
HPE-DARTS: Hybrid Pruning and Proxy Evaluation in Differentiable
Architecture Search
Hung-I Lin
1
, Lin-Jing Kuo
2
and Sheng-De Wang
1
1
Department of Electrical Engineering, National Taiwan University, Taipei, Taiwan
2
Graduate Institute of Electronics Engineering, National Taiwan University, Taipei, Taiwan
Keywords:
Deep Learning, Neural Architecture Search, Differential Neural Architecture Search, Hybrid Pruning, Proxy
Evaluation.
Abstract:
Neural architecture search (NAS) has emerged as a powerful methodology for automating deep neural net-
work design, yet its high computational cost limits practical applications. We introduce Hybrid Pruning and
Proxy Evaluation in Differentiable Architecture Search (HPE-DARTS), integrating soft and hard pruning with
a proxy evaluation strategy to enhance efficiency. A warm-up phase stabilizes network parameters, soft prun-
ing via NetPerfProxy accelerates iteration, and hard pruning eliminates less valuable operations to refine the
search space. Experiments demonstrate HPE-DARTS reduces search time and achieves competitive accuracy,
addressing the reliance on costly validation. This scalable approach offers a practical solution for resource-
constrained NAS applications.
1 INTRODUCTION
Neural Architecture Search (NAS) automates neural
network design, addressing the inefficiencies of man-
ual approaches by systematically exploring a range of
architectures tailored to specific tasks (Elsken et al.,
2019; Ren et al., 2021). Early NAS methods, such
as those by (Zoph and Le, 2017; Zoph et al., 2018;
Real et al., 2019), incurred high computational costs
due to repeated training for performance evaluation.
To mitigate this, Differentiable ARchiTecture Search
(DARTS) (Liu et al., 2019) introduced gradient-based
optimization, significantly reducing costs while de-
livering competitive results through continuous relax-
ation of architecture representation for simultaneous
weight and parameter optimization. Moreover, its
gradient-based approach established a foundation for
more efficient NAS methodologies.
Despite its advancements, DARTS faces some is-
sues and inefficiencies. P-DARTS (Chen et al., 2019)
points out an optimization gap that leads to accuracy
drops when searching with a super-net and evaluating
with a sub-network. The P-DARTS approach narrows
the gap by progressively increasing the network depth
while reducing the search space during the search
stage. VP-DARTS (Feng and Wang, 2024) addresses
the performance collapse caused by excessive skip
connections in the final architecture by transforming
the architecture search as a model pruning problem,
and applying a soft pruning technique with decaying
the architecture parameters of unimportant operations
to prevent the direct removal of high potential opera-
tions.
However, both VP-DARTS and P-DARTS face
notable limitations. VP-DARTS relies heavily on
the validation dataset to assess operation importance,
leading to increased search time and low efficiency.
While P-DARTS enhances efficiency by progres-
sively narrowing the search space, it discards all su-
pernet parameters and weights each time the network
depth increases, hindering overall performance. Ad-
ditionally, its strategy for pruning less important op-
erations based on architecture parameters has proven
to be inaccurate in (Feng and Wang, 2024), further
impacting search results.
To address these challenges, we propose Hy-
brid Pruning and Proxy Evaluation in Differentiable
Architecture Search (HPE-DARTS). Combining soft
and hard pruning, HPE-DARTS refines architecture
parameters while removing unimportant operations.
Additionally, we adapt Neural Architecture Search
WithOut Training (NASWOT) (Mellor et al., 2021)
into NetPerfProxy, enhancing efficiency and accuracy
in evaluating operations within DARTS-like search
spaces.
252
Lin, H.-I., Kuo, L.-J. and Wang, S.-D.
HPE-DARTS: Hybrid Pruning and Proxy Evaluation in Differentiable Architecture Search.
DOI: 10.5220/0013148700003890
In Proceedings of the 17th International Conference on Agents and Artificial Intelligence (ICAART 2025) - Volume 2, pages 252-263
ISBN: 978-989-758-737-5; ISSN: 2184-433X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

The contributions of our work can be comprehen-
sively detailed and summarized as follows:
• Enhanced Efficiency. We introduce a novel hy-
brid pruning strategy that enhances the perfor-
mance and the efficiency with respective to VP-
DARTS, Furthermore, we achieve comparable re-
sults to P-DARTS while reducing the search time
cost.
• Improved Evaluation Method. We developed
NetPerfProxy, which is an adaptation and modi-
fication of NASWOT, to use within DARTS-like
search spaces. The results show that using Net-
PerfProxy to evaluate operations could achieve
superior results compared with using NASWOT,
making it more suitable for applying on DARTS-
like search space.
• Generalization Ability. HPE-DARTS is useful
when applying to DARTS search space, which re-
quires a comprehensive exploration of operations
and connections between nodes. Experimental re-
sults show that HPE-DARTS maintains its effec-
tiveness across different search spaces, demon-
strating generalization capabilities and providing
competitive performance against state-of-the-art
methods.
The paper is organized as follows: Section 2 pro-
vides a literature review, highlighting the state-of-the-
art approaches and their limitations. Section 3 details
the proposed methodology, including the hybrid prun-
ing strategy and the design of NetPerfProxy. Section
4 presents experimental results and comparative anal-
yses. Finally, Section 5 discusses conclusions and fu-
ture research directions.
2 RELATED WORK
2.1 Neural Architecture Search
Traditional hand-crafted architectures like VGG (Si-
monyan and Zisserman, 2015) and ResNet (He et al.,
2016), have demonstrated significant success across
various domains, including image classification, ob-
ject detection, semantic segmentation, etc. These ar-
chitectures are known for their deep layers and the
ability to capture complex features. However, de-
signing these networks often requires extensive do-
main knowledge and a substantial amount of trial-
and-error, which can be time-consuming and ineffi-
cient (Elsken et al., 2019; Ren et al., 2021; White
et al., 2023). Thus, Neural Architecture Search (NAS)
has gained lots of attention because it evolved from
manual designs to automated systems, reducing re-
liance on human expertise and time costs. NAS
methodologies are commonly categorized based on
the search space, search strategy, and performance es-
timation strategy they employ (Kyriakides and Mar-
garitis, 2020). Some earlier studies utilized reinforce-
ment learning (RL) (Zoph and Le, 2017; Baker et al.,
2017) as a search strategy to automatically generate
neural architectures for image classification tasks. In
contrast to developing a neural architecture gradu-
ally by using RL, other research employed the evo-
lutionary algorithm (EA) (Xie and Yuille, 2017; Real
et al., 2017) to identify optimal neural architectures
from a set of potential neural architectures. However,
with the increase of the NAS algorithm complexity, to
achieve better results, the algorithms even need hun-
dreds of GPU days to search for a good architecture.
It is obviously a dilemma to utilize these NAS meth-
ods in practical applications.
2.2 DARTS
In order to accomplish the architecture search within
a short period of time, one-shot techniques were
introduced to avoid training each architecture from
scratch, thus circumventing the associated computa-
tional burden. Instead of training each architecture
from scratch individually to evaluate performance,
one-shot approaches optimize all networks within the
search space by training a single, over-parameterized
”supernet.” This supernet encompasses all possible
architectures as sub-networks, allowing for simulta-
neous training and evaluation (Pham et al., 2018; Ben-
der et al., 2018; Saxena and Verbeek, 2016; Xie et al.,
2021). Once a supernet is trained, each architecture
in the search space could be derived from the super-
net by inheriting the weights to evaluate. While the
supernet allows quick evaluations of all architectures,
it still needs a search strategy to search for a good ar-
chitecture.
Differentiable Architecture Search (DARTS) (Liu
et al., 2019) employs a continuous relaxation of the
discrete search space, enabling the application of gra-
dient descent to find a good architecture. In DARTS,
as depicted in Figure 1, each edge simultaneously
contains all candidate operations, weighted by ar-
chitecture parameters (α). The architecture param-
eters are optimized concurrently with the supernet’s
weights through gradient descent to determine the
contribution of each operation. After the search, the
final model is derived by choosing the operation with
the highest architecture parameter on each edge and
then retrained from scratch to evaluate its final perfor-
mance. DARTS gained significant attention due to its
HPE-DARTS: Hybrid Pruning and Proxy Evaluation in Differentiable Architecture Search
253
simplicity and efficiency, reducing the computational
cost and search time of traditional NAS methods to
only a couple of GPU days.
(b) (c) (d)(a)
Normal
Cell
Reduction
Cell
Input
Output
N×
Normal
Cell
Reduction
Cell
N×
Normal
Cell
N×
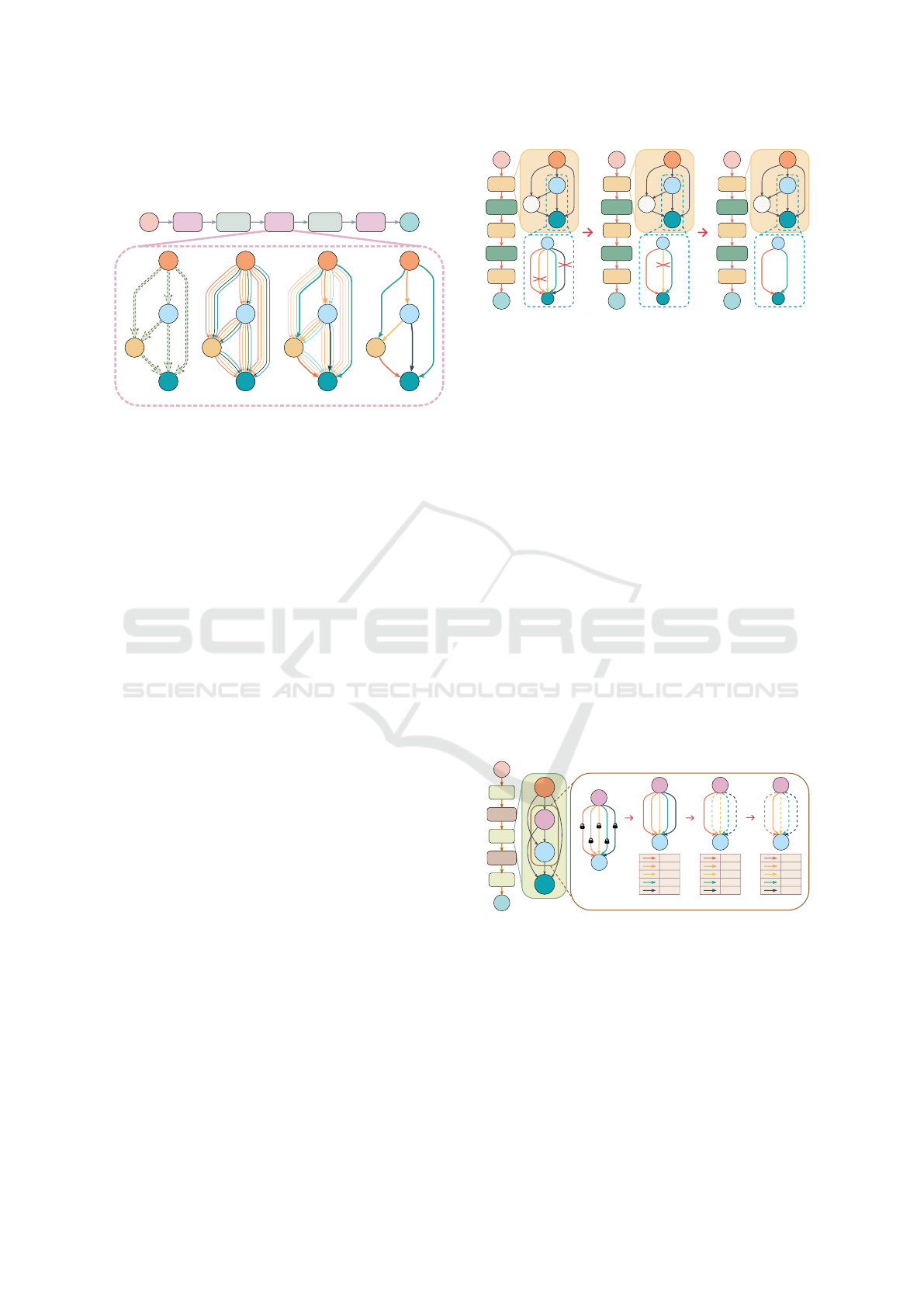
Figure 1: Stages of architecture search in DARTS (Liu
et al., 2019): (a) Initial state with unknown operations on
the edges (b) Applying continuous relaxation of the search
by mixing candidate operations with learnable parameters
on each edge. (c) Joint optimization of the mixing learnable
parameters and the network weights by gradient descent.
(d) The final architecture is derived by selecting the most
influential operations based on the learned parameters.
Despite the advantages of using DARTS, several
works (Zela et al., 2020; Wang et al., 2021; Liang
et al., 2019) show that differentiable NAS tends to
favor the parameter-free operations like skip connec-
tions and leads to under-performance, which may be
caused by the supernet using skip connections to over-
compensate the vanishing gradients problem (Chu
et al., 2021). Beta-DARTS (Ye et al., 2022) proposed
Beta-Decay regularization to constrain the values of
network parameters after softmax from changing too
much. Fair-DARTS (Chu et al., 2020) remove the
softmax function on architecture parameters to set all
operations independent of all others, and then apply
an additional loss function which pushes the architec-
ture parameters toward 0 or 1.
Moreover, constructing a supernet reduces the
need to train lots of candidate architectures, while suf-
focating with the high memory consumption to train
a supernet. PC-DARTS (Xu et al., 2020) randomly
sample a proportion of channels to perform operation
searches while bypassing the rest of the channels in a
shortcut. DrNAS (Chen et al., 2021a) adopts a pro-
gressive approach by gradually increasing the frac-
tion of channels forwarded while concurrently reduc-
ing the operation space by pruning less critical op-
erations, and models the architecture parameter as
Dirichlet distribution.
However, there is an optimization gap that leads to
an accuracy drop when searching with a super-net and
evaluating with a sub-network because of the incon-
sistency of the settings between searching and evalu-
ating. P-DARTS (Chen et al., 2019) alleviates the gap
Normal
Cell
Reduction
Cell
Normal
Cell
Reduction
Cell
Normal
Cell
Input
Output
1×
1×
1×
Normal
Cell
Reduction
Cell
Normal
Cell
Reduction
Cell
Normal
Cell
Input
Output
3×
3×
3×
Normal
Cell
Reduction
Cell
Normal
Cell
Reduction
Cell
Normal
Cell
Input
Output
5×
5×
5×
(a) Initial Stage (b) Intermediate Stage (c) Final Stage
Normal Cell Normal Cell Normal Cell
0.28
0.2
0.32
0.08
0.12
0.18
0.55
0.27
0.87
0.13
Figure 2: The overall pipeline of P-DARTS (Chen et al.,
2019). (a) The initial stage presents the shallowest version
of the network, incorporating all candidate operations on its
edges. (b) By the intermediate stage, the network deepens
and eliminates less critical operations. (c) The final stage
displays a further deepened and optimized network archi-
tecture.
by progressively increasing the network depth while
simultaneously reducing the search space during the
search stage as illustrated in Figure 2. SGAS (Li
et al., 2020) gradually replaces the mixture on each
edge with the most critical operation based on the
greedy Selection Criterion, which is formed by the
entropy of the weights of non-zero operations and the
changes of the weights within a history window, to
divide the search procedure into sub-problems. VP-
DARTS (Feng and Wang, 2024) formulates the archi-
tecture search as a model pruning problem as shown
in Figure 3 and applies a soft pruning technique by
decaying the architecture parameters α of unimpor-
tant operations, which is evaluated by temporally re-
moving it on each edge and calculating the accuracy
drop of the supernet, i.e., larger accuracy drop means
the more important of the operation.
0.2
0.2
0.2
0.2
0.2
0.61
0.65
0.78
0.81
0.71
0.80
0.34
0.63
0.78
0.56
0.12
0.16
0.24
0.02
0.08
0.85
0.41
0.56
0.68
0.38
0.09
0.02
0.16
0.43
0.06
(b) Prune Epoch 0 (c) Prune Epoch 1 (d) Prune Epoch 2
Normal
Cell
Reduction
Cell
Normal
Cell
Reduction
Cell
Normal
Cell
Input
Output
N×
N×
N×
0.2
0.2
0.2
0.2
0.2
(a) Warm-Up
Fix Alphas
Train Network
Figure 3: The overall pipeline of VP-DARTS (Feng and
Wang, 2024). VP-DARTS employs a soft pruning technique
that involves decaying the architecture parameters of oper-
ations that are less important. In each pruning epoch, op-
erations are temporarily removed to assess their impact on
the overall accuracy of the supernet. The process includes
a warm-up stage, where architecture parameters are fixed
and the network is trained, followed by subsequent prun-
ing epochs with a soft pruning technique to prevent pruning
high potential operations.
Our method builds on the foundational strategies
of the soft pruning from VP-DARTS and P-DARTS’s
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
254

strategy of progressively shrinking the search space.
By integrating soft pruning, our approach uses net-
work performance to selectively prune operations,
ensuring the most effective operations are retained,
and others could regain their importance later in the
search process. Simultaneously, we implement pro-
gressive search space reduction from P-DARTS as a
hard pruning method, enhancing the efficiency of the
search process. This hybrid approach aims to address
the challenges of overfitting and computational in-
efficiency in NAS, yielding robust, high-performing
models.
2.3 Approach of Evaluation
DARTS (Liu et al., 2019) employs a continuous re-
laxation of the discrete search space, constructing
a supernet where each edge contains all candidate
operations associated with learnable architecture pa-
rameters. Due to the continuous relaxation, DARTS
makes the architecture parameters differentiable and
could utilize gradient-based optimization to search for
a good architecture. However, when selecting the
most crucial operation on each edge, DARTS selects
the operation with the highest architecture parameter
which can be misleading. This is because the archi-
tecture parameters are optimized as ratios to combine
the operations rather than indicating the most plausi-
ble operation.
Besides, the recent success of deep convolutional
neural network (Simonyan and Zisserman, 2015; He
et al., 2016) has been linked with the increasing
requirement of computation resources due to over-
parameterization. To address this issue, network
pruning has gained a lot of attention due to its compet-
itive performance and compatibility, as it removes the
redundant parameters that do not significantly con-
tribute to accuracy. However, identifying the redun-
dant parameters to prune becomes a critical issue. An
early method to prune networks is brute-force prun-
ing, traversing the entire network element-wise and
removing weights that do not affect accuracy. How-
ever, the brute force could be more efficient and prac-
tical; later works change to adopt l
1
-norm and l
2
-norm
to calculate the importance of the weights or layers
and prune those closer to zero. VP-DARTS (Feng and
Wang, 2024) observes that the over-parameterized
”supernet” in DARTS also needs to be ”pruned” to
find the final architecture with minimal accuracy drop.
Therefore, VP-DARTS formulate the differentiable
NAS as a model pruning problem, evaluating the im-
portance of operations by their impact on the super-
net’s validation accuracy when selectively temporally
pruned. This pruning-based evaluation method im-
proves the decision-making process in DARTS while
significantly increasing the time and computational
resources required due to numerous evaluations dur-
ing the search process.
Recently, training-free approaches (Mellor et al.,
2021; Wu et al., 2024; Wu et al., 2022) have emerged
as cost-effective alternatives in Neural Architecture
Search (NAS) by eliminating the need for a training
process to evaluate architectural performance. NAS
without training (NASWOT) (Mellor et al., 2021) in-
troduces a scoring function that predicts architecture
efficacy based on the overlap of activations among in-
puts without requiring any training procedure. The
fundamental premise of NASWOT is that a greater
disparity for different inputs at each convolutional
layer indicates a higher potential for the network to
learn to distinguish between those inputs effectively.
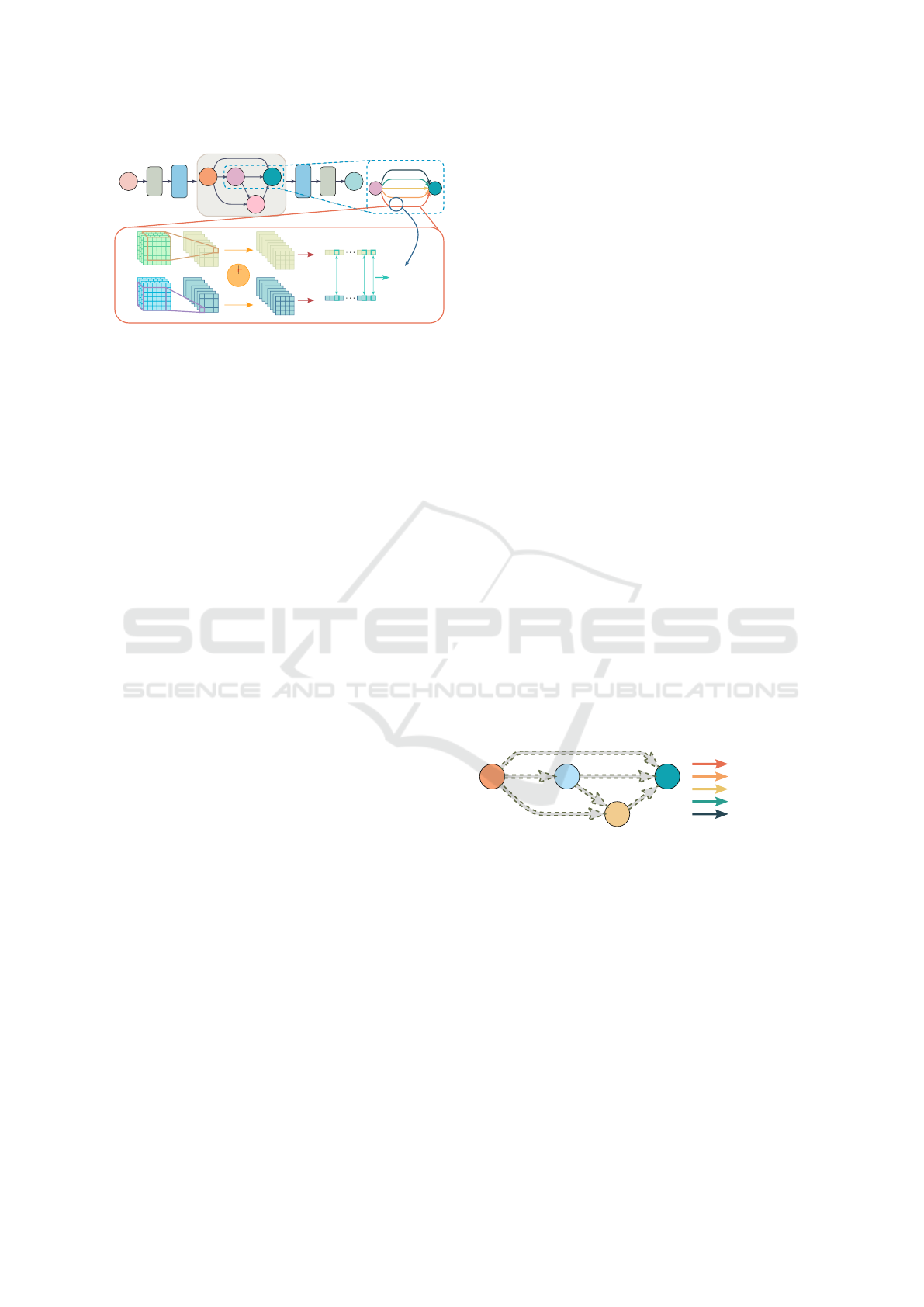
For instance, as shown in Figure 4, data points i and j
pass through a convolution layer in a network, and S
i j
is referred to the number of same bits between binary
codes S
i
and S
j
. Then, the score is defined as :
K
C
=
L S
C
12
. . . S
C
1N
S
C
21
L . . . S
C
2N
.
.
.
.
.
.
.
.
.
.
.
.
S
C
N1
S
C
N2
. . . L
, (1)
NASWOT(Net) = log det(
∑
layer C∈Net
K
C
). (2)
That is, the logarithm determinant of the summa-
tion of the matrix formed by S
i j
from each convolu-
tion layer C, and the L in the matrix is defined as the
length of the binary codes. This innovative approach
predicts scores with a high correlation with trained
network performance and drastically reduces the time
cost in NAS by replacing the training process. How-
ever, NASWOT was not initially designed to handle
DARTS-like architectures where multiple operations
compete on a single edge, each modulated by their
respective architecture parameters α.
Conv3x3
Conv5x5
AvgPool2x2
MaxPool2x2
Fully
Connected
input
output
Binary
ReLU
0
1
1
0
1 1
11 1
1
1 1
0
0 0
0
00
0
1
0
1
1
1
0
0
0
0
0
0
1
1
1
1
1 1 1
0
1 1
00
data
point j
data
point i
0 0
11
0
11
0
S
ij
= counting number
of same bits
between S
i
ad S
j
S
i
S
j
if x > 0, then x = 1
else, then x = 0
Flatten
Flatten
same bit
Convolution
0.9
-1.2
1.5 3.1 -2.5
1.8 2.2 0.3
-1.8 -0.7 -2.3
-0.7 -1.50.43.4
0.3
-0.3 0.5
0.1 0.9
0.8
-0.7
-0.6
-0.4
-1.2
-3.5
-4.3
-2.6
4.0
2.3 1.5
1.2
Figure 4: A simple example to illustrate the concept of
NASWOT score.
HPE-DARTS: Hybrid Pruning and Proxy Evaluation in Differentiable Architecture Search
255

3 APPROACHES
Our method enhances the Differentiable ARchiTec-
ture Search (DARTS) framework (Liu et al., 2019)
by introducing a novel hybrid pruning strategy that
synergizes the strengths of soft and hard pruning to
enhance both the efficiency and effectiveness of the
architecture search process. We also integrate a mod-
ified version of NASWOT (Mellor et al., 2021) as
NetPerfProxy, adapted for DARTS-like search spaces
with multiple operations per edge. This adaptation
enables rapid and effective performance predictions
during the architecture search, streamlining the eval-
uation process.
3.1 Preliminaries
In DARTS, the search space is defined by a repeated
cell structure. Each cell is modeled as a directed
acyclic graph (DAG) with N nodes, where each node
represents an intermediate feature map and each di-
rected edge (i, j) between nodes i and j carries an op-
eration o
(i, j)
that transforms the feature map x
(i)
. By
parameterizing the operations on the edges, each edge
(i, j) in the directed acyclic graph becomes a mixed
operation ¯o
(i, j)
that is a weighted combination of all
candidate operations o ∈ O, and is thus formulated as:
¯o
(i, j)
(x
(i)
) =
∑
o∈O
exp(α
(i, j)
o
)
∑
o
′
∈O
exp(α
(i, j)
o
′
)
o(x
(i)
), (3)
where the weights are derived from the learnable ar-
chitecture parameters α
(i, j)
o
using the softmax func-
tion, which normalizes these parameters across all op-
erations and mixes the outputs of different operations
on an edge.
With continuous relaxation, DARTS allows for the
simultaneous optimization of the learnable architec-
ture parameters α and the network parameters ω via
gradient descent, and this bi-level optimization prob-
lem can be expressed as:
min
α
L
val
(ω
∗
(α), α)
s.t. ω
∗
(α) = argmin
ω
L
train
(ω, α).
(4)
Upon completion of the search phase in DARTS,
the final architecture is derived by discretizing the
continuously relaxed architecture representation; that
is, DARTS selects the operation with the highest
weight on each edge, effectively converting the prob-
abilistic mixture of operations into a discrete choice.
3.2 Hybrid Pruning Mechanism
Our methodology refines the DARTS framework by
implementing a hybrid pruning strategy that enhances
the efficiency and efficacy of the architecture search
by incorporating both soft and hard pruning tech-
niques at different phases of the search. As illustrated
in Algorithm 1, the process begins with a warm-up
stage with E
warmup
epochs and progresses through S
hybrid pruning stages, each involving soft and hard
pruning techniques denoted by SoftP and HardP. For
the hard pruning parts within these hybrid pruning
stages, it is essential to pre-define a vector of con-
stants:
Pop = [Pop
1
, Pop
2
, ··· , Pop
S
], (5)
as hyper-parameters, where each Pop
i
specifies the
number of operations to be hard pruned in the i-th hy-
brid pruning stage. Additionally, it is crucial that the
cumulative effect of the Pop values across all stages
results in only one operation left on each edge after
the search. Specifically, the sum of all Pop
i
values,
from the first to the S-th stage, must equate to |O| −1,
where |O| represents the total number of candidate
operations. This ensures that exactly one operation
is left on each edge after the search process:
S
∑
i=1
Pop
i
= |O| −1 (6)
where O is the set of candidate operations in the
search space. At each hybrid pruning stage, soft prun-
ing decays the less important operations while allow-
ing them to recover in the later epochs, which is de-
scribed in Section 3.2.2. After soft pruning, hard
pruning is applied to remove the Pop
i
less important
operations to reduce the search space for searching
more efficiently on important operations as explained
in Section 3.2.3. This iterative refinement continues
until each edge of the network retains only its most
vital operation, resulting in an optimized final archi-
tecture.
Moreover, to address the inefficiency of the ar-
chitecture evaluation method proposed by (Feng and
Wang, 2024), we adopt NAS Without Training (NAS-
WOT) (Mellor et al., 2021), a quick performance
estimation technique by assessing the connectivity
and potential of the architecture without any training,
and modify it as NetPerfProxy to predict better on
DARTS-like search space, which will be introduced
in Section 3.3.
3.2.1 Warm-up Stage
The warm-up stage serves as the foundation of our
pruning strategy, inspired by techniques used in VP-
DARTS (Feng and Wang, 2024). During this initial
stage, the architecture parameters α are fixed to sta-
bilize the training dynamics of the network. This al-
lows the network weights to learn without the influ-
ence of changing architecture parameters. The fixed
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
256

Algorithm 1: Hybrid Pruning Search Strategy.
Require: Number of hybrid pruning stages S
Require: Number of warmup epochs E
warmup
; Num-
ber of pruning epochs E
prune
Require: Training dataset D
train
; Validation dataset
D
val
Require: Numbers of pruning operations at each hy-
brid stage Pop = [Pop
1
, Pop
2
, ···, Pop
S
]
Ensure: Final derived architecture: Arch
1: Create a supernet SNet with weights ω and archi-
tecture parameters α
// Warm-up Stage:
2: for e = 1 to E
warmup
do;
3: Train network weights ω on D
train
with fixed
architecture parameters α
4: end for
// Hybrid Pruning Stages:
5: for st = 1 to S do;
6: SNet=SoftP(SNet, E
warmup
, D
train
, D
val
)
7: SNet=HardP(SNet, Pop[st], D
val
)
8: end for
9: Derive the final architecture Arch based on
Pruned supernet SNet
architecture parameters during this phase ensure that
the model’s focus is on learning robust feature repre-
sentations before any pruning begins, setting a strong
baseline for subsequent optimization steps.
3.2.2 Hybrid Pruning Stage: Soft Pruning Part
Following the warm-up, we transition to the hybrid
pruning stages. In the first half part of each hybrid
pruning stage, soft pruning will be applied for E
prune
.
At each epoch, influenced by the soft pruning ap-
proach in VP-DARTS (Feng and Wang, 2024), the
operations on each edge of the cell are evaluated indi-
vidually for their impact on the network performance.
The importance of each operation is evaluated by ex-
amining the performance drop after temporarily re-
moving the operation from the network. If network
performance decreases significantly, the removed op-
eration is quite important. After evaluating each op-
eration on all edges, the architecture parameters α
of these unimportant operations will be gradually de-
cayed by the soft pruning decay strategy in (Feng and
Wang, 2024) as shown in Equation 7:
α
o,i
= α
o,i−1
∗ (1 −
i
E
prune
), 0 ≤ i < E
prune
, (7)
where i represents the current epoch, E
prune
is the
total number of pruning epochs, and o is the opera-
tion on each edge. This reduction is not immediate
elimination but a down-weighting process, allowing
these operations to have a decreasing influence over
the model’s output while still having the chance to
recover in later epochs if these operations have high
potential. This pruning method is less aggressive and
permits the network to adapt smoothly to changes in
its architecture, preserving critical operations while
de-emphasizing the less important ones. After updat-
ing the architecture parameters, the supernet will be
trained to refine the weights to cooperate with the up-
dated architecture parameters.
3.2.3 Hybrid Pruning Stage: Hard Pruning Part
After soft pruning has effectively identified and
down-weighted the less important operations, we im-
plement hard pruning to eliminate them decisively.
This hard pruning part is inspired by the strategies
used in P-DARTS (Chen et al., 2019; Chen et al.,
2021b). Similar to soft pruning, the operations on
each edge of the cell are evaluated individually. Af-
ter sorting operation importance, the least important
Pop operations on each edge are completely removed
from the architecture. This action significantly re-
duces the computational complexity and narrows the
search space, enabling a more focused and efficient
optimization of the remaining operations. Hard prun-
ing acts as a conclusive refinement step, ensuring that
only the most critical operations are carried forward
to derive the final architecture.
3.3 Network Performance Proxy
To address the inefficiency of the traditional architec-
ture evaluation method, we adopt NAS Without Train-
ing (NASWOT) (Mellor et al., 2021), a quick perfor-
mance estimation technique by assessing the connec-
tivity and potential of the architecture that does not re-
quire training, to use as the evaluation method. More
specifically, when using the evaluation method of ex-
amining the performance drop after temporarily re-
moving the operation from the network, we use NAS-
WOT to test the network performance instead of us-
ing the validation dataset. Although only substitut-
ing the validating process, not training, it still could
reduce the time cost, especially since the evaluation
method is frequently used in soft pruning. However,
the original NASWOT framework was primarily de-
signed for simpler architectures where each edge in
the network’s graph represented a single operation.
This model did not account for the complexities of a
DARTS-like search space, where multiple candidate
operations can exist on a single edge, each weighted
by learnable parameters α.
Thus, we developed NetPerfProxy, a modified ver-
sion of NASWOT, to effectively operate within such
HPE-DARTS: Hybrid Pruning and Proxy Evaluation in Differentiable Architecture Search
257
Normal
Cell
Reduction
Cell
Reduction
Cell
Normal
Cell
Input
Output
Normal Cell
N×
N×
𝛼3
𝛼2
𝛼5
𝛼4
𝛼1
Binary
ReLU
0
1
1
0
1 1
11 1
1
1 1
0
0 0
0
00
0
1
0
1
1
1
0
0
0
0
0
0
1
1
1
1
1 1 1
0
1 1
00
data
point j
data
point i
0 0
11
0
11
0
𝛼5×
(counting number
of same bits
between S
i
ad S
j
)
S
i
S
j
if x > 0, then x = 1
else, then x = 0
Flatten
Flatten
same bit
Convolution
N×
S
ij
=
0.9
-1.2
1.5 3.1 -2.5
1.8 2.2 0.3
-1.8 -0.7 -2.3
-0.7 -1.50.43.4
0.3
-0.3 0.5
0.1 0.9
0.8
-0.7
-0.6
-0.4
-1.2
-3.5
-4.3
-2.6
4.0
2.3 1.5
1.2
Figure 5: A demonstration of the concept of NetPerfProxy.
a search space. In order to integrate this dynamic
into NASWOT’s architecture evaluation, we modified
the way NASWOT calculates the Hamming distance,
which serves as a measure of similarity between data
points in a mini-batch based on their activation pat-
terns. Specifically, as illustrated in Figure 5, data
points i and j pass through the operation with archi-
tecture parameter α
5
on the edge and form the binary
code S
i
and S
j
that represents the data points being
activated or not. When computing the Hamming dis-
tance between activation patterns S
i
and S
j
, the Net-
PerfProxy multiplies the Hamming distance |S
i
− S
j
|
by the architecture parameter α
5
associated with each
operation on the edges. Thus, the score of each edge
with data points i and j in a batch is defined as:
K
e
i j
=
∑
operation o∈e
|S
o
i
− S
o
j
| ∗ α
o
, (8)
where the score is calculated as the summation of
multiplying the Hamming distance with an architec-
ture parameter α
o
of each operation o within edge e
between pairs of data points. Moreover, the matrix K
e
of size N × N is then formed by K
e
i j
in Equation 8 on
edge e where the N is the size of one mini-batch of
data. The L in the matrix is the length of the binary
codes.
K
e
=
L K
e
12
. . . K
e
1N
K
e
21
L . . . K
e
2N
.
.
.
.
.
.
.
.
.
.
.
.
K
e
N1
K
e
N2
. . . L
. (9)
Thus, the score function of NetPerfProxy can be
defined as follows:
NetPerfProxy(Net) = logdet(
∑
edge e∈Net
K
e
), (10)
where the score is the logarithm determinant of the
element-wise summation of matrices K
e
across all
edges e within the network Net.
This approach ensures that operations deemed
more important (i.e., those with higher architecture
parameters) have a proportionally greater influence on
the network’s overall architecture score. This modifi-
cation allows NetPerfProxy to more accurately pre-
dict the performance of complex, DARTS-like ar-
chitectures where multiple operations compete on
the same edge, thereby enhancing the efficiency and
search results.
4 EXPERIMENTS
4.1 Results on NAS-Bench-201
4.1.1 Search Space
NAS-Bench-201 (Dong and Yang, 2020) enhances
the reproducible Neural Architecture Search (NAS)
landscape by offering a standardized benchmarking
framework, providing fair and consistent comparisons
across different NAS methods. The benchmark em-
ploys a fixed cell-based search space, where each cell
is a directed acyclic graph (DAG) consisting of 4
nodes interconnected by 6 edges as shown in Figure 6.
Each edge allows for an operation selected from a set
of 5 candidates, including Zeroize, Skip Connection,
1x1 Convolution, 3x3 Convolution, and 3x3 Average
Pooling. Consequently, this benchmark comprises a
total of 15,625 unique architectures. We evaluate a
search method across three distinct datasets: CIFAR-
10, CIFAR-100, and ImageNet-16-120. This exten-
sive evaluation allows for comparing the performance
of various NAS methods under consistent experimen-
tal conditions.
Candidate OperationsCell Architecture
Zeroize
Skip Connection
3x3 Convolution
1x1 Convolution
3x3 Avg Pooling
?
?
?
?
?
?
Figure 6: Overview of NAS-Bench-201 search space.
4.1.2 Implementation Details
At the beginning of our architecture search process,
we initiate a warm-up stage consisting of five epochs.
During this warm-up stage, the network parameters
are held constant to ensure stability before any ad-
justments are made to the architecture. Following the
initial warm-up stage, our architecture search process
transitions into the hybrid pruning stages. Each hy-
brid pruning stage is designed to further refine the ar-
chitecture by alternating between training, soft prun-
ing, and hard pruning, allowing for gradual learning
and adjustment to ensure that only the most effective
operations are retained. In the first half of the hy-
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
258

brid pruning stages, the importance of operations dur-
ing soft pruning is determined based on their impact
on accuracy. For the second half of the hybrid prun-
ing stages, we shift our strategy to incorporate our
NetPerfProxy method for evaluating operation impor-
tance. We execute a hard pruning step after the five
epochs of combined soft pruning and training in each
hybrid pruning stage. During this step, the two least
important operations are removed based on their per-
formance impact calculated by NetPerfProxy. That
is to say, each edge in the network’s cell structure
starts with five operations. After the first stage of hard
pruning, this number is reduced to three operations
per edge. Following the second stage, the number is
further reduced, leaving just one operation per edge
at the final stage. We conducted all experiments by
searching on CIFAR-10 (Krizhevsky et al., 2009) and
evaluating the performance across all datasets.
4.1.3 Search Results
The comparison results are shown in Table 1. We only
searched on CIFAR-10 and used the found genotypes
to query the performance of various datasets. To en-
sure robustness and repeatability, the results are av-
eraged over 10 independent search runs. We could
observe that HPE-DARTS demonstrates a remarkable
reduction in search time, completing the process in
just 0.61 hours on the CIFAR-10 dataset. This is con-
siderably faster than other evaluated methods, includ-
ing the more commonly referenced DARTS variants.
For instance, the closest competitor, DrNAS, requires
nearly three times as long at 1.66 hours. When com-
pared to the original DARTS methods, HPE-DARTS
operates in just about 61% and 18.7% of the time
taken by the first-order and second-order versions
of DARTS, respectively. This substantial decrease
in search time does not come at the cost of perfor-
mance; HPE-DARTS achieves competitive accuracies
of 91.52 ± 0.04% on CIFAR-10 and 73.17 ± 0.34%
on CIFAR-100 validation sets, closely mirroring the
’Optimal’ benchmarks of 91.61% and 73.49% respec-
tively. This efficiency provides an effective solution in
situations where computational resources or time are
constrained.
4.2 Results on DARTS
4.2.1 Search Space
In the Differentiable Architecture Search (DARTS)
framework (Liu et al., 2019), the search space is struc-
tured around two types of cells: normal cells and re-
duction cells. In the network architecture, reduction
cells are positioned at one-third and two-thirds of the
total depth. All operations adjacent to the input nodes
are implemented with a stride of two in these reduc-
tion cells,. Each cell is a small directed acyclic graph
(DAG) consisting of an ordered sequence of 4 nodes,
where each node can receive any of the outputs of the
operation applied to the preceding nodes within the
same cell as well as from the outputs of the imme-
diate previous cell and the cell before it as shown in
Figure 7. The operations on the edges are selected
from a set of 8 candidate operations, resulting in a to-
tal of 8
14
possible combinations. However, only two
inputs per node are retained in the final architecture.
This arrangement requires that the NAS algorithms
not only determine the optimal operations to apply at
each edge but also strategically select the connections
between nodes.
Output
k-1
Output
k-2
Output
k
Cell
k
Normal
Cell
Reduction
Cell
Input
Output
N×
Normal
Cell
Reduction
Cell
N×
Normal
Cell
N×
Node
1
Node
2
Node
3
Node
4
Figure 7: Detailed View of the DARTS Search Space and
Cell Architecture. This diagram illustrates the overall net-
work structure of DARTS search space and the internal con-
figuration of a cell structure used in both Normal and Re-
duction Cells within the network. Each edge entering a
node in the cell represents a mixture of eight candidate op-
erations, and only two of the entering edges per node are
retained in the final architecture.
4.2.2 Implementation Details
In adapting our architecture search strategy to the
DARTS search space, we retain several core elements
from our NAS-Bench-201 settings with necessary
adjustments to fit the requirements of DARTS. On
the DART search space, the search process involves
one warm-up stage and three hybrid pruning stages.
Throughout each of these hybrid pruning stages, the
importance of operations during soft pruning is con-
sistently evaluated using our NetPerfProxy approach.
During the hard pruning part of each hybrid pruning
stage, the number of operations that need to be pruned
follows the structured reduction pattern inspired by P-
DARTS. Initially, the network starts with eight opera-
tions on each edge. In the first hybrid pruning stage,
three operations are removed, leaving five operations
per edge. The second hybrid pruning stage is further
reduced, with two more operations pruned to leave
only three operations per edge. In the final hybrid
pruning stage, two additional operations are removed,
and only the single most important operation remains
on each edge.
HPE-DARTS: Hybrid Pruning and Proxy Evaluation in Differentiable Architecture Search
259
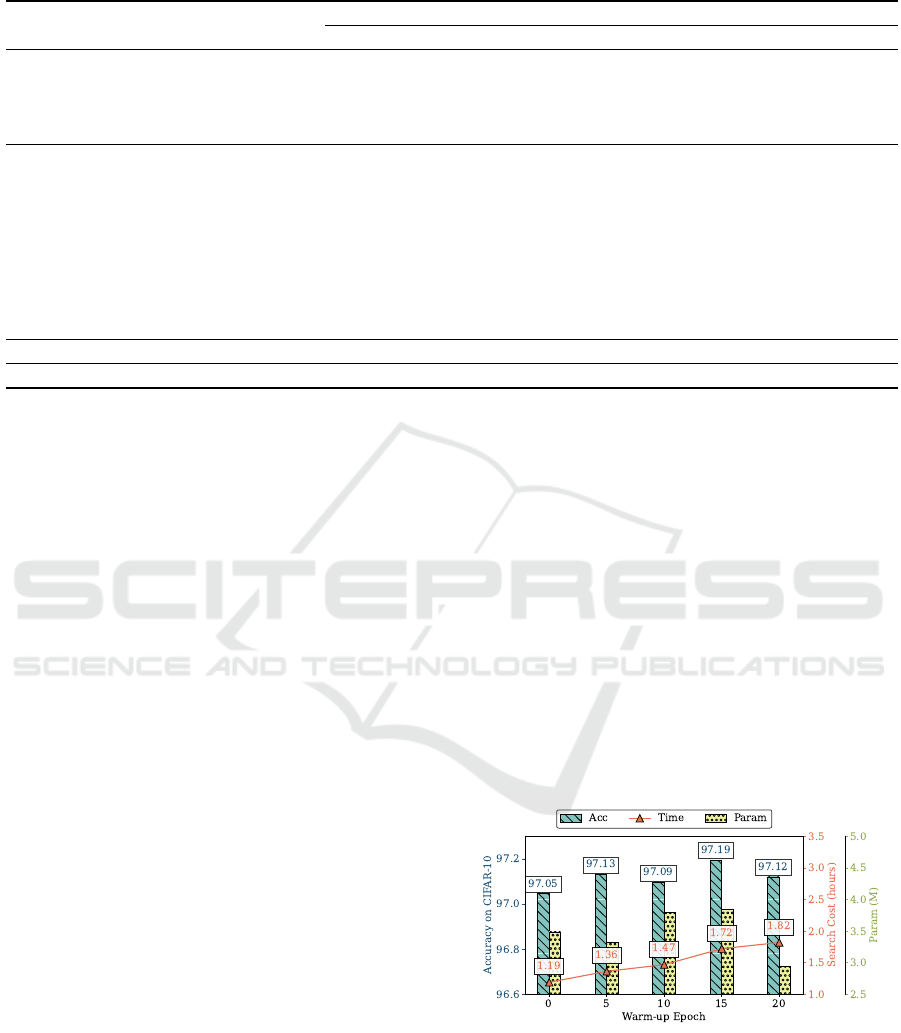
Table 1: Performance comparison on NAS-Bench-201 benchmark.
Methods
Search Cost
(hours)
CIFAR-10 CIFAR-100 ImageNet16-120
validation(%) test(%) validation(%) test(%) validation(%) test(%)
Non-weight sharing
Random Search
†
3.33 91.02 ± 0.34 93.73 ±0.37 71.21 ± 1.17 71.46 ± 1.21 44.87 ± 1.25 45.06 ± 1.37
REA
†
(Real et al., 2019) 3.33 91.17 ± 0.31 93.94 ±0.26 71.55 ± 0.77 71.91 ± 1.03 44.74 ± 0.93 45.24 ± 0.99
REINFORCE
†
(Williams, 1992) 3.33 90.07 ± 0.66 93.14 ± 0.65 69.87 ± 1.59 69.94 ± 1.51 43.30 ±1.51 43.24 ±1.90
BOHB
†
(Falkner et al., 2018) 3.33 89.43 ± 0.70 92.55 ±0.63 68.68 ± 1.20 68.54 ± 1.40 41.64 ± 1.58 41.67 ± 1.80
Weight sharing
RSPS (Li and Talwalkar, 2020) 0.80 81.04 ± 9.23 84.59 ±9.61 55.95 ± 8.85 55.92 ± 8.85 30.77 ± 6.69 30.00 ± 6.51
ENAS (Pham et al., 2018) 1.51 39.80 ± 3.54 55.76 ±3.22 14.17 ± 1.67 14.83 ± 1.54 16.17 ± 0.54 15.95 ± 0.71
GDAS (Dong and Yang, 2019b) 2.10 90.10 ± 0.17 93.44 ±0.14 70.89 ± 0.34 70.54 ± 0.24 41.71 ± 0.95 42.05 ± 0.82
SETN (Dong and Yang, 2019a) 3.18 84.00 ± 4.34 87.20 ± 3.74 58.40 ± 7.05 58.55 ±7.05 32.64 ± 5.32 31.91 ± 5.55
DARTS(1st) (Liu et al., 2019) 1.00 39.77 ± 0.00 54.30 ±0.00 15.03 ± 0.00 15.61 ± 0.00 16.43 ± 0.00 16.32 ± 0.00
DARTS(2nd) (Liu et al., 2019) 3.26 39.77 ± 0.00 54.30 ±0.00 15.03 ± 0.00 15.61 ± 0.00 16.43 ± 0.00 16.32 ± 0.00
DrNAS w/o PL
‡
(Chen et al., 2021a) 2.19 91.55 ± 0.00 94.36 ±0.00 73.49 ± 0.00 73.51 ± 0.00 46.37 ± 0.00 46.34 ± 0.00
DrNAS (Chen et al., 2021a) 1.66 90.20 ± 0.00 93.76 ±0.00 70.71 ± 0.00 71.11 ± 0.00 40.78 ± 0.00 41.44 ± 0.00
β-DARTS (Ye et al., 2022) 2.25 91.39 ± 0.17 94.13 ± 0.28 72.63 ± 0.98 72.74 ± 0.83 46.01 ± 0.35 45.59 ± 0.89
VP-DARTS (Feng and Wang, 2024) 2.06 91.28 ± 0.63 94.06 ± 0.44 72.61 ±1.38 72.61 ± 1.40 45.80 ± 1.55 46.00 ± 1.33
HPE-DARTS 0.61 91.52 ± 0.04 94.31 ±0.07 73.17 ± 0.34 73.24 ± 0.22 46.25 ± 0.28 46.42 ± 0.09
Optimal - 91.61 94.37 73.49 73.51 46.77 47.31
†
The search time limits to 12000 seconds
‡
Without progressive learning
4.2.3 Search Results
The experimental results are shown in Table 2. In
our experimental setup, all searches were conducted
on the CIFAR-10 dataset, while evaluations were
extended across multiple datasets, CIFAR-10 and
CIFAR-100, to assess generalizability. For robust-
ness, each reported result is derived from the aver-
age of three independent runs with different random
seeds, and we present the results as the average ± stan-
dard deviation. The result shows that HPE-DARTS
achieves comparable results to the best-performing
state-of-the-art methods, with an accuracy of 97.26 ±
0.14% on CIFAR-10 and 82.67 ± 0.29% on CIFAR-
100. However, the search process on the CIFAR-10
dataset was completed in just 1.34 hours, requiring
only 6% of the time taken by VP-DARTS, which was
completed in 23.00 hours. Furthermore, the quick-
est among the evaluated state-of-the-art methods prior
to HPE-DARTS was P-DARTS, which completed its
search in 2.44 hours. HPE-DARTS completed the
search process in approximately 55% of the time
taken by P-DARTS, while still achieving competi-
tive accuracies on both CIFAR-10 and CIFAR-100
datasets. These results highlight HPE-DARTS’s abil-
ity to maintain competitive performance while dras-
tically reducing the computational overhead, making
it an attractive option for efficient yet effective neural
architecture search.
4.3 Ablation Study
4.3.1 Number of Warm-up Epoches
The choice of setting warm-up epochs is crucial in
our approach, because it allows the network param-
eters to stabilize before engaging in more computa-
tionally intensive pruning operations. We varied the
warm-up epochs across four settings: 0, 5, 10, 15,
and 20 epochs, while keeping the pruning epoch fixed
at 5. For each configuration, we measured CIFAR-10
accuracy, search cost in hours, and the number of pa-
rameters of searched architecture, aiming to identify
a sweet spot where the increase in accuracy justifies
the additional computational expense.
Figure 8: Comparison of HPE-DARTS using different
Warm-up Epochs when Pruning Epochs set to 5. In this
figure, the left blue bars represent the accuracy on CIFAR-
10, and the red line stands for the search cost in hours. The
number of parameters of the searched model is presented as
the right green bars.
The results, as illustrated in Figure 8, clearly show
that increasing the warm-up period from 0 to 5 epochs
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
260
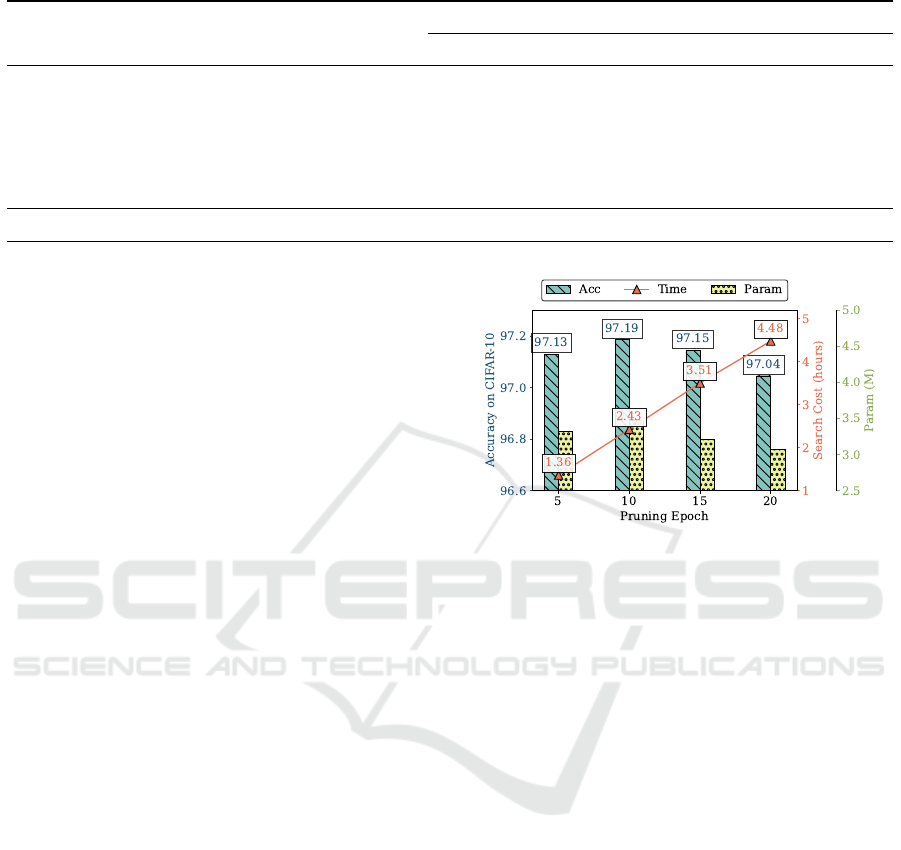
Table 2: Performance comparison on DARTS search space.
Methods
Search Cost
(hours)
CIFAR-10 CIFAR-100
Params(M) Acc(%) Params(M) Acc(%)
DARTS(1st) (Liu et al., 2019) 3.11 3.34 97.41 ± 0.12 3.39 83.22 ± 0.45
DARTS(2nd) (Liu et al., 2019) 12.67 3.13 97.30 ± 0.10 3.18 82.64 ± 0.23
P-DARTS (Chen et al., 2019) 2.44 3.47 97.28 ± 0.13 3.52 82.53 ± 0.41
DrNAS (Chen et al., 2021a) 6.05 4.70 97.03 ± 0.15 4.75 82.66 ± 0.52
β-DARTS (Ye et al., 2022) 3.01 3.92 96.48 ± 0.62 3.97 80.66 ± 1.18
VP-DARTS (Feng and Wang, 2024) 23.00 2.44 96.92 ± 0.19 2.49 81.21 ± 0.56
HPE-DARTS 1.34 3.42 97.26 ± 0.14 3.47 82.67 ± 0.29
leads to an improvement in accuracy, from approx-
imately 97.05% to 97.13%, representing the impor-
tance of the warm-up stage. This increase in accuracy
is achieved with a modest increase in search cost from
1.19 hours to 1.36 hours, highlighting an efficient
balance between computational expense and perfor-
mance enhancement. While extending the warm-up
period to 15 epochs achieves the highest accuracy of
97.19%, the corresponding search cost of 1.72 hours
represents a larger jump in computational demand.
By choosing 5 epochs, the approach efficiently man-
ages to balance accuracy with the computational cost
and complexity of the model.
4.3.2 Number of Pruning Epoches
The choice of setting pruning epochs is also important
in our approach because it decides how many epochs
the soft pruning technique would be applied. We var-
ied the warm-up epochs across four settings: 5, 10,
15, and 20 epochs, while keeping the warm epoch
fixed at 5 to experiment with how different pruning
epochs impact both the accuracy on CIFAR-10 and
the search cost in hours and trying to find which num-
ber of pruning epochs is suitable for our approach.
As shown in Figure 9, it illustrates a clear trend
where extending the pruning epoch length signifi-
cantly increases the computational cost, while the
benefits in accuracy do not consistently increase with
pruning epochs. At 5 pruning epochs, the model
achieves a commendable accuracy of 97.13% on
CIFAR-10. While there is a slight peak in accuracy
at 10 pruning epochs (97.19%), the corresponding in-
crease in search cost—from 1.36 hours at 5 epochs to
2.43 hours at 10 epochs—suggests a substantial rise in
computational demands. Further extending the prun-
ing epochs to 10, 15, or 20 shows either minor im-
provements or declines in accuracy but with dispro-
portionate increases in search time and costs.
The increase in search time and computational re-
sources required beyond 5 epochs does not justify the
marginal gains in performance, underscoring why 5
Figure 9: Comparison of HPE-DARTS using different
Pruning Epochs when Warm-up Epochs set to 5. This figure
illustrates the accuracy (blue bars, left y-axis), search cost
in hours (red line, right y-axis), and number of parameters
of the searched model (green bars, right y-axis) at pruning
epochs 5, 10, 15, and 20. The search cost at 5 epochs (1.34
hours) provides an optimal balance between high accuracy
(97.06%) and computational efficiency
epochs is the selected setting in our optimized ap-
proach. This choice ensures that our methodology re-
mains computationally feasible while still providing
competitive performance.
4.3.3 Number of Stages and Operations to Hard
Pruning
The list of numbers of operations influences how
many less important operations would be hard pruned,
which would also affect the number of hybrid pruning
stages in the search and the search time of the search.
In this experiment, both the warm-up epoch and prun-
ing epoch are set to 5 and all the settings are presented
in a list that represents the operations remaining at
each hybrid stage.
As indicated in Table 3, the selection of the [8, 5,
3, 1] setting for hard pruning operations represents an
optimal balance between search cost, model complex-
ity, and accuracy on CIFAR-10. This setting leads to a
search cost of 1.34 hours, which is considerably effi-
cient compared to all the other settings. While the [8,
HPE-DARTS: Hybrid Pruning and Proxy Evaluation in Differentiable Architecture Search
261
5, 3, 1] setting slightly increases the search duration
compared to the [8, 4, 1] setting, which has the low-
est cost of 1.05 hours, it achieves a higher accuracy of
97.26% compared to 97.14% offered by the [8, 4, 1]
setting. The [8, 5, 3, 1] setting thus provides an effec-
tive trade-off between performance and efficiency for
the hard pruning part of our approach.
Table 3: Comparison between using different settings to
hard pruning operations.
Settings
Number
of Stages
Search Cost
(hours)
Params(M) CIFAR-10 Acc(%)
[8, 7, 6,5,4, 3, 2, 1] 7 2.73 2.94 97.04 ± 0.06
[8, 6, 4,2,1] 4 1.65 3.14 97.06 ± 0.13
[8, 5, 2,1] 3 1.30 3.51 97.10 ± 0.28
[8, 4, 1] 2 1.05 3.60 97.14 ± 0.01
[8, 5, 3,1] 3 1.34 3.52 97.26 ± 0.14
4.3.4 Impact of NetPerfProxy Modifications
NetPerfProxy enhances the original NASWOT frame-
work by incorporating the architecture parameters of
the operations with the NASWOT score, and this
modification allows NetPerfProxy to better predict the
actual performance of architectures by considering
how different operations weighted by their architec-
ture parameters influence the overall network perfor-
mance. As demonstrated in Table 4, NetPerfProxy
not only achieves a higher CIFAR-10 accuracy but
also with a small increase in search cost compared to
NASWOT, making NetPerfProxy an efficient tool to
conduct a search on DARTS-like search spaces.
Table 4: Comparison between using NASWOT (Mellor
et al., 2021) and NetPerfProxy on DARTS search space.
Methods Settings
Search Cost
(hours)
Params(M) CIFAR-10 Acc(%)
HPE-DARTS
NASWOT 1.29 2.81 96.78±0.19
NetPerfProxy 1.34 3.52 97.26 ± 0.14
5 CONCLUSIONS
In this paper, we presented a NAS method called
HPE-DARTS that integrates soft and hard pruning
with a novel evaluation strategy, NetPerfProxy, to re-
duce time and resource consumption in differentiable
architecture searches. HPE-DARTS accelerates the
search process while maintaining competitive perfor-
mance compared to state-of-the-art methods. It em-
ploys a warm-up phase to explore diverse architec-
tural configurations, followed by iterative pruning to
refine operations systematically, resulting in efficient
convergence to high-performing models. NetPerf-
Proxy enhances evaluation efficiency in DARTS-like
search spaces, eliminating reliance on extensive val-
idation. Currently tailored for convolutional neural
networks, HPE-DARTS demonstrates strong poten-
tial for scalability. In the future, we will explore
its application to larger datasets and complex archi-
tectures like transformers and incorporate progres-
sive techniques to further advance neural architecture
search capabilities.
REFERENCES
Baker, B., Gupta, O., Naik, N., and Raskar, R. (2017). De-
signing neural network architectures using reinforce-
ment learning. In Proceedings of International Con-
ference on Learning Representations.
Bender, G., Kindermans, P.-J., Zoph, B., Vasudevan, V., and
Le, Q. (2018). Understanding and simplifying one-
shot architecture search. In Proceedings of Interna-
tional Conference on Machine Learning, pages 550–
559.
Chen, X., Wang, R., Cheng, M., Tang, X., and Hsieh, C.-J.
(2021a). DrNAS: Dirichlet neural architecture search.
In Proceedings of International Conference on Learn-
ing Representations.
Chen, X., Xie, L., Wu, J., and Tian, Q. (2019). Progressive
differentiable architecture search: Bridging the depth
gap between search and evaluation. In Proceedings
of IEEE/CVF International Conference on Computer
Vision, pages 1294–1303.
Chen, X., Xie, L., Wu, J., and Tian, Q. (2021b). Progres-
sive darts: Bridging the optimization gap for nas in
the wild. International Journal of Computer Vision,
129:638–655.
Chu, X., Wang, X., Zhang, B., Lu, S., Wei, X., and Yan,
J. (2021). DARTS-: Robustly stepping out of per-
formance collapse without indicators. In Proceedings
of International Conference on Learning Representa-
tions.
Chu, X., Zhou, T., Zhang, B., and Li, J. (2020). Fair
DARTS: Eliminating unfair advantages in differen-
tiable architecture search. In Proceedings of Euro-
pean Conference on Computer Vision, pages 465–480.
Springer.
Dong, X. and Yang, Y. (2019a). One-shot neural architec-
ture search via self-evaluated template network. In
Proceedings of IEEE/CVF International Conference
on Computer Vision, pages 3680–3689.
Dong, X. and Yang, Y. (2019b). Searching for a robust neu-
ral architecture in four gpu hours. In Proceedings of
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 1761–1770.
Dong, X. and Yang, Y. (2020). Nas-bench-201: Extending
the scope of reproducible neural architecture search.
In Proceedings of International Conference on Learn-
ing Representations.
Elsken, T., Metzen, J. H., and Hutter, F. (2019). Neural
architecture search: A survey. Journal of Machine
Learning Research, 20(55):1–21.
Falkner, S., Klein, A., and Hutter, F. (2018). BOHB: Robust
and efficient hyperparameter optimization at scale. In
ICAART 2025 - 17th International Conference on Agents and Artificial Intelligence
262

Proceedings of International Conference on Machine
Learning, pages 1437–1446.
Feng, T.-C. and Wang, S.-D. (2024). VP-DARTS: Validated
pruning differentiable architecture search. In Proceed-
ings of International Conference on Agents and Arti-
ficial Intelligence, pages 47–57.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 770–778.
Krizhevsky, A., Hinton, G., et al. (2009). Learning multiple
layers of features from tiny images.
Kyriakides, G. and Margaritis, K. (2020). An introduction
to neural architecture search for convolutional net-
works. arXiv:2005.11074.
Li, G., Qian, G., Delgadillo, I. C., M
¨
uller, M., Thabet, A.,
and Ghanem, B. (2020). Sgas: Sequential greedy ar-
chitecture search. In Proceedings of IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition,
pages 1617–1627.
Li, L. and Talwalkar, A. (2020). Random search and repro-
ducibility for neural architecture search. In Proceed-
ings of Uncertainty in Artificial Intelligence Confer-
ence, pages 367–377.
Liang, H., Zhang, S., Sun, J., He, X., Huang, W., Zhuang,
K., and Li, Z. (2019). Darts+: Improved dif-
ferentiable architecture search with early stopping.
arXiv:1909.06035.
Liu, H., Simonyan, K., and Yang, Y. (2019). DARTS: Dif-
ferentiable architecture search. In Proceedings of In-
ternational Conference on Learning Representations.
Mellor, J., Turner, J., Storkey, A., and Crowley, E. J.
(2021). Neural architecture search without training. In
Proceedings of International Conference on Machine
Learning, pages 7588–7598.
Pham, H., Guan, M., Zoph, B., Le, Q., and Dean, J.
(2018). Efficient neural architecture search via param-
eters sharing. In Proceedings of International Confer-
ence on Machine Learning, pages 4095–4104.
Real, E., Aggarwal, A., Huang, Y., and Le, Q. V. (2019).
Regularized evolution for image classifier architecture
search. Proceedings of AAAI Conference on Artificial
Intelligence, 33(01):4780–4789.
Real, E., Moore, S., Selle, A., Saxena, S., Suematsu, Y. L.,
Tan, J., Le, Q. V., and Kurakin, A. (2017). Large-scale
evolution of image classifiers. In Proceedings of In-
ternational Conference on Machine Learning, pages
2902–2911.
Ren, P., Xiao, Y., Chang, X., Huang, P.-y., Li, Z., Chen,
X., and Wang, X. (2021). A comprehensive survey of
neural architecture search: Challenges and solutions.
ACM Computing Surveys, 54(4):1–34.
Saxena, S. and Verbeek, J. (2016). Convolutional neural
fabrics. In Proceedings of Advances in Neural Infor-
mation Processing Systems.
Simonyan, K. and Zisserman, A. (2015). Very deep convo-
lutional networks for large-scale image recognition. In
Proceedings of International Conference on Learning
Representations.
Wang, R., Cheng, M., Chen, X., Tang, X., and Hsieh, C.-J.
(2021). Rethinking architecture selection in differen-
tiable NAS. In Proceedings of International Confer-
ence on Learning Representations.
White, C., Safari, M., Sukthanker, R., Ru, B., Elsken,
T., Zela, A., Dey, D., and Hutter, F. (2023). Neu-
ral architecture search: Insights from 1000 papers.
arXiv:2301.08727.
Williams, R. J. (1992). Simple statistical gradient-following
algorithms for connectionist reinforcement learning.
Machine learning, 8:229–256.
Wu, M.-T., Lin, H.-I., and Tsai, C.-W. (2022). A training-
free genetic neural architecture search. In Proceedings
of ACM International Conference on Intelligent Com-
puting and Its Emerging Applications, page 65–70.
Wu, M.-T., Lin, H.-I., and Tsai, C.-W. (2024). A training-
free neural architecture search algorithm based on
search economics. IEEE Transactions on Evolution-
ary Computation, 28(2):445–459.
Xie, L., Chen, X., Bi, K., Wei, L., Xu, Y., Wang, L.,
Chen, Z., Xiao, A., Chang, J., Zhang, X., and Tian,
Q. (2021). Weight-sharing neural architecture search:
A battle to shrink the optimization gap. ACM Com-
puting Surveys, 54(9):1–37.
Xie, L. and Yuille, A. (2017). Genetic cnn. In Proceedings
of IEEE/CVF International Conference on Computer
Vision, pages 1388–1397.
Xu, Y., Xie, L., Zhang, X., Chen, X., Qi, G.-J., Tian, Q.,
and Xiong, H. (2020). PC-DARTS: Partial channel
connections for memory-efficient architecture search.
In Proceedings of International Conference on Learn-
ing Representations.
Ye, P., Li, B., Li, Y., Chen, T., Fan, J., and Ouyang,
W. (2022). β-DARTS: Beta-decay regularization for
differentiable architecture search. In Proceedings of
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 10864–10873.
Zela, A., Elsken, T., Saikia, T., Marrakchi, Y., Brox, T., and
Hutter, F. (2020). Understanding and robustifying dif-
ferentiable architecture search. In Proceedings of In-
ternational Conference on Learning Representations.
Zoph, B. and Le, Q. (2017). Neural architecture search
with reinforcement learning. In Proceedings of Inter-
national Conference on Learning Representations.
Zoph, B., Vasudevan, V., Shlens, J., and Le, Q. V. (2018).
Learning transferable architectures for scalable image
recognition. In Proceedings of IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
8697–8710.
HPE-DARTS: Hybrid Pruning and Proxy Evaluation in Differentiable Architecture Search
263
