
Grounding a Social Robot’s Understanding of Words with Associations
in a Cognitive Architecture
Thomas Sievers
1 a
, Nele Russwinkel
1 b
and Ralf M
¨
oller
2 c
1
Institute of Information Systems, University of L
¨
ubeck, Ratzeburger Allee 160, 23562 L
¨
ubeck, Germany
2
CHAI-Institut, Universit
¨
at Hamburg, 20354 Hamburg, Germany
Keywords:
Human-Robot Interaction, Cognitive Architecture, Word Associations, ACT-R, ChatGPT.
Abstract:
Social robots and humans need a common understanding of the current situation in order to interact and solve
tasks together. They should know what the other one is talking about and refer to the same things. Word
associations can help to find a common conceptual ground by enabling the robot to learn an association model
of a human counterpart with regard to certain words and take them into account for its actions. This grounding
of abstract words and ideas helps to constrain possible meanings. A model of a cognitive architecture con-
nected to a social robot stores and processes chunks of memory from a language game between the robot and
a human. The robot gives two words and keeps a third in mind. The human is asked to name a word associated
with the two given words. In this way, an association model of the conceptual contexts of the human interac-
tion partner is created. The dialog parts of the robot are generated with ChatGPT from OpenAI. An ACT-R
model analyzes the data received from the robot, searches for suitable associations already in memory and, if
applicable, provides feedback on these associations preferred by the human.
1 INTRODUCTION
Social robots that interact with humans and solve
tasks together with a human partner must have some
kind of model of the world, the situation, the task to
be solved and the person with whom they are inter-
acting. They must speak “the same language” and
be mutually aware of what they are talking about. In
addition, we need robots that can cope with complex
and dynamic settings. Robots must be able to under-
stand and take into account any human-related actions
and behaviors as well as dynamic changes in the envi-
ronment. They need a mental model of the situation.
Kambhampati introduced the term human-aware
AI systems to refer to aspects of intelligence that en-
able successful collaboration between people (Sreed-
haran et al., 2024). This also includes modeling the
mental states of humans in the loop. An algorithm-
centric approach should transition to a human-centric
perspective, which could improve human trust and
thus the acceptance of social robots in human-robot
interaction (HRI).
a
https://orcid.org/0000-0002-8675-0122
b
https://orcid.org/0000-0003-2606-9690
c
https://orcid.org/0000-0002-1174-3323
Flexible, grounded dialog systems are needed for
autonomous social robots that enable an intelligible
dialog with human partners. There are many linguis-
tic ways to express concepts, and the ambiguities in
language cause ambiguity and uncertainty for the dia-
log partner, as a single word can have different mean-
ings. In addition, dialog participants may have differ-
ent language skills. People generally have different
experiences and associations with language and there-
fore use it in different ways. Language games can
be a way to overcome these challenges as they rep-
resent a sequence of verbal interactions between two
agents in a specific environment. Language games
integrate unfamiliar words or expressions in a spe-
cific context, thereby constraining possible meanings
(Steels, 2001). An example of different chains of as-
sociation and understanding could be team, grass :
soccer instead of team, grass : tennis.
Cognitive architectures, with their ability to use
general concepts inspired by the human brain and cre-
ate mental models based on human cognitive abilities,
can be used to add a “human component” to robotic
applications (Werk et al., 2024). A combination of
robot sensing and data processing with such an archi-
tecture offers the possibility to deal with real-world
information from the robot in cognitive models. Cre-
406
Sievers, T., Russwinkel, N. and Möller, R.
Grounding a Social Robot’s Understanding of Words with Associations in a Cognitive Architecture.
DOI: 10.5220/0013144200003890
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 3, pages 406-410
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

ating such models enables the robot to better under-
stand the mindset of a human partner or to act in
a way that is perceived as more natural by humans.
Cognitive architectures refer both to a theory about
the structure of the human mind and to a computa-
tional realization of such a theory. Their formalized
models can be used to flexibly react to actions of the
human collaboration partner and to develop situation
understanding for adequate reactions. ACT-R (Adap-
tive Control of Thought - Rational) is a well-known
and successfully used cognitive architecture (Ander-
son et al., 2004).
Using ACT-R’s chunk system to store and pro-
cess word associations from a language game could
provide human-like associative behavior. Since the
acquisition of initial word association data through a
survey of people would be very effortful, the use of a
large language model (LLM) from OpenAI’s Genera-
tive Pretrained Transformer (GPT, commonly known
as ChatGPT) (OpenAI, 2024) represents a practica-
ble option for generating the initial associations. In
the language game, one word is associated with two
others. These chains of three words are stored in the
ACT-R model via chunks. In this way, the cogni-
tive model learns word associations and stores them
in memory for later re-association of similar strings
of words. The words linked by associations form an
association model as a special kind of mental model
for the conceptual interpretation of the language game
player. Feedback from the model can influence the
system prompt for ChatGPT to achieve convergence
of word associations among players. If the players of
the language game were a human and a social robot,
the robot could develop and use an idea of the associa-
tive contexts of the human with this model. By storing
predefined memory chunks as an a-priori knowledge
in declarative memory, it is even possible to narrow
down the topic area from which the words to be asso-
ciated should originate. This leads to our hypothesis:
Hypothesis. Building an association model us-
ing ACT-R’s chunk system enables a social robot to
achieve human-like associative understanding.
In the following, we explain our ideas on this ap-
proach, provide an insight into the ongoing work and
summarize initial findings.
2 RELATED WORK
Word associations are useful for generating creative
combinations of related words (Gross, 2016). Seman-
tic coherence, on the other hand, is seen as a metric
related to point-by-point mutual information, or the
ability to use the broader context of a story or sentence
and the semantic relationships between words to aid
understanding and interpretation of spoken and writ-
ten language (Mimno et al., 2011; Silverman, 2013).
Semantic coherence can be used to distinguish
machine-generated text from human-generated text.
Bao et al. proposed an end-to-end neural architec-
ture that learns semantic coherence of text sequences
for this purpose (Bao et al., 2019). H
¨
uwel et al. used
semantic interpretations of utterances as a basis for
multi-modal dialog management in a speech under-
standing component for situated human-robot com-
munication (Huwel et al., 2006). In combination with
gestures they generated the most likely semantic inter-
pretation of the utterances and an interpretation with
respect to semantic coherence.
Significant word associations that are unique to a
document were used as a method for automatically
composing poems using this document as inspira-
tion (Gross, 2016). In an earlier approach Gross et
al. achieved the semantic coherence of new poems
by using semantically connected words (Gross et al.,
2012).
The association of meanings to words in manipu-
lation tasks on objects was investigated by Krunic et.
al (Krunic et al., 2009). A word-to-meaning associa-
tion could be learned even without consideration of a
grammatical structure and led to the robot’s own un-
derstanding of its actions. Rasheed et al. investigated
the learning and understanding of abstract words with
respect to the symbol grounding problem, focusing
on the development of cognitive processes in robots
(Rasheed et al., 2015). They elucidated concepts of
grounded cognition with respect to the representation
of abstract words using the robot’s sensorimotor sys-
tem.
Birlo et al. used a cognitive system based on ACT-
R for their concept of robot self-awareness in an em-
bodied robotic system (Birlo and Tapus, 2011). They
focused on the representation of internal states of the
robot, which processed external states from the real
world and created its own interpretation of what it per-
ceived. This robot self should be able to intervene in
processes that control the robot.
Words can be understood as propositions and as-
sociated words can improve subsequent processes.
Zhang et al. showed how an LLM could be controlled
with a probabilistic propositional model (Zhang et al.,
2022).
In this work, we use an LLM to generate word as-
sociations for a social robot, and a cognitive architec-
ture connected to the robot to store and process human
associations to these words.
Grounding a Social Robot’s Understanding of Words with Associations in a Cognitive Architecture
407
3 METHODS
We thought of a language game in which a third word
is to be associated with two related words. A robot
names two words to its human teammate, to which
it and the human should associate a third word. We
used GPT-4o to create the conversational parts of the
robot. The LLM was instructed via system prompts
to understand the rules of the game and everything
we needed it to output.
Our aim was for the robot to learn the concep-
tual interpretation of certain words of the human with
whom it is playing this game. To do this, it stored
the respective word associations that the human men-
tioned for the two given words in the memory of the
cognitive model as a chain of these three words. If
two of these three words occurred again in the course
of the language game, the association model remem-
bered the combination and sends the word that the hu-
man thought of in this context to the robot application.
For our studies we created a robot application for
the humanoid social robot Pepper (Aldebaran, United
Robotics Group and Softbank Robotics, 2024). In a
dialog with humans, this robot application forwarded
utterances of the human dialog partner as input to the
OpenAI API, which returned ChatGPT’s answer as
response. With each API call, the entire dialog was
transferred to the GPT model. This allowed the model
to constantly ‘remember’ what was previously said
and refer to it as the dialog progresses. The text re-
turned by the API was forwarded to the robot’s voice
and tablet output. The OpenAI API provides various
hyperparameters that can be used to control the model
behavior during an API call. To obtain consistent re-
sponses and exclude any randomness as far as possi-
ble we set the value for temperature to 0.
Since ACT-R offers the technical possibility of in-
tegrating a cognitive model with bidirectional com-
munication into a robot application and thus also
into the control of an LLM (Sievers and Russwinkel,
2024), it should be possible to influence the system
prompts and thus the interpretation of an LLM output
via an association model stored in ACT-R’s declara-
tive memory. To establish a remote connection from
the robot application to ACT-R, the remote interface –
the dispatcher – was used. The ACT-R core software
is connected to this dispatcher to enable access to its
commands. It accepts TCP/IP socket connections that
allow clients to access these commands and provide
their own commands for use. Since a real robot is
not absolutely necessary for testing the system, we
mainly used the robot emulator of the Android Studio
development environment.
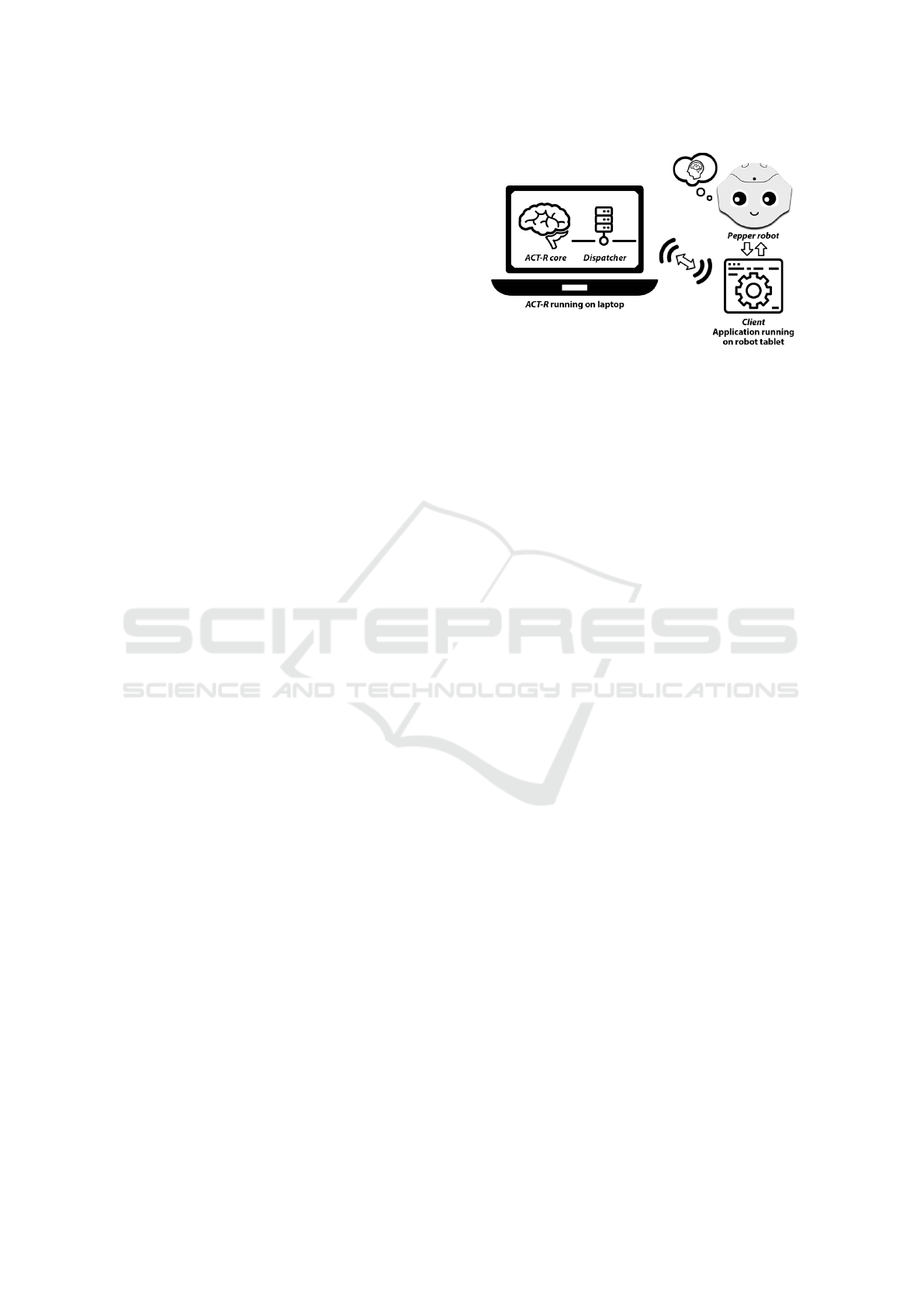
Fig. 1 shows the setup for the bi-directional con-
Figure 1: Connection between ACT-R / Dispatcher and the
robot application.
nection between ACT-R and the client application on
the robot. The dispatcher acts as a kind of server and
is necessary to establish a remote connection between
the robot application as a client and ACT-R.
3.1 Prompting the LLM
We used prompts with Zero-shot prompting (Brown
et al., 2020) for the system role to instruct GPT-4o
to execute the tasks as a completion task. The sys-
tem prompt for the LLM consisted of explanations
on how to play the language game and instructions
to output the words for which a word association was
sought and the associated word, separated by commas
in square brackets. The associated word should be in
round brackets, for example [sun, beach, (summer)].
For testing and development purposes, we added
a list of words to the system prompt from which the
LLM could choose to form the triples for association
in the language game. This list was dynamically ex-
panded to include the words that the human associ-
ated. In this way, we had a manageable number of
possible words for the association. This was helpful
for testing and detecting effects of using the ACT-R
model as opposed to not using it. At the beginning of
the language game the list contained the words “sum-
mer, sun, cactus, beach, waves, sea, wind, water, heat,
towel”. For the ACT-R model, some of these words
were stored as chunk triples in the declarative mem-
ory as a-priori knowledge in the test phase in order to
be able to perceive suitable associations more quickly.
Prompting the LLM and storage of contents in the
declarative memory of ACT-R was carried out in Ger-
man.
The word associations generated by the LLM
were transferred from the robot application to the
ACT-R model to search for associated words in the
declarative memory, as outlined in Figure 2.
In case of an association stored in memory to the
words specified in the language game, the robot re-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
408
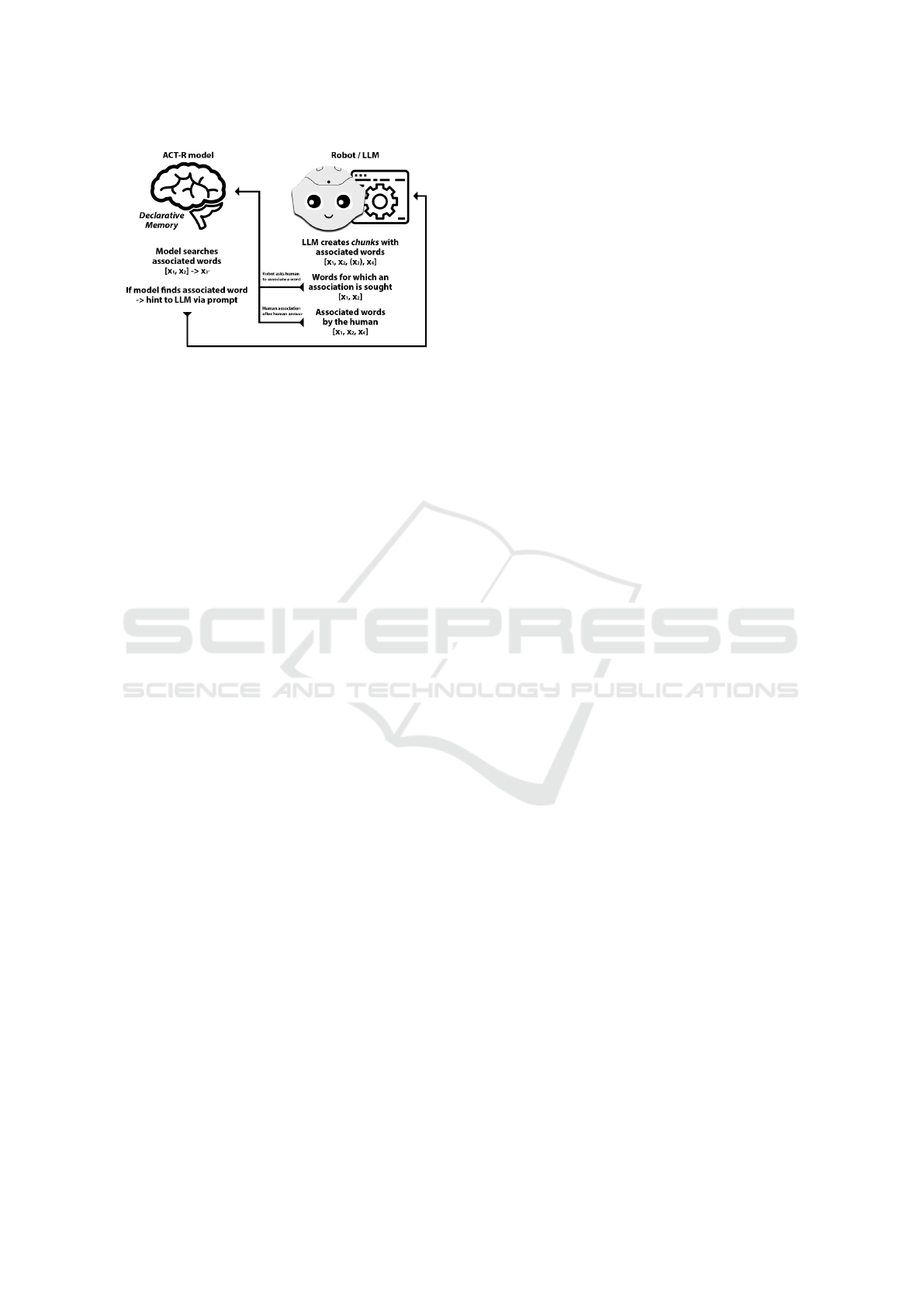
Figure 2: Transfer of word associations to ACT-R and pos-
sible feedback to the LLM.
ceived a hint about the word that had already been as-
sociated by the human. Such a hint would be added to
the prompt as a group of three associated words, with
the instruction that if two of the three words in this
group of three are used, the third word must also be
used in later rounds of the language game. In this way,
information about human associations was passed on
to the LLM.
3.2 Creating an Association Model with
ACT-R
The ACT-R model we developed to guide attention
to a representation of human word associations was
quite simple for our initial tests. It used the chunk
and production based concept of ACT-R with the goal
buffer to exchange data with the robot application.
Ideally, there should be no prefabricated chunks in
declarative memory; all memory contents should be
created as soon as they have been mentioned as asso-
ciated words by the ChatGPT utterances. However, it
turned out that the interaction time required to build
up an association model with significant contents of
associated words then became quite long. Therefore,
to develop and test our system setup, we stored prede-
fined memory chunks in the declarative memory as an
a-priori knowledge and narrowed down the topic area
from which the words for association should origi-
nate.
Perception, ideas and concepts of the real world
must generally be reduced to abstract information for
use in an ACT-R model. The abstraction is necessary
because the ACT-R chunk system only allows a sim-
ple type of information storage in the form of strings.
Our approach of word associations met this need very
well, as we could store the words directly as strings in
a chunk.
For each round of the language game, the model
was given the first two words in the square brackets
– the words for which an association was sought –
as a chunk. This chunk was stored in the declara-
tive memory. In addition, this chunk was specified
as the current goal in order to focus the model’s at-
tention on it. This started a search in ACT-R’s mem-
ory for suitable word associations as shown in Fig-
ure 2. When the human partner had named their word
association, the robot communicated its own associ-
ation. The word named by the human was written
as the fourth word in the series of associated words
to complete the group of three associated words and
stored as a memory chunk with the two initial terms
in the declarative memory of ACT-R. Over time, this
created an association model of the conceptual con-
texts of the human interaction partner. The order of
the associated words within the chunk was irrelevant.
4 RESULTS
This is work in progress, but we already have some
results that support our hypothesis and the underlying
principle. The system prompt of the LLM was supple-
mented as desired with a three-word group from the
declarative memory of the ACT-R model in the case
of a suitable association, which ChatGPT should use
completely instead of using two words from it with
another third. Thus, over time, a list of three-word
groups built up in the system prompt, which had to be
taken into account by the LLM.
However, one difficulty lies in the precise formu-
lation of the instructions in the system prompt so that
the word associations suggested by the LLM always
give priority to the three-word groups introduced via
the cognitive model. Further optimizations and tests
are necessary here.
5 CONCLUSION
A reference to words for which a human association
is already known, for use, for example, in the prompt
optimization of an LLM, could certainly also be im-
plemented programmatically in a different way than
with the help of a cognitive model. However, we were
primarily interested in demonstrating the fundamental
possibility of achieving this using a cognitive archi-
tecture such as ACT-R. Perhaps this paves the way for
further applications for human-robot interaction that
can use the special capabilities of cognitive models
to simulate behavior similar to human cognitive abil-
ities.
Initial tests suggest that the principle on which our
hypothesis is based works and that it is possible to in-
Grounding a Social Robot’s Understanding of Words with Associations in a Cognitive Architecture
409

fluence the LLM output in terms of matching associ-
ations between the game partners. However, further
experiments are needed to optimize the ACT-R model
and the generated system prompts for the LLM, as
well as an evaluation of the quality of the association
models in studies with different people.
In future work, language abstractions could also
be used to describe, for example, situations or objects
that a robot has to deal with. All kinds of real-world
data that the robot can collect via its sensors could be
used as a basis for this. Word associations could be
a good way to find a common ground between robots
and humans and a grounded cognition for the social
robot.
REFERENCES
Aldebaran, United Robotics Group and Softbank Robotics
(2024). Pepper. Technical report.
Anderson, J. R., Bothell, D., Byrne, M. D., Douglass, S.,
Lebiere, C., and Qin, Y. (2004). An integrated theory
of the mind. In Psychological review, volume 111,
pages 1036–1060.
Bao, M., Li, J., Zhang, J., Peng, H., and Liu, X. (2019).
Learning semantic coherence for machine generated
spam text detection. In 2019 International Joint Con-
ference on Neural Networks (IJCNN), pages 1–8.
Birlo, M. and Tapus, A. (2011). The crucial role of robot
self-awareness in hri. In Proceedings of the 6th In-
ternational Conference on Human Robot Interaction,
pages 115–116.
Brown, T., Mann, B., Ryder, N., Subbiah, M., Kaplan, J.,
Dhariwal, P., Neelakantan, A., Shyam, P., Sastry, G.,
Askell, A., Agarwal, S., Herbert-Voss, A., Krueger,
G., Henighan, T., Child, R., Ramesh, A., Ziegler, D.,
Wu, J., Winter, C., and Amodei, D. (2020). Language
models are few-shot learners.
Gross, O. (2016). Word Associations as a Language Model
for Generative and Creative Tasks. PhD thesis, Fin-
land.
Gross, O., Toivonen, H., Toivanen, J. M., and Valitutti,
A. (2012). Lexical creativity from word associa-
tions. In 2012 Seventh International Conference on
Knowledge, Information and Creativity Support Sys-
tems, pages 35–42.
Huwel, S., Wrede, B., and Sagerer, G. (2006). Robust
speech understanding for multi-modal human-robot
communication. In ROMAN 2006 - The 15th IEEE
International Symposium on Robot and Human Inter-
active Communication, pages 45–50.
Krunic, V., Salvi, G., Bernardino, A., Montesano, L., and
Santos-Victor, J. (2009). Affordance based word-
to-meaning association. In 2009 IEEE International
Conference on Robotics and Automation, pages 4138–
4143.
Mimno, D., Wallach, H. M., Talley, E., Leenders, M., and
McCallum, A. (2011). Optimizing semantic coher-
ence in topic models. In Proceedings of the Confer-
ence on Empirical Methods in Natural Language Pro-
cessing, EMNLP ’11, page 262–272, USA. Associa-
tion for Computational Linguistics.
OpenAI (2024). Transforming work and creativity with ai.
Technical report.
Rasheed, N., Amin, S., Hafeez, A., Raheem, A., and
Shakoor, R. (2015). Acquisition of abstract words
for cognitive robots [isi index x category]. Jurnal
Teknologi, 72.
Sievers, T. and Russwinkel, N. (2024). How to use a cog-
nitive architecture for a dynamic person model with a
social robot in human collaboration. In CEUR Work-
shop Proceedings.
Silverman, L. B. (2013). Verbal Semantic Coherence.
Springer New York, New York, NY.
Sreedharan, S., Kulkarni, A., and Kambhampati, S. (2024).
Explainable human-ai interaction: A planning per-
spective.
Steels, L. (2001). Language games for autonomous robots.
IEEE Intelligent Systems, 16(5):16–22.
Werk, A., Scholz, S., Sievers, T., and Russwinkel, N.
(2024). How to provide a dynamic cognitive person
model of a human collaboration partner to a pepper
robot. In Society for Mathematical Psychology.
Zhang, H., Li, L., Meng, T., Chang, K.-W., and Broeck,
G. (2022). On the paradox of learning to reason from
data.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
410
