
CuRLA: Curriculum Learning Based Deep Reinforcement Learning for
Autonomous Driving
Bhargava Uppuluri, Anjel Patel, Neil Mehta, Sridhar Kamath and Pratyush Chakraborty
Birla Institute of Technology & Science, Pilani, Hyderabad Campus, Jawahar Nagar, Kapra Mandal,
Medchal District - 500078, Telangana, India
Keywords:
Computer Vision, Deep Reinforcement Learning, Variational Autoencoder, Proximal Policy Optimization,
Curriculum Learning, Autonomous Driving.
Abstract:
In autonomous driving, traditional Computer Vision (CV) agents often struggle in unfamiliar situations due to
biases in the training data. Deep Reinforcement Learning (DRL) agents address this by learning from expe-
rience and maximizing rewards, which helps them adapt to dynamic environments. However, ensuring their
generalization remains challenging, especially with static training environments. Additionally, DRL models
lack transparency, making it difficult to guarantee safety in all scenarios, particularly those not seen during
training. To tackle these issues, we propose a method that combines DRL with Curriculum Learning for
autonomous driving. Our approach uses a Proximal Policy Optimization (PPO) agent and a Variational Au-
toencoder (VAE) to learn safe driving in the CARLA simulator. The agent is trained using two-fold curriculum
learning, progressively increasing environment difficulty and incorporating a collision penalty in the reward
function to promote safety. This method improves the agent’s adaptability and reliability in complex environ-
ments, and understand the nuances of balancing multiple reward components from different feedback signals
in a single scalar reward function.
1 INTRODUCTION
The quest for safer, more efficient, and accessible
transportation has made autonomous vehicles (AVs)
a key technological innovation. Rule-based sys-
tems showed some promise (Moravec, 1990) but
lacked the adaptability and robustness to tackle real-
world scenarios. In the late 1900s, neural network-
based supervised machine learning algorithms were
trained on labeled datasets to predict steering an-
gles, braking, and other control actions based on
sensor data (e.g., ALVINN (Pomerleau, 1988)). In
the early 2000s SLAM techniques such as LiDAR
and Radar improved understanding of vehicle po-
sition and surroundings, improving vehicle naviga-
tion accuracy (Thrun et al., 2005), even in dynamic
lighting and weather conditions - (Li and Ibanez-
Guzman, 2020). The DARPA Grand Challenge in
2005 - (Wikipedia contributors, 2024) which saw
Stanley emerge as the winner, marked significant
P. Chakraborty and S. Kamath are with the Birla In-
stitute of Technology & Science (BITS) Pilani, Hyderabad
Campus. B. Uppuluri, A. Patel, and N. Mehta were with
BITS Pilani, Hyderabad Campus, and are now alumni.
milestones in autonomous driving. Stanley utilized
machine learning techniques to navigate the unstruc-
tured environment, thus recognizing machine learn-
ing and artificial intelligence as essential components
of autonomous driving technology. (Grigorescu et al.,
2019)
Eventually, with the advancement in camera tech-
nology, vision-based navigation became an area of
research, with algorithms processing visual data to
identify lanes, obstacles, and traffic signals. Although
this approach worked very well in controlled envi-
ronments, it faced challenges in dynamic scenarios
and varying light conditions (Dickmanns and Zapp,
1987). Combining the advancements in Deep Learn-
ing and Computer Vision, CNNs were used to ex-
tract feature maps from visual data from the cam-
era mounted on the vehicle. This led to break-
throughs in object detection, lane understanding, and
road sign recognition (e.g., ImageNet) (Krizhevsky
et al., 2012). Despite progress, fully automating
decision-making and vehicle control in dynamic en-
vironments remains challenging, requiring significant
manual feature engineering in ML and DL methods.
Here is where reinforcement learning comes into
Uppuluri, B., Patel, A., Mehta, N., Kamath, S. and Chakraborty, P.
CuRLA: Curriculum Learning Based Deep Reinforcement Learning for Autonomous Driving.
DOI: 10.5220/0013147000003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 3, pages 435-442
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
435

play, showing great potential for decision-making and
controlling tasks. Combining DL with RL, where
agents learn through trial and error in simulated en-
vironments, has significantly improved AV decision-
making - (Mnih et al., 2013). Unlike rule-based sys-
tems, DRL agents can learn to navigate through di-
verse scenarios by trial and error behavior. This kind
of learning also allows the agents to master intricate
maneuvers and handle unexpected situations. (Mnih
et al., 2013) used DQN to showcase driving policy
learning from raw pixel inputs in austere video game
environments. However, a simple DQN (Mnih et al.,
2013) will not work well in real-life applications, such
as driving, as the action space is not discrete but con-
tinuous.
Deep Deterministic Policy Gradient (DDPG) is an
on-policy actor-critic algorithm specifically designed
to handle continuous action spaces by directly param-
eterizing the action-value function (Lillicrap et al.,
2019). The authors of (Kendall et al., 2018) used
this algorithm to drive a full-sized autonomous vehi-
cle. The system was first trained in simulation before
being introduced in real-time using onboard comput-
ers. It used an actor-critic model to output the steer-
ing angle and speed control with the help of an in-
put image. They suggested having a less sparse re-
ward function and using Variational Auto Encoders
(VAEs) (Kingma and Welling, 2022) for better state
representation. DDPG also requires many interac-
tions with the environment, making the training slow,
especially in a high-dimensional and complex envi-
ronment. DDPG training can also be unstable, es-
pecially in sparse reward or non-stationary environ-
ments. This instability can manifest as oscillations or
divergence during training (Mnih et al., 2016). Proxi-
mal Policy Algorithm (PPO) (Schulman et al., 2017b)
was developed to address these issues.
In our work, we use PPO (Schulman et al., 2017b)
and Curriculum Learning (Bengio et al., 2009) for
the self-driving task. To obtain a better representa-
tion of the state, we have used Variational Auto En-
coders (VAE) (Kingma and Welling, 2022) to encode
the current scene from CARLA (Dosovitskiy et al.,
2017), the urban driving simulator (Town 7). Our
paper builds upon the foundational work about ac-
celerated training of DRL-based autonomous driving
agents presented in (Vergara, 2019). Salient features
of our work:
• Introduction of Curriculum learning in the train-
ing process allows the agent to learn the easier
tasks like moving forward initially and as dif-
ficulty increases to make it learn more difficult
tasks, like maneuvering in traffic or avoiding high-
speed collisions.
• We have introduced a refined reward function that
gives a higher reward to the agent to travel at
higher speeds. This is important to increase the
average speed, reducing travel time.
• Unlike our base paper, our reward function takes
into account the collision penalty as well as other
rewards like angle, centering, and speed reward.
This is crucial to make the reward function less
sparse and aid a smoother driving experience.
• The combination of the curriculum learning ap-
proach, involving increasing traffic density and
augmenting the reward function, as well as the
modified reward function, helps in the faster train-
ing process and better average speed of the agent.
We name this method CuRLA - Curriculum Learn-
ing Based Reinforcement Learning for Autonomous
Driving, as curriculum learning is integral to the fea-
tures in our work. These features and the improve-
ments they bring about will be discussed in the paper
in further detail.
2 PRELIMINARIES
In this section, we provide the foundational tools,
concepts, and definitions necessary to understand the
subsequent content of this paper. We begin by intro-
ducing the environment used for training, followed
by a brief introduction to Policy Gradient RL algo-
rithms. Next, we discuss the concept of curriculum
learning, and finally, we detail the encoder used in
our approach.
2.1 CARLA Driving Simulator
The rise of autonomous driving systems in recent
years owes much to the emergence of sophisti-
cated simulation environments. CARLA (Dosovit-
skiy et al., 2017) is a critical resource for researchers
and developers in autonomous driving, providing an
open-source, high-fidelity simulator. Its capabilities
include realistic vehicle dynamics, sensor emulation
(such as LiDAR, radar, and cameras), and dynamic
weather and lighting conditions. Moreover, CARLA’s
scalability enables us to simulate large-scale scenar-
ios involving multiple vehicles and pedestrians inter-
acting in complex urban environments. Its standard-
ized metrics and scenarios facilitate fair comparisons
between different self-driving approaches in the field.
We particularly chose the CARLA simulator as it also
provides a collision intensity whenever a vehicle col-
lides with another object in the environment, and we
use this in the reward function design.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
436
2.2 Policy Gradient Methods
Policy gradient methods (Sutton et al., 1999) are piv-
otal in reinforcement learning for continuous action
spaces, directly parameterizing policies, enabling the
learning of complex behaviors. Unlike value-based
approaches that estimate state/action values, these
methods learn a probabilistic mapping from states to
actions, enhancing adaptability in stochastic environ-
ments. These methods optimize policy parameters
”θ” in continuous action spaces through on-policy
gradient ascent on the performance objective J(π
θ
).
Trust Region Policy Optimization (TRPO) (Schul-
man et al., 2017a) is a type of policy gradient method
that stabilizes policy updates by imposing a KL di-
vergence constraint (Kullback and Leibler, 1951),
preventing large updates. However, TRPO’s com-
plex implementation and incompatibility with mod-
els sharing parameters or containing noise are draw-
backs.
Proximal Policy Optimization (PPO) (Schulman
et al., 2017b) is an on-policy algorithm suited for
complex environments with continuous action and
state spaces. It builds upon TRPO (Schulman et al.,
2017a) by using a clipped objective function for gra-
dient descent, simplifying implementation with first-
order optimization while maintaining data efficiency
and reliable performance. In later sections, we will
see how this has been implemented in our work.
2.3 Curriculum Learning
Curriculum Learning (Bengio et al., 2009) is a strat-
egy aimed at enhancing the efficiency of an agent’s
learning process by optimizing the sequence in which
it gains experience. By strategically organizing the
learning trajectory, either performance or training
speed on a predefined set of ultimate tasks can be im-
proved. By quickly acquiring knowledge in simpler
tasks, the agent can leverage this understanding to re-
duce the need for extensive exploration to tackle more
complex tasks. (Narvekar et al., 2020)
2.4 Variational Autoencoder
Autoencoders (Rumelhart et al., 1986) are essentially
generative neural networks that comprise an encoder
followed by a decoder, whose objective is to trans-
form input to output with the least possible distor-
tions (Baldi, 2011).
VAEs (Kingma and Welling, 2022) excel in re-
inforcement learning by producing varied and struc-
tured latent representations, enhancing exploration
strategies, and adapting to novel states. Moreover,
their probabilistic framework enhances resilience to
uncertainty, which is crucial for adept decision-
making in dynamic settings.
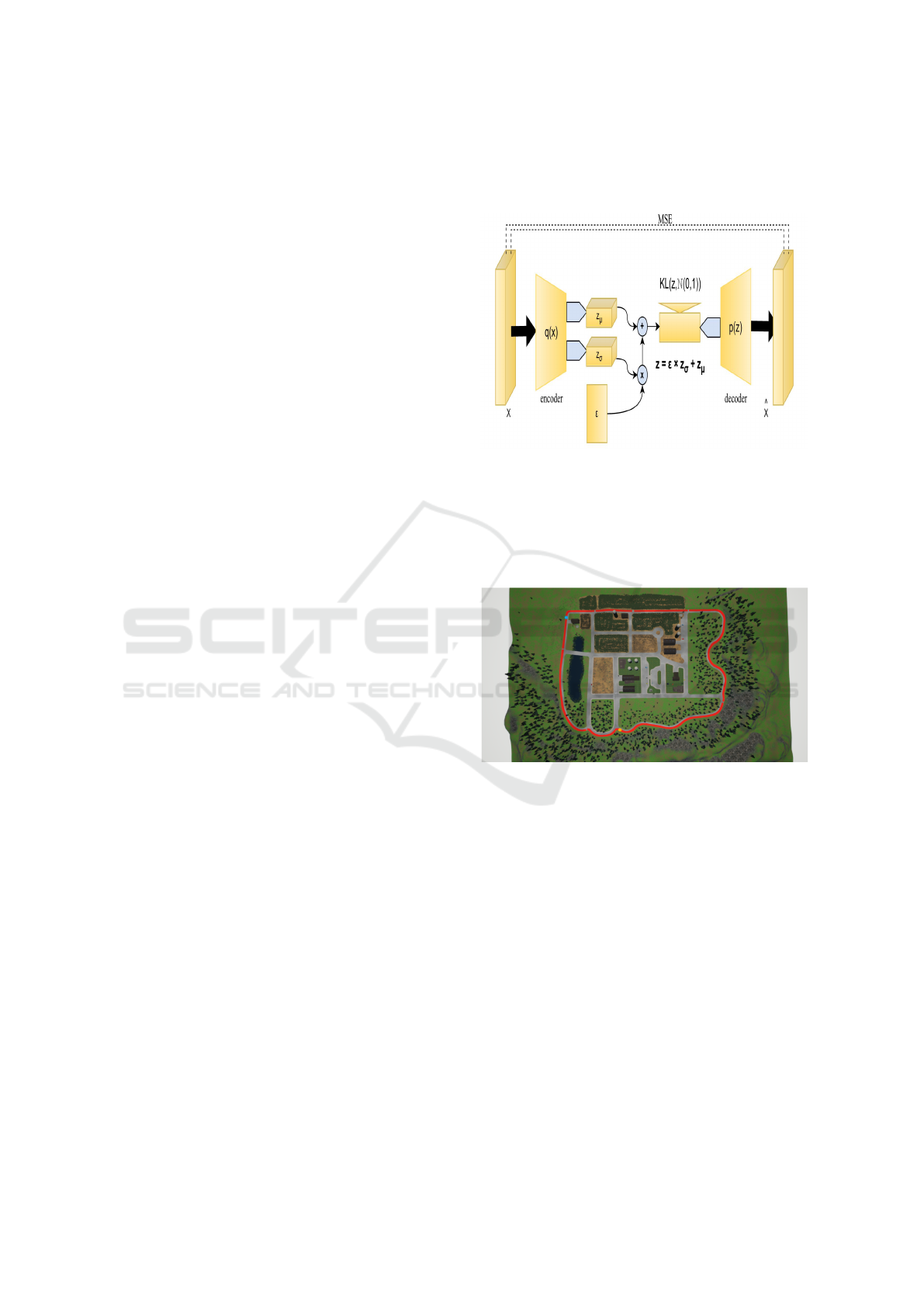
Figure 1: Variational autoencoder architecture.
Figure (1) shows a variational autoencoder archi-
tecture. The encoder operates on the input vector,
yielding two vectors, z
µ
and z
σ
. Then, a sample z
is drawn from the distribution N(z
µ
;z
σ
), which is fed
into the decoder p, producing a reconstructed signal.
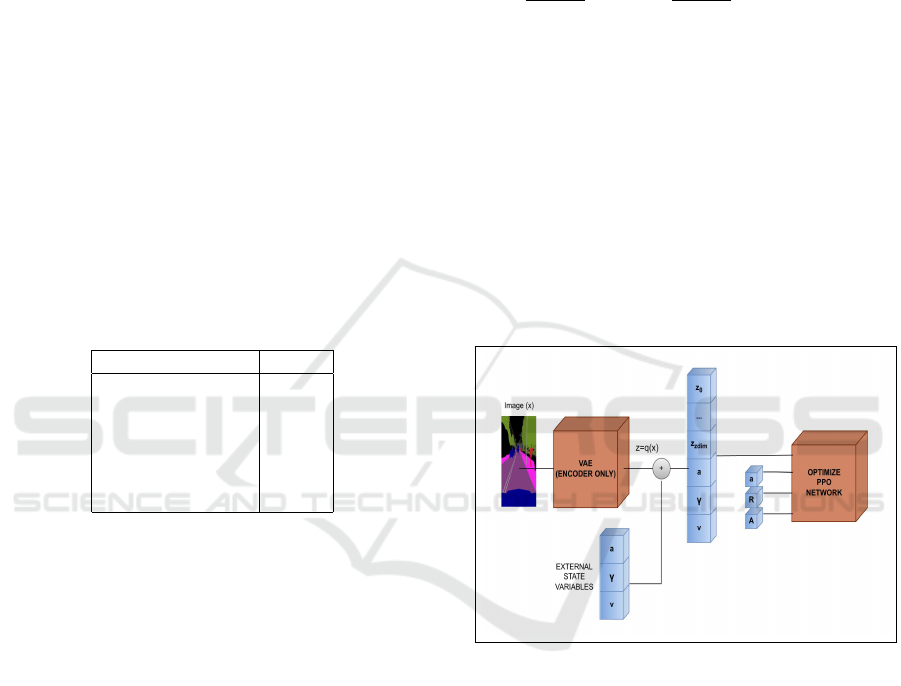
Figure 2: Top down view of the lap in Town 7.
3 EXPERIMENTAL STUDY AND
RESULT ANALYSIS
In this section, we present the experimental setup,
methodology, and results of our study. We start by de-
scribing the experimental environment, followed by a
detailed explanation of the evaluation metrics and the
baseline methods for comparison. We then present
the results of our experiments and finally discuss the
implications of our findings and compare our results
with existing work in the field.
CuRLA: Curriculum Learning Based Deep Reinforcement Learning for Autonomous Driving
437
3.1 Proposed Model and Experimental
Study
Our model is named as CuRLA and the model used
in the base paper is named as Self-Centering Agent
(SCA) for further reference. We also perform exper-
iments using only curriculum learning for the opti-
mized reward function to compare it’s performance to
the two-fold curriculum learning method that is im-
plemented in CuRLA. This model is named One-Fold
CL. We use Town 7 from the list of Towns in CARLA
Lap Environment (Dosovitskiy et al., 2017) as shown
in figure (2). The reason for using this specific town
is that it provides a highway environment without any
exits, thus making our job of end-to-end driving eas-
ier. In our experiments, curriculum learning is em-
ployed by gradually increasing traffic volume and in-
troducing functionalities to the agent in it’s reward
function in stages, allowing it to quickly grasp the
basics of the environment and efficiently tackle more
complex tasks.
Table 1: VAE Parameters.
Hyperparameter Value
z
dim
64
Architecture CNN
Learning rate α 1e − 4
β 1
Batch size N 100
Loss BCE
The VAE (Kingma and Welling, 2022) we
have used serves as feature extractors by com-
pressing high-dimensional observations into a lower-
dimensional latent space. This aids the learning pro-
cess by providing a more manageable representation
for the agent. Variational Autoencoder (VAE) is cho-
sen as it is used for learning probabilistic representa-
tions of the input in the latent space, unlike regular
autoencoders (Rumelhart et al., 1986), which learn
deterministic representations. We use the VAE archi-
tecture from (Vergara, 2019) to encode the state of
the environment, utilizing the pre-trained VAE from
the same study to replicate the encodings. The dataset
used to train the VAE contains 9000 training and 1000
validation examples (total of 10,000 160 × 80 RGB
images), all collected manually from the driving sim-
ulator environment.
We have made use of the state-of-the-art PPO-
Clip (Schulman et al., 2017b) algorithm to optimize
our agent’s policy and to arrive at an optimal policy
that maximizes the return. PPO-Clip clips the pol-
icy to ensure that the new policy does not diverge far
away from the old policy. The policy update equation
of PPO-Clip is given as:
θ
k+1
= argmax
θ
E
s,a∼θ
k
[L(s,a,θ
k
,θ)] (1)
Here, L is given as:
L(s,a,θ
k
,θ) =
min
π
θ
(a|s)
π
θ
k
(a|s)
A
π
θ
k
,clip
π
θ
(a|s)
π
θ
k
(a|s)
,1 + ε,1 − ε
A
π
θ
k
(2)
Here, θ refers to the policy parameters being up-
dated, and θ
k
is the policy parameters currently being
used in the k
th
iteration to get the next iterations pa-
rameters, θ
k+1
. Also, ε is the clipping hyperparameter
defining how much the new policy can diverge from
the old one. The min in the objective computes the
minimum of the un-clipped and clipped objectives.
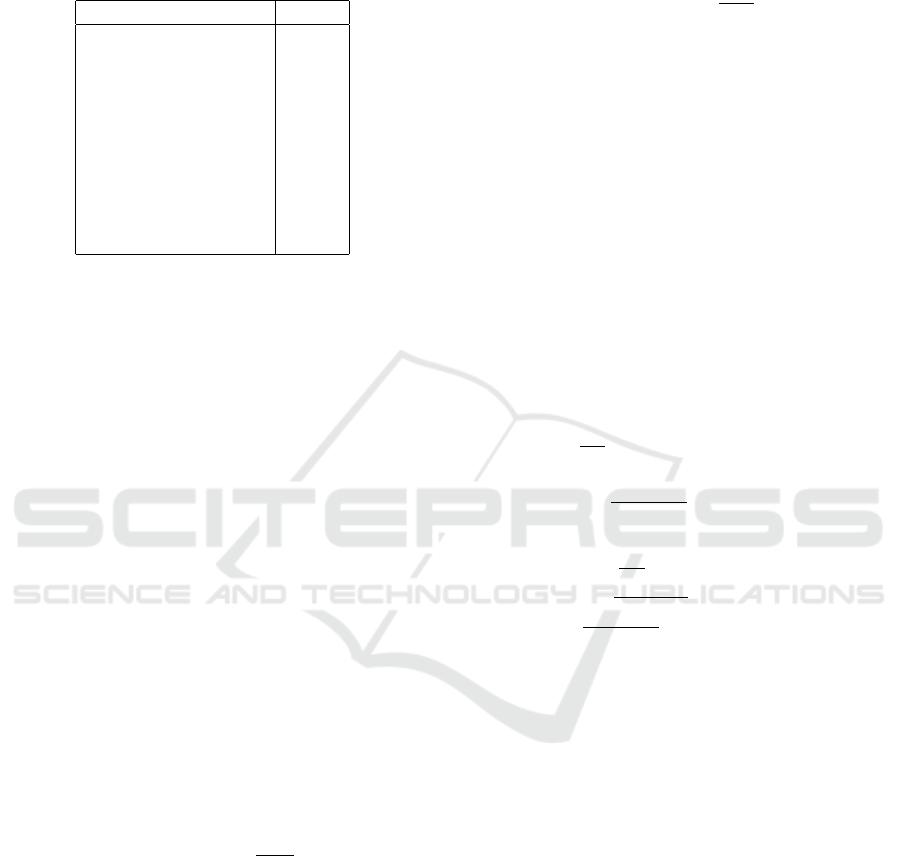
The overall graphical representation of the
PPO+VAE training process we have used in our pa-
per is shown in the figure (3).In the figure (3), the ex-
ternal variables are acceleration, steering angle, and
speed from top to bottom.
Figure 3: PPO+VAE training architecture.
The models are trained with the same parameters
mentioned in (Vergara, 2019). Table 2 shows the
complete list of hyperparameters used in the experi-
ments. All models are trained for 3500 episodes, and
the evaluation is done once every 10 episodes. Cur-
riculum learning is implemented in both CuRLA and
One-Fold CL. After 1500 episodes, traffic and a col-
lision penalty are introduced in CuRLA. In One-Fold
CL, only the collision penalty is introduced after 1500
episodes, and traffic is present from the first episode
itself. An episode ends when the agent finishes three
laps, drifts off the center of the lane by more than 3
metres, or has a speed of less than 1 km/hr for 5 sec-
onds or more. A collision will not lead to the end of
an episode (unless the agent collides and maintains a
low speed under 1 km/hr for 5 seconds and more due
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
438
to the collision). The results we obtain are shown in
Figs [6,8,7,9].
Table 2: Model Parameters.
Hyperparameters Value
Batch size M 32
Entropy loss scale β 0.01
GAE parameter λ 0.95
Initial noise σ
init
0.4
Epochs K 3
Discount γ 0.99
Value loss scale α 1.0
Learning rate 1e − 4
PPO-Clip parameter ε 0.2
Horizon T 128
3.2 Improvements Made
3.2.1 Reward Function Optimization
Keeping the architecture of the VAE and the RL al-
gorithm the same as the original paper, we chose to
change the original reward function. The original re-
ward function (3) has 3 components: the angle reward,
the centering reward, and the speed reward. Our re-
vised reward function (4) has 4 components, the three
original components, and we have also added a col-
lision penalty, to encourage the agent against unsafe
driving behaviour.
r = r
α
· r
d
· r
v
(3)
r
′
= r
α
· r
d
· r
v
′
+ r
c
(4)
1. Angle Reward: The angle reward component en-
sures that the agent is aligned with the road. An-
gle α, determines the angle difference between the
forward vector of the vehicle (the direction the
vehicle is heading in) and the forward vector of
the vehicle waypoint (the direction the waypoint
is aligned with). Using α, the angle reward r
α
is
defined by
r
α
= max
1 −
α
α
max
,0
(5)
where α
max
= 20
◦
(π/9 radians).
This ensures that the angle reward r
α
∈ [0,1], and
that the angle reward linearly decreases from 1
(perfect alignment) to 0 (when the deviation is 20
◦
or more).
2. Centering Reward. The centering reward factor
ensures that the driving agent stays to the center
of the lane. The usage of a high-fidelity simulator
like CARLA enables us to have a precise mea-
surement of distance between objects in the envi-
ronment. To reward the agent for staying within
the center of the lane, we use the distance d be-
tween the center of the car and the center of the
lane to define the centering reward by
r
d
=
1 −
d
d
max
(6)
where d
max
= 3.
This ensures that the centering reward component
r
d
∈ [0, 1] (as the episode terminates when the
agent goes off center by more than 3 metres) and
that r
d
is inversely proportional to d, encouraging
more centering for the agent while driving.
3. Speed Reward. While keeping the angle and
centering reward the same for all three agents,
we change the speed reward component. The
minimum speed v
min
, maximum speed v
max
, and
target speed v
target
are taken as 15 Km/hr, 105
Km/hr and 60 Km/hr respectively, and are kept as
the same for both the original and updated speed
reward components. The original speed reward
component r
v
and the new speed reward compo-
nent r
v
′
are then defined by
r
v
=
v
v
min
, v < v
min
,
1, v
min
≤ v ≤ v
target
,
1 −
v−v
target
v
max
−v
target
, v
target
< v ≤ v
max
(7)
r
v
′
=
0.5 ·
v
v
min
, v < v
min
,
1 −
v
target
−v
v
target
−v
min
, v
min
≤ v ≤ v
target
,
v
max
−v
v
max
−v
target
, v
target
< v ≤ v
max
(8)
where v is the current speed of the agent.
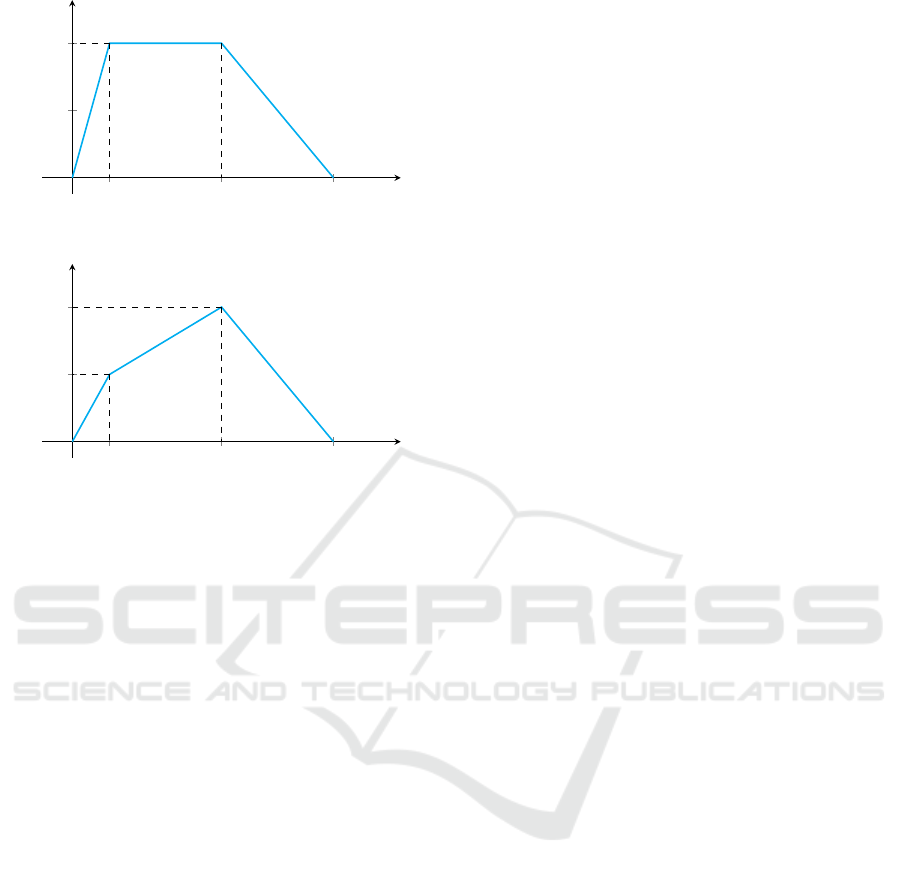
As seen in the graphs (Fig.4 & Fig.5), in the orig-
inal speed reward function (Fig.4), the graph is
constant in the range [v
min
, v
target
] and receives
the highest reward of 1. This is misleading as
the agent can get confused, deciphering the mini-
mum speed as the target speed itself, as it is get-
ting a constant reward of 1 at either speed. This
ensures that the agent will drive slower, as ensur-
ing a higher centering and angle reward at a lower
speed is much easier than at a higher speed. To
rectify this, we have replaced the constant graph
in [v
min
, v
target
] with an increasing function (see
Fig.5) to prioritize getting as close to the target
speed as possible without losing too much perfor-
mance on the angle and centering reward compo-
nents. Both CuRLA and One-Fold CL use this
revised reward function, whereas SCA uses the
original reward function.
4. Collision Penalty. A collision penalty factor was
introduced for both One-Fold CL and CuRLA to
CuRLA: Curriculum Learning Based Deep Reinforcement Learning for Autonomous Driving
439
15 60 105
0.5
1
Speed
Reward
Figure 4: SCA Reward Function.
15 60 105
0.5
1
Speed
Reward
Figure 5: CuRLA & One-Fold CL Reward Function.
ensure the agent explicitly learns the behaviour of
safe driving, avoiding collisions with other objects
and vehicles in the environment. The advantage
of using a simulator like CARLA also enables us
to get a collision intensity (I
c
) value between the
agent and other objects in the environment, which
we use to devise the collision penalty. The colli-
sion penalty r
c
is defined by
r
c
= max(−1,−log
10
(max(1,I
c
))) (9)
This penalty ensures r
c
∈ [−1,0], thus ensuring
r
′
∈ [−1,1].
3.2.2 Curriculum Learning
In CuRLA, curriculum learning is implemented in a
two-fold manner. Firstly, we gradually increase the
traffic volume of our simulation environment as the
number of episodes increases. The agent gets to fo-
cus on learning to drive in a traffic-free environment
initially and then slowly navigate through traffic in
the later epochs. Secondly, the functionalities of the
agent are gradually added. As the agent learns to drive
in a traffic-free environment, we introduce a collision
penalty while increasing the volume of traffic to teach
it to avoid collisions with other vehicles. The reason-
ing behind adding this collision penalty is that while
the current reward function accounts for smooth driv-
ing, it does not punish the agent enough for colliding
with the other vehicles. All agents have been trained
with traffic included in the roads, making a collision
penalty extremely important. This method of training
helped the agent to learn the basics of the environment
quickly and enabled it to learn harder tasks efficiently
while also keeping safety as a factor.
3.3 Metrics and Result Analysis
The models are compared on two metrics - distance
travelled and average speed. These metrics are cho-
sen as they capture an accurate representation of the
trade-off between efficiency and performance in au-
tonomous driving scenarios. The distance traveled
metric emphasizes the model’s capability to maxi-
mize the length of the path it traverses, reflecting
its ability to sustain long journeys without interrup-
tion. Conversely, the average speed metric accounts
for both the distance covered and the time taken to
complete the journey, offering a thorough assessment
of the model’s performance in terms of both speed
and efficiency. Evaluating these metrics provides a
detailed understanding of how each model balances
speed and distance, which are essential factors in as-
sessing the overall effectiveness of autonomous driv-
ing systems. The evaluation of our models against
the base model provided insightful findings. (All
graphs have been considered with a smoothing factor
of 0.999)
In our assessment, for the metric of Distance Trav-
eled, we measure it by the number of laps traveled by
the vehicle, where 100% is considered as one lap fin-
ished. As it can be seen in Fig.6 & Fig.7, CuRLA
and SCA have similar performance, completing ap-
proximately 1.5 laps on average in training and 0.3
laps in evaluation. Meanwhile, One-Fold CL did
worse than both CuRLA and SCA, completing ap-
proximately 1.25 laps in training and 0.25 laps in eval-
uation. CuRLA does perform slightly better in train-
ing compared to SCA, which performs slightly better
in evaluation. However, from the graph it can be seen
that CuRLA had a consistent learning curve while
training compared to SCA, which dropped in perfor-
mance and then picked back up. One-Fold CL also
performed comparably to both models, albeit slightly
worse. This attests to the improvement in perfor-
mance that two-fold curriculum learning shows over
simple curriculum learning during training and train-
ing without curriculum learning.
The assessment of the metric of Average Speed
highlighted the strengths of our assumption in chang-
ing the underlying speed reward component. During
training, as can be seen in Fig.8, both CuRLA and
One-Fold CL significantly outperform SCA reaching
average speeds of 22 Km/hr and 20 Km/hr in train-
ing, compared to SCA’s 14 Km/hr. The difference is
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
440
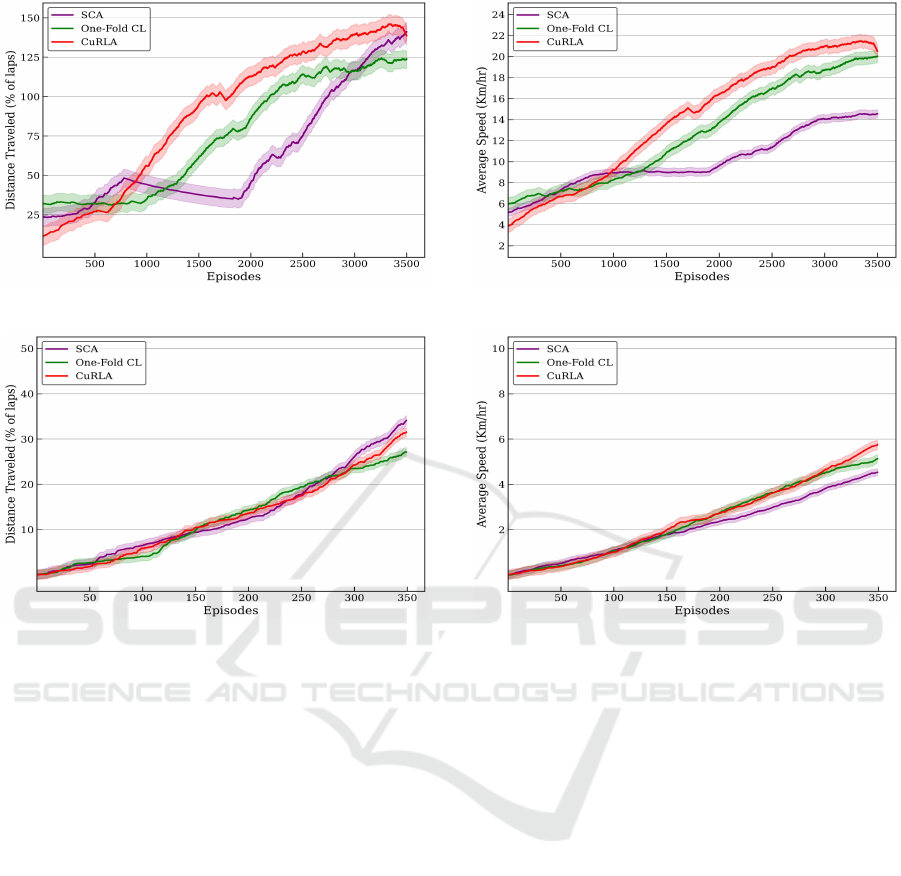
Figure 6: Training Metric: Distance Traveled.
Figure 7: Evaluation Metric: Distance Traveled.
not as much during evaluation (Fig.9), but CurLA and
One-Fold CL still outperform SCA here as well, with
CuRLA reaching an average speed of 6 Km/hr and
One-Fold CL reaching an average speed of 5 Km/hr,
compared to SCA’s 4 Km/hr. This superior perfor-
mance of CuRLA and One-Fold CL (on the revised
reward function) compared to the SCA agent (using
the original reward function) underscores our reward
function’s efficiency in optimizing speed-related as-
pects.
4 CONCLUSIONS
In this paper, we presented a model (CuRLA) that
used a PPO+VAE architecture and two-fold curricu-
lum learning along with a reward function tuned to
accelerate the training process and achieve higher av-
erage speeds in autonomous driving scenarios. We
show the performance of two-fold curriculum learn-
ing against simple curriculum learning (One-Fold CL
agent), as well as the performance of agents on the
revised reward function compared to the base reward
function. While CuRLA and One-Fold CL perform
comparably to the base agent (SCA) in the distance
Figure 8: Training Metric: Average Speed.
Figure 9: Evaluation Metric: Average Speed.
traveled metric (with CuRLA performing slightly bet-
ter and One-Fold CL being slightly worse), a sig-
nificant improvement in average speed is observed.
This prioritization of speed was a deliberate design
choice. The distance traveled metric solely opti-
mizes for maximizing the traversed path length. Con-
versely, the average speed metric inherently optimizes
for both distance and the time taken to complete the
journey, effectively accounting for two performance
factors within a single measure. The performance of
CuRLA and One-Fold CL agents, when compared to
SCA, also attest to the benefits of using curriculum
learning while training, and how decomposing the
tasks in the autonomous driving problem helps agents
to learn better and faster. Integrating multiple objec-
tives into a single scalar reward function often leads
to suboptimal agent performance. However, by em-
ploying curriculum learning during training, we can
enable agents to master the nuances of each reward
component more effectively. This approach facilitates
better understanding of the environment and objec-
tives, and ultimately enhances overall performance.
Future research will focus on enhancing perfor-
mance by updating the architecture and algorithms.
One area of interest is investigating vision-based
CuRLA: Curriculum Learning Based Deep Reinforcement Learning for Autonomous Driving
441

transformers and advanced transformer-based rein-
forcement learning methods for autonomous driv-
ing control. This entails replacing the current Vari-
ational Autoencoder with architectures like Vision
Transformers (ViT, Swin Transformer, ConvNeXT)
tailored for raw visual data. Furthermore, newer
techniques such as Decision Transformers or Trajec-
tory Transformers could replace the Proximal Policy
Optimization (PPO) algorithm to potentially enhance
decision-making capabilities. Another promising area
for future research is Multi-Objective Reinforcement
Learning (MORL) (Van Moffaert and Now
´
e, 2014;
Hayes et al., 2021; Liu et al., 2015), where an agent
optimizes multiple reward functions, each represent-
ing different objectives. Evaluating these advance-
ments through simulated testing may lead to substan-
tial performance improvements.
REFERENCES
Baldi, P. (2011). Autoencoders, unsupervised learning, and
deep architectures. In ICML Unsupervised and Trans-
fer Learning.
Bengio, Y., Louradour, J., Collobert, R., and Weston, J.
(2009). Curriculum learning. volume 60, page 6.
Dickmanns, E. D. and Zapp, B. (1987). An integrated dy-
namic scene analysis system for autonomous road ve-
hicles. In Intelligent Vehicles ’87, pages 157–164.
IEEE.
Dosovitskiy, A., Ros, G., Codevilla, F., Lopez, A., and
Koltun, V. (2017). Carla: An open urban driving sim-
ulator.
Grigorescu, S., Trasnea, B., Cocias, T., and Macesanu,
G. (2019). A survey of deep learning techniques
for autonomous driving. Journal of Field Robotics,
37(3):362–386.
Hayes, C. F., Radulescu, R., Bargiacchi, E., K
¨
allstr
¨
om,
J., Macfarlane, M., Reymond, M., Verstraeten, T.,
Zintgraf, L. M., Dazeley, R., Heintz, F., Howley,
E., Irissappane, A. A., Mannion, P., Now
´
e, A.,
de Oliveira Ramos, G., Restelli, M., Vamplew, P., and
Roijers, D. M. (2021). A practical guide to multi-
objective reinforcement learning and planning. CoRR,
abs/2103.09568.
Kendall, A., Hawke, J., Janz, D., Mazur, P., Reda, D., Allen,
J.-M., Lam, V.-D., Bewley, A., and Shah, A. (2018).
Learning to drive in a day.
Kingma, D. P. and Welling, M. (2022). Auto-encoding vari-
ational bayes.
Krizhevsky, A., Sutskever, I., and Hinton, G. (2012). Im-
agenet classification with deep convolutional neural
networks. Neural Information Processing Systems,
25.
Kullback, S. and Leibler, R. A. (1951). On information
and sufficiency. The Annals of Mathematical Statis-
tics, 22(1):79–86.
Li, Y. and Ibanez-Guzman, J. (2020). Lidar for autonomous
driving: The principles, challenges, and trends for au-
tomotive lidar and perception systems. IEEE Signal
Processing Magazine, 37(4):50–61.
Lillicrap, T. P., Hunt, J. J., Pritzel, A., Heess, N., Erez, T.,
Tassa, Y., Silver, D., and Wierstra, D. (2019). Contin-
uous control with deep reinforcement learning.
Liu, C., Xu, X., and Hu, D. (2015). Multiobjective rein-
forcement learning: A comprehensive overview. IEEE
Transactions on Systems, Man, and Cybernetics: Sys-
tems, 45(3):385–398.
Mnih, V., Badia, A. P., Mirza, M., Graves, A., Lillicrap,
T. P., Harley, T., Silver, D., and Kavukcuoglu, K.
(2016). Asynchronous methods for deep reinforce-
ment learning.
Mnih, V., Kavukcuoglu, K., Silver, D., Graves, A.,
Antonoglou, I., Wierstra, D., and Riedmiller, M.
(2013). Playing atari with deep reinforcement learn-
ing.
Moravec, H. (1990). Sensor fusion in autonomous vehicles.
In Sensor Fusion, pages 125–153. Springer, Boston,
MA.
Narvekar, S., Peng, B., Leonetti, M., Sinapov, J., Taylor,
M. E., and Stone, P. (2020). Curriculum learning for
reinforcement learning domains: A framework and
survey.
Pomerleau, D. A. (1988). Alvinn: An autonomous land
vehicle in a neural network. In Touretzky, D., editor,
Advances in Neural Information Processing Systems,
volume 1. Morgan-Kaufmann.
Rumelhart, D. E., Hinton, G. E., and Williams, R. J. (1986).
Learning internal representations by error propaga-
tion.
Schulman, J., Levine, S., Moritz, P., Jordan, M. I., and
Abbeel, P. (2017a). Trust region policy optimization.
Schulman, J., Wolski, F., Dhariwal, P., Radford, A., and
Klimov, O. (2017b). Proximal policy optimization al-
gorithms.
Sutton, R. S., McAllester, D., Singh, S., and Mansour, Y.
(1999). Policy gradient methods for reinforcement
learning with function approximation. In Solla, S.,
Leen, T., and M
¨
uller, K., editors, Advances in Neu-
ral Information Processing Systems, volume 12. MIT
Press.
Thrun, S., Burgard, W., and Fox, D. (2005). Probabilis-
tic Robotics (Intelligent Robotics and Autonomous
Agents).
Van Moffaert, K. and Now
´
e, A. (2014). Multi-objective re-
inforcement learning using sets of pareto dominating
policies. The Journal of Machine Learning Research,
15(1):3483–3512.
Vergara, M. L. (2019). Accelerating training of deep rein-
forcement learning-based autonomous driving agents
through comparative study of agent and environment
designs. Master thesis, NTNU.
Wikipedia contributors (2024). Darpa grand challenge
(2005) — Wikipedia, the free encyclopedia.
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
442
