. (2020). Adaptive computation offloading and re-
source allocation strategy in a mobile edge computing
environment. Information Sciences, 537:116–131.
Wu, L., Huang, X., Cui, J., Liu, C., and Xiao, W. (2023).
Modified adaptive ant colony optimization algorithm
and its application for solving path planning of mobile
robot. Expert Systems with Applications, 215:119410.
Swarm Intelligence-Based Algorithm for Workload Placement in Edge-Fog-Cloud Continuum
317
