
A Comparative Analysis of Hyperparameter Effects on CNN
Architectures for Facial Emotion Recognition
Benjamin Grillo
a
, Maria Kontorinaki
b
and Fiona Sammut
c
Department of Statistics & Operations Research, University of Malta, Msida, Malta
Keywords: Facial Emotion Recognition, Convolutional Neural Networks, Custom Network Architecture, Image Data,
Classification, Hyperparameter Effects, Model Performance.
Abstract: This study investigates facial emotion recognition, an area of computer vision that involves identifying human
emotions from facial expressions. It approaches facial emotion recognition as a classification task using
labelled images. More specifically, we use the FER2013 dataset and employ Convolutional Neural Networks
due to their capacity to efficiently process and extract hierarchical features from image data. This research
utilises custom network architectures to compare the impact of various hyperparameters - such as the number
of convolutional layers, regularisation parameters, and learning rates - on model performance.
Hyperparameters are systematically tuned to determine their effects on accuracy and overall performance.
According to various studies, the best-performing models on the FER2013 dataset surpass human-level
performance, which is between 65% and 68%. While our models did not achieve the best-reported accuracy
in literature, the findings still provide valuable insights into hyperparameter optimisation for facial emotion
recognition, demonstrating the impact of different configurations on model performance and contributing to
ongoing research in this area.
1 INTRODUCTION
Facial Emotion Recognition (FER) is a field of study
in computer vision that focuses on identifying human
emotions from facial expressions, which are essential
for non-verbal communication. It relies on advanced
techniques such as deep learning and facial feature
extraction to detect and analyse subtle changes in
facial muscles. FER has gained significant attention
across various fields, including human-computer
interaction, clinical diagnostics, and behavioural
analysis, according to (Khan et al., 2013; Sariyanidi
et al., 2015). In clinical settings, it is used for
monitoring mental health conditions, such as
detecting early signs of depression or anxiety. In
marketing, FER helps assess customer reactions to
products and advertisements, providing real-time
insights into consumer behaviour. Its applications are
rapidly expanding, particularly in interactive systems
such as virtual assistants and social robots, where
accurate emotion detection enhances user interaction
a
https://orcid.org/0009-0003-6213-6632
b
https://orcid.org/0000-0002-1373-5140
c
https://orcid.org/0000-0002-4605-9185
by making systems more intuitive and responsive.
Additionally, FER is being integrated into security
systems for lie detection and threat assessment,
offering new dimensions of situational awareness.
While FER technology presents many benefits, it also
raises ethical concerns regarding privacy and the
potential misuse of biometric data.
This study uses the FER2013 dataset, a widely
recognised benchmark introduced at ICML 2013.
FER2013 consists of facial images classified into
seven emotion classes - anger, disgust, fear, happy,
neutral, sad and surprise. Although other datasets
such as CK+, JAFFE, or KDEF are available for
studies related to FER, in this study, we focused
solely on FER2013 for several legitimate reasons.
First, FER2013 contains over 35,000 images, making
it significantly more prominent than other datasets,
such as CK+ and JAFFE, with only a few hundred
samples. This larger dataset provides more data for
training deep learning models, which typically
perform better with extensive, diverse datasets.
Grillo, B., Kontorinaki, M. and Sammut, F.
A Comparative Analysis of Hyperparameter Effects on CNN Architectures for Facial Emotion Recognition.
DOI: 10.5220/0013146900003905
In Proceedings of the 14th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2025), pages 587-596
ISBN: 978-989-758-730-6; ISSN: 2184-4313
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
587

Second, FER2013 is collected in real-world
conditions, featuring images captured in uncontrolled
environments with varying lighting, angles, and
backgrounds. This makes it more representative of
real-world scenarios compared to more controlled,
posed datasets like CK+ and JAFFE, which may not
generalise as well to everyday applications.
Additionally, FER2013 is a widely used benchmark
in the field, allowing researchers to compare their
results with existing studies, ensuring consistency
and reproducibility. The larger size and diversity also
reduce the risk of overfitting, making models more
robust in practical applications. Furthermore, using a
single dataset simplifies preprocessing and reduces
computational demands, which is particularly
important when training complex models. In this
study, we also performed a preliminary cleaning of
the FER2013 dataset to improve its quality, though a
more detailed explanation of this process is provided
in Section 2.1. Finally, FER2013 includes a balanced
distribution of common emotions, providing a more
comprehensive test bed for emotion recognition
models, whereas other datasets may suffer from class
imbalance or limited categories. (Tang, 2015) states
that humans correctly identify the emotions in the
FER2013 images between 65% and 68% of the time,
demonstrating the inherent difficulty of emotion
recognition when working with this dataset.
Recent advances in deep learning, particularly
with Convolutional Neural Networks (CNNs), have
led to significant improvements in FER. CNNs are
especially well-suited for image-based tasks due to
their ability to automatically learn spatial hierarchies
of features, removing the need for manual feature
extraction. The literature on FER demonstrates the
effectiveness of CNNs in handling the complexities
stemming from the use of the FER2013 dataset.
(Khaireddin & Chen, 2021) achieved a 73.28%
accuracy on the FER2013 dataset using a fine-tuned
VGGNet architecture, illustrating the potential of
deep CNN models in emotion recognition tasks.
(Liliana, 2019) explored the detection of facial action
units using CNNs and reached a 92.81% accuracy on
the CK+ dataset, emphasising CNNs' ability to
capture subtle facial movements indicative of
emotions. (Hassouneh et al., 2020) extended FER by
integrating electroencephalograph signals with CNNs
and Long Short-Term Memory (LSTM) networks,
highlighting the potential of combining CNNs with
other modalities for enhanced emotion recognition.
Similarly, (Akhand et al., 2021) applied transfer
learning to pre-trained CNNs, fine-tuning models for
emotion-specific tasks, and reported accuracies of
96.51% on the KDEF dataset and 99.52% on the
JAFFE dataset. These studies demonstrate the
adaptability and effectiveness of CNNs in FER across
various datasets and configurations.
In this work, custom CNN architectures are
developed and optimised to improve the accuracy of
FER using the FER2013 dataset. Different
hyperparameters and techniques are experimented on
to observe their effects on the model’s performance
and assess how various configurations influence the
results. Additionally, various architectural
components are explored. While the architectures we
employed did not achieve the highest reported
accuracy compared to the best models in the
literature, we believe our work offers significant
contributions. Specifically, we conducted extensive
experiments testing a wide range of hyperparameter
configurations, providing valuable insights into how
these variations impact model accuracy. This detailed
exploration of hyperparameter tuning - covering
aspects such as architectural depth, augmentation
techniques, learning rate, batch size, dropout rate, and
other regularisation methods - offers a unique
perspective that is often overlooked in studies focused
solely on peak performance. By systematically
analysing how different hyperparameter values
influence model behaviour, our study provides a
deeper understanding of the intricacies involved in
optimising CNNs for FER tasks. Such insights are
critical for researchers looking to refine existing
models or develop new architectures. Additionally,
the findings from our hyperparameter analysis serve
as a practical guide for future research, offering
actionable recommendations for tuning CNNs in this
domain. We believe that this contribution fills an
important gap in the literature and deserves attention
for advancing both practical applications and
theoretical understanding of FER model optimisation.
2 EXPERIMENTAL RESULTS
This section details the dataset used, as well as the
experimental setup, including data pre-processing,
model architecture, and hyperparameter tuning.
Various experiments were conducted to compare the
effects of different approaches, such as data
augmentation techniques, batch sizes, learning rate
scheduling, and regularisation methods. Additionally,
comparisons between basic and deeper architectures
were made, and Keras Tuner (O’Malley, T., et al,
2019) was employed for fine-tuning
hyperparameters. These steps were taken to optimise
model performance and evaluate how each
modification impacted the results.
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
588

2.1 Standardised Procedures
This section outlines the standardised procedures
applied across all experiments. These practices
remained consistent throughout the study to ensure
comparability and maintain methodological rigor.
The Facial Expression Recognition 2013
(FER2013) dataset contains 35,887 grayscale images
at a resolution of 48 × 48 pixels, divided into training
and testing sets, where each image is labelled with
one of seven emotions: anger, disgust, fear,
happiness, neutral, sadness, and surprise. Although
the dataset is widely utilised in facial expression
recognition research, it presents some limitations,
including mislabelled or irrelevant images. To this
end, a manual data cleaning process was conducted
on both sets. This involved systematically reviewing
each image and removing those without a visible face.
By manually verifying the dataset, we ensured that
irrelevant or extremely noisy images were eliminated.
This process enhances the training reliability, leading
to more accurate model evaluation. The cleaned
version of the dataset has been uploaded to Kaggle for
public use (Grillo, 2024).
For each experiment, input images were re-scaled
during pre-processing using the Keras (Chollet &
others, 2015) class ImageDataGenerator. This
normalises pixel values to a range of 0 to 1, instead of
0 to 255. This is a common practice as it reduces
skewness and variance, leading to improved model
performance and faster convergence during training.
The categorical cross-entropy loss function was
used throughout the experiments, as it is well-suited
for multi-class classification tasks such as FER. This
function computes the negative log-likelihood of the
correct class, penalising the model when predicted
probabilities deviate from true labels. Applying a
logarithmic penalty to misclassifications helps the
model assign the highest probability to the correct
class while managing the distribution across other
classes. This enhances the model’s ability to capture
subtle distinctions between facial expressions,
leading to precise weight updates during training and
improving classification accuracy on unseen images.
The Adam (Adaptive Moment Estimation)
optimiser, introduced by (Kingma & Ba, 2017), was
used for all experiments in this study due to its
efficiency and adaptability in handling noisy
gradients and varying learning rates. Adam improves
upon traditional Stochastic Gradient Descent by
adjusting learning rates for each parameter
individually, based on the first and second moments
of the gradients. This allows for dynamic learning rate
adaptation, which enhances convergence speed and
stability. Adam's ability to maintain adaptive learning
rates throughout training makes it particularly
effective for tasks like FER, where variations in data
can lead to challenges in gradient consistency.
Finally, when choosing the most appropriate
hyperparameter values for our FER application, we
focus on two key performance metrics: test accuracy
and precision. Accuracy measures the overall
proportion of images correctly classified by the
model. Precision reflects the quality of the model's
positive predictions. Specifically, we use a weighted
average of precision across all classes, where each
class's precision is weighted by its frequency in the
dataset. For each class, precision is the proportion of
true positive predictions (correct classifications)
among all the positive predictions made by the model
for that class. This ensures that the model is not only
accurate overall but also reliable in making correct
positive predictions for each category.
2.2 Experimental Setup
This section presents the configurations tested to
evaluate their effect on model performance. A variety
of model architectures, hyperparameters, and training
strategies were systematically explored to understand
how adjustments in data augmentation, batch sizes,
learning rate schedules, regularisation techniques,
and architecture depth impacted FER effectiveness.
2.2.1 Model Architectures
For this study, two CNN architectures were
developed: a basic model serves for initial testing and
comparative analysis, and a deeper model for
improved performance through advanced feature
extraction. Both follow a sequential structure for
straightforward layer stacking and flexibility. Minor
configuration adjustments were applied in certain
experiments, as detailed in later sections.
The basic architecture processes 48×48 grayscale
images through four convolutional blocks. Each
block includes a 3×3 convolutional layer, with a stride
of 1 and no padding, prioritising central features over
edge details. Batch normalisation, ReLU activation,
and 2×2 max pooling are applied in each block, with
the number of filters increasing from 32 to 256. A
Global Average Pooling (GAP) layer precedes a
dense layer with 256 units and dropout, followed by
a softmax layer for classification into seven
categories. With 0.47 million parameters, this
architecture provides a computationally efficient
baseline for testing and iterative development.
A Comparative Analysis of Hyperparameter Effects on CNN Architectures for Facial Emotion Recognition
589
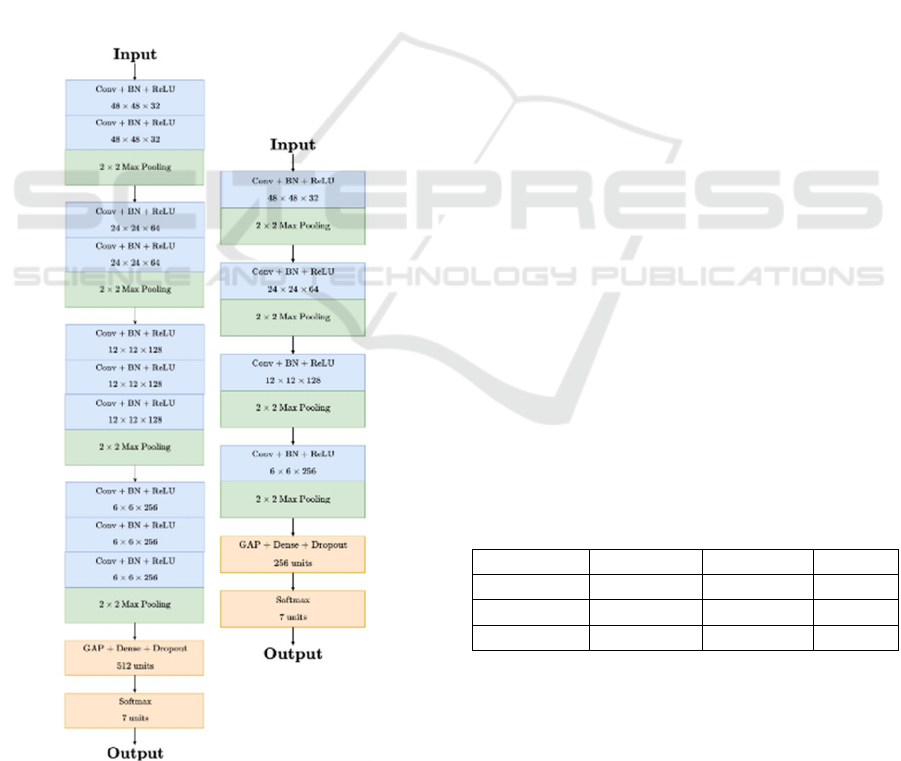
The deeper architecture begins with an input layer
for 48×48 grayscale images and consists of four
convolutional blocks. The first two blocks have two
3×3 convolutional layers, while the third and fourth
blocks include three layers. As in the basic model,
batch normalisation, ReLU activation, and 2×2 max
pooling are applied. Filter sizes double progressively
from 32 to 256. A GAP layer connects to a dense layer
with 512 units and dropout, culminating in a softmax
layer for classification. With 2.05 million parameters,
this adapts elements of VGG16 (Simonyan &
Zisserman, 2015), optimising for low-resolution FER
data while maintaining efficiency.
Both architectures have significantly fewer
parameters than popular models such as VGG16 (138
million) and Inception (6.99 million) (Szegedy et al.,
2014). The deeper model is also more lightweight
than MobileNetV2, which has 3.5 million parameters
(Sandler et al., 2019). Figure 1 illustrates the
structures of these architectures.
Figure 1: Basic (right) and Deeper (left) Architectures.
2.2.2 On-the-Fly vs. Static Augmentation
Experiments using the basic architecture were
conducted on the FER2013 dataset to evaluate the
effects of data augmentation strategies. The model
was trained with a batch size of 64 for up to 100
epochs, with early stopping with a patience of 10 to
prevent overfitting. 20% of the training set was
reserved for validation, with validation loss as the
early stopping metric.
For on-the-fly augmentation, transformations
such as horizontal flipping (50% chance), rotations
(±10°), width and height shifts (up to 20%), and
zooming (80%-120%) in real-time during training
were applied. These were derived from (Khaireddin
& Chen, 2021). These augmentations introduced
variability while keeping the dataset size unchanged.
Static augmentation applied a horizontal flip
(50% chance) and a ±30° rotation to each image,
inflating the dataset by about 250%. Augmented
images were saved to the training directory, making
this setup more memory-intensive and limiting the
variety of transformations possible. A third
experiment with no augmentation was also set up.
On-the-fly augmentation was the most effective,
achieving the highest test accuracy and precision,
while having the smallest loss. This method
introduced variability during training without
increasing memory requirements, enabling a wider
range of transformations and better performance.
Static augmentation, despite using pre-augmented
images, resulted in lower metrics and more
misclassifications. All methods struggled with the
disgust class, with only the on-the-fly model correctly
classifying one instance. From a computational
standpoint, static augmentation was the most
resource-intensive. On-the-fly, while taking longer
than no augmentation, offered better accuracy and
generalisation and will be used in all subsequent
experiments. Table 1 summarises the results.
Table 1: Results of data augmentation experiments.
Type Test Loss Test Acc. Prec.
No Aug 1.602 0.5292 0.5872
On-the-fly 1.161 0.5586 0.5976
Static 1.614 0.5248 0.1748
2.2.3 Optimising Batch Size
These experiments were aimed at isolating the effects
of batch size variation on model performance and
identifying the optimal batch size. Batch sizes of 8,
16, 32, 64, and 128 were tested. A grid search was
conducted, maintaining basic model architecture and
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
590
on-the-fly augmentation, with a maximum of 100
epochs and early stopping with a patience of 12.
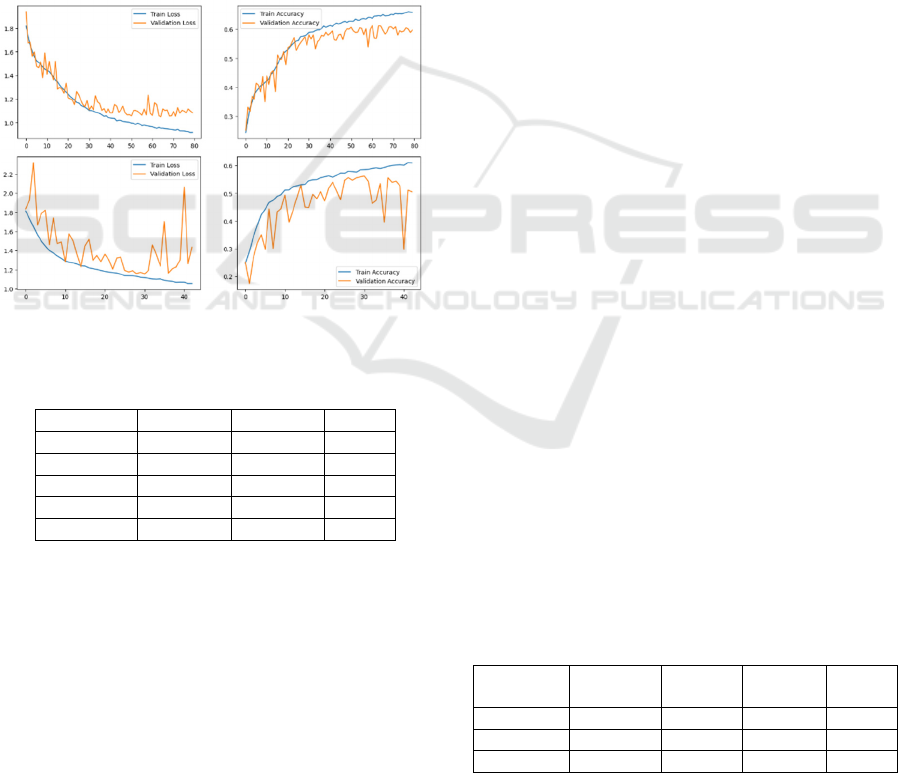
Batch sizes 16 and 8 were closely matched in
overall performance; however, batch size 16 was
chosen for subsequent experiments as it had superior
classification of underrepresented classes. Loss and
accuracy plots indicated that as batch sizes increased,
oscillations became more pronounced, suggesting
greater variance and reduced stability in training, as
illustrated in Figure 2. Larger batch sizes, like 64 and
128, struggled with underrepresented classes, with
batch size 128 struggling particularly with the fear
category and classifying one image in the disgust
class. Based on these findings, batch size 16 will be
used in all subsequent experiments due to its balance
between stability and accuracy across all classes.
Refer to Table 2 for a summary of results.
Figure 2: Loss and accuracy plots of experiments with batch
sizes 8 (top) and 16 (bottom).
Table 2: Results of batch size grid search.
Batch Size Test Loss Test Acc. Prec.
8 1.066 0.6233 0.6344
16 1.008 0.6211 0.6345
32 1.087 0.6071 0.6208
64 1.161 0.5586 0.5976
128 1.591 0.4937 0.6094
2.2.4 Experimenting with Learning Rate,
Validation Set Size Reduction and
Further Regularisation
This section evaluates the impact of learning rate
scheduling techniques, including staircase
exponential decay and dynamic adjustments using
ReduceLROnPlateau
, on the basic and deeper
model. The effects on training and validation metrics
are also analysed, along with the responsiveness of
these strategies on a reduced validation set. Here we
also experiment with L2 regularisation to see how the
model reacts.
2.2.5 Using Exponential Staircase Decay
with Basic Architecture
The first set of experiments in this section examined
the effect of exponential staircase decay on
performance using the basic architecture. The initial
learning rate was set at 0.001, with decay occurring
every
steps_per_epoch*10
at a rate of 0.95, where
steps_per_epoch
represents the number of batches
processed per epoch. This configuration yielded a test
accuracy of 60.98%, which did not surpass the best
accuracy of the previous experiments. The respective
confusion matrix indicated more misclassifications,
suggesting the adjustments did not enhance the
model's discriminative capacity. Additionally, loss
and accuracy plots showed similar oscillation patterns
to previous trials using the same batch size, indicating
that the learning rate modifications failed to smooth
the convergence process or improve training stability.
Two additional experiments tested different decay
schedules. The first adopted a less aggressive rate of
0.96, applied every
steps_per_epoch*8,
resulting
in an accuracy of 60.03%. This facilitated gradual
convergence but did not significantly improve
performance. The second implemented a more
aggressive decay rate of 0.94, applied every
steps_per_epoch*12
, leading to an improved
accuracy of 63.81%. This slower, more aggressive
decay schedule improved performance, particularly
in underrepresented emotions and demonstrated more
stable convergence patterns. The improved
performance on the disgust class highlighted the
effectiveness of a slower decay in learning subtle
features. The results are summarised in Table 3.
Experiments with other parameters produced inferior
results and were not explored further.
Overall, the experiments emphasise the
importance of optimising learning rate decay
strategies to improve model stability, generalisation,
and accuracy, especially for underrepresented classes
Table 3: Summary of results of experiments using
exponential staircase decay with the basic architecture.
Decay
Fre
q
.
Decay
Rate
Test
Loss
Test
Acc.
Prec.
8 0.96 1.095 0.6003 0.6265
10 0.95 1.048 0.6098 0.6196
12 0.94 1.010 0.6381 0.6417
A Comparative Analysis of Hyperparameter Effects on CNN Architectures for Facial Emotion Recognition
591

Figure 3: Loss and accuracy plots of the experiments using
the basic (top) and deeper (bottom) architectures, with
exponential staircase decay (0.94 /steps_per_epoch*12).
Figure 4: Confusion matrices of basic (left) and deeper
(right) architectures, with exponential staircase decay
applied at a rate of 0.94 every steps_per_epoch*12.
2.2.6 Using Exponential Staircase Decay
with Deeper Architecture
This section extends previous findings by applying
the best parameters to the deeper model architecture.
The model was trained for up to 150 epochs, with
early stopping after 15 epochs. While more
computationally demanding, the deeper model
improved performance, achieving 66.33% accuracy.
The deeper model also outperformed the basic
model in overall precision and also across most classes
individually, particularly improving in classifying the
underrepresented disgust class, as shown in the
confusion matrix in Figure 4. Loss and accuracy plots
showed greater stability in training, with reduced
oscillations compared to the basic model, suggesting
improved training dynamics and reduced instability.
Overfitting was also present in both models, as seen in
the plots of Figure 3. These results suggest the deeper
model’s enhanced capacity to recognise subtle features
and provide consistent performance, positioning it as a
strong candidate for further development.
2.2.7 Reducing Validation Set Size
This section investigates reducing the validation set
size from 20% to 10%, primarily to provide more
training data while still maintaining sufficient metrics
for early stopping. Both the basic and deeper models
were tested using a staircase exponential decay with
training extended to 300 epochs and early stopping
patience set to 30 to accommodate for increased
variability from the smaller validation set.
The basic model required 144 epochs with the
smaller validation set, compared to 83 with the larger
set, indicating increased computational demands. The
deeper model showed minimal change in training
duration. Accuracy improved to 65.59% for the basic
model and 66.44% for the deeper model. While both
models saw small gains in precision, the deeper
model did not consistently outperform the basic
model. Surprisingly, the basic model with a reduced
validation set performed better in classifying
underrepresented emotions like disgust, correctly
identifying 65 of 111 instances, as indicated by the
matrix in Figure 5. Loss and accuracy plots also
indicated greater training stability in the deeper
model. Reducing the size of the validation set
benefitted the basic model more significantly than the
deeper model.
2.2.8 Implementing L2 Regularisation
In an effort to further improve generalisation, L2
regularisation with a coefficient of 1e-3 was applied
to each convolutional layer and to the dense layer of
the deeper model. This value was chosen based on the
suggestions of (Goodfellow et al., 2016). This
technique adds a penalty for larger weights to the loss
function, encouraging the model to learn more
general patterns. However, the model showed
considerable variation in emotion classification and
performed the worst overall. While it successfully
identified classes like happy and surprise, it failed to
recognise disgust and also underperformed in fear and
angry. The model also displayed a strong bias toward
the neutral class, as indicated by the confusion matrix
in Figure 7. The model frequently misclassified other
Figure 5: Confusion matrices of basic (left) and deeper
(right) models, with exponential staircase decay (0.94 /
every steps_per_epoch*12) and a smaller validation set.
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
592

emotions as neutral, where the features are often less
distinct and closer to the average across all classes.
The loss and accuracy plots in Figure 6 revealed
erratic training behaviour, with a sharp spike in
training loss and high variability in validation
accuracy, indicating poor learning and generalisation.
Figure 6: Loss and accuracy plots of the experiment with
L2 regularisation.
Figure 7: Confusion matrix of experiment with L2
regularisation.
2.2.9 Implementing ReduceLRonPlateau
Here, we examine the use of the
ReduceLROnPlateau
callback for dynamic learning
rate adjustment, which reduces the learning rate when
no improvement in validation loss is observed over a
set number of epochs. Three experiments were
conducted on the deeper model, all with a patience of
10 epochs and varying the reduction factor: 0.1, 0.12,
and 0.08. All experiments used 10% of the training
set for validation and trained for up to 300 epochs
with early stopping patience at 30 epochs.
Performance across the experiments was closely
matched, with the third experiment, using a reduction
factor of 0.08, achieving the highest accuracy at
68.45%, compared to 68.21% and 66.77% in the other
two, as seen in Table 4. This suggests a moderate
reduction factor improves performance without
sacrificing stability. Evaluation metrics for the
classification report show
ReduceLROnPlateau
outperformed exponential decay, achieving better
metrics, particularly in underrepresented classes.
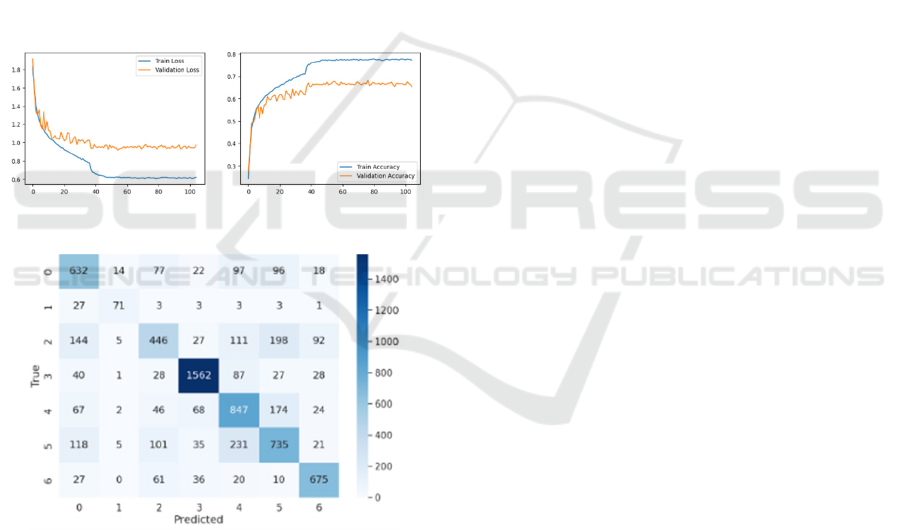
Figures 8 and 9 show the loss and accuracy plots
and confusion matrix, of the best performing model.
Table 4: Summary of results of ReduceLROnPlateau
experiments.
Reduction
Rate
Patience Test
Loss
Test
Acc.
Prec.
0.08 10 0.969 0.6845 0.6853
0.1 10 0.958 0.6821 0.6853
0.12 10 0.971 0.6677 0.6689
Figure 8: Loss and accuracy plots of the best-performing
model from this series of experiments.
Figure 9: Confusion matrix of the best-performing model
from this series of experiments.
2.2.10 Hyperparameter Tuning Using Keras
Tuner
Keras Tuner (O’Malley, T., et al, 2019) is an
advanced framework for hyperparameter tuning in
TensorFlow and Keras models. It employs algorithms
such as Random Search, Hyperband (L. Li et al.,
2018) and Bayesian Optimisation to explore various
hyperparameter configurations. A hypermodel,
serving as a flexible model framework, is defined
with a search space for the hyperparameters. Keras
Tuner then iteratively builds and evaluates models
based on these configurations, using techniques like
early stopping to improve efficiency. In this section,
four targeted experiments are conducted, each
focusing on optimising a specific aspect of the model.
The first experiment aimed to find the optimal
number of dense layer units and initial learning rate
using the
Hyperband
class to balance model capacity
A Comparative Analysis of Hyperparameter Effects on CNN Architectures for Facial Emotion Recognition
593
and convergence speed. Dense layer sizes of 256,
512, 1024, 2048, and 4096 were explored, alongside
learning rates of 0.01, 0.001, and 0.0001. The tuning
ran for up to 50 epochs, with early stopping after 5
epochs without validation loss improvement, and
dynamic learning rate adjustments using
ReduceLROnPlateau. The optimal configuration
was 1024 dense units and a learning rate of 0.0001.
The process took five hours and 48 minutes.
The second experiment focused on optimising
dropout rates using
Hyperband class, to reduce
overfitting while retaining expressiveness. Dropout
rates from 0% to 50% in convolutional layers and
20% to 70% in the dense layer were tested. Early
stopping based on validation loss was applied, with
configurations evaluated for up to 50 epochs. After
nearly 28 hours, the optimal configuration was found
- no dropout for the 32-filter and 128-filter layers,
25% for the 64-filter layer, 5% for the 256-filter layer,
and 25% for the dense layer.
The third optimised batch normalisation
momentum and found a better balance between
stability and adaptability during training.
Hyperband
was used, testing values between 0.89 and 0.99. The
tuner dynamically adjusted the number of epochs up
to 50, with early stopping after 10 epochs of no
validation loss improvement. The optimal value was
0.91, and the search completed in 1 hour and 39
minutes, due to the smaller search space.
The final experiment aimed to optimise the L2
regularisation coefficient to better control overfitting.
RandomSearch class was used to test values from 1e-
6 to 1e-3 . The experiment ran over four trials of 30
epochs, with dynamic learning rate adjustments via
the
ReduceLROnPlateau callback. The optimal L2
regularisation coefficient values were much smaller
than those used in the experiment of Section 2.3.3.4.
The optimal coefficients were found to be 1e-3 for
the first 32-filter layer, 1e-6 for the second, 1e-4 for
the 64-filter and 128-filter layers, 1e-4 and 1e-6 for
the 256-filter layers, and 1e-5 for the dense layer. The
process ran for 7 hours.
Following these searches, we combined optimal
hyperparameters to maximise performance in the
deeper model. Dropout was applied after batch
normalisation, as recommended by (X. Li et al., 2018),
to prevent variance inconsistency. All experiments
were capped at 300 epochs with early stopping after 30
epochs of no validation loss improvement, and
dynamic learning rate adjustments applied.
In the first experiment, we increased the dense
units from 512 to 1024 to evaluate the impact of
capacity on performance. This had no significant
impact, with an accuracy of 66.52%, similar to prior
results. The model trained for 81 epochs without
added computational cost. In the second experiment,
L2 regularisation and batch normalisation momentum
improved accuracy to 67.36% with training extending
to 141 epochs. Additional regularisation reduced
overfitting compared to the first experiment.
In the third and fourth experiments, learning rate
was reduced to 0.0001, following a warm-up at 0.001
for 8 epochs, as suggested by the tuner. The third,
with 1024 dense units, completed in 119 epochs,
while the fourth, adding batch normalisation
momentum and L2 regularisation, took 126. The
fourth showed the best generalisation, with less
overfitting than the others.
2.2.11 Further Architectural Changes
In this section, we experimented further with
architectural changes to the deeper model, including
the addition of fully-connected layers, convolutional
layers, and adjustments to the block structure. This
was to assess whether increasing the network's
capacity, through additional parameters and depth,
would lead to an improved performance.
Table 5 summarises the configurations of the
experiments. The rows represent convolutional
blocks with respective filter sizes and dense layers.
The values correspond to the number of filters in the
block or the number of units in the dense layer. The
final row is the total number of parameters, in
millions,. Results are summarised in Table 6.
Table 5: Architectural configurations of the experiments.
Layer
Type
Exp
1
Exp
2
Exp
3
Exp
4
Exp
5
Conv 32 2 2 2 0 2
Conv 64 2 2 2 2 2
Conv 128 3 3 3 2 3
Conv 256 3 3 3 3 3
Conv 256 0 0 0 0 3
Conv 512 0 0 0 3 0
Dense 1 1024 2048 256 2048 2048
Dense 2 1024 1024 2048 1024 1024
Params 3.23 4.55 2.52 10.80 6.31
Table 6: Summary of results of experiments in this section.
Exp no. Test Loss Test Acc. Prec.
1 0.921 0.6683 0.6677
2 0.933 0.6772 0.6767
3 0.904 0.6700 0.6707
4 0.938 0.6933 0.6929
5 0.952 0.6735 0.6748
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
594
From the loss and accuracy plots, all experiments
exhibited similar learning behaviours. Experiment 4,
the most complex, achieved the best results, with the
highest test accuracy, precision, and disgust class
performance. This suggests that additional layers and
parameters improved the model’s ability.
Experiment 3, with the fewest parameters, had the
lowest test loss, indicating good generalisation
despite having a slightly lower accuracy than
Experiment 4. This shows that simpler models can
still be competitive for generalisation, though they
may struggle with complex or underrepresented data.
Experiment 5, despite having more parameters
than Experiment 3, achieved almost the same
accuracy. This suggests increasing parameters does
not guarantee better performance and highlights
diminishing returns from added complexity without
effective optimisation. Figures 10 and 11 show the
loss and accuracy plots and confusion matrix of
Experiment 4, the best-performing model.
Figure 10: Loss and Accuracy Plot of Experiment 4.
Figure 11: Confusion Matrix of Experiment 4.
3 CONCLUSION
This study investigated CNNs for FER using a clean
version of the FER2013 dataset, focusing on the
impact of architectural modifications, learning rate
schedules, and regularisation techniques. Key
findings demonstrated the benefits of on-the-fly
augmentation, optimal batch sizes, and dynamic
learning rate adjustment. Hyperparameter tuning
using Keras Tuner optimised dense units, learning
rates, dropout, and L2 regularisation, providing
insights into balancing performance and efficiency.
While our models did not achieve the highest
reported accuracy, the findings contribute to
understanding how hyperparameter configurations
affect performance and generalisation. Theoretical
insights suggest that certain architectural
modifications, such as deeper convolutional layers
and dropout placement, improve feature extraction
and stability, which may generalise to other FER
problems or low-resolution datasets. However, the
performance gap compared to state-of-the-art models
may be attributed to the limited complexity of the
architectures used, suggesting further exploration of
deeper or more advanced designs.
Future work should explore the generalisability of
these findings to other architectures, datasets, and
tasks. Assessing performance variability across
repeated runs, different splits of training data, and
random initialisations would strengthen the
robustness of comparative results. Additionally,
addressing class imbalance through weighted classes
and extending augmentation techniques could further
improve generalisation. Validation strategies like k-
fold cross-validation and more extensive architectural
refinements—such as filter size variations or
alternative optimisers—may provide deeper insights
into model behaviour.
REFERENCES
Akhand, M. A. H., Roy, S., Siddique, N., Kamal, M. A. S.,
& Shimamura, T. (2021). Facial Emotion Recognition
Using Transfer Learning in the Deep CNN. Electronics,
10, 1036.
Chollet, F. & others. (2015). Keras. https://keras.io
Goodfellow, I., Bengio, Y., & Courville, A. (2016). Deep
Learning. MIT Press.
Grillo, B. (2024) https://www.kaggle.com/datasets
/bengrillo/fer2013-cleaned
Hassouneh, A., mutawa, a. m, & Murugappan, P. (2020).
Development of a Real-Time Emotion Recognition
System Using Facial Expressions and EEG based on
machine learning and deep neural network methods.
Informatics in Medicine Unlocked, 20, 100372.
Khaireddin, Y., & Chen, Z. (2021). Facial Emotion
Recognition: State of the Art Performance on
FER2013.
Khan, R. A., Meyer, A., Konik, H., & Bouakaz, S. (2013).
Framework for reliable, real-time facial expression
recognition for low resolution images. Pattern
Recognition Letters, 34(10), 1159–1168.
Kingma, D. P., & Ba, J. (2017). Adam: A Method for
Stochastic Optimization.
A Comparative Analysis of Hyperparameter Effects on CNN Architectures for Facial Emotion Recognition
595

Li, L., Jamieson, K., DeSalvo, G., Rostamizadeh, A., &
Talwalkar, A. (2018). Hyperband: A Novel Bandit-
Based Approach to Hyperparameter Optimization.
Li, X., Chen, S., Hu, X., & Yang, J. (2018). Understanding
the Disharmony between Dropout and Batch
Normalization by Variance Shift.
Liliana, D. Y. (2019). Emotion recognition from facial
expression using deep convolutional neural network.
Journal of Physics: Conference Series, 1193, 012004.
O’Malley, T., et al. (2019). Keras Tuner.
Sandler, M., Howard, A., Zhu, M., Zhmoginov, A., & Chen,
L.-C. (2019). MobileNetV2: Inverted Residuals and
Linear Bottlenecks (arXiv:1801.04381). arXiv.
Sariyanidi, E., Gunes, H., & Cavallaro, A. (2015).
Automatic Analysis of Facial Affect: A Survey of
Registration, Representation, and Recognition. IEEE
Transactions on Pattern Analysis and Machine
Intelligence, 37(6), 1113–1133.
Simonyan, K., & Zisserman, A. (2015). Very Deep
Convolutional Networks for Large-Scale Image
Recognition.
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S.,
Anguelov, D., Erhan, D., Vanhoucke, V., &
Rabinovich, A. (2014). Going Deeper with
Convolutions.
Tang, Y. (2015). Deep Learning using Linear Support
Vector Machines.
ICPRAM 2025 - 14th International Conference on Pattern Recognition Applications and Methods
596
