
Brain-Driven Robotic Arm: Prototype Design and Initial Experiments
Fatma Abdelhedi
1,2 a
, Lama Aljedaani
1b
, Amal Abdallah Batheeb and Renad Abdullah Aldahasi
2c
1
Department of Electrical and Computer Engineering, King Abdulaziz University, Jeddah, Saudi Arabia
2
Control and Energy Management Lab, National Engineering School of Sfax, Sfax University, Tunisia
Keywords: Assistive Device, Robotic Arms, Brain-Computer Interface Technology (BCI), Electroencephalogram (EEG).
Abstract: Advances in robotic control have revolutionized assistive technologies for individuals with upper limb
amputations. Daily tasks, which are often complex or time-consuming, can be challenging without assistance.
Traditional assistive devices often demand significant physical effort and lack versatility, limiting user
independence. In response, the Brain-Driven Robotic Arm project aims to develop an advanced assistive
device that allows individuals with disabilities to control a robotic arm using their brain signals. Utilizing
brain-computer interface (BCI) technology with electroencephalogram (EEG) signals, the system processes
brain activity to generate commands for the robotic arm, offering a more intuitive and efficient assistive
solution. The experimental setup integrates the 6-DOF Yahboom DOFBOT Robotic Arm Kit with the 14-
Channel EPOC X EEG Headset, where the system control is managed via Python software, using the Latent
Dirichlet Allocation (LDA) algorithm for AI-driven tasks.
1 INTRODUCTION
In recent years, significant progress has been made in
developing methods to control robotic systems for
individuals with paralysis or limb amputations.
According to the World Health Organization (WHO)
and the World Bank, an estimated 35-40 million
people worldwide require prosthetic or orthotic
services, yet only one in ten has access to them
(Lemaire, 2018). By 2050, this figure is expected to
rise to over two billion. Additionally, diabetes leads
to a major limb amputation every 30 seconds
globally, resulting in over 2,500 limbs lost daily
(Bharara, M.). To address these challenges,
researchers have focused on non-invasive approaches
like brain-computer interface (BCI) technology,
which uses EEG signals to create a communication
and control link between the brain and external
devices (Shedeed, 2013). The Brain-Driven Robotic
Arm is a BCI-based solution designed to assist
individuals with disabilities by interpreting their brain
signals to control robotic systems.
Advances in BCI and robotics have significantly
enhanced the precision and control of robotic arms.
However, many existing assistive devices remain
limited, often demanding considerable physical effort
a
https://orcid.org/0000-0003-1658-8067
and providing only basic functionality, which
compromises user independence and versatility.
There is a growing need for a more advanced and
cost-effective solution that improves control and
usability. A brain-driven robotic arm offers a
promising alternative, empowering individuals with
severe motor disabilities, such as limb loss, to regain
mobility and independence. By integrating principles
from neuroscience, computer science, and robotics,
this system establishes a direct interface between the
brain and the robotic arm, allowing users to control
the arm’s movements through their brain signals
(Mu, 2024), (Yurova, 2022).
1.1 Robotic Arm
Robotic systems have evolved from their early
industrial automation to becoming versatile tools
across a multitude of industries. In particular, robotic
arms have undergone significant advancements,
becoming increasingly flexible and adept at executing
complex tasks with precision. The general
representation of a dynamic model of a robotic arm is
presented as follows:
M(q) q + C (q, q) q + G(q) = τ
Abdelhedi, F., Aljedaani, L., Batheeb, A. A. and Aldahasi, R. A.
Brain-Driven Robotic Arm: Prototype Design and Initial Experiments.
DOI: 10.5220/0013146700003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 3, pages 427-434
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
427

where vectors q, q
̇
, q
̈
∈ ℝⁿ denote the measured
position, velocity, and the articulatory acceleration
vectors, respectively. Besides:
- M(q) ∈ ℝⁿˣⁿ is a uniformly bounded-symmetric-
positive-definite inertia matrix,
- C(q, q
̇
) ∈ ℝⁿ is the centrifugal and Coriolis
forces' vector,
- G(q) ∈ ℝⁿ presents the vector of gravitational
forces,
- u = τ ∈ ℝⁿ presents the vector of external control
torques and forces applied to the robot's joints,
For the considered robot we have $n=3$, where
the open-loop manipulator comprises three revolute
joints as demonstrated in Figure 1.
Equipped with sensors, robotic arms can perceive
and react to its surroundings, enhancing its
adaptability across diverse environments (Aljedaani,
2024). The integration of various types of end
effectors, such as grippers or specialized tools,
enables these arms to interact effectively with their
surroundings, extending applications across
manufacturing, healthcare, and various other sectors.
Ongoing progress in robotics, sensing technologies,
Artificial intelligence (AI), including collaborative
robotics, is propelling the robot’s evolution to learn
and adapt their actions, further amplifying their
capabilities and expanding their potential
applications .
1.2 Brain-Computer Interface (BCI)
Brain-Computer Interface (BCI) enables interaction
between the human brain and machines, employing
advanced algorithms to analyze brain signals and
recognize user commands. BCI is classified into three
types based on signal acquisition: invasive (inserting
an electrode into the brain), semi-invasive
(positioning electrodes on the brain's surface), and
non-invasive (using scalp sensors) (Ramadan, 2017).
This study focuses on EEG technology, a non-
invasive method, to record brain activity. The
combination of EEG, signal processing, and machine
learning enables direct and intuitive interaction with
a robotic arm, enhancing the independence of
individuals with disabilities in their environment.
1.3 Electroencephalogram (EEG)
The human brain is composed of billions of cells that
control various bodily functions. It consists of
different regions responsible for functions like
movement, vision, hearing, and intelligence.
Brainwaves, which are small electrical signals, are
generated by these brain cells. To record these
brainwaves, electrodes are connected to the scalp, and
this technique is called an electroencephalogram
(EEG) (Zhou, 2023). EEG has been extensively used
in clinical applications and research, including Brain-
Computer Interfaces (BCI) (Biasiucci, 2019). One
significant application of EEG is the brain-driven
robotic arm, which enables direct communication
between the brain and a machine, benefiting
paralyzed or amputated individuals. EEG sensors
capture numerous snapshots of brain activity, which
are then transmitted for analysis and storage in
various formats like computer files, mobile devices,
or cloud databases.
2 PRELIMINARIES AND
PREVIOUS WORKS
Significant progress has been achieved in BCI in
recent years, allowing a direct connection between
the human brain and external technology. This
literature review aims to offer a thorough overview of
the present status of research on brain-driven robotic
arms.
2.1 The Generation and Detection of
EEG Signals
Electroencephalography (EEG) is a method that
involves placing metal electrodes on the scalp to
measure and record the brain's electrical activity. This
activity is generated by the communication between
neurons and produces
continuous and persistent
electrical currents. Hans Berger, the scientist credited
with introducing the term "electroencephalogram"
(EEG), observed that these brain signals exhibit
regular patterns rather than random activity. This
discovery paved the way for various applications that
rely on EEG signals to infer different brain functions.
The detection of electric fields in the brain is made
possible by the coordinated activity of pyramidal
neurons located in the cortical regions (Khosla,
2020). These specialized neurons are critical in
generating and synchronizing the electrical signals
captured by EEG. The EEG technique records
changes in electrical potentials that result from
synaptic transmissions. When an action potential
reaches the axon terminal, neurotransmitters are
released, leading to the formation of excitatory
potentials and the flow of ionic currents in the
extracellular space. The cumulative effect of these
potentials from groups of neurons amplifies the
overall electric field, making EEG signals valuable
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
428
for measurement and analysis. Different regions of
the cerebral cortex are responsible for processing
distinct types of information (Yip, 2023). For
instance, the motor cortex, located in the frontal lobe,
is central to controlling body movement and consists
of three main areas: the primary motor cortex
(Brodmann Area 4), the premotor cortex, and the
supplementary motor area (Brodmann Area 6).The
primary motor cortex is responsible for transmitting
the majority of electrical impulses from the motor
cortex, while the premotor cortex is essential for
movement preparation, particularly for proximal
muscle groups. The supplementary motor area aids in
stabilizing body posture and coordinating
movements. Notably, research indicates that sensory
input to one hemisphere of the brain can evoke
electrical signals that result in movement on the
opposite side of the body, highlighting the cross-
wiring of motor functions between the two
hemispheres (Rolander, 2023).
2.2 EEG Rhythms
To provide a complete understanding of
Electroencephalography (EEG) and the different
mental states of the brain, previous literature reviews
were consulted. According to (Huang, 2021) (Orban,
2022), EEG signals exhibit distinct frequency ranges
corresponding to different types of brain waves. Delta
(δ) waves, with a frequency range of 0.5-4 Hz, are
observed during deep sleep. Theta (𝜃) waves, ranging
from 4-8 Hz, are associated with emotions and mental
states. Alpha (𝛼) waves, in the frequency range of 8-
14 Hz, are typically detected in the frontal and
parietal regions of the scalp during awake or resting
states. Beta (𝛽) waves, ranging from 14-30 Hz, are
prominent during movements and can be observed in
the central and frontal scalp areas. Finally, gamma (𝛿)
waves have a frequency higher than 30 Hz and are
linked to processes such as idea formation, language
processing, and learning.
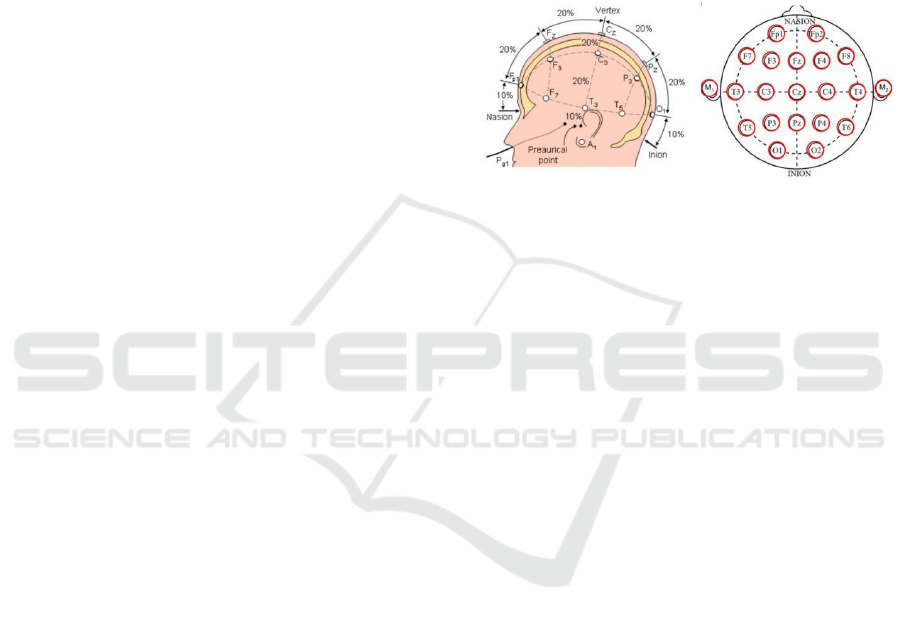
2.3 Electrode Placement and EEG
Recording
As The placement of metal electrodes over the scalp
is crucial for measuring and recording EEG signals.
To capture arm movement, the electrodes need to be
positioned strategically. Research indicates that the
primary region responsible for controlling body
movement is the motor cortex in the brain's frontal
lobe. Several electrode placement systems exist, but
one of the most promising is the (10-20) system, as
mentioned in reference (Orban, 2022). As seen in
Figure 2, this system uses a combination of letters and
numbers to denote specific brain regions and
electrode locations. The letters "F," "T," "P," and "O"
represent Frontal, Temporal, Parietal, and Occipital
regions, respectively. Odd numbers (1, 3, 5, 7) are
assigned to electrodes on the left hemisphere, while
even numbers (2, 4, 6, 8) represent the right
hemisphere. The letter "z" indicates an electrode
along the midline (CAO, 2021). This standardized
system ensures consistent and precise electrode
placement for EEG recordings.
Figure 1: The 10-20 System of Electrode Placement.
In reference (Bousseta, 2018), a study used a 14-
channel EEG sensor and identified that electrodes
AF3, AF4, F3, and F4 were associated with moving a
robot’s arm right, left, up, down.
The frequency band utilized is 8 Hz to 22 Hz.
A study referenced in (HAYTA, 2022) utilized a
64-channel EEG sensor to control a robot's arm
movement along multiple axes (x, y, and z). For this
purpose, twenty EEG were selected within the
frequency range of 8 Hz to 30 Hz. In another study
(Arshad, 2022), researchers developed an intelligent
robotic arm controller including a BCI integrated with
AI to aid individuals with physical disabilities. This
study employed EEG to capture brain activity and
proposed a method for controlling the robotic arm
using various AI-based classification algorithms.
Algorithms such as Random Forest, K-Nearest
Neighbors (KNN), Gradient Boosting, Logistic
Regression, Support Vector Machine (SVM), and
Decision Tree were tested, with Random Forest
achieving the highest accuracy of 76%. The paper also
highlighted the influence of individual variations in
dominant frequencies and activation bandwidths,
which can affect the EEG dataset. The research
provides insights into effective electrode placement for
detecting different arm movements and demonstrates
the feasibility of intelligently controlling a robotic arm
through BCI and AI methods. The proposed technique
offers a reliable and non-invasive approach to assist
individuals with physical disabilities, and the results
highlight the effectiveness of Random Forest
compared to other classification algorithms.
Brain-Driven Robotic Arm: Prototype Design and Initial Experiments
429
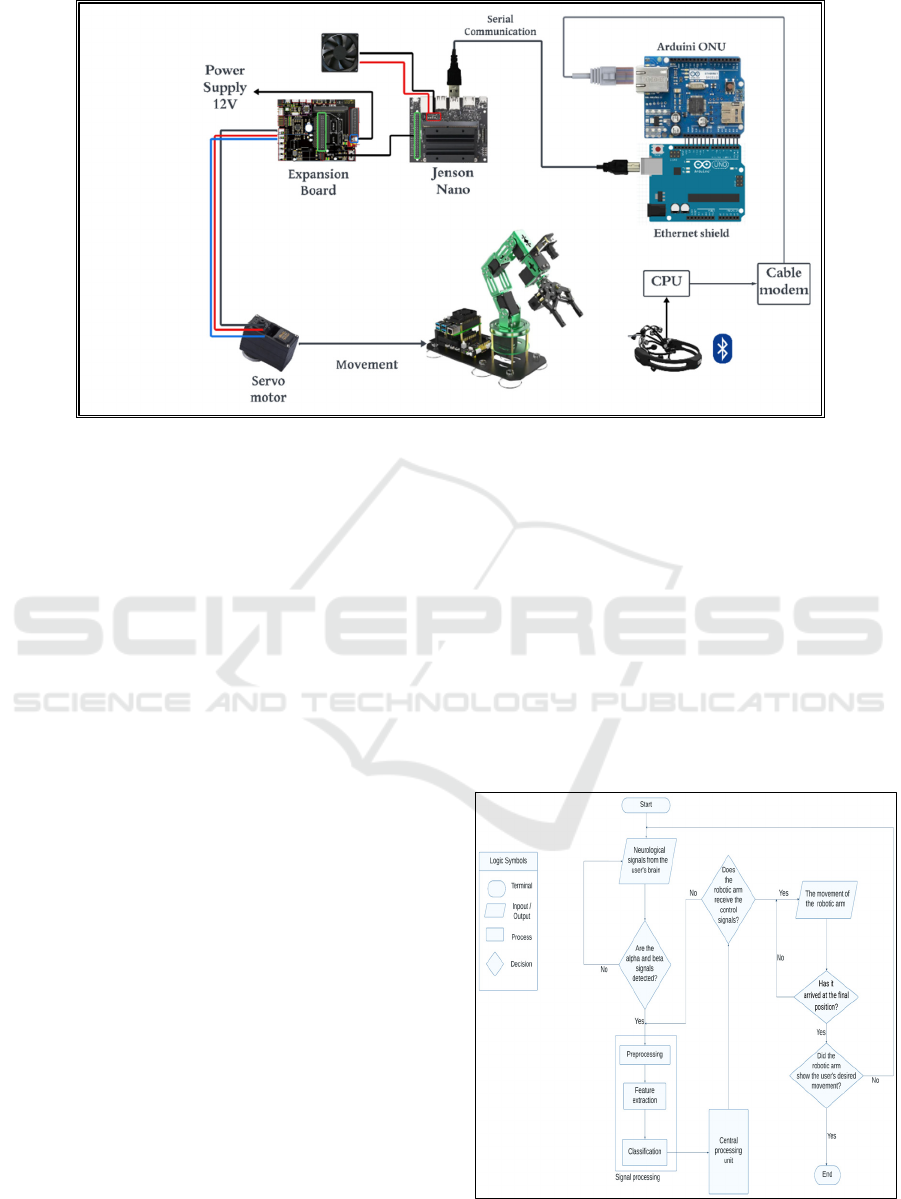
Figure 2: Brain Driven Robotic Arm Circuit Diagram.
3 PROPOSED BRAIN DRIVEN
ROBOTIC SYSTEM
This paper introduces the design of a robotic system
aimed at empowering individuals with severe motor
disabilities by providing functional robotic limb
movements and enhancing their independence. The
brain-driven robotic arm achieves this by precisely
interpreting the user’s brain signals and converting
them into commands that control and manipulate a
robotic arm’s movement.
3.1 Proposed Design Solution
The proposed system integrates cutting-edge
hardware components, a versatile programming
platform, and advanced machine learning techniques.
This combination creates a highly interactive and
sophisticated system that can efficiently interpret
brain signals to effectively control the robotic arm.
The proposed robotic system design involves the
following important steps:
1- EEG wave reading.
2- Transmission of the EEG waves to a
processing unit.
3- Analysis of the waves/signals.
4- Activation of the Robotic Arm for
movement.
Using the LucidChart website, we demonstrate
the circuit diagram of the Brain Control Robotic Arm,
illustrating the visual representation of the circuit
diagram as presented in Figure 3. A 12V DC voltage
supply is used to power the system, which includes a
Jetson Nano microcontroller and a Yahboom Dofbot
expansion board for controlling a robotic arm. The
EEG sensor is connected to the CPU (Laptop) via a
Bluetooth module, enabling wireless communication.
The CPU undergoes a machine learning phase, and
the data is then sent to Arduino UNO through an
Ethernet cable. A serial communication between
Arduino and Jetson Nano transmits real-time data. In
expansion board, each port can accommodate up to 6
cascade motors, and in this configuration, 6 motors
Figure 3: Flow Chart of Process Flow of the Design.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
430

are connected in series into one port. These
connections ensure efficient power
distribution, machine learning capabilities, robotic
arm control, EEG data acquisition, and temperature
regulation within the system.
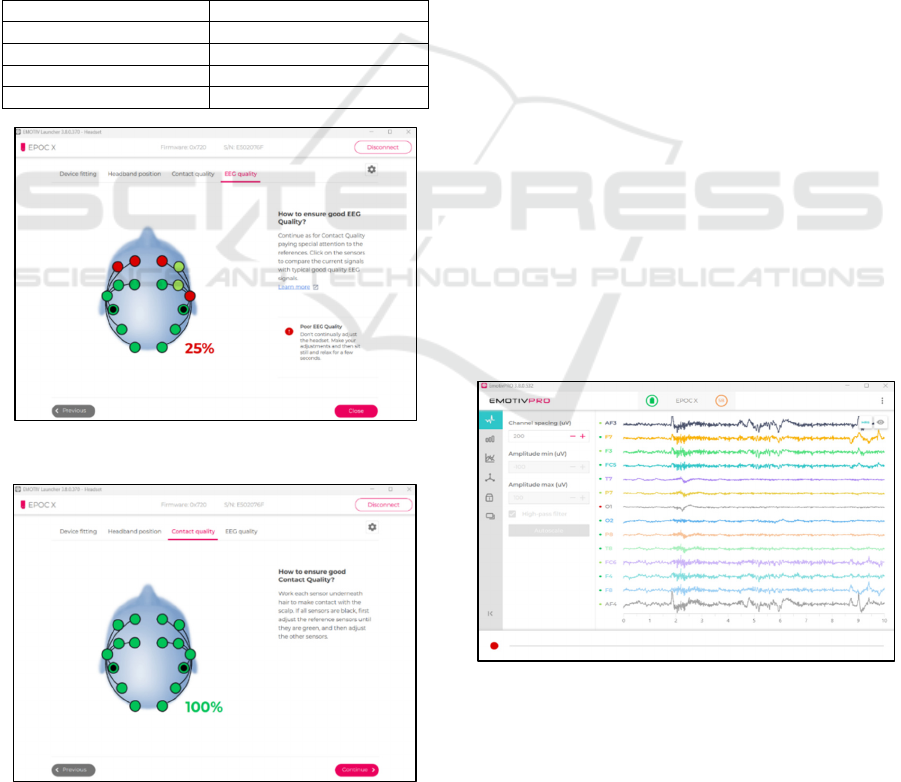
3.2 Flowchart
The flowchart in Figure 4 outlines the sequence of
actions and conditions necessary to achieve a specific
task or outcome in the robotic system. The process
starts with the acquisition of neurological signals
from the user’s brain using EEG. The system then
verifies whether these signals contain specific
frequency patterns, such as alpha and beta waves. If
these frequencies are detected, the signals proceed to
the signal processing block. Next, the system checks
if the robotic arm is successfully receiving the
categorized control signals generated from the
previous step. If the signals are received, they are
processed to control the movement of the robotic arm.
The system subsequently verifies whether the
robotic arm has reached its target position and
executed the intended movement as per the user’s
commands. Once the movement aligns with the
intended commands, the flowchart indicates the
successful completion of the process.
In this work, machine learning plays a significant
role in the project by enabling users to control the arm
using their brain signals. The machine learning model
has several stages. The first stage is preprocessing the
data, then feature extraction, and lastly choosing an
appropriate classification model. In this project, a
large data set is used to reduce the dimensionality of
the dataset, a feature selection technique was
employed, also a filter between 8 and 30 Hz is used
to keep the required frequencies. The Fast Fourier
Transform (FFT) is used as a feature extraction
method. Lastly, the Latent Dirichlet Allocation
(LDA) method is used as a classification method.
4 EXPERIMENTAL RESULTS
4.1 Test Bench Description
The proposed design involves utilizing Yahboom
DOFBOT Robotic Arm Kit, in combination with the
14-Channel EPOC X EEG Headset shown in Figures
5 and 6, respectively.
Figure 4: 6-DOF Yahboom DOFBOT Robotic Arm.
The system is controlled by Jetson Nano and
programmed using Python. Regarding machine
learning, the project employs a Latent Dirichlet
Allocation (LDA) method. Yahboom DOFBOT
Robotic Arm Kit provides a versatile and precise
robotic arm mechanism capable of performing
complex tasks.
Figure 5: The 14-Channel EEG Headset ‘EPOC X’.
In addition, EPOC X enables the system to
capture brain signals and interpret them as commands
or inputs for controlling the robotic arm. The Jetson
Nano and Arduino Uno act as the controller,
coordinating the communication and interaction
between the two main parts of our system: EEG brain
signal extraction and robotic arm movement control.
4.2 EEG Data Extraction Testing and
Results
The EmotivBCI application is designed to capture
and interpret brain signals. Detecting facial
expressions presents the first testing task using EEG
Headset ‘EPOC X’, that has many practical
applications serving accessibility technology,
neuromarketing, psychological research...etc. By
training the system to recognize specific facial
expressions, it becomes possible to map those
expressions to corresponding neural patterns. This
enables the creation of a responsive system that could,
for instance, help individuals with mobility
Brain-Driven Robotic Arm: Prototype Design and Initial Experiments
431
impairments communicate more effectively or
provide insights into a user's emotional response to
stimuli for biomedical research.
In this context, advanced brain-computer
interface (BCI) technology requires a high-quality
connection with the EEG sensor headset worn by the
user. The first brain signal extraction yields real-time
feedback on signal strength across multiple EEG
channels, ensuring the device is properly connected
and signals are accurately captured.
The EEG quality for each position is measured
and visually represented in the sensor map, as
illustrated in Figure 7. However, in order to enhance
the EEG quality, it is necessary to allow for a period
of relaxation. Table 1 provides a comprehensive
representation of various signals’ colors.
Table 1: Colors and their Corresponding Status.
Color Status
Blac
k
No contact detecte
d
Re
d
Poor contact qualit
y
Li
g
ht Green Avera
g
e contact
q
ualit
y
Green Good contact
q
ualit
y
Figure 6: Contact quality 25%.
Figure 7: Contact quality 100%.
This calibration ensures that the BCI system can
distinguish between various states and respond
appropriately. The collected data underwent
processing, as depicted in Figure 9.
In this figure, a multichannel EEG signal readout
with varying amplitudes and frequencies across
different electrodes placed on the scalp. These
electrodes are labeled according to standard EEG
placement nomenclature such as AF3, F7, F3, etc.
The signals exhibit the brain's electrical activity, with
each line representing a different sensor position on
the EEG headset.
The application's interface allows the user to
adjust settings such as channel spacing and amplitude
to optimize the visualization of these brain waves.
4.2.1 Extract Brain Signals (Alpha, Beta,
Theta)
To analyze the signals, the EMOTV PRO software
was utilized. This software offers the capability to
visualize real-time signals while utilizing the EEG
headset sensor. Initially, an attempt was made to
detect the signal in a normal state using two
electrodes, which are AF3 and AF4. However, the
signals exhibited variability and did not demonstrate
a specific pattern, as illustrated in Figure 10.
To analyze the signals extracted from the "Right"
command, four electrodes were utilized: AF3, AF4,
FC5, and FC6. The signals displayed almost similar
patterns for alpha and beta waves, which are
associated with the mental state. However, the theta
waves vary since they are influenced by the emotional
state, as depicted in Figures 11 and 12.
Figure 8: Collected data.
To gather the data, each movement was tested ten
times, and the response time was recorded. The
response time varied across trials, due to various
factors, including user relaxation and other parameters.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
432

Figure 9: Obtained AF3 and AF4 signals in Normal States.
4.2.2 Translate the Brain Signals to
Commands:
The objective is to verify the accuracy of converting
the collected signal into commands using an Arduino.
The process involves a five-second duration to gather
the signal. The testing focuses on three movements:
Right, Drop, and Left. The signal is collected during
these movements, and the most common signal
pattern is identified. By repeating this process ten
times for each movement, an average signal pattern
for movement is derived. The aim is to achieve an
accuracy level of 70% in accurately translating the
signals into corresponding commands. Using the
following equation:
the accuracy for the overall device has been
calculated when testing all movements, to obtain the
accuracy percentage of 76.67%.
It is important to note that the processing stage
involves filtering out noise, identifying characteristic
features of the EEG signals associated with each
expression, and using machine learning algorithms to
improve the recognition of these patterns over time.
Analysing these waves requires filtering the raw EEG
data to focus on the frequencies of interest. The
software might apply band-pass filters to isolate the
frequency range associated with each type of brain
wave. For example, to analyze alpha waves, the
software would use a band-pass filter to isolate
frequencies between 8-12 Hz.
Figure 10: Obtained AF3 and AF4 signals for Right
movements.
Figure 11: Obtained FC5 and FC6 signals for Right
direction move.
4.2.3 Movement of the Robotic Arm
To ensure the reliability of the results, after the
training phase and obtaining brain commands, the
participant was instructed to continuously generate
the mental command of moving the arm to the right.
The data was collected every 5 seconds, and the
command with the highest occurrence was considered
the chosen command.
Figure 12: Output of Serial Communication After Detecting
Right Movement.
Brain-Driven Robotic Arm: Prototype Design and Initial Experiments
433

As illustrated in Figure 13, a specific code such as
"111" is transmitted during serial communication,
which corresponds to the "right" mental command.
As a result, the arm will move to the right at a 35-
degree angle. The same procedure was applied for
“drop” mental command.
5 CONCLUSION
This paper highlights the development of a new design
for a Brain-driven Robotic Arm as an advanced
assistive device for individuals with upper limb
amputations. In fact, the convergence of advancements
in brain-computer interfaces (BCI) and robotics has
created a new era of enhanced precision and control for
robotic arms, addressing the pressing need for assistive
devices that offer greater independence and
functionality for individuals with disabilities. The
project aims to provide greater control and
functionality to enhance amputees' independence, by
utilizing brain-computer interface (BCI) technology
and electroencephalogram (EEG) signals. The
proposed experimental design involves utilizing the 6
DOF-Yahboom DOFBOT Robotic Arm Kit, in
combination with the 14-Channel EPOC X EEG
Headset. The system is controlled by Jetson Nano and
programmed using Python, employing a Latent
Dirichlet Allocation (LDA) method for Artificial
intelligence task. Finally, as traditional devices, often
limited by their demand for substantial physical effort
and lack of versatility, fall short of meeting the daily
needs of these individuals, the development of the
proposed robotic arm emerges as a vital solution,
promising to revolutionize the support available to
individuals with severe motor disabilities, including
limb loss. Future work will focus on advancements in
feature extraction techniques for EEG signals to
enhance control accuracy. Specifically, exploring
advanced methods such as time-frequency analysis and
deep learning-based feature extraction holds
significant potential for improving the discrimination
of relevant brain activity patterns.
REFERENCES
Lemaire, E. D., Supan, T. J., & Ortiz, M. (2018). Global
standards for prosthetics and orthotics. In Canadian
Prosthetics & Orthotics Journal, 1(2).
Bharara, M., Mills, J. L., Suresh, K., Rilo, H. L., &
Armstrong, D. G. (2009). Diabetes and landmine‐
related amputations: a call to arms to save limbs. In
International Wound Journal, 6(1), 2.
Shedeed, H. A., Issa, M. F., & El-sayed, S. M. (2013). Brain
EEG signal processing for controlling a robotic arm. In
8th International Conference on Computer Engineering
& Systems (ICCES), pp. 152–157.
Aljedaani, L. T., Abdelhedi, F., Aldahasi, R. A., & Batheeb,
A. A. (2024, April). Design of a Brain Controlled
Robotic Arm: Initial Experimental Testing. In 2024
21st International Multi-Conference on Systems,
Signals & Devices (SSD) (pp. 209-215). IEEE.
Ramadan, R. A., & Vasilakos, A. V. (2017). Brain
computer interface: control signals review. In
Neurocomputing, vol. 223, pp. 26–44.
ZHOU, Y., et al. (2023). Shared three-dimensional robotic
arm control based on asynchronous BCI and computer
vision. In IEEE Transactions on Neural Systems and
Rehabilitation Engineering.
Biasiucci, A., Franceschiello, B., & Murray, M. M. (2019).
Electroencephalography. In Curr. Biol., vol. 29, no. 3,
pp. R80–R85.
Khosla, A., Khandnor, P., & Chand, T. (2020). A
comparative analysis of signal processing and
classification methods for different applications based
on EEG signals. In Biocybern. Biomed. Eng., vol. 40,
no. 2, pp. 649–690.
Yip, D. W., & Lui, F. (2023). Physiology, Motor Cortical.
Rolander, A. (2023). Analyzing the Effects of Non-
Generative Augmentation on Automated Classification
of Brain Tumors.
Huang, Z., & Wang, M. (2021). A review of
electroencephalogram signal processing methods for
brain-controlled robots. In Cognitive Robotics, vol. 1,
pp. 111–124.
Orban, M., Elsamanty, M., Guo, K., Zhang, S., & Yang, H.
(2022). A review of brain activity and EEG-based
brain–computer interfaces for rehabilitation
application. In Bioengineering (Basel), vol. 9, no. 12, p.
768.
CAO, L., et al. (2021). A brain-actuated robotic arm system
using non-invasive hybrid brain–computer interface
and shared control strategy. In Journal of Neural
Engineering, 18(4), 046045.
Bousseta, R., El Ouakouak, I., Gharbi, M., & Regragui, F.
(2018). EEG based brain computer interface for
controlling a robot arm movement through thought. In
IRBM, vol. 39, no. 2, pp. 129–135.
HAYTA, Ü., et al. (2022). Optimizing Motor Imagery
Parameters for Robotic Arm Control by Brain-
Computer Interface. In Brain Sciences, 12(7), 833.
Arshad, J., Qaisar, A., Rehman, A. U., Shakir, M., Nazir,
M. K., Rehman, A. U., & Hamam, H. (2022). Intelligent
Control of Robotic Arm Using Brain Computer
Interface and Artificial Intelligence. In Applied
Sciences, 12(21), 10813.
Mu, Y., Zhang, Q., Hu, M., Wang, W., Ding, M., Jin, J., &
Luo, P. (2024). Embodiedgpt: Vision-language pre-
training via embodied chain of thought. In Advances in
Neural Information Processing Systems, 36.
Yurova, V. A., Velikoborets, G., & Vladyko, A. (2022).
Design and implementation of an anthropomorphic
robotic arm prosthesis. In Technologies, 10(5), 103.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
434
