
Coordinated Self-Exploration for Self-Adaptive Systems in Contested
Environments
Saad Sajid Hashmi
1
, Hoa Khanh Dam
1
, Alan Colman
2
, Anton V. Uzunov
3
, Quoc Bao Vo
2
,
Mohan Baruwal Chhetri
4
and James Dorevski
1
1
University of Wollongong, Wollongong, Australia
2
Swinburne University of Technology, Melbourne, Australia
3
Defence Science and Technology Group, Adelaide, Australia
4
CSIRO’s Data61, Melbourne, Australia
Keywords:
Incompatible States, Goal Dependency, Adversarial Search, Multi-Agent Systems.
Abstract:
Enhancing the resilience and flexibility of distributed software systems is critical in challenging environments
where adversaries can actively undermine performance and system operations. One approach for achieving re-
silience is to employ collections of intelligent software agents that can autonomously execute management ac-
tions and adapt a target system according to pre-defined goals, thereby realising various self-* properties. Self-
exploration is one such self-* property, relating to a system’s ability to compute resilient responses through
an adversarial game-tree search process that takes into account an adversary’s action-effects on goals. Unlike
the current realisation of self-exploration that assumes goal independence, we propose a novel approach that
addresses goal inter-dependencies through agent coordination, ensuring more realistic and effective counter-
responses. We provide a correctness proof and evaluate the performance of our algorithm.
1 INTRODUCTION
Cyber attacks are becoming increasingly sophisti-
cated in recent years, causing significant damage
to businesses, organisations and critical infrastruc-
tures worldwide (IC3, 2023). To address this chal-
lenge, there is an urgent need for new methods and
techniques to develop systems that are increasingly
resilient to external attacks and disruptions. Self-
adaptation and self-management are two essential
properties for enhancing the resilience and flexibil-
ity of distributed software systems in complex, con-
tested environments, where an adversary can actively
reduce performance and impede general system op-
eration (Atighetchi and Pal, 2009; Baruwal Chhetri
et al., 2019; Linkov and Kott, 2019). These proper-
ties imply that a system is able to continuously moni-
tor its environment and adjust its structure, behaviour,
and configuration in response to changing conditions.
Self-adaptation and self-management can be re-
alised in various ways. One way is to design a sys-
tem as a collection of intelligent (AI-powered) soft-
ware agents that autonomously manage and adapt a
target (henceforth domain) system to maintain and
enhance performance (Tesauro et al., 2004; Weyns
and Georgeff, 2009; Florio, 2015; Baruwal Chhetri
et al., 2018; Uzunov et al., 2023). Compared to a
central agent managing the system, a multi-agent sys-
tem enhances robustness and fault tolerance by reduc-
ing the risk of a single point of failure. In a multi-
agent system, each agent is responsible for manag-
ing different parts or components of the domain sys-
tem, aiming to satisfy specific system requirements or
goals. In scenarios where goals are dependent, some
goal state configurations cannot coexist. Therefore,
agents must communicate and coordinate to achieve
their goals while avoiding conflicting configurations
(Ismail et al., 2018; Ponniah and Dantsker, 2022).
To be resilient in contested environments, the
aforementioned AI-powered agents must continually
reason ahead, consider adversaries’ actions and their
effects, and evaluate and deploy countermeasures to
achieve their system goals. Recent work (Hashmi
et al., 2022) has proposed a new property for self-
adaptive systems called self-exploration to describe
this capability. Inspired by the breakthrough perfor-
318
Hashmi, S. S., Dam, H. K., Colman, A., Uzunov, A. V., Vo, Q. B., Baruwal Chhetri, M. and Dorevski, J.
Coordinated Self-Exploration for Self-Adaptive Systems in Contested Environments.
DOI: 10.5220/0013140900003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 1, pages 318-332
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
mance of DeepMind’s AlphaGo (Silver et al., 2016),
self-exploration empowers agents to leverage adver-
sarial search to anticipate the potential effects of ad-
versarial attacks on the system and compute counter-
responses, ensuring system resilience. Each agent in-
dependently explores the possibility of achieving or
maintaining their assigned goal(s) in the face of ad-
versarial attacks.
However, the work by (Hashmi et al., 2022) has
a major limitation: it assumes independence between
system goals. This oversimplification does not reflect
real-world scenarios, where system goals are often
dependent. For example, providing accurate predic-
tions depends on the quality of the processed data.
Specifically, if the data is significantly compressed
and degraded, high accuracy in predictions cannot be
expected. The existing self-exploration approach fails
to account for such dependencies, potentially result-
ing in responses or actions that agents cannot collec-
tively perform to achieve their system goals.
In this paper, we aim to address this gap by consid-
ering the dependencies between system goals. We in-
troduce a new concept called incompatible goal state
into the self-exploration process to represent scenar-
ios where achieving one goal with certain quality at-
tribute values makes it impossible to achieve another
goal with contradictory quality attribute values. In
this paper, we focus on pairwise goal dependencies,
as it allows us to isolate the impact of one goal state
on another, enabling us to make precise adjustments.
In pairwise goal dependencies, all the incompatible
states in a system are broken down into incompatible
states between pairs of goals. We propose a novel,
coordinated approach to self-exploration in which
agents account for these incompatible goal states dur-
ing their self-exploration process. This ensures that
the responses agents compute are feasible for achiev-
ing system goals, even in the face of adversarial at-
tacks. Our approach to resolving incompatibilities in
goal pairs is a step towards a general solution involv-
ing more than two goals in an incompatibility rela-
tionship. We have developed a prototype implemen-
tation of our approach using Python, Docker
1
and Ze-
roMQ
2
. We formally prove the correctness of our ap-
proach, and also demonstrate its efficient performance
through a series of experiments.
The rest of the paper is organised as follows. In
Section 2, we present a motivating example for the
research problem. Section 3 provides an overview of
self-exploration concepts. In Section 4, we present
a rigorous problem formulation. Section 5 illustrates
the methodology underlying our proposed approach.
1
https://docker.com
2
https://zeromq.org
In Section 6, we summarise our distributed imple-
mentation, and in Section 7, we evaluate the perfor-
mance of our proposed approach. Finally, in Section
8, we discuss the related work, and in Section 9, we
offer some closing remarks.
2 MOTIVATING EXAMPLE
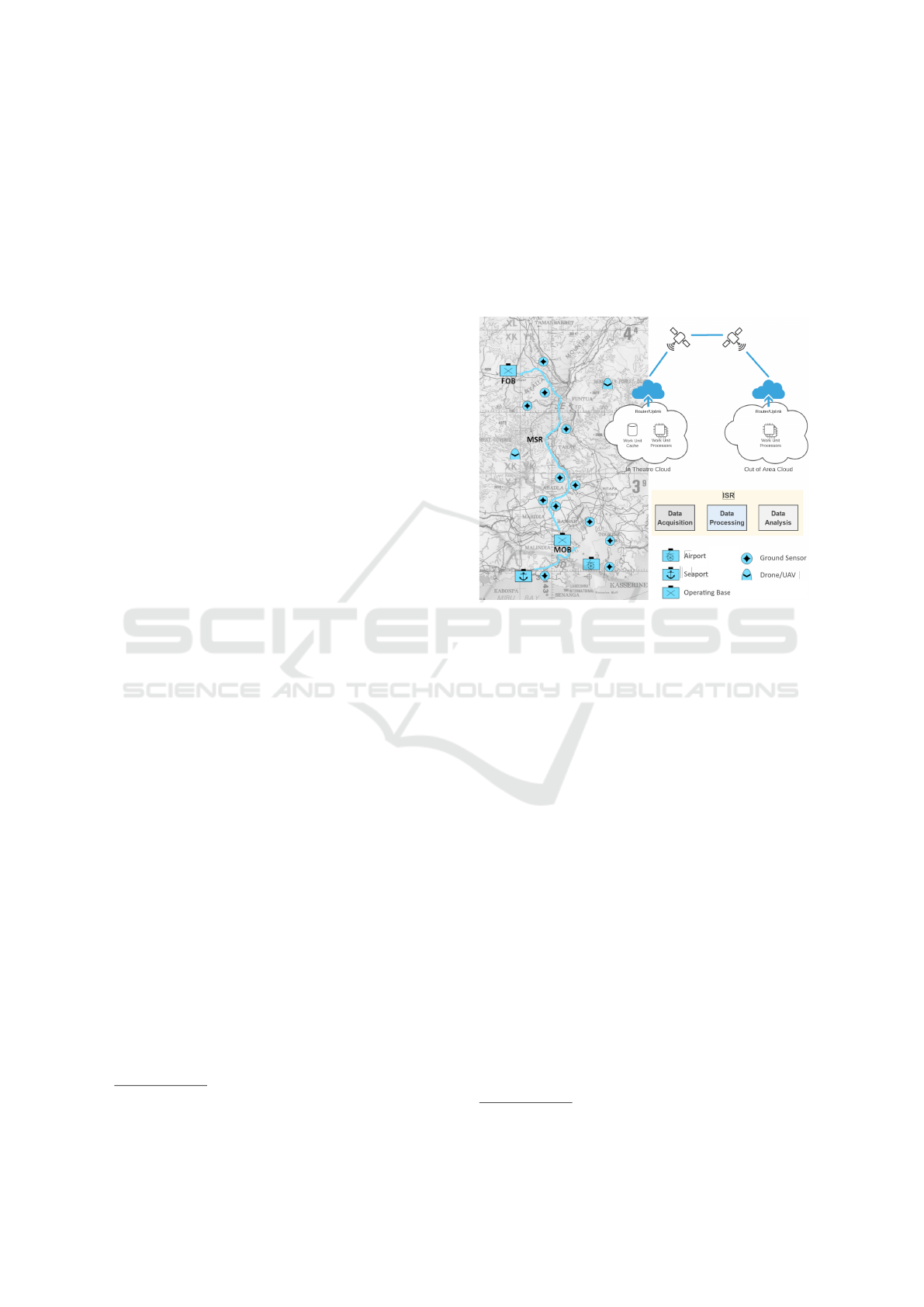
Figure 1: Overview of the ISR scenario along the main sup-
ply route (MSR) connecting the seaport and airport with
the main and forward operating bases (MOB and FOB)
3
.
Surveillance data is collected by ground sensors and UAVs.
This data is subsequently transmitted to cloud-based ser-
vices, where it undergoes further processing and analysis to
extract valuable insights.
In this section, we present a running scenario of a
cyber-physical system used for Intelligence, Surveil-
lance and Reconnaissance (ISR) activities along sup-
ply routes (see Figure 1). The system provides ser-
vices such as data acquisition, data processing, and
data analysis, each managed by separate agents. The
goals of the agents are to maintain the provisioning of
these services. Various sensors, including ground sen-
sors and surveillance drones, collect raw data along
these routes (Data Acquisition, DAQ). This raw data
undergoes various operations including (i) filtering to
remove irrelevant data or noise, such as glitches and
sensor malfunctions; (ii) aggregation to combine sim-
ilar data points, summarising large amounts of infor-
mation; and (iii) transformation to reformat the data
into a consistent and structured format, making it eas-
ier to analyse trends and patterns (Data Processing,
DP). The processed data is then analysed using various
statistical methods and machine learning algorithms
to identify anomalies, predict future events, and pro-
3
Adapted from (Hashmi et al., 2023).
Coordinated Self-Exploration for Self-Adaptive Systems in Contested Environments
319

vide real-time situational awareness (Data Analysis,
DA). This analysis informs decision-making by high-
lighting potential risks, opportunities, and areas re-
quiring further investigation.
Each of these services—data acquisition, data pro-
cessing, and data analysis—has critical attributes that
influence their successful achievement. For example,
the data acquisition service might be influenced by
coverage area and video resolution. The data process-
ing service has attributes such as compression ratio
and processing time. Additionally, the data analy-
sis service might be influenced by (classification) ac-
curacy and F1 score of the chosen algorithm(s) and
available computational resources.
In a contested environment, adversaries may dis-
rupt ISR services and affect their functionality and
quality through actions such as network flooding,
false data injection and jamming. In the event that an
adverse incident results in the degradation of a service
attribute, the managing agent has the capability to ex-
ecute actions that alter system attributes, thereby ame-
liorating the affected service attribute. For instance,
to enhance the video resolution of DAQ service, an
agent can allocate additional bandwidth, tweak sen-
sor range, or utilise a spare battery with higher battery
life. By reasoning ahead, an agent can compute the
most optimal action to take in a given circumstance.
While achieving these three services (or goals) is
crucial, their objectives can sometimes become in-
compatible. This inherent conflict is further amplified
when each service is managed by separate agents, cre-
ating challenges in ensuring the overall effectiveness
of the system. For example, a conflict may arise in the
following scenarios:
• Data Acquisition vs. Data Processing. In data
acquisition, capturing a large volume of data from
various sources ensures comprehensive coverage
of the operational area. However, this vast amount
of data can overwhelm processing capabilities,
leading to delays in handling critical events or
anomalies that require a real-time response. This
highlights the tradeoff between data comprehen-
siveness and processing speed.
• Data Processing vs. Data Analysis. Data pro-
cessing may involve applying data compression
techniques to reduce data size and complexity, en-
abling efficient storage and transmission. How-
ever, compression can introduce information loss,
potentially masking subtle features crucial for in-
depth analysis. Conversely, data analysis might
require high-fidelity, uncompressed data to extract
these fine-grained details.
These examples illustrate the inherent challenges
in managing a cyber-physical ISR system and the
need for an agent to reason ahead to compute the best
response in managing their service while avoiding
incompatibility with another managed service. Bal-
ancing the needs of data acquisition, processing, and
analysis requires careful consideration of their often-
conflicting goals. Finding strategies to manage these
incompatibilities is crucial for optimising the overall
effectiveness of the ISR system.
3 CONCEPTS IN
SELF-EXPLORATION
Self-exploration is a self-* property that enables
agents in a multi-agent system to compute optimal, re-
silient responses to adverse events through adversarial
search (lookahead with adversaries, as an extensive-
form game). Each agent uses self-exploration to iden-
tify the best action to take in the current situation to
achieve its goals, considering its capabilities, those of
its teammates, and the actions of adversaries. Some
actions may be infeasible, as they can transition the
system into an incompatible state (discussed in Sec-
tion IV). The focus of this paper is on collaboration
among agent-teammates such that they avoid reach-
ing an incompatible state during self-exploration. In
this subsection, we provide a somewhat more rigorous
(but not formal) definition of the key concepts used in
self-exploration.
3.1 Goals and Goal Models
Central to self-exploration are the concepts of goals
and goal models, which are defined as follows.
• Goal. Declarative representation of a system
requirement that must be satisfied (achieved or
maintained) (Franch et al., 2016). A goal can ei-
ther be a leaf goal (e.g., DAQ goal in Figure 2) or a
non-leaf goal
4
(e.g., ISR goal in Figure 2).
– Leaf Goal. Associated with a set of attributes
and conditions.
– Non-leaf Goal. Decomposed into one or more
sub-goals (e.g., ISR goal is decomposed into
DAQ, DP, and DA subgoals).
• Goal Attribute. Measurable or observable prop-
erty of the system that contributes to goal fulfil-
ment (e.g., accuracy in DA goal).
4
While we do not adhere to a particular goal modelling
framework (such as i∗, KAOS), we follow the generally ac-
cepted design of goal models as tree-like structures, where
higher-level goals are decomposed into lower-level goals
using AND/OR relationships (cf. (Uzunov et al., 2021)).
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
320
incompatible goal states
α / β goals incompatibility conditions
α DP DP.processing_time = VERY_LOW
β DAQ DAQ.coverage_area = VERY_HIGH and DAQ.video_resolution = VERY_HIGH
α DA DA.accuracy = VERY_HIGH
β DP DP.compression_ratio = VERY_HIGH
ISR
Data Acquisition (DAQ)
coverage_area
video_resolution
Data Processing (DP)
compression_ratio
processing_time
Data Analysis (DA)
accuracy
F1_score
AND
Goal Model
a2
a4a3
a1
agent goal
goal satisfaction conditions
ISR
DAQ and DP and DA
DAQ
DAQ.coverage_area > MEDIUM and DAQ.video_resolution > MEDIUM_HIGH
DP
DP.compression_ratio > MEDIUM and DP.processing_time < MEDIUM_LOW
DA
DA.accuracy > MEDIUM_HIGH and DA.F1_score > MEDIUM_HIGH
goal failure conditions
DAQ
DAQ.coverage_area < MEDIUM_LOW and DAQ.video_resolution < MEDIUM_LOW
DP
DP.compression_ratio < MEDIUM_LOW and DP.processing_time > MEDIUM_HIGH
DA
DA.accuracy < MEDIUM and DA.F1_score < MEDIUM_LOW
agents
a3
a2
a4, a5
a3
a5
Figure 2: Goal Model of the ISR scenario.
• Goal Condition. Establishes criteria for the value
of a goal attribute that must be met for the goal
to be considered satisfied or failed (e.g., if both
DA.accuracy and DA.F1 score is greater than
MEDIUM HIGH, then the DA goal will be satisfied).
• Subgoal. A more specific goal that contributes to
the satisfaction (or failure) of the given goal (e.g.,
ISR is satisfied if the subgoals DAQ, DP, and DA are
satisfied).
• Goal State. Defined by the values of the goal at-
tributes at a given time. The goal state indicates
the satisfaction status of a goal (e.g., if at a given
timestamp, both DA.accuracy and DA.F1 score
are VERY HIGH, then DA is deemed to be satisfied
in that goal state).
• Goal Model. Structured representation of the re-
quirements in a system comprising goals, goal
attributes, subgoals, goal conditions, and agents
(Van Lamsweerde, 2001).
• Root Goal. The highest-level goal within a goal
model (e.g., ISR goal in Figure 2).
Figure 2 illustrates the goal model for the ISR sce-
nario from the motivating example (see Section 2),
showing the goal decomposition of the ISR goal into
DAQ, DP, and DA subgoals, along with their respective
satisfaction and failure conditions. Additionally, it
identifies the agents that can manage each goal based
on their specific capabilities. Incompatibility condi-
tions, indicated at the bottom of Figure 2, are dis-
cussed in Section 4.2.
3.2 Self-Exploration and Game Trees
Self-exploration consists of two parts: (i) global and
(ii) local. Global self-exploration manages inter-
actions between agents and is initiated by the root
agent, i.e., the agent handling the root goal (e.g., a1 in
Figure 2). Local self-exploration identifies the best
action(s) for a given agent at the current state of a leaf
goal. It combines the precision of a tree search with
the power of statistical sampling to evaluate the po-
tential outcomes of different actions.
To satisfy the root goal, its subgoals must be sat-
isfied. A leaf goal can be managed by one or more
agents (e.g., the DA goal can be managed by either
a4 or a5). These agents are called the candidate
agents for that goal. When an agent comes across a
subgoal that it cannot handle (e.g., due to lacking re-
quired capabilities), it sends a delegation request for
the subgoal to its candidate agents (e.g., a1 sends a
delegation request for DAQ to a2). The agent send-
ing the delegation request (e.g., a1) is called a dele-
gator, and the agent receiving the request (e.g., a2) is
called a delegatee. Once a candidate agent receives
a delegation request for a leaf goal, it performs local
self-exploration. It then returns the output (covered
in the next sub-section) to the delegator agent. The
delegator agent receives the output from all the can-
didate agents and identifies the most suitable/capable
agent for a given goal to establish a contract. A con-
tract is a relationship between two agents that speci-
fies the responsibility of one agent towards the other
in achieving/maintaining a goal (e.g., a1 establishes a
contract with a2 for DAQ).
As indicated in the previous sub-section, agents
are responsible for achieving or maintaining one or
more goals, which are adopted at runtime. Dur-
ing self-exploration, these agents construct individ-
ual, goal-based game trees. These trees are graphs
that project each agent’s future goal states, resulting
from their own planned actions or those anticipated
from adversaries Specifically, a node in a game tree
represents the collective state of all goals of an agent
(e.g., a node in the game tree, generated by a2, repre-
sents the state of DAQ). Therefore, a node is defined by
the values of an agent’s goal attributes. If an agent is
responsible for only one goal, then the node is equiva-
lent to a goal state. As the number of nodes increases
exponentially with each depth of the game tree, the
unlikely branches need to be pruned to improve the
Coordinated Self-Exploration for Self-Adaptive Systems in Contested Environments
321

efficiency of the adversarial search (Hashmi et al.,
2025). If an agent is responsible for only one goal,
then the node is equivalent to a goal state. An edge
in a game tree represents a goal state transition, oc-
curring sequentially through an agent’s action in one
round followed by an adversary’s action in the next
round. The action space of an agent represents the
combination of all the actions that an agent can per-
form. An effect is a node (or goal state) that is reached
as an outcome of an agent or adversary’s action (e.g.,
a2’s action that increases the video resolution to a spe-
cific value is an edge, and the node representing the
increased video resolution value is an effect of that
action). The effect space of a given node is the set of
all possible nodes that can be reached from that node.
3.3 Key Elements of Local
Self-Exploration
Local self-exploration is based on Monte Carlo
Tree Search (MCTS) (Kocsis and Szepesv
´
ari, 2006),
which consists of four phases:
• Selection. The tree is traversed from the root node
(representing the current state of the system) to a
leaf node (e.g., a2 traverses the tree from the cur-
rent state of DAQ to the leaf node of the explored
tree). All nodes except the root represent future
states.
• Expansion. The tree is expanded by a single
depth at the leaf node via generation of succes-
sor (or child) nodes (e.g., a2 expands the tree by
generating all possible states that can be reached
by a2 through its action space at the leaf node).
• Simulation (or Rollout). A simulation or roll-
out is performed from the leaf node to a terminal
node i.e., a node where an agent wins, loses, or
a cut-off depth is reached. Simulations are per-
formed to evaluate potential future states by esti-
mating the outcomes (wins, losses) from the leaf
node. A win occurs at the node where the goal is
satisfied (e.g., if DAQ.coverage area > MEDIUM
and DAQ.video resolution > MEDIUM HIGH,
then DAQ is satisfied at that state and it is consid-
ered a win). A loss occurs when the failure con-
dition of the goal is true. The cut-off depth d is
reached if by depth d (i) the goal remains unsatis-
fied and (ii) no failure conditions are met.
• Backpropagation. The evaluation of the termi-
nal node (along with the visit count of the node) is
backpropagated to the root node to reflect the new
information gained from the simulation. By ag-
gregating evaluations from multiple simulations,
the tree builds a more accurate statistical repre-
sentation of the expected outcomes from different
states and actions. This guides the selection phase
in future iterations by directing the search towards
the most promising nodes (e.g., future iterations
by a2 leads the search towards states where DAQ is
satisfied).
These four phases are repeated for each new sim-
ulation, building a more accurate statistical represen-
tation of expected outcomes and guiding the search
towards the most promising nodes.
In local self-exploration, an agent operates with a
specific reasoning budget (e.g., a fixed number of sim-
ulations or simulation time). Once the reasoning bud-
get is exhausted, the node at depth 1 with the highest
visit count is determined as the (transitioning state),
indicating the most suitable node to transition to. The
edge leading to this node represents the agent’s most
optimal action. Additionally, the agent’s root node
accumulates the sum of evaluations for all the sim-
ulations. This sum, divided by the total number of
simulations, yields the agent’s win ratio. The win
ratio serves as a measure of the agent’s utility in ad-
verse conditions and is returned to the delegator agent
upon completion of local self-exploration. In scenar-
ios where multiple agents are capable of handling a
goal, the win ratio acts as the determining factor for
the selection of the most capable agent.
4 PROBLEM FORMULATION
Previous work on self-exploration (Hashmi et al.,
2022; Hashmi et al., 2023), simplifies the problem
by assuming that each goal operates independently
from other goals. However, this assumption does not
reflect real-world scenarios where goals can be de-
pendent. Understanding these dependencies is cru-
cial as they can significantly impact how agents per-
form self-exploration. In this work, we examine
how self-exploration can be performed when goals
have dependencies. Dependencies between goals can
manifest in various forms, such as temporal depen-
dencies where one goal must be satisfied before an-
other, or resource dependencies, where agents as-
signed to different goals share a common resource.
In this paper, we specifically focus on incompati-
ble goal states as an illustrative example of goal de-
pendencies. In this context, the ability to reach a
particular goal state (e.g., DP.compression ratio =
VERY HIGH and DP.processing time = LOW) is de-
pendent on the state of another goal (e.g., DA). In our
scenario, these dependencies between goal states, and
potential incompatibilities, arise because there are in-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
322

put/output performance dependencies between agents
in a data processing pipeline. Our work, however, can
be extended to other types of goal dependencies too.
4.1 Incompatible Goal States
As discussed previously, a goal state is defined by
specific attribute values. Incompatible goal states
between two goals are states that cannot co-exist
within the system. They represent situations where
achieving one goal with its particular attribute values
makes it impossible to achieve another goal with spe-
cific attribute values, simultaneously. For example,
a goal state of Data Processing with a VERY HIGH
compression ratio is incompatible with a goal state
of Data Analysis with a VERY HIGH accuracy, as high
compression ratio lowers the data fidelity, thereby de-
grading the classification accuracy of objects in the
compressed sensor data. Similarly, a goal state of
Data Acquisition with a VERY HIGH video resolution
and a VERY HIGH coverage area is incompatible with
a goal state of Data Processing with a VERY LOW pro-
cessing time. In the next sub-section, we discuss the
classification of goals, which helps determine priority
among goal states and resolves incompatibilities.
4.2 Goal Classification
To understand how goal dependencies manifest as in-
compatible states, we define three categories of goals
based on their involvement in incompatible states. In
a pair of incompatible goal states, the goal with prior-
ity is called an α
α
α goal, while the non-priority goal is
called the β
β
β goal. The incompatibility conditions as-
sociated with an α goal and a β goal are called the α
condition and the β condition, respectively. An α goal
can transition to any state regardless of whether the
α condition is true or false in the transitioning state.
In contrast, there are restrictions on the transitioning
state for a β goal. A β goal can transition to a state
where the (i) β condition is false, or the (ii) β condi-
tion is true but the α condition for an α goal’s transi-
tioning state is false.
Furthermore, in the collection of all the pairs of
incompatible goal states, a goal can either be A , B , or
A
B.
• A goal is classified as A if it appears as an α goal
in one or more pairs of incompatible goal states
and none as a β goal.
• A goal is classified as B if it appears as a β goal in
one or more pairs of incompatible goal states and
none as an α goal.
• A goal is classified as A B if it appears as an α
goal in one or more pairs of incompatible goal
states and as a β goal in one or more pairs as well.
In Figure 2, DA, DAQ, and DP serve as examples of A,
B, and A B goals, respectively. A pair of states are
deemed incompatible if and only if the α condition is
true in one state and the corresponding β condition is
true in the other state.
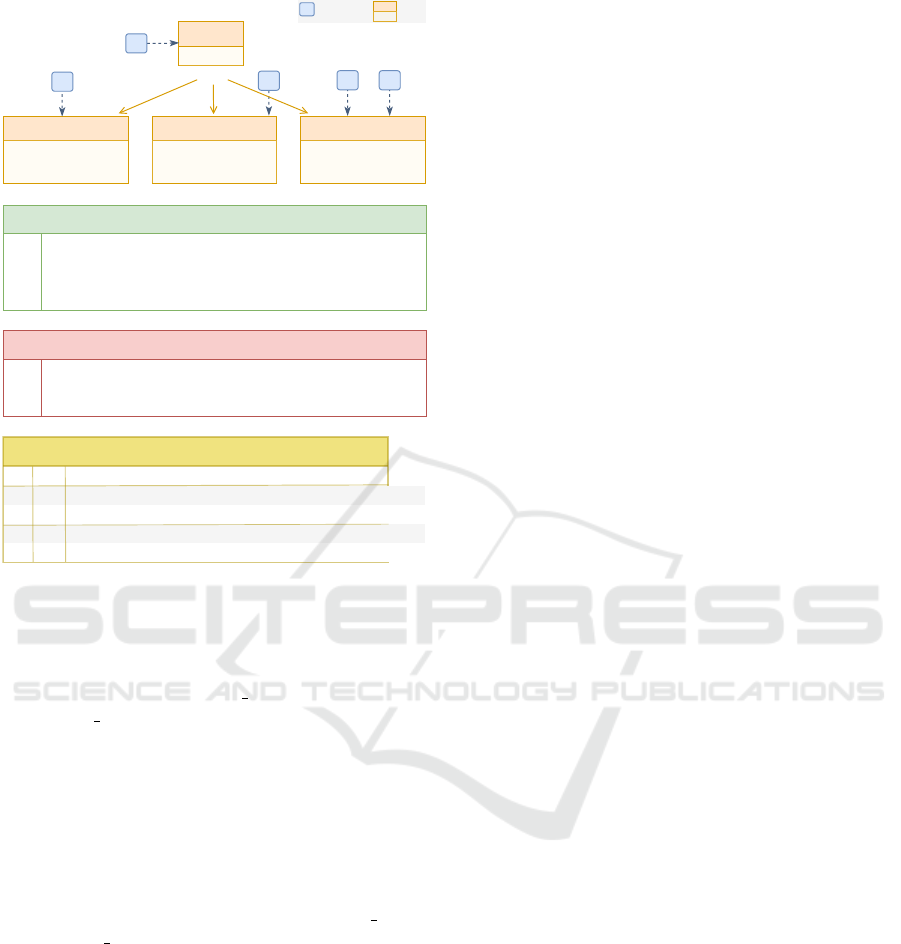
4.3 Agent Awareness of Incompatible
Goal States
We assume that the agents have partial observability
of the system they are managing. In our approach,
each delegator agent has knowledge of the incom-
patible goal state for the immediate sub-goals. This
implies that the delegator understands how the goals
it delegates might conflict. For example, in Figure
3, a1 knows the incompatible goal states for sub-
goals g2 and g3, while a6 knows those for g9, g10
and g11. Because an agent can have multiple can-
didate agents, and each agent can have a unique best-
transitioning state, this implies that some of the candi-
date agents for an α goal can have a best-transitioning
state where the α condition is true, whereas other can-
didate agents’ best-transitioning state can have α con-
dition false. If the candidate agents for the α goals di-
rectly communicate with the candidate agents for the
β goals, the latter can receive conflicting communi-
cations regarding whether the α condition is true or
not. Therefore, in our approach, the communication
only happens between the delegator and the delegatee
agents, and the best-transitioning state for each agent
is identified by the delegator after it has identified the
best candidate agent for each subgoal based on the
win ratios received from the candidate agents. In Fig-
a1 g1
g2
g3 g4
a2 a4
a5
g5 g6 g7
g9 g10 g11
a7 a8
a11 a12a10 a13 a14
a3
a6
goal
agent
subgoal can manage
incompatibilities
resolved by:
a1
a5
a6
g8
a9
g12 g13
a16a15
a9
AND
AND
OR
OR
AND
Figure 3: An illustrative goal model of depth 3, with shaded
regions representing the knowledge of the delegator agents
(bold outline) and their communication with the delegatee
agents to resolve incompatible goal states.
Coordinated Self-Exploration for Self-Adaptive Systems in Contested Environments
323
ACC = M
F1 = M
H
ACC = MH
F1 = M
ACC = M
F1 = VL
ACC = M
F1 = L
increase
F1
ACC = H
F1 = M
increase
ACC
MH
VL L
VH
ACC = VH
F1 = M
9/13 7/11
0/3
8/12
4/8
DPa3 DA
DAQ
a4 a5a2
DA
a1
delegator delegatee
send win ratio and top k states
delegate sub-goal and k
send contract and best state
1
2
3
4
contract established
32/50
29/50
28/50
26/50
ACC = M
F1 = ML
ML
0/3
a4's reasoning for DA
28/50
agent goal contract established goal state
ISR
local self-exploration
C.R. = M
P.T. = M
H
C.R.= MH
P.T.=M
C.R.= M
P.T.= VL
C.R.= M
P.T.= L
reduce
P.T.
C.R.= H
P.T.= M
increase
C.R.
MH
VL L
attribute values
Very High (VH) High (H) Medium High (MH) Medium (M)
Medium Low (ML) Low (L) Very Low (VL)
VH
C.R.= VH
P.T.= M
8/12 6/10
1/4
7/11
6/9
C.R.= M
P.T.= ML
ML
1/4
a3's reasoning for DP
29/50
best compatible state
(returned from the delegator agent)
attribute names
compression_ratio (C.R.) processing_time (P.T.)
accuracy (ACC) F1_score (F1)
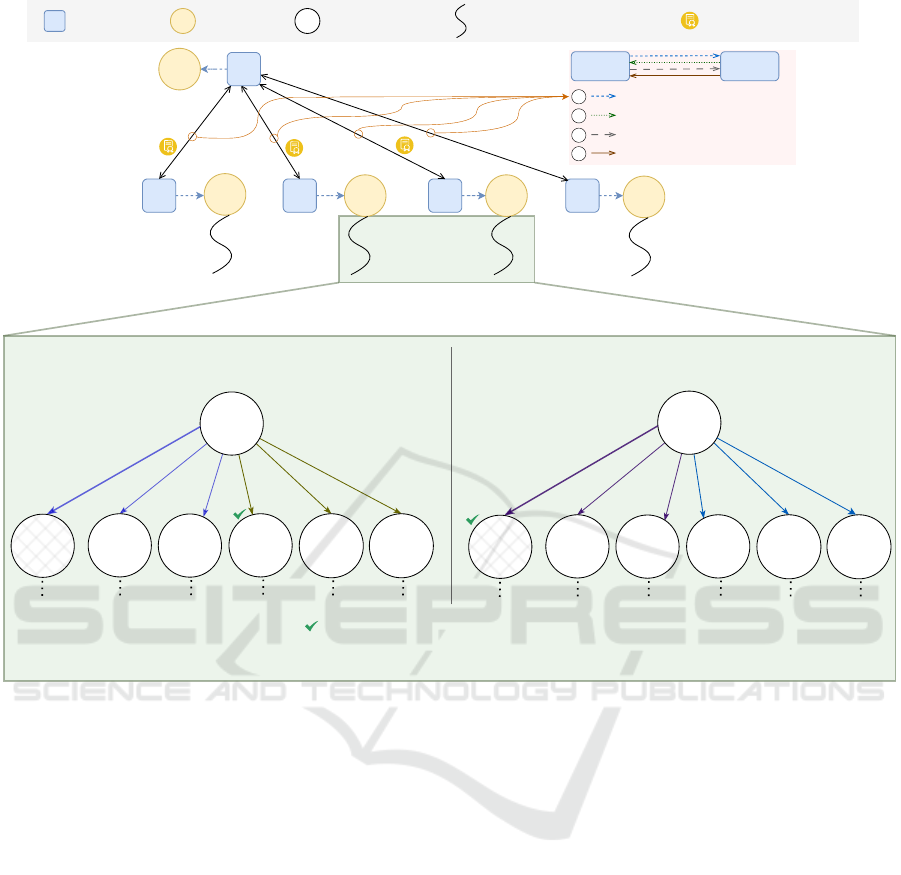
Figure 4: Overview of coordinated self-exploration w.r.t. ISR scenario. The four communication exchanges between the
delegator and the delegatee agents are shown in the top-right corner. Agent a1 is the delegator, while the rest of the agents are
delegatees. The local self-exploration of agents a4 and a3 is enlarged at the bottom of the figure. For simplicity, only depth 1
of the game trees are shown. The fractions written on top of the goal states represent the win ratios of simulations that pass
through those states. The most visited branch is highlighted in bold. Cross-hatched states indicate incompatible states. In
scenarios where the most visited state (in the simulations) is incompatible, the next most visited state is chosen as the best
compatible state by the delegator agent.
ure 3, a7 and a8 communicate solely with a5, which
identifies their best-transitioning states. We further
assume that the actions of the agents are determin-
istic, i.e., given the current goal state, an agent can
determine what the resultant goal state will be after
performing a specific action.
5 COORDINATED
SELF-EXPLORATION
In global self-exploration, a delegator agent delegates
a subgoal to all the candidate agents for that subgoal.
If the subgoal is a leaf goal, the candidate agents per-
form local self-exploration on it to obtain the most
optimal action. Unlike scenarios where goals are in-
dependent and a candidate agent only reports the win
ratio after simulations, here a candidate agent also co-
ordinates with the delegator agent by sending the win
ratio and the top-k ranked goal states based on the
number of visits during simulations. The delegator
agent then (i) selects the best candidate agent for each
subgoal based on the win ratios, and (ii) selects the
best state for each of the chosen candidate agents. For
(ii), because the delegator agent has knowledge of the
incompatible goal states, it selects the highest ranked
goal state (from the top-k) that does not have any in-
compatibility with the selected goal states of the other
goals. The delegator agent then establishes a contract
with the best candidate agent for each subgoal and
returns the best (among k) goal states back to the con-
tracted agents. The best goal states are those that have
the highest utility and no incompatibilities.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
324

We illustrate our approach in Figure 4. There are
four communication exchanges between a delegator
and a delegatee agent. First, the delegator agent dele-
gates the subgoal and k (number of top states to con-
sider) to the delegatee agent. Second, the delegatee
agent returns the win ratio from local self-exploration
and the top-k states to the delegator agent. Third, the
delegator agent sends the contract and the best com-
patible state to the chosen delegatee agent for each
subgoal. Finally, the delegatee agent acknowledges
the receipt of contract and best state, and the contract
between the delegator and delegatee agent is estab-
lished. In Figure 4, agents a2, a3, a4, and a5 perform
local self-exploration on the subgoals of ISR goal. For
DA goal, a1 establishes contract with a4 instead of a5
due to the higher win ratio. For a3, the top ranked
state is an incompatible state, because DP is the β goal
and DA is an α goal (see Figure 2), and the α condition
is true in the top ranked state of DA. Hence, a1 selects
the next ranked state (based on the visit count) for DP
where DP.processing time is reduced to VERY LOW.
Furthermore, to enhance scalability, our approach
is based on parallel reasoning, i.e., candidate agents
for multiple goals can perform self-exploration si-
multaneously. This implies that there is an overlap
in the self-exploration timestamps between candidate
agents of various goals, allowing concurrent reason-
ing processes.
5.1 Coordinated Self-Exploration
Algorithm
We develop our algorithm based on the following as-
sumptions:
• In our simulation of DAQ, DP, and DA services
within the ISR scenario, we assume that sensors
and all the potential connections, including those
between sensors and the DAQ system, the DAQ sys-
tem and DP units, DP units and DA systems, and DA
systems and user interfaces, are operating without
faults or malfunctions to mitigate external validity
threats.
• In coordinated self-exploration, an agent handling
a goal G communicates only with agents capa-
ble of handling the subgoals of G (delegating sub-
goals of G to the candidate agents) or the parent
goal of G (sending win ratio of G). We assume
that the incompatibility exists only between goals
that are at the same depth and share the parent
goal, i.e., both goals are immediate subgoals of
the same parent goal.
• A circular dependency exists if a goal has no A
and B subgoals, and all the subgoals are A B .
goal subgoal incompatible statesagent can manage
(a) incompatibility
at same depth
(b) incompatibility at
different depths
(c) circular dependency
Figure 5: (a) Incompatibility between goals that are at the
same depth. (b) Incompatibility between goals that are at
different depths. (c) Circular dependency between goals
implying that there are only A B (sub) goals. In the incom-
patible states symbol, the arrow head points to the β goal.
This implies that each subgoal is an α goal for one
pair of incompatible states and a β goal for an-
other pair of incompatible states. Consequently,
the selection of the best-transitioning state for
each subgoal depends on the selection of the best-
transitioning state for another subgoal. Therefore,
we assume that there is no circular dependency in
the goal model.
In a circular dependency, each goal’s involvement
in multiple incompatibility relationships means that
changing its best state can affect the compatibility of
other relationships. In Figure 5, only the goal model
in (a) aligns with our assumptions, while models like
(b) and (c) are excluded from our approach.
The agent handling the root goal initiates global
self-exploration with the knowledge of incompatible
goal states for the subgoals and the number of top
transitioning states (k) to request from each delega-
tee agent (line 1, Algorithm 1). The results vari-
able will store a list of tuples containing the output
of each local self-exploration for the immediate sub-
goals of goal (line 2). The best agents variable will
store a list of tuples containing the win ratios for the
best agents for each (immediate) subgoal. A safety
check (lines 4-6) is triggered if an agent encounters a
goal and is not among the candidate agents. In lines
7-9, agent performs local self-exploration and sends
the output to the delegator agent, where the delega-
tor agent populates its results variable. In lines 10-17,
agent iterates through each subgoal of goal and dele-
gates the subgoal to each candidate agent of subgoal.
The output of self-exploration is then appended to the
results in the delegator agent. By line 18, the delega-
tor agent has received the win ratios from all the del-
egatee agents, and the delegator agent therefore starts
identifying the best candidate agent for each subgoal
based on the highest win ratios (lines 18-20). The
best (compatible) states for each subgoal are identi-
fied via the function call of ident
states() in line 21.
This function is elaborated in Algorithm 2. Finally,
Coordinated Self-Exploration for Self-Adaptive Systems in Contested Environments
325

Algorithm 1: Coordinated Self-Exploration.
1 Procedure self exp(goal, agent, k)
2 results ← list of tuples // format: (goal, agent, win-ratio, [k
states])
3 best agents ← list of tuples // format: (goal, agent,
win-ratio)
4 if agent /∈ get candidate agents(goal) then
5 return ∅,∅
6 end
7 if goal.subgoals = ∅ then
8 winRatio,topK ← self exp local(goal,agent,k)
9 results.append(goal,agent, winRatio,topK)
10 else
/* goal is a non-leaf goal */
11 foreach subgoal ∈ goal.subgoals do
12 foreach
cand agent ∈ get candidate agents(subgoal)
do
/* delegating subgoal to candidate agent */
13 winRatio,topK ← self exp(subgoal,
cand agent,k)
14 results.append(subgoal,cand agent,
winRatio,topK)
15 end
16 end
17 end
/* identifying best agents for each subgoal */
18 foreach unique subgoal ∈ 1
st
col. of results do
19 best agents.append(subgoal,cand agent,win ratio)
where cand agent has highest win ratio for subgoal
20 end
/* identifying best compatible transitioning state for each
agent in best agents */
21 best states ←
ident states(agent,results, best agents,goal.incomp states,k)
/* root agent initiates establishing contracts with each agent
in best agents */
22 if agent is root agent then
23 establish contracts(agent, best states)
24 end
the root agent initiates the process of sending con-
tracts and the best state to the best agent for each
subgoal (lines 22-24). The value of the best states
variable is obtained from Algorithm 2, and it contains
the required information. The process of establish-
ing contracts continues in a top-down fashion until the
contracts (and the best-transitioning state) for the leaf
goals have been sent.
The ident states() is passed the results,
best agents, and k from Algorithm 1, along with the
incompatibility states (line 1, Algorithm 2). The data
structure of incomp states is a list of dictionaries
where each dictionary has four keys, namely, α goal,
α condition, β goal, and β condition (see Figure
2). The best states variable will store a dictionary
of keys and values, where each key corresponds
to a delegatee agent and value corresponds to the
best-transitioning state for that delegatee agent (line
2). The get agents() function on line 4 returns the
agents that are candidate agents for the subgoal and
where the subgoal is an α goal in the incompatibility
states. In lines 6-8, best states are identified for
the subgoals that do not have incompatibility with
any goal. The get state(results, subgoal,agent, k, 1)
function on line 7 returns a state from results where
Algorithm 2: Identify the best-transitioning state.
1 Procedure ident states(agent, results, best agents,
incomp states, k)
2 best states ← dictionary with keys and values // agent:state
3 foreach subgoal,agent in 1
st
,2
nd
cols. of best agents do
4 α agents ← get agents(α,subgoal, incomp states)
5 β agents ← get agents(β,subgoal, incomp states)
// selection of states for leaf goals other than A and B
6 if α agents = ∅ and β agents = ∅ and
subgoal.subgoals = ∅ then
/* get highest ranking (1) state from results */
7 best states[agent] ←
get state(results, subgoal,agent,k,1)
8 end
/* selection of states for A goals */
9 if agent ∈ α agents and agent /∈ β agents then
10 best states[agent] ←
get state(results, subgoal,agent,k,1)
11 end
12 end
/* selection of states for A B goals */
13 foreach subgoal,agent in 1
st
,2
nd
cols. of best agents do
14 α agents ← get agents(α,subgoal, incomp states)
15 β agents ← get agents(β,subgoal, incomp states)
16 if agent ∈ α agents and agent ∈ β agents then
17 other α agent ← ∅
18 foreach α agent ∈ get α agents(subgoal) do
19 if α agent ∈ 2
nd
col. of best agents then
20 other α agent ← α agent
21 end
22 end
23 α goal ← get α goal(subgoal)
24 α cond ← get condition(α, α goal,subgoal)
25 β cond ← get condition(β, α goal,subgoal)
26 top rank ← 1 // top rank without incompatibility
/* condition for incompatibility */
27 while top rank ≤ k and β cond is True in
get state(results, subgoal,agent, k, top rank)
and ((other α agent ∈ best states and α cond
is True in best states[other α agent]) or
(other α agent /∈ best states and α cond is
True in
get state(results, α goal, other α agent, k, top rank)))
do
28 top rank ← top rank + 1
29 end
30 best states[agent] ←
get state(results, subgoal,agent, k, top rank)
31 end
32 end
/* selection of states for B goals */
33 foreach subgoal,agent in 1
st
,2
nd
cols. of best agents do
34 α agents ← get agents(α,subgoal, incomp states)
35 α goal ← get α goal(subgoal)
36 β agents ← get agents(β,subgoal, incomp states)
37 if α agents = ∅ and agent ∈ β agents then
38 other α agent ← ∅
39 foreach α agent ∈ get α agents(subgoal) do
40 if α agent ∈ 2
nd
col. of best agents then
41 other α agent ← α agent
42 end
43 end
44 α cond ← get condition(α, α goal,subgoal)
45 β cond ← get condition(β, α goal,subgoal)
46 top rank ← 1
/* condition for incompatibility */
47 while top rank ≤ k and β cond is True in
get state(results, subgoal,agent, k, top rank)
and α cond is True in best states[α agent] do
48 top rank ← top rank + 1
49 end
50 best states[agent] ←
get state(results, subgoal,agent, k, top rank)
51 end
52 end
53 return best states
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
326

the goal and agent match with subgoal and agent,
respectively, and the state to be fetched (among the
k states) has a rank of 1. In lines 9-11, the best
states are identified for the A subgoals. The rationale
for identifying the best states of A subgoals is that
once the best states for the A B (or B ) subgoals
are being computed, we already know whether the
α condition is true in the best states of A subgoals
and subsequently, decide whether the states of A B
(or B) subgoals where β condition is true should be
avoided or considered.
In lines 13-32, we compute the best states for
the A B subgoals. The conditional on line 16 is
true for only an A B goal. In lines 17-22, we iden-
tify the best agent (other α agent) for the α goal,
from an entry in incomp states where the β goal
is subgoal. Note that because subgoal is an A B
goal, it will appear as both α and β in incomp states.
The function get α agents(subgoal) on line 18 re-
turns a list of candidate agents for the α goal in
incomp states where the β goal is subgoal. The
get α goal(subgoal) on line 23 fetches the α goal
from incomp states where the β goal is subgoal. The
get condition(α, α goal, subgoal) on line 24 returns
the α condition from incomp states where the α goal
is α goal and the β goal is subgoal. The while loop
condition on line 27 checks for incompatibility, and
increments the top rank if the incompatibility condi-
tion is true (line 28).
In lines 33-52, we compute the best states for the
B subgoals. The conditional on line 37 is true for only
a B goal. The while loop condition on line 47 checks
for incompatibility, and increments the top rank if
the incompatibility condition is true (line 48). The
get state(results,subgoal,agent, k, top rank) function
returns a state from results with rank of top rank
provided that top rank ≤ k, else it returns null.
In situations where all the top-k ranked states are
incompatible, then the value of top rank will be
k + 1 at the end of the while loop on line 49,
and get state(results,subgoal,agent,k,top rank) re-
turns null on line 50. Finally, the dictionary of
best states is returned on line 53.
5.2 Correctness Proof
To prove the correctness of our approach, we show
that goal states (i.e., best states) returned (line 53 in
Algorithm 2) do not contain incompatible goal states.
Note that best states contains the best goal state
recommended for each individual delegated agent,
stored in variable best states[agent]. This is updated
on lines 7, 10, 30 and 50 of Algorithm 2. On
lines 7 and 10, since the A B and B goals have not
yet been considered for the selection of best states,
get state(results,subgoal,agent, k, 1) always return
compatible goal states. Hence, we only need to show
that get state(results,subgoal, agent,k,top rank) re-
turns compatible goal states at lines 30 and 50.
We prove this by contradiction. Let us
assume that in line 30 (or line 50) top rank
= j and an incompatible state is returned by
get state(results,subgoal,agent, k, j).
Given this assumption, the while loop condition in
line 27 (or line 47) should be false for top rank = j.
Let us examine the while loop condition in line 27.
This condition (denoted as C) can be broken down
into sub-conditions as follows:
• C
1
← j ≤ k
• C
2
← β cond is True in get state(results,subgoal,
agent,k,j)
• C
3
← other α agent ∈ best states
• C
4
← α cond is True in
best states[other α agent]
• C
5
← other α agent /∈ best states
• C
6
← α cond is True in get state(results, α goal,
other α agent, k, 1)
Then, C can be expressed as:
C ← C
1
and C
2
and ((C
3
and C
4
) or (C
5
and C
6
))
Therefore, for C to be evaluated as false, one of
the following must hold:
• (i) Either C
1
or C
2
should be false, or
• (ii) Either C
3
or C
4
should be false, and either C
5
or C
6
should be false.
For (i), since j ≤ k is always true, C
1
cannot be
false. Besides, in a pair of incompatible states, the β
condition must be true, therefore, C
2
cannot be false.
For (ii), C
3
and C
5
are complementary, i.e., C
3
=
¬C
5
. This implies that both C
3
and C
5
cannot be false.
If C
5
is false, then C
3
is true. In a pair of incompatible
states, the α condition must be true, and therefore, C
4
must also be true. If C
3
is false, then C
5
is true, and to
suffice the incompatibility requirement of Definition
1, the alpha condition must be true, and therefore, C
6
must also be true. Therefore, it is impossible for the
conditions in (ii) to hold given the above assumption.
Since we cannot satisfy either (i) or (ii), C
cannot be evaluated as false for top rank equals
j. This contradicts our assumption. There-
fore, we conclude that in line 30 (or line 50
5
)
get state(results,subgoal,agent, k, j) cannot return an
incompatible state. Hence, our algorithm is correct as
it always returns compatible goal states.
5
The proof is similar to what we have shown for line 30.
Coordinated Self-Exploration for Self-Adaptive Systems in Contested Environments
327

6 IMPLEMENTATION
In this section, we outline the Proof of Concept (PoC)
application created to evaluate our coordinated self-
exploration algorithm in an asynchronous environ-
ment, where each agent is provided with a subset of
the input akin to a partially-observable environment.
We implement the self-exploration algorithm pro-
posed in section 5 in self-contained agents (Python
objects), which are individually containerised using
Docker. Docker was chosen as it provides light-
weight, isolated environments which are ideal for
modelling distributed agent communication on a sin-
gle host machine. Furthermore, Docker’s Python
SDK provides a programmatic interface suitable for
building a test-bed that allowed us to swiftly test a
large range of agent and goal permutations against the
self-exploration algorithm.
To facilitate communication between the isolated
Docker containers, ZeroMQ (an embedded network-
ing library) was used to build an agent-to-agent mes-
saging interface. We used ZeroMQ for agents to issue
commands to each other, and to send the output of
self-exploration to the delegator agent. ZeroMQ was
chosen for its unique ability to function similarly to
a traditional message queue service – but without the
need for a centralised message broker that would oth-
erwise be used to route messages to the intended re-
cipient(s) – and also for its resilience features, such as
dead letter queuing (DLQ). Our ZeroMQ-based dis-
tributed architecture allows us to mirror the commu-
nications real-world agents would undertake over a
network, within a single host.
Through the use of Python’s threading API and
ZeroMQ’s router sockets, the Docker containers em-
ploy data parallelism to run multiple instances of the
self-exploration algorithm across threads, allowing an
agent to process many goals at any point in time,
without halting. To ensure that messages are routed
to the appropriate thread, an identity frame (Hintjens
et al., 2013) is prepended to messages, allowing the
ZeroMQ router socket to forward the message to the
intended recipient thread. This significantly reduces
the execution time compared to a synchronous PoC
implementation.
7 PERFORMANCE EVALUATION
In this section, we evaluate our algorithm’s perfor-
mance by measuring (i) reasoning time and (ii) the
number of communication messages sent by agents,
across a diverse range of goals and agents.
7.1 Experimental Settings
We measure the reasoning time as the total dura-
tion (in seconds) from the commencement of self-
exploration by the root agent until the contracts have
been established with all the required agents and they
have been provided with the best state to transition
to. We run the experiments with multiple input files,
varying the number of goals and agents. The number
of goals is increased in multiples of 4, up to a maxi-
mum of 48. The average branching factor for non-leaf
goals in the input goal models is 4.7 (maximum is 6
and minimum is 3). Non-leaf goals can be decom-
posed into AND/OR subgoals, with a maximum of 3
subgoals for each type. In a type, when all three are
leaf subgoals, they are divided into A, B , and A B ,
each. For two leaf subgoals, they are divided into A
and B. The depth of the goal models varies from 1
to 3. The number of candidate agents per leaf goal
varies from one to four, while each non-leaf goal is
assigned a single agent. Each leaf goal has two at-
tributes, which an agent aims to maximise while an
adversary seeks to minimise.
An attribute can have a value from the following
seven values: VERY LOW, LOW, MEDIUM LOW, MEDIUM,
MEDIUM HIGH, HIGH, and VERY HIGH. The goal satis-
fied condition of a goal is true when both the attribute
values are greater than MEDIUM HIGH, and the goal
failed condition is true when both the attribute val-
ues are less than MEDIUM LOW. The default goal state
has MEDIUM values for both the attributes. The incom-
patibility conditions for both the α and β goals is true
if the value of the second attribute equals VERY HIGH.
For each incompatibility condition, there is only one
incompatibility state; thus, k in the top-k states is set
to 3, ensuring a solution with compatible states for
each relationship. For each agent, the reasoning bud-
get is set to 50 simulations, as multiple branches can
be reasonably explored in this budget. The cut-off
depth for each simulation is set to 25 so that compu-
tational resources can be effectively managed.
All experiments are run on a Ubuntu Linux system
(version 22.04.1), using Docker (version 24.0.5) and
Python (version 3.10.12), as indicated earlier. To en-
able parallel processing within a container, each con-
tainer runs 7 threads (1 + maximum branching fac-
tor). The system specifications are 16GB RAM and a
Ryzen 7 4800H processor with a base clock speed of
2.9GHz having 8 CPU cores and 16 threads.
To measure the number of communication mes-
sages, we sum the number of communications for: (i)
delegate sub-goal requests from the delegator agents
to the delegatee agents, (ii) sending win ratios along
with top k goal states from the delegatee agents to the
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
328
delegator agents, (iii) sending the contracts along with
the best states from the delegator agents to the dele-
gatee agents, and (iv) acknowledgments of contracts
from the delegatee agents to the delegator agents.
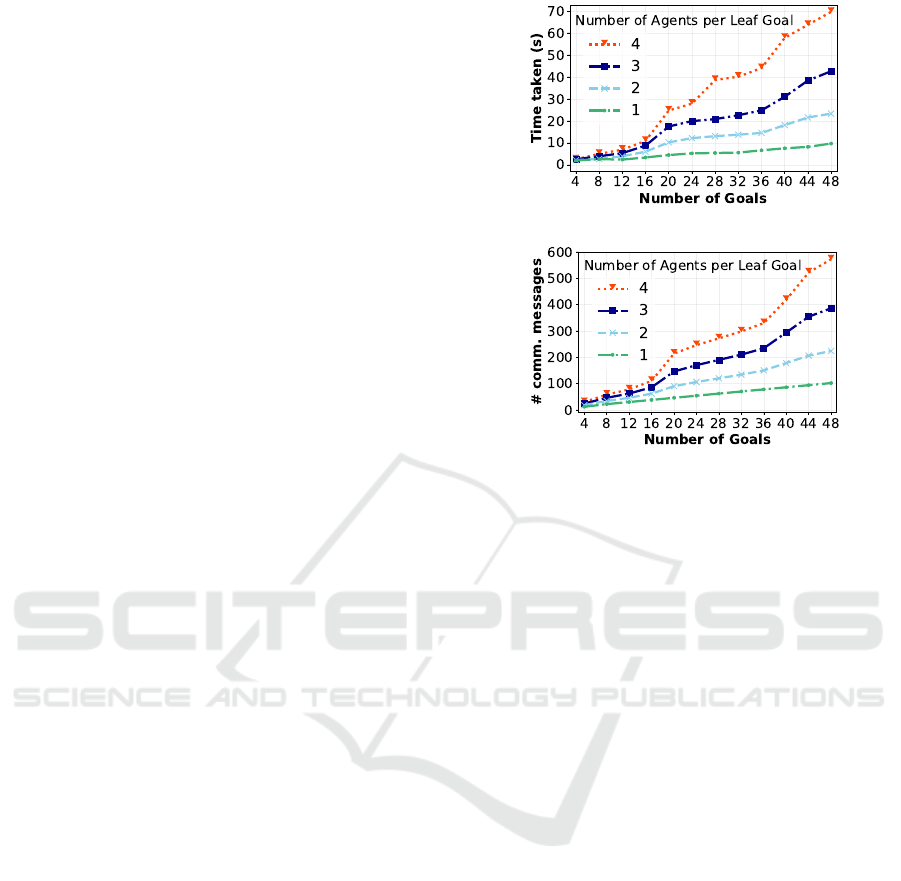
7.2 Results
Figure 6(a) shows the time taken (in seconds) to per-
form self-exploration when the number of goals is
varied from 4 to 48. The number of agents is also
varied from one agent per leaf goal to four agents per
leaf goal. We observe a relatively linear increase in
the time taken when the number of goals is increased.
For example, the time taken increases from 2.0 sec-
onds to 9.7 seconds when the number of goals is in-
creased from 4 to 48 while keeping the number of
agents per leaf goal fixed at 1. Similarly, there is a
relatively linear increase in the time taken when the
number of agents per leaf goal is increased. For ex-
ample, the time taken increases from 9.7 seconds to
69.6 seconds when the number of agents per leaf goal
is increased from 1 to 4, while keeping the number of
goals fixed at 48.
Figure 6(b) shows the number of communication
messages between agents when we vary the number
of goals and the number of agents per leaf goal. Sim-
ilarly to the time taken, we observe a relatively lin-
ear trend in the number of communication messages
when the number of goals or the number of agents per
leaf goal increases. For example, the number of com-
munication messages increases from 12 to 102 when
the number of goals is increased from 4 to 48 while
keeping the number of agents per leaf goal fixed at 1.
In addition, the number of communication messages
increases from 102 to 572 when the number of agents
per leaf goal increases from 1 to 4, while keeping the
number of goals fixed at 48. The results demonstrate
that our approach linearly scales with both the number
of goals and the number of agents per leaf goal.
7.3 Threats to Validity
We mitigate construct validity threats by measuring
both the number of communication messages and the
duration of time taken. We mitigate internal valid-
ity threats by varying (i) the ratio of leaf to non-leaf
goals, and (ii) the number of subgoals in the input goal
models. In our input goal models, the percentage of
non-leaf goals varies from 17.5% to 25% with a me-
dian of 21.7%. Furthermore, 29.7%, 10.9%, 20.3%
and 39.1% of non-leaf goals had three, four, five and
six subgoals, respectively. We acknowledge the ex-
ternal validity threats inherent in our simulations and
have proactively addressed these by explicitly stating
(a)
(b)
Figure 6: The impact of the number of goals grouped by
the number of agents per leaf goal on (a) time taken (in
seconds), and (b) the number of communication messages.
our assumptions (see Section 5.1). Nevertheless, the
primary focus of our approach remains the coordina-
tion mechanism between agents. We mitigate the con-
clusion validity threats by having 48 (12 × 4) data
points each for measuring the time taken and the num-
ber of communication messages, and ensuring that
linear trends were observed within those data points.
8 RELATED WORK
Explicit modelling of goals has been a theme in soft-
ware engineering for many years. Goal-oriented re-
quirements engineering (GORE) (Van Lamsweerde,
2001; Yu, 1997) attempts to capture the variability of
requirements through AND and OR decompositions
of ‘hard’ functional goals, and through contribution
links to ‘soft’ goals that capture quality requirements.
Subsequently such goal models have been extended
to model and reason about many other types of goal
relationships, such as temporal dependencies (Brown
et al., 2006; Liaskos et al., 2010; Letier et al., 2008),
fuzziness (Baresi et al., 2010), uncertainty (Cheng
et al., 2009), context (Alrajeh et al., 2020; Aradea
et al., 2023), etc. See (Horkoff et al., 2019) for a
recent survey on goal models in requirements engi-
neering. These functional goals eventually decom-
pose into ‘leaf’ goals that can be mapped to system
components and system specifications, e.g., (Yu et al.,
Coordinated Self-Exploration for Self-Adaptive Systems in Contested Environments
329

2008; Van Lamsweerde, 2009). Beyond informing
system design to better align with requirements and
in common with the approach taken here, goals have
been used as first-class runtime entities that have a
goal state the system/agent seeks to achieve or main-
tain (Dalpiaz et al., 2013; Braubach et al., 2005;
Morandini et al., 2017).
Castelfranchi (Castelfranchi, 2000) points out that
conflicts between agents only exist in relation to goals
– whereas there are “no real conflicts (but just oppo-
sitions, contrasts, etc.) between mere forces”. For
Castelfranchi, agents make decisions that attempt to
actively satisfy a goal. Conflicts occurring between
agents are intrinsic and direct when the goals or be-
liefs that agents hold are logically inconsistent. This
distinction between epistemic/knowledge and extrin-
sic/physical levels has also been adopted by others in
discussions of conflict resolution, e.g., (Tessier et al.,
2005; Barber et al., 2000; Tang and Basheer, 2017).
In this paper, we propose an approach to making the
states of goals compatible to enable agents to form
effective responses (intentions) to adversarial events.
Other works such as (Wang et al., 2012; Za-
telli et al., 2016) focus on conflicting intentions (ac-
tions and plans) rather than direct conflicts between
the goals themselves. In some cases, the end goal
might be shared, but there may be differing means
for achieving that goal. Alternatively, while different
goals held by agents may not in themselves be con-
flicting, the action for realising those respective goals
may conflict. Such conflict can be characterised as
“indirect” conflict in Castlefranchi’s terms. In par-
ticular, such conflicts may arise when there are tem-
poral dependencies between the actions specified in
plans are in coordination between agents, or where
agents share resources in the execution of their goals
(Thangarajah and Padgham, 2011).
In multi-agent systems, two primary challenges
are task and motion planning (Verma and Ranga,
2021). Motion planning involves all agents working
in a distributed manner to ensure collision-free move-
ment (Panagou et al., 2015). However, this distributed
approach faces scalability challenges, including in-
creased coordination complexity and communication
overhead as the number of agents grows, resulting
in degraded response times. In task planning, con-
flict avoidance has been modelled as a decentralised
constraint optimisation problem (DCOP), where con-
cerns are represented as DCOP constraints (Dragan
et al., 2023). However, this approach is less effective
for complex coordination tasks, as it can result in cy-
cles within the DCOP constraint graph.
There have been several modifications and exten-
sions to MCTS over the last decade to suit differ-
ent research needs (
´
Swiechowski et al., 2022), in-
cluding parallelising (Cazenave and Jouandeau, 2007;
Chaslot et al., 2008) and decentralising (Kurzer
et al., 2018; Best et al., 2016; Hashmi et al.,
2023) the search process. Cazenave and Jouandea’s
(Cazenave and Jouandeau, 2007) approach uses a
master/worker communication pattern where the mas-
ter thread builds the tree and worker threads run sim-
ulations and report the win ratios to the master thread,
which updates the tree accordingly, making the sys-
tem relatively centralised. In contrast, Chaslot et
al.’s (Chaslot et al., 2008) approach allows multiple
threads to share and modify the game tree, using mu-
texes to manage simultaneous modifications, which
can slow down the computation. Kurzer et al. (Kurzer
et al., 2018) introduce a decentralised joint-action
MCTS with macro-actions to minimise the search
space, while Best et al. (Best et al., 2016) propose a
decentralised MCTS for joint planning among agents,
but do not account for adversaries in the environment.
Hashmi et al. (Hashmi et al., 2023) present a decen-
tralised MCTS for a multi-agent setting where each
agent computes resilient responses while considering
adversaries in the environment; however, the selec-
tion of an agent’s response involves no coordination
with any other agent. Our approach differs because
it enables agents to coordinate and compute resilient
responses in an adversarial setting.
9 CONCLUSIONS AND FUTURE
WORK
We proposed a coordinated self-exploration approach
where agents coordinate with their delegator agents to
identify compatible responses for their goals, focus-
ing on the case of pair-wise goal dependencies. Our
approach is applicable in partially-observable, con-
tested environments where goals can have incompat-
ible states. Our approach resolves incompatible goal
states in the planning phase through coordination be-
tween agents, and remains linear when the number of
goals and agents increase in amounts proportionate to
the scenario type and size considered in this paper.
In terms of future work, several directions merit
further investigation. First, to complement our ap-
proach, a purely distributed coordination mechanism
needs to be developed, whereby a delegatee agent
would coordinate with another delegatee agent (as op-
posed to the delegator agent) to reduce single points
of failure. This will involve the most promising can-
didate agents for the given goals interacting, where
the agent for one goal communicates with the agent
for another goal and adapts its reasoning accordingly.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
330

Second, settings involving more than two goals in an
incompatibility relationship need to be explored as
part of a more general framework for addressing goal
inter-dependencies. Such a framework should, ide-
ally, also address circular dependencies (e.g., through
recursive checks for incompatibilities) and depen-
dencies at varying depths or outside immediate sub-
goals/teams (see Section 5.1). Lastly, while this paper
focuses on agents in a single team, complex systems
often consist of multiple collaborating teams. Such
a system-of-systems approach (cf. (Boardman and
Sauser, 2006)) may introduce inter-team goal depen-
dencies, i.e., dependencies between goals associated
with agents belonging to different teams. Address-
ing such dependencies will require selective sharing
to achieve coordinated agent actions.
ACKNOWLEDGEMENTS
This work was undertaken as part of the “Autonomic
Cyber Resilience and Antifragility” Collaborative Re-
search Project (CRP), supported by the Australian
Department of Defence – Next Generation Technolo-
gies Fund initiative (Cyber theme).
REFERENCES
Alrajeh, D., Cailliau, A., and van Lamsweerde, A. (2020).
Adapting requirements models to varying environ-
ments. In Procs. of the ACM/IEEE 42nd Int. Confer-
ence on Software Engr., pages 50–61.
Aradea, Supriana, I., and Surendro, K. (2023). Aras: adap-
tation requirements for adaptive systems: Handling
runtime uncertainty of contextual requirements. Au-
tomated Software Engr., 30(1):2.
Atighetchi, M. and Pal, P. (2009). From auto-adaptive
to survivable and self-regenerative systems successes,
challenges, and future. In 8th IEEE Int. Symp. on Net-
work Computing and Applications, pages 98–101.
Barber, K. S., Liu, T. H., and Han, D. C. (2000). Strategic
decision-making for conflict resolution in dynamic or-
ganized multi-agent systems. A Special Issue of CERA
Journal.
Baresi, L., Pasquale, L., and Spoletini, P. (2010). Fuzzy
goals for requirements-driven adaptation. In 2010
18th IEEE Int. Requirements Engr. Conference, pages
125–134. IEEE.
Baruwal Chhetri, M., Uzunov, A. V., Vo, B., Nepal, S.,
and Kowalczyk, R. (2019). Self-improving autonomic
systems for antifragile cyber defence: Challenges and
opportunities. In Procs. of 16th IEEE Int. Confer-
ence on Autonomic Computing (ICAC), pages 18–23.
IEEE.
Baruwal Chhetri, M., Uzunov, A. V., Vo, Q. B., Kowal-
czyk, R., Docking, M., Luong, H., Rajapakse, I., and
Nepal, S. (2018). AWaRE – towards distributed self-
management for resilient cyber systems. In Procs. of
the 23rd Int. Conference on Engr. of Complex Com-
puter Systems (ICECCS), pages 185–188. IEEE.
Best, G., Cliff, O. M., Patten, T., Mettu, R. R., and Fitch, R.
(2016). Decentralised Monte Carlo Tree Search for
active perception. In Procs. of the 12th Int. Workshop
on the Algorithmic Foundations of Robotics (WAFR).
Springer.
Boardman, J. and Sauser, B. (2006). System of Systems -
the meaning of of. In 2006 IEEE/SMC Int. Conference
on System of Systems Engr., pages 118–123. IEEE.
Braubach, L., Pokahr, A., Moldt, D., and Lamersdorf, W.
(2005). Goal representation for BDI agent systems.
In Programming Multi-Agent Systems: Second Int.
Workshop ProMAS 2004, New York, NY, USA, July 20,
2004, Selected Revised and Invited Papers 2, pages
44–65. Springer.
Brown, G., Cheng, B. H. C., Goldsby, H., and Zhang, J.
(2006). Goal-oriented specification of adaptation re-
quirements engineering in adaptive systems. In Procs.
of the 2006 Int. workshop on Self-adaptation and Self-
managing Systems, pages 23–29.
Castelfranchi, C. (2000). Conflict ontology. In Compu-
tational Conflicts: Conflict Modeling for Distributed
Intelligent Systems, pages 21–40. Springer.
Cazenave, T. and Jouandeau, N. (2007). On the paralleliza-
tion of UCT. In Computer games workshop.
Chaslot, G. M. J.-B., Winands, M. H. M., and van
Den Herik, H. J. (2008). Parallel Monte-Carlo Tree
Search. In Int. Conference on Computers and Games,
pages 60–71. Springer.
Cheng, B. H. C., Sawyer, P., Bencomo, N., and Whittle,
J. (2009). A goal-based modeling approach to de-
velop requirements of an adaptive system with envi-
ronmental uncertainty. In Int. Conference on Model
Driven Engr. Languages and Systems, pages 468–483.
Springer.
Dalpiaz, F., Borgida, A., Horkoff, J., and Mylopoulos, J.
(2013). Runtime goal models. In 7th Int. Conference
on Research Challenges in Info. Sci.(RCIS), pages 1–
11. IEEE.
Dragan, P.-A., Metzger, A., and Pohl, K. (2023). To-
wards the decentralized coordination of multiple self-
adaptive systems. In 2023 IEEE Int. Conference on
Autonomic Computing and Self-Organizing Systems
(ACSOS), pages 107–116. IEEE.
Florio, L. (2015). Decentralized self-adaptation in large-
scale distributed systems. In Procs. of the 2015
10th Joint Meeting on Foundations of Software Engr.,
pages 1022–1025.
Franch, X., L
´
opez, L., Cares, C., and Colomer, D. (2016).
The i* framework for goal-oriented modeling. In
Domain-Specific Conceptual Modeling, pages 485–
506. Springer.
Hashmi, S. S., Dam, H. K., Baruwal Chhetri, M., Uzunov,
A. V., Colman, A., and Vo, Q. B. (2025). Proactive
self-exploration: Leveraging information sharing and
predictive modelling for anticipating and countering
adversaries. Expert Systems with Applications, 267:1–
17, article 126118.
Coordinated Self-Exploration for Self-Adaptive Systems in Contested Environments
331

Hashmi, S. S., Dam, H. K., Smet, P., and Baruwal Chhetri,
M. (2022). Towards Antifragility in Contested En-
vironments: Using Adversarial Search to Learn, Pre-
dict, and Counter Open-Ended Threats. In Procs. of
the IEEE Int. Conference on Autonomic Computing
and Self-Organizing Systems (ACSOS), pages 141–
146. IEEE.
Hashmi, S. S., Dam, H. K., Uzunov, A. V., Baruwal Chhetri,
M., Ghose, A., and Colman, A. (2023). Goal-Driven
Adversarial Search for Distributed Self-Adaptive Sys-
tems. In Procs. of IEEE Int. Conference on Software
Services Engr. (SSE), pages 198–209. IEEE.
Hintjens, P. et al. (2013). Advanced Request-Reply Pat-
terns. In ZeroMQ: messaging for many applications,
chapter 3. O’Reilly Media, Inc.
Horkoff, J., Aydemir, F. B., Cardoso, E., Li, T., Mat
´
e, A.,
Paja, E., Salnitri, M., Piras, L., Mylopoulos, J., and
Giorgini, P. (2019). Goal-oriented requirements engi-
neering: an extended systematic mapping study. Re-
quirements Engr., 24:133–160.
IC3 (2023). FBI Internet Crime Report 2023.
https://www.ic3.gov/Media/PDF/AnnualReport/
2023 IC3Report.pdf.
Ismail, Z. H., Sariff, N., and Hurtado, E. (2018). A sur-
vey and analysis of cooperative multi-agent robot sys-
tems: challenges and directions. Applications of Mo-
bile Robots, 5:8–14.
Kocsis, L. and Szepesv
´
ari, C. (2006). Bandit based Monte-
Carlo planning. In European Conference on Machine
Learning, pages 282–293. Springer.
Kurzer, K., Zhou, C., and Z
¨
ollner, J. M. (2018). Decentral-
ized cooperative planning for automated vehicles with
hierarchical Monte Carlo Tree Search. In 2018 IEEE
Intelligent Vehicles Symp. (IV), pages 529–536. IEEE.
Letier, E., Kramer, J., Magee, J., and Uchitel, S. (2008).
Deriving event-based transition systems from goal-
oriented requirements models. Automated Software
Engr., 15:175–206.
Liaskos, S., McIlraith, S. A., Sohrabi, S., and Mylopoulos,
J. (2010). Integrating preferences into goal models for
requirements engr. In 2010 18th IEEE Int. Require-
ments Engr. Conference, pages 135–144. IEEE.
Linkov, I. and Kott, A. (2019). Fundamental concepts of
cyber resilience: Introduction and overview. Cyber
Resilience of Systems and Networks, pages 1–25.
Morandini, M., Penserini, L., Perini, A., and Marchetto, A.
(2017). Engineering requirements for adaptive sys-
tems. Requirements Engr., 22(1):77–103.
Panagou, D., Stipanovi
´
c, D. M., and Voulgaris, P. G. (2015).
Distributed coordination control for multi-robot net-
works using Lyapunov-like barrier functions. IEEE
Transactions on Automatic Control, 61(3):617–632.
Ponniah, J. and Dantsker, O. D. (2022). Strategies for
scaleable communication and coordination in multi-
agent (uav) systems. Aerospace, 9(9):488.
Silver, D., Huang, A., Maddison, C. J., Guez, A., Sifre, L.,
et al. (2016). Mastering the game of Go with deep neu-
ral networks and tree search. Nature, 529(7587):484–
489.
´
Swiechowski, M., Godlewski, K., Sawicki, B., and
Ma
´
ndziuk, J. (2022). Monte Carlo Tree Search: A
review of recent modifications and applications. Arti-
ficial Intelligence Review, pages 1–66.
Tang, A. Y. and Basheer, G. S. (2017). A conflict resolution
strategy selection method (ConfRSSM) in multi-agent
systems. Int. Journal of Advanced Computer Science
and Applications, 8(5).
Tesauro, G., Chess, D. M., Walsh, W. E., Das, R., et al.
(2004). A multi-agent systems approach to autonomic
computing. In Procs. of the Third Int. Joint Confer-
ence on Autonomous Agents and Multiagent Systems,
volume 1, pages 464–471.
Tessier, C., Chaudron, L., and M
¨
uller, H.-J. (2005). Con-
flicting agents: conflict management in multi-agent
systems, volume 1. Springer Science & Business Me-
dia.
Thangarajah, J. and Padgham, L. (2011). Computationally
effective reasoning about goal interactions. Journal of
Automated Reasoning, 47:17–56.
Uzunov, A. V., Baruwal Chhetri, M., and Wondoh, J.
(2021). GOURMET: A methodology for realiz-
ing goal-driven self-adaptation. In Procs. of 2021
ACM/IEEE Int. Conference on Model Driven Engr.
Languages and Systems Companion (MODELS-C),
pages 197–202. IEEE.
Uzunov, A. V., Vo, Q. B., Dam, H. K., Harold, C.,
Baruwal Chhetri, M., Colman, A., and Hashmi, S. S.
(2023). Adaptivity and Antifragility. In Kott, A.,
editor, Autonomous Intelligent Cyber Defense Agent
(AICA): A Comprehensive Guide, volume 87 of Ad-
vances in Information Security, chapter 10. Springer
Nature.
Van Lamsweerde, A. (2001). Goal-oriented requirements
engineering: A guided tour. In Procs. 5th IEEE Int.
Symp. on Requirements Engr., pages 249–262. IEEE.
Van Lamsweerde, A. (2009). Requirements Engineering:
From system goals to UML models to software, vol-
ume 10. Chichester, UK: John Wiley & Sons.
Verma, J. K. and Ranga, V. (2021). Multi-robot coordina-
tion analysis, taxonomy, challenges and future scope.
Journal of intelligent & robotic systems, 102:1–36, ar-
ticle 10.
Wang, X., Cao, J., and Wang, J. (2012). A runtime goal
conflict resolution model for agent systems. In 2012
IEEE/WIC/ACM Int. Conference on Web Intelligence
and Intelligent Agent Technology, volume 2, pages
340–347. IEEE.
Weyns, D. and Georgeff, M. (2009). Self-adaptation using
multiagent systems. IEEE software, 27(1):86–91.
Yu, E. (1997). Towards modelling and reasoning support
for early-phase requirements engineering. In Procs. of
ISRE’97: 3rd IEEE Int. Symp. on Requirements Engr.,
pages 226–235. IEEE.
Yu, Y., Lapouchnian, A., Liaskos, S., Mylopoulos, J., and
Leite, J. C. (2008). From goals to high-variability soft-
ware design. In Foundations of Intelligent Systems:
17th Int. Symposium, ISMIS 2008 Toronto, Canada,
May 20-23, 2008 Procs. 17, pages 1–16. Springer.
Zatelli, M. R., H
¨
ubner, J. F., Ricci, A., and Bordini, R. H.
(2016). Conflicting goals in agent-oriented program-
ming. In Procs. of the 6th Int. Workshop on Pro-
gramming Based on Actors, Agents, and Decentral-
ized Control, pages 21–30.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
332
