
Efficient Selection of Consistent Plans Using Patterns and Constraint
Satisfaction for Beliefs-Desires-Intentions Agents
Veronika Kurchyna
∗
, Ye Eun Bae, Jan Ole Berndt and Ingo J. Timm
German Research Center for Artificial Intelligence (DFKI),
Cognitive Social Simulation, Behringstr. 21, 54296 Trier, Germany
Keywords:
BDI Agent, Agent-Based Simulation, Agent Deliberation, Complexity Optimization.
Abstract:
Agent-based models can portray complex systems that emerge from the actions of individual actors. The use
of many agents with complex decision-making processes in a large action space is computationally intensive
and leads to slow simulations. This work proposes an alternative approach to agent deliberation by pre-
computing valid action sequences and simplifying decision-making at runtime to a linear problem. The method
is demonstrated with pandemic self-protection as use case for an implementation of the concept. Additionally,
a step-by-step guideline for application of this approch is provided.
1 INTRODUCTION
Agent-based models (ABMs) and multiagent systems
(MAS) are widely used to study various complex
real-life systems, addressing diverse questions rang-
ing from industrial applications, such as agriculture
and land use (Bert et al., 2011), to social phenomena,
such as family planning (Rodermund et al., 2018) and
health behaviour (Cuevas, 2020). Agents are designed
to act autonomously while pursuing their goals, oper-
ating under constraints such as limited resources, in-
teractions with other agents, or incomplete knowledge
of their environment (Magessi and Antunes, 2015).
To formalize the decision-making processes of indi-
vidual agents, the Beliefs-Desires-Intentions (BDI)
architecture is commonly used (Caillou et al., 2017).
The typical deliberation process of an agent in-
volves taking into account its knowledge of the world
and current state—alongside its desires to formulate
intentions. These intentions represent the concrete ac-
tions the agent plans to take in order to achieve its ob-
jectives. A key challenge arises when conflicting be-
havioural options emerge. Various approaches have
been proposed to address this issue and enhance the
efficiency of agent deliberation. For instance, agents
can prioritize their desires and find ways to recon-
cile the competing courses of action (Timm, 2004).
A goal deliberation method is proposed, aiming at re-
ducing computational resources and the burden of en-
suring the consistency of agents’ goal sets by mak-
∗
Corresponding author
ing agents select their own goals based on the sit-
uation (Pokahr et al., 2005). Moreover, the ad-hoc
computation of consistent and logical plans for agents
is commonly used in practice despite being resource-
intensive, particularly for models with large numbers
of agents, such as used in digital twins in smart cities
contexts (Caillou et al., 2017), as well as large action
spaces (Tkachuk et al., 2023). Another attempt was
made using a context-sensitive deliberation frame-
work, which prompts agents to employ alternative de-
liberation methods, instead of following default be-
haviour, only when there is a relevant change in con-
text. This approach helps reduce the computational
costs of decision-making (Jensen et al., 2022).
In light of such challenge, this paper proposes an
alternative approach that leverages best practices es-
tablished in software engineering, so-called design
patterns. By employing these techniques, we sug-
gest pre-simulation generation of consistent plans
for agents to follow. This approach eliminates the
need for at-runtime filtering of options and consis-
tency checks, providing a more efficient and effective
means of agents’ decision-making in ABMs.
We begin by introducing the fundamentals of
ABMs, outlining the relevant software desing patterns
applied in this work, and providing a brief overview of
key terminology, along with examples of our method.
We then delve into the procedure in detail, illustrating
it with a practical use case and offering a step-by-step
guide for applying the apporach to other contexts. Fi-
nally, the runtime efficiency of the proposed method
Kurchyna, V., Bae, Y. E., Berndt, J. O. and Timm, I. J.
Efficient Selection of Consistent Plans Using Patterns and Constraint Satisfaction for Beliefs-Desires-Intentions Agents.
DOI: 10.5220/0013141700003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 1, pages 333-341
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
333

is demonstrated using a model for choosing protec-
tive behaviours in the context of the COVID-19 pan-
demic with comparisons made to hypothetical alter-
native implementations of decision-making.
2 FOUNDATIONS
The foundation section of this paper introduces the
basic principles of ABM and the BDI architecture
with a particular focus on the formalisation of de-
liberation. Additionally, design patterns, specifically
strategies, and their application within an ABM con-
text are discussed.
2.1 Beliefs, Desires and Intentions
ABMs simulate complex systems using autonomous
agents that interact with their environment and each
other in a reactive or goal-directed manner. In
such models, complex system-wide dynamics re-
sult from the individual-level behaviours of the
agents (Wooldridge and Jennings, 1995). Differ-
ent approaches for formulating agents exist, among
which BDI is a widely used architecture to describe
agents.
Agents operate on their Beliefs, which are com-
posed of subjective observations, knowledge and as-
sumptions, and Desires, which describe goal states
agents wish to achieve. Based on their beliefs, agents
identify possible courses of actions in an Option Gen-
eration function. These options are filtered and pri-
oritized based on feasibility and compatibility with
desires. Finally, agents select one option as Inten-
tion to fulfill a certain desire and act upon it. The
resulting changes to the environment are fed back as
sensor input, which leads to a revision of beliefs and
checking if an agent remains committed to a chosen
option (Saadi et al., 2020).
2.2 Design Patterns: Strategies
Design patterns serve the purpose of reusable, mod-
ular and maintanable software engineering and pro-
pose best practices in several domains of software.
These design patterns are categorized by their pur-
pose, such as object creation, composite structures
and behaviour (Gamma et al., 1994). For this pa-
per, Behavioural Patterns are important, with dif-
ferent means of defining program behaviour in a
modular way. Strategies are the pattern that will
be used to implement agent behaviour. The pur-
pose of strategies is to provide variations of code
which can be easily switched out programmatically
without large, hard-coded condition-action struc-
tures (Christopoulou et al., 2012).
A strategy is typically implemented as an inter-
face which defines methods, with each strategy imple-
menting the required functions. As a result, executing
objects require no knowledge of the inner workings
of a strategy and preserve the principle of encapsu-
lation (Wick and Phillips, 2002). The authors see a
major benefit of using strategies for agent-behaviour
in the possibility to have agents execute a list of strate-
gies and move plausibility checks into the strategy in-
stead of a higher-level code block with more hard-
coded conditions.
2.3 Terminology and Definitions
To ensure a unified understanding and distinction of
terminology used in this paper, the definitions are
given as follows:
• Strategy. Using the term as used in the context of
design patterns in software development, a strat-
egy defines a behaviour or action which is exe-
cuted if certain conditions are met (Christopoulou
et al., 2012). Thus, a strategy is not a firm de-
cision of specific actions that will be performed,
but rather the willingness to perform them if the
preconditions are met.
• Behaviour. While the strategies in this model
determine when something should be done, be-
haviours define what needs to be done, such as in-
creased adherence to safety recommendations or
reduced contacts with others.
• Behaviour Package. A set of consistent strate-
gies which covers all possible preconditions, en-
suring that agent behaviour is well defined at each
simulation step. Thus, a selected package resem-
bles Intentions of an agent. In this context, we use
the term plan synonymously.
• Package Class. Depending on the evaluation
mechanism, several packages can be evaluated
into the same (or a close) score which suggests
high similarity between packages. Assuming that
packages of the same class are equivalent means
of equal value, agents can be indifferent and do
not prefer a specific package, but rather a class
from which any package can be chosen randomly.
Programatically, these classes allow representing
equivalent packages as elements of an unordered
set.
• Constraints. A set of logical expressions which
must all be evaluated to True for a plan to be
valid (Brailsford et al., 1999).
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
334

Three types of constraints are likely to be encoun-
tered when modelling behaviours, which are exampli-
fied with A, B and C as boolean variables representing
three different strategies:
1. Mutual Exclusivity. A =⇒ ¬B, meaning that B
can never co-occur with A.
2. Co-Occurence. A =⇒ C, meaning that whenever
A holds true, C must necessarily also be true.
3. Definedness. B ⊕ C, meaning that, using the
XOR-Operator, either B or C must be true.
As shown in Table 1, the application of these
constraints eliminates 5/8 combinations, with each
remaining table row being an executable behaviour
package. Alternatively, the three sample constraints
can also be expressed in a matrix, as shown in Ta-
ble 2. 0 denotes mutual exclusivity and 1 forced
co-occurence. Empty cells indicate independence
between two variables. It is important to remem-
ber that this graphical representation cannot convey
the definedness-requirement. However, this format
can give an overview of necessary relationships and
the graphical representation facilitates deriving corre-
sponding logical constraints in a structured, commu-
nicable manner.
This approach is essentially a modified form of
the Boolean Satisfiability (SAT) problem, which deals
with the question of whether a given logic expression
has at least one configuration of boolean values that
evaluates to true. While the verification of one con-
figuration is fast, an exhaustive search is an exponen-
tial endeavour. Our approach includes the solving of
the #-SAT problem, which requires a full enumeration
and evaluation of all possible boolean configurations
that satisfy all constraints (Creignou and Hermann,
1996). As such, the complexity of the initial pack-
age generation and filtering is exponential. However,
we also assume that the action space of agents is not
only finite, but also small enough for the exponen-
tial nature of the underlying theoretical problem to be
handleable. Further, we also assume that the action
Table 1: Truth Table summarising possible configurations
and filtering out invalid rows.
A B C
((B ∧ ¬C) ∨ (¬B ∧ C))
∧(A =⇒ ¬B) ∧ (A =⇒ C)
1 F F F F
2 F F T T
3 F T F T
4 F T T F
5 T F F F
6 T F T T
7 T T F F
8 T T T F
Table 2: The matrix of the example with mutual exclusivity
between A and B, as well as necessary C in case of A.
A B C
A 0 1
B 0 0
C - 0
space is largerly static - no new actions or axioms are
added between model runs. Thus, we can save the re-
sults of an exhaustive search to a file and perform the
exponential enumeration only once.
3 USE CASE: PANDEMIC
MODELLING
The use of ABMs has gained significant popularity in
studying pandemics, particularly due to the ongoing
COVID-19 pandemic (Lorig et al., 2021). It serves as
an illustrative example of how agents need to handle
intricate situations where a diverse range of actions
exists, some of which may be partially or fully mutu-
ally exclusive. To model agent behaviours in response
to the pandemic, researchers often rely on routines
and needs models. However, applying the BDI archi-
tecture to formalize agent behaviours leads to an in-
tricate decision process. Agents must possess the ca-
pability to identify and reject any combination of be-
haviours that are inconsistent or mutually exclusive.
Thus, this use case is well suited for the demonstra-
tion of this strategy-based constraint approach.
In this study, we focus on a model that en-
compasses a wide range of behaviours available to
agents. These behaviours include actions such as self-
quarantine in case of illness, compliance with exter-
nal quarantine orders, random rapid testing, testing in
case of symptoms, avoiding crowded locations, and
varying levels of contact frequency and preventive
measures like wearing masks correctly and maintain-
ing physical distancing during interactions.
We choose a total of 8 behaviours agents can
choose from. However, since two of these behaviours
have numeric levels (contact frequency and degree of
preventive measures), they were coded into multiple
binary choices to avoid fuzzy logic with increased
bases for the exponential number of possible combi-
nations. With a total of 14 strategies, there are over 16
thousand possible combinations of these behaviours
that an agent could potentially implement or refrain
from:
• Q
v
: Agents will quarantine voluntarily if they de-
velop disease symptoms
• Q
c
: Agents will comply with a quarantine order
due to an official positive test or contact tracing
Efficient Selection of Consistent Plans Using Patterns and Constraint Satisfaction for Beliefs-Desires-Intentions Agents
335

• Cw
A
: Agents will avoid crowded locations (with
more than x visitors, assumed to be a limit at
which distancing becomes no longer possible)
• T
r
: Agents will occasionally randomly perform a
rapid test
• T
s
: Agents will perform a rapid test if they feel
disease symptoms
• Q
T
: Agents will quarantine voluntarily even if a
rapid test is negative
• C
o
: Agents cease all contacts entirely
• C
l
: Agents have a low level of contacts during
their daily routines
• C
m
: Agents have a medium level of contacts dur-
ing their daily routines
• C
h
: Agents have a high level of contacts during
their daily routine
• P
h
: Agents put high efforts into preventing an in-
fection or diseapse spread
• P
m
: Agents put medium effort into protecting
themselves and others
• P
l
: Agents put low effort into protecting them-
selves and others of infection
• P
r
: Agents refuse all types of protective behaviour
However, a substantial number of these combina-
tions lacks practicality or coherence. For instance, an
agent who restricts themselves to low contacts would
never have a large number of contacts simultaneously,
and an agent who willingly chooses to self-quarantine
upon experiencing illness symptoms would be un-
likely to refuse quarantine after receiving a positive
test result.
Such inconsistencies can arise from conflicting
goals. As such, the formalisation of forbidden or re-
quired combinations contributes to the resolution of
goal conflicts in agents, since they can only choose
from valid configurations without logical inconsisten-
cies. While this does not solve the question of goal
priorization, this step forbids attempts at satisfying
conflicting goals through incompatible and contradic-
tory actions.
3.1 Behavioural Packages
In classic BDI, agents construct a plan using a
bottom-up approach, evaluating different options re-
garding feasibility, compatibility with own goals and
possible outcomes. This is a process repeated by each
agent multiple times over the course of a simulation,
with agents typically operating on the same set of
rules and action spaces under different individual con-
ditions and desires.
Behavioural Packages advocate a top-down ap-
proach in which agents select from a list of be-
haviours, forming a consistent plan that can be ex-
ecuted. Using strategies, which are either enabled
or disabled, agents gain flexibility in their decision-
making by providing a larger array of choices than
a manual selection. For that, one may also use aids
such as different levels represented as individual be-
haviours - while this increases the number of avail-
able actions artificially, handling of different levels of
the same behaviour type is easy with a set of binary,
mutually exclusive decisions. Assuming that each be-
haviour can be both a consistent, repeated course of
action (e.g. the number of contacts during work etc.)
as well as the general willingness to do something
(e.g. quarantining in case of illness symptoms), we
can consider the deliberation step as a periodic re-
evaluation of which behavioural combination to use.
As such, instead of deciding on individual be-
haviours, an agent would choose a package of be-
haviours, which corresponds to choosing a plan from
the set of possible intentions. These sets are referred
to as behavioural packages which must give unam-
biguous instructions to the agent. This means that,
besides consistency, behavioural packages also must
be complete: for behaviour types such as contacts
and preventive measures, a plan in which nothing was
chosen at all may be free from contradictions, but in-
complete, for an agent’s behaviour in all situations
that may arise during simulation must be defined. As
a result, one also must consider behaviour types, of
which at least one level needs to be selected.
In the context of the BDI-architecture, as shown
in Figure 1, pre-generated plans replace the option
generation and filtering. Using a scoring or selection
function, agents choose a plan from this existing set
of options as their intention.
Figure 1: Concept of how Behavioural Packages are inte-
grated in the BDI cycle using a selection function.
3.2 Building the Matrix
For the generation of the set of valid plans, we can
use a constraint satisfaction approach by first con-
sidering which behaviours are mutually exclusive, or
logically co-occur. Table 3 summarises the differ-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
336
Table 3: Matrix of behavioural combinations that always (1)
or never (0) co-occur at the same time. Empty cells mean
no rules for co-occurence are defined.
Q
v
Q
c
Cw
A
T
r
T
s
Q
T
C
o
C
l
C
m
C
h
P
h
P
m
P
l
P
r
Q
v
1 1 1 0 0
Q
c
0 0
Cw
A
0
T
r
1 1 0 0
T
s
1 1 0 0
Q
T
1 1 1 1 0 0
C
0
0 0 0 0 0 0 0 0 0 0 0 0 0
C
l
0 0 0
C
m
0 0 0
C
h
0 0 0
P
h
0 0 0 0
P
n
0 0 0 0
P
l
0 0 0 0
P
r
0 0 0 0 0 0 0 0 0 0
ent behavioural combinations and is to be read row-
wise. Note that this matrix is not symmetrical, since
some behaviours can co-occur, while the inversion
may become a must co-occur, such as Q
v
and Q
c
.
As an important disclaimer, it should be stated that
this is merely a demonstration of how such a be-
havioural matrix can be set up, and further empirical
research might be necessary to include probabilities
of behavious co-occuring in real life. For the purpose
of demonstration, however, we make basic common-
sense assumptions.
The ranges [0,1] score the probability of co-
occurence, with 0 signifying mutual exclusivity and
1 meaning mandatory co-occurence.
3.3 Filtering Using Constraints
Once a matrix has been built, the generation of con-
straints may either be automated or, for small use
cases, simply determined manually. For our example
in Table 3, eight constraints are sufficient to express
all conditions which a consistent plan must meet:
1. Q
v
=⇒ (Q
c
∧ T
s
∧ Q
T
)
2. T
r
=⇒ (Q
v
∧ T
s
)
3. T
s
=⇒ (Q
v
∧ Q
c
)
4. Q
T
=⇒ (Q
v
∧ Q
c
∧ T
r
∧ T
s
)
5. C
0
⊕ C
l
⊕ C
m
⊕ C
h
6. C
0
⊕ P
h
⊕ P
m
⊕ P
l
⊕ P
r
7. C
0
=⇒ ¬(Q
v
∨ Q
c
∨ Qw
A
∨ T
r
∨ T
s
∨ Q
T
∨ C
l
∨
C
m
∨ C
h
∨ P
h
∨ P
m
∨ P
l
∨ P
r
)
8. P
r
=⇒ ¬(Q
v
∨ Q
c
∨ Qw
A
∨ T
r
∨ T
s
∨ Q
T
∨ C
0
∨
P
h
∨ P
m
∨ P
l
)
By generating a 2
n
binary table, with n being the
number of possible behaviours, these constraints are
used to filter out all rows with invalid combinations.
After filtering, 58 behavioural packages remain.
3.4 From Plans to Intenions
The major benefit of our strategy-and-constraint ap-
proach is the pre-computation of valid action combi-
nations into packages that define agent behaviour to
reduce computational burden at runtime. However,
agents still need to choose a plan which aligns with
their desires, such as by computing utilities or using
other means of selection. During the development of
this method, several approaches have been explored
by the authors, including decision trees, fuzzy sets
and utility scoring. After careful examination of the
advantages and disadvantages of each method, the
plan selection function was not included as part of this
approach, since the suitability of a given method de-
pends on model-specific questions such as distinction
between actions, data availability for comparison and
empirical knowledge regarding decision mechanisms.
To complete the demonstration of this concept,
this work will present a scoring-approach based
on a psychological theory, which will allow agents
to choose an appropriate behavioural package us-
ing constant-time operations as efficient mechanism
which is unaffected by the size of the action space.
In other words, the number of strategies, packages or
agents will not affect on the calculation needed for
each agent to choose a behavioural package, having
the same number of computational steps.
4 CONCEPT SUMMARY
Before demonstrating the integration of behavioural
packages into the agent decision mechanisms, we pro-
vide a summary of the individual steps to apply the
proposed concept to an ABM:
1. Define Behaviours. Identify relevant behaviours
agents can perform and the conditions under
which it would make sense for them to execute
those behaviours.
2. Define Strategies and Levels. Since strategies
are binary, selected behaviours might have to be
split into different, mutually exclusive strategies
differing by the level/magnitutde of execution.
3. Define Relationships. For each combination of
two strategies, define whether there exists mutual
exclusivity or mandatory co-occurence.
4. Define Constraints. Define constraints to de-
scribe the relationships in the matrix using logic
expressions. Remember that more complex con-
ditions such as XOR might not be visualized.
5. Filter Packages. From a set of n
2
s
packages, fil-
ter out all that violate any of the defined con-
Efficient Selection of Consistent Plans Using Patterns and Constraint Satisfaction for Beliefs-Desires-Intentions Agents
337
straints. Checking an individual combination for
constraint satisfaction has a runtime of O(n
s
).
6. Design Choice Mechanism. Depending on the
characteristics of the model, data availability and
the action space, the choice mechanism can be de-
signed accordingly, such as using decision trees,
approximation heuristics or utility functions.
7. Implementation. Implement the strategies using
design patterns as guideline. For higher efficiency,
save valid packages to a file which is processed
during model initialization. Implement the cho-
sen mechanism for agents to choose the class of
packages appropriate for their current state.
5 IMPLEMENTATION: CUSTOM
SCORING FOR PANDEMIC
SELF-PROTECTION
Using the same behavioural strategies as defined in
Section 3, we build up a custom scoring of packages
based on a psychological theory to demonstrate how a
set of valid plans can be integrated into a model using
constant-time operations.
The chosen psychological theory is the Protec-
tion Motivation Theory (PMT) (Hedayati et al., 2023),
which delivers a framework for the explanation of
seemingly irrational behaviour. When individuals
confront a threat, they can either react adaptively to
protect themselves, or deny the threat with maladap-
tive reactions. Factors such as fear, self-efficacy, per-
ceived response costs and rewards are weighed up
against each other to determine the reaction (Rogers,
1983). Previous works, such as Kurchyna et al. (2024)
have demonstrated the application of PMT in the con-
text of agents. Additionally, a variety of empirical
studies regarding PMT and the COVID-19 pandemic
is available to support modelling efforts (Hedayati
et al., 2023).
Defining Protection Motivation as the difference
between Threat Appraisal (Perceived danger) and
Coping Appraisal (Ability to perform protective mea-
sures), the PMT offers a scale between adaptive (pos-
itive difference) and maladaptive (negative differ-
endce) responses and yields a single score which al-
lows identifying an individual’s stance on the spec-
trum of possible responses.
To use the PMT for a custom scoring system, we
take advantage of the adaptive-maladaptive axis and
assign each behavioural package a rating which cor-
responds to its package class as defined in Section 2.3.
This is achieved by attributing a partial score to each
individual strategy, with the overall score of a package
being the sum of strategies which are true. The scor-
ing of individual actions is a debatable topic, since it
is a subjective assessment: do scores reflect the effec-
tiveness of an action, or the effort required? In this
exemplary implementation, the scoring primarily re-
flects effort and attitude, rather than objective effec-
tiveness. Table 4 displays the scores assigned to each
strategy, which are not objective measures but evalu-
ations that are relative to each other.
Table 4: (Mal-) Adaptivity Scores of Individual Strategies.
Strategy Q
v
Q
c
Cw
A
T
r
T
s
Q
T
C
o
Score 2.5 1.0 1.5 0.5 3.0 3.0 3.0
Strategy C
l
C
m
C
h
P
h
P
m
P
l
P
r
Score 2.5 -3 -5 2 1 0 -10
High scores indicate a high motivation to per-
form protective behaviours, while low or negative
scores signify an inclination towards maladaptive be-
haviours. Packages of the same score will be consid-
ered as part of the same package class.
Assuming that the individual scores will only
change rarely, the overall score can be included in
the file saving valid strategy combinations. Addi-
tionally, by detaching the score computation from the
identification of valid packages, new data regarding
scoring can be used to replace previously computed
scores without requiring a repeated identification of
valid packages.
During runtime, each agent calculates their per-
sonal protection motivation score and chooses a be-
haviour package from the same package class that
corresponds to their score. As mentioned in Section 3,
the filtering of packages resolves conflicting goals by
preventing invalid action combinations. Through the
scoring, agents can prioritize different goals - agents
who value their own safety will likely have high adap-
tivity scores. Social and conformist agents facing
negative reactions from their surroudings will, due to
high perceived costs of protective actions, likely veer
towards maladaptive behaviours. Thus, goals that are
based on needs and values are particularly suitable for
this priorization method through their direct influence
on the computation of the PMT score.
As a result, the complexity of decision-making
is reduced to the computation of a singular score to
choose which package class best matches the state of
the agent.
5.1 Implementation of Strategies
While Section 2.2 introduces the concept of strate-
gies in a general manner, a brief summary of how
strategies are implemented in our model is provided
to show an example of using this method. As shown
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
338

in Table 5, agents have routines for actions and strate-
gies which are applied to them. Strategies, gener-
ally, are tied to the executing agent (although a purely
functional implementation with the agent as argu-
ment is possible) and whether they are currently en-
abled/active or not.
In the Update Strategies Function, the agent calls
Update on each of its strategies, where additional
logic may happen, such as state changes, triggering
of immediate actions, or other logic which is state-
dependent. One example from this use case is, in
the case of Q
v
, agents checking whether they are still
feeling sick or if they may end their quarantine sta-
tus. Another example is T
s
, with check for disease
symptoms resulting in the triggering and execution
of a test-taking action. During the Perform Routine,
the agent executes Check Conditions for each strat-
egy and for each action until either one strategy yields
a negative result (violation of conditions for execu-
tion) or all strategies evaluated successfully. For some
strategies, such as T
r
, Check Conditions will always
yield True, since the strategy has no logical influ-
ence on individual actions in the context of routine
behaviour.
5.2 Computational Complexity and
Runtime Evaluation
While a classic approach with ad-hoc plan generation
was not implemented, the pre-compilation of plans
was tested and, using code runtime profiling, found
to have no significant impact on the runtime perfor-
mance of the simulation model due to the computa-
tion of agents’ scores only using constant-time opera-
tions. This was tested on a model with 20.000 agents
for 100 simulation steps.
Additionally, we also examined the runtime com-
plexity of a hypothetical alternative implementation
as visualised in Figure 2. The z-axis uses a loga-
rithmic scale, since linear-scaled values are skewed
beyond visibility by the range of z-values. In op-
tion a, each agent uses a greedy-search-strategy, iden-
tifies feasible plans, evaluates those using constant-
time operations and selects the best option using lin-
ear algorithms. In comparison to that, b applies our
method of binary strategies and filtering using con-
straints, followed by evaluation and selection. Fi-
nally, c depicts the proposed approach in which plans
Table 5: Overview of Agents and the Strategy Interface.
Agent StrategyInterface
Id Name
Routine List of Actions Agent Agent
Strategies List of Strategies Active boolean
update strategies() update()
perform routine() check conditions(Action)
have been generated and filtered for feasibility ahead
of simulation, rather than being a repeated step per-
formed by each agent. Due to the exponential nature
of the SAT problem, this package-based approach sig-
nificantly outperforms greedy computation if the gen-
eration and filtering of plans are performed a single
time ahead of simulations. As such, a mixed strat-
egy still retains benefits regarding communication and
modularity, but provides no better performance than
ad-hoc planning without polynomial heuristics.
These findings show that our method excels for
models with large agent populations and large palettes
of behaviours, since the computational effort primar-
ily depends on the number of agents, rather than the
size or complexity of the action space.
6 DISCUSSION
This contribution presents an efficient approach to
agent-deliberation using pre-computation and strat-
egy patterns as used in software design. With its inte-
gration within the BDI-architecture widely accepted
by developers of ABMs, this method is compatible
with existing standards and practices.
With the examination of voluntary self-protective
behaviours during the COVID-19 pandemic, we
demonstrated a practical implementation of this ap-
proach and compared it to ad-hoc planning by agents.
The main advantage of this method is twofold:
as shown in Section 5.2, this method is efficient and
scalable due to the one-time execution of the most
resource-intensive task, the initial plan generation and
filtering. Additionally, there is a strong abstraction
between code, concept and meaning. Defining be-
haviours and building a matrix can be achieved in
close interdisciplinary exchange with non-technical
experts in a communicable and structured way.
This method’s main downside is the requirement
for expert knowledge to define possible behaviours
and their relationships. With the current rise of Large
Language Models and attempts at including seman-
tic information in training data, reasoning on logical
and inconsistent action combinations might be par-
tially automated in the generation of constraints.
For actions with temporal dependencies, we can
consider planning as NP-complete problem which can
be translated into a satisfiability problem. Therefore,
it is generally possible to include actions with tempo-
ral dependencies (Ullman, 1975). Due to the expo-
nential nature of the #-SAT problem, the scaling for
temporal sequences needs to be examined to verify
performance against heuristic planning algorithms.
In general, performance is a major venue for fur-
Efficient Selection of Consistent Plans Using Patterns and Constraint Satisfaction for Beliefs-Desires-Intentions Agents
339
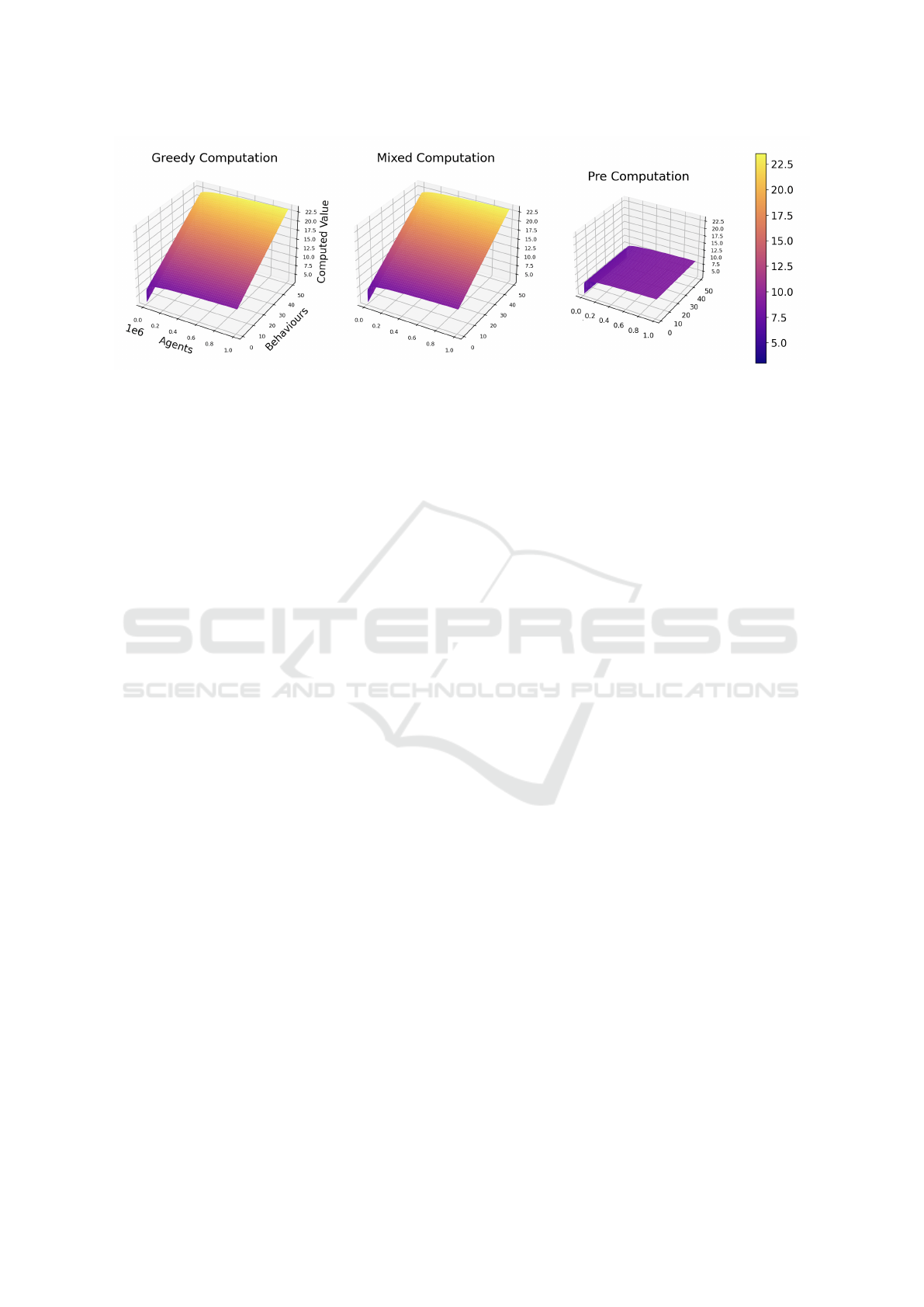
Figure 2: Comparison of Computation Steps depending on number of behaviours and agents using logarithmic scale for (a)
greedy, (b) mixed and (c) pre-computation.
ther research: while we only presented package selec-
tion using a custom scoring system based on the PMT,
there are also other methods for agents to select ap-
propriate behavioural packages. Exploring different
techniques, such as briefly adressed in Section 3.4, is
an important contribution to understand the practical
usefulness of this approach for use cases in which no
appropriate pyschological theory with sufficient sup-
porting data exists. Additionally, unoptimized plan-
ning was assumed in the comparison, without poly-
nomial search heuristics in lieu of exhaustive search.
Moreover, further models with more complex
agent behaviours, including interactions and temporal
dependencies between behaviours, need to be inves-
tigated to examine the range of use cases that can be
represented with our method.
Overall, the authors are optimistic that with more
examples of successful usage, the method of pre-
compiling plans using strategies provides opportuni-
ties to enhance the speed of large ABMs with complex
agents displaying heteregoenous behaviours from a
pre-evaluated selection of action combinations and
sequences.
ACKNOWLEDGEMENTS
This work is the result of research in the context of the
project SEMSAI, supported by the German Federal
Ministry for Education and Research (BMBF) under
the grant number 031L0295A.
REFERENCES
Bert, F. E., Podest
´
a, G. P., Rovere, S. L., Men
´
endez,
´
A. N.,
North, M., Tatara, E., Laciana, C. E., Weber, E., and
Toranzo, F. R. (2011). An agent based model to simu-
late structural and land use changes in agricultural sys-
tems of the argentine pampas. Ecological Modelling,
222(19):3486–3499.
Brailsford, S. C., Potts, C. N., and Smith, B. M. (1999).
Constraint satisfaction problems: Algorithms and ap-
plications. European Journal of Operational Re-
search, 119(3):557–581.
Caillou, P., Gaudou, B., Grignard, A., Truong, C. Q., and
Taillandier, P. (2017). A simple-to-use bdi architecture
for agent-based modeling and simulation. In Advances
in Social Simulation 2015, pages 15–28. Springer.
Christopoulou, A., Giakoumakis, E., Zafeiris, V. E., and
Soukara, V. (2012). Automated refactoring to the
strategy design pattern. Information and Software
Technology, 54(11):1202–1214.
Creignou, N. and Hermann, M. (1996). Complexity of gen-
eralized satisfiability counting problems. Information
and Computation, 125(1):1–12.
Cuevas, E. (2020). An agent-based model to evaluate the
covid-19 transmission risks in facilities. Computers
in biology and medicine, 121:103827.
Gamma, E., Helm, R., Johnson, R., and Vlissides, J.
(1994). Design Patterns: Elements of Reusable
Object-Oriented Software. Addison-Wesley Profes-
sional.
Hedayati, S., Damghanian, H., Farhadinejad, M., and Rast-
gar, A. A. (2023). Meta-analysis on application of
protection motivation theory in preventive behaviors
against covid-19. International Journal of Disaster
Risk Reduction, 94:103758.
Jensen, M., Verhagen, H., Vanh
´
ee, L., and Dignum, F.
(2022). Towards efficient context-sensitive deliber-
ation. In Advances in Social Simulation: Proceed-
ings of the 16th Social Simulation Conference, 20–24
September 2021, pages 409–421. Springer.
Kurchyna, V., Rodermund, S. C., Bae, Y. E., Mertes, P.,
Fl
¨
ugger, P., Berndt, J. O., and Timm, I. J. (2024).
Seeing through the smoke: An agent architecture
for representing health protection motivation under
social pressure. In Proceedings of the 16th Inter-
national Conference on Agents and Artificial Intel-
ligence - Volume 3: ICAART, pages 315–325. IN-
STICC, SciTePress.
Lorig, F., Johansson, E., and Davidsson, P. (2021). Agent-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
340

based social simulation of the covid-19 pandemic: A
systematic review. Journal of Artificial Societies and
Social Simulation, 24(3).
Magessi, N. T. and Antunes, L. (2015). Modelling agents’
perception: Issues and challenges in multi-agents
based systems. In Progress in Artificial Intelli-
gence: 17th Portuguese Conference on Artificial In-
telligence, EPIA 2015, Coimbra, Portugal, September
8-11, 2015. Proceedings 17, pages 687–695. Springer.
Pokahr, A., Braubach, L., and Lamersdorf, W. (2005). A
goal deliberation strategy for bdi agent systems. In
Multiagent System Technologies: Third German Con-
ference, MATES 2005, Koblenz, Germany, September
11-13, 2005. Proceedings 3, pages 82–93. Springer.
Rodermund, S. C., Berndt, J. O., and Timm, I. J. (2018).
Social congtagion of fertility: An agent-based simu-
lation study. In 2018 Winter Simulation Conference
(WSC), pages 953–964.
Rogers, R. W. (1983). Cognitive and physiological pro-
cesses in fear appeals and attitude change: A revised
theory of protection motivation. Social psychology: A
source book, pages 153–176.
Saadi, A., Maamri, R., and Sahnoun, Z. (2020). Behav-
ioral flexibility in belief-desire- intention (bdi) archi-
tectures. Multiagent and Grid Systems, 16:343–377.
Timm, I. J. (2004). Dynamisches konfliktmanagement als
verhaltenssteuerung intelligenter agenten. diski.
Tkachuk, V., Bakhtiari, S. A., Kirschner, J., Jusup, M.,
Bogunovic, I., and Szepesv
´
ari, C. (2023). Efficient
planning in combinatorial action spaces with applica-
tions to cooperative multi-agent reinforcement learn-
ing. Proceedings of The 26th International Confer-
ence on Artificial Intelligence and Statistics,.
Ullman, J. (1975). Np-complete scheduling problems. Jour-
nal of Computer and System Sciences, 10(3):384–393.
Wick, M. R. and Phillips, A. T. (2002). Comparing the tem-
plate method and strategy design patterns in a genetic
algorithm application. SIGCSE Bull., 34(4):76–80.
Wooldridge, M. and Jennings, N. R. (1995). Intelligent
agents: theory and practice. The Knowledge Engineer-
ing Review, 10(2):115–152. Publisher: Cambridge
University Press.
Efficient Selection of Consistent Plans Using Patterns and Constraint Satisfaction for Beliefs-Desires-Intentions Agents
341
